



Kinematically Constrained Jerk–Continuous S-Curve Trajectory Planning in Joint Space for Industrial Robots



Abstract
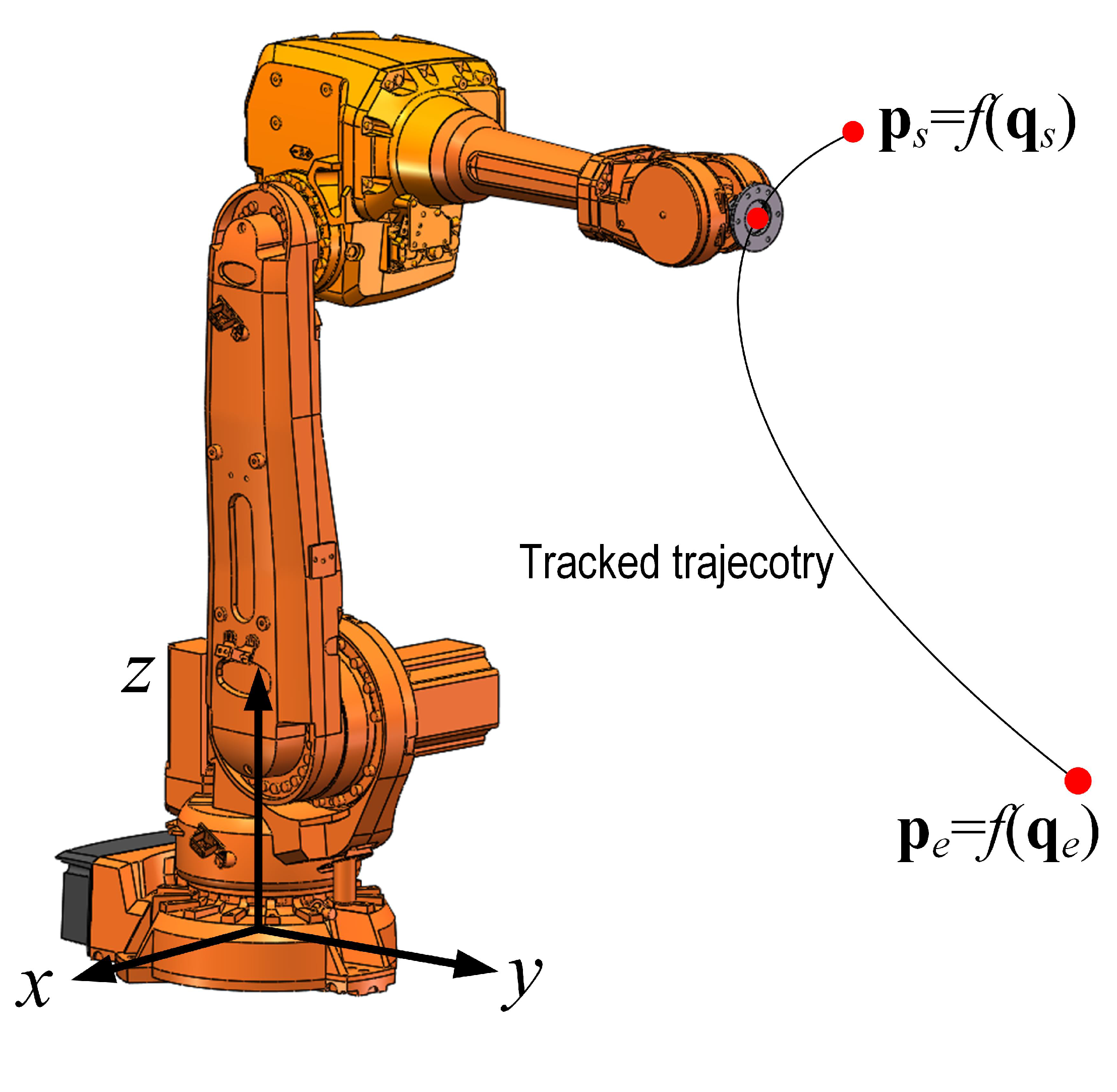
1. Introduction
2. Jerk–Continuous Trajectory Planning
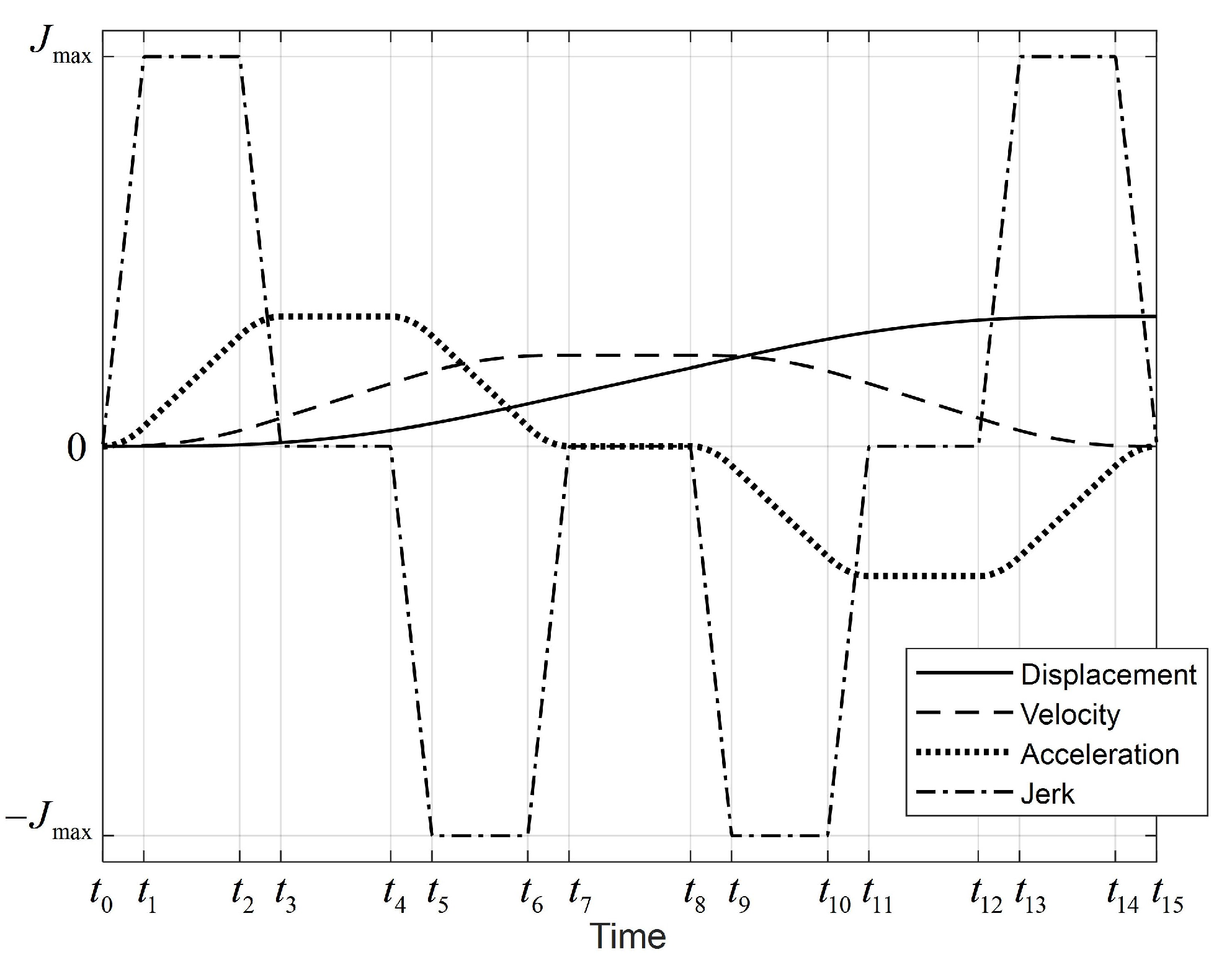
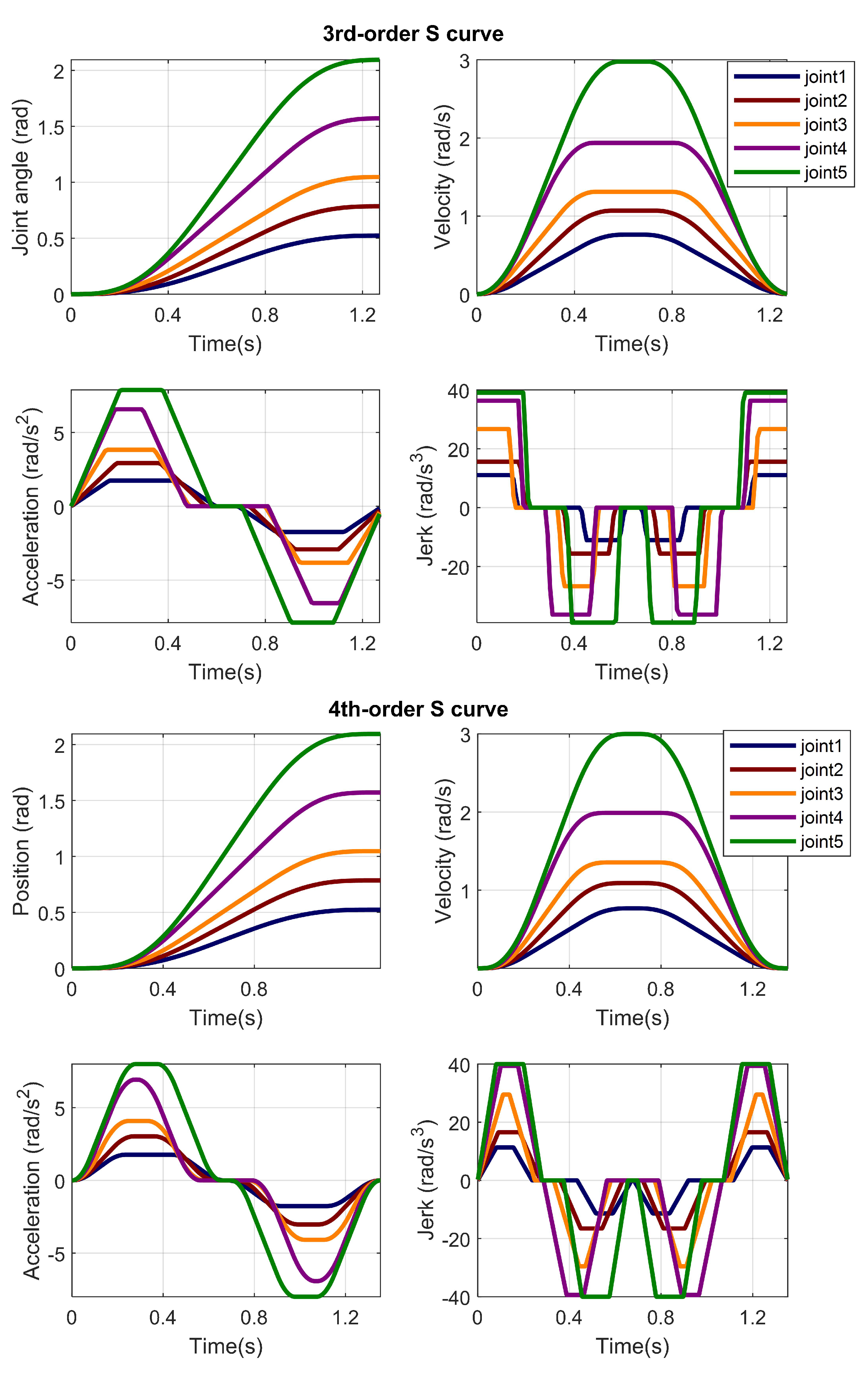
2.1. From Third-Order to Fourth-Order S-Curve Trajectories
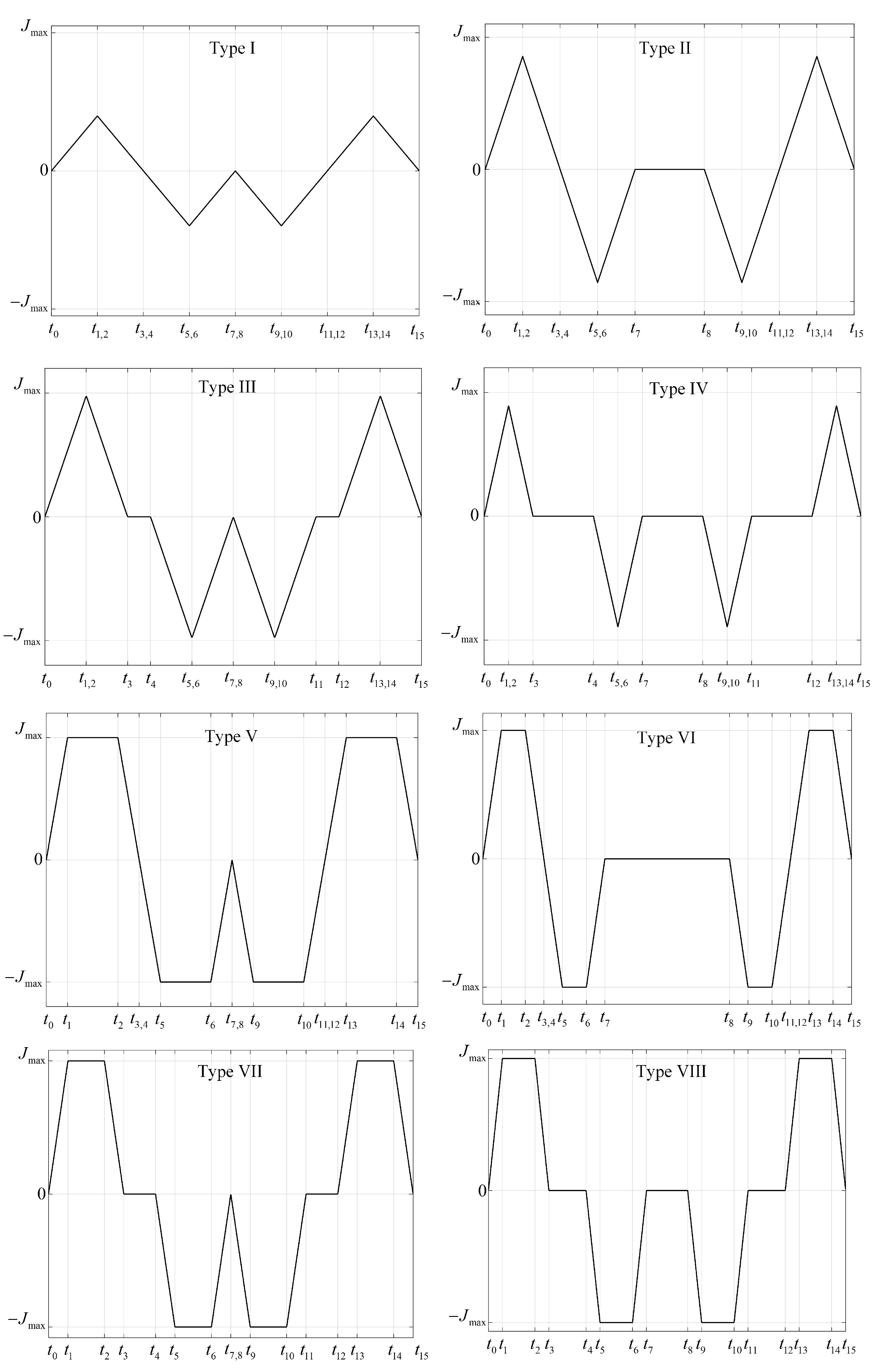
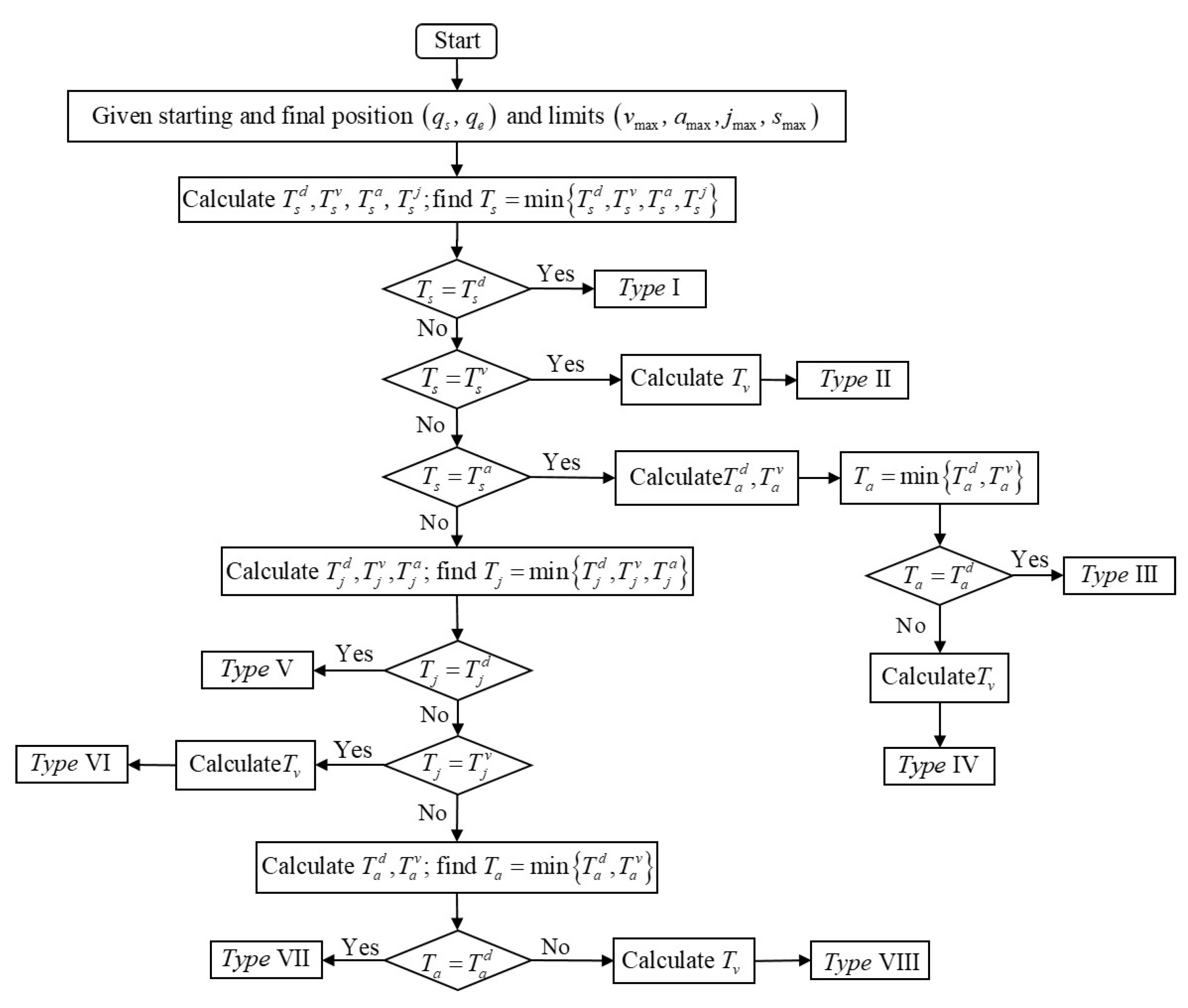
2.2. Calculation of the Time Parameter
2.2.1. Calculation of Time Interval with Varying Jerk
- Case 1:
- If , the displacement constraint is the only influencing factor that limits the motion time; thus, it is unnecessary to calculate the time intervals of the other trajectory segments, and there are only trajectory segments with varying jerks. In this case, the motion parameters, such as the jerk, acceleration, and velocity, cannot reach their maximum, and the real maximum jerk, acceleration, and velocity are equal to , , and , respectively.
- Case 2:
- If , the maximum velocity can be reached without the maximum jerk and acceleration. In this case, the maximal reachable jerk and acceleration are and , respectively. For the calculation of the remaining motion parameters, the reader can refer to Section 2.2.4.
- Case 3:
- If , the maximum acceleration reaches its maximum without the maximum jerk, and the maximum reachable jerk is . For the calculation of the remaining motion parameters, the reader can refer to Section 2.2.3.
- Case 4:
- If , for the calculation of the remaining motion parameters, the reader can refer to Section 2.2.2.
2.2.2. Calculation of Time Interval with Constant Jerk
- Case 1:
- If , i.e., , only the trajectory segments with varying jerk and constant jerk exist, and the jerk can reach its maximum ; therefore, the real maximum acceleration and velocity are calculated as and , respectively.
- Case 2:
- If , the maximum velocity can reach its maximum without the maximum acceleration, and the real maximum acceleration is calculated as . For the calculation of the other motion parameters, the reader can refer to Section 2.2.4.
- Case 3:
- If , for the calculation of the time intervals, the reader can refer to Section 2.2.3.
2.2.3. Calculation of Time Interval with Constant Acceleration
- Case 1:
- If , i.e., , due to the limitation on displacement, trajectory segments with a constant velocity do not exist. Although the acceleration can reach its maximum, the velocity cannot, and the real maximum velocity is .
- Case 2:
- If , both the maximum acceleration and velocity can reach their maximums, and for the calculation of the motion parameters, the reader can refer to Section 2.2.4.
2.2.4. Calculation of Time Interval with Constant Velocity
2.3. Time Synchronization of Multi-Axis Motions
| Algorithm 1 Trajectory planning algorithm for multi-axis synchronization |
| Input: The initial and final positions of the robot and the kinematic constraints |
| Output: Time-synchronized motion trajectory |
| 1: Use of the single-joint trajectory planning algorithm to calculate the execution time of trajectory planning for each joint |
| 2: Selection of the maximum execution time in step 1 as the synchronization time |
| 3: Calculation of the synchronization factor , |
| 4: Modification of the kinematic constraints of each joint |
| 5: Calculation of the new motion trajectory according to the new kinematic constraint |
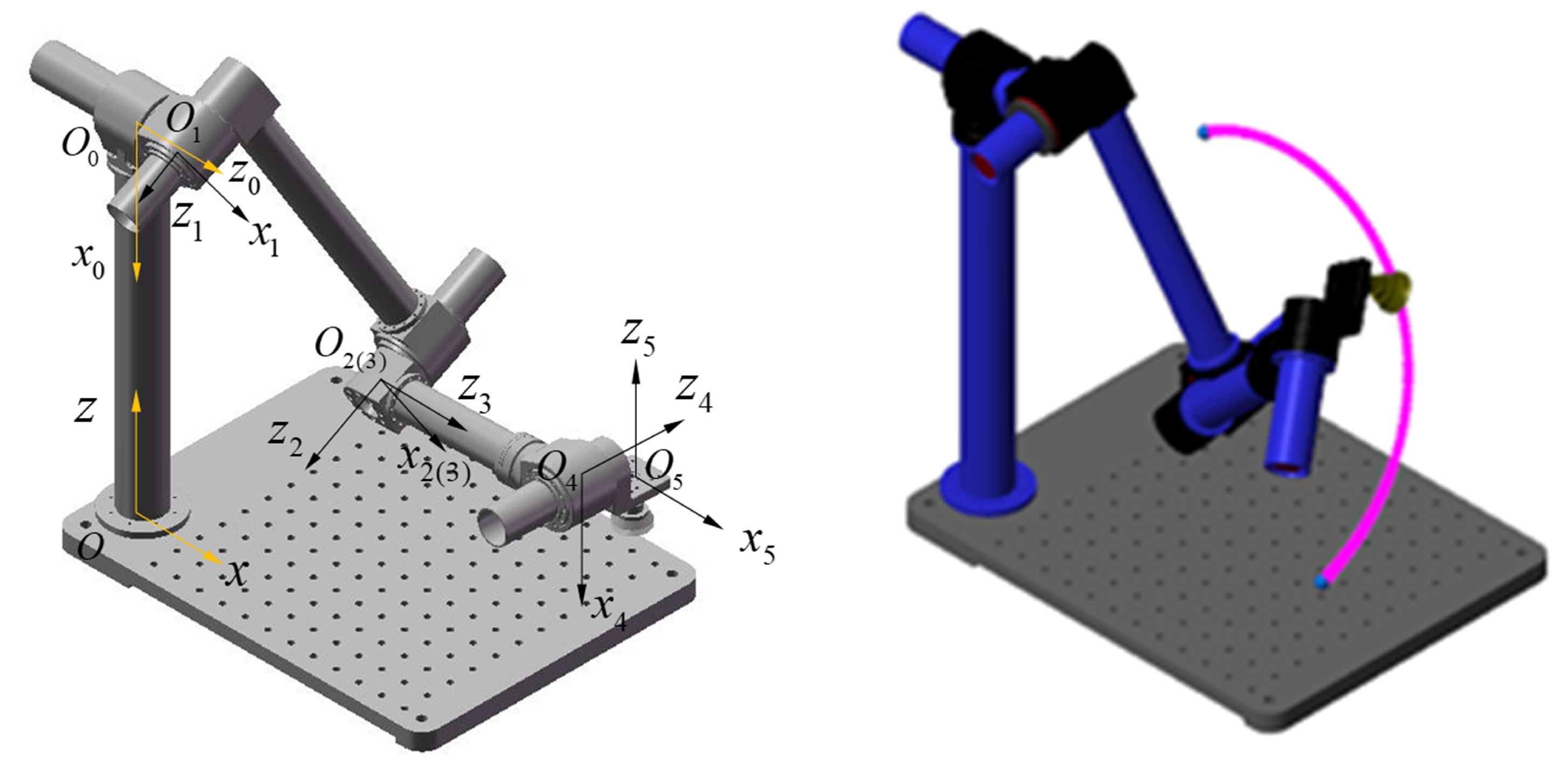
3. Case Study: Trajectory Planning for a Five-Axis Manipulator
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Trajectory planning in robotics. Math. Comput. Sci 2012, 6, 269–279. [Google Scholar] [CrossRef]
- Moghaddam, M.; Nof, S.Y. Parallelism of pick-and-place operations by multi-gripper robotic arms. Robot. Comput.-Integr. Manuf. 2016, 42, 135–146. [Google Scholar] [CrossRef]
- Wei, S.; Han, W.; Huang, M. A trajectory planning algorithm for industrial robots based on kinematics constraints. J. Henan Polytec. Uni. 2020, 39, 91–96. [Google Scholar]
- Cook, C.C.; Ho, C.Y. The application of spline functions to trajectory generation for computer-controlled manipulators. In Computing Techniques for Robots; Aleksander, I., Ed.; Springer: Boston, MA, USA, 1985; pp. 101–110. [Google Scholar]
- Chen, Y.-C. Solving robot trajectory planning problems with uniform cubic B-splines. Optim. Control Appl. Methods 1991, 12, 247–262. [Google Scholar] [CrossRef]
- Nguyen, K.D.; Ng, T.C.; Chen, I.M. On algorithms for planning s-curve motion profiles. Int. J. Adv. Robot. Syst. 2008, 5, 11. [Google Scholar] [CrossRef]
- Wu, G.; Zhao, W.; Zhang, X. Optimum time-energy-jerk trajectory planning for serial robotic manipulators by reparameterized quintic NURBS curves. Proc. Ins. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 4382–4393. [Google Scholar] [CrossRef]
- Wu, G.; Zhang, S. Real-time jerk-minimization trajectory planning of robotic arm based on polynomial curve optimization. Proc. Ins. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 10852–10864. [Google Scholar] [CrossRef]
- Lin, C.S.; Chang, P.R.; Luh, J. Formulation and optimization of cubic polynomial joint trajectories for industrial robots. IEEE Trans. Autom. Contrl. 1984, 28, 1066–1074. [Google Scholar] [CrossRef]
- Liu, X.L.; Lin, S.G.; Ou, Y.-X. The trajectory planning of manipulator double-Quintic transition. Mach. Des. Manuf. 2014, 4, 40–43. [Google Scholar]
- Tang, J.T.; Zhang, J.J.; Wang, X.H.; Yang, G.W.; Qi, K.C. An improved study of robot trajectory planning. Mech. Des. 2017, 34, 31–35. [Google Scholar]
- Machmudah, A.; Parman, S.; Zainuddin, A.; Chacko, S. Polynomial joint angle arm robot motion planning in complex geometrical obstacle. Appl. Soft Comput. 2013, 13, 1099–1109. [Google Scholar] [CrossRef]
- Huang, J.; Hu, P.; Wu, K.; Zeng, M. Optimal time-jerk trajectory planning for industrial robots. Mech. Mach. Theory 2018, 121, 530–544. [Google Scholar] [CrossRef]
- Kucuk, S. Optimal trajectory generation algorithm for serial and parallel manipulators. Robot. Comput. Integr. Manuf. 2017, 48, 219–232. [Google Scholar] [CrossRef]
- Meckl, P.H.; Seering, W.P. Minimizing residual vibration for point-to-point motion. Vib. Acous. Streas. Rel. Des. 1985, 107, 378–382. [Google Scholar] [CrossRef]
- Meckl, P.H.; Arestides, P.B.; Woods, M.C. Optimized s-curve motion profiles for minimum residual vibration. In Proceedings of the 1998 American Control Conference, Philadelphia, PA, USA, 26 June 1998; pp. 2627–2631. [Google Scholar]
- Tsay, D.M.; Lin, C.F. Asymmetrical inputs for minimizing residual response. In Proceedings of the IEEE International Conference on Mechatronics, Taipei, Taiwan, 10–12 July 2005; pp. 235–240. [Google Scholar]
- Siciliano, B.; Sciavicco, L.; Oriola, G. Trajectory Planning. In Robotics: Modelling, Planning and Control; Springer: London, UK, 2008; pp. 161–189. [Google Scholar]
- Castain, R.H.; Paul, R.P. An on-line dynamic trajectory generator. Int. J. Robot. Res. 1984, 3, 68–72. [Google Scholar] [CrossRef]
- Biagiotti, L.; Melchiorri, C. Trajectory Planning for Automatic Machines and Robots; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Pontryagin, L.S. Mathematical Theory of Optimal Processes; Routledge: Oxford, UK, 2018. [Google Scholar]
- Lee, A.Y.; Choi, Y. Smooth trajectory planning methods using physical limits. Proc. Ins. Mech. Eng. Part C J. Mech. Eng. Sci. 2014, 229, 2127–2143. [Google Scholar] [CrossRef]
- Zhang, X.S.; Zhu, D.K.; Pan, F. Research on S-curve flexible Acc/Dec control algorithm in NC machining. Manuf. Autom. 2020, 42, 68–73, 124. [Google Scholar]
- Mellinger, D.; Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2520–2525. [Google Scholar]
- Macfarlane, S.; Croft, E.A. Jerk-bounded manipulator trajectory planning: Design for real-time applications. IEEE Trans. Robot. Autom. 2003, 19, 42–52. [Google Scholar] [CrossRef]
- Chettibi, T.; Lehtihet, H.; Haddad, M.; Hanchi, S. Minimum cost trajectory planning for industrial robots. Eur. J. Mech. 2004, 23, 703–715. [Google Scholar] [CrossRef]
- Huang, T.; Wang, P.F.; Mei, J.P.; Zhao, X.M.; Chetwynd, D.G. Time minimum trajectory planning of a 2-DOF translational parallel robot for pick-and-place operations. CIRP Ann. 2007, 56, 365–368. [Google Scholar] [CrossRef]
- Ziegler, J.; Bender, P.; Dang, T.; Stiller, C. Trajectory planning for Bertha-local, continuous method. In Proceedings of the IEEE Intelligent Vehicles Symposium, Dearborn, MI, USA, 8–11 June 2014; pp. 450–457. [Google Scholar]
- Dai, Z.; Sheng, X.; Hu, J.; Zhang, D. Design and implementation of Béier curve trajectory planning in DELTA parallel robots. In Proceedings of the8th International Conference, ICIRA 2015, Portsmouth, UK, 24–27 August 2015; pp. 420–430. [Google Scholar]
- Min, K.; Ni, F.; Zhang, G.; Shu, X.; Liu, H. A C2 continuous trajectory planning method for 6-DOF rotational robot manipulators. Assem. Autom. 2022, 42, 616–627. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Function of Motion Profiles | Notations |
|---|---|---|
| Axis | Initial Position | Final Position | Velocity | Acceleration | Jerk |
|---|---|---|---|---|---|
| x | 0 | 3 | 2 | 4 | 40 |
| y | 0 | 2 | 1.4 | 5 | 35 |
| z | 0 | 1.5 | 1.2 | 3 | 35 |
| Joint | 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|---|
| Angular position | Initial | 0 | 0 | 0 | 0 | 0 |
| Final | ||||||
| Kinematic constraints | Velocity | 1 | 1.4 | 1.4 | 2 | 3 |
| Acceleration | 3 | 5 | 5 | 7 | 8 | |
| Jerk | 25 | 35 | 40 | 40 | 40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, G.; Zhang, N. Kinematically Constrained Jerk–Continuous S-Curve Trajectory Planning in Joint Space for Industrial Robots. Electronics 2023, 12, 1135. https://doi.org/10.3390/electronics12051135
Wu G, Zhang N. Kinematically Constrained Jerk–Continuous S-Curve Trajectory Planning in Joint Space for Industrial Robots. Electronics. 2023; 12(5):1135. https://doi.org/10.3390/electronics12051135
Chicago/Turabian StyleWu, Guanglei, and Ning Zhang. 2023. "Kinematically Constrained Jerk–Continuous S-Curve Trajectory Planning in Joint Space for Industrial Robots" Electronics 12, no. 5: 1135. https://doi.org/10.3390/electronics12051135
APA StyleWu, G., & Zhang, N. (2023). Kinematically Constrained Jerk–Continuous S-Curve Trajectory Planning in Joint Space for Industrial Robots. Electronics, 12(5), 1135. https://doi.org/10.3390/electronics12051135