


Hydraulic Integrated Interconnected Regenerative Suspension: Sensitivity Analysis and Parameter Optimization

Abstract
:1. Introduction
2. Modeling
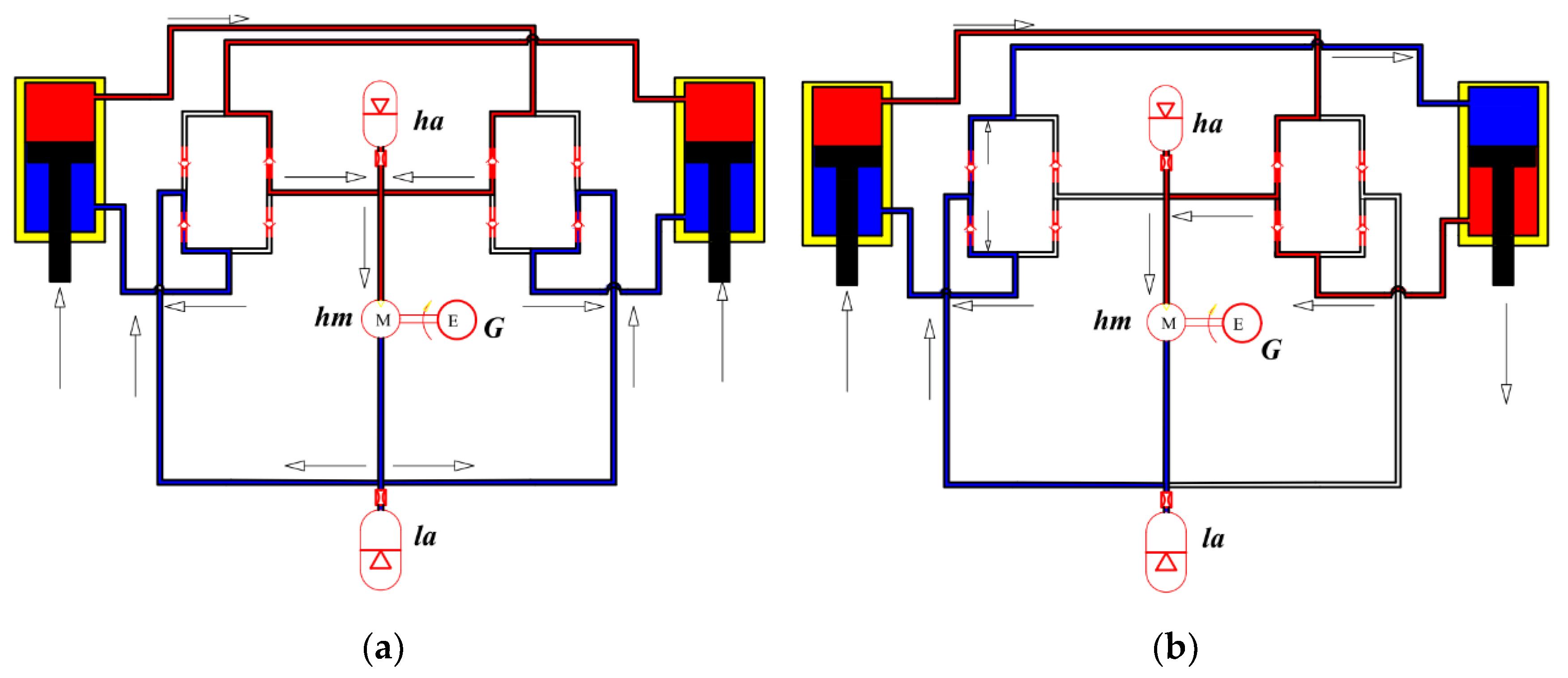
2.1. Working Principle of the HIIRS
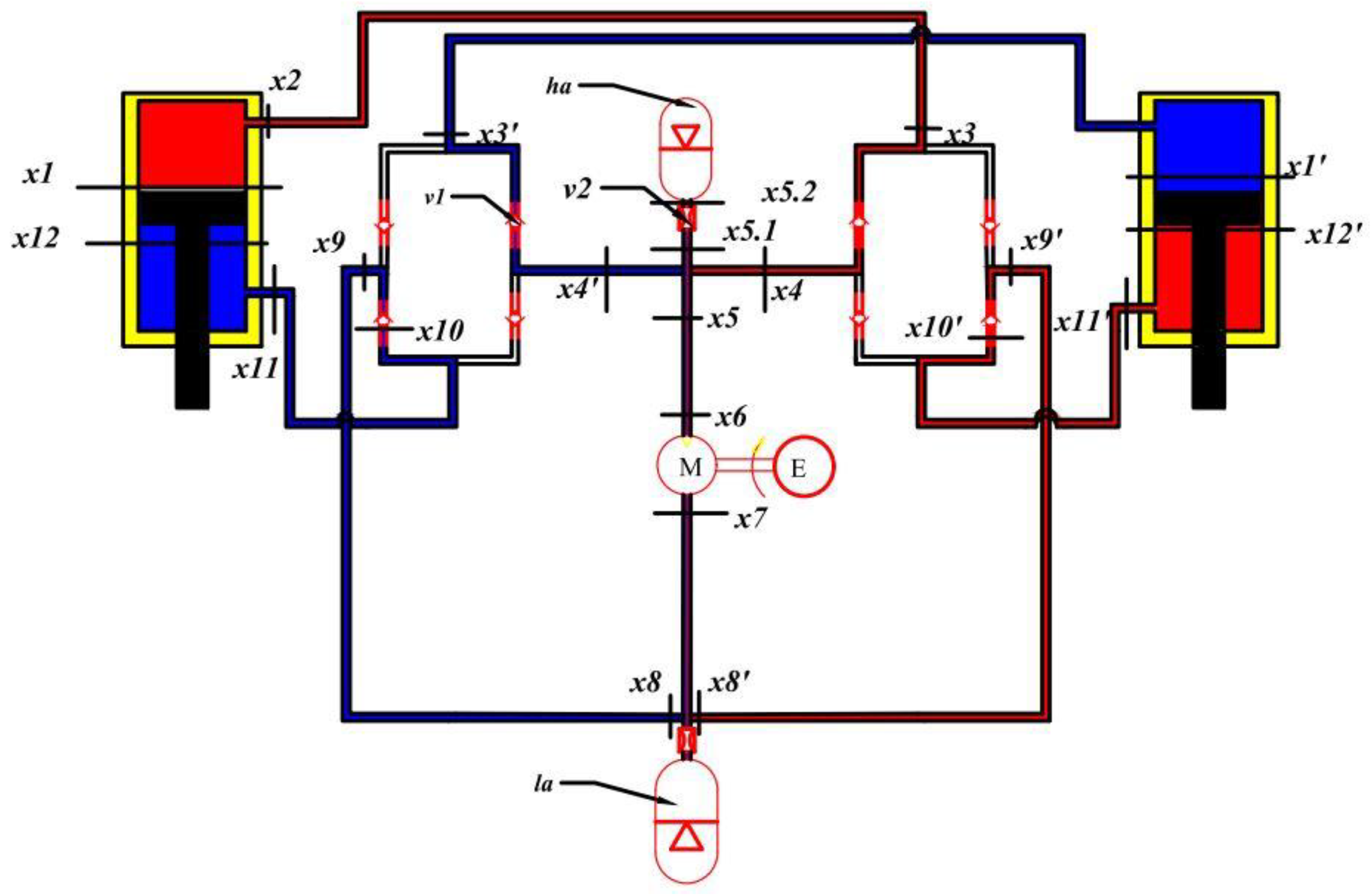
2.2. Modeling of the HIIRS System
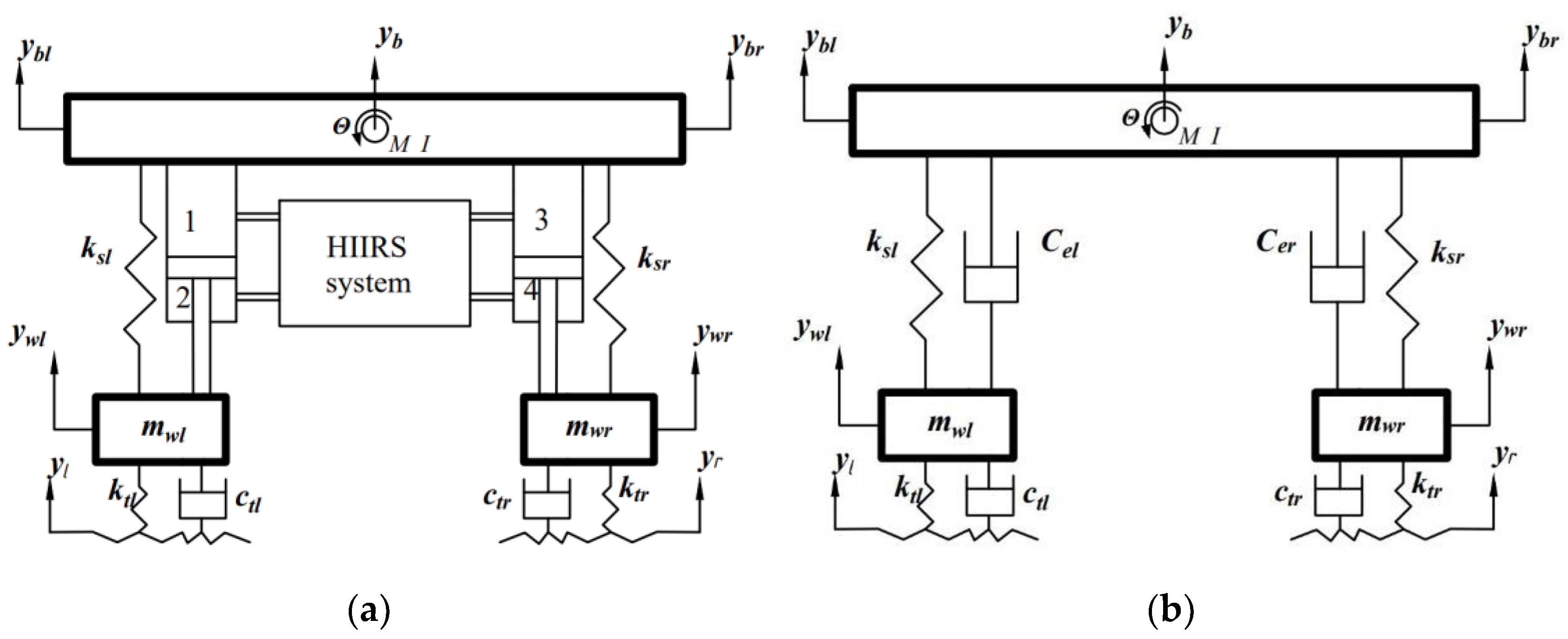
2.3. The Half-Vehicle Models with Various Suspensions
2.3.1. The Half-Vehicle Model with the HIIRS
2.3.2. The Half-Vehicle Model with a Conventional Spring-Damper Suspension
2.3.3. The Half-Vehicle Model with an Anti-Roll Bar Suspension
3. Performance Indices
3.1. Random Road Excitation
3.2. Ride Comfort
3.3. Road Holding
3.4. Energy-Harvesting Power
4. Sensitivity Analysis
4.1. Morris Method
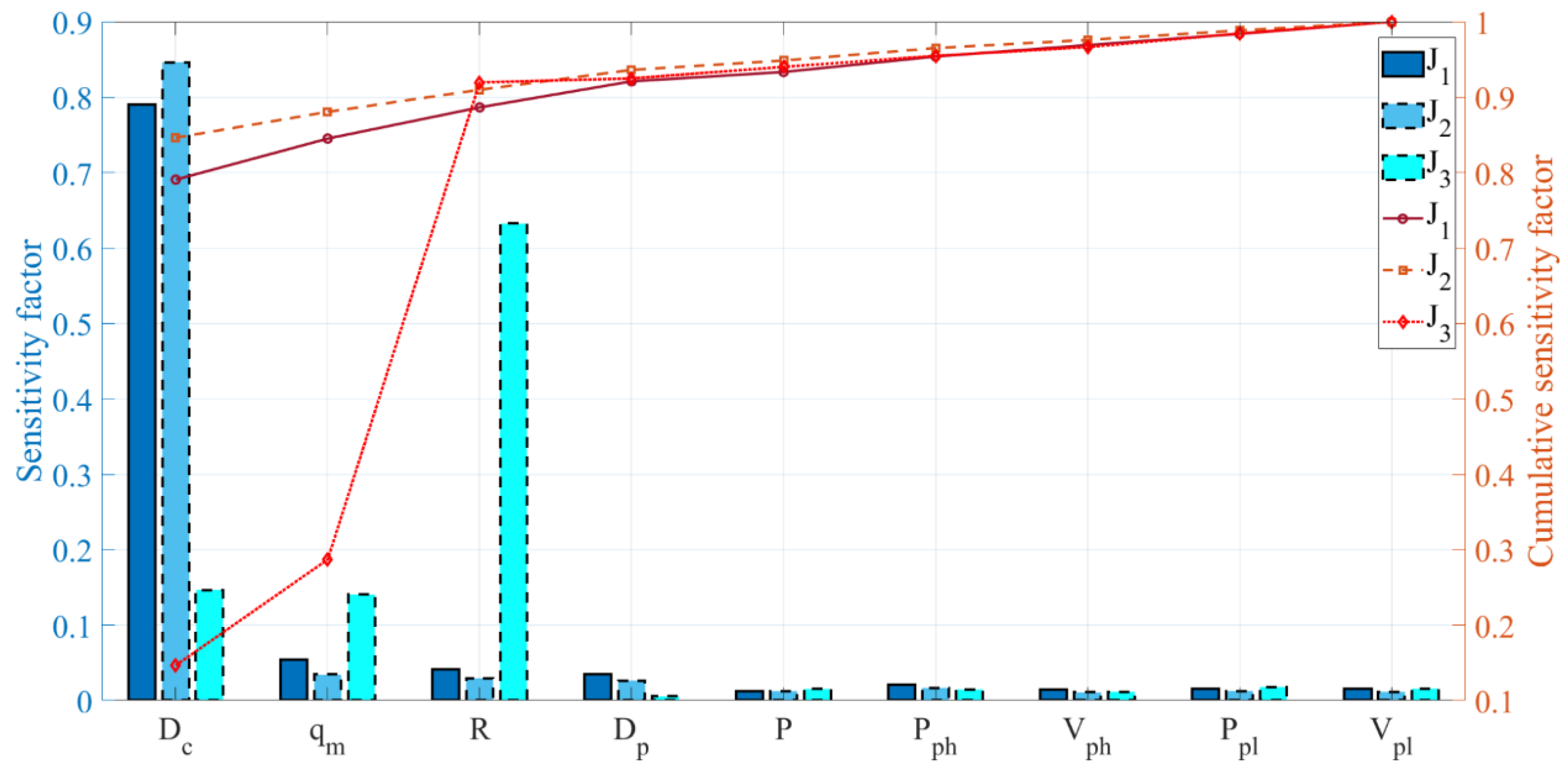
4.2. Sensitivity Analysis Result
5. Parameter Optimization
5.1. Single Objective Optimization
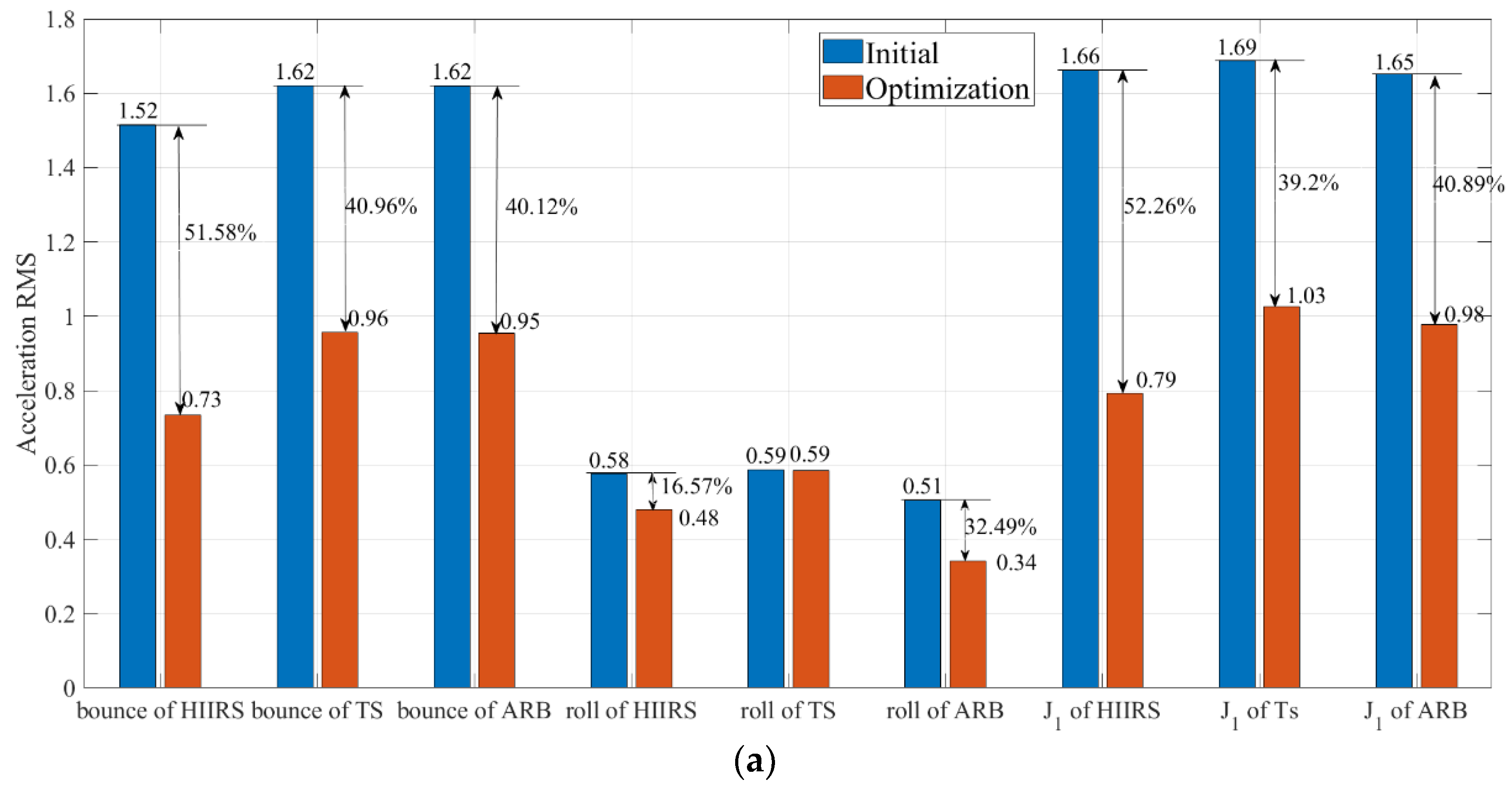
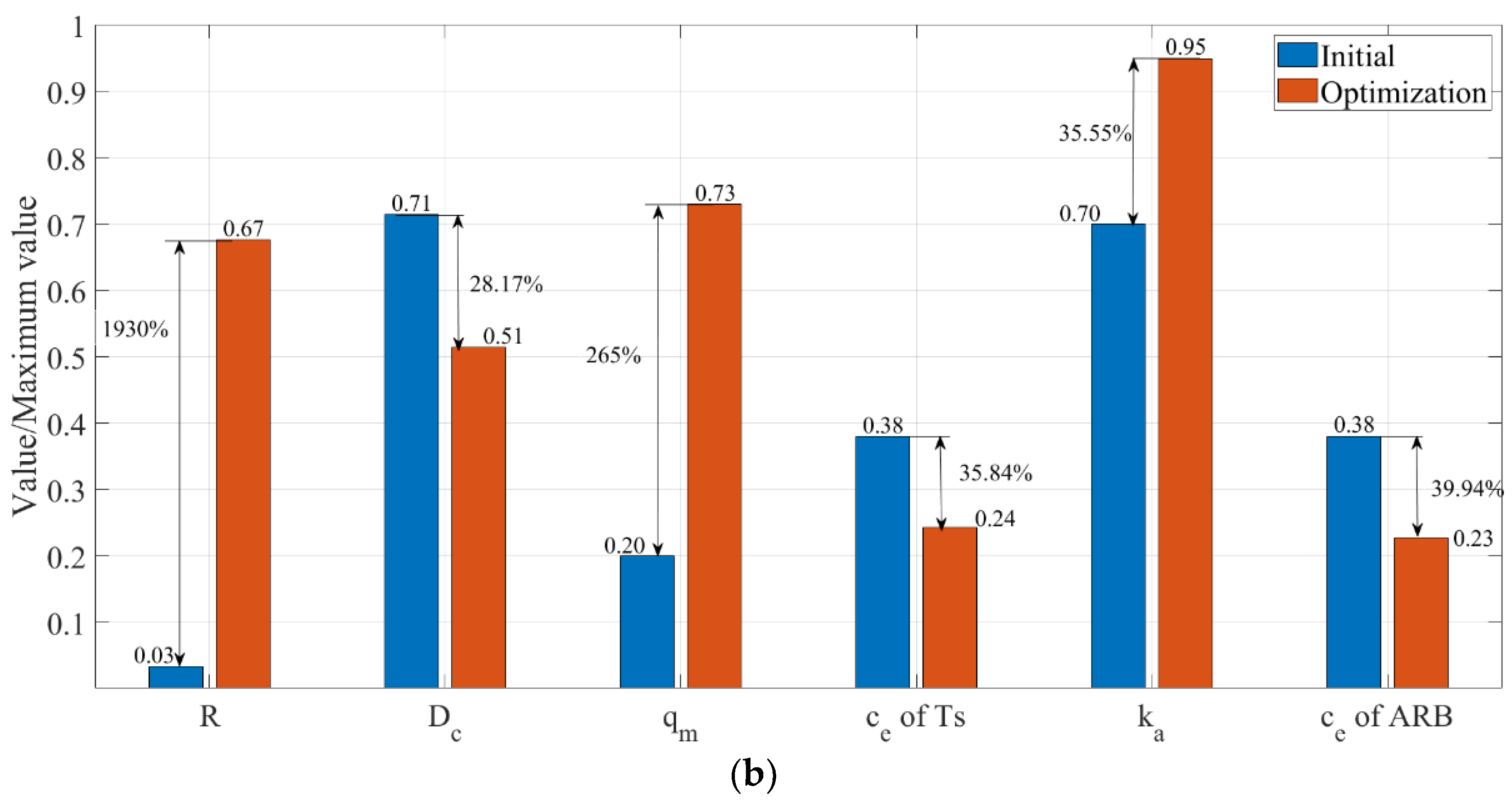
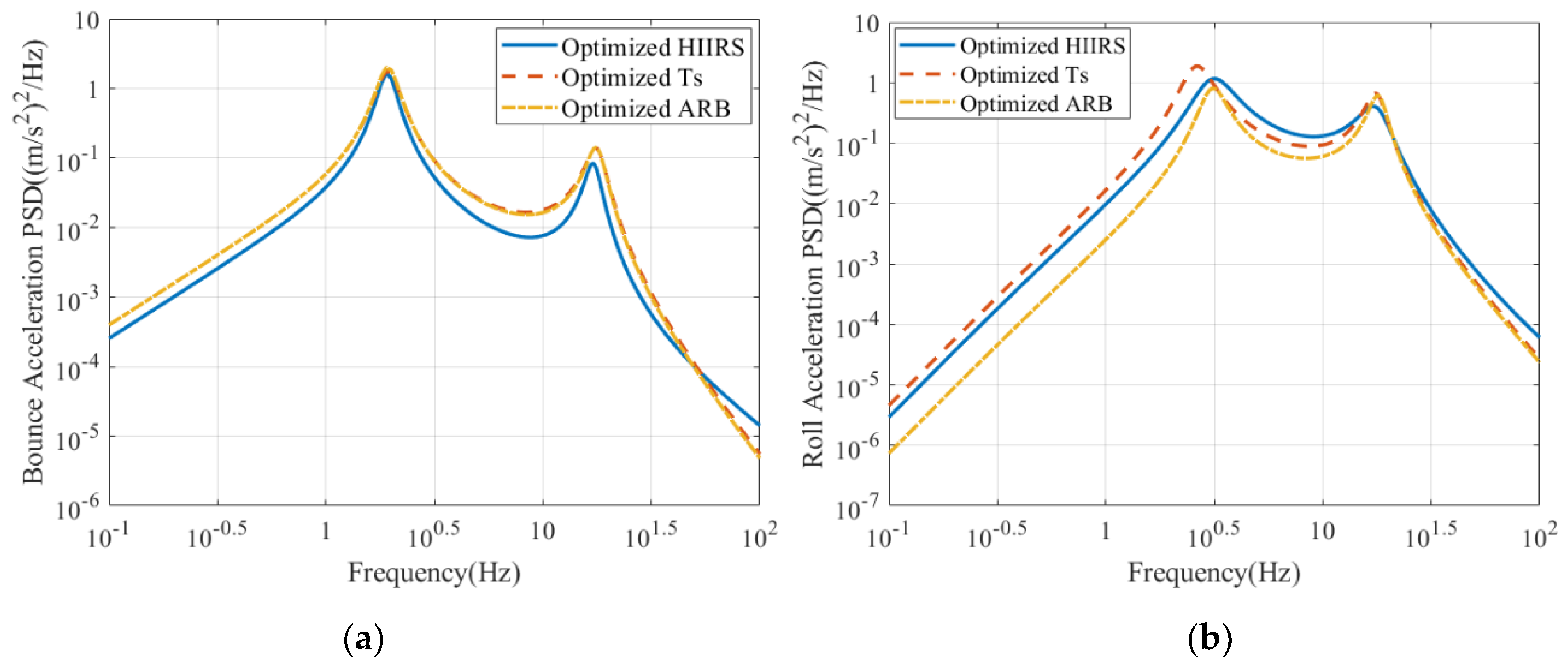
5.1.1. Optimization of Ride Comfort
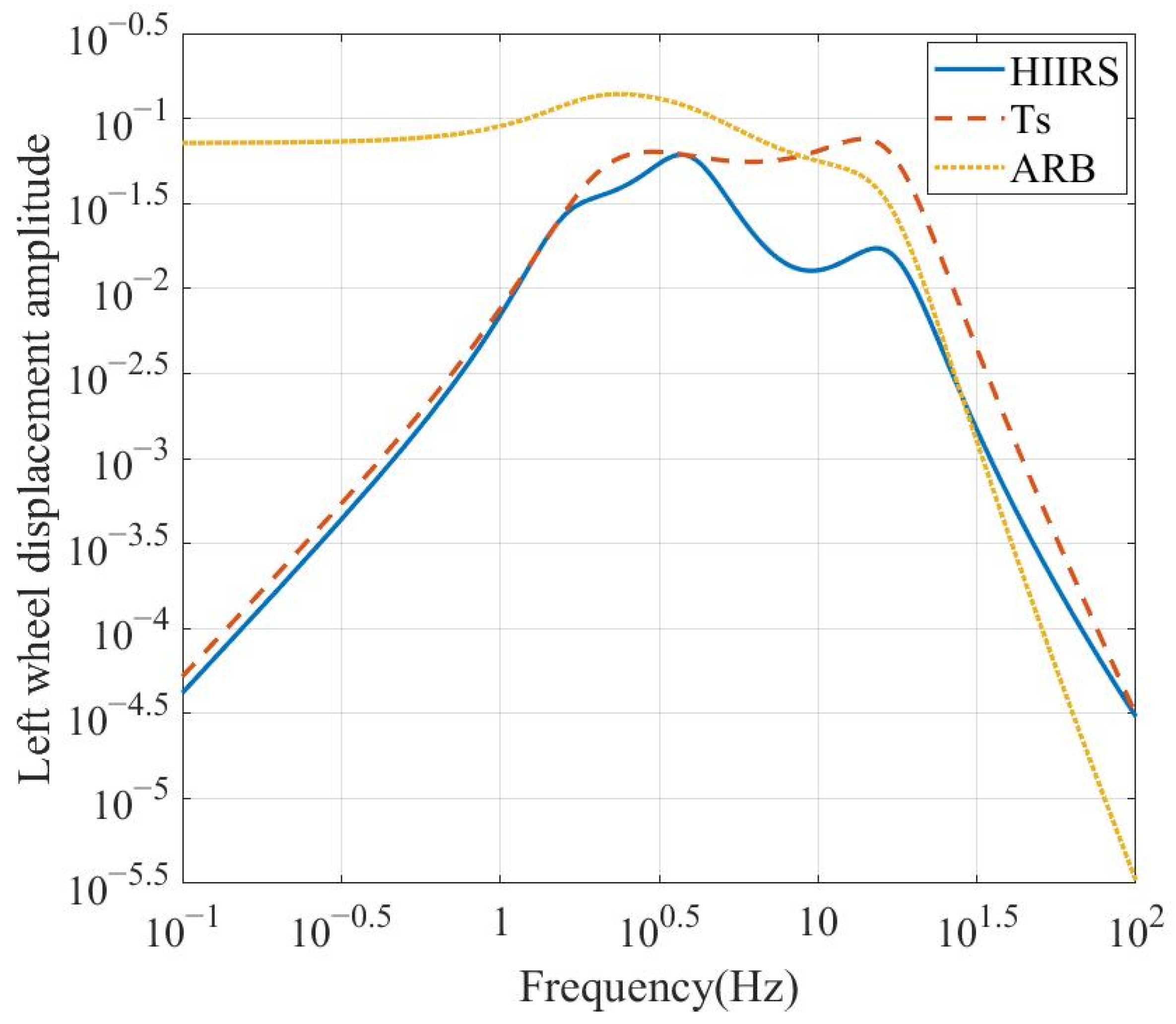
5.1.2. Optimization of Road Holding
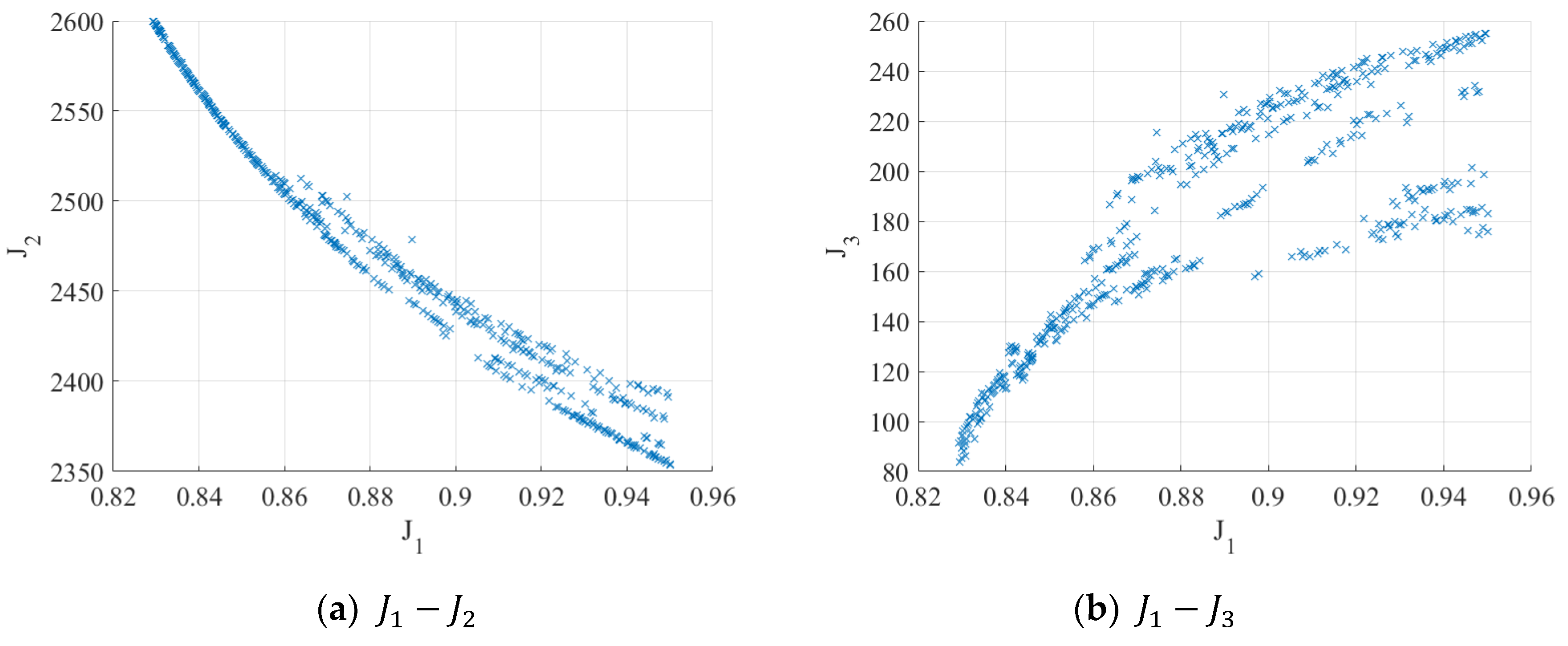
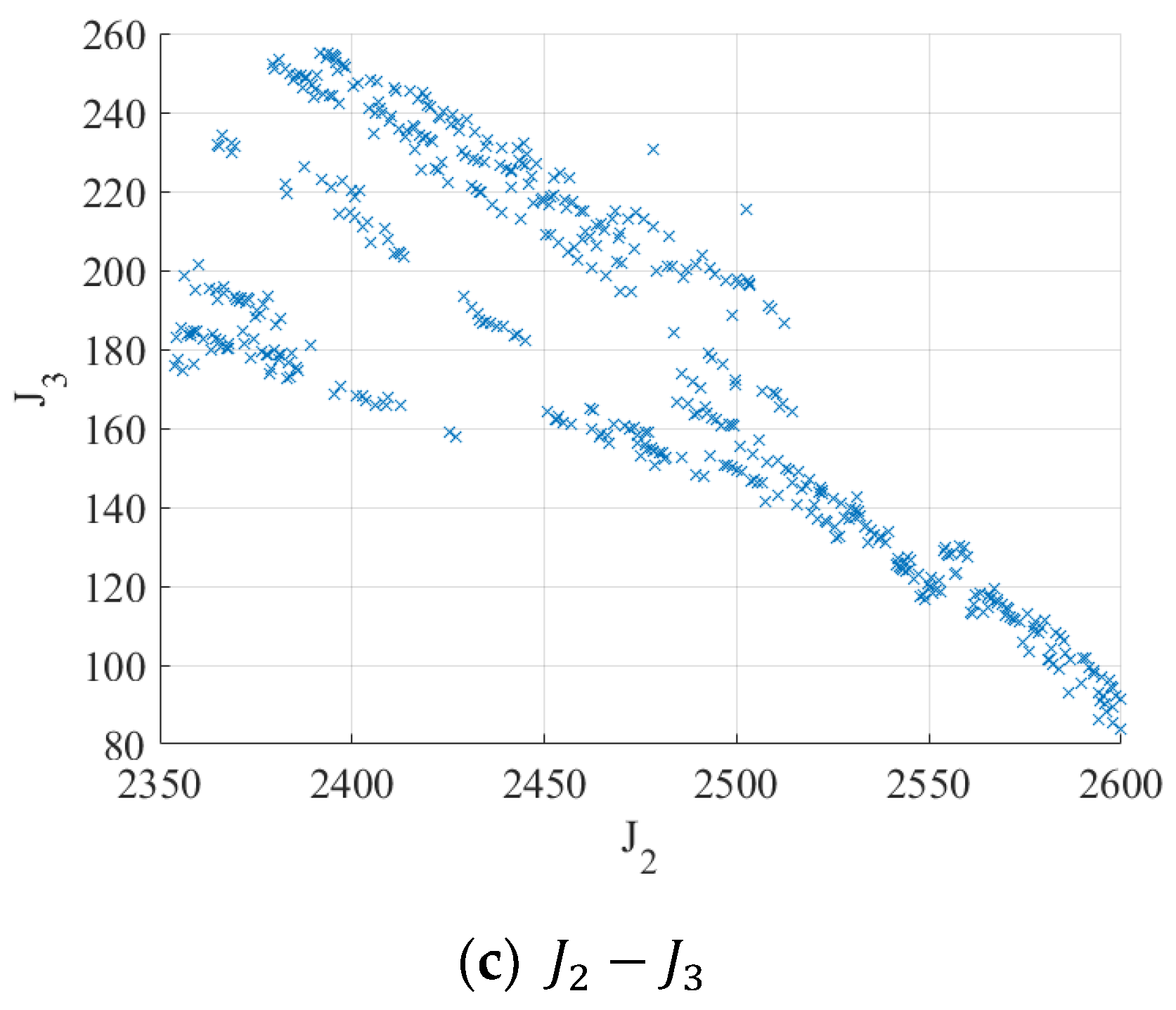
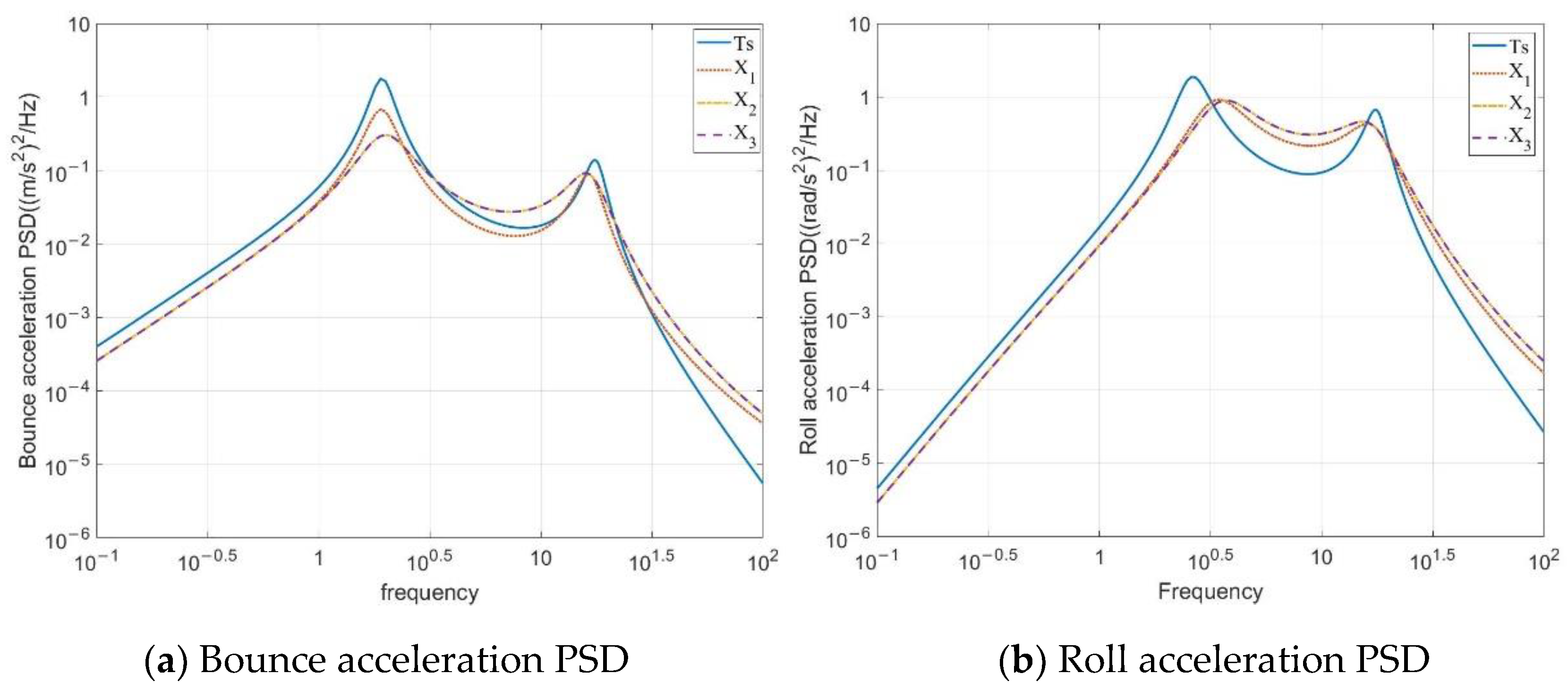
5.2. Multi-Objective Optimization
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Symbol | Description |
|---|---|---|---|
| HIIRS | Hydraulic integrated interconnected regenerative suspension | HIS | Hydraulic interconnected suspension |
| Ts | Traditional suspension | ARB | Anti-roll bar |
| Sprung mass | Pre-charge pressure of high-pressure accumulator | ||
| Unsprung mass (j = l, r = left, right) | Pre-charge gas volume of high-pressure accumulator | ||
| Sprung mass moment of inertia about the roll axis | Pre-charge pressure of low-pressure accumulator | ||
| Distance from c.g. to suspension strut (j = l, r = left, right) | Pre-charge gas volume of low-pressure accumulator | ||
| Mechanical suspension spring stiffness | Circuit external resistance | ||
| Tire stiffness | Inner diameter of hydraulic cylinder | ||
| Tire damping coefficient | Hydraulic motor displacement | ||
| Traditional suspension damping coefficient | Inner diameter of hydraulic pipeline | ||
| rms | Root-mean-square | Initial pressure of hydraulic system |
References
- United States Department of Transportation. Traffic Safety Facts Annual Report Tables, 2020, USA. Available online: https://cdan.nhtsa.gov/tsftables/tsfar.htm (accessed on 10 December 2022).
- Abdelkareem, M.A.; Makrahy, M.M.; Abd-El-Tawwab, A.M.; El-Razaz, A.; Ali, M.K.A.; Moheyeldein, M. An analytical study of the performance indices of articulated truck semi-trailer during three different cases to improve the driver comfort. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2017, 232, 84–102. [Google Scholar] [CrossRef]
- Abdelkareem, M.A.; Xu, L.; Ali, M.K.A.; El-Daly, A.-R.B.; Hassan, M.A.; Elagouz, A.; Bo, Y. Analysis of the prospective vibrational energy harvesting of heavy-duty truck suspensions: A simulation approach. Energy 2019, 173, 332–351. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, K.; Wang, D.; Chen, C.; Li, X. Energy conversion mechanism and regenerative potential of vehicle suspensions. Energy 2017, 119, 961–970. [Google Scholar] [CrossRef]
- Stone, E.J.; Cebon, D. An experimental semi-active anti-roll system. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2008, 222, 2415–2433. [Google Scholar] [CrossRef]
- Chen, Y.; Hou, Y.; Peterson, A.; Ahmadian, M. Failure mode and effects analysis of dual levelling valve airspring suspensions on truck dynamics. Veh. Syst. Dyn. 2018, 57, 617–635. [Google Scholar] [CrossRef]
- Chen, Y.; Peterson, A.W.; Ahmadian, M. Achieving anti-roll bar effect through air management in commercial vehicle pneumatic suspensions. Veh. Syst. Dyn. 2018, 57, 1775–1794. [Google Scholar] [CrossRef]
- Smith, W.; Zhang, N.; Jeyakumaran, J. Hydraulically interconnected vehicle suspension: Theoretical and experimental ride analysis. Veh. Syst. Dyn. 2010, 48, 41–64. [Google Scholar] [CrossRef]
- Guowei, D.; Wenhao, Y.; Zhongxing, L.; Khajepour, A.; Senqi, T. Sliding Mode Control of Laterally Interconnected Air Suspensions. Appl. Sci. 2020, 10, 4320. [Google Scholar] [CrossRef]
- Zhang, N.; Smith, W.A.; Jeyakumaran, J. Hydraulically interconnected vehicle suspension: Background and modelling. Veh. Syst. Dyn. 2010, 48, 17–40. [Google Scholar] [CrossRef]
- Cao, D.; Rakheja, S.; Su, C.Y. Dynamic analyses of roll plane interconnected hydro-pneumatic suspension systems. Int. J. Veh. Des. 2008, 47, 51–80. [Google Scholar] [CrossRef]
- Cao, D.; Rakheja, S.; Su, C.Y. Dynamic analyses of heavy vehicle with pitch-interconnected suspensions. Int. J. Heavy Veh. Syst. 2008, 15, 272–308. [Google Scholar] [CrossRef]
- Ding, F.; Han, X.; Luo, Z.; Zhang, N. Modelling and characteristic analysis of tri-axle trucks with hydraulically interconnected suspensions. Veh. Syst. Dyn. 2012, 50, 1877–1904. [Google Scholar] [CrossRef]
- Zhu, H.; Li, Y.; Shen, W.; Zhu, S. Mechanical and energy-harvesting model for electromagnetic inertial mass dampers. Mech. Syst. Signal Process. 2018, 120, 203–220. [Google Scholar] [CrossRef]
- Yan, S.; Sun, W. Self-powered suspension criterion and energy regeneration implementation scheme of motor-driven active suspension. Mech. Syst. Signal Process. 2017, 94, 297–311. [Google Scholar] [CrossRef]
- Wang, R.; Gu, F.; Cattley, R.; Ball, A.D. Modelling, Testing and Analysis of a Regenerative Hydraulic Shock Absorber System. Energies 2016, 9, 386. [Google Scholar] [CrossRef]
- Guo, S.; Xu, L.; Liu, Y.; Guo, X.; Zuo, L. Modeling and Experiments of a Hydraulic Electromagnetic Energy-Harvesting Shock Absorber. IEEE/ASME Trans. Mechatron. 2017, 22, 2684–2694. [Google Scholar] [CrossRef]
- Abdelkareem, M.A.; Xu, L.; Ali, M.K.A.; Elagouz, A.; Mi, J.; Guo, S.; Liu, Y.; Zuo, L. Vibration energy harvesting in automotive suspension system: A detailed review. Appl. Energy 2018, 229, 672–699. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, X.; Zhan, M.; Guo, K.; Zhao, F.; Liu, Z. Study on a novel hydraulic pumping regenerative suspension for vehicles. J. Frankl. Inst. 2015, 352, 485–499. [Google Scholar] [CrossRef]
- Wang, R.; Sun, D.; Ding, R.; Meng, X. Multi-mode Design and Constant Current Control of Hydraulically Interconnected Energy-Regenerative Suspension. In Proceedings of the CIAC 2019: Proceedings of 2019 Chinese Intelligent Automation Conference, Jiangsu, China, 20–22 September 2019; Springer: Singapore, 2019; pp. 364–372. [Google Scholar] [CrossRef]
- Zou, J.; Guo, X.; Abdelkareem, M.A.; Xu, L.; Zhang, J. Modelling and ride analysis of a hydraulic interconnected suspension based on the hydraulic energy regenerative shock absorbers. Mech. Syst. Signal Process. 2019, 127, 345–369. [Google Scholar] [CrossRef]
- Guo, S.; Chen, L.; Wang, X.; Zou, J.; Hu, S. Hydraulic Integrated Interconnected Regenerative Suspension: Modeling and Characteristics Analysis. Micromachines 2021, 12, 733. [Google Scholar] [CrossRef]
- Qin, B.; Chen, Y.; Chen, Z.; Zuo, L. Modeling, bench test and ride analysis of a novel energy-harvesting hydraulically interconnected suspension system. Mech. Syst. Signal Process. 2021, 166, 108456. [Google Scholar] [CrossRef]
- Shen, Y.; Hua, J.; Wu, B.; Chen, Z.; Xiong, X.; Chen, L. Optimal design of the vehicle mechatronic ISD suspension system using the structure-immittance approach. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 236, 512–521. [Google Scholar] [CrossRef]
- Tan, B.; Wang, S.; Zhang, B.; Li, B.; Zhang, N.; Qi, H. Sensitivity stratification concept and hierarchical multi-objective optimisation for an ambulance with hydraulically interconnected suspension and stretcher-human body model. Veh. Syst. Dyn. 2020, 60, 540–568. [Google Scholar] [CrossRef]
- Zhou, Q.; Guo, S.; Xu, L.; Guo, X.; Williams, H.; Xu, H.; Yan, F. Global Optimization of the Hydraulic-Electromagnetic Energy-Harvesting Shock Absorber for Road Vehicles with Human-Knowledge-Integrated Particle Swarm Optimization Scheme. IEEE/ASME Trans. Mechatron. 2021, 26, 1225–1235. [Google Scholar] [CrossRef]
- Li, S.; Xu, J.; Gao, H.; Tao, T.; Mei, X. Safety probability based multi-objective optimization of energy-harvesting suspension system. Energy 2020, 209, 118362. [Google Scholar] [CrossRef]
- Dodds, C.J.; Robson, J.D. The description of road surface roughness. J. Sound Vib. 1973, 31, 175–183. [Google Scholar] [CrossRef]
- Heath, A. Application of the isotropic road roughness assumption. J. Sound Vib. 1987, 115, 131–144. [Google Scholar] [CrossRef]
- ISO 2631-1:1997; Mechanical Vibration and Shock: Evaluation of Human Exposure to Whole-Body Vibration. Part 1: General Requirements. International Organization for Standardization: Geneva, Switzerland, 1997.
- Morris, M.D. Factorial Sampling Plans for Preliminary Computational Experiments. Technometrics 1991, 33, 161–174. [Google Scholar] [CrossRef]
- Zou, J.; Guo, S.; Guo, X.; Xu, L.; Wu, Y.; Pan, Y. Hydraulic integrated interconnected regenerative suspension: Modeling and mode-decoupling analysis. Mech. Syst. Signal Process. 2022, 172, 108998. [Google Scholar] [CrossRef]
- Mirjalili, S. Evolutionary Algorithms and Neural Networks; Springer: Cham, Switzerland, 2019; pp. 43–55. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A fast elitist non-dominated sorting genetic algorithm for multi-objective optimization: NSGA-II. In Proceedings of the International Conference on Parallel Problem Solving from Nature, Paris, France, 18–20 September 2000; Springer: Berlin/Heidelberg, Germany, 2000; pp. 849–858. [Google Scholar] [CrossRef]



| Symbol | Value | Units | Description |
|---|---|---|---|
| 1400 | kg | Sprung mass | |
| 105 | kg | Unsprung mass (j = l, r = left, right) | |
| 523 | Kgm2 | Sprung mass moment of inertia about the roll axis | |
| 0.825 | M | Distance from c.g. to suspension strut (j = l, r = left, right) | |
| 112 | kN/m | Mechanical suspension spring stiffness | |
| 1200 | kN/m | Tire stiffness | |
| 300 | Ns/m | Tire damping coefficient | |
| 3800 | Ns/m | Traditional suspension damping coefficient |
| Impedance Matrix | Description | Elements |
|---|---|---|
| Impedance matrix of upper chamber of hydraulic cylinder | ||
| Impedance matrix of hydraulic pipeline | ||
| Impedance matrix of check valve | ||
| Impedance matrix of high-pressure accumulator unit | , | |
| Identity matrix | ||
| Impedance matrix of energy harvesting unit | , | |
| Identity matrix | ||
| Impedance matrix of low-pressure accumulator unit | ||
| Impedance matrix of check valve | ||
| Impedance matrix of hydraulic pipeline | ||
| Impedance matrix of upper chamber of hydraulic cylinder |
| Symbol | Range | Units | Description |
|---|---|---|---|
| Pa | Pre-charge pressure of high-pressure accumulator | ||
| m3 | Pre-charge gas volume of high-pressure accumulator | ||
| Pa | Pre-charge pressure of low-pressure accumulator | ||
| m3 | Pre-charge gas volume of low-pressure accumulator | ||
| Circuit external resistance | |||
| [10, 70] | mm | Inner diameter of hydraulic cylinder | |
| [] | m3/rev | Hydraulic motor displacement | |
| [10, 30] | mm | Inner diameter of hydraulic pipeline | |
| Pa | Initial pressure of hydraulic system |
| Parameter | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Sensitivity | 0.7907 | 0.0544 | 0.0444 | 0.0335 | 0.0124 | 0.0206 | 0.014 | 0.014 | 0.016 |
| Sensitivity | 0.8462 | 0.0343 | 0.0293 | 0.0263 | 0.0124 | 0.0165 | 0.0107 | 0.0126 | 0.0115 |
| Sensitivity | 0.1466 | 0.1405 | 0.6325 | 0.0054 | 0.0153 | 0.0146 | 0.0116 | 0.0179 | 0.0156 |
| Parameters | Variation Range | Initial | Optimization Solution |
|---|---|---|---|
| Resistance | |||
| Inner diameter of hydraulic cylinder | |||
| Displacement of hydraulic motor | |||
| Damping coefficient in TS | |||
| Anti−roll bar stiffness in ARB | |||
| Damping coefficient in ARB | 3800 | 2282.3 | |
| Bounce acceleration RMS of HIIRS | 1.5155 | 0.7338 | |
| Roll acceleration RMS of HIIRS | 0.5762 | 0.4807 | |
| Total weighted acceleration RMS of HIIRS | 1.6628 | 0.7938 | |
| Bounce acceleration RMS of TS | 1.6205 | 0.9567 | |
| Roll acceleration RMS of TS | 0.5880 | 0.5855 | |
| Total weighted acceleration RMS of TS | 1.6866 | 1.0254 | |
| Bounce acceleration RMS of ARB | 1.6205 | 0.9541 | |
| Roll acceleration RMS of ARB | 0.5060 | 0.3416 | |
| Total weighted acceleration RMS of ARB | 1.6515 | 0.9781 |
| Parameters | Variation Range | Initial | Optimization Solution |
|---|---|---|---|
| Resistance | 10 | 162 | |
| Inner diameter of hydraulic cylinder | |||
| Displacement of hydraulic motor | |||
| Damping coefficient of Ts | 3800 | 8541 | |
| Damping coefficient of ARB | 3800 | 9309.3 | |
| Anti−roll bar stiffness | |||
| Tire dynamic load RMS of HIIRS | 2369.1 | 2172.2 | |
| Tire dynamic load RMS of TS | 3150.9 | 2696.9 | |
| Tire dynamic load RMS of ARB | 3110.5 | 2646.1 |
| Optimization Objectives | Ride Comfort | Road Holding |
|---|---|---|
| Resistance | 203 | 162 |
| Inner diameter of hydraulic cylinder | ||
| Displacement of hydraulic motor | ||
| Ride comfort objective function | ||
| Road holding objective function |
| Parameter | |||
|---|---|---|---|
| Resistance R | 4.5208 | 3.86 | 5.1703 |
| 0.039 | 0.0412 | 0.0388 | |
| Bounce acceleration RMS | 0.7757 | 0.9050 | 0.9050 |
| 0.4699 | 0.4769 | 0.4769 | |
| Total acceleration RMS | 0.8294 | 0.95 | 0.9494 |
| Tire dynamic load RMS | 2600 | 2353.7 | 2393.6 |
| Energy-harvesting power | 83.73 | 175.8 | 255.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, S.; Chen, L.; Pan, Y.; Wang, X.; Tan, G. Hydraulic Integrated Interconnected Regenerative Suspension: Sensitivity Analysis and Parameter Optimization. Electronics 2023, 12, 891. https://doi.org/10.3390/electronics12040891
Guo S, Chen L, Pan Y, Wang X, Tan G. Hydraulic Integrated Interconnected Regenerative Suspension: Sensitivity Analysis and Parameter Optimization. Electronics. 2023; 12(4):891. https://doi.org/10.3390/electronics12040891
Chicago/Turabian StyleGuo, Sijing, Liang Chen, Yu Pan, Xuxiang Wang, and Gangfeng Tan. 2023. "Hydraulic Integrated Interconnected Regenerative Suspension: Sensitivity Analysis and Parameter Optimization" Electronics 12, no. 4: 891. https://doi.org/10.3390/electronics12040891
APA StyleGuo, S., Chen, L., Pan, Y., Wang, X., & Tan, G. (2023). Hydraulic Integrated Interconnected Regenerative Suspension: Sensitivity Analysis and Parameter Optimization. Electronics, 12(4), 891. https://doi.org/10.3390/electronics12040891