1. Introduction
With the popularization and development of the Internet, the Internet of Things, and mobile terminals, people’s demand for access to the network anytime and anywhere is more and more urgent. Satellite networks are playing an increasingly important role in communication due to their wide coverage, large communication capacity, safety and reliability, and have attracted extensive attention from academia and industry [
1]. Satellite networks can not only expand and supplement the ground network, but also provide reliable data transmission and normal communication in natural disasters, emergency rescue, geological survey, and other applications [
2]. The upcoming 6G will be integrated into a wireless system through satellite networks, terrestrial cellular networks, and airborne networks to achieve seamless stereo coverage around the world. The global coverage achieved by satellite networks can support higher-quality global media transmission, including high-definition video, virtual reality, and augmented reality content [
3]. 6G combined with satellite networks will provide higher-speed and more stable satellite Internet services and improve Internet access in remote and rural areas. 6G is also expected to further develop smart cities, smart healthcare, and the Internet of Things, and support real-time communications for large-scale devices. As an important part of the integrated information network, the satellite network has been valued by many countries. Routing technology is the core of the satellite communication network, aiming to ensure efficient and reliable transmission of data between satellite nodes [
4]. Due to the highly dynamic nature of the topology in satellite networks, it is difficult to adopt the mature routing technology used in ground networks. Therefore, it is necessary to design a routing strategy that conforms to the characteristics of the satellite network. One of the typical characteristics of satellite networks is the unbalanced network load. From the perspective of an individual satellite, the relative motion between the satellite and the Earth results in constant fluctuations in the traffic load. For example, a satellite covering land areas may transition to covering oceans after a certain period. From the overall point of view, due to the uneven distribution of user density and traffic demand of satellite networks, the utilization of satellite network resources is unbalanced. In addition, the unstable connection of inter-satellite links is caused by the complex working environment of satellite networks. This feature will cause data packet loss and data incompleteness during data transmission. The instability of satellite links can also cause routers to make inappropriate decisions, such as choosing the shortest path over the unstable link rather than the more reliable path. The unpredictable nature of satellite link instability poses ongoing challenges in maintaining a consistent and reliable communication environment. As a result, this complex interplay of factors heightens the likelihood of data loss, compromises data integrity, and overall contributes to a decline in network performance.
To address the issues of uneven satellite network load and unstable link connections, this paper proposes a globally adaptive satellite network routing strategy, named G-AODV, based on traffic prediction. This strategy is an improvement upon the original AODV on-demand routing protocol. In the route discovery phase, the traffic prediction mechanism is merged. As traffic load data are typically time-series data, neural networks demonstrate excellent performance in handling such data. They can capture temporal correlations, aiding in the time-series prediction of future traffic loads [
5]. Therefore, in this paper, the traffic load of the satellite is predicted by the neural network model. The forward control mechanism and path update mechanism are used to avoid heavy load nodes appearing in the routing path. In the route maintenance stage, to avoid the secondary fracture of the repaired link, the node stability is defined, and the route repair mode is selected according to the broken position of the link.
The contributions of this paper are as follows:
- (1)
During the route discovery phase, a traffic prediction mechanism is introduced. Predicting the satellite’s traffic load for the next moment in advance is achieved through a neural network model. Based on the predicted traffic load and a comparison with a traffic threshold, data packets are selectively forwarded to prevent heavily loaded nodes from being included in the final established route. This helps avoid potential network paralysis by mitigating the presence of overloaded nodes in the overall routing.
- (2)
Add a path change mechanism during routing. In this mechanism, congestion control signals are designed. Nodes that may be congested inform upstream nodes of changing paths in advance to avoid increasing congestion and achieve load balancing.
- (3)
Considering the dynamic characteristics of satellite nodes and unstable characteristics of satellite links, the routing table is improved, and the concept of node stability is introduced in the route maintenance stage. According to the location of the fracture, choose the source node repair or local repair. In the local restoration, the stability of the upstream and downstream nodes of the fracture was compared. Select more stable nodes for path repair to avoid secondary route breakage and improve route stability and reliability.
The structure of this paper is as follows:
Section 2 introduces the research status of satellite network routing at home and abroad.
Section 3 describes the overall framework of the G-AODV routing protocol.
Section 4 introduces the improved route discovery phase.
Section 5 introduces the improved route maintenance phase.
Section 6 verifies the advantages of G-AODV through simulation.
Section 7 summarizes the full text. The abbreviations and terms mainly used in this article are shown in
Table 1.
2. Related Research
Due to the dynamic changes of satellite network topology, traditional terrestrial Internet routing protocols, such as Routing Information Protocol (RIP) and Open Shortest Path Protocol (OSPF), do not apply to satellite networks [
6]. According to different triggering principles, the routing protocols applied to satellite networks can be divided into table-driven routing protocols and on-demand routing protocols.
Typical table-driven routing protocols include Destination-Sequenced Distance-Vector (DSDV) and Optimized Link State Routing (OLSR) [
7]. DSDV enables each node to advertise the routing table to its neighbors and maintain and update the routing table regularly, as well as when certain events occur, such as a disconnection [
8]. Imani A et al. proposed a new heterogeneous routing protocol based on DSDV [
9]. The protocol dynamically divides the network nodes into multi-hop clusters, the cluster heads are elected as backbone nodes in a distributed manner, and some long-distance high-capacity links are used as part of its routing. To meet the specific service requirements of large-scale star cluster systems, the literature [
10,
11] improved OLSR, improved network performance and scalability, and reduced protocol overhead within the network.
In the table-driven routing protocol, which has the characteristic of faster routing lookup by group, each node must maintain a constantly updated routing table. No matter whether the route in the routing table has data to be transmitted, each node must periodically generate a large number of control packets to maintain the route, which will consume a large amount of limited network bandwidth and reduce the transmission performance of the network. In addition, the rapid change of satellite network topology will make the routing table information of table-driven routing protocol easily obsolete, resulting in a large amount of resource waste. As a result of these factors, the table-driven protocol is not suitable for the working environment of the satellite network.
Typical on-demand routing protocols include Ad hoc On-Demand Distance Vector Routing (AODV), Dynamic Source Routing (DSR), etc. [
12]. To verify the applicability of the AODV routing protocol to satellite networks, Marcano N J H et al. compared the AODV routing protocol with flooding [
13] and implemented a network simulator in C# language for routing selection of different satellites. The results show that the AODV routing protocol can be effectively applied to satellite networks. Fuger K et al. proposed a routing policy AODV-LD based on link duration [
14]. This strategy estimates the link duration according to the satellite’s position and speed. Simulation results show that this strategy can achieve the same packet delivery rate as AODV in all scenarios. Tekouabou SKO et al. proposed a routing algorithm based on the delivery success rate [
15]. This algorithm obtains the historical delivery success rate of the channel through mathematical statistics and selects the path with the highest delivery success rate for forwarding. However, this strategy has a large transmission delay.
The common feature of the routing discovery mechanism in the on-demand routing protocols is that the route is maintained only when the node has data to send. The source node sends the routing request packet, and the intermediate node receiving the routing request packet will continue to forward the packet, namely the RREQ packet, regardless of the current load intensity. After receiving a routing request packet, the destination node returns a response packet (RREP packet) along the shortest path of the request packet. Compared with the table-driven routing protocol, this on-demand routing mechanism can greatly reduce the control groups in the network and reduce the network burden when there is less demand for routing request grouping and routing maintenance grouping. However, when the traffic volume of network communication reaches a certain number, the reliability of network transmission still cannot be guaranteed. In addition, when the communication traffic is heavy, the number of node connection pairs in the network will also increase, resulting in an increasing traffic load. Additional overhead becomes difficult to control, and network performance deteriorates dramatically.
The root cause of the above problems is that the routing mechanism of the above protocols does not consider the problem of node load balancing. The essence of load balancing is to avoid congested nodes in route selection and distribute load reasonably in the presence of multipath routes. Forward packets through nodes with sufficient spare capacity to reduce existing and potential local congestion. Some intermediate nodes ignore their load status and directly forward packets after receiving them, which makes the load of heavier intermediate nodes not alleviated. This causes a large number of data packets to be discarded, increasing the average end-to-end delay and packet loss rate. Therefore, the unbalanced flow distribution will cause the heavy load node to run out of power quickly and die. With the increasing number of dead nodes, the connectivity of the network will rapidly decline and network fragmentation will occur, eventually leading to the failure of routing requests and data transmission. To solve the problem of network congestion in AODV routing, many scholars have studied load-balancing routing based on the on-demand routing protocol. Existing load-balancing routing protocols are divided into multi-path routing protocols and alternative path routing protocols according to routing and traffic distribution methods [
16].
Multipath routing protocols take certain measures to allocate network traffic to multiple routes for transmission and distribute data traffic through multiple paths to ensure that all paths are fully utilized to achieve load balancing and improve network performance. Jiang Z et al. proposed a substream routing algorithm with load and shared bottleneck awareness [
17], which selects routes for new substreams according to the available bandwidth of each route and avoids bottlenecks of other substreams. Experiments show that the proposed scheme can achieve higher system throughput. Du P et al. used multipath TCP (MPTCP) in the low-orbit satellite system and proposed a routing design framework based on MPTCP [
18]. Simulation results show that compared with single-path TCP, MPTCP significantly improves throughput performance and prevents data transmission interruption caused by satellite switching. Liu Peilong et al. designed a mutually exclusive multipath routing algorithm [
19], which sets track spokespersons through which real-time link state is collected and exchanged. Then, according to the topology of the whole network, multiple optimal paths of the local satellite and the cooperative satellite are calculated, so that the data can achieve traffic balance in the transmission process, so as to enhance the real-time downlink data transmission capability of the satellite. To improve the throughput of satellite networks, Tang F et al. proposed a multi-path cooperative routing algorithm based on source and destination nodes, which dynamically and cooperatively transmits different parts of the data stream along the disjoint paths of multiple links. In addition, an efficient No-Stop-Wait ACK mechanism is designed to accelerate data transmission [
20]. Alternative path routing protocol is an alternate routing protocol that is often used to achieve redundancy and high availability. This type of protocol provides multiple alternate paths. When the primary path fails, you can switch to the alternate path to ensure connectivity. Werner M et al. proposed an alternate link-based routing and forwarding policy [
21], which diverts traffic from the shortest path to the alternate shortest path to achieve load balancing.
Based on the above discussion, it can be seen that table-driven routing protocols usually require more network resources and bandwidth to maintain routing tables, while on-demand routing protocols may introduce a certain delay when routing updates. Load fluctuations and unevenness in satellite communications can lead to degraded network performance, such as increased latency, packet loss, and congestion. However, traffic prediction can be used to achieve load balancing by redirecting traffic to a path with more available bandwidth [
22]. At the same time, it can also be used for fault tolerance, ensuring that even if some paths fail, packets will still be transmitted according to the optimal path. At present, there is some research on satellite network routing based on traffic prediction. The literature [
5] captures the spatiotemporal correlation of satellite network traffic to predict the future network state and designs routing strategies based on the load levels of neighboring satellites. To improve the accuracy of traffic prediction, the literature [
23] improved the Gated Recurrent Unit (GRU) neural network to more effectively analyze the self-similarity and long correlation between data series by introducing an attention mechanism, to improve the prediction accuracy. In addition, the Particle Swarm Optimization (PSO) algorithm is introduced to automatically obtain the best neural network model hyperparameters, thus improving the prediction efficiency.
3. Overall Structure of G-AODV Routing Protocol
To achieve load balancing, this paper improves the original AODV routing protocol, introduces the traffic prediction mechanism, and proposes the G-AODV routing protocol. The protocol is divided into two key stages in route management: route discovery and route maintenance.
In the route discovery phase, G-AODV incorporates a traffic prediction mechanism to estimate the traffic load of the satellite network at the next moment. Set the network load threshold based on the actual traffic values and predicted values of all neighbor nodes. The transmission control mechanism of the request packet RREQ and the path switching strategy are determined by comparing the prediction value with the threshold. Through this mechanism, the system can detect the load of network nodes in time before the arrival of congested nodes. In this way, the overloaded nodes are avoided, and the routes are updated in time to ensure the load balance of the network. In the stage of route maintenance, the G-AODV routing protocol introduces an intelligent route repair method to solve the problem of path breakage. This mechanism will evaluate the stability of nodes and select different nodes according to the stability of nodes to complete the path repair process. This intelligent route repair method helps to improve the stability of the repaired path, thus enhancing the robustness and performance of the satellite network.
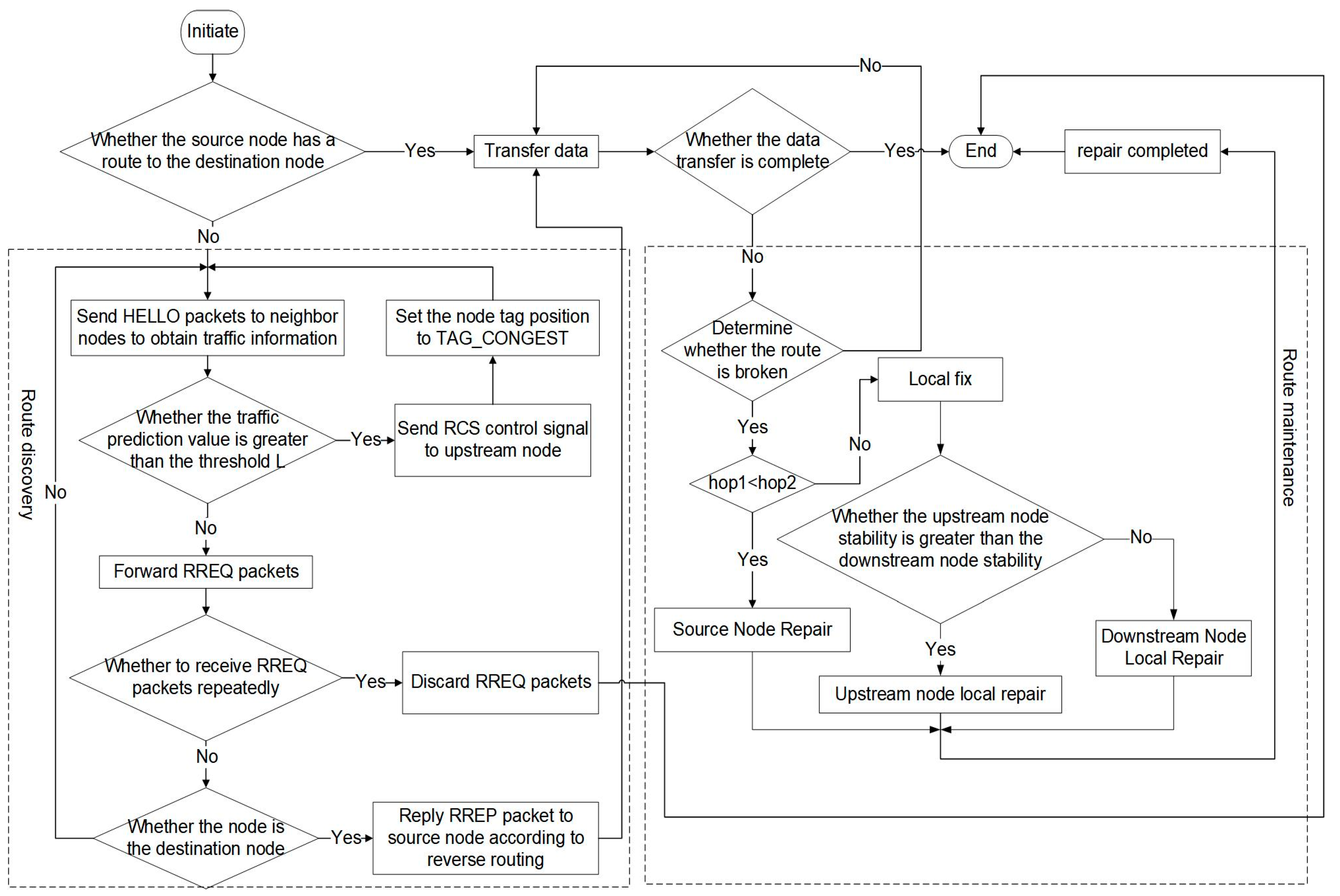
The overall structure of the G-AODV routing protocol is shown in
Figure 1. It combines route discovery and route maintenance to provide a satellite network with better load balancing and route management capabilities, thus enhancing its performance and reliability.
4. Route Discovery
In the route discovery phase, the G-AODV routing protocol uses the forward control mechanism and the path replacement mechanism to select the appropriate route effectively. The synergy of this dual mechanism is designed to ensure that heavy load nodes do not appear in the path of the build. At the same time, the network load is evenly distributed to avoid network congestion caused by excessive concentration of network traffic on certain nodes. Traffic load balancing is achieved by ensuring that each satellite node actively sends a congestion control signal to the upstream node after detecting a potential congestion node. Once the upstream node receives this signal, it re-evaluates the available neighbor nodes and selects a forward path for routing the request packet RREQ. This means that congestion-aware nodes avoid congested nodes, ensuring that data traffic can bypass areas that are already overloaded. This can effectively spread the network load and reduce the risk of congestion.
4.1. Forwarding Control Mechanism
Each satellite node sends HELLO packets to the neighbor node to detect the current traffic value and the predicted traffic value. The load threshold is set based on the obtained traffic value. The routing request packet is forwarded based on the comparison between the predicted node traffic value and the load threshold.
In the context of the existing limitations in satellite network traffic prediction methods, which fail to fully exploit the long-range correlations among data, resulting in significant forecasting errors and low prediction accuracy, the literature [
23] proposes an innovative satellite network traffic prediction strategy based on an improved Gated Recurrent Unit (GRU) neural network. This forecasting method cleverly integrates attention mechanisms with the GRU neural network to more comprehensively capture the relationships and hidden states among traffic data sequences, thereby significantly improving prediction accuracy. To further optimize model performance, a Particle Swarm Optimization (PSO) algorithm is introduced for determining the optimal combination of hyperparameters. Through the sophisticated adjustments made by this algorithm, the model ensures higher prediction efficiency and better generalization performance in traffic prediction tasks. Under simulated satellite network conditions, extensive simulation validations demonstrate that this prediction method exhibits excellent predictive performance and high accuracy in dynamic network environments. The effectiveness of the proposed approach is theoretically substantiated. This innovative satellite network traffic prediction strategy provides robust support for future satellite communication systems in terms of traffic management.
Based on the current traffic value
, each satellite node utilizes the traffic prediction model from the literature [
23] to forecast the traffic value
for the next time step. In the G-AODV protocol, individual satellite nodes broadcast HELLO packets to neighboring nodes to probe the network traffic load in their vicinity. The G-AODV routing protocol necessitates the allocation of new storage space
in the HELLO packets of the original AODV. This space is designated for storing the anticipated network traffic values of the satellite nodes for the next time step. Each node then incorporates this value into its neighbor list. The improved HELLO package structure is shown in
Table 2.
The actual traffic values of neighboring nodes directly influence the current load state of the intermediate node, while traffic prediction values provide an estimate of future load trends. To more accurately reflect the actual load conditions of the intermediate node, it is necessary to set a traffic threshold by combining the current traffic values and traffic prediction values. The traffic threshold
is defined based on the arithmetic average of the actual traffic values and prediction values of all neighboring nodes in the neighbor list. The calculation of the traffic threshold
is as follows:
In the formula, represents the current traffic load value of the satellite node , represents the predicted traffic load value of the satellite node , and represents the number of neighbor nodes of the satellite node .
Compare the node traffic prediction value with the network traffic threshold
. If the traffic prediction value
is less than the network traffic threshold
, the RREQ packet is forwarded; otherwise, a congestion control signal is sent to the upstream node, and the upstream node performs path replacement at the same time.
4.2. Implementation of Path Replacement Mechanism
The G-AODV protocol uses a path replacement mechanism to avoid heavy-load nodes in the path. The G-AODV protocol adds routing congestion status (TAG_CONGEST) and congestion control signal (RCS) based on the original AODV routing protocol. The congestion control signal RCS contains relevant information about the source node and the destination node. The upstream node will use this information to reselect neighbor nodes to forward the routing request packet. If the satellite node receives the congestion control signal, it will reselect the neighbor node to change the route for sending the route request packet.
The structure of the congestion control signal RCS packet is shown in
Table 3.
The satellite node sends a congestion control signal to inform the upstream node that its downstream node may become a congested node and therefore cannot accept new business traffic. After the downstream node constructs a congestion control signal and sends it out, it sets the routing status in the routing table to the TAG_CONGEST status. In the route congestion state, the upstream node will cache the data packets sent to the downstream node, and the downstream node will not accept any RREQ packets. Therefore, the downstream nodes have enough time to relieve their heavy load conditions. If the congestion condition of the downstream node is relieved, it will continue to receive RREQ messages.
After receiving the congestion control signal, the upstream node caches the data packets of the route, extracts the relevant information of the destination node and source node in the congestion control signal, and sends an RREQ request to the neighbor node.
The G-AODV route discovery process is shown in
Table 4.
5. Route Maintenance
Due to the complex working environment of satellite networks, the instability of interstellar link connections often causes routing failure problems, including routing failure or becoming unavailable. This unstable connection can cause the router to choose unstable paths and ignore more stable connections. To solve this problem, the G-AODV routing protocol introduces an effective route maintenance and repair mechanism. During the maintenance phase of the traditional AODV routing algorithm, routers usually try to repair broken routes locally, which can improve overall network performance to some extent. However, when the upstream node at the interruption is moving, local repair by the broken node may cause the route to be interrupted again, reducing the reliability and stability of the route. Therefore, G-AODV introduces the concept of “node stability”. In the route maintenance phase, a route repair strategy based on node stability is used to repair routes.
In the G-AODV protocol, once a transmission path is established, the path enters the routing maintenance phase. Different from the original AODV, G-AODV uses an intelligent route repair mechanism to solve the problem of broken routes based on node stability. This mechanism selects appropriate nodes for source node repair or local repair by judging the fracture location. By comparing the stability of the upstream and downstream nodes at the break location, G-AODV can more wisely choose the node to repair the route, thereby reducing the risk of new routes being interrupted again.
5.1. Improvement of the Routing Table
To determine the route repair method at the break, the G-AODV protocol needs to improve the routing table. In the routing table, add four fields: hop count, number of hops required to reach the destination node, next two-hop nodes and upper two-hop node. The improved routing table is shown in
Table 5. Compared with the original routing table, 16 bytes of data are added to the improved routing table. The data packets transmitted per second increase the bandwidth by up to
, where
is the packet transmission rate (packets/s).
5.2. Route Repair Method
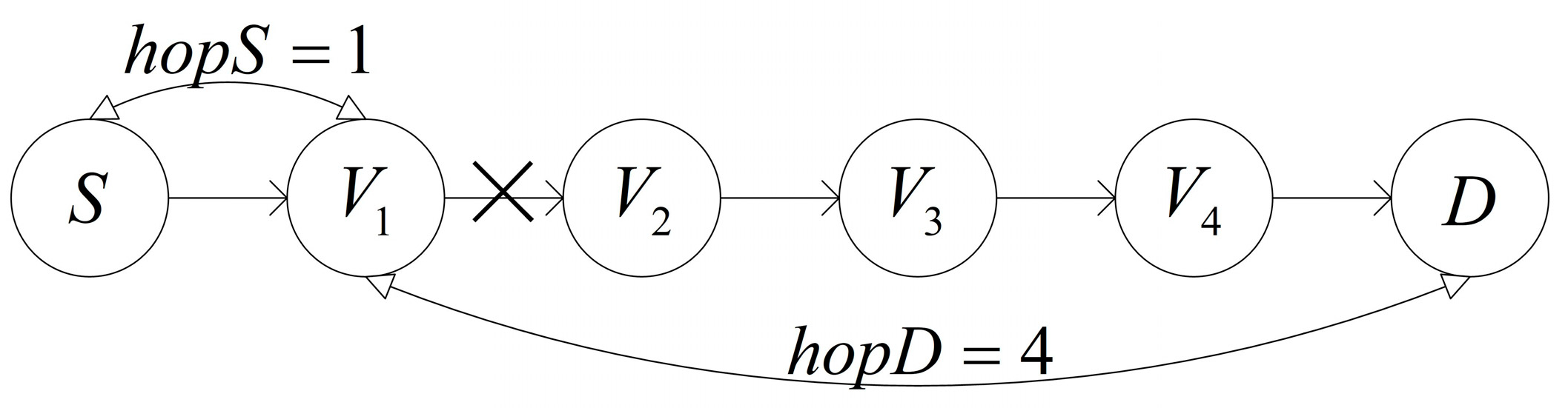
When a link breaks, routing needs to be repaired to ensure continued smooth communication. After the link is broken, the broken node obtains and from the routing table. is the current hop count value, that is, the number of hops that the current data packet has experienced from the source node to the break node. is the number of hops required from the broken node to the destination node. By comparing and , select the corresponding route repair method. Route repair methods are divided into source node repair and local repair.
- (1)
Source node repair
As shown in
Figure 2, when
, the source node repair is used for route repair at the fracture point. At this point, the fracture location is relatively close to the source node, and using source node repair can quickly establish the optimal path. This repair method can reduce the increased latency caused by complex local repair judgments and reduce routing overhead.
- (2)
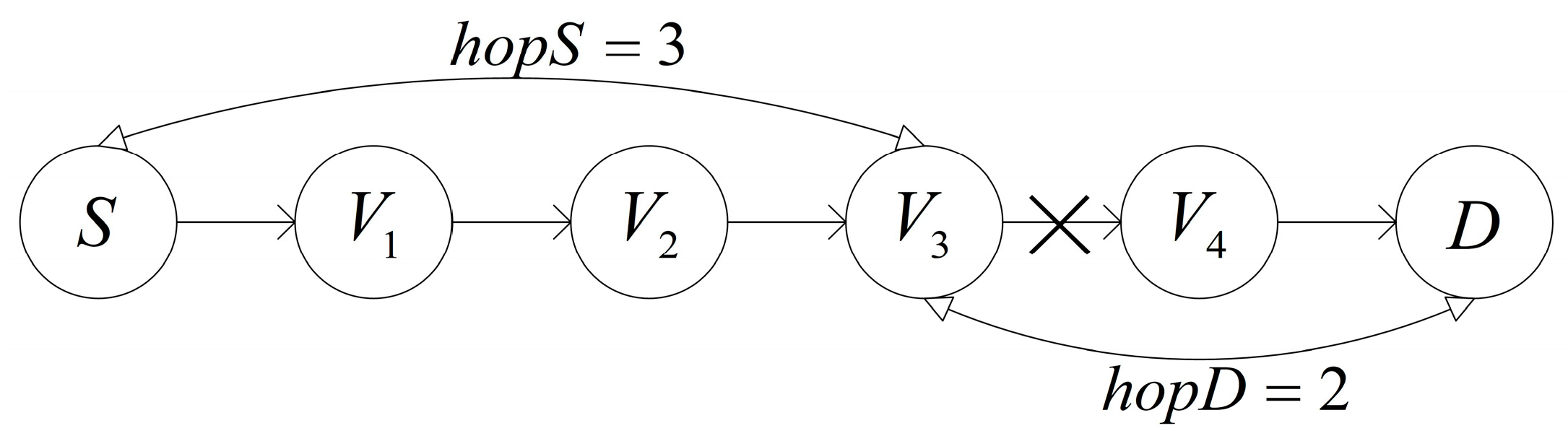
Local repair
As shown in
Figure 3, when
, local repair is used to repair the route at the break. At this time, the fracture location is far away from the source node, so local repair can be used to establish the optimal path faster.
5.3. Node Stability
Having multiple neighboring nodes can provide redundant paths, thereby enhancing the stability of the network in the event of link failures. When the primary link experiences a fault or interruption, nodes can still communicate with other nodes using alternate paths. The existence of these redundant paths makes the network more resilient, enabling it to better adapt to changes and failures in the links. Having multiple neighboring nodes increases the communication opportunities for a node, as each neighbor can be considered a potential communication path. Consequently, the connections between nodes become more stable, reducing the impact of a single point of failure on network accessibility. Therefore, the stability of a node can be reflected by the number of neighboring nodes, indicating the density of connections and accessibility in the network.
Assuming that the number of satellite nodes is , the satellite network topology at moment can be represented by . Where constitutes a node set, is the source node, , is the destination node, and . forms the set of links at moment. If there is an edge between node and node at time , then node is the neighbor node of node , and all the neighbor nodes of node form the neighbor set of node , denoted .
Suppose the neighbor set of the node
at time
is
, and the neighbor set of the node
at time
is
. Then, the stability of the node
is:
in Formula (3) reflects the stability of the node
. Among the one-hop nodes adjacent to a node
, the higher the
, the more neighbor nodes remain connected to the node
, and the more stable the node
is considered. On the contrary, it means that the fewer neighbor nodes that remain connected to the node, the higher the probability of the node breaking. In this paper, the time interval for calculating node stability is set as the survival time of the link after the node receives the HELLO message sent by the neighbor node.
5.4. Remote Maintenance Process
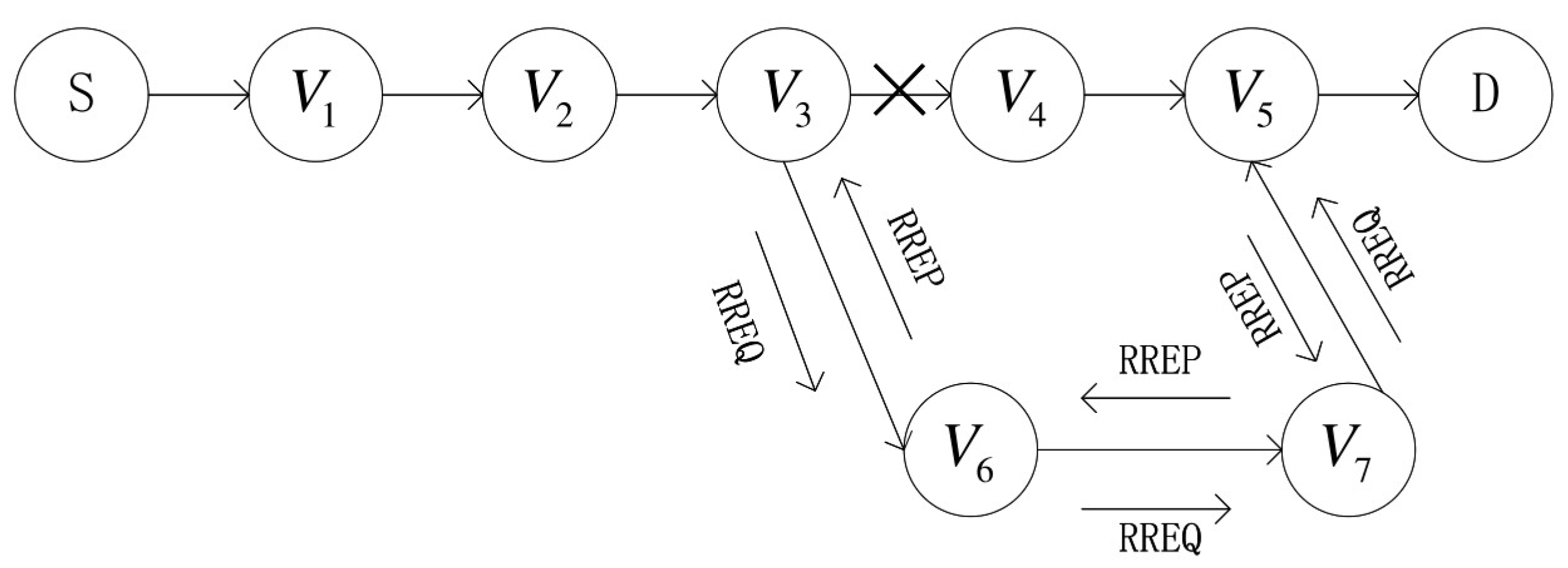
Determine the route repair method based on the location of the break. Select the corresponding node for local repair based on the stability of the upstream and downstream nodes. If the stability of the upstream node at the break is greater than that of the downstream node, the upstream node initiates the route local repair process. Otherwise, the downstream node initiates the route local repair process.
- (1)
The upstream node initiates the local repair process:
As shown in
Figure 4, the link between node
and node
is broken; hence, data packets will not traverse the route from
to
. When the stability of node
is higher than that of node
, the upstream node
initiates a local repair. At this moment, node
is searching for the next two-hop nodes in its routing table, specifically
. As long as a route from
to
is identified, the route can be restored. Node
sends an RREQ packet to
through its neighbor node
. After receiving the RREQ packet, node
replies with an RREP packet to
. If node
receives the RREP, it means that the local route repair is completed. The repaired path is:
. The repair path in
Figure 4 is just one example; the route repair may also involve a route through node
.
- (2)
The downstream node initiates the local repair process:
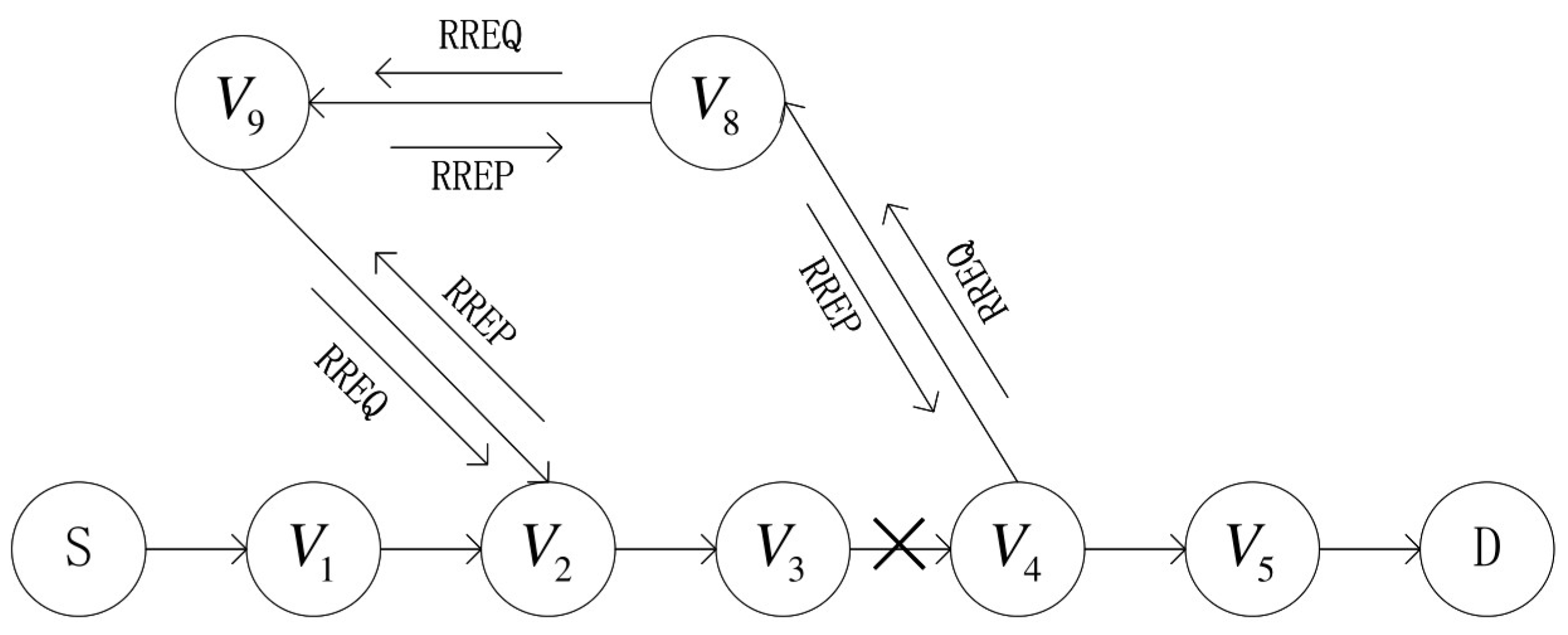
As shown in
Figure 5, the link between node
and node
is broken; hence, data packets will not traverse the route from
to
. When the stability of node
is higher than that of node
, the downstream node
initiates a local repair. At this moment, node
is searching for the previous two-hop nodes in its routing table, specifically
. As long as a route from
to
is found, the route can be restored.
sends an RREQ request packet to node
through neighbor node
. Node
sends a response packet RREP back to node
. If
receives the RREP packet, it means that the local route repair is completed. The repaired path is:
. The repair path in
Figure 5 is just one instance; the route repair may also involve a route through node
.
The G-AODV route maintenance process is shown in
Table 6.
6. Simulation Analysis
This article uses STK (Satellite Tool Kit) to build simulated Iridium constellation data. Build a satellite network simulation model in NS2 (Network Simulator Version 2) to analyze the effectiveness and feasibility of applying the improved routing algorithm to satellite networks. Referring to the parameter setting requirements of the literature [
24] and STK, the simulation parameters used in this article are shown in
Table 7.
6.1. Routing Performance Evaluation Indicators
The packet delivery rate measures the probability of a packet successfully reaching its destination. End-to-end delay reflects the transmission delay of data packets from source to destination. The packet loss rate indicates whether data packets are lost during transmission. This article combines these three indicators to evaluate routing performance from multiple aspects.
- (1)
Packet delivery rate
The packet delivery rate can effectively reflect the maximum throughput of the network. The calculation expression is:
In Formula (4), represents the data packets that successfully reach the destination node, and represents the total number of data packets sent from the source node.
- (2)
Average end-to-end delay
The average end-to-end delay is the average of the total delay of all data packets from leaving the source node to arriving at the destination node, which reflects the speed of data packet transmission on the network and the effectiveness of the link. The calculation expression is:
In Formula (5), represents the number of successfully transmitted data packets, represents the time when the i-th packet reaches the destination node, and represents the sending time of the i-th packet.
- (3)
Packet loss rate
Packet loss rate defines the percentage of data packets that are not successfully received by the destination node. During the operation of the entire network, some data packets will be lost due to network congestion, route breaks and other reasons. The packet loss rate reflects the reliability of network transmission very well. The lower the packet loss rate of data packets, the higher the reliability of the network.
In Formula (6), represents the number of lost data packets, and represents the total number of data packets sent from the source node.
6.2. Simulation Scenario
The literature [
25] proposes a simple and efficient Enhanced_AODV routing scheme (E-AODV), designed to enhance the performance of the AODV routing protocol by establishing the most stable and reliable route from the source node to the destination node. The literature [
26] introduces a reactive-based DSR (DS-DSR) approach, confirming its capability to consistently provide packet transmission. The literature [
27] suggests a Neighbor Coverage Multi-path DSDV (NCMDSDV) protocol as a measure to recover from link failures. This protocol can create multiple paths to the destination node, ensuring data integrity.
In scenarios with varying packet transmission rates and numbers of communication connections, we conducted comparative experiments on four strategies: G-AODV, E-AODV, DS-DSR, and NCMDSDV. This aims to provide more references and evaluations for the performance of the G-AODV protocol. Following the parameter settings required by the STK satellite network simulation tool, the operational speed of the satellite nodes is set to 7.9 km/s, equivalent to the first cosmic velocity. To simulate the motion status of satellite nodes in low orbit, a pause time of 0 s is set.
6.2.1. Scenario 1: Different Packet Forwarding Rates
- (1)
Packet delivery rate
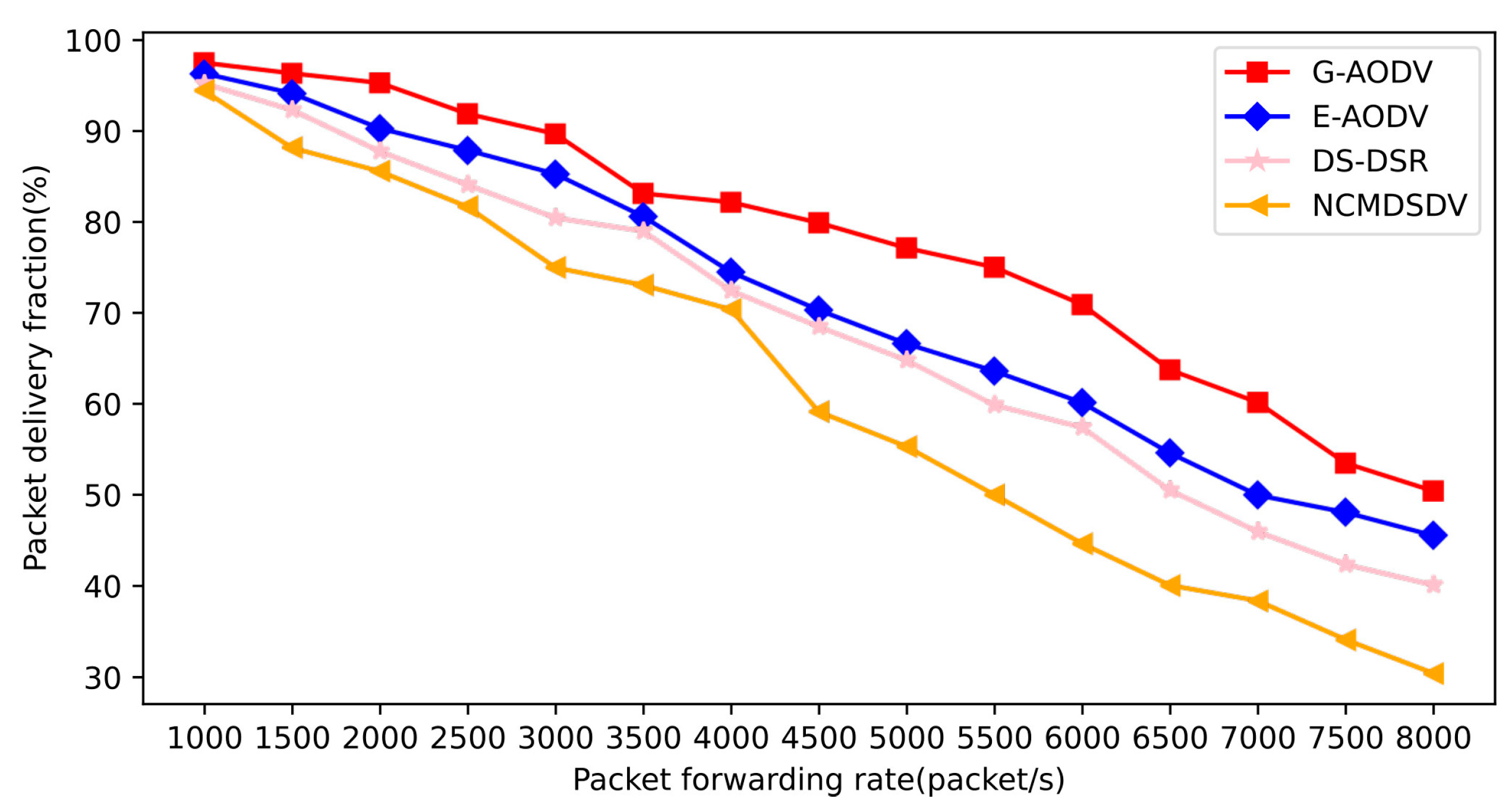
When the node’s packet forwarding rate is smaller, the load in the network is lower. This means that the average network throughput is higher, and therefore, the packet delivery rate is higher. As the packet forwarding rate of nodes gradually increases, the network load further increases. When the load approaches the maximum load value that the bandwidth resources in the network can carry, the network throughput begins to decrease, and the packet delivery rate also gradually decreases. At this time, the input and output buffers in the node are gradually filled up, and excess data packets are discarded because they cannot obtain more cache space or because the waiting time is too long.
As shown in
Figure 6, when the packet forwarding rate continues to increase, the total network load will increase. This affects the performance of the network and makes the packet delivery rate of the network low. The group delivery rate curves of these four strategies must also show a downward trend. G-AODV employs an innovative approach to alleviate this issue. Through a traffic prediction mechanism, G-AODV can forecast the traffic values of satellite nodes for the next moment in advance. This means that nodes with potential heavy load characteristics can proactively notify upstream nodes before reaching congestion, assisting in the selection of new paths. This strategy helps achieve load balancing, effectively enhancing network performance under heavy load conditions. Additionally, traditional protocols like E-AODV, DS-DSR, and NCMDSDV struggle to flexibly handle the forwarding direction of packets after a link is disconnected, resulting in packet stagnation at the broken node and eventual failure to deliver to the destination node. G-AODV, through its routing maintenance mechanism, ensures effective packet forwarding even after a link is disconnected. Compared to E-AODV, DS-DSR, and NCMDSDV, G-AODV demonstrates respective improvements in packet delivery rates by 10%, 12%, and 20%, respectively. This significant enhancement is attributed to the outstanding capabilities of G-AODV. Thus, G-AODV excels in addressing the continuously increasing packet transmission rate while maintaining a high packet delivery rate.
- (2)
Average end-to-end delay
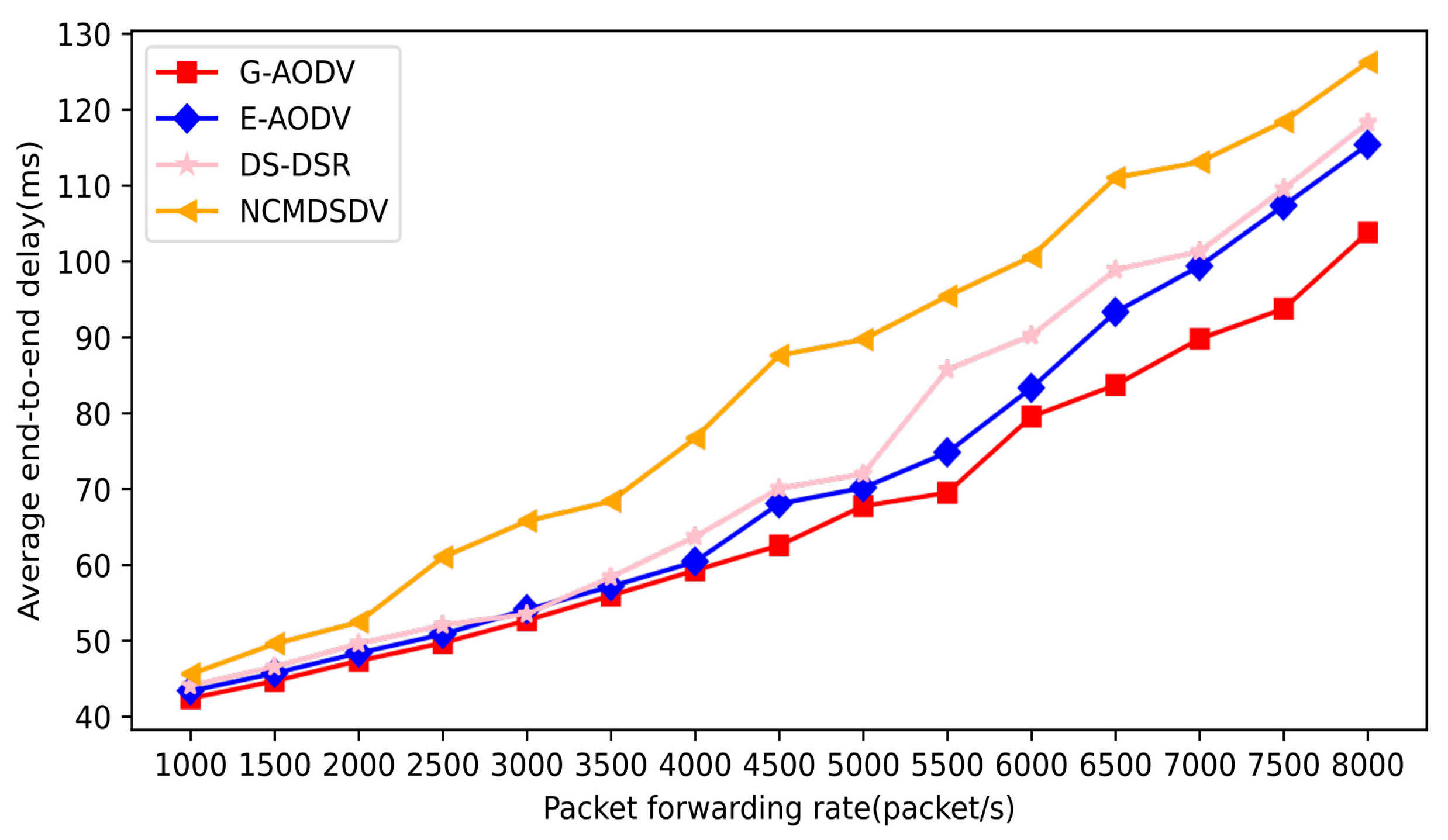
As shown in
Figure 7, as the packet forwarding rate increases to a certain level, the network may become congested. This means that the router starts receiving more packets, causing packets to be queued and waiting to be sent, thus increasing transmission latency. When congestion occurs, average latency increases significantly. Therefore, for these four protocols, the average end-to-end delay shows an upward trend. The G-AODV protocol not only considers the number of hops during the route establishment process, but also considers the load status information of the node. This protocol uses a forwarding control mechanism to prevent excessive data traffic from being directed to heavily loaded nodes, thereby alleviating the problem of increased latency caused by heavy loads. At the same time, the heavily loaded nodes get a certain amount of time to relieve their heavy load status, ensuring the smooth flow of the entire network. Considering the unstable connection of satellite links, the G-AODV protocol adopts a dual repair mechanism in the routing maintenance phase. This mechanism adjusts routing to quickly restore broken paths and avoid communication interruptions. Compared with E-AODV, DS-DSR, and NCMDSDV, the average end-to-end delay of G-AODV has been reduced.
- (3)
Packet loss rate
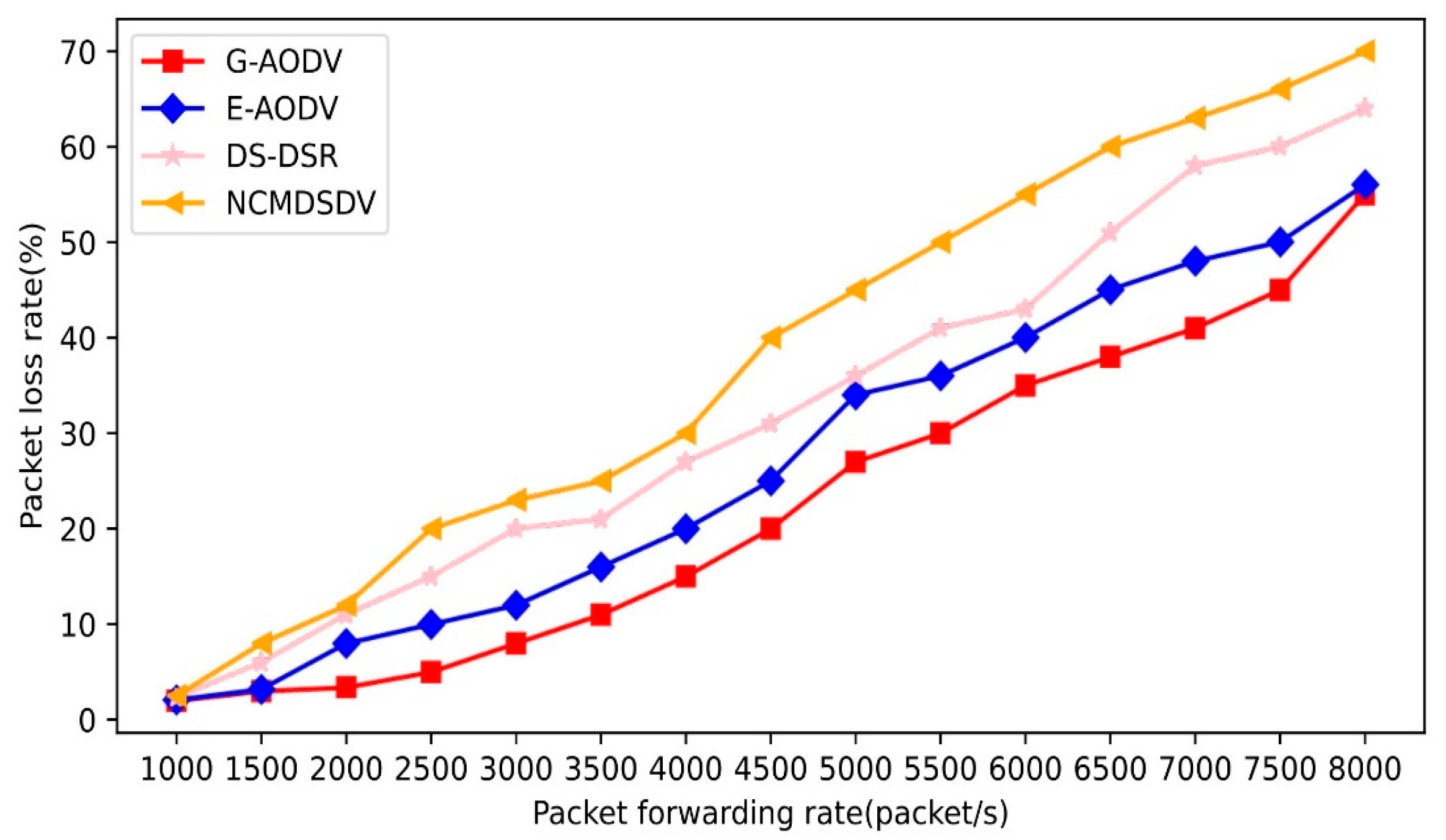
As shown in
Figure 8, when the packet forwarding rate is low, the network is relatively idle and can effectively process and transmit data packets, so the packet loss rate is low. As the packet forwarding rate increases, the network begins to be congested, resulting in an increasing packet loss rate. Therefore, as the packet delivery rate increases, the packet loss rate curves of the four strategies all show a linear upward trend. When the packet loss rate is high, it indicates that the network has exceeded its processing capacity and cannot effectively handle all incoming packets. It can be seen that the G-AODV strategy in the figure has the lowest packet loss rate, which is due to its ability to predict the future load status of the node. When a node may be in a heavily loaded state, the node sends a congestion signal to the upstream node, and the upstream node directs traffic to a lighter loaded node. This ensures that in a network environment with a large packet delivery rate, the node can adjust its own load status so that the data packet can find a smooth route to the destination node. Even after the link is broken, the node can adopt a maintenance mechanism to repair the route and ensure the link connection. This strategy controls the increase in packet loss rate to a certain extent. The simulation results show that as the packet forwarding rate increases, the packet loss rate of G-AODV is significantly lower than the comparison routing strategy. Compared with E-AODV, DS-DSR, and NCMDSDV, the packet loss rate of G-AODV is reduced by 5%, 19%, and 22%, respectively.
6.2.2. Scenario 2: Number of Different Communication Connections
The scheme proposed in this article is verified under the condition of different numbers of communication connection pairs. In this experiment, the node packet forwarding rate is set to 4500 packets/s, and simulation verification is performed when the number of communication connection pairs is 10, 20, 30, 40, 50, and 60.
- (1)
Packet delivery rate
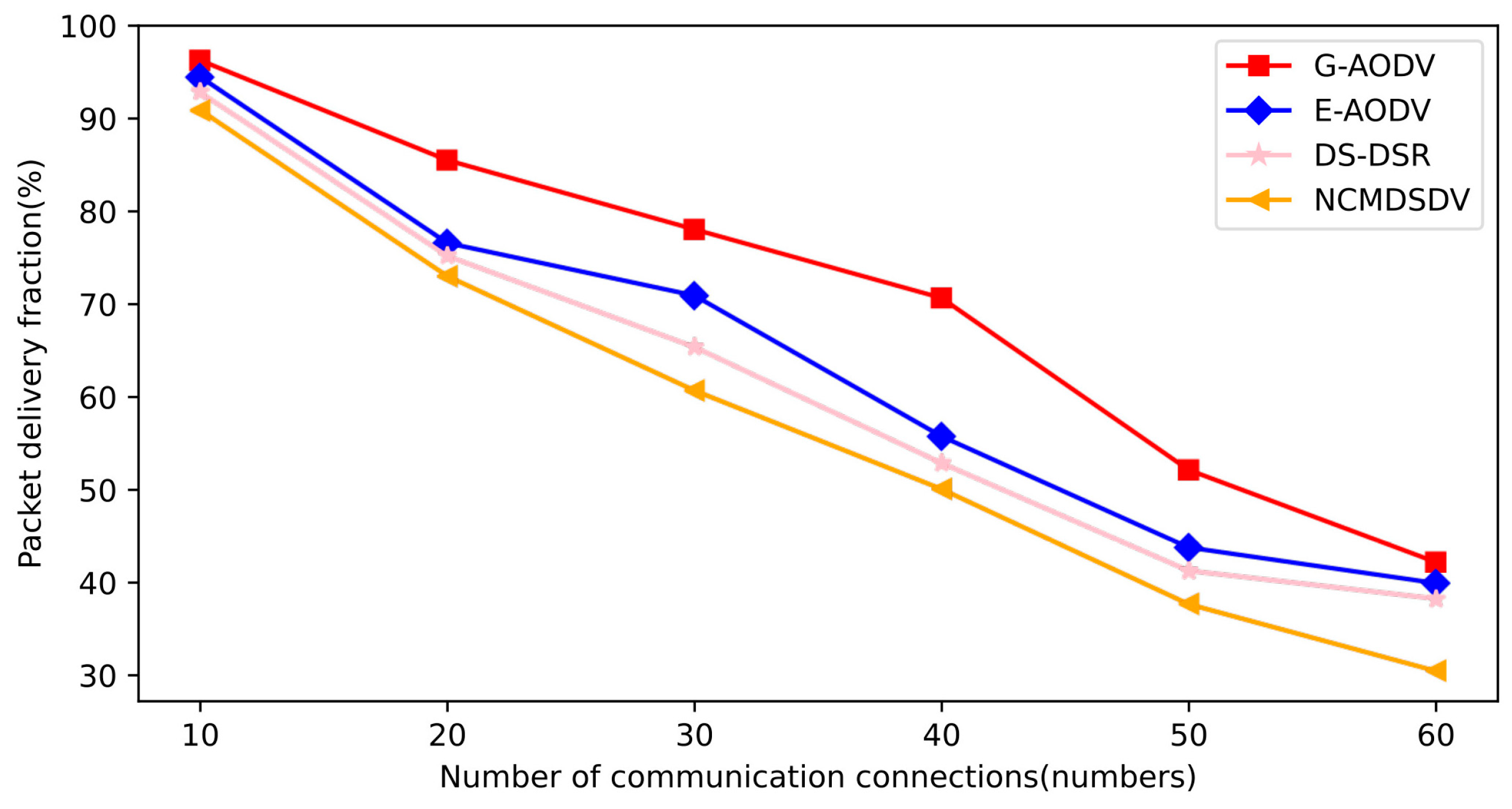
As shown in
Figure 9, as the number of communication connection pairs increases, it means that more data traffic is injected into the network. Therefore, the load on the network is further increased, resulting in packet loss and ultimately a decrease in the packet delivery rate of the routing protocol. G-AODV introduces a traffic prediction mechanism in the route discovery phase to predict congested nodes to the maximum extent. This avoids the addition of heavily loaded nodes, and the established routing path will not suffer from local overloading or massive packet loss. Compared with E-AODV, DS-DSR, and NCMDSDV, the packet delivery rate of G-AODV has increased by 15%, 18%, and 20%, respectively.
- (2)
Average end-to-end delay
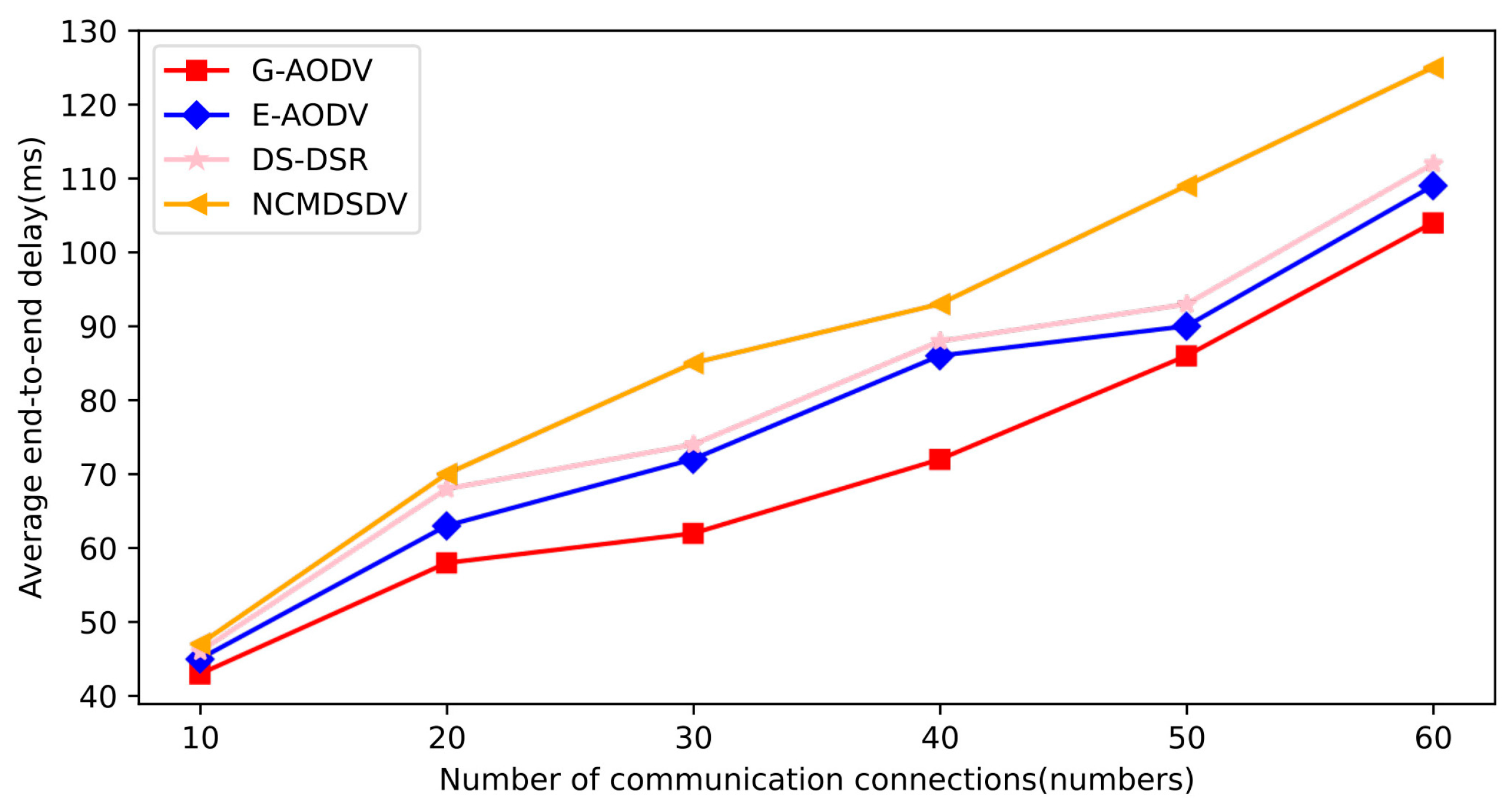
As shown in
Figure 10, as the number of communication connection pairs increases, the network load increases, so the average end-to-end delay of all routing protocols continues to increase. The G-AODV protocol selects the path with lighter load and aims to achieve load balancing. In a load-balanced network, network resources are allocated and managed efficiently to ensure that no node is overloaded. This means that the network can cope better with the load even as the number of communication connection pairs increases. Therefore, increasing the number of communication connections will introduce some additional delays, but these delays will be limited by effective load balancing. At the same time, the G-AODV protocol can quickly restore broken paths during the routing maintenance phase to ensure smooth communication. Compared with E-AODV, DS-DSR, and NCMDSDV, the average end-to-end delay of G-AODV has been reduced.
- (3)
Packet loss rate
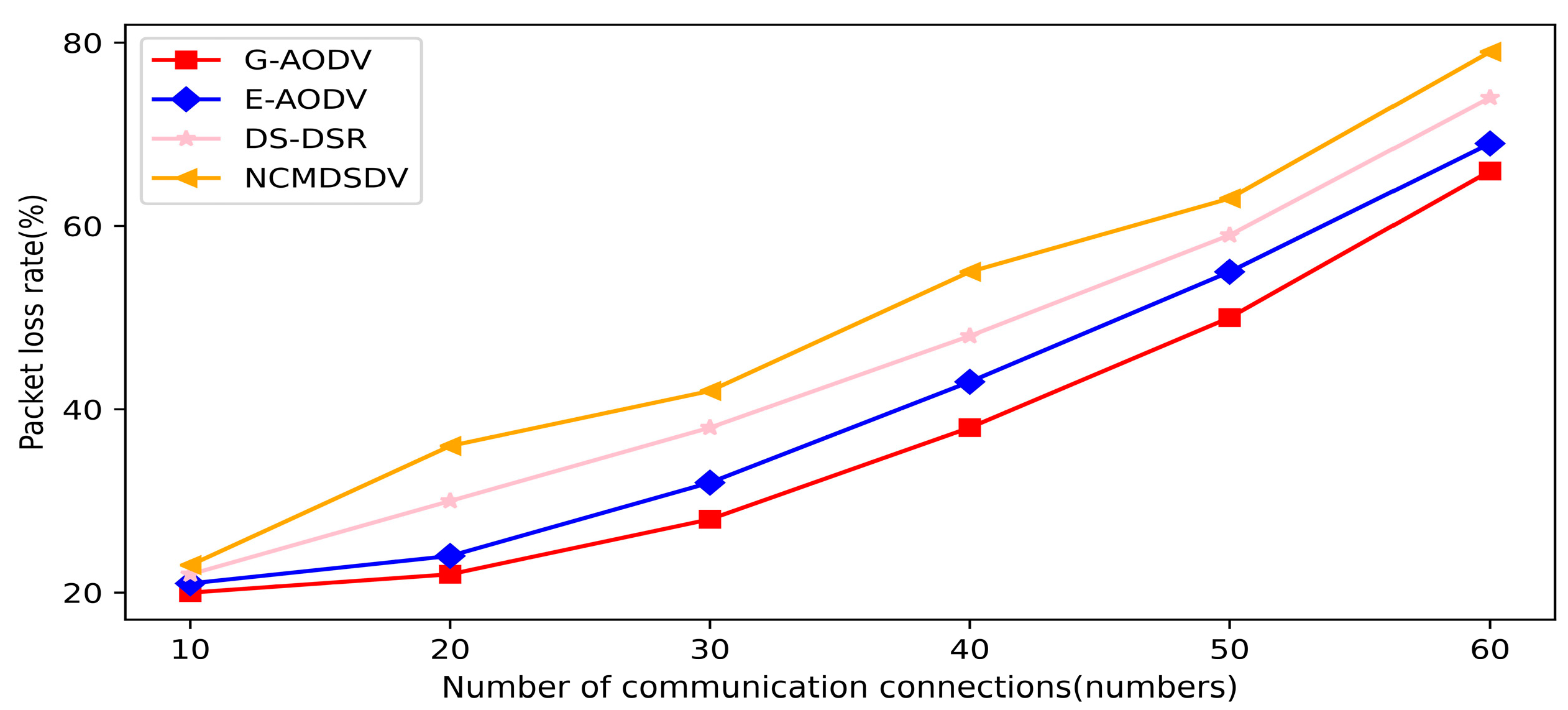
As shown in
Figure 11, when the number of communication connection pairs increases, the large number of connections may introduce more signal interference and link quality fluctuations. As a result, the probability of link failure in the network increases, eventually leading to the loss of data packets. Additionally, when the number of connections increases rapidly, data traffic increases and the network may struggle to cope, resulting in packet loss. On the basis of achieving load balancing, G-AODV provides a solution when the link is broken, that is, the route maintenance mechanism. After the link is broken, the route maintenance mechanism is immediately adopted to ensure the link connection, which controls the increase in packet loss rate to a certain extent. G-AODV uses node stability to select different satellite nodes for link repair, which can effectively prevent the increase in packet loss rate caused by secondary link breaks. The simulation results show that as the number of communication connection pairs increases, the packet loss rate of G-AODV is significantly lower than that of the comparative routing strategy. Compared with E-AODV, DS-DSR, and NCMDSDV, the packet loss rate of G-AODV is reduced by 4%, 10%, and 18%, respectively.
G-AODV relies on GRU and attention mechanisms to predict theoretical values for the future. The GRU model itself is relatively complex, comprising multiple gate units internally. With the introduction of attention mechanisms, the model can more effectively focus on crucial information, albeit at the cost of introducing additional parameters and computations, leading to a further increase in overall model complexity. In comparison to traditional protocols such as E-AODV, DS-DSR, and NCMDSDV, G-AODV exhibits higher complexity. Despite the increased complexity, G-AODV demonstrates significant performance improvement through careful design and the use of popular PSO algorithms. While its complexity is higher, the performance enhancement provides robust support for traffic management in satellite networks, showcasing excellent performance under heavy loads and unstable network conditions. Generally, as the scale of satellite networks increases, routing algorithms often require a greater number of iterations to adapt to the complexity of the network. Throughout the simulation experiments, we closely monitored the convergence performance of the G-AODV algorithm within the context of large-scale satellite networks. After 280 iterations, the algorithm successfully achieved a satisfactory convergence state.
7. Summary
Aiming at the problems of satellite network load imbalance and unstable link connections, this paper proposes a satellite network routing strategy based on traffic prediction (G-AODV). To achieve load balancing, G-AODV introduces a traffic prediction mechanism in the route discovery phase and uses a neural network model to predict the traffic load at the next moment. A forwarding control strategy is adopted based on the comparison between the traffic prediction value at the next moment and the dynamic threshold, thus preventing the heavily loaded node from becoming an intermediate node. This method prevents a large number of nodes from becoming heavily loaded nodes and thus avoids the possibility of bringing down the entire network. At the same time, paths are changed in advance before node congestion occurs, and data traffic is directed to low-load nodes by setting congestion signals. Considering the dynamics of satellite nodes and the instability characteristics of links, during the route maintenance stage, the route repair method is selected by judging the node stability, that is, local repair or source node repair. Through extensive simulation experiments, we have drawn the following conclusions: in scenarios with varying packet transmission rates, G-AODV demonstrates a significant performance advantage over three other routing strategies, namely E-AODV, DSDSR, and NCMDSDV. The packet delivery rate of G-AODV improves by up to 20%, with a reduction in packet loss of 22%, and a noticeable decrease in end-to-end latency. In scenarios with different numbers of communication connections, G-AODV continues to exhibit a substantial improvement in packet delivery rates by up to 20%, a decrease in packet loss of 18%, and a sustained reduction in end-to-end latency. The consistency of these experimental results and the significance of performance improvement further emphasize the superior routing performance of G-AODV in actual satellite network environments. These observed outcomes not only support our conclusions quantitatively but also provide robust statistical evidence for our experiments, enhancing the persuasiveness of our claims regarding the performance enhancement of G-AODV.
After simulation verification, this method has greatly improved performance, but it also has some limitations. In real-time applications, such as video communications or emergency communications, routing decisions based on traffic prediction may introduce some additional delays. These additional delays can negatively impact user experience. Additionally, using neural networks for traffic prediction may require substantial energy and computing resources, especially in satellite networks with a large number of nodes and limited resources. It should be noted that the satellite network topology changes frequently, including the addition and departure of nodes, the interruption of links, etc. In this case, the predictive model needs to be adjusted in time to adapt to changes, otherwise its accuracy will be affected.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}