1. Introduction
With the rapid development of modern wireless networks, millimeter-wave becomes more prevalent for high-speed, low-latency and high reliability [
1,
2,
3,
4]. It is widely applied in a variety of scenarios, including 4D radar for autonomous driving [
5], beam management in 6G networks [
6,
7], integration of vehicle communication and WiFi [
8], reflect array antenna [
9] and biological interactions [
10]. These diverse applications underscore millimeter-wave’s transformative potential across multiple fields.
In the realm of the Internet of Things (IoT), achieving Ultra-Reliable Low-Latency Communication (URLLC) imposes stringent clock synchronization requirements on millimeter-wave communication systems [
11]. Precise clock synchronization is also a prerequisite to allow coordinated access to shared wireless channels in a time division multiple access (TDMA) manner [
12]. Ethernet clock synchronization technologies, particularly the Precision Time Protocol (PTP), are widely used in distributed Time-Sensitive Networks (TSNs) to achieve clock synchronization accuracy at the microsecond level. As a development trend which TSN and wireless technologies are expected to converge in the wireless TSN paradigm, the integration of Ethernet time synchronization technology into millimeter-wave communication systems has garnered significant attention from researchers aiming to improve network synchronization accuracy effectively [
13,
14,
15].
The main issue with PTP and similar protocols lies in the assumption of symmetric delays in packet exchange between master and slave nodes. This assumption implies that the transit time of packets from the master to the slave is equal to the transit time from the slave to the master. However, in most of practical scenarios, this assumption does not hold due to the asymmetry of transmission links. In real distributed networks, packet transmission delay comprises nodal processing, queuing, transmission, and propagation delays, which are unpredictable and easily affected by link congestion or varying distances [
16]. This discrepancy between the assumption and reality leads to errors in clock offset estimation in PTP time synchronization, limiting its effectiveness. To address this issue, some advanced clock synchronization protocols take into account asymmetric characteristics and other factors, such as frequency drift [
17], network topology [
18], variable data rates, and node mobility [
19], improving synchronization accuracy at the cost of higher algorithmic complexity.
Furthermore, for dynamic network environments where the positions of nodes change rapidly and the distance between nodes is variable, the motion errors caused by asymmetric propagation distance during the synchronization period become more pronounced. While motion errors can be mitigated by using Global Navigation Satellite Systems (GNSS) or other high-precision navigation devices [
20], these solutions entail higher costs, susceptibility to interference, and unreliable performance. As a remedy, an improved protocol proposed by [
21] involves adding an additional message in each time slot and averaging the clock offset calculated from two responses. The averaging operation somewhat reduces errors caused by changes in the propagation environment and mobility. However, this method introduces extra overhead and computation to the system and fails to eliminate motion error. To enhance time synchronization precision for tactical data links, the author of [
22] proposes an approach that involves minimizing the time difference between inquiry and response to decrease errors caused by displacement during these periods. This approach does not add extra overhead and performs well at low relative speeds. However, it requires large bandwidth resources and degrades communication capacity, and its performance deteriorates at high relative speeds. Inspired by [
21,
22,
23], assumes that the motion state of two nodes within a synchronization time slot is the uniform state, rather than the static state assumed by [
21]. This approach calculates clock offset by considering the consistent change in propagation time over equal time intervals, thereby further reducing errors under the assumption of uniform state. Compared to [
21,
22], the theoretical motion error of [
23] is significantly reduced. However, when the relative motion is not uniform, the performance of this method deteriorates. Additionally, it increases system overhead and requires high precision in obtaining timestamps at intermediate moments.
Although the methods in [
21,
22,
23] can reduce motion errors and improve clock synchronization accuracy, they have two significant drawbacks. First, they substantially modify the traditional time synchronization protocol and increase system complexity. This added complexity can lead to slot or signaling resource conflicts, making it difficult to expand to distributed TSNs. Second, their performance deteriorates significantly at high relative speeds between master and slave nodes. In high dynamic millimeter-wave scenarios, such as Inter-Flight Data Links (IFDL) [
24,
25], near-space relay systems [
26,
27,
28], and inter-satellite links [
29,
30], the relative speed can reach several Mach. Even after correction by these methods, motion errors remain significant, amounting to several nanoseconds or even tens of nanoseconds. This fails to meet the synchronization accuracy requirements of millimeter-wave communication systems. Therefore, better solutions are necessary.
In fact, under the symmetric assumption of PTP propagation delay, motion errors are closely related to the estimated one-way propagation delay. Theoretically, if the distance between the master and slave nodes is accurately measured, motion errors can be completely eliminated. Based on our review on the existing literature, we conclude that no studies have explicitly focused on the estimation and compensation of the asymmetric propagation delay. To tackle this open problem, Chinese Remainder Theory (CRT)-based algorithms, which have found widespread application in various fields such as cryptography [
31], SAR imaging [
32], pulse Doppler radar [
33], and phase unwrapping [
34], are introduced in the context of TSNs. Studies have demonstrated that accurate distance estimation can be achieved using multi-carrier phase measurements based on CRT [
35,
36]. Nevertheless, the maximum ranging distance of CRT-based algorithms is constrained by the least common multiple (LCM) of their modulus [
37]. In actual millimeter-wave TSNs [
24,
25,
26,
27,
29,
30], however, the distances between master and slave devices can span hundreds of kilometers, which significantly exceeds the theoretical scope of CRT and thus precludes its practical applications.
To address the mentioned concerns, this paper proposes an enhanced PTP design by incorporating the multi-carrier ranging approach. The proposed method combines the coarse estimate of propagation delay from conventional PTP with the fine estimate of remainder delay using CRT, enabling accurate estimation of asymmetric propagation delays between master and slave nodes. By effectively mitigating motion errors caused by the relative movement of master and slave nodes within synchronization time slots, the enhanced PTP achieves precise clock offset estimation, particularly in high dynamic conditions.
2. PTP Protocols and Error Analysis
PTP operates as a bidirectional packet exchange protocol for time synchronization. Its core principle involves utilizing the Best Master Clock (BMC) algorithm, which selects the most accurate clock source as the primary reference clock. The slave clocks exchange message information and employ the Local Clock Synchronization (LCS) algorithm to calculate the clock offsets. Periodically, it synchronizes and adjusts all clocks in the network to ensure precise time synchronization across all devices within the system [
38].
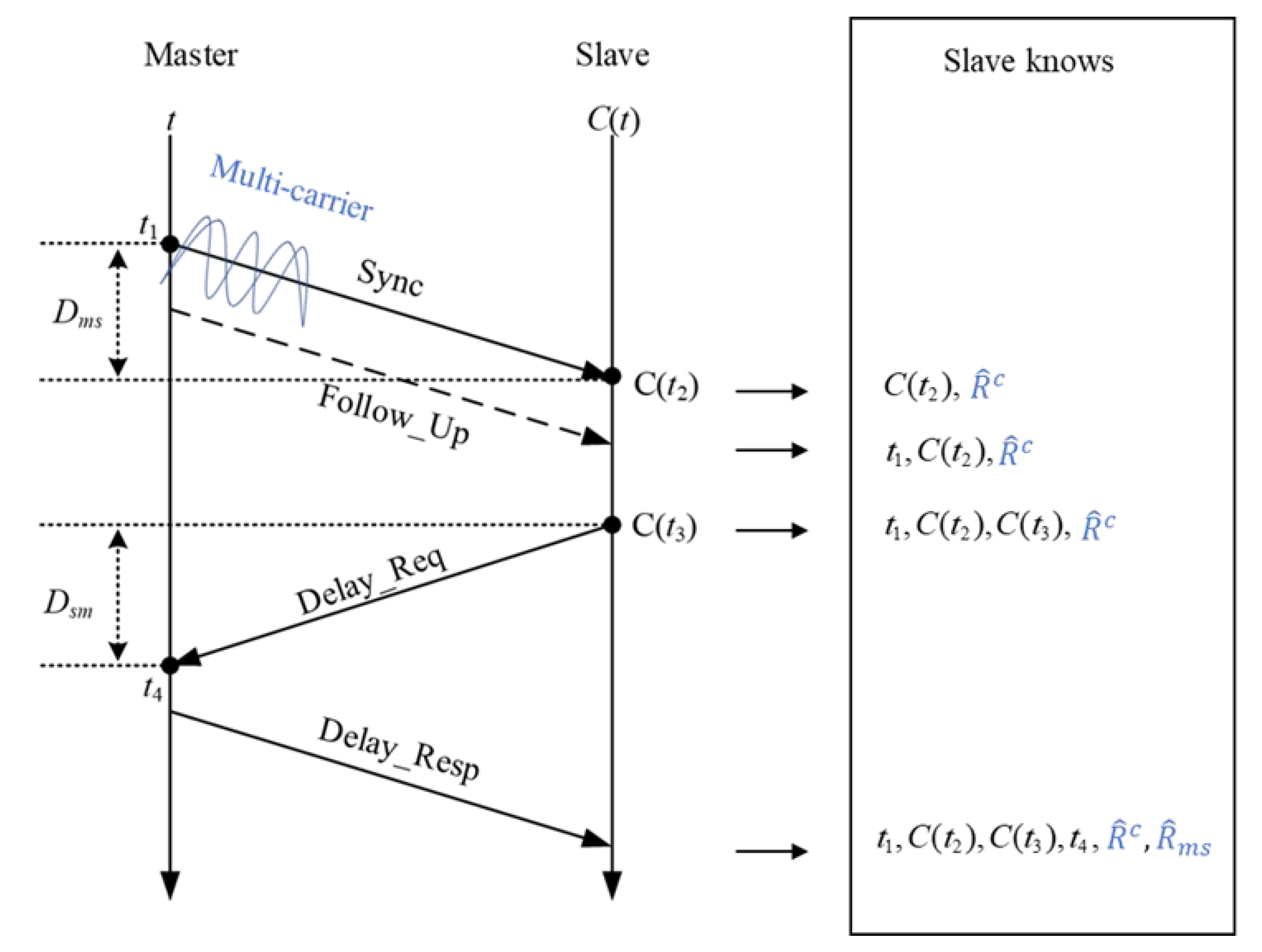
The process of time synchronization between the master and slave clocks achieved through message exchange, is illustrated in
Figure 1. Let
t and
represent the time of the master and the local slave clocks, respectively. The clock offset, denoted as
at time
t, indicates the time deviation between different clocks.
To eliminate the clock offset
at
, the master and slave clocks continually exchange timestamps of message sending and receiving moments. Leveraging link symmetry, the slave clock computes the clock offset from the master and adjusts the local clock to synchronize with it. The specific steps are as follows:
Step 1: At , the master sends a Sync message to the slave and records the timestamp . Subsequently, the master sends a Follow-Up message containing the timestamp information.
Step 2: After receiving the Sync and Follow-Up messages successively, the slave measures the local timestamp
of the Sync arrival time and obtains the
timestamp information from Follow-Up. The difference between the
and
is equal to the sum of the clock offset and propagation delay between the master and slave, denoted as
.
Step 3: The slave clock sends a Delay-Req message to the master and measures the local timestamp .
Step 4: The master receives the Delay-Req message and measures the arrival time
. Subsequently, it sends a Delay-Resp message containing the
timestamp. Let
denote the propagation delay from the slave to the master node.
Step 5: After receiving the Delay-Resp, the slave utilizes the timestamp information to determine both the propagation delay and clock offset. Assuming symmetric propagation delays for packets exchanged between master and slave nodes, i.e.,
, the estimation of one-way propagation delay and clock offset can be expressed as:
After estimating
, the slave node adjusts its clock to synchronize with the master.
In the conventional PTP described above, the assumption of symmetric propagation delay is necessary during the time synchronization period. While this assumption is valid in an Industrial Internet application, where the distance variation between master and slave nodes is negligible, it poses challenges in dynamic environments like unmanned aerial vehicle networks [
24,
25]. In such scenarios, the asymmetry in propagation delay caused by the relative movement of nodes leads to larger errors, significantly impacting clock synchronization performance.
If propagation delays are asymmetric, i.e.,
, according to (
2) and (
3), the estimation of clock offset can be expressed as
Compared to (
5), the motion error
induced by the asymmetric propagation delays of PTP can be expressed as
where
denotes the relative speed between two nodes, and
denotes the time difference between inquiry and response of slave nodes, i.e.,
.
Equation (
7) indicates that the motion error
resulting from the relative movement of nodes depends on the relative speed
and time difference
. In tactical data links such as Intra Flight Data Link (IFDL) and Intra Missile Data Link (IMDL), nodes experience extremely rapid relative motion. For instance, with
, when the relative speed between terminals reaches Mach 10, the maximum motion error can be
, significantly compromising clock synchronization accuracy.
However, when comparing Equations (
4) and (
7), a close relationship between the estimation of one-way propagation delay
and the motion error
can be found that
Equation (
8) implies that accurate acquisition of
or
enables precise estimation and compensation of motion errors
, thus enhancing clock synchronization accuracy. Motivated by this insight, the CRT-PTP distance estimation method is proposed, which accurately estimates motion errors without directly altering the time synchronization protocol, unlike in [
21,
22,
23].
3. Proposed CRT-PTP
As discussed in
Section 2, the conventional PTP scheme sidesteps the motion error induced by the asymmetry propagation delay caused by the relative displacement between the master node and slave node within the synchronization time slot. To fulfill this research gap, in this section, we propose an enhanced PTP with the aid of CRT. It incorporates the coarse estimation of the propagation delay by the conventional PTP with the fine estimation of the remainder delay by CRT to precisely reconstruct the asymmetric delay between the master node and slave node.
As shown in
Figure 2, the mechanism of the proposed CRT-PTP can be interpreted as follows.
Step 1: At , the master sends a Sync message carried by multiple carriers and subsequently sends a Follow-Up message with the timestamp information.
Step 2: The slave receives Sync and measures the remainder phase at each frequency, then calculates the remainder distance of master-slave node using CRT. Meanwhile, the slave node measures the local timestamp and obtains from the Follow-Up message.
Step 3: The slave clock sends a Delay-Req message to the master and measures the local timestamp .
Step 4: The master receives Delay-Req and measures the arrival time , and then sends a Delay-Resp message with the timestamp.
Step 5: After receiving the Delay-Resp, the slave calculates the coarse estimation
from (
4), and combines it with the fine estimation
to obtain the estimated actual distance between the master and slave node
. Converting
to the actual delay
, allows for the calculation of motion error using (
8)
Finally, the modified estimation of clock offset is obtained
Equation (
10) suggests that motion error can be eliminated if
can be correctly estimated. As shown in
Table 1, the proposed CRT-PTP is compared to the existing method. i.e., Extra-PTP (E-PTP) [
21], Moved-PTP (M-PTP) [
22], and Double-Reply PTP (DR-PTP) [
23]. Without any modification to the slot structure of conventional PTP, the key of the proposed CRT-PTP is accurate distance estimation using multiple carriers with the aid of CRT, which is introduced as follows.
3.1. Multi-Carrier Ranging Based on CRT
The core of the CRT-based methods is to determine the distance between the master node and slave node by measuring the phase shifts of multiple carriers. It is well-known that the phase shift of electromagnetic waves varies periodically over the transmitting distance. For multi-carrier signals with
L independent carriers, the propagation distance
R, which is unknown yet, can be represented as
where
is the wavelength of the
i-th carrier,
is referred to as the folding integer, and
is the reminder wavelength. Note that
Z denotes the set of integers. Obviously, we can write
as
, where
is the remainder phase at the receiver, which can be obtained using the carrier phase measurement technique [
39].
CRT is an effective tool for solving congruence equations similar to (
11) [
40]. However, since
in Equation (
11) is not an integer, CRT that is only valid in the integer domain cannot be directly applied. To tackle this problem, the wavelength
is first quantized as the integer. That is
where
u represents the quantization factor, and
stands for the integer rounding operation. Therefore, (
11) can be modified to
where
and
denote the quantized distance and quantized remainder wavelength, respectively, with
.
Let
M be the greatest common divisor (GCD) of all
,
. Accordingly we have
for
, where
are assumed to be co-prime, i.e.,
. Defining
and
,
, we denote the modular multiplicative inverse of
modulo
as
, which renders
Note that
can be determined using the Extended Euclidean algorithm or another improved method [
41].
The common remainder is defined as
Let
where
stands for the integer flooring operation. Obviously,
If and only if
,
can be uniquely reconstructed as
Therefore,
N can be uniquely reconstructed as
In actual measurement, the measurement of the remainder wavelength will inevitably introduce error due to noise, i.e.,
where
denotes independent remainder error and is assumed to follow wrapped normal distribution with zero mean and variance
.
can be calculated as
where
denotes the remainder wavelength error before quantization and
denotes phase measurement noise. In phase measurement, the standard deviation of the measurement noise is assumed to be proportional to the corresponding wavelength [
42,
43], i.e.,
, where the factor
is a small constant.
However, the conventional CRT algorithm is known to lack robustness and is highly sensitive to remainder errors. Even a small remainder error can result in a significant error in the estimated value [
37]. To address this issue, the author of [
44] has proposed a robust CRT algorithm based on maximum-likelihood estimation (MLE). This algorithm offers low computational complexity and effectively addresses the problem of over-sensitivity to remainder noise. The MLE-based CRT algorithm is briefly described as follows [
44].
From (
17) we see that the common remainder
is significant for estimating
and consequently
N. In the noise-free case,
can be determined from any remainder
modulo
M. However, for noisy remainder
, their remainders modulo
M, i.e.,
may be different from each other due to the errors. To obtain the optimal estimation of
N, the common remainder
should be determined optimally. According to the probability density function (PDF) of the wrapped normal distribution with mean
and variance
for
for a given
N, the optimal estimation of common remainder can be characterized as
where
denotes the weight of the remainders and can be expressed as
It’s clearly that
and
. Note that
is a constant when all the variances of the phase noise are known. Equation (
24) indicates that the larger the measurement noise of the subcarrier, the smaller the corresponding weight to reduce the impact of noise on the performance of algorithm. Moreover,
denotes a circular distance function which is used to simplify the PDF
and the set
satisfies
where
is a set satisfying
. Equation (
26) indicates that the optimal
is in a finite set with
L candidates that is independent of
M.
After
is obtained,
can be estimated as
Then,
can be uniquely reconstructed as
and
N can be uniquely reconstructed as
Finally, considering the quantization factor, the estimation of unknown distance can be calculated as
The unknown distance can be robustly determined by the algorithm above when the remainder error is constrained as
Equation (
31) shows that the greater the GCD
M of the quantized wavelength
, the better the robustness of the CRT. If
is co-prime, then the CRT has the worst robustness.
However, the maximum ranging distance of the CRT algorithm is constrained by the LCM of its modulus, i.e.,
represents the exact reconstruction of
R only if
. Equation (
32) demonstrates that the maximum ranging distance is influenced by the number of carriers. A higher number of carriers increases the maximum ranging distance, but at the expense of computational complexity. In practical engineering scenarios, a trade-off must be made between the number of carriers and computational complexity. Thus, in distance estimation using multi-carrier phase measurement, this value is typically much smaller than the actual distance between master and slave nodes in dynamic environments. Consequently, it cannot be directly applied to propagation delay estimation. To tackle this issue, we propose an enhanced PTP that integrates CRT to address the limited theoretical range of CRT while simultaneously mitigating the motion error
caused by the asymmetric propagation delay of conventional PTP.
3.2. Proposed CRT-PTP Distance Estimation
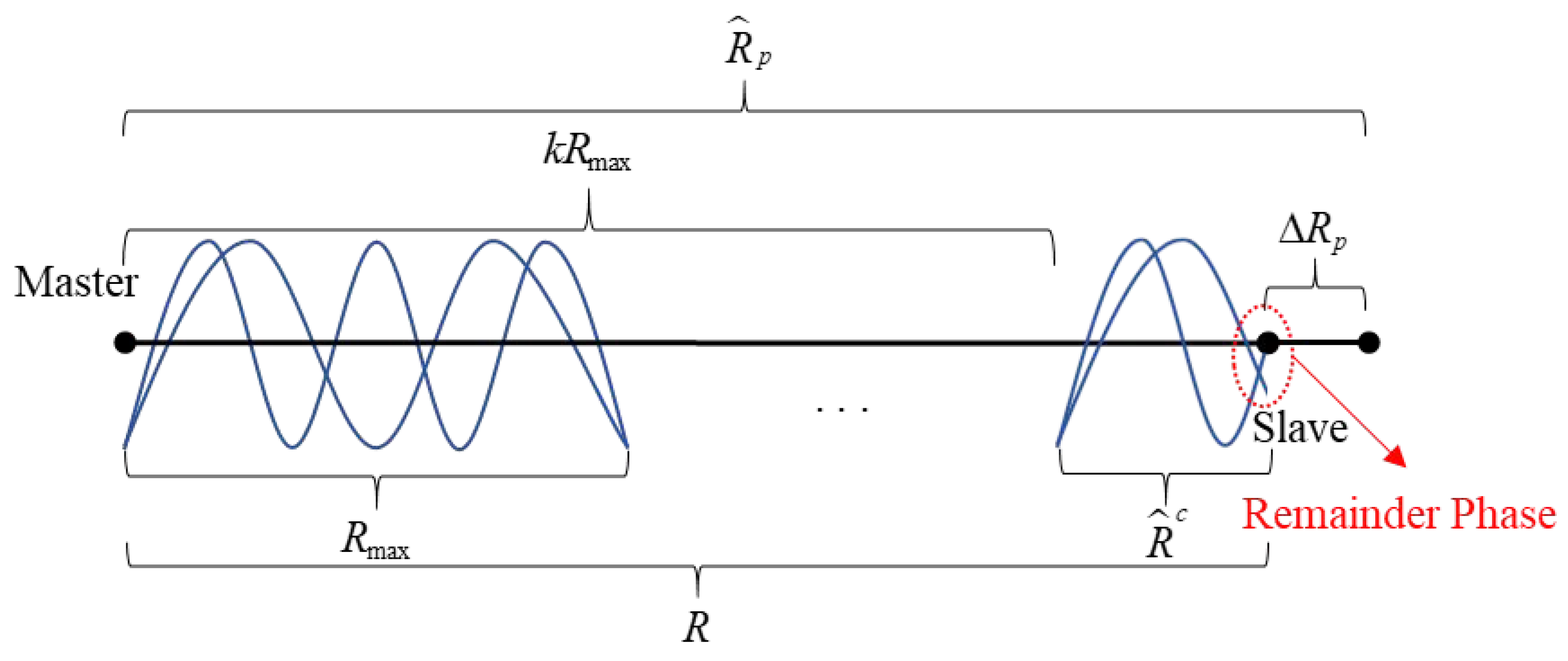
As shown in
Figure 3, if the actual distance between master and slave nodes is larger than the maximum ranging distance of the CRT, i.e.,
where
is the remainder distance,
is the unknown integer multiple period. Rewriting congruence Equation (
11)
From(
32), we know that
is an integer multiple of the product of each wavelength. Then (
34) can be converted as
Owing to
, if the remainder error satisfies (
31),
can be accurately reconstructed based on CRT from (
23)–(
30).
From
Section 2, assuming symmetric propagation distances between the master and slave nodes, if we acquire the coarse estimation of the one-way propagation delay
from conventional PTP, then the coarse estimated distance can be calculated as
Combing
with the fine estimation
from CRT, then unknown integer
k in (
33) can be determined as
Therefore, the accurate estimation of the distance between master and slave nodes can be reconstructed by
As shown in
Figure 4, by accurately estimating the distance between master and slave nodes, the motion error can be compensated. The proposed CRT-PTP only requires the use of multi-carriers containing waveforms with wavelengths that are either co-prime or become co-prime after extracting the GCD to transmit Sync messages. This approach avoids modifications to the synchronization process of conventional PTP, leading to cost and resource savings.
3.3. Performance Analysis
3.3.1. Robustness Analysis
As mentioned above, the proposed CRT-PTP combines coarse estimation from conventional PTP with fine estimation from CRT, thereby linking its robustness to both methods.
For the fine estimation from CRT, algorithmic robustness hinges on meeting the criteria outlined in Equation (
31). The measurement of the remaining wavelength essentially boils down to phase measurement, as indicated in (
21), where the remainder error in phase measurement must adhere to the requirements as
Equation (
39) indicates that the robustness of phase measurement noise is independent of
u since
M is quantized. Fundamentally, the GCD amplifies not only the true value but also the noise, so the robustness of the algorithm cannot be improved by using smaller
u. Additionally, when
u is set to a specific small value, the robustness of phase measurement noise remains constant for a set of multi-carriers with similar wavelength relations, regardless of changes in their center frequencies. It means that longer wavelengths do not improve its robustness. Similarly, when the wavelengths are co-prime, the robustness is at its worst.
Considering the motion error associated with the coarse estimation
, let’s perform an error analysis on (
37). Assuming that
can be accurately reconstructed by CRT, and the error
is not an order of magnitude compared to
due to the small wavelengths of sub-carriers, then
where
is motion distance error due to the relative movement of nodes. This error must be constrained by
then
and
can be accurately estimated by (
38).
Equation (
41) demonstrates the close relationship between the robustness of CRT-PTP and
. According to Equation (
32),
, where
M is quantized. Therefore,
is independent of
u. For a set of multi-carriers with similar coprimeness, longer wavelengths imply a larger
, which corresponds to the improved robustness of the algorithm, enabling it to accommodate more severe relative motion between master and slave nodes.
3.3.2. Accuracy Analysis
If (
39) and (
41) can be satisfied simultaneously, the root mean square error (RMSE) of the proposed method is only related to the MLE-based CRT, which can be expressed as [
44]
where
denotes expectation. Since phase measurement noise is proportional to wavelength [
42,
43], the signal-to-noise ratio (SNR) is defined as
Equations (
42) and (
43) indicate that at the same SNR, longer wavelengths result in a larger
, leading to higher theoretical
values and decreased ranging accuracy of the proposed method. This is understandable because longer wavelengths correspond to lower carrier frequencies and smaller bandwidths, which reduces ranging accuracy and consequently decreases the accuracy of motion error estimation. Therefore, while the proposed CRT-PTP theoretically supports longer wavelengths, the specific scope depends on the required time synchronization or the corresponding ranging accuracy requirements. If the required ranging accuracy is
, then the multi-carrier wavelengths need to satisfy
In addition, the most computationally intensive part of the proposed method is the fine estimation based on CRT. Thanks to the fast MLE-based algorithm, it only needs to search L elements, where L is the number of sub-carriers. Therefore, the extra computational cost is acceptable by choosing an appropriate multi-carrier. However, the benefit of this price is that there is no modification to the original PTP. Not only does it accurately compensate for motion errors, but it can also be easily extended to distributed TSNs.
4. Simulation Results
To validate the effectiveness of the proposed CRT-PTP, simulations are performed as follows. We assume that the distance from master to slave
was uniformly distributed between 0 and 100 km. The slave node receives the synchronization signals transmitted by the master node using multi-carriers and determines the remainder phases through phase measurement techniques. The noise of phase measurement is assumed to follow wrapped normal distribution with zero mean and variance
, and
is proportional to the wavelength
. The quantization step
u is set to 0.0001 m. We suppose that the estimation error of conventional PTP
is uniformly distributed between
with variance
and we define a factor as
The process of determining
is called as a trial. In each trial, for a random
, the remainder phases of each sub-carrier are calculated at the receiver. After adding the noise and quantization, the accurate remainder distance estimation
is then calculated using the MLE-based CRT method. Simultaneously, PTP ranging noise
is randomly generated to simulate motion error. The PTP coarse estimate of the one-way propagation path is then
. Finally, the estimated value
is calculated according to (
37) and (
38). If
is determined correctly, i.e., satisfying
where the error bound
is set to
[
44], then the trial passed, otherwise failed. Monte Carlo simulation is performed 10,000 times to calculate trial fail ratio (TFR).
To evaluate the impact of different factors such as carrier frequency, coprimeness of wavelengths, and the number of carriers on algorithm performance, we select the multi-carrier configurations outlined in
Table 2.
In
Figure 5, the RMSE and TFR performance versus SNR for the proposed CRT-PTP with
is illustrated. For cases 1–3, the remainder error fails to satisfy Equation (
39) at low SNR levels, preventing the accurate reconstruction of
by the CRT. Consequently, CRT-PTP cannot calculate
correctly, resulting in a large error and TFR = 1. With increasing SNR, the remainder error gradually diminishes, leading to improved RMSE and TFR performance. Once the SNR surpasses a certain threshold, the TFR of CRT-PTP becomes 0, and the corresponding RMSE aligns with the theoretical curve represented by (
42).
Upon comparison of case 1 and case 2, it is evident that their theoretical RMSE values are closely matched, with case 2 exhibiting earlier convergence to the theoretical value compared to case 1. This disparity arises from the greater GCD in case 2 relative to case 1, indicating superior robustness to phase measurement noise and consequently a lower SNR convergence threshold for its CRT-PTP. Similarly, when comparing case 1 and case 3, it becomes apparent that their convergence thresholds and TFR curves align perfectly. However, owing to its shorter wavelength, case 3 yields a superior theoretical RMSE value for distance estimation.
However, in case 4, the CRT-PTP fails to accurately calculate
regardless of the SNR magnitude. This discrepancy arises because the maximum ranging distance
in case 4 is smaller than
, thereby failing to meet the requirements of Equation (
41). With an inaccurate integer estimation
, the CRT-PTP cannot reconstruct
effectively. To enhance
and bolster the resilience of CRT-PTP, it is imperative to augment the number of carriers. As exemplified in case 5, the trade-off for improved robustness entails an increase in computational workload.
Figure 6 illustrates the RMSE and TFR versus
when
for case 1. As depicted in
Figure 5,
can be accurately reconstructed by CRT under this condition. The theoretical bound
for this example is depicted in
Figure 6. If
is smaller than the bound, the estimation error of conventional PTP becomes significant, leading to the failure of accurately determining
from (
37), resulting in CRT-PTP reconstruction failure. Conversely, if
exceeds the bound, the TFR of the proposed algorithm becomes 0, and the RMSE equals the corresponding fixed value as shown in
Figure 5. These findings confirm that
can be accurately determined by the proposed CRT-PTP when the motion error of conventional PTP is satisfied (
41).
Additionally, we compare with the following existing methods, i.e., E-PTP [
21], M-PTP [
22], and DR-PTP [
23].
Figure 7 illustrates the comparison of motion errors between existing techniques and the proposed method for case 3 with
and
. In terms of accuracy, E-PTP can be considered an average of M-PTP and PTP. DR-PTP is much better than M-PTP. By assuming that the changes in propagation delay are equal over the same time intervals, DR-PTP reduces motion error further. The proposed CRT-PTP significantly outperforms the existing method by achieving a precision level of
, meeting the criteria for motion error compensation in dynamic scenarios of millimeter-wave communication systems. The cumulative distribution function (CDF) of motion error is depicted in
Figure 8, demonstrating the effective reduction of motion error achieved by the proposed CRT-PTP.
Figure 9 shows the relationship between motion error and the relative speed between the master and slave nodes. Clearly, the motion errors of PTP, E-PTP, and M-PTP all increase with relative speed. When the speed reaches
, the motion error for M-PTP is about
, which cannot meet the requirement of millimeter-wave communication systems. The error for DR-PTP is independent of relative speed because it assumes uniform motion, so its motion error is actually related to the relative acceleration between the master and slave nodes. The proposed CRT-PTP performs the best, with a motion error estimation precision consistently at
, unaffected by relative speed. That means the proposed method can accurately estimate
and then compensate for motion errors regardless of the movement of the master and slave nodes.
5. Conclusions
In this paper, we propose an enhanced PTP based on CRT for millimeter-wave communication systems to mitigate the motion errors. Unlike traditional methods that require modifying the PTP structure, our approach can easily expand to distributed TSNs. The proposed CRT-PTP only involves the master node utilizing multi-carrier signals to transmit Sync messages, while the slave node measures the remainder phase and obtains a fine estimation of the remainder distance using CRT. By combining this fine estimation with the coarse estimation of propagation delay from conventional PTP, we can accurately reconstruct the propagation distance between the master and slave nodes and then compensate the motion errors. The proposed method exhibits robustness against phase measurement noise and ranging errors from conventional PTP, achieving a precision of in estimating motion errors and remaining unaffected by the relative velocity between master and slave nodes. With a low computational load, it effectively mitigates motion errors resulting from the relative displacement of nodes during the synchronization period, thereby improving the accuracy of clock offset estimation.
As a remark, this paper solely addresses motion errors resulting from asymmetric propagation delays. However, it’s worth noting that the asymmetry in PTP packet exchange delays also encompasses nodal processing, queuing, and transmission, along with hardware characteristics and environmental factors. To enhance clock synchronization accuracy further, these asymmetric factors should be modeled and estimated for achieving high-precision clock synchronization, which can be considered as promising future work.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}