1. Introduction
SLAM (Simultaneous Localization And Mapping) aims to solve the problem of localization of an autonomous robot in an unknown environment by simultaneously mapping the surroundings. The emergence of indoor applications of mobile robotics has made SLAM an attractive alternative to user-built maps [
1]. Moreover, SLAM is gradually finding applications outdoors, underwater, and in space devoid of a Global Positioning System (GPS) [
2]. Essentially, SLAM can be divided into a process of front-end and back-end formulation, where the front-end comprises feature extraction, data association, and outlier rejection, whereas the back-end deals with the main estimation process of robot poses and landmark positions [
1]. Based on factors, such as spatial representation, the structure and dynamics of the environment, and the employed sensors, a variety of approaches to SLAM can be used, which include but are not limited to GraphSLAM, FastSLAM, and VoSLAM [
3].
Several developments have been made for mobile mapping systems using ground-based systems, but unmanned aerial vehicles (UAVs) could provide advantages at hazardous sites compared to other platforms and enable mapping at different resolutions with the ability to fly at different elevations and speeds [
4]. For UAVs, the most popular method for SLAM implementation has been based on Extended Kalman Filter (EKF), that is EKF-SLAM, with a majority using Inertial Measurement Units (IMUs) as proprioceptive sensors and visual odometry-based sensors such as cameras as exteroceptive sensors [
5]. The EKF-SLAM approach was first proposed by Smith et al. [
6], where EKF is a Bayesian approach of estimation utilizing posterior probability distribution. EKF-SLAM faces key issues, especially in terms of computational effort as computation increases quadratically with the number of landmarks [
7]. Still, EKF-SLAM is the most popular method with the ability to deal with non-linear systems, and plenty of available research and resources [
8].
SLAM is basically solved specifically for vision-based slow robots in 2D indoor environments [
1], but it is still an enigma for highly agile robots such as quadcopters, operating in indoor or outdoor environments. The SLAM algorithm has been studied for UAVs with 3D observations of LiDAR (Light Detection And Ranging) or comparable to LiDAR in a few research works [
2,
4,
9,
10,
11,
12]. Note that cameras are extremely sensitive to lighting conditions and have limitations in capturing the geometry of the observed scene and generating more accurate maps, thus a more effective sensor, LiDAR, is being considered more lately [
4]. Cho and Hwang [
9] conducted SLAM with just four landmarks using EKF-SLAM and observation in terms of range and attitude difference. In [
10], 3D SLAM is performed for UAVs using a linear Kalman filter with the linearized model for the UAVs and range-bearing measurements. A data fusion algorithm was proposed for UAVs by the integration of LiDAR measurements with GPS to perform in GPS-degraded environments [
11]. Kim et al. [
12] discussed an application of LiDAR for the localization of speedy UAVs in a GPS-denied outdoor environment while conducting surface reconstruction and elevation registration. While all of the aforementioned studies have used EKF in some form, there are others. Sadeghzadeh-Nokhodberiz et al. [
2] studied the application of 3D SLAM on UAVs using FastSLAM and LiDAR. Karam et al. [
4] used LiDAR for validation of the performance of GraphSLAM using rangefinders on UAVs.
Most works discussed above are focused on localization and mapping and mostly have not discussed the control strategies used. Many of them used the most basic controller such as PID control with pre-defined control signals for following a set trajectory. In [
13], SLAM was achieved using a sliding mode control for the non-linear system of a quadcopter, but still lacked the ability to closely follow a given trajectory over extended periods. Moreover, UAVs can have aggressive maneuvers where fast and reliable SLAM is required. Thus, this work proposes the use of a Differential Flatness-based Linear Quadratic Regulator (DF-LQR). It is known that LQR is an optimum control superior to other classical approaches including PID in terms of robustness, energy performance, computational efficiency, and tuning parameters [
14]. However, LQR by itself can only be applied to linear or linearized systems. A DF-based approach, where the non-linear system of quadcopters can be formulated linearly for control using LQR, has been proposed to achieve aggressive maneuvers [
15]. For UAVs operating in any dangerous conditions, aggressive maneuvers could be paramount and thus DF-based LQR control for quadcopters could be an ideal choice. In practice, control is achieved in SLAM based on control signals obtained using estimated states rather than true-value states, but many researchers have been conducting studies assuming true-value states [
2,
9,
10]. DF-based LQR control has not been studied in conjunction with 3D SLAM, and thus this work proposes to do so while also calculating control signals from estimated states. The effectiveness of this control strategy is validated by comparing the results of estimated quadcopter states when landmarks are unknown and are also being estimated to a case when landmarks are known.
As mentioned previously, EKF-SLAM is computationally intensive with the increasing number of landmarks, but it is still a method of choice for several researchers, as is evident from several kinds of research over the years using EKF [
8]. While there has been research on reducing the computational complexity of EKF-SLAM with the use of local maps for 2D motion [
16], it would be beneficial if there are metrics that can provide inference on computation time for different steps of SLAM, such as prediction, update, and registration such that decisions can be made on the size of map space for predictions, the number of landmarks for update, or registration, or even the time step for SLAM. This work proposes a strategy to reduce the computational effort of EKF-SLAM, which is tightly combined with the UAV control discussed above. It conducts multiple simulations over different numbers of landmarks to study the relationship between these time parameters with the landmarks in consideration. Although these metrics were derived for the specific computing resources available in this study, comparable metrics can be derived for other computing resources in use. Therefore, it is thought that it can provide direction to researchers who want to use or improve EKF-SLAM in the future.
In summary, the contributions of this paper are summarized below:
Study of DF-based LQR control in 3D EKF-SLAM to achieve a better and more realistic trajectory control using estimated states.
A pragmatic way of using LiDAR measurements as they become available based on UAV position and LiDAR’s Field Of View (FOV).
Inducing decision-making to improve the computational efficiency of the appropriate number of landmarks or EKF-SLAM through the development of a metric of the relationship between the number of landmarks and the time step.
3. Simulation Results and Discussion
For the simulation, the considered quadcopter’s mass and inertia properties are tabulated in
Table 1. The objective of LQR-based control is to reduce tracking errors while ensuring the least amount of work is performed. The weight matrices are chosen to maintain proximity to the desired trajectory and are tabulated in
Table 2. For verifying the efficacy of the DF-LQR-based EKF-SLAM for aggressive maneuvers, a desired trajectory of ‘8’ is chosen. Initially, the quadcopter is set at the origin and controlled to achieve the trajectory over the simulation time of 50 s. Static landmarks are generated randomly around the trajectory of the quadcopter within the region set by the azimuth range, elevation range, and radial range detailed in
Table 3. The number of landmarks chosen for simulation is 40 to ensure the observability of the system during the EKF-SLAM process. The sensor specifications assumed for the LiDAR and the IMU equipped in the quadcopter are detailed in
Table 4 and
Table 5, respectively. The specifications listed include the range and noise (standard deviation) for LiDAR measurements and Noise Densities (ND) for accelerometer and gyroscope measurements.
Figure 7 shows the results of the quadcopter traversing through an 8-shape trajectory using DF-LQR for the two scenarios considered for reviewing the effectiveness of EKF-SLAM. The first scenario is where the landmarks are known, i.e., their inertial positions are known and are used to make the updates during the localization of the quadcopter using EKF. This scenario does not include mapping as the landmarks are already known. The second scenario is where the mapping part of EKF-SLAM comes into effect as the landmarks are unknown. The positions of the landmarks are estimated relative to the initially assumed position of the quadcopter. It can easily be seen from the figure that the case of known landmarks has smoother trajectory control than the unknown case, which is expected.
3.1. Estimated Quadcopter States
Now, one compares the estimated states and errors for each of the scenarios to verify the effectiveness of EKF-SLAM using DF-LQR.
The initial state covariance (
) and process noise covariance (
Q) matrices considered for each of the scenarios are given in
Table 6 and
Table 7, respectively.
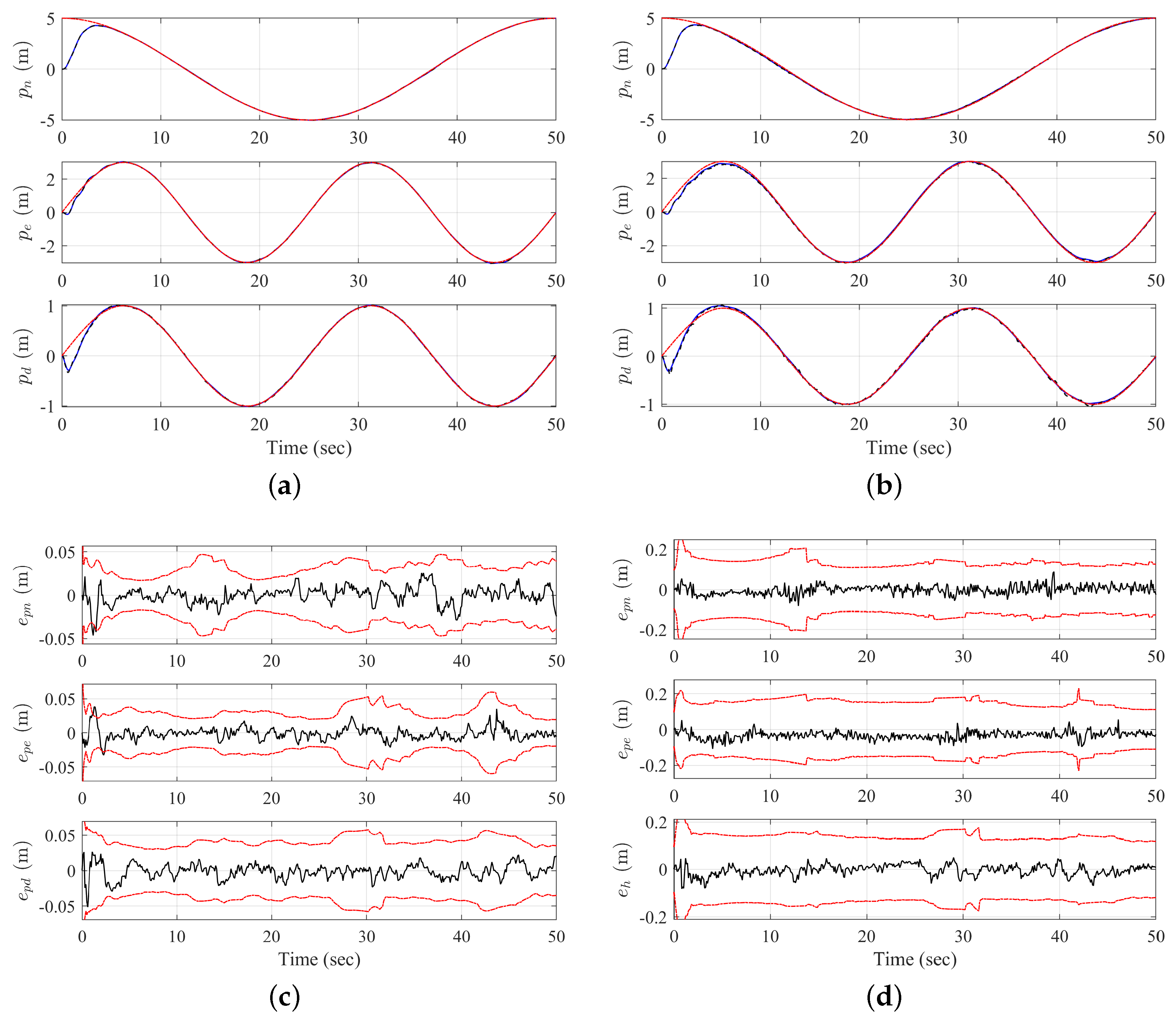
The estimated inertial position of the quadcopter for the known and unknown scenarios are plotted in
Figure 8a,b, respectively. It is visible that the estimated positions are closer to the true trajectory in the known landmarks scenario than in the unknown landmarks scenario. It is more evident from the
boundaries for each scenario in
Figure 8c,d, where the estimation error is lower for the known landmarks case than the unknown landmarks case. However, this greater error in the unknown landmarks scenario is inevitable considering the process also includes the estimation of landmark positions. Moreover, the average Root-Mean-Square Error (RMSE) over the duration of the simulation for its estimated inertial position hovered around 0.04 m when the landmarks were unknown compared to 0.012 m when the landmarks were known. Thus, the increase in the margin of error for the unknown landmarks case is not substantially larger than for the known landmarks case.
The same was the case when comparing results for the estimated velocities over the simulation duration of the two scenarios. As expected, when the landmarks were known, the quadcopter motion closely followed the desired velocity trajectory compared to when landmarks were unknown, as evident from
Figure 9. The average RMSE for the estimated velocity of the quadcopter when landmarks were known was 0.03 m/s and that for unknown landmarks scenario was 0.04 m/s. Again, the estimations were accurate and not that far apart for the two scenarios. It was actually more erred for the known landmarks scenario, which is due to assumed
and
Q matrices.
The results for attitude estimations were astoundingly much better compared to other states estimated for the quadcopter as shown in
Figure 10. The average RMSE for estimation of Euler angles during the simulation was just 0.34 deg for even the unknown landmarks case quite comparable to the known landmarks case, which hovered around 0.17 deg.
It should also be noted that the RMSE for each of the estimated states includes the initial high fluctuations before converging to the trajectory. This is mainly a result of the quadcopter’s initial position being at the origin, which is further from the initial desired trajectory position. It results in rapid motion of the quadcopter to reach the initial desired position and thus the higher fluctuations. Considering the motion of the quadcopter mainly when it has converged to its desired trajectory, the average RMSE is slightly lower for both the known and unknown landmark scenarios.
3.2. Estimation of Landmarks
The landmarks’ inertial position errors are estimated using EKF-SLAM and are depicted in
Figure 11.
Figure 11a shows that each of the inertial coordinates for each of the landmarks is estimated within the
boundary. It is visible in the figure that some landmarks are initialized after some time because they were sensed at that instant only. Thereafter, with the knowledge of uncertainties for previously identified and estimated landmarks, the uncertainty for newly discovered landmarks decreases over time.
Figure 11b shows the final state of estimation error for all the landmarks at the end of the simulation. It can be seen that a few landmarks were never sensed and thus not initialized for estimation. The average RMSE for the estimated position for landmarks was around 0.03 m.
3.3. Computational Time Analysis for EKF-SLAM
The computational complexity of EKF-SLAM increases quadratically with the number of landmarks [
7]. For a different number of landmarks ranging from 5 to 200, the averaged computational time for each of the major steps of EKF-SLAM is displayed in
Figure 12. The prediction step of EKF is directly correlated to the number of mapped landmarks as the size of the cross-covariance matrix propagated in Equation (
29) increases with it. Thus, the averaged computational time for the prediction step is seen varying quadratically with respect to the number of mapped landmarks in
Figure 12a. Likewise, the computation time for the update depends on the number of landmarks that are observed and mapped. The linear trend of averaged computational time for the update considered with respect to the observed mapped landmarks is shown in
Figure 12b, as the update step considers observed mapped landmarks. Lastly, the registration time in SLAM is also linearly dependent on the number of newly discovered landmarks that are registered as depicted in
Figure 12c. It is evident from the figures that the computational effort of EKF-SLAM certainly increases quadratically with the number of landmarks. However, the main idea for generating these plots is to develop a metric or a strategy to run EKF-SLAM in real-time with a choice of the appropriate number of landmarks at each step, minimally affecting the total performance.
For instance, for better performance of EKF-SLAM, it is ideal not to miss any sensor data. Thus, considering the sensors’ sampling rate of 10 Hz, the steps of EKF-SLAM should ideally be complete within 0.1 s. Hence, if for example, the registration step is taking almost 0.1 s, it can be strategically decided to consider a finite number of landmarks using
Figure 12c. Similarly, in case the update step itself is taking longer with making updates using all the observed mapped landmarks, only a few of those landmarks can be used to limit the time of operation to less than 0.1 s. Additionally, it is clear from
Figure 12 that the update and registration steps take more time than the prediction step. Additionally, only after 200 mapped landmarks does prediction have a significant effect on computation time. Hence, if a mission identifies less than around 200 landmarks, decisions can be based upon choosing an appropriate number of landmarks for update and registration. However, in case the number of mapped landmarks is more, decisions can be made where only a few landmarks at random are taken into consideration during the prediction step. It should be noted the results in
Figure 12 will vary among different computers. The results shown were generated using a computer with Intel i7-11800H 2.30 GHz processor, 16 GB RAM, and an NVIDIA T1200 GPU 4 GB. However, these sets of plots will be similar and can be used to make decisions on the number of landmarks to consider for each step of EKF-SLAM to improve its real-time performance.











 ), and desired states (
), and desired states ( ). For (c) estimated position error for known landmarks and (d) estimated position error for unknown landmarks, estimation error (──), and boundary (
). For (c) estimated position error for known landmarks and (d) estimated position error for unknown landmarks, estimation error (──), and boundary (





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}