
An Integrated Motion Planning Scheme for Safe Autonomous Vehicles in Highly Dynamic Environments


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
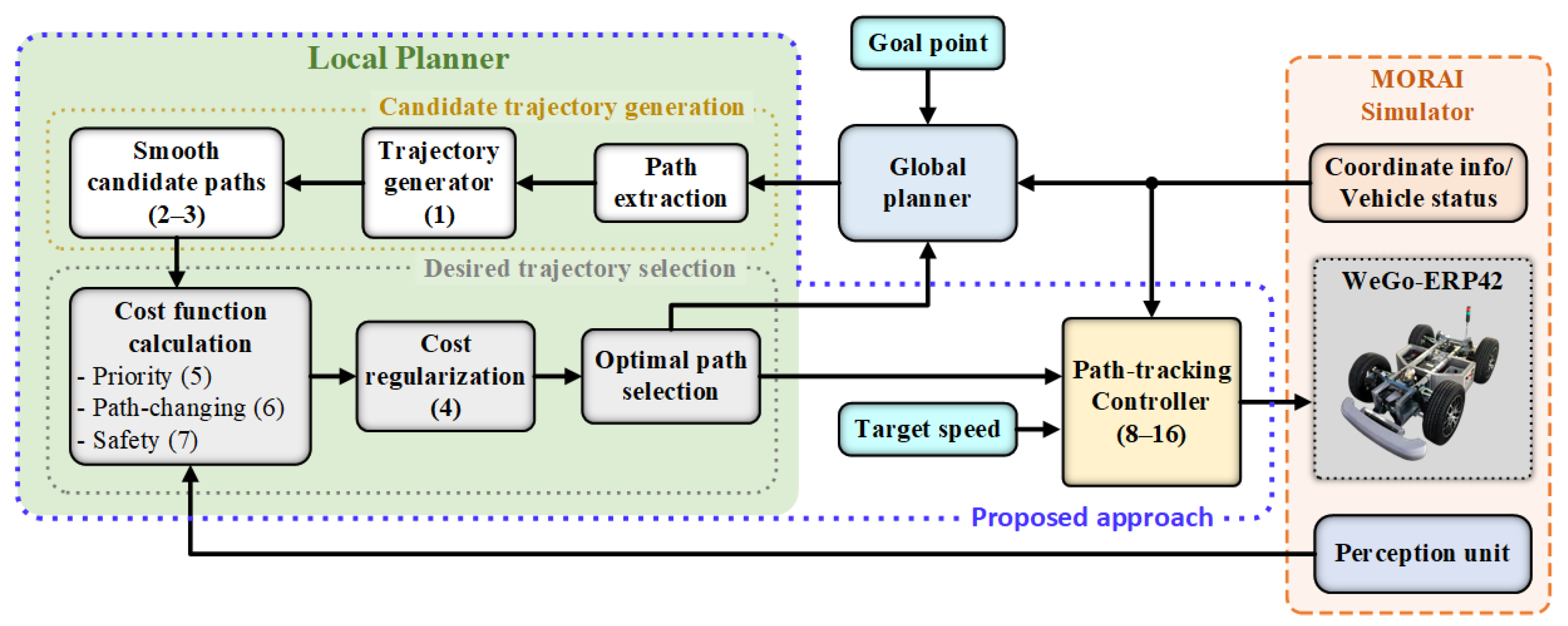
2. Proposed Approach
2.1. Local Planning
2.1.1. Candidate Trajectory Generation
2.1.2. Desired Trajectory Selection
2.2. Path-Tracking Approach
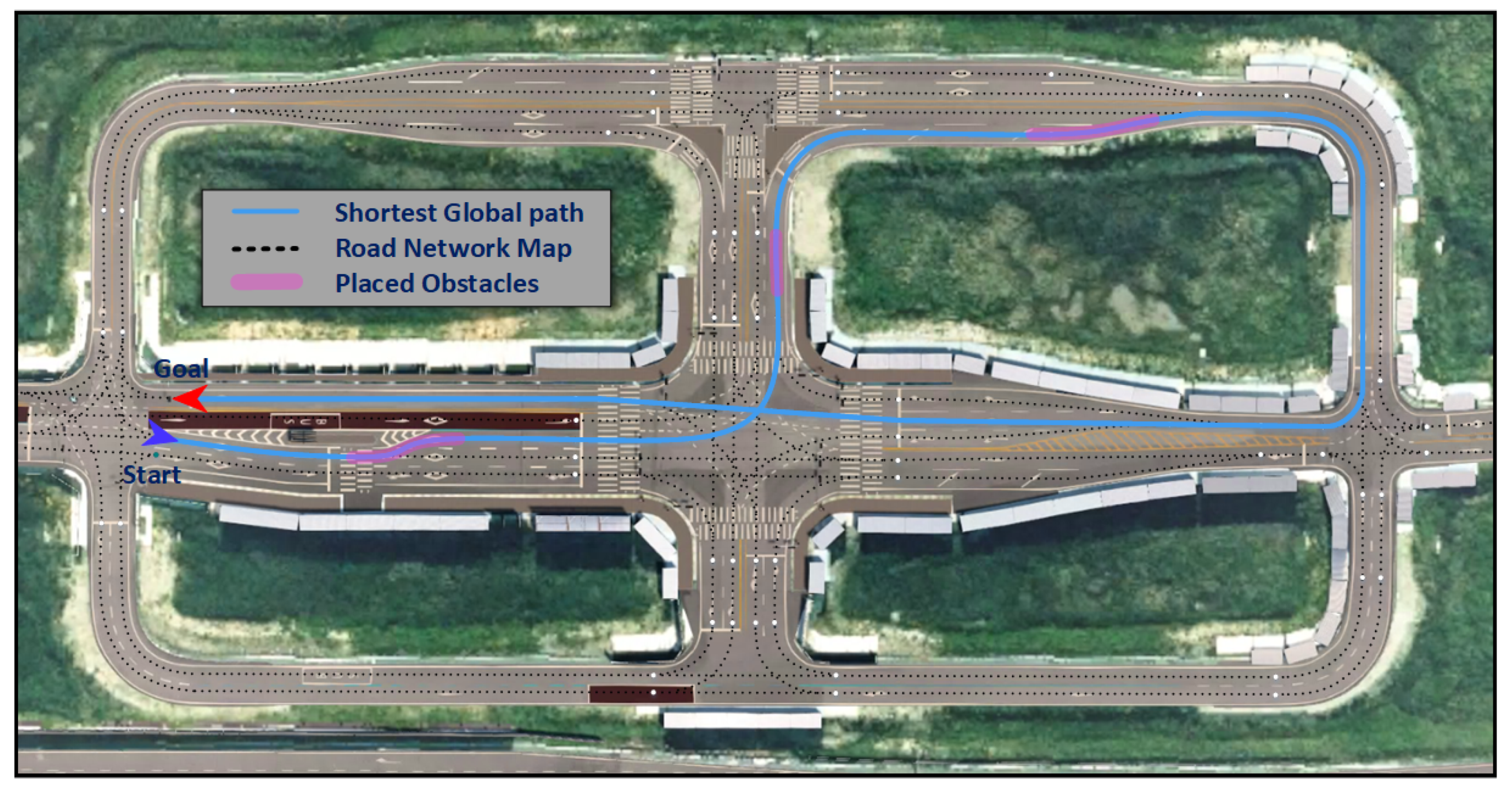
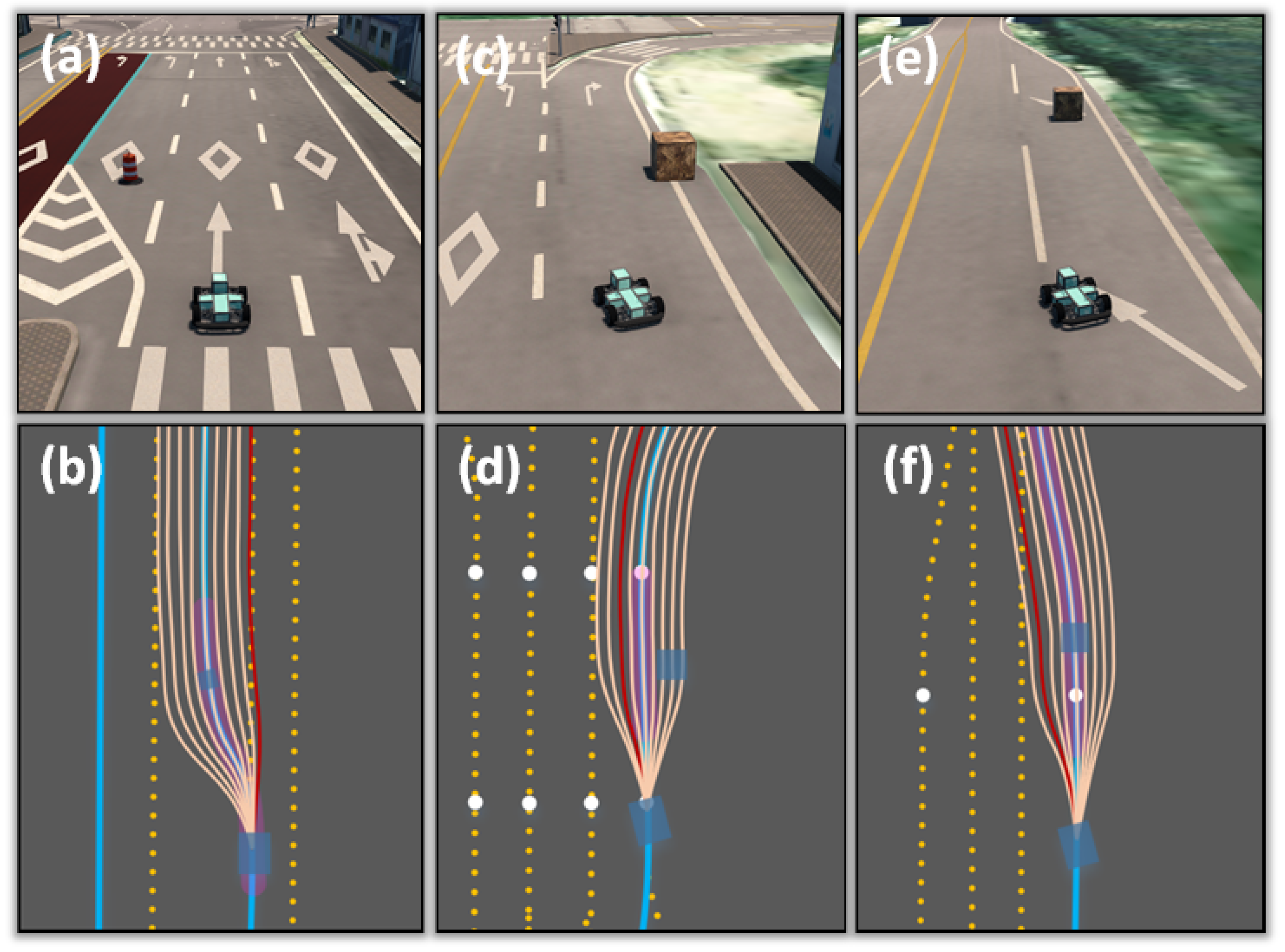
3. Simulation Validation
3.1. Environment Setup
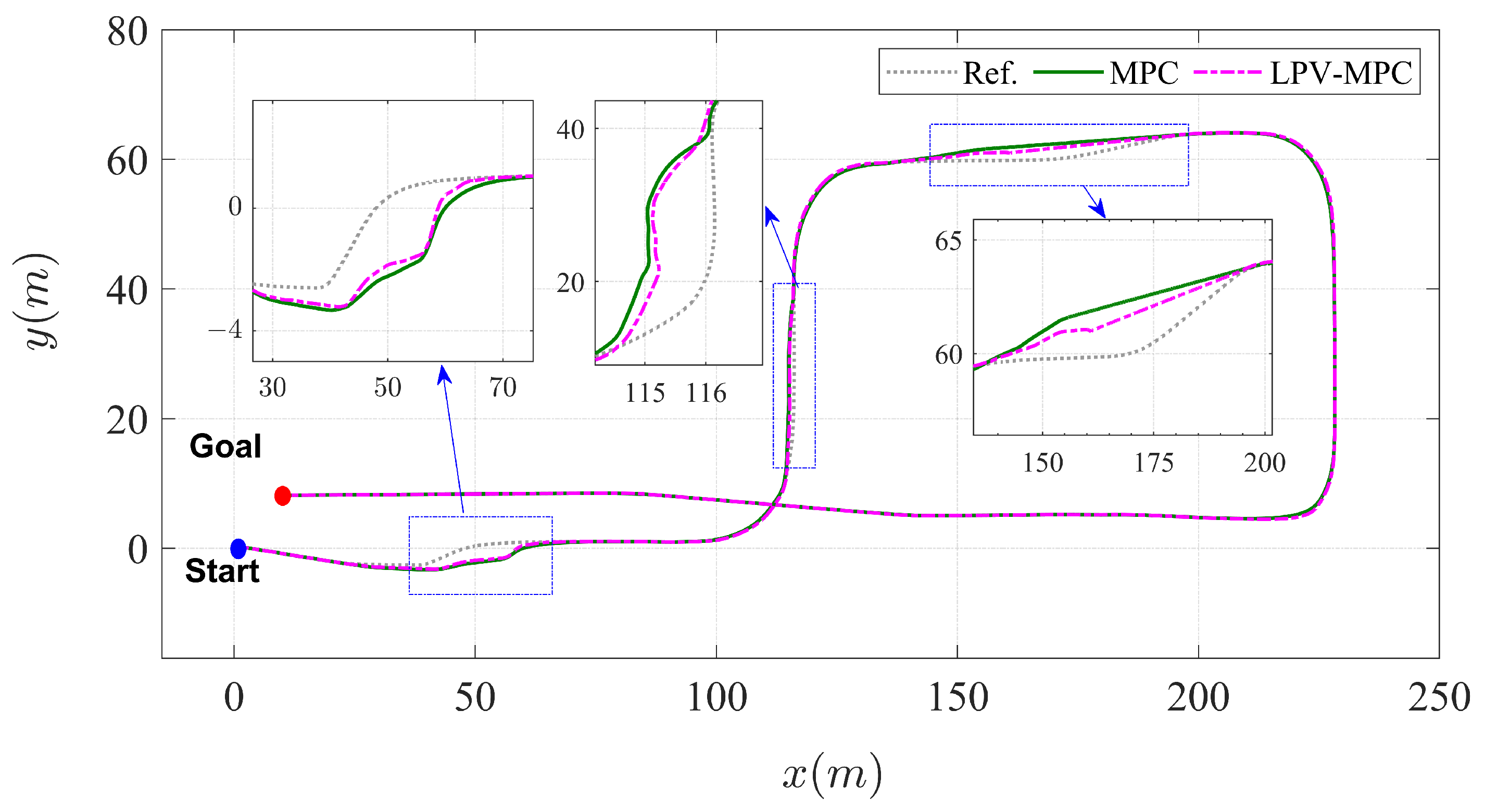
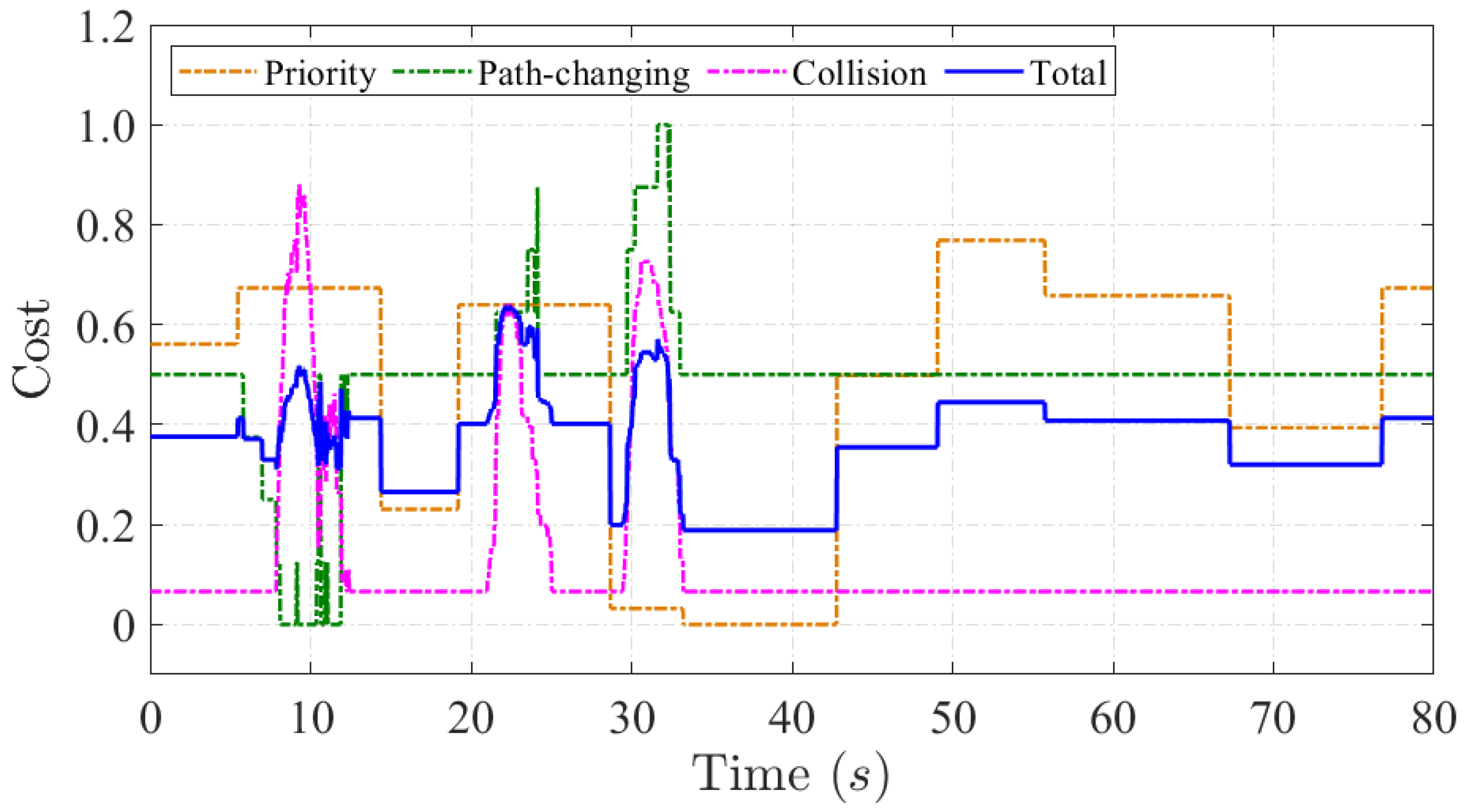
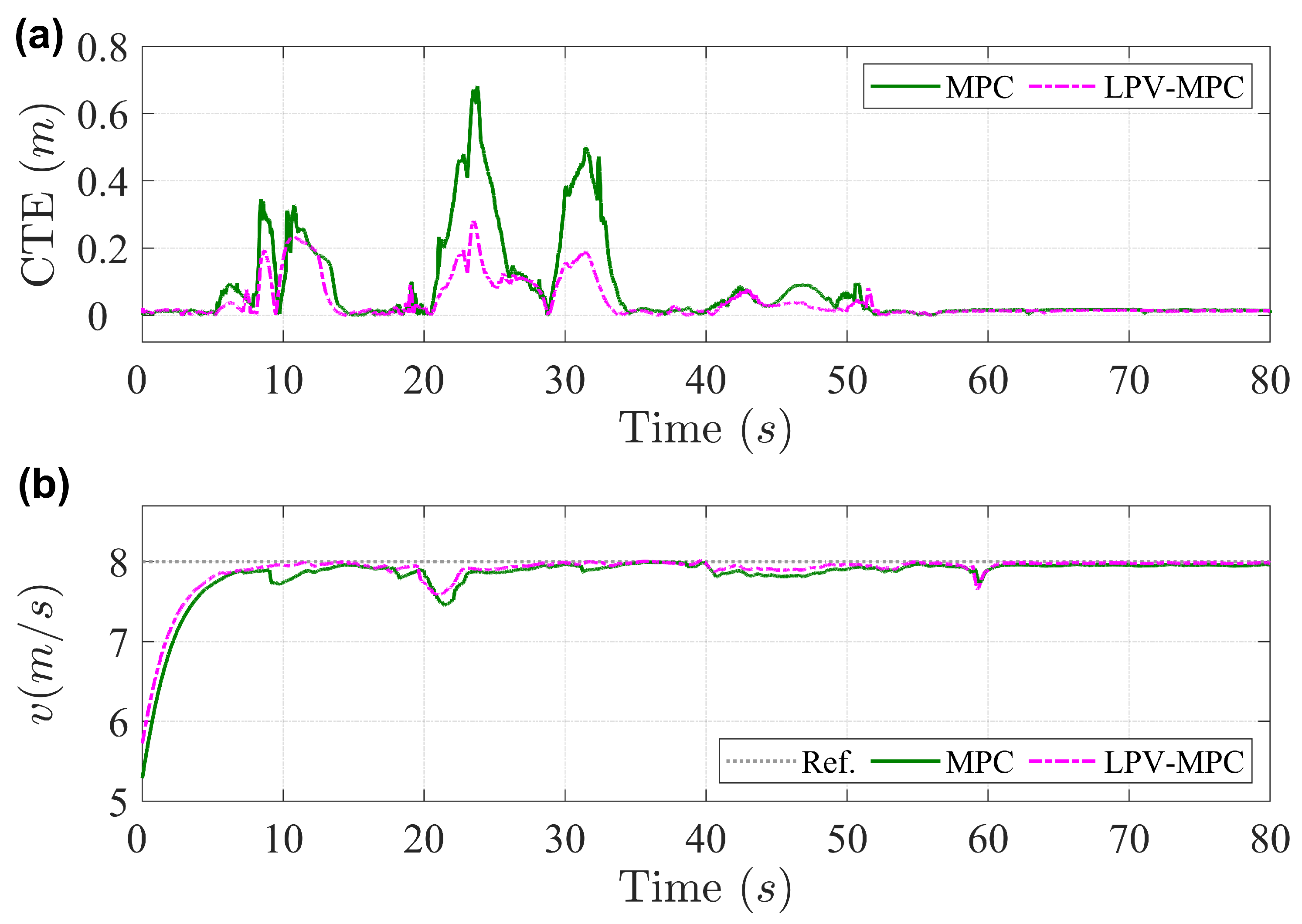
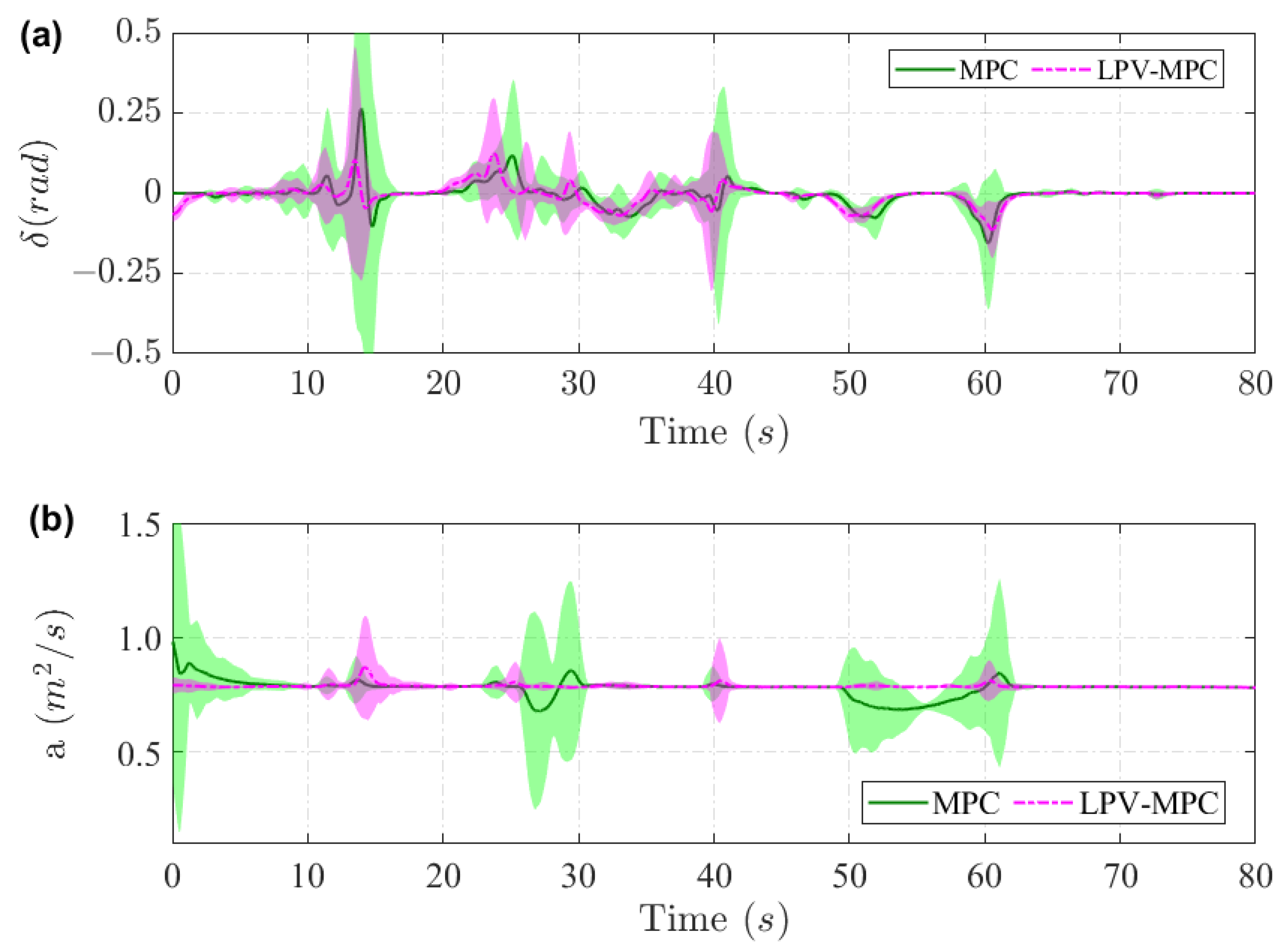
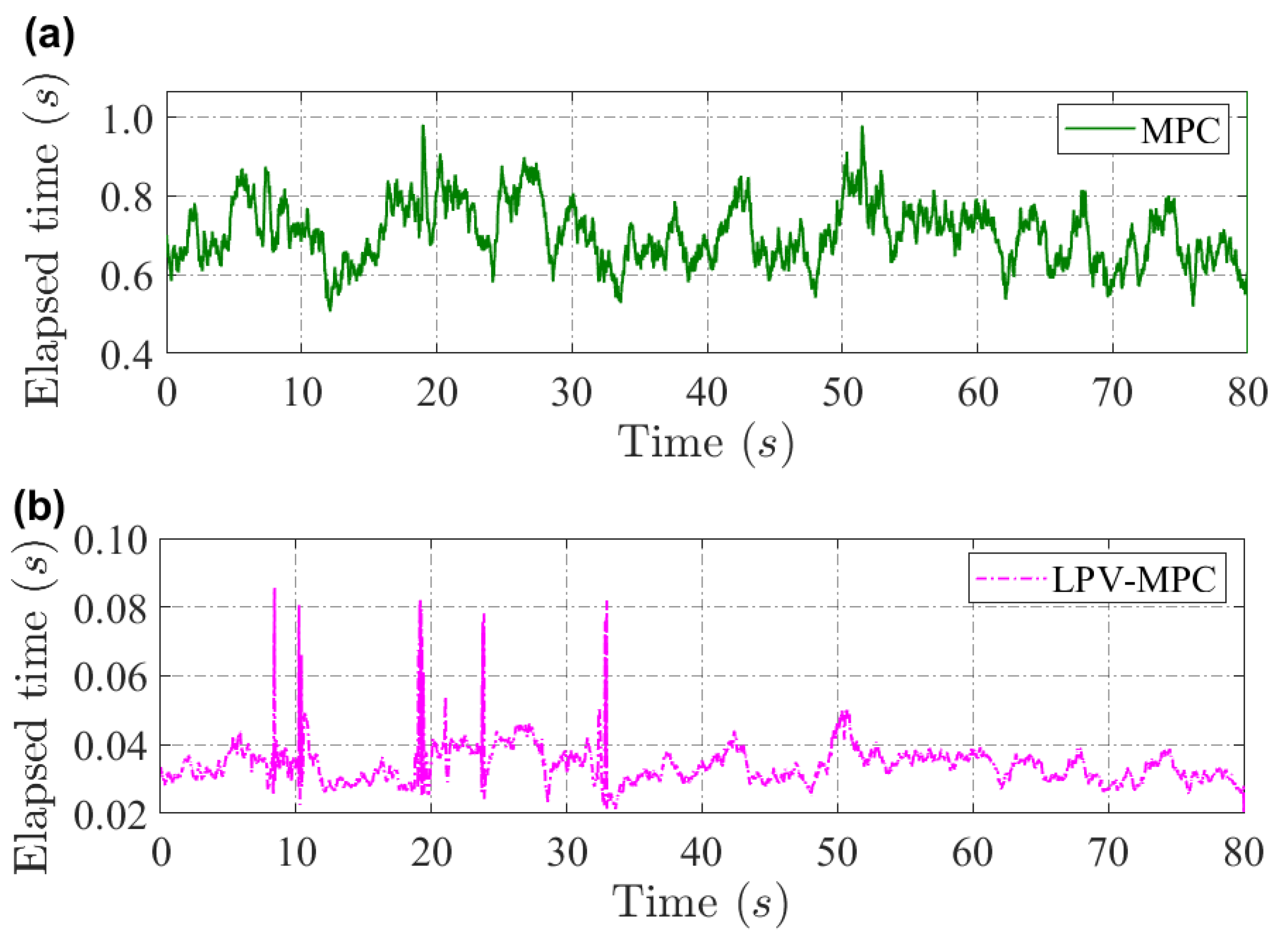
3.2. Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AV | Autonomous vehicle |
| MPC | Model predictive control |
| LPV-MPC | Linear parameter-varying model predictive control |
| CTE | Cross-tracking error |
Appendix A. Candidate Trajectory Generation and Smoothness Optimization
| Algorithm A1: Candidate Trajectory Generation |
 |
| Algorithm A2: Smoothness Optimization of Candidate Path |
 |
Appendix B. Mathematical Model
References
- Bin-Nun, A.Y.; Derler, P.; Mehdipour, N.; Tebbens, R.D. How should autonomous vehicles drive? Policy, methodological, and social considerations for designing a drive. Humanit. Soc. Sci. Commun. 2022, 9, 299. [Google Scholar] [CrossRef]
- Parekh, D.; Poddar, N.; Rajpurkar, A.; Chahal, M.; Kumar, N.; Joshi, G.P.; Cho, W. A Review on Autonomous Vehicles: Progress, Methods and Challenges. Electronics 2022, 11, 2162. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, H.; Khajepour, A.; Ding, H.; Yuan, K.; Qin, Y. A Novel Local Motion Planning Framework for Autonomous Vehicles Based on Resistance Network and Model Predictive Control. IEEE Trans. Veh. Technol. 2020, 69, 55–66. [Google Scholar] [CrossRef]
- Wang, H.; Huang, Y.; Khajepour, A.; Zhang, Y.; Rasekhipour, Y.; Cao, D. Crash Mitigation in Motion Planning for Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 3313–3323. [Google Scholar] [CrossRef]
- Daoud, M.A.; Mehrez, M.W.; Rayside, D.; Melek, W.W. Simultaneous Feasible Local Planning and Path-Following Control for Autonomous Driving. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16358–16370. [Google Scholar] [CrossRef]
- Wang, Q.; Li, J.; Yang, L.; Yang, Z.; Li, P.; Xia, G. Distributed Multi-Mobile Robot Path Planning and Obstacle Avoidance Based on ACO–DWA in Unknown Complex Terrain. Electronics 2022, 11, 2144. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.; Khajepour, A.; Huang, Y.; Qin, Y.; Zheng, L. A Novel Combined Decision and Control Scheme for Autonomous Vehicle in Structured Road Based on Adaptive Model Predictive Control. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16083–16097. [Google Scholar] [CrossRef]
- Chen, C.; Rickert, M.; Knoll, A. Kinodynamic motion planning with Space-Time Exploration Guided Heuristic Search for car-like robots in dynamic environments. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 2666–2671. [Google Scholar]
- Ajanovic, Z.; Lacevic, B.; Shyrokau, B.; Stolz, M.; Horn, M. Search-Based Optimal Motion Planning for Automated Driving. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 4523–4530. [Google Scholar]
- Jeon, J.h.; Karaman, S.; Frazzoli, E. Anytime computation of time-optimal off-road vehicle maneuvers using the RRT*. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 3276–3282. [Google Scholar]
- Montes, N.; Mora, M.C.; Tornero, J. Trajectory Generation based on Rational Bezier Curves as Clothoids. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 505–510. [Google Scholar]
- Berglund, T.; Brodnik, A.; Jonsson, H.; Staffanson, M.; Soderkvist, I. Planning Smooth and Obstacle-Avoiding B-Spline Paths for Autonomous Mining Vehicles. IEEE Trans. Autom. Sci. Eng. 2010, 7, 167–172. [Google Scholar] [CrossRef]
- Glaser, S.; Vanholme, B.; Mammar, S.; Gruyer, D.; Nouvelière, L. Maneuver-Based Trajectory Planning for Highly Autonomous Vehicles on Real Road With Traffic and Driver Interaction. IEEE Trans. Intell. Transp. Syst. 2010, 11, 589–606. [Google Scholar] [CrossRef]
- Moreau, J.; Melchior, P.; Victor, S.; Aioun, F.; Guillemard, F. Path planning with fractional potential fields for autonomous vehicles. IFAC-PapersOnLine 2017, 50, 14533–14538. [Google Scholar] [CrossRef]
- Lim, W.; Lee, S.; Sunwoo, M.; Jo, K. Hierarchical Trajectory Planning of an Autonomous Car Based on the Integration of a Sampling and an Optimization Method. IEEE Trans. Intell. Transp. Syst. 2018, 19, 613–626. [Google Scholar] [CrossRef]
- Jeong, D.; Ko, G.; Choi, S.B. Estimation of sideslip angle and cornering stiffness of an articulated vehicle using a constrained lateral dynamics model. Mechatronics 2022, 85, 102810. [Google Scholar] [CrossRef]
- Barbosa, F.M.; Marcos, L.B.; da Silva, M.M.; Terra, M.H.; Junior, V.G. Robust path-following control for articulated heavy-duty vehicles. Control Eng. Pract. 2019, 85, 246–256. [Google Scholar] [CrossRef]
- Zhao, W.; Ma, X.; Nie, Z. DDPG-based controller of enhanced adaptive cruise control with lane-change assistance for an articulated vehicle. Proc. Inst. Mech. Eng. Part J. Automob. Eng. 2022. [Google Scholar] [CrossRef]
- Polack, P. Consistency and Stability of Hierarchical Planning and Control Systems for Autonomous Driving. Ph.D. Dissertation, PSL Research University, Paris, France, October 2018. [Google Scholar]
- Koenig, S.; Likhachev, M. D*lite. In Proceedings of the Eighteenth National Conference on Artificial Intelligence, Edmonton, AB, Canada, 28 July–1 August 2002; American Association for Artificial Intelligence: Washington, DC, USA, 2002; pp. 476–483. [Google Scholar]
- Simmons, R. The curvature-velocity method for local obstacle avoidance. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 4, pp. 3375–3382. [Google Scholar]
- Li, X.; Sun, Z.; Kurt, A.; Zhu, Q. A sampling-based local trajectory planner for autonomous driving along a reference path. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 376–381. [Google Scholar]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Xu, T.; Wang, D.; Zhang, W. A non-overshooting controller for vehicle path following. Trans. Inst. Meas. Control. 2021, 43, 2282–2291. [Google Scholar] [CrossRef]
- Morales, Y.; Watanabe, A.; Ferreri, F.; Even, J.; Ikeda, T.; Shinozawa, K.; Miyashita, T.; Hagita, N. Including human factors for planning comfortable paths. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6153–6159. [Google Scholar]
- Shojaei, S.; Hanzaki, A.R.; Azadi, S.; Saeedi, M.A. A novel decision-making unit for automated maneuver of articulated vehicles in real traffic situations. Proc. Inst. Mech. Eng. Part J. Automob. Eng. 2020, 234, 152–171. [Google Scholar] [CrossRef]
- Fehér, Á.; Aradi, S.; Bécsi, T. Online Trajectory Planning with Reinforcement Learning for Pedestrian Avoidance. Electronics 2022, 11, 2346. [Google Scholar] [CrossRef]
- Wiberg, V.; Wallin, E.; Nordfjell, T.; Servin, M. Control of Rough Terrain Vehicles Using Deep Reinforcement Learning. IEEE Robot. Autom. Lett. 2022, 7, 390–397. [Google Scholar] [CrossRef]
- Song, R.; Ye, Z.; Wang, L.; He, T.; Zhang, L. Autonomous Wheel Loader Trajectory Tracking Control Using LPV-MPC. In Proceedings of the 2022 American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022; pp. 2063–2069. [Google Scholar]
- Fu, T.; Zhou, H.; Liu, Z. NMPC-Based Path Tracking Control Strategy for Autonomous Vehicles with Stable Limit Handling. IEEE Trans. Veh. Technol. 2022, 71, 12499–12510. [Google Scholar] [CrossRef]
- Zhai, L.; Wang, C.; Hou, Y.; Liu, C. MPC-Based Integrated Control of Trajectory Tracking and Handling Stability for Intelligent Driving Vehicle Driven by Four Hub Motor. IEEE Trans. Veh. Technol. 2022, 71, 2668–2680. [Google Scholar] [CrossRef]
- Vo, C.P.; Lee, J.; Jeon, J.H. Robust Adaptive Path Tracking Control Scheme for Safe Autonomous Driving via Predicted Interval Algorithm. IEEE Access 2022, 10, 124333–124344. [Google Scholar] [CrossRef]
- Tian, Y.; Yao, Q.; Hang, P.; Wang, S. A Gain-Scheduled Robust Controller for Autonomous Vehicles Path Tracking Based on LPV System With MPC and H∞. IEEE Trans. Veh. Technol. 2022, 71, 9350–9362. [Google Scholar] [CrossRef]
- Peng, H.; Wang, W.; An, Q.; Xiang, C.; Li, L. Path Tracking and Direct Yaw Moment Coordinated Control Based on Robust MPC With the Finite Time Horizon for Autonomous Independent-Drive Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 6053–6066. [Google Scholar] [CrossRef]
- MORAI. Available online: https://www.morai.ai/product (accessed on 1 February 2022).
- Chu, D.; Li, H.; Zhao, C.; Zhou, T. Trajectory Tracking of Autonomous Vehicle Based on Model Predictive Control With PID Feedback. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2239–2250. [Google Scholar] [CrossRef]
- Rotondo, D.; Puig, V.; Nejjari, F.; Witczak, M. Automated generation and comparison of Takagi–Sugeno and polytopic quasi-LPV models. Fuzzy Sets Syst. 2015, 277, 44–64. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vo, C.P.; Jeon, J.h. An Integrated Motion Planning Scheme for Safe Autonomous Vehicles in Highly Dynamic Environments. Electronics 2023, 12, 1566. https://doi.org/10.3390/electronics12071566
Vo CP, Jeon Jh. An Integrated Motion Planning Scheme for Safe Autonomous Vehicles in Highly Dynamic Environments. Electronics. 2023; 12(7):1566. https://doi.org/10.3390/electronics12071566
Chicago/Turabian StyleVo, Cong Phat, and Jeong hwan Jeon. 2023. "An Integrated Motion Planning Scheme for Safe Autonomous Vehicles in Highly Dynamic Environments" Electronics 12, no. 7: 1566. https://doi.org/10.3390/electronics12071566
APA StyleVo, C. P., & Jeon, J. h. (2023). An Integrated Motion Planning Scheme for Safe Autonomous Vehicles in Highly Dynamic Environments. Electronics, 12(7), 1566. https://doi.org/10.3390/electronics12071566