
Research Progress of Wireless Positioning Methods Based on RSSI


Abstract
1. Introduction
- The application scenarios and existing problems of wireless location are described, and the importance of wireless location is explained.
- The commonly used RSSI positioning methods, data acquisition methods and evaluation methods are summarized, which provides convenience for beginners.
- The improved methods based on RSSI positioning are analyzed, which points out the right direction for researchers.
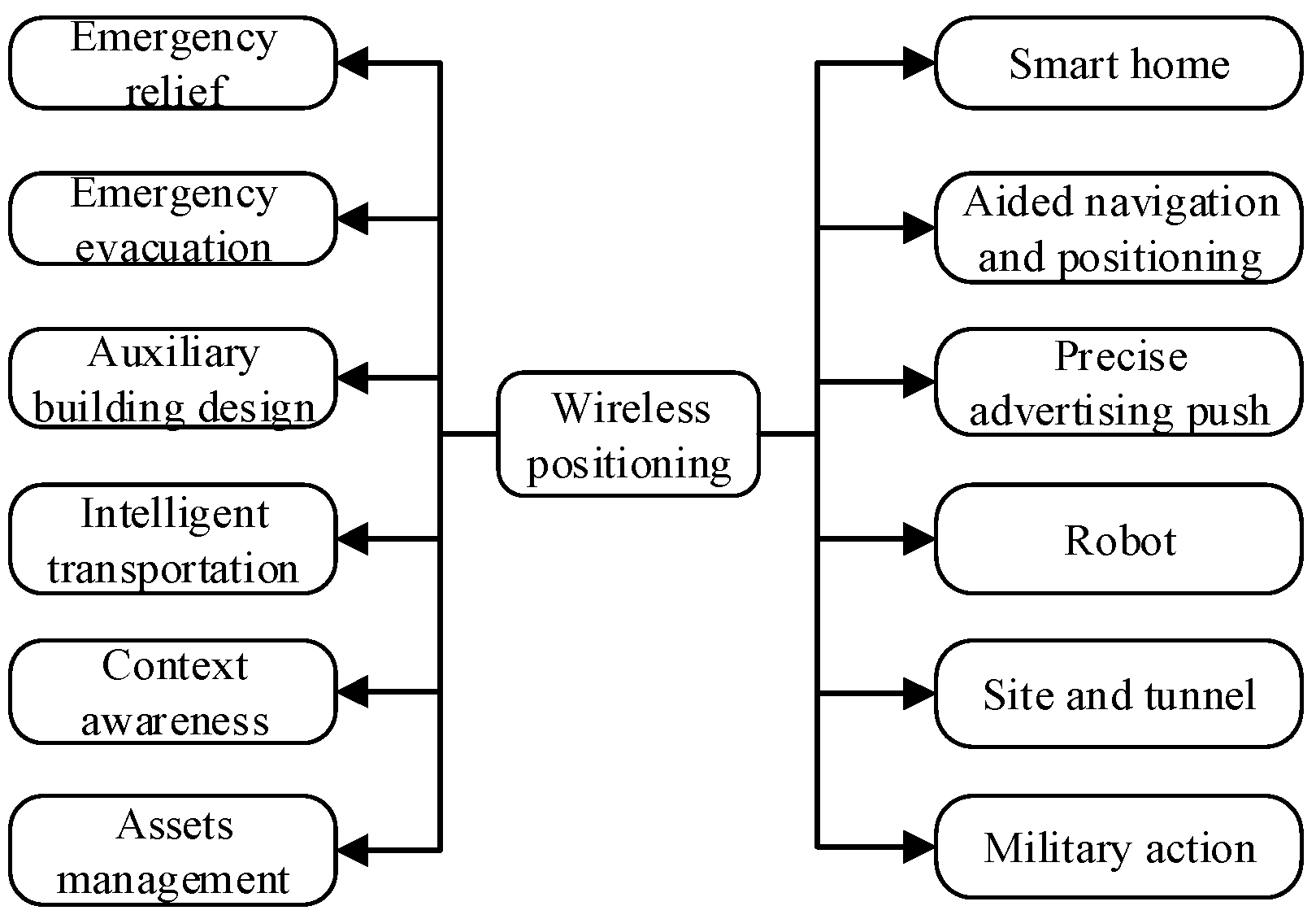
2. Application
3. Evaluation Methods
4. Positioning Method
4.1. Based on Ranging
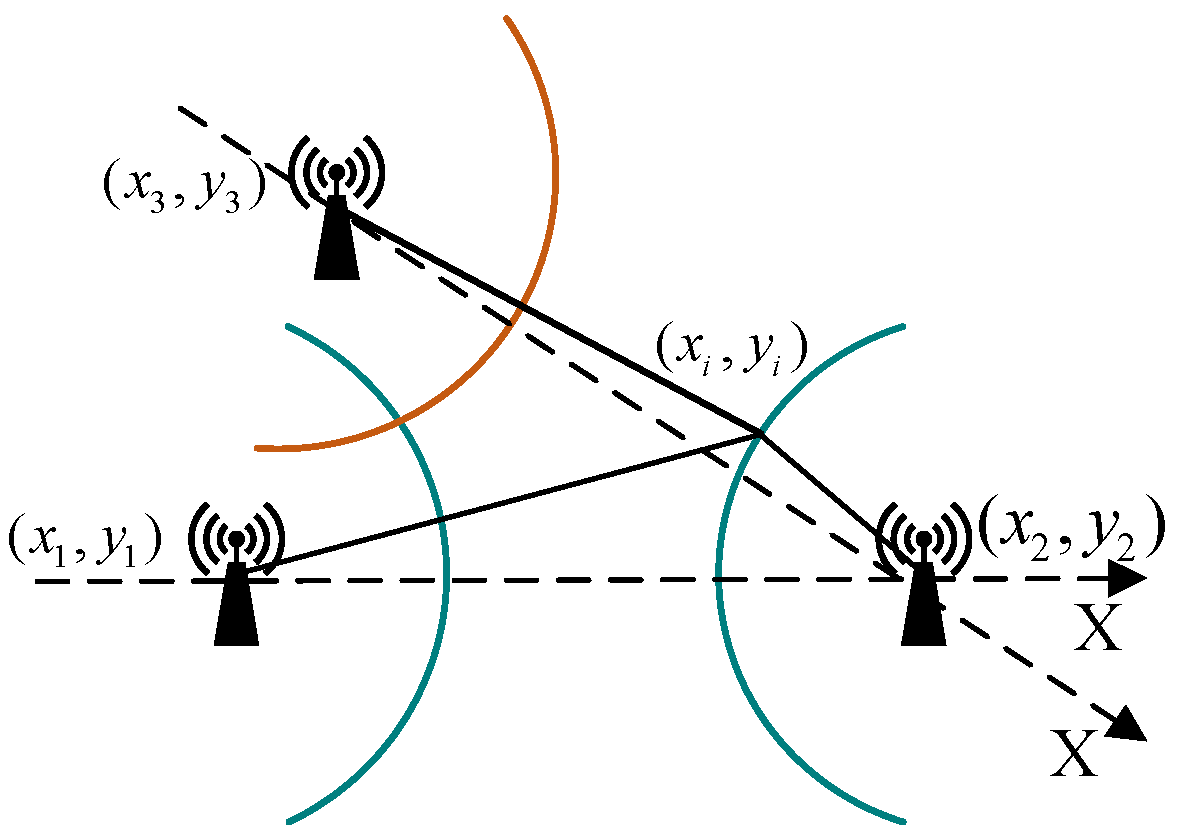
4.1.1. Trilateral Positioning Method
4.1.2. Triangulation Method
4.1.3. Time Difference of Arrival
4.2. Based on Non-Ranging
4.2.1. Approximation
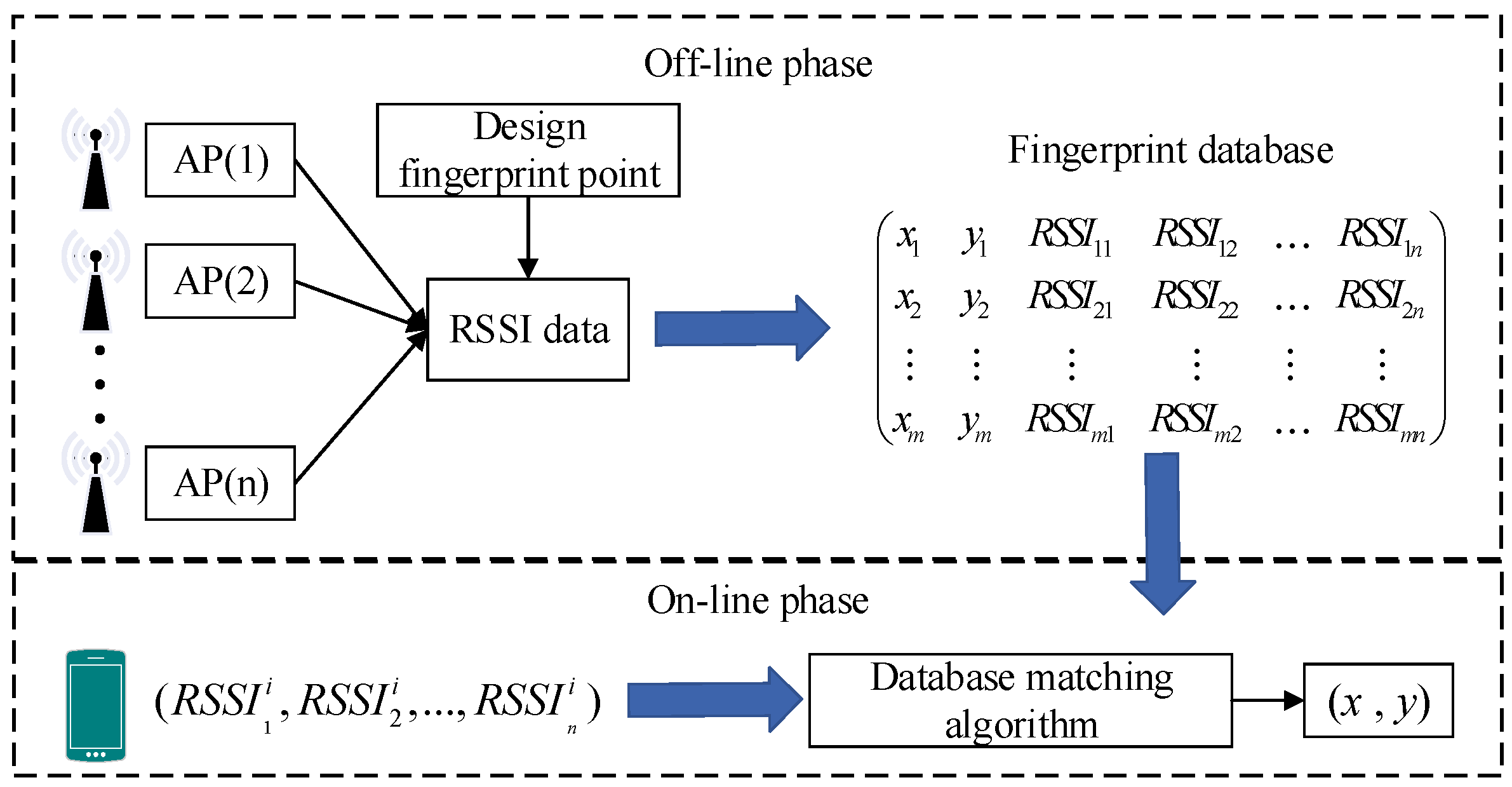
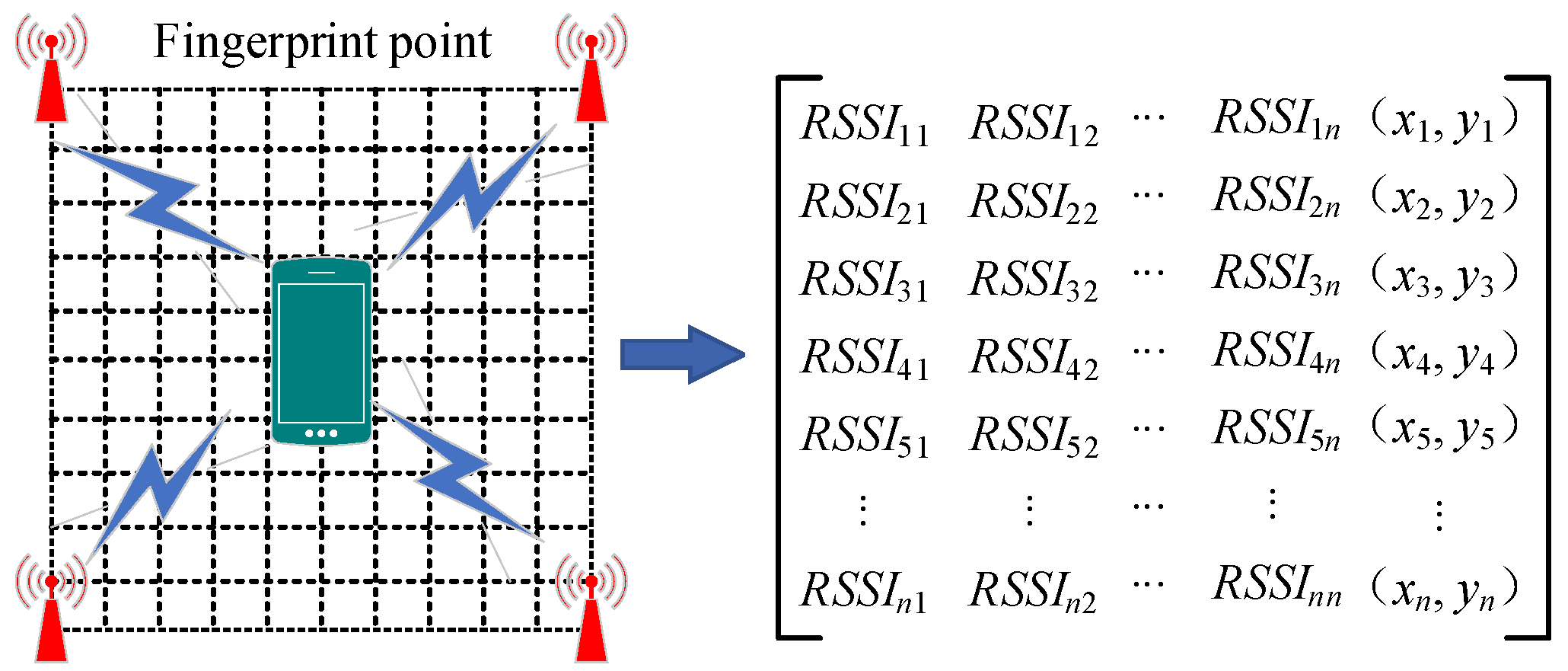
4.2.2. Database Matching Method
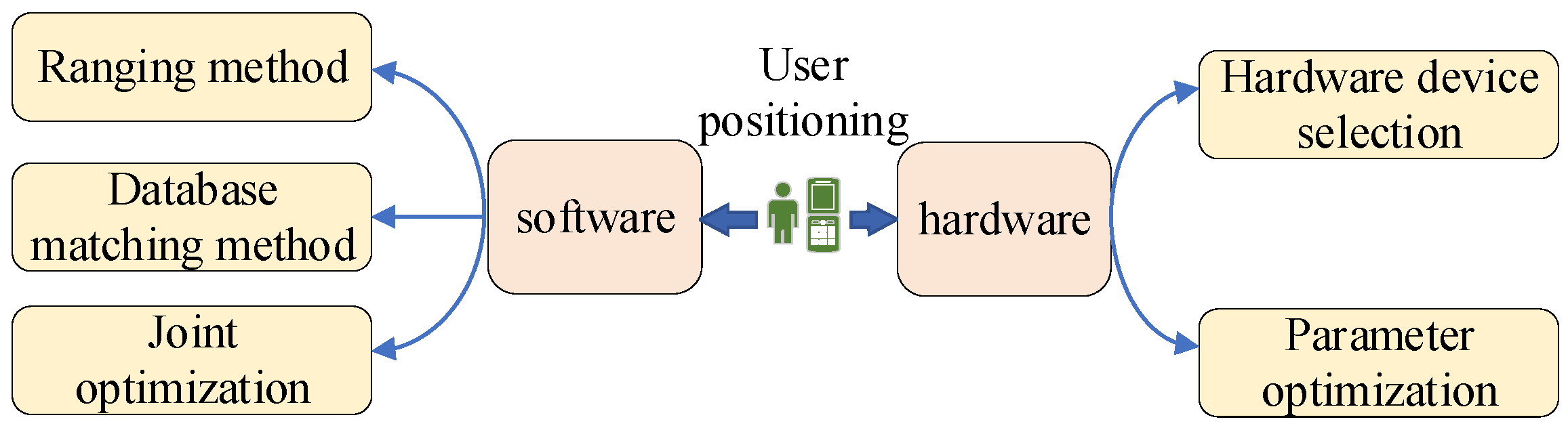
5. Optimization Methods
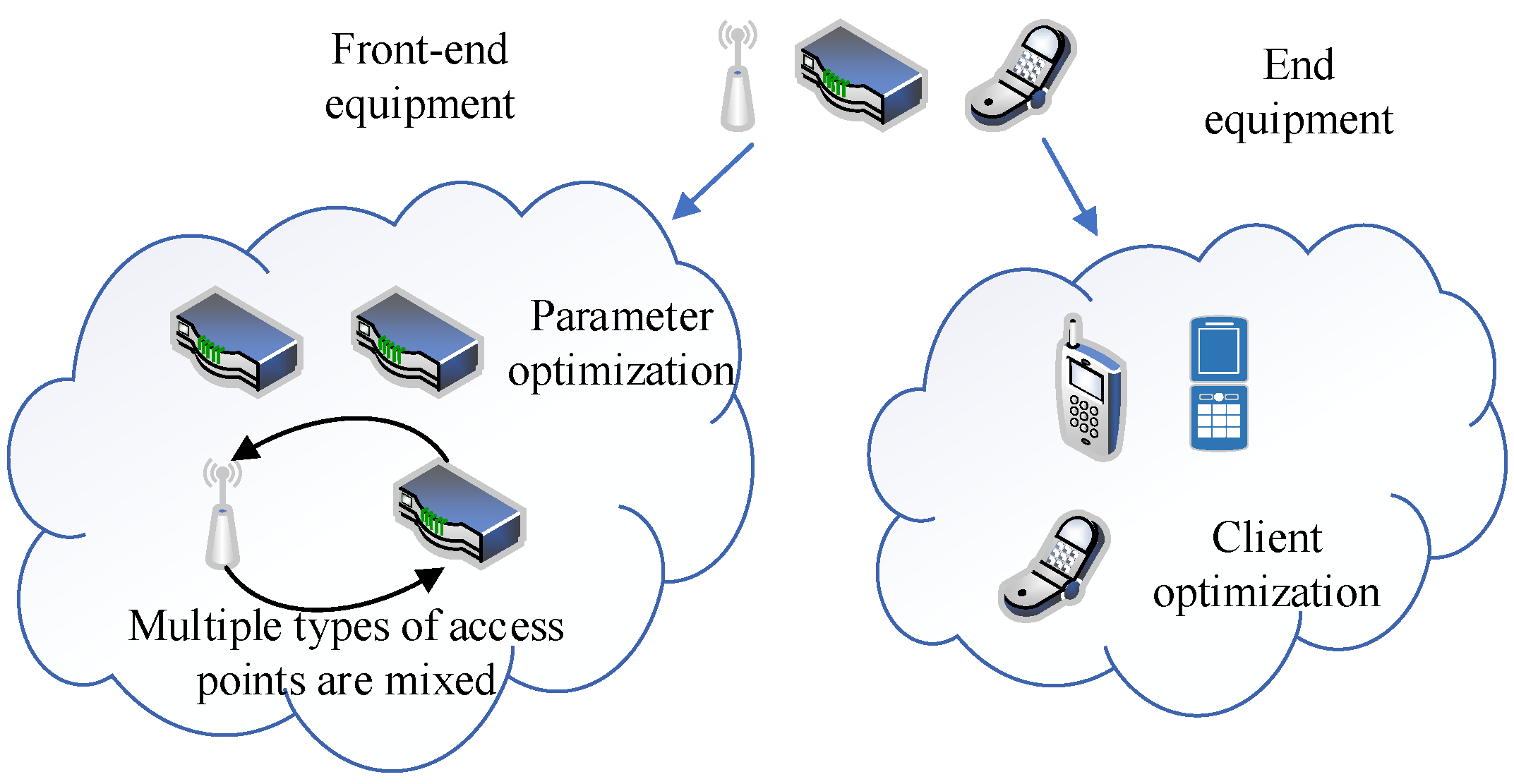
5.1. Optimization of Hardware Device
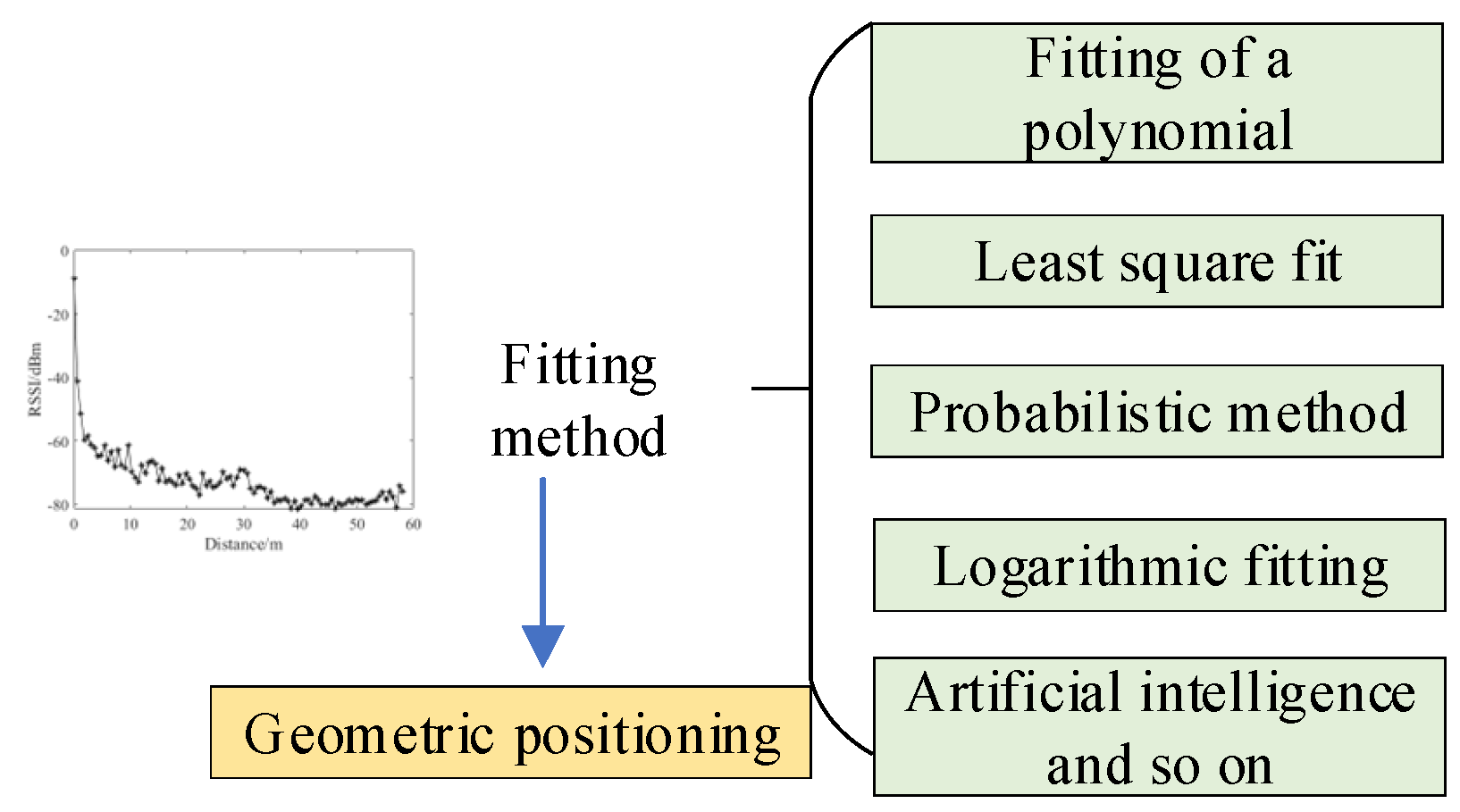
5.2. Optimization Based on Ranging Methods
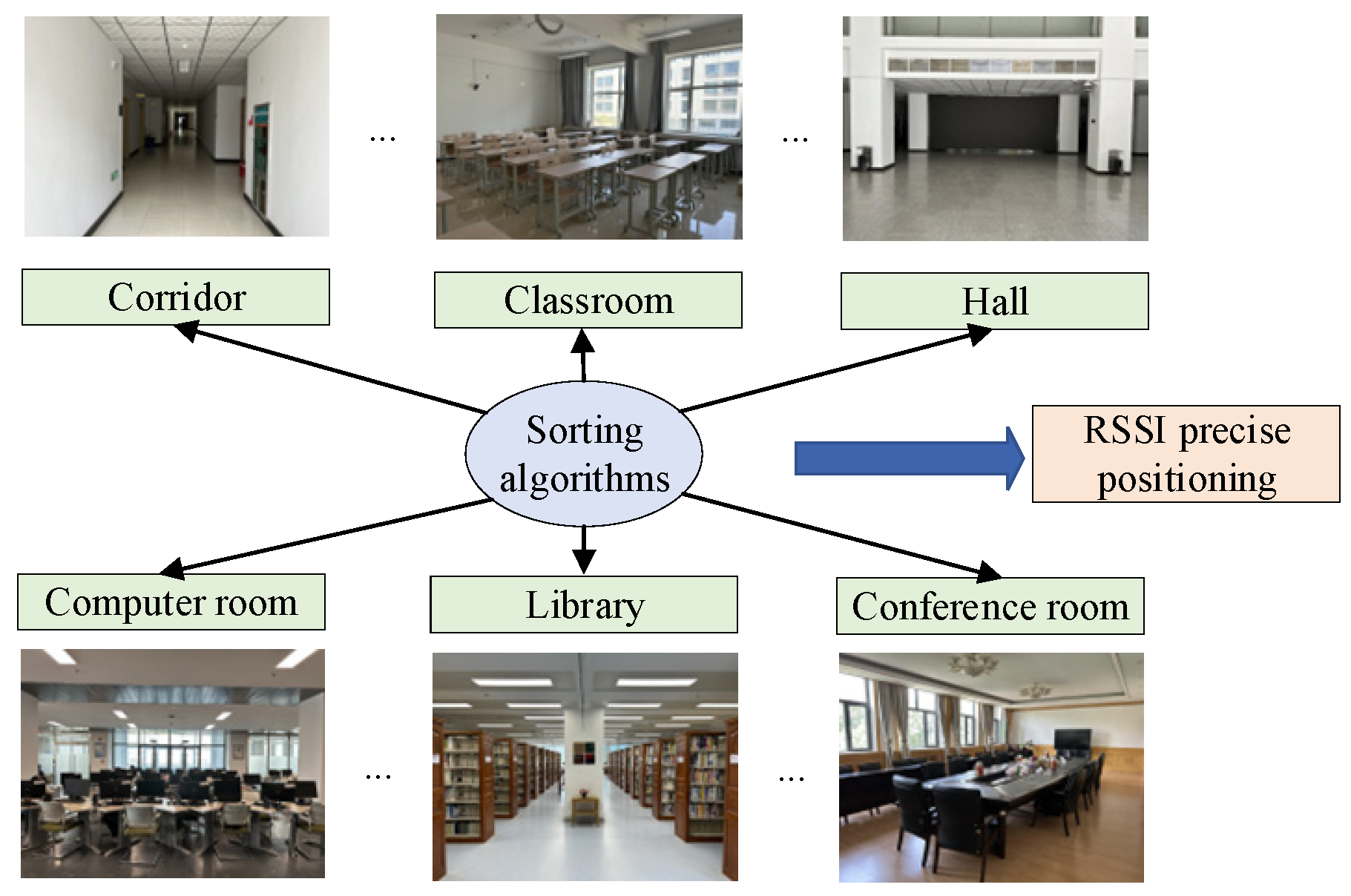
5.3. Optimization Based on Database Matching Methods
5.4. Combined Optimization
5.4.1. Combined with Inertial Sensor
5.4.2. Integration with Image-Based Methods
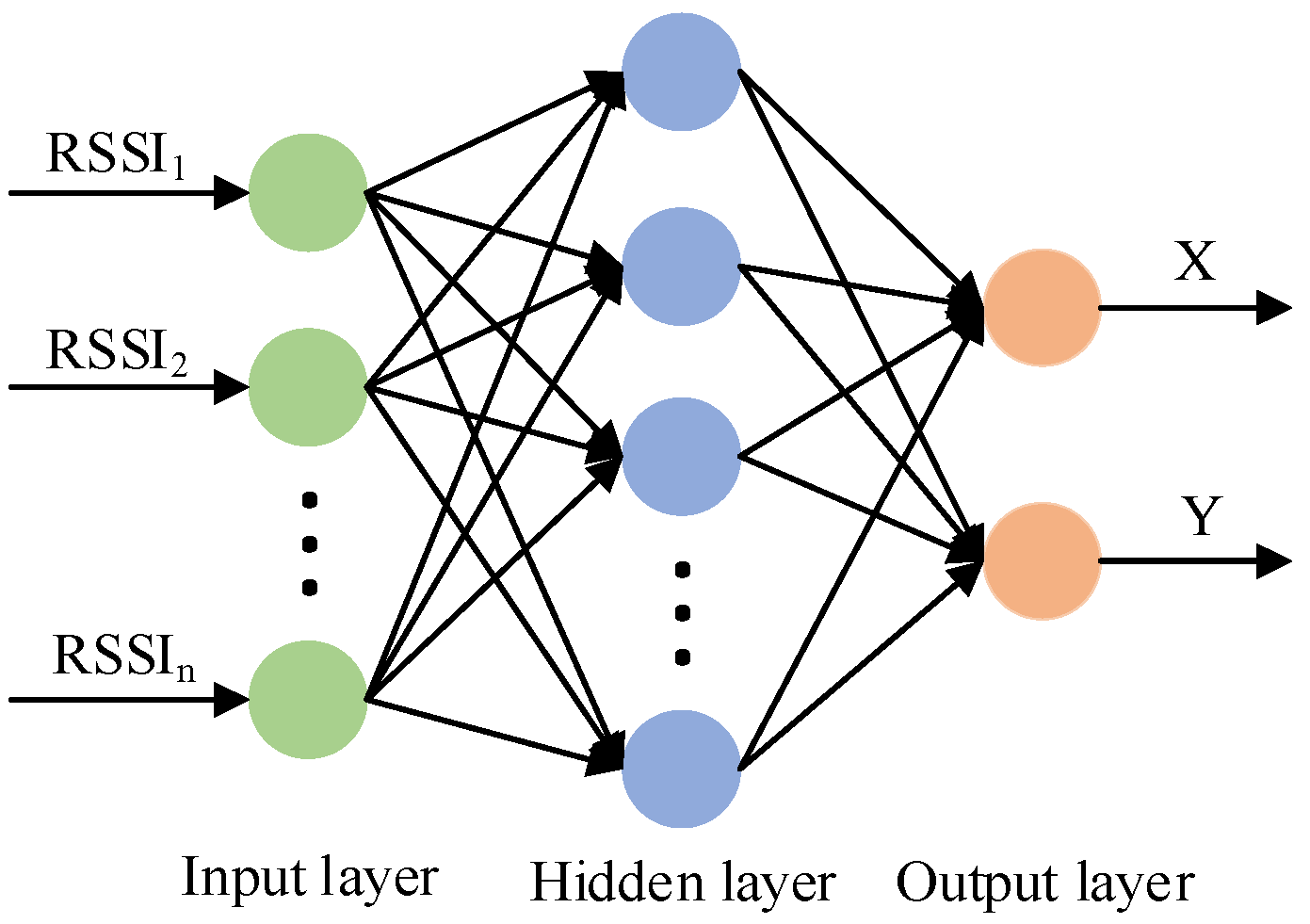
5.4.3. Methods Combined with Neural Networks
6. Data Acquisition
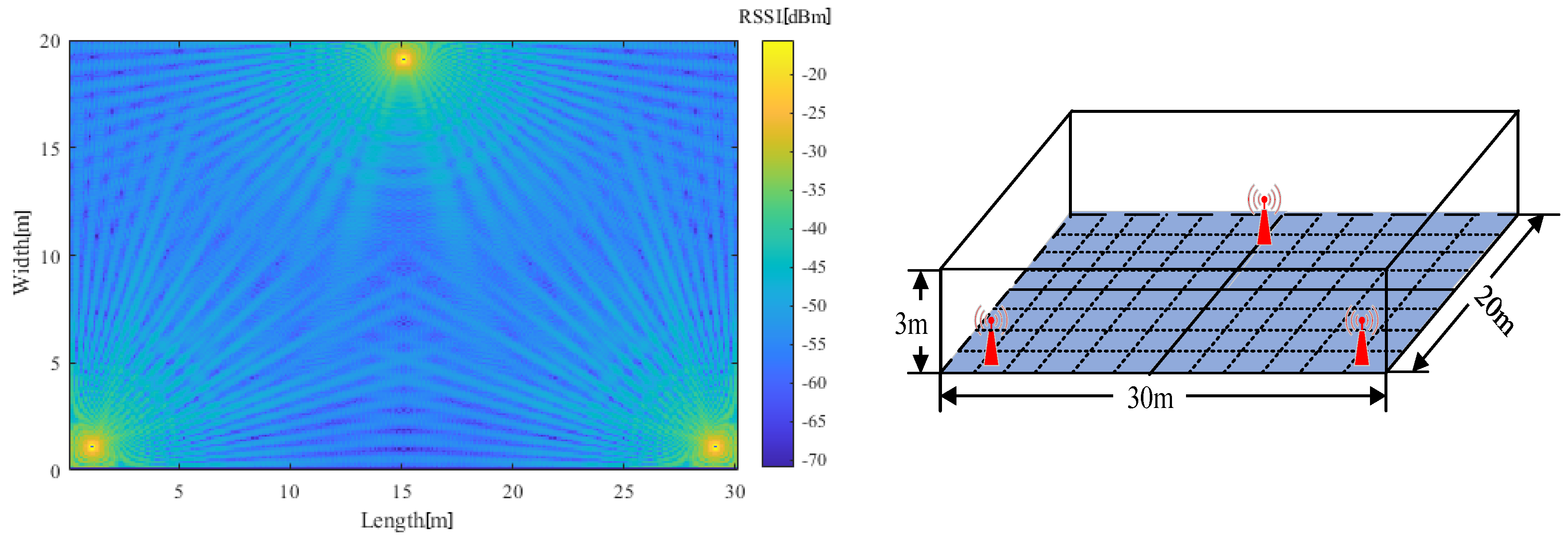
6.1. Simulation Data
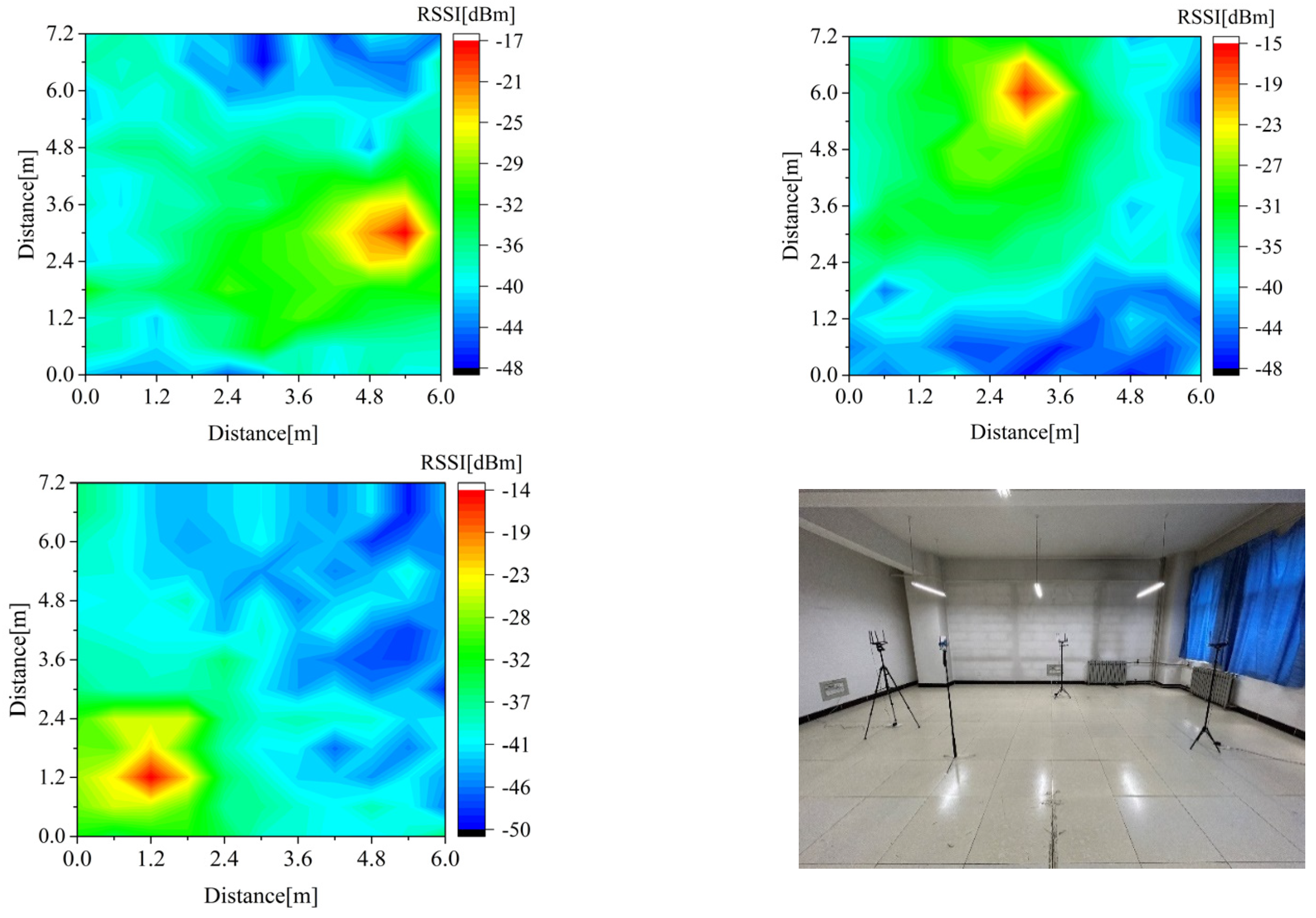
6.2. Real Data Acquisition
6.3. Publicly Available Datasets
7. Remaining Problems and Development Trends
7.1. Current Challenges
7.2. Development Trends
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Asaad, S.M.; Maghdid, H.S. Novel integrated matching algorithm using a deep learning algorithm for Wi-Fi fingerprint-positioning technique in the indoors-IoT era. PeerJ Comput. Sci. 2023, 9, e1406. [Google Scholar] [CrossRef]
- Li, C.T.; Cheng, J.C.; Chen, K. Top 10 technologies for indoor positioning on construction sites. Autom. Constr. 2020, 118, 103309. [Google Scholar] [CrossRef]
- Filus, K.; Nowak, S.; Domańska, J.; Duda, J. Cost-effective filtering of unreliable proximity detection results based on BLE RSSI and IMU readings using smartphones. Sci. Rep. 2022, 12, 2440. [Google Scholar] [CrossRef]
- Feng, P.; Qin, D.; Zhao, M.; Guo, R.; Berhane, T.M. Unsupervised Indoor Positioning System Based on Environmental Signatures. Entropy 2019, 21, 327. [Google Scholar] [CrossRef]
- Zhang, W.; Yang, X. DV-Hop Location Algorithm Based on RSSI Correction. Electronics 2023, 12, 1141. [Google Scholar] [CrossRef]
- Han, Z.; Wang, Z.; Huang, H.; Zhao, L.; Su, C. WiFi-Based Indoor Positioning and Communication: Empirical Model and Theoretical Analysis. Wirel. Commun. Mob. Comput. 2022, 2022, 2364803. [Google Scholar] [CrossRef]
- Lee, H.; Lee, J. Convolutional Model with a Time Series Feature Based on RSSI Analysis with the Markov Transition Field for Enhancement of Location Recognition. Sensors 2023, 23, 3453. [Google Scholar] [CrossRef]
- Biswas, D.; Barai, S.; Sau, B. New RSSI-fingerprinting-based smartphone localization system for indoor environments. Wirel. Netw. 2023, 29, 1281–1297. [Google Scholar] [CrossRef]
- Poulose, A.; Han, D.S. Hybrid Deep Learning Model Based Indoor Positioning Using Wi-Fi RSSI Heat Maps for Autonomous Applications. Electronics 2021, 10, 2. [Google Scholar] [CrossRef]
- Booranawong, A.; Thammachote, P.; Sasiwat, Y.; Auysakul, J.; Sengchuai, K.; Buranapanichkit, D.; Tanthanuch, S.; Jindapetch, N.; Saito, H. Real-time tracking of a moving target in an indoor corridor of the hospital building using RSSI signals received from two reference nodes. Med. Biol. Eng. Comput. 2022, 60, 439–458. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, Z.; Chen, Y.; Ge, J.; Zhao, N. Adversarial Attack and Defense on Deep Learning for Air Transportation Communication Jamming. IEEE Trans. Intell. Transp. Syst. 2023. [Google Scholar] [CrossRef]
- Oryad, F.E.; Amindavar, H. Wireless positioning based on hierarchical symbolic dynamic filtering of RSSI time series. Signal Process. 2023, 206, 108903. [Google Scholar] [CrossRef]
- Biswas, D.; Barai, S.; Sau, B. Enhanced RSSI-Based Real-Time Position-Tracking System in Vehicular Networks. IEEE Sensors Lett. 2022, 6, 7500604. [Google Scholar] [CrossRef]
- Wattananavin, T.; Auysakul, J.; Tanthanuch, S.; Buranapanichkit, D.; Sengchuai, K.; Jindapetch, N.; Booranawong, A. How Acquired Log-Distance Path-Loss Equations Affect the Accuracy of Lateration and WCL Methods: An Experimental Comparison. J. Electr. Eng. Technol. 2023, 18, 599–614. [Google Scholar] [CrossRef]
- Deng, S.; Zhang, W.; Xu, L.; Yang, J. RRIFLoc: Radio Robust Image Fingerprint Indoor Localization Algorithm Based on Deep Residual Networks. IEEE Sensors J. 2022, 23, 3233–3242. [Google Scholar] [CrossRef]
- Yu, X.; Wang, S.; Xiao, F. Applications of Nondominated Sorting Genetic Algorithm II Combined with WKNN Online Matching Algorithm in Building Indoor Optimization Design. Comput. Intell. Neurosci. 2022, 2022, 7509659. [Google Scholar] [CrossRef]
- Oda, M.; Takyu, O.; Ohta, M.; Fujii, T.; Adachi, K. Position Estimation of Radio Source Based on Fingerprinting with Physical Wireless Parameter Conversion Sensor Networks. IEEE Access 2023, 11, 12843–12857. [Google Scholar] [CrossRef]
- Csik, D.; Odry, Á.; Sarcevic, P. Fingerprinting-Based Indoor Positioning Using Data Fusion of Different Radiocommunication-Based Technologies. Machines 2023, 11, 302. [Google Scholar] [CrossRef]
- Achroufene, A. RSSI-based geometric localization in wireless sensor networks. J. Supercomput. 2023, 79, 5615–5642. [Google Scholar] [CrossRef]
- Wandell, R.; Hossain, S.; Hussain, I. A cost-effective Wi-Fi-based indoor positioning system for mobile phones. Wirel. Netw. 2023, 29, 2845–2862. [Google Scholar] [CrossRef]
- Rayavarapu, V.; Mahapatro, A. MOANS DV-Hop: An anchor node subset based localization algorithm for wireless sensor networks. Ad Hoc Networks 2024, 152, 103323. [Google Scholar] [CrossRef]
- Subhan, F.; Ahmed, S.; Ashraf, K.; Zhang, X. Extended Gradient Predictor and Filter for smoothing RSSI. In Proceedings of the 16th International Conference on Advanced Communication Technology, Pyeongchang, Republic of Korea, 16–19 February 2014; pp. 1198–1202. [Google Scholar] [CrossRef]
- Kumar, V.; Arablouei, R.; de Hoog, F.; Jurdak, R.; Kusy, B.; Bergmann, N.W. Pseudo-linear localization using perturbed RSSI measurements and inaccurate anchor positions. Pervasive Mob. Comput. 2019, 52, 46–59. [Google Scholar] [CrossRef]
- Ayabakan, T.; Kerestecioglu, F. RSSI-Based Indoor Positioning via Adaptive Federated Kalman Filter. IEEE Sensors J. 2022, 22, 5302–5308. [Google Scholar] [CrossRef]
- Ibnatta, Y.; Khaldoun, M.; Sadik, M. Indoor Localization System Based on Mobile Access Point Model MAPM Using RSS with UWB-OFDM. IEEE Access 2022, 10, 46043–46056. [Google Scholar] [CrossRef]
- Gu, T.; Tang, Y.; Wang, Z.; Lan, R.; Zhong, Y.; Chang, L. The Indoor Positioning Fusion Algorithm of Multi-source and Heterogeneous. In Proceedings of the 2018 7th International Conference on Digital Home (ICDH), Guilin, China, 30 November–1 December 2018; pp. 294–299. [Google Scholar] [CrossRef]
- Varma, P.S.; Anand, V. ReMAPP: Reverse multilateration based access point positioning using multivariate regression for indoor localization in smart buildings. Telecommun. Syst. 2023, 83, 303–322. [Google Scholar] [CrossRef]
- Huang, J.; Junginger, S.; Liu, H.; Thurow, K. Indoor Positioning Systems of Mobile Robots: A Review. Robotics 2023, 12, 47. [Google Scholar] [CrossRef]
- Kavetha, S.; Ja’Afar, A.S.; Aziz, M.Z.A.; Isa, A.A.M.; Johal, M.S.; Hashim, N.M.Z. Development of location estimation algorithm utilizing rssi for lora positioning system. J. Teknol. Sci. Eng. 2019, 84, 97–105. [Google Scholar] [CrossRef]
- Damayanti, T.N.; Ramadan, D.N.; Utami, I.M. MyLib: Smart Library Indoor Navigation Using Bluetooth Low Energy with Triangulation Method. Int. J. Electron. Telecommun. 2022, 68, 293–298. [Google Scholar] [CrossRef]
- Yaro, A.S.; Maly, F.; Prazak, P. A Survey of the Performance-Limiting Factors of a 2-Dimensional RSS Fingerprinting-Based Indoor Wireless Localization System. Sensors 2023, 23, 2545. [Google Scholar] [CrossRef]
- Kim, J. Suppression of NLOS errors in TDOA-AOA hybrid localization. Wirel. Netw. 2023, 29, 657–667. [Google Scholar] [CrossRef]
- Lee, S.-H.; Kim, W.-Y.; Seo, D.-H. Automatic self-reconstruction model for radio map in Wi-Fi fingerprinting. Expert Syst. Appl. 2022, 192, 116455. [Google Scholar] [CrossRef]
- Bilodeau, J.-S.; Bouzouane, A.; Bouchard, B.; Gaboury, S. An experimental comparative study of RSSI-based positioning algorithms for passive RFID localization in smart environments. J. Ambient Intell. Humaniz. Comput. 2018, 9, 1327–1343. [Google Scholar] [CrossRef]
- Shin, B.; Lee, J.H.; Yu, C.; Kyung, H.; Lee, T. Simultaneous Localization and Mapping for Pedestrians using Radio Frequency Signals. IEEE Sensors J. 2022, 22, 13497–13507. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, S.; Wang, C.; Sun, S. Regional Double-Layer, High-Precision Indoor Positioning System Based on iBeacon Network. Math. Probl. Eng. 2022, 2022, 8673083. [Google Scholar] [CrossRef]
- Yu, M.; Yao, S.; Wu, X.; Chen, L. Research on a Wi-Fi RSSI Calibration Algorithm Based on WOA-BPNN for Indoor Positioning. Appl. Sci. 2022, 12, 7151. [Google Scholar] [CrossRef]
- Naghdi, S.; O’keefe, K. Combining Multichannel RSSI and Vision with Artificial Neural Networks to Improve BLE Trilateration. Sensors 2022, 22, 4320. [Google Scholar] [CrossRef]
- Ozdemir, B.N.; Ceylan, A. Constructing a precise radio map and application of indoor positioning with dual-frequency Wi-Fi fingerprinting method. Measurement 2020, 163, 107997. [Google Scholar] [CrossRef]
- Simka, M.; Polak, L. On the RSSI-Based Indoor Localization Employing LoRa in the 2.4 GHz ISM Band. Radioengineering 2022, 31, 135–143. [Google Scholar] [CrossRef]
- Harsh, A.; Navyata, S.; Vivek, R.; Kris, K. DeepBLE: Generalizing RSSI-based localization across different devices. arXiv 2021. [Google Scholar] [CrossRef]
- Haznedar, Y.; Aydin, G.Z.G.; Turgut, Z. Hybrid indoor positioning for smart homes using WiFi and Bluetooth low energy technologies. J. Ambient Intell. Smart Environ. 2023, 15, 63–87. [Google Scholar] [CrossRef]
- Tian, Z.; Xiao, Z.; Huang, Y. Multi-Source Fusion Localization Technology Based on Convolutional Neural Networks. In Proceedings of the 2022 14th International Conference on Wireless Communications and Signal Processing (WCSP), Nanjing, China, 1–3 November 2022; pp. 1081–1085. [Google Scholar] [CrossRef]
- Zhou, C.; Yuan, J.; Liu, H.; Qiu, J. Bluetooth Indoor Positioning Based on RSSI and Kalman Filter. Wirel. Pers. Commun. 2017, 96, 4115–4130. [Google Scholar] [CrossRef]
- Yang, J.; Feng, Z.; Ma, X.; Zhang, X. Indoor Positioning Method Based on Wireless Signal. iJOE Int. J. Online Eng. 2018, 14, 53–67. [Google Scholar] [CrossRef]
- Zaidi, M.; Bouazzi, I.; Usman, M.; Shamim, M.Z.M.; Singh, N.; Gunjan, V.K. Cooperative Scheme ToA-RSSI and Variable Anchor Positions for Sensors Localization in 2D Environments. Complexity 2022, 2022, 5069254. [Google Scholar] [CrossRef]
- Avilés-Viñas, J.; Carrasco-Alvarez, R.; Vázquez-Castillo, J.; Ortegón-Aguilar, J.; Estrada-López, J.J.; Jensen, D.D.; Peón-Escalante, R.; Castillo-Atoche, A. An Accurate UAV Ground Landing Station System Based on BLE-RSSI and Maximum Likelihood Target Position Estimation. Appl. Sci. 2022, 12, 6618. [Google Scholar] [CrossRef]
- Lin, H.; Purmehdi, H.; Fei, X.; Zhao, Y.; Isac, A.; Louafi, H.; Peng, W. Two-stage clustering for improve indoor positioning accuracy. Autom. Constr. 2023, 154, 104981. [Google Scholar] [CrossRef]
- Pérez-Navarro, A.; Montoliu, R.; Sansano-Sansano, E.; Martínez-Garcia, M.; Femenía, R.; Torres-Sospedra, J. Accuracy of a Single Position Estimate for kNN-Based Fingerprinting Indoor Positioning Applying Error Propagation Theory. IEEE Sensors J. 2023, 23, 18765–18775. [Google Scholar] [CrossRef]
- Ebaid, E.; Navaie, K. Optimum NN Algorithms Parameters on the UJIIndoorLoc for Wi-Fi Fingerprinting Indoor Positioning Systems. In Proceedings of the 2022 32nd International Telecommunication Networks and Applications Conference (ITNAC), Wellington, New Zealand, 30 November–2 December 2022; pp. 280–286. [Google Scholar] [CrossRef]
- Li, H.; Qian, Z.; Liu, G.; Wang, X. NQRELoc: AP Selection via Nonuniform Quantization RSSI Entropy for Indoor Localization. IEEE Sensors J. 2022, 22, 9724–9732. [Google Scholar] [CrossRef]
- Zhou, R.; Meng, F.; Zhou, J.; Teng, J. A Wi-Fi Indoor Positioning Method Based on an Integration of EMDT and WKNN. Sensors 2022, 22, 5411. [Google Scholar] [CrossRef]
- Huang, Y.; Ye, R.; Yan, B.; Zhang, C.; Zhou, X. QSFDEW: A fingerprint positioning method based on quadtree search and fractal direction entropy weighting. Wirel. Netw. 2023, 29, 437–448. [Google Scholar] [CrossRef]
- Pinto, B.; Barreto, R.; Souto, E.; Oliveira, H. Robust RSSI-Based Indoor Positioning System Using K-Means Clustering and Bayesian Estimation. IEEE Sensors J. 2021, 21, 24462–24470. [Google Scholar] [CrossRef]
- Wang, T.; Han, L.; Kong, Q.; Li, Z.; Li, C.; Han, J.; Bai, Q.; Chen, Y. An improved particle filter indoor fusion positioning approach based on Wi-Fi/PDR/geomagnetic field. Def. Technol. 2023, in press. [Google Scholar] [CrossRef]
- Mehrabian, H.; Ravanmehr, R. Sensor fusion for indoor positioning system through improved RSSI and PDR methods. Futur. Gener. Comput. Syst. 2023, 138, 254–269. [Google Scholar] [CrossRef]
- Li, M.; Zhu, R.; Ding, Q.; Wang, J.; Wan, S.; Ma, M. Edge computing-enabled green multisource fusion indoor positioning algorithm based on adaptive particle filter. Clust. Comput. J. Netw. Softw. Tools Appl. 2022, 26, 667–684. [Google Scholar] [CrossRef]
- Choi, J.; Lee, G.; Choi, S.; Bahk, S. Smartphone Based Indoor Path Estimation and Localization Without Human Intervention. IEEE Trans. Mob. Comput. 2022, 21, 681–695. [Google Scholar] [CrossRef]
- Li, Z.; Zhang, Y. Constrained ESKF for UAV Positioning in Indoor Corridor Environment Based on IMU and WiFi. Sensors 2022, 22, 391. [Google Scholar] [CrossRef]
- Labinghisa, B.A.; Lee, D.M. Indoor localization system using deep learning based scene recognition. Multimedia Tools Appl. 2022, 81, 28405–28429. [Google Scholar] [CrossRef]
- Bellavista-Parent, V.; Torres-Sospedra, J.; Perez-Navarro, A. New trends in indoor positioning based on WiFi and machine learning: A systematic review. In Proceedings of the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021. [Google Scholar] [CrossRef]
- Fei, R.; Guo, Y.; Li, J.; Hu, B.; Yang, L. An Improved BPNN Method Based on Probability Density for Indoor Location. IEICE Trans. Inf. Syst. 2023, E106.D, 773–785. [Google Scholar] [CrossRef]
- Wu, S.; Huang, W.; Li, M.; Xu, K. A Novel RSSI Fingerprint Positioning Method Based on Virtual AP and Convolutional Neural Network. IEEE Sensors J. 2022, 22, 6898–6909. [Google Scholar] [CrossRef]
- Lin, Y.; Yu, K.; Hao, L.; Wang, J.; Bu, J. An Indoor Wi-Fi Localization Algorithm Using Ranging Model Constructed with Transformed RSSI and BP Neural Network. IEEE Trans. Commun. 2022, 70, 2163–2177. [Google Scholar] [CrossRef]
- Wang, W.; Zhu, Q.; Wang, Z.; Zhao, X.; Yang, Y. Research on Indoor Positioning Algorithm Based on SAGA-BP Neural Network. IEEE Sensors J. 2022, 22, 3736–3744. [Google Scholar] [CrossRef]
- Kotrotsios, K.; Fanariotis, A.; Leligou, H.-C.; Orphanoudakis, T. Design Space Exploration of a Multi-Model AI-Based Indoor Localization System. Sensors 2022, 22, 570. [Google Scholar] [CrossRef]
- Varma, P.S.; Anand, V. Fault-Tolerant indoor localization based on speed conscious recurrent neural network using Kullback–Leibler divergence. Peer-to-Peer Netw. Appl. 2022, 15, 1370–1384. [Google Scholar] [CrossRef]
- Ingabire, W.; Larijani, H.; Gibson, R.M.; Qureshi, A.-U. LoRaWAN Based Indoor Localization Using Random Neural Networks. Information 2022, 13, 303. [Google Scholar] [CrossRef]
- Sarcevic, P.; Csik, D.; Odry, A. Indoor 2D Positioning Method for Mobile Robots Based on the Fusion of RSSI and Magnetometer Fingerprints. Sensors 2023, 23, 1855. [Google Scholar] [CrossRef]
- Long, Q.; Zhang, J.; Cao, L.; Wang, W. Indoor Visible Light Positioning System Based on Point Classification Using Artificial Intelligence Algorithms. Sensors 2023, 23, 5224. [Google Scholar] [CrossRef]
- Ge, G.; Qin, Z.; Chen, X. Integrating WSN and Laser SLAM for Mobile Robot Indoor Localization. Comput. Mater. Contin. 2023, 74, 6351–6369. [Google Scholar] [CrossRef]
- Ge, G.; Li, J.; Qin, Z. Mobile Robot Localization in Geometrically Similar Environment Combining Wi-Fi with Laser SLAM. KSII Trans. Internet Inf. Syst. 2023, 17, 1339–1355. [Google Scholar] [CrossRef]
- Jin, Z.; Li, Y.; Yang, Z.; Zhang, Y.; Cheng, Z. Real-Time Indoor Positioning Based on BLE Beacons and Pedestrian Dead Reckoning for Smartphones. Appl. Sci. 2023, 13, 4415. [Google Scholar] [CrossRef]
- Nurpeiissov, M.; Kuzdeuov, A.; Assylkhanov, A.; Khassanov, Y.; Varol, H.A. End-to-End Sequential Indoor Localization Using Smartphone Inertial Sensors and WiFi. In Proceedings of the 2022 IEEE/SICE International Symposium on System Integration (SII), Narvik, Norway, 9–12 January 2022; pp. 566–571. [Google Scholar] [CrossRef]
- Mihara, S.; Murakami, T.; Yamaguchi, A.; Shinbo, H. User Equipment Tracking for a Millimeter Wave System Using Vision and RSSI. IEEE Open J. Commun. Soc. 2022, 3, 1563–1577. [Google Scholar] [CrossRef]
- Chong, A.-M.; Yeo, B.-C.; Lim, W.-S. Integration of UWB RSS to Wi-Fi RSS fingerprinting-based indoor positioning system. Cogent Eng. 2022, 9, 2087364. [Google Scholar] [CrossRef]
- Talla-Chumpitaz, R.; Castillo-Cara, M.; Orozco-Barbosa, L.; García-Castro, R. A novel deep learning approach using blurring image techniques for Bluetooth-based indoor localisation. Inf. Fusion 2023, 91, 173–186. [Google Scholar] [CrossRef]
- Lee, K.; Nam, Y.; Min, S.D. An indoor localization solution using Bluetooth RSSI and multiple sensors on a smartphone. Multimedia Tools Appl. 2018, 77, 12635–12654. [Google Scholar] [CrossRef]
- Scavino, E.; Rahman, M.A.A.; Farid, Z. An Improved Hybrid Indoor Positioning Algorithm via QPSO and MLP Signal Weighting. Comput. Mater. Contin. 2023, 74, 379–397. [Google Scholar] [CrossRef]
- Kawecki, R.; Hausman, S.; Korbel, P. Performance of Fingerprinting-Based Indoor Positioning with Measured and Simulated RSSI Reference Maps. Remote Sens. 2022, 14, 1992. [Google Scholar] [CrossRef]
- Yang, Y.; Dai, P.; Huang, H.; Wang, M.; Kuang, Y. A Semi-Simulated RSS Fingerprint Construction for Indoor Wi-Fi Positioning. Electronics 2020, 9, 1568. [Google Scholar] [CrossRef]
- Sulaiman, B.; Tarapiah, S.; Natsheh, E.; Atalla, S.; Mansoor, W.; Himeur, Y. Radio map generation approaches for an RSSI-based indoor positioning system. Syst. Soft Comput. 2023, 5, 200054. [Google Scholar] [CrossRef]
- Gong, X.; Liu, J.; Yang, S.; Gu, F.; Huang, G.; Bai, Y. An Enhanced Indoor Positioning Solution Using Dynamic Radio Fingerprinting Spatial Context Recognition. IEEE Internet Things J. 2023, 10, 1297–1309. [Google Scholar] [CrossRef]
- Qian, J.; Song, M. Research and Application of Underground WLAN Adaptive Radio Fingerprint Database. Sensors 2020, 20, 1182. [Google Scholar] [CrossRef]
- Yoo, J. Change Detection of RSSI Fingerprint Pattern for Indoor Positioning System. IEEE Sensors J. 2020, 20, 2608–2615. [Google Scholar] [CrossRef]
- Sulaiman, B.; Natsheh, E.; Tarapiah, S. Towards a better indoor positioning system: A location estimation process using artificial neural networks based on a semi-interpolated database. Pervasive Mob. Comput. 2022, 81, 101548. [Google Scholar] [CrossRef]
- Klus, L.; Quezada-Gaibor, D.; Torres-Sospedra, J.; Lohan, E.S.; Granell, C.; Nurmi, J. Towards Accelerated Localization Performance Across Indoor Positioning Datasets. In Proceedings of the 2022 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 7–9 June 2022. [Google Scholar] [CrossRef]
- Torres-Sospedra, J.; Montoliu, R.; Martinez-Uso, A.; Avariento, J.P.; Arnau, T.J.; Benedito-Bordonau, M.; Huerta, J. UJIIndoorLoc: A new multi-building and multi-floor database for WLAN fingerprint-based indoor localization problems. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Republic of Korea, 27–30 October 2014. [Google Scholar] [CrossRef]
- Hisham, A.N.N.; Ng, Y.H.; Tan, C.K.; Chieng, D. Hybrid Wi-Fi and BLE Fingerprinting Dataset for Multi-Floor Indoor Environments with Different Layouts. Data 2022, 7, 156. [Google Scholar] [CrossRef]
- Abdullah, A.; Haris, M.; Aziz, O.A.; Rashid, R.A.; Abdullah, A.S. UTMInDualSymFi: A Dual-Band Wi-Fi Dataset for Fingerprinting Positioning in Symmetric Indoor Environments. Data 2023, 8, 14. [Google Scholar] [CrossRef]
- Luckner, M.; Sowik, S.; Brida, P. Selection of Signal Sources Influence at Indoor Positioning System. IEEE Trans. Wirel. Commun. 2024, 23, 45–57. [Google Scholar] [CrossRef]
- Mohammadi, M.; Al-Fuqaha, A.; Guizani, M. Semi-supervised Deep Reinforcement Learning in Support of IoT and Smart City Services. IEEE Internet Things J. 2018, 5, 624–635. [Google Scholar] [CrossRef]
- Eltohamy, A.; Korb, M.; Zetik, R.; Thomä, R.S. Optimum Access-Point Constellation for Indoor Time Difference of Arrival Positioning. In Proceedings of the 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 24–27 April 2023; pp. 1234–1240. [Google Scholar] [CrossRef]
- Luo, Q.; Yan, X.; Li, J.; Peng, Y.; Tang, Y.; Wang, J.; Wang, D. DEDF: Lightweight WSN distance estimation using RSSI data distribution-based fingerprinting. Neural Comput. Appl. 2016, 27, 1567–1575. [Google Scholar] [CrossRef]
- Chen, H.-C.; Lin, R.-S.; Huang, C.-J.; Tian, L.; Su, X.; Yu, H. Bluetooth-controlled Parking System Based on WiFi Positioning Technology. Sensors Mater. 2022, 34, 1179–1189. [Google Scholar] [CrossRef]
- Yang, J.; Deng, S.; Xu, L.; Zhang, W. Calibration-Free 3D Indoor Positioning Algorithms Based on DNN and DIFF. Sensors 2022, 22, 5891. [Google Scholar] [CrossRef]
- Leitch, S.G.; Bin Abbas, W.; Ahmed, Q.Z.; Hafeez, M.; Lazaridis, P.I. Different Indoor Localisation Techniques using Smartphones. In Proceedings of the 2022 25th International Symposium on Wireless Personal Multimedia Communications (WPMC), Herning, Denmark, 30 October–2 November 2022; pp. 505–509. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. Number | Method | RSSI Data Source | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RSSI Data Acquisition Device | Fusion Method | |||||||||||
| Wi-Fi | BLE | ZigBee | Other | UWB | IMU | Image | LIDAR | Visible Light | Magnetometer | Barometric Pressure | ||
| Ref. [69] | √ | √ | Truth | |||||||||
| Ref. [70] | √ | Simulation | ||||||||||
| Ref. [71] | √ | √ | √ | Truth | ||||||||
| Ref. [72] | √ | √ | Truth | |||||||||
| Ref. [73] | √ | √ | Truth | |||||||||
| Ref. [74] | √ | √ | Truth | |||||||||
| Ref. [75] | √ | √ | Truth | |||||||||
| Ref. [76] | √ | √ | Truth | |||||||||
| Ref. [77] | √ | √ | Truth | |||||||||
| Ref. [78] | √ | √ | √ | Truth | ||||||||
| Sequence Number | Source | Address |
|---|---|---|
| 1 | Ref. [88] | http://www.geotec.uji.es/ujiindoorloc-database/ |
| 2 | Ref. [89] | https://doi.org/10.5281/zenodo.7306455 |
| 3 | Ref. [90] | https://doi.org/10.5281/zenodo.7260097 |
| 4 | Ref. [91] | https://github.com/mluckner/RSSI-Dataset-for-Indoor-Localization-Fingerprinting |
| 5 | Ref. [92] | https://www.kaggle.com/datasets/mehdimka/ble-rssi-dataset |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Ma, J.; Zhang, L.; Zhou, J.; Fan, J.; Lan, H. Research Progress of Wireless Positioning Methods Based on RSSI. Electronics 2024, 13, 360. https://doi.org/10.3390/electronics13020360
Chen B, Ma J, Zhang L, Zhou J, Fan J, Lan H. Research Progress of Wireless Positioning Methods Based on RSSI. Electronics. 2024; 13(2):360. https://doi.org/10.3390/electronics13020360
Chicago/Turabian StyleChen, Bohang, Jun Ma, Lingfei Zhang, Jiacheng Zhou, Jinyu Fan, and Haiming Lan. 2024. "Research Progress of Wireless Positioning Methods Based on RSSI" Electronics 13, no. 2: 360. https://doi.org/10.3390/electronics13020360
APA StyleChen, B., Ma, J., Zhang, L., Zhou, J., Fan, J., & Lan, H. (2024). Research Progress of Wireless Positioning Methods Based on RSSI. Electronics, 13(2), 360. https://doi.org/10.3390/electronics13020360