
Research on Control Strategy of PMSG-PWM Power Generation System with Tidal Energy

Abstract
1. Introduction
2. Main Circuit Topology and Mathematical Model
PMSG Mathematical Model
3. Design of the Dual Closed-Loop Controllers
3.1. Voltage Outer Loop Controller
3.1.1. Design of Sliding Mode Controller Based on Variable Exponential Convergence Law
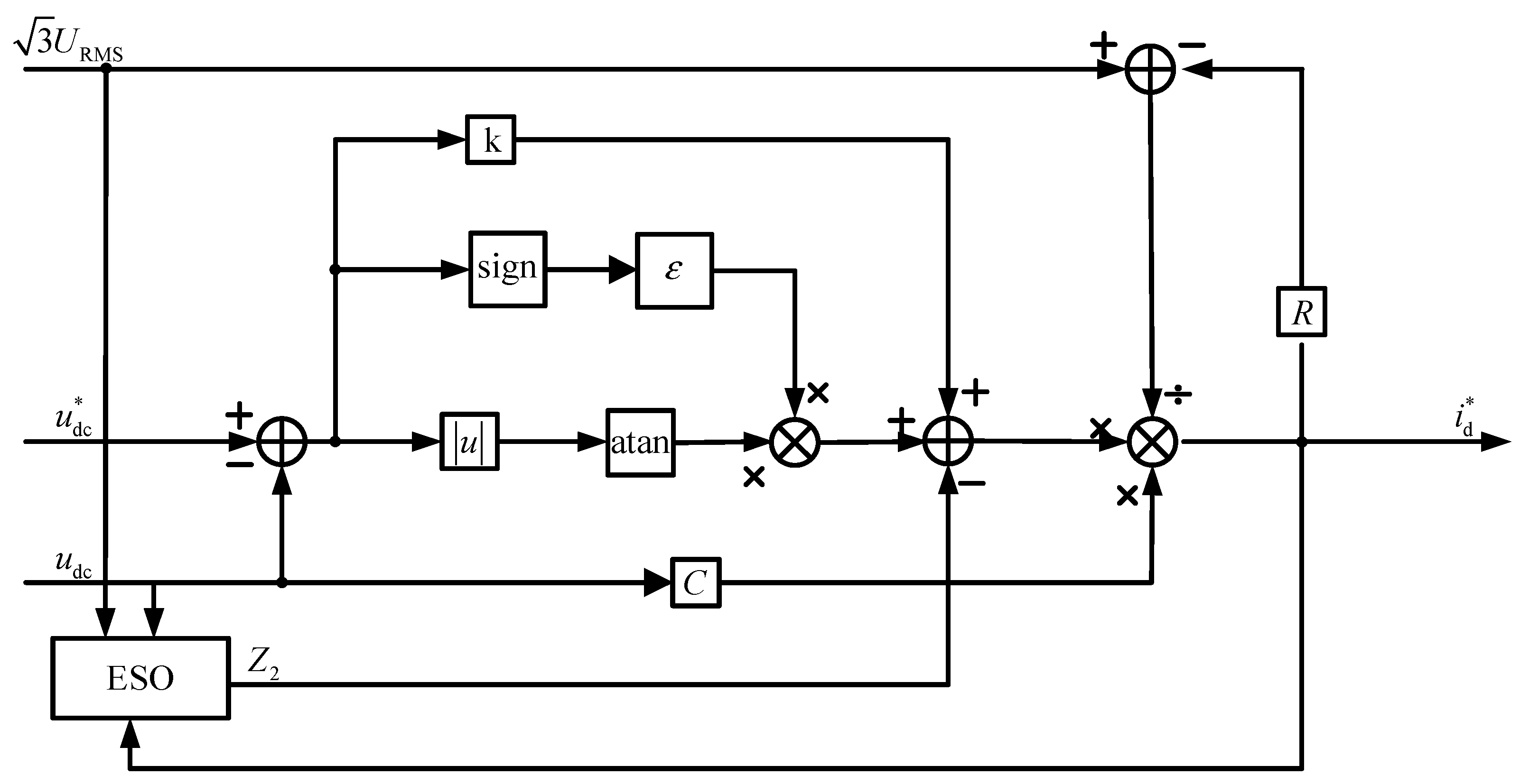
3.1.2. Sliding Mode Controller Design with the Introduction of ESO
3.2. Current Inner Loop Controller
4. Simulation and Experiment Verification
4.1. Simulation Verification
4.1.1. Under Rated Condition
4.1.2. PMSG Variable Operating Conditions
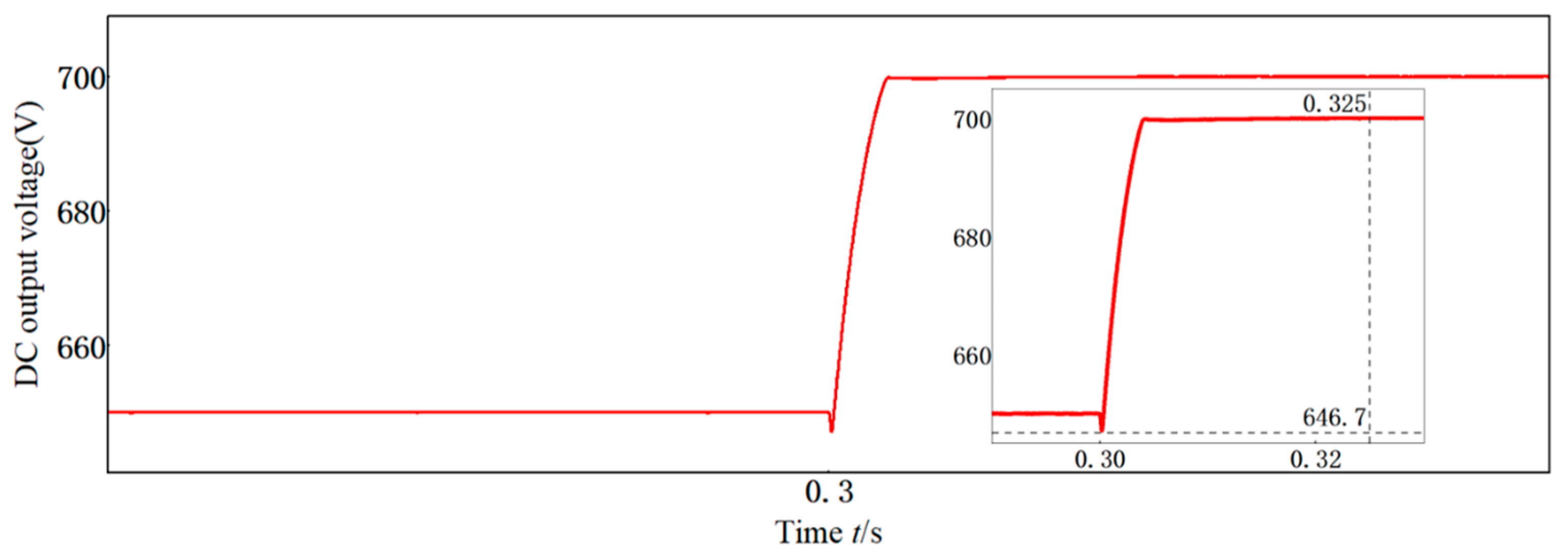
4.1.3. Given DC-Side Voltage Variation
4.2. Experiment Verification
4.2.1. Under Rated Condition
4.2.2. PMSG Variable Operating Conditions
4.2.3. Given DC-Side Voltage Variation
5. Conclusions
- (1)
- The voltage outer loop adopts the ESO-based variable exponential convergence law SMC, which can respond quickly in the wide-range output of PMSG. The DC output voltage overshoot is very small, and the voltage jitter situation is effectively improved. The overall anti-interference ability of the system is strong.
- (2)
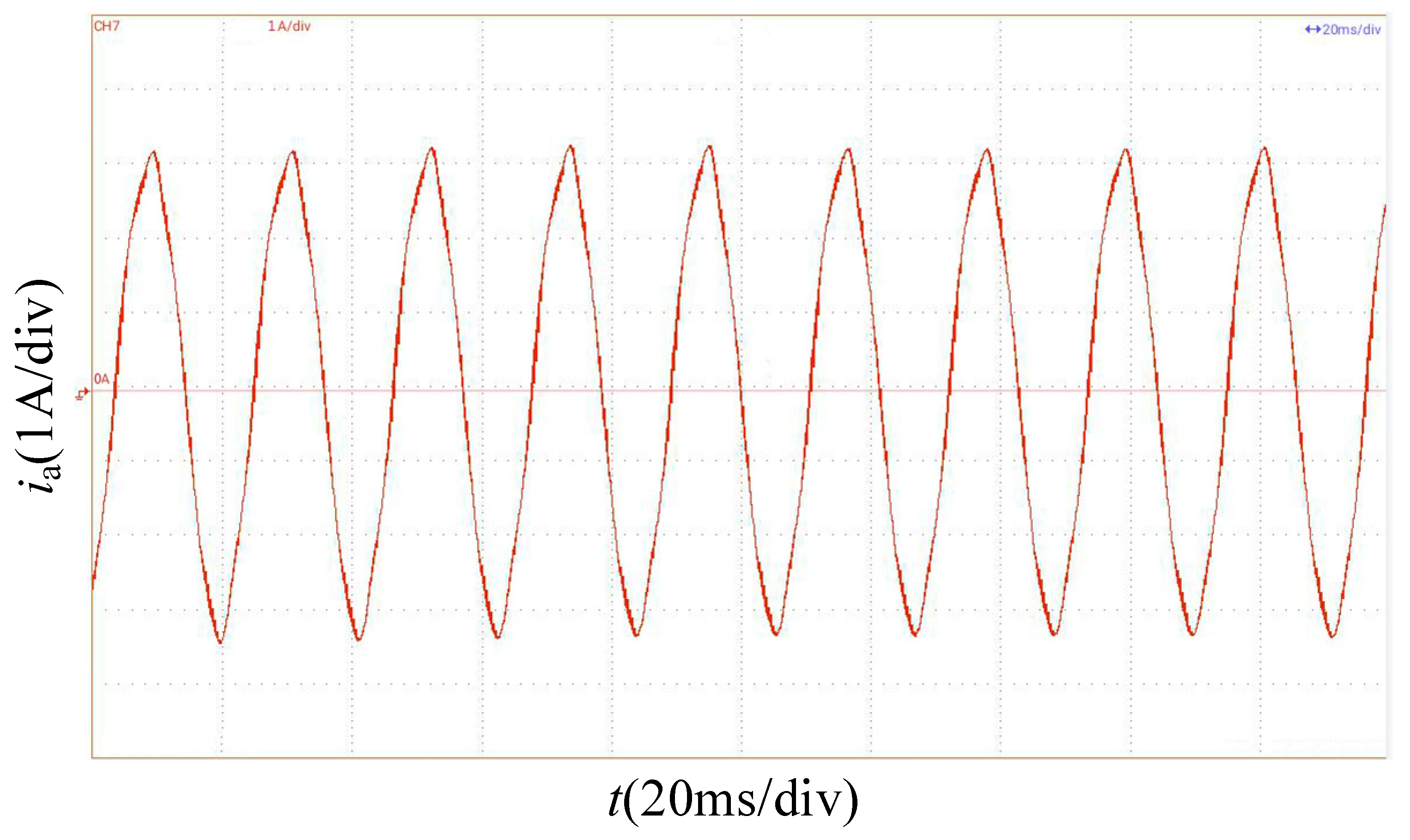
- The current inner loop adopts the MDPDC scheme that introduces time-delay compensation to improve the current tracking speed and accuracy, ensuring that the system always maintains high-power factor operation under external disturbance conditions. Moreover, the PMSG side current harmonic suppression effect is significant, reducing the harm of harmonics.
- (3)
- This scheme can still maintain high control accuracy and response speed even when the DC output voltage changes, making it convenient for integrating into different levels of power grids in the later stage.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cao, K. Research on PWM Rectification Technology of Permanent Magnet Synchronous Generator. Ph.D. Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2014. [Google Scholar]
- Wu, Y. Research on Voltage Stabilisation Control Technology of Permanent Magnet Synchronous Generator System Based on PWM Rectification. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2021. [Google Scholar]
- Li, Z. Design and Realisation of Three-Phase Tidal Current Energy Generation System. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2018. [Google Scholar]
- Qi, W. Research on Control Strategy of PWM Rectification System for Permanent Magnet Synchronous Generator. Ph.D. Thesis, Shanghai Institute of Electrical Engineering, Shanghai, China, 2019. [Google Scholar]
- Song, G. Current Harmonic Analysis of Permanent Magnet Synchronous Generator under PWM Rectifier Control. Ph.D. Thesis, Hunan University, Changsha, China, 2017. [Google Scholar]
- Flourentzou, N.; Agelidis, V.G.; Demetriades, G.D. VSC-Based HVDC Power Transmission Systems: An Overview. IEEE Trans. Power Electron. 2009, 24, 592–602. [Google Scholar] [CrossRef]
- Yin, Z.; Liu, J.; Zhong, Y. Study and Control of Three-Phase PWM Rectifier Based on Dual Single-Input Single-Output Model. IEEE Trans. Ind. Inform. 2013, 9, 1064–1073. [Google Scholar] [CrossRef]
- Gao, Y. Research on Three-Phase Voltage-Type PWM Rectification Technology. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2010. [Google Scholar]
- Liu, W.; Ding, M.; Zhang, Z. Research on Machine side PWM Control of Permanent Magnet Synchronous Wind Power Generation System. Electromech. Inf. 2020, 27, 1–3. [Google Scholar]
- Fang, K.; Li, B.; Zhang, L. Voltage regulation system of permanent magnet synchronous generator for electric drive mining cars. World Nonferrous Met. 2022, 2, 40–42. [Google Scholar]
- Zhang, Y.; Lu, T.; Jian, Z.; Li, Q.; Zhang, W.; Gao, Y. PWM rectification technology based on sliding mode observer without position control. Micromotor 2023, 11, 45–48. [Google Scholar]
- Xu, F.; Zhong, Z.; Sun, W.; Jin, M.; Shen, J. Improved topology for PWM rectification of low load to wave ratio permanent magnet synchronous generators. J. Electr. Mach. Control 2018, 2, 41–48. [Google Scholar]
- Wang, F.; Yang, A.; Yu, X.; Zhang, Z.; Wang, G. Model free predictive current control of three-phase Vienna rectifier based on adaptive super spiral sliding mode observer. J. Electr. Eng. 2024, 6, 1859–1870. [Google Scholar]
- Lin, H.; Liu, J.; Shen, X.; Leon, J.I.; Vazquez, S.; Alcaide, A.M.; Wu, L.; Franquelo, L.G. Fuzzy Sliding-Mode Control for Three-Level NPC AFE Rectifiers: A Chattering Alleviation Approach. IEEE Trans. Power Electron. 2022, 37, 11704–11715. [Google Scholar] [CrossRef]
- Shen, X.; Wu, C.; Liu, Z.; Wang, Y.; Leon, J.I.; Liu, J.; Franquelo, L.G. Adaptive-Gain Second-Order Sliding-Mode Control of NPC Converters via Super-Twisting Technique. IEEE Trans. Power Electron. 2023, 38, 15406–15418. [Google Scholar] [CrossRef]
- Shen, X.; Liu, J.; Liu, Z.; Gao, Y.; Leon, J.I.; Vazquez, S.; Wu, L.; Franquelo, L.G. Sliding Mode Control of Neutral-Point-Clamped Power Converters with Gain Adaptation. IEEE Trans. Power Electron. 2024, 39, 9189–9201. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, H. Study on an Improve Finite-Control-Set -Model Predictive Control (FCS-MPC) Strategy for a T-Type Rectifier with Direct Power Control Strategy. IEEJ Trans. Electr. Electron. Eng. 2021, 18, 442–450. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X. Self disturbance rejection model prediction direct power control for dual PWM rectifiers. Power Syst. Prot. Control 2024, 52, 45–56. [Google Scholar]
- Dang, C.; Wang, F.; Liu, D.; Tong, X.; Song, W. Sliding mode predictive control of Vienna rectifier based on optimal vector synthesis. Chin. J. Electr. Eng. 2022, 42, 8699–8708. [Google Scholar]
- Deng, X. Research on High-Speed PMSG Sensorless PWM Rectification System Based on LCL Filtering. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2011. [Google Scholar]
- Chen, C. Research on Sliding Mode Control Strategy of Three Phase Voltage Source PWM Rectifier. Ph.D. Thesis, South China University of Technology, Guangzhou, China, 2020. [Google Scholar]
- Shao, X.; Wang, H. Performance analysis of linear extended state observer and its higher-order form. Control Decis. 2015, 30, 815–822. [Google Scholar]
- Wang, H.; Huang, H. Performance and Application of Expansion State Observer. Control Decis. Mak. 2013, 28, 1078–1082. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Notation | Parameter | Value |
|---|---|---|---|
| 1 | Inverse electromotive force of PMSG (V) | 190 | |
| 2 | Equivalent inductance of PMSG (mH) | 0.3 | |
| 3 | Equivalent resistance of PMSG (Ω) | 0.1 | |
| 4 | External inductors (mH) | 1.7 | |
| 5 | Equivalent resistance of external inductance (Ω) | 0.01 | |
| 6 | DC-side capacitance (μF) | 1600 | |
| 7 | Rated load resistance (Ω) | 100 | |
| 8 | Given DC output voltage (V) | 650 | |
| 9 | Sampling frequency (kHz) | 10 | |
| 10 | Switching function coefficients | 4000 | |
| 11 | Exponential convergence coefficient | 218.5 | |
| 12 | 500 | ||
| 13 | 80,000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ran, Y.; Qiao, M.; Xia, Y. Research on Control Strategy of PMSG-PWM Power Generation System with Tidal Energy. Electronics 2024, 13, 2455. https://doi.org/10.3390/electronics13132455
Ran Y, Qiao M, Xia Y. Research on Control Strategy of PMSG-PWM Power Generation System with Tidal Energy. Electronics. 2024; 13(13):2455. https://doi.org/10.3390/electronics13132455
Chicago/Turabian StyleRan, Yukuan, Mingzhong Qiao, and Yihui Xia. 2024. "Research on Control Strategy of PMSG-PWM Power Generation System with Tidal Energy" Electronics 13, no. 13: 2455. https://doi.org/10.3390/electronics13132455
APA StyleRan, Y., Qiao, M., & Xia, Y. (2024). Research on Control Strategy of PMSG-PWM Power Generation System with Tidal Energy. Electronics, 13(13), 2455. https://doi.org/10.3390/electronics13132455