
Digital Active EMI Filter for Smart Electronic Power Converters



Abstract
1. Introduction
- An algorithm that integrates an online adaptive optimization;
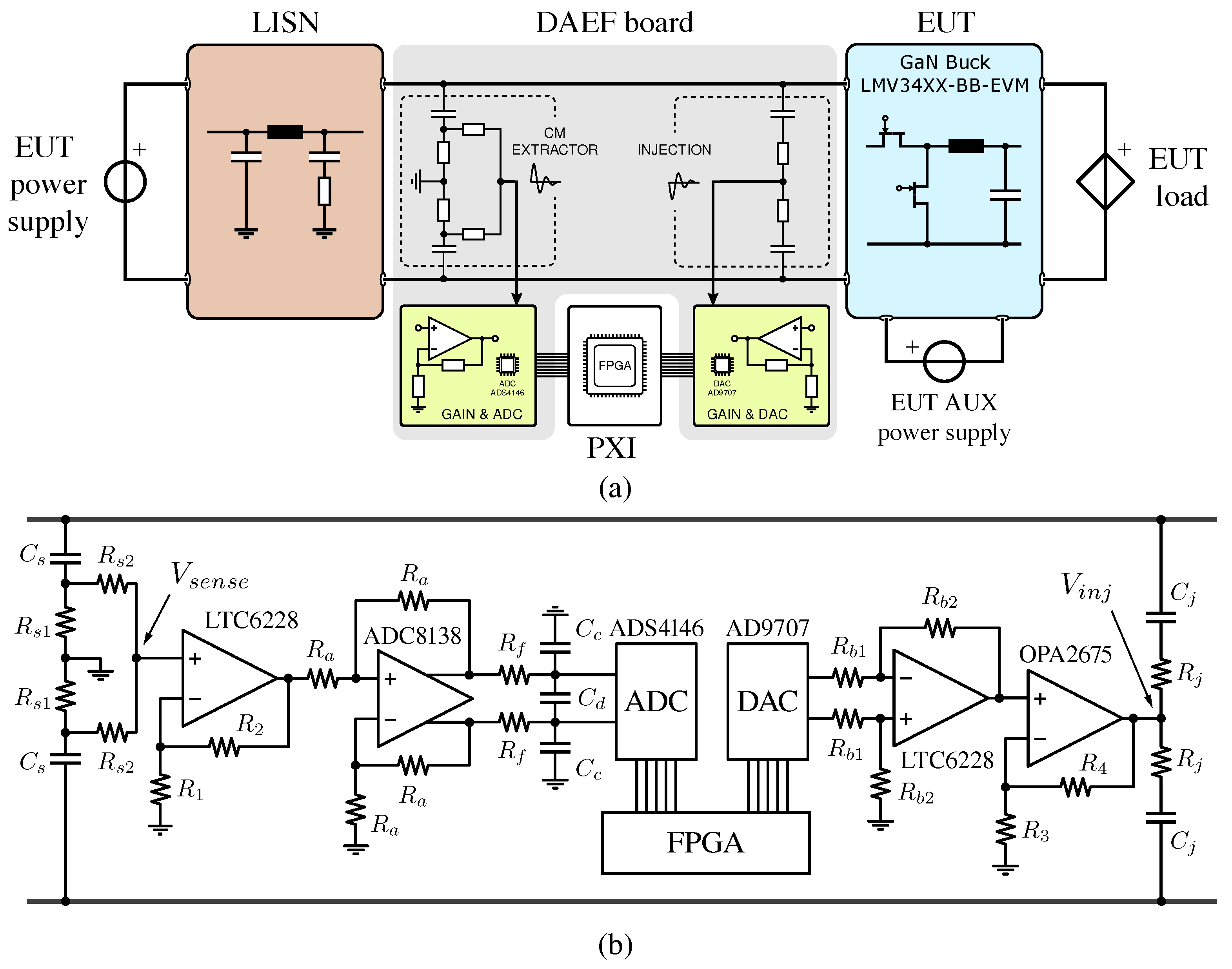
- A hardware solution to implement the DAEF in a single board, reporting the selected components for signal acquisition and injection;
- Discussions on perspectives for advanced features that can be supported by DAEFs embedded in smart electronic power converters.
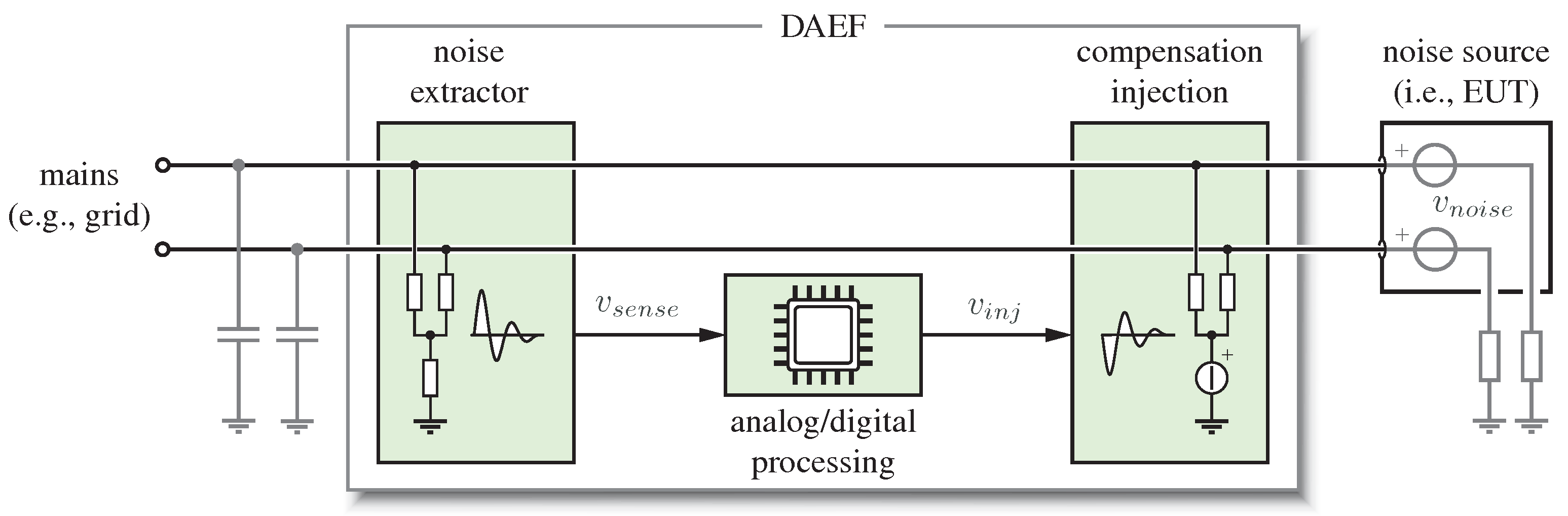
2. General Structure and Operating Principle of a DAEF
2.1. Fundamental Blocks
2.2. Operating Principle
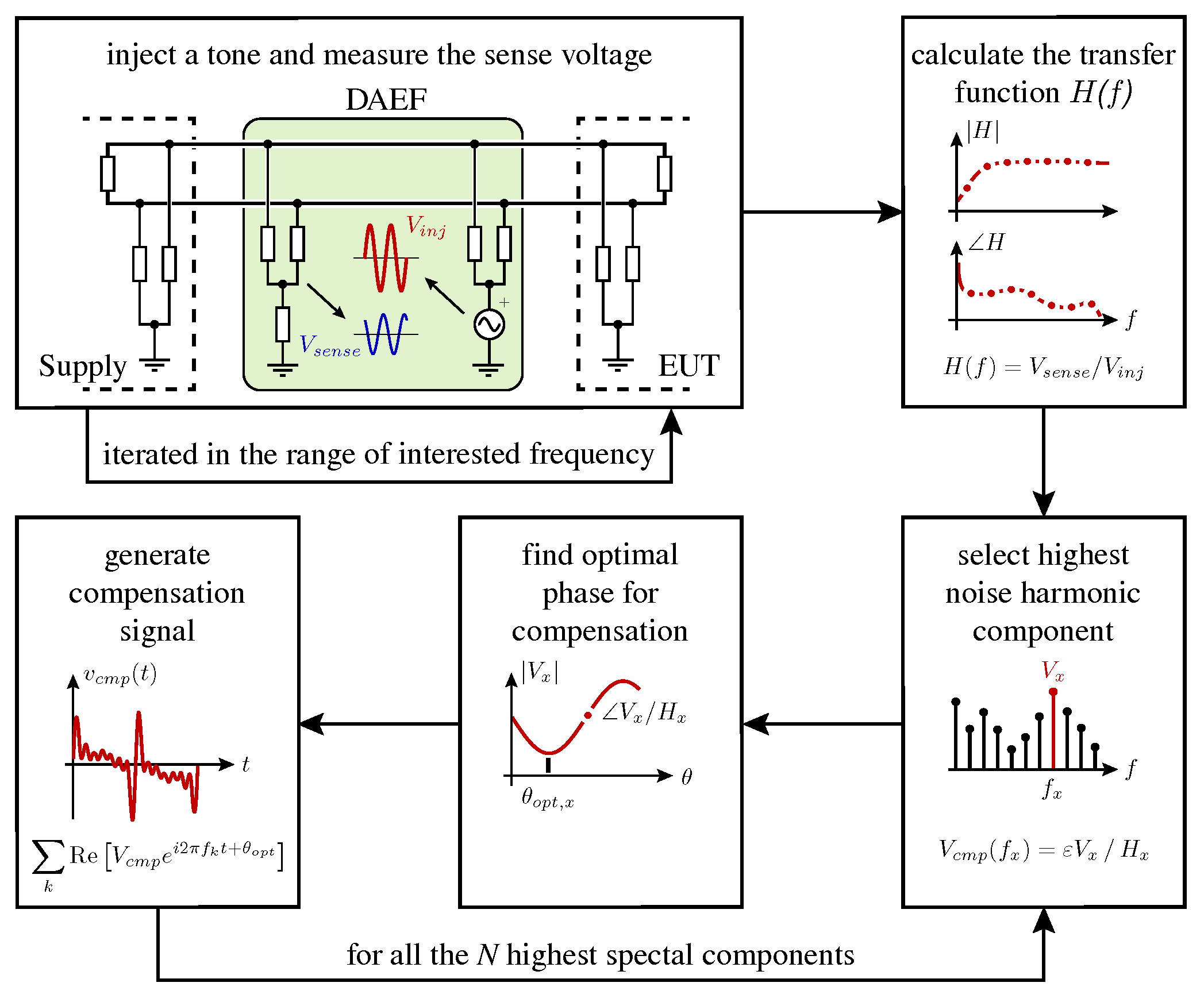
3. DAEF Control Algorithm
4. DAEF Implementation
5. Experimental Results
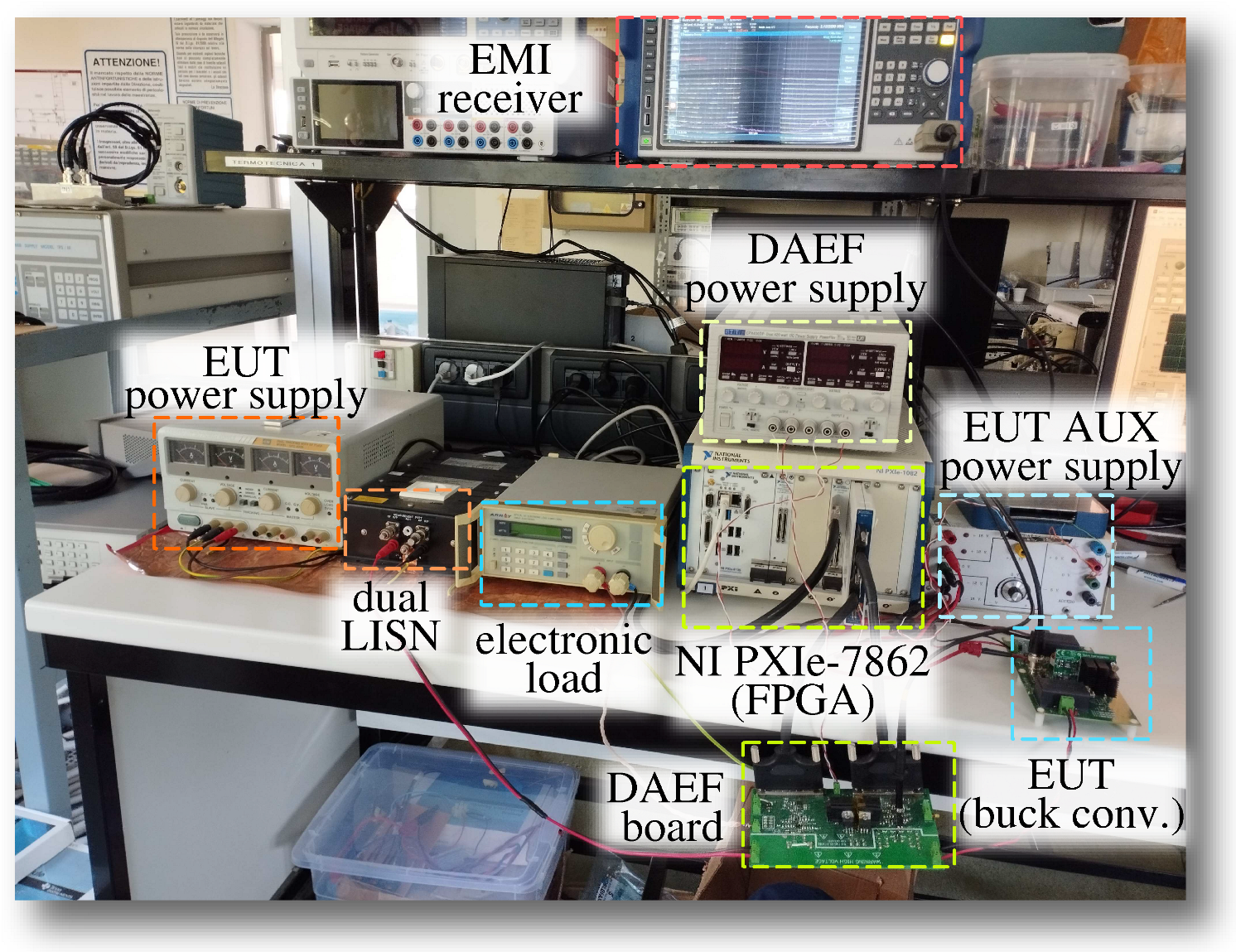
5.1. Experimental Testbench
5.2. Experimental Measurements
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| FFT | Fast Fourier transform |
| PE | Protective earth |
| CM | Common mode |
| DM | Differential mode |
| ADC | Analog-to-digital converter |
| DAC | Digital-to-analog converter |
| EMC | Electromagnetic compatibility |
| EMI | Electromagnetic interference |
| AEF | Active EMI filter |
| EUT | Equipment under test |
| DAEF | Digital active EMI filter |
| WBD | Wide-bandgap device |
References
- Gurpinar, E.; Castellazzi, A. Single-Phase T-Type Inverter Performance Benchmark Using Si IGBTs, SiC MOSFETs, and GaN HEMTs. IEEE Trans. Power Electron. 2016, 31, 7148–7160. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, S. A Survey of EMI Research in Power Electronics Systems with Wide-Bandgap Semiconductor Devices. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 626–643. [Google Scholar] [CrossRef]
- Dey, S.; Mallik, A.; Mishra, S. A Mathematical Design Approach to Volumetric Optimization of EMI Filter and Modeling of CM Noise Sources in a Three-Phase PFC. IEEE Trans. Power Electron. 2022, 37, 462–472. [Google Scholar] [CrossRef]
- Son, Y.C.; Sul, S.K. Generalization of active filters for EMI reduction and harmonics compensation. IEEE Trans. Ind. Appl. 2006, 42, 545–551. [Google Scholar] [CrossRef]
- Chen, W.; Yang, X.; Wang, Z. Analysis of Insertion Loss and Impedance Compatibility of Hybrid EMI Filter Based on Equivalent Circuit Model. IEEE Trans. Ind. Electron. 2007, 54, 2057–2064. [Google Scholar] [CrossRef]
- Jiang, S.; Liu, Y.; Liang, W.; Peng, J.; Jiang, H. Active EMI Filter Design with a Modified LCL-LC Filter for Single-Phase Grid-Connected Inverter in Vehicle-to-Grid Application. IEEE Trans. Veh. Technol. 2019, 68, 10639–10650. [Google Scholar] [CrossRef]
- Narayanasamy, B.; Luo, F.; Chu, Y. Modeling and Stability Analysis of Voltage Sensing based Differential Mode Active EMI Filters for AC-DC Power Converters. In Proceedings of the 2018 IEEE Symposium on Electromagnetic Compatibility, Signal Integrity and Power Integrity (EMC, SI & PI), Long Beach, CA, USA, 30 July–3 August 2018; pp. 322–328. [Google Scholar] [CrossRef]
- Bendicks, A.; Gerten, M.; Frei, S. Active Cancellation of Periodic CM EMI at the Input of a Motor Inverter by Injecting Synthesized and Synchronized Signals (S3-AEF). IEEE Trans. Power Electron. 2022, 37, 11951–11961. [Google Scholar] [CrossRef]
- Hamza, D.; Pahlevaninezhad, M.; Jain, P.K. Implementation of a Novel Digital Active EMI Technique in a DSP-Based DC–DC Digital Controller Used in Electric Vehicle (EV). IEEE Trans. Power Electron. 2013, 28, 3126–3137. [Google Scholar] [CrossRef]
- Ji, J.; Chen, W.; Yang, X. Arc welding inverter with embedded Digital Active EMI controller. In Proceedings of the 2016 IEEE Applied Power Electronics Conference and Exposition (APEC), Long Beach, CA, USA, 20–24 March 2016; pp. 493–498. [Google Scholar] [CrossRef]
- Liserre, M.; Beiranvand, H.; Leng, Y.; Zhu, R.; Hoeher, P.A. Overview of Talkative Power Conversion Technologies. IEEE Open J. Power Electron. 2023, 4, 67–80. [Google Scholar] [CrossRef]
- Leng, Y.; Zhu, R.; Liserre, M.; Hoeher, P.A. Variable Zero-Vector-Width-Based Three-Phase DC/AC Talkative Power Conversion. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 3402–3414. [Google Scholar] [CrossRef]
- Bendicks, A.; Dörlemann, T.; Frei, S.; Hees, N.; Wiegand, M. Active EMI Reduction of Stationary Clocked Systems by Adapted Harmonics Cancellation. IEEE Trans. Electromagn. Compat. 2019, 61, 998–1006. [Google Scholar] [CrossRef]
- TPSF12C1-Q1 Standalone; Active, EMI Filter for Common-Mode Noise Mitigation in Single-Phase, AC, Automotive Power Systems. Mouser Electronics: Mansfield, TX, USA, 2023.
- Zhou, Y.; Chen, W.; Yang, X.; Zhang, R.; Yan, R.; Liu, J.; Wang, H. A New Integrated Active EMI Filter Topology with Both CM Noise and DM Noise Attenuation. IEEE Trans. Power Electron. 2022, 37, 5466–5478. [Google Scholar] [CrossRef]
- Han, Y.; Wu, Z.; Wu, D. Hybrid Common-mode EMI Filter Design for Electric Vehicle Traction Inverters. Chin. J. Electr. Eng. 2022, 8, 52–60. [Google Scholar] [CrossRef]
- Douzi, S.; Tlig, M.; Slama, J.B.H.; Kadi, M. Simulation of conducted EMI in SiC MOSFET buck converters before and after aging. In Proceedings of the 2016 7th International Conference on Sciences of Electronics, Technologies of Information and Telecommunications (SETIT), Hammamet, Tunisia, 18–20 December 2016; pp. 171–176. [Google Scholar] [CrossRef]
- Mannan, T.I.; Amin, A.; Choi, S. Investigation of SiC MOSFET Aging Effects on Common-Mode EMI Emissions. In Proceedings of the 2023 IEEE Electric Ship Technologies Symposium (ESTS), Alexandria, VA, USA, 1–4 August 2023; pp. 477–483. [Google Scholar] [CrossRef]
- Douzi, S.; Tlig, M.; Slama, J.B.H. Experimental investigation on the evolution of a conducted-EMI buck converter after thermal aging tests of the MOSFET. Microelectron. Reliab. 2015, 55, 1391–1394. [Google Scholar] [CrossRef]
- Narayanasamy, B.; Luo, F. A Survey of Active EMI Filters for Conducted EMI Noise Reduction in Power Electronic Converters. IEEE Trans. Electromagn. Compat. 2019, 61, 2040–2049. [Google Scholar] [CrossRef]
- Jiang, L.; Wang, F.; Szolusha, K.; Mathews, K. A Practical Method for Separating Common-Mode and Differential-Mode Emissions in Conducted Emissions Testing. Analog. Dialogue 2021, 55, 1–4. [Google Scholar]
- Biancacci, N. FFT corrections for tune measurements. In Proceedings of the Optics Workshop, OMCM, Geneva, Switzerland, 20–22 June 2011. [Google Scholar]
- Texas Instruments Incorporated. Using the LMG3410-HB-EVM Half-Bridge and LMG34XX-BB-EVM Breakout Board EVM. In General TI High Voltage Evaluation User Safety Guidelines; Texas Instruments Incorporated: Dallas, TX, USA, 2016. [Google Scholar]
- Texas Instruments Incorporated. LMG341xR050 600-V 50-mΩ Integrated GaN Fet Power Stage with Overcurrent Protection; Texas Instruments Incorporated: Dallas, TX, USA, 2020. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filter Type | Max Attenuation | Features |
|---|---|---|
| AEF [15] | CM/DM reduction | |
| Hybrid [16] | Broadband suppression | |
| DAEF [8] | Flexibility, strong reduction |
| Component | Function |
|---|---|
| ADS4146 | Fast ADC used to sample the noise; 160 MS/s with 14-bit resolution. |
| AD9707 | Fast DAC with dual-current output; 175 MS/s with 14-bit resolution. |
| LTC6228 | Operational amplifier used to amplify the common mode. |
| AD8138 | Single-ended-to-differential driver. |
| OPA2675 | High-current-operation amplifier used to drive the injection circuit. |
| Symbol | Value | Symbol | Value | Symbol | Value |
|---|---|---|---|---|---|
| Freq. (MHz) | Freq. (MHz) | Freq. (MHz) | |||
|---|---|---|---|---|---|
| 1.171901 | 16 | 1.178127 | 19 | 1.289168 | 19 |
| 1.296017 | 20 | 1.527364 | 18 | 1.535478 | 13 |
| 1.644966 | 16 | 4.113723 | 12 | 4.360601 | 14 |
| 4.721303 | 13 | 4.822430 | 15 | 5.057958 | 18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Darisi, M.; Caldognetto, T.; Biadene, D.; Stellini, M. Digital Active EMI Filter for Smart Electronic Power Converters. Electronics 2024, 13, 3889. https://doi.org/10.3390/electronics13193889
Darisi M, Caldognetto T, Biadene D, Stellini M. Digital Active EMI Filter for Smart Electronic Power Converters. Electronics. 2024; 13(19):3889. https://doi.org/10.3390/electronics13193889
Chicago/Turabian StyleDarisi, Michele, Tommaso Caldognetto, Davide Biadene, and Marco Stellini. 2024. "Digital Active EMI Filter for Smart Electronic Power Converters" Electronics 13, no. 19: 3889. https://doi.org/10.3390/electronics13193889
APA StyleDarisi, M., Caldognetto, T., Biadene, D., & Stellini, M. (2024). Digital Active EMI Filter for Smart Electronic Power Converters. Electronics, 13(19), 3889. https://doi.org/10.3390/electronics13193889