

The Effect of Directional Tactile Memory of the Back of the User on Reaction Time and Accuracy




Abstract
1. Introduction
1.1. Feedback Setup in Autonomous Vehicles and Construction and Industrial Construction Sites
1.2. Tactile Memory Investigations
1.3. Studies Contributions
2. Experiment 1: Directional Tactile Memory
2.1. Method Experiment 1
2.1.1. Tools Experiment 1
2.1.2. Procedure Experiment 1
2.1.3. Study Variables
2.1.4. Data Analysis Experiment 1
2.1.5. Results Experiment 1
3. Experiment 2: Distractor Task
3.1. Method Experiment 2
3.1.1. Additional Tool
3.1.2. Experiment 2 Variables
3.1.3. Data Analysis Experiment 2
4. Results Comparison for Experiments 1 and 2
4.1. Reaction Time and Errors Comparison
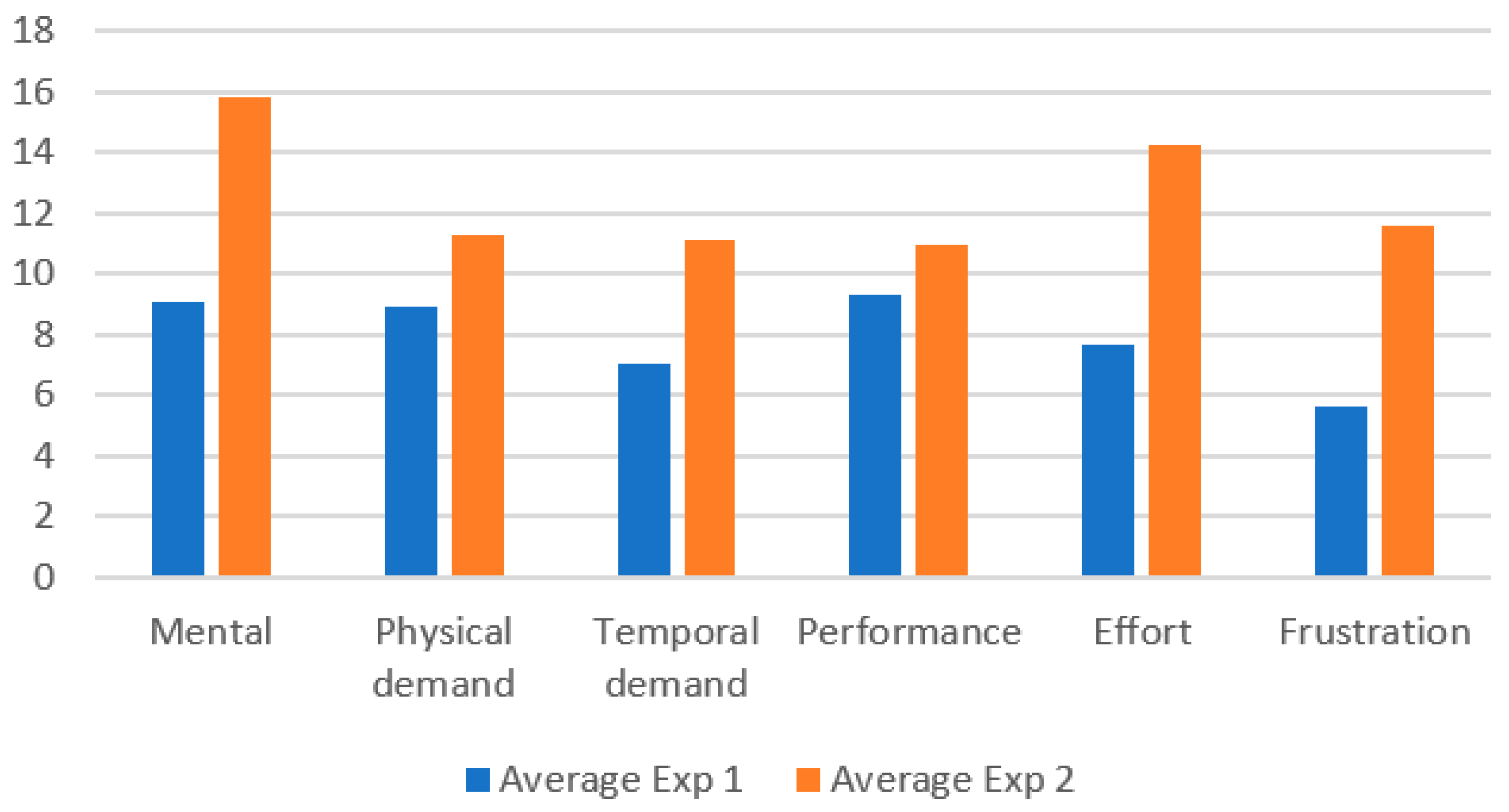
4.2. NASA TLX Comparison
5. Discussion
5.1. Theoretical Implication
5.2. Limitations and Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AOI | Area of Interest AOI |
| ART | Absolute Reaction |
| Time RT | Reaction Time |
References
- Friedrich, D.T.; Dürselen, L.; Mayer, B.; Hacker, S.; Schall, F.; Hahn, J.; Hoffmann, T.K.; Schuler, P.J.; Greve, J. Features of haptic and tactile feedback in TORS-a comparison of available surgical systems. J. Robot. Surg. 2018, 12, 103–108. [Google Scholar] [CrossRef] [PubMed]
- Gallace, A.; Spence, C. The cognitive and neural correlates of tactile memory. Psychol. Bull. 2009, 135, 380. [Google Scholar] [CrossRef]
- Eguchi, R.; Vacek, D.; Godzinski, C.; Okamura, A.M. Between-Tactor Display Using Dynamic Tactile Stimuli for Directional Cueing in Vibrating Environments. IEEE Trans. Haptics, 2023; early access. [Google Scholar] [CrossRef]
- Schroeter, R.; Steinberger, F. Pokémon DRIVE: Towards increased situational awareness in semi-automated driving. In Proceedings of the 28th Australian Conference on Computer-Human Interaction, Tasmania, Australia, 29 November–2 December 2016; pp. 25–29. [Google Scholar]
- Lutnyk, L.; Rudi, D.; Meier, E.; Kiefer, P.; Raubal, M. FlyBrate: Evaluating Vibrotactile Cues for Simulated Flight. Int. J. Hum. Comput. Interact. 2023, 39, 2374–2391. [Google Scholar] [CrossRef]
- Chaudary, B.; Pohjolainen, S.; Aziz, S.; Arhippainen, L.; Pulli, P. Teleguidance-based remote navigation assistance for visually impaired and blind people—Usability and user experience. Virtual Real. 2023, 27, 141–158. [Google Scholar] [CrossRef] [PubMed]
- Petermeijer, S.M.; Cieler, S.; De Winter, J.C. Comparing spatially static and dynamic vibrotactile take-over requests in the driver seat. Accid. Anal. Prev. 2017, 99, 218–227. [Google Scholar] [CrossRef] [PubMed]
- Salzer, Y.; Oron-Gilad, T.; Ronen, A.; Parmet, Y. Vibrotactile “on-thigh” alerting system in the cockpit. Hum. Factors 2011, 53, 118–131. [Google Scholar] [CrossRef] [PubMed]
- Schwalk, M.; Kalogerakis, N.; Maier, T. Driver support by a vibrotactile seat matrix—Recognition, adequacy and workload of tactile patterns in take-over scenarios during automated driving. Procedia Manuf. 2015, 3, 2466–2473. [Google Scholar] [CrossRef]
- Erp, V.; Jan, B.; Veltman, J.; van Veen, H.; Oving, A. Tactile Torso Display as Countermeasure to Reduce Night Vision Goggles Induced Drift; Defense Technical Information Center: Fort Belvoir, VA, USA, 2003.
- Fu, L.; Huang, H.; Berscheid, L.; Li, H.; Goldberg, K.; Chitta, S. Safe self-supervised learning in real of visuo-tactile feedback policies for industrial insertion. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 10380–10386. [Google Scholar]
- Palagi, M.; Santamato, G.; Chiaradia, D.; Gabardi, M.; Marcheschi, S.; Solazzi, M.; Frisoli, A.; Leonardis, D. A mechanical hand-tracking system with tactile feedback designed for telemanipulation. IEEE Trans. Haptics 2023, 16, 594–601. [Google Scholar] [CrossRef]
- Huang, Y.; Hammad, A.; Zhu, Z. Providing proximity alerts to workers on construction sites using Bluetooth Low Energy RTLS. Autom. Constr. 2021, 132, 103928. [Google Scholar] [CrossRef]
- Mahrer, P.; Miles, C. Recognition memory for tactile sequences. Memory 2002, 10, 7–20. [Google Scholar] [CrossRef] [PubMed]
- Miles, C. Tactile short-term memory revisited. Memory 1996, 4, 655–668. [Google Scholar] [CrossRef]
- Vo, D.B.; Brewster, S. Investigating the effect of tactile input and output locations for drivers’ hands on in-car tasks performance. In Proceedings of the 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Virtual, 21–22 September 2020; pp. 1–8. [Google Scholar]
- Roozendaal, J.; Johansson, E.; Winter, J.d.; Abbink, D.; Petermeijer, S. Haptic lane-keeping assistance for truck driving: A test track study. Hum. Factors 2020, 63, 1380–1395. [Google Scholar] [CrossRef] [PubMed]
- Williams, B.; Garton, A.E.; Headleand, C.J. Exploring Visuo-haptic Feedback Congruency in Virtual Reality. In Proceedings of the 2020 International Conference on Cyberworlds (CW), Caen, France, 29 September–1 October 2020; pp. 102–109. [Google Scholar]
- Di Campli San Vito, P.; Brewster, S.; Pollick, F.; Thompson, S.; Skrypchuk, L.; Mouzakitis, A. Purring Wheel: Thermal and Vibrotactile Notifications on the Steering Wheel. In Proceedings of the 2020 International Conference on Multimodal Interaction, Online, 25–29 October 2020; pp. 461–469. [Google Scholar]
- Caldwell, D.G.; Lawther, S.; Wardle, A. Multi-modal cutaneous tactile feedback. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, IROS’96, Osaka, Japan, 4–8 November 1996; Volume 2, pp. 465–472. [Google Scholar]
- Krüger, M.; Wiebel-Herboth, C.B.; Wersing, H. Tactile encoding of directions and temporal distances to safety hazards supports drivers in overtaking and intersection scenarios. Transp. Res. Part F Traffic Psychol. Behav. 2021, 81, 201–222. [Google Scholar] [CrossRef]
- Krüger, M.; Wiebel-Herboth, C.B.; Wersing, H. The Lateral Line: Augmenting Spatiotemporal Perception with a Tactile Interface. In Proceedings of the Augmented Humans International Conference, Kaiserslautern, Germany, 16–17 March 2020; pp. 1–10. [Google Scholar]
- Sasikumar, P. Haptic Contact in Immersive 360° Cinematic Environment. Master’s Thesis, University of Canterbury, Christchurch, New Zealand, 2018. [Google Scholar]
- Alotaibi, Y. The use of Electrotactile Feedback in Cars. In Proceedings of the 33rd International BCS Human Computer Interaction Conference 33, Newcastle, UK, 6–10 July 2020; pp. 51–54. [Google Scholar]
- Jung, J.; Lee, S.; Hong, J.; Youn, E.; Lee, G. Voice+ Tactile: Augmenting In-vehicle Voice User Interface with Tactile Touchpad Interaction. In Proceedings of the 2020 CHI Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–12. [Google Scholar]
- Hogan, F.R. Reactive Manipulation with Contact Models and Tactile Feedback. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2020. [Google Scholar]
- Zhu, Y.; Liu, W.; Zhu, D. Design Research on Vibration Tactile Feedback in Vehicle Navigation Information Application. In Proceedings of the Eighth International Workshop of Chinese CHI, Honolulu, HI, USA, 25–30 April 2020; pp. 47–56. [Google Scholar]
- Zhu, A.; Cao, S.; Yao, H.; Jadliwala, M.; He, J. Can Wearable Devices Facilitate a Driver’s Brake Response Time in a Classic Car-Following Task? IEEE Access 2020, 8, 40081–40087. [Google Scholar] [CrossRef]
- Shin, J.G.; Kim, S.H. Intelligibility of Haptic Signals in Vehicle Information Systems. Sensors 2021, 21, 4583. [Google Scholar] [CrossRef] [PubMed]
- Cooper, N.; Millela, F.; Cant, I.; White, M.D.; Meyer, G. Transfer of training—Virtual reality training with augmented multisensory cues improves user experience during training and task performance in the real world. PLoS ONE 2021, 16, e0248225. [Google Scholar] [CrossRef]
- Hölzl, R.; Steckhan, L.; Lehsing, C.; Savage, S.W.; Bowers, A.R. Driving with hemianopia VIII: Effects of a vibro-tactile assistance system on safety and gaze behavior in pedestrian crossing situations. Safety 2021, 7, 18. [Google Scholar] [CrossRef]
- Geitner, C.; Biondi, F.; Skrypchuk, L.; Jennings, P.; Birrell, S. The comparison of auditory, tactile, and multimodal warnings for the effective communication of unexpected events during an automated driving scenario. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 23–33. [Google Scholar] [CrossRef]
- Laßmann, P.; Othersen, I.; Fischer, M.S.; Reichelt, F.; Jenke, M.; Tüzün, G.J.; Bauerfeind, K.; Mührmann, L.; Maier, T. Driver’s Experience and Mode Awareness in between and during Transitions of different Levels of Car Automation. In Proceedings of the Human Factors and Ergonomics Society Europe Chapter 2019 Annual Conference, Nantes, France, 2–4 October 2019. [Google Scholar]
- Petermeijer, S.M.; De Winter, J.C.; Bengler, K.J. Vibrotactile displays: A survey with a view on highly automated driving. IEEE Trans. Intell. Transp. Syst. 2015, 17, 897–907. [Google Scholar] [CrossRef]
- Fellah, K.; Guiatni, M. Tactile display design for flight envelope protection and situational awareness. IEEE Trans. Haptics 2018, 12, 87–98. [Google Scholar] [CrossRef]
- Jones, L.A.; Sarter, N.B. Tactile displays: Guidance for their design and application. Hum. Factors 2008, 50, 90–111. [Google Scholar] [CrossRef] [PubMed]
- Alirezaee, P.; Weill-Duflos, A.; Schlesinger, J.J.; Cooperstock, J.R. Exploring the effectiveness of haptic alarm displays for critical care environments. In Proceedings of the 2020 IEEE Haptics Symposium (HAPTICS), Crystal City, VA, USA, 28–31 March 2020; pp. 948–954. [Google Scholar]
- Edet, U.; Mann, D.D. Evaluation of warning methods for remotely supervised autonomous agricultural machines. J. Agric. Saf. Health 2022, 28, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Horton, E.L.; Renganathan, R.; Toth, B.N.; Cohen, A.J.; Bajcsy, A.V.; Bateman, A.; Jennings, M.C.; Khattar, A.; Kuo, R.S.; Lee, F.A.; et al. A review of principles in design and usability testing of tactile technology for individuals with visual impairments. Assist. Technol. 2017, 29, 28–36. [Google Scholar] [CrossRef] [PubMed]
- Wall, S.; Brewster, S. Feeling what you hear: Tactile feedback for navigation of audio graphs. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Montréal, QC, Canada, 22–27 April 2006; pp. 1123–1132. [Google Scholar]
- Liu, G.; Yu, T.; Yu, C.; Xu, H.; Xu, S.; Yang, C.; Wang, F.; Mi, H.; Shi, Y. Tactile compass: Enabling visually impaired people to follow a path with continuous directional feedback. In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–13. [Google Scholar]
- Teizer, J.; Allread, B.S.; Fullerton, C.E.; Hinze, J. Autonomous pro-active real-time construction worker and equipment operator proximity safety alert system. Autom. Constr. 2010, 19, 630–640. [Google Scholar] [CrossRef]
- Gilson, E.Q.; Baddeley, A. Tactile short-term memory. Q. J. Exp. Psychol. 1969, 21, 180–184. [Google Scholar] [CrossRef] [PubMed]
- Lylykangas, J.; Surakka, V.; Salminen, K.; Farooq, A.; Raisamo, R. Responses to visual, tactile and visual–tactile forward collision warnings while gaze on and off the road. Transp. Res. Part F Traffic Psychol. Behav. 2016, 40, 68–77. [Google Scholar] [CrossRef]
- Scott, J.; Gray, R. A comparison of tactile, visual, and auditory warnings for rear-end collision prevention in simulated driving. Hum. Factors 2008, 50, 264–275. [Google Scholar] [CrossRef]
- Politis, I.; Brewster, S.; Pollick, F. Language-based multimodal displays for the handover of control in autonomous cars. In Proceedings of the 7th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Nottingham, UK, 1–3 September 2015; pp. 3–10. [Google Scholar]
- Calhoun, G.L.; Draper, M.H.; Guilfoos, B.J.; Ruff, H.A. Tactile and aural alerts in high auditory load UAV control environments. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Orlando, FL, USA, 26–30 September 2005; Sage Publications: Los Angeles, CA, USA, 2005; Volume 49, pp. 145–149. [Google Scholar]
- Wickens, C.D. Multiple resources and mental workload. Hum. Factors 2008, 50, 449–455. [Google Scholar] [CrossRef] [PubMed]
- Gilson, R.D.; Redden, E.S.; Elliott, L.R. Remote Tactile Displays for Future Soldiers; Technical Report; University of Central Florida: Orlando, FL, USA, 2007. [Google Scholar]
- Yadav, N.; Sadeghi, N.; Kang, J. Five factors affecting the on-body placement of wearable tactile safety promotion device for construction workers-on-foot. Constr. Innov. 2022, 24, 537–557. [Google Scholar] [CrossRef]
- Lim, S.; Yang, X. Real-time vibrotactile feedback system for reducing trunk flexion exposure during construction tasks. Appl. Ergon. 2023, 110, 104019. [Google Scholar] [CrossRef] [PubMed]
- Heinz, M.; Röcker, C. Feedback presentation for workers in industrial environments—Challenges and opportunities. In Proceedings of the Machine Learning and Knowledge Extraction: Second IFIP TC 5, TC 8/WG 8.4, 8.9, TC 12/WG 12.9 International Cross- Domain Conference, CD-MAKE 2018, Hamburg, Germany, 27–30 August 2018; Proceedings 2. Springer: Berlin/Heidelberg, Germany, 2018; pp. 248–261. [Google Scholar]
- Dekker, I.; Kellens, K.; Demeester, E. Design and Evaluation of an Intuitive Haptic Teleoperation Control System for 6-DoF Industrial Manipulators. Robotics 2023, 12, 54. [Google Scholar] [CrossRef]
- Piviotti, M. Providing Force and Vibrotactile Feedback with Haptic Devices for Simulating Industrial Tools in Immersive Virtual Reality. Ph.D. Thesis, Politecnico di Torino, Torino, Italy, 2021. [Google Scholar]
- Marsh, J.E.; Vachon, F.; Sörqvist, P.; Marsja, E.; Röer, J.P.; Richardson, B.H.; Ljungberg, J.K. Irrelevant changing-state vibrotactile stimuli disrupt verbal serial recall: Implications for theories of interference in short-term memory. J. Cogn. Psychol. 2024, 36, 78–100. [Google Scholar] [CrossRef]
- Erp, J.B.v.; Paul, K.I.; Mioch, T. Tactile working memory capacity of users who are blind in an electronic travel aid application with a vibration belt. ACM Trans. Access. Comput. (TACCESS) 2020, 13, 1–14. [Google Scholar] [CrossRef]
- Howard, M.; Sundareswara, R.; Daily, M.; Bhattacharyya, R.; Kaplan, S.; Mundhenk, N.; Lee, C.; Neely, H. Using tactile displays to maintain situational awareness during driving. In Proceedings of the 2013 IEEE International Multi-Disciplinary Conference on Cognitive Methods in Situation Awareness and Decision Support (CogSIMA), San Diego, CA, USA, 25–28 February 2013; pp. 228–237. [Google Scholar]
- Fitch, G.M.; Hankey, J.M.; Kleiner, B.M.; Dingus, T.A. Driver comprehension of multiple haptic seat alerts intended for use in an integrated collision avoidance system. Transp. Res. Part F Traffic Psychol. Behav. 2011, 14, 278–290. [Google Scholar] [CrossRef]
- Kim, J.; Shin, W. How to do random allocation (randomization). Clin. Orthop. Surg. 2014, 6, 103–109. [Google Scholar] [CrossRef] [PubMed]
- Faul, F.; Erdfelder, E.; Lang, A.G.; Buchner, A. G* Power 3: A flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behav. Res. Methods 2007, 39, 175–191. [Google Scholar] [CrossRef] [PubMed]
- Cohen, J. Statistical power analysis. Curr. Dir. Psychol. Sci. 1992, 1, 98–101. [Google Scholar] [CrossRef]
- Gawron, V.J. Human Performance, Workload, and Situational Awareness Measures Handbook; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- DeLucia, P.R.; Greenlee, E.T. Tactile vigilance is stressful and demanding. Hum. Factors 2022, 64, 732–745. [Google Scholar] [CrossRef] [PubMed]
- Guettaf, A. Understanding and Designing Tactile Feedback Interaction for Secondary Tasks. Ph.D. Thesis, Université Polytechnique Hauts-de-France, Valenciennes, France, 2022. [Google Scholar]
- Picard, D.; Monnier, C. Short-term memory for spatial configurations in the tactile modality: A comparison with vision. Memory 2009, 17, 789–801. [Google Scholar] [CrossRef]
- Hutmacher, F.; Kuhbandner, C. Long-term memory for haptically explored objects: Fidelity, durability, incidental encoding, and cross-modal transfer. Psychol. Sci. 2018, 29, 2031–2038. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment 1 (Time in between Directional Tactile Feedback and Action Cue) | Setting 1: Action Cue Visual | Setting 2: Action Cue Tactile |
|---|---|---|
| Group 1 (10 s) | Location: Tactile cue Action cue: Visual (54 trials) | Location: Tactile cue Action cue: Tactile (54 trials) |
| Group 2 (20 s) | Location: Tactile cue Action cue: Visual (54 trials) | Location: Tactile cue Action cue: Tactile (54 trials) |
| Independent Variables (IV) | Dependent Variables (DV) |
|---|---|
| Stimulus (visual or tactile) Time (10 s or 20 s) Trial (1 to 54) | Absolute Reaction Time (ART) Reaction time (RT) Error |
| Pearson Correlation | Stimulus | Time | Trial | Error | ART |
|---|---|---|---|---|---|
| Stimulus | 1 | ||||
| Time | −0.896 ** | ||||
| Trial | −0.116 ** | 0.097 ** | |||
| Error | 0.118 ** | −0.091 ** | −0.169 ** | ||
| ART | 0.066 ** | 0.075 ** | 0.817 ** | −0.060 * | |
| RT | 0.192 ** | −0.149 ** | −0.082 ** | 0.097 ** | −0.003 |
| Source | Dep Variable | Type III Sum of Sq. | df | Mean Sq. | F | Sig. | Partial Eta Sq. |
|---|---|---|---|---|---|---|---|
| Time | Error | 0.692 | 2 | 0.346 | 1.457 | 0.23 | 0.002 |
| ART | 3 × 1013 | 2 | 1.48 × 1013 | 529.4 | <0.001 | 0.4 | |
| RT | 1.2 × 108 | 2 | 61,723,689 | 2.335 | 0.097 | 0.003 | |
| Trial | Error | 28 | 57 | 0.49 | 2.07 | <0.001 | 0.07 |
| ART | 1.6 × 1014 | 57 | 2.7 × 1012 | 99.08 | 0 | 0.79 | |
| RT | 3.7 × 109 | 57 | 65,197,953 | 2.466 | <0.001 | 0.09 | |
| Time * Trial | Error | 22.6 | 106 | 6.59 × 1010 | 2.4 | 0.76 | 0.06 |
| ART | 7 × 1012 | 106 | 6.59 × 1010 | 2.36 | <0.001 | 0.15 | |
| RT | 3.7 × 109 | 106 | 34,989,947 | 1.32 | 0.018 | 0.087 |
| Setting 1: Visual | Setting 2: Tactile | |||
|---|---|---|---|---|
| Mean | STD | Mean | STD | |
| Error | 1.44 | 0.49 | 1.56 | 0.49 |
| ART | 647.5 | 367.2 | 699.6 | 417.3 |
| RT | 1.04 | 1.5 | 6.6 | 3.65 |
| Error | RT | |||
|---|---|---|---|---|
| Mean | STD | Mean | STD | |
| Experiment 1 | 1.49 | 0.5 | 1509.06 | 2289.98 |
| Experiment 2 | 1.78 | 0.42 | 2964.89 | 3546.82 |
| Shapiro–Wilk | Statistic | df | Sig. |
|---|---|---|---|
| Mental | 0.954 | 43 | 0.084 |
| Physical demand | 0.921 | 43 | 0.006 |
| Temporal demand | 0.913 | 43 | 0.003 |
| Performance | 0.955 | 43 | 0.089 |
| Effort | 0.963 | 43 | 0.178 |
| Frustration | 0.855 | 43 | <0.001 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Elshafei, A.; Romano, D.; Fahim, I.S. The Effect of Directional Tactile Memory of the Back of the User on Reaction Time and Accuracy. Electronics 2024, 13, 2482. https://doi.org/10.3390/electronics13132482
Elshafei A, Romano D, Fahim IS. The Effect of Directional Tactile Memory of the Back of the User on Reaction Time and Accuracy. Electronics. 2024; 13(13):2482. https://doi.org/10.3390/electronics13132482
Chicago/Turabian StyleElshafei, Ali, Daniela Romano, and Irene S. Fahim. 2024. "The Effect of Directional Tactile Memory of the Back of the User on Reaction Time and Accuracy" Electronics 13, no. 13: 2482. https://doi.org/10.3390/electronics13132482
APA StyleElshafei, A., Romano, D., & Fahim, I. S. (2024). The Effect of Directional Tactile Memory of the Back of the User on Reaction Time and Accuracy. Electronics, 13(13), 2482. https://doi.org/10.3390/electronics13132482