




Next-Generation IoT: Harnessing AI for Enhanced Localization and Energy Harvesting in Backscatter Communications

 ,
,  ,
,  ,
,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- 1.
- A comprehensive overview of the current state of localisation with backscatter and its significance in future 6G networks.
- 2.
- Implementing a testbed that allows the evaluation of RFID-based BSC technologies in a complex indoor environment. The RF signal strength at different positions within the testbed and its effect on the result is also examined.
- 3.
- Development and evaluation of the RFID-based machine learning model for indoor localisation and occupancy monitoring
- 4.
- Experimental demonstration of indoor localisation along with a detailed RF power survey, evidencing the possibility of having localisation and energy harvesting in the same space, including a discussion on the effect of varying parameters.
- 5.
- An outlook on applying similar methods in the future to create energy-efficient IoT networks, leveraging the unique benefits of BSC technology.
2. The State of the Art in Backscatter Communication
3. Localisation for Backscatter Communications
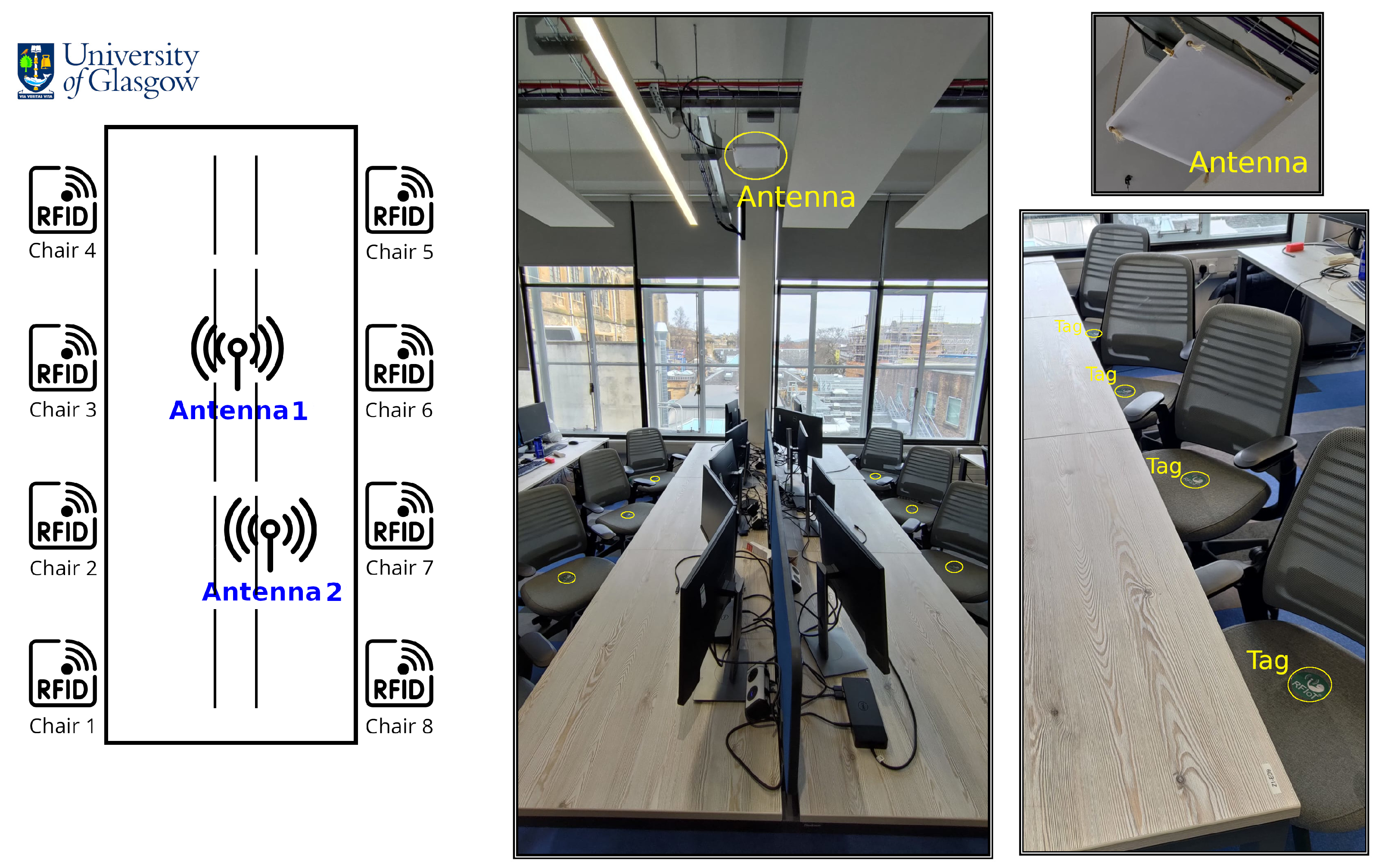
System Model: Testbed Environment
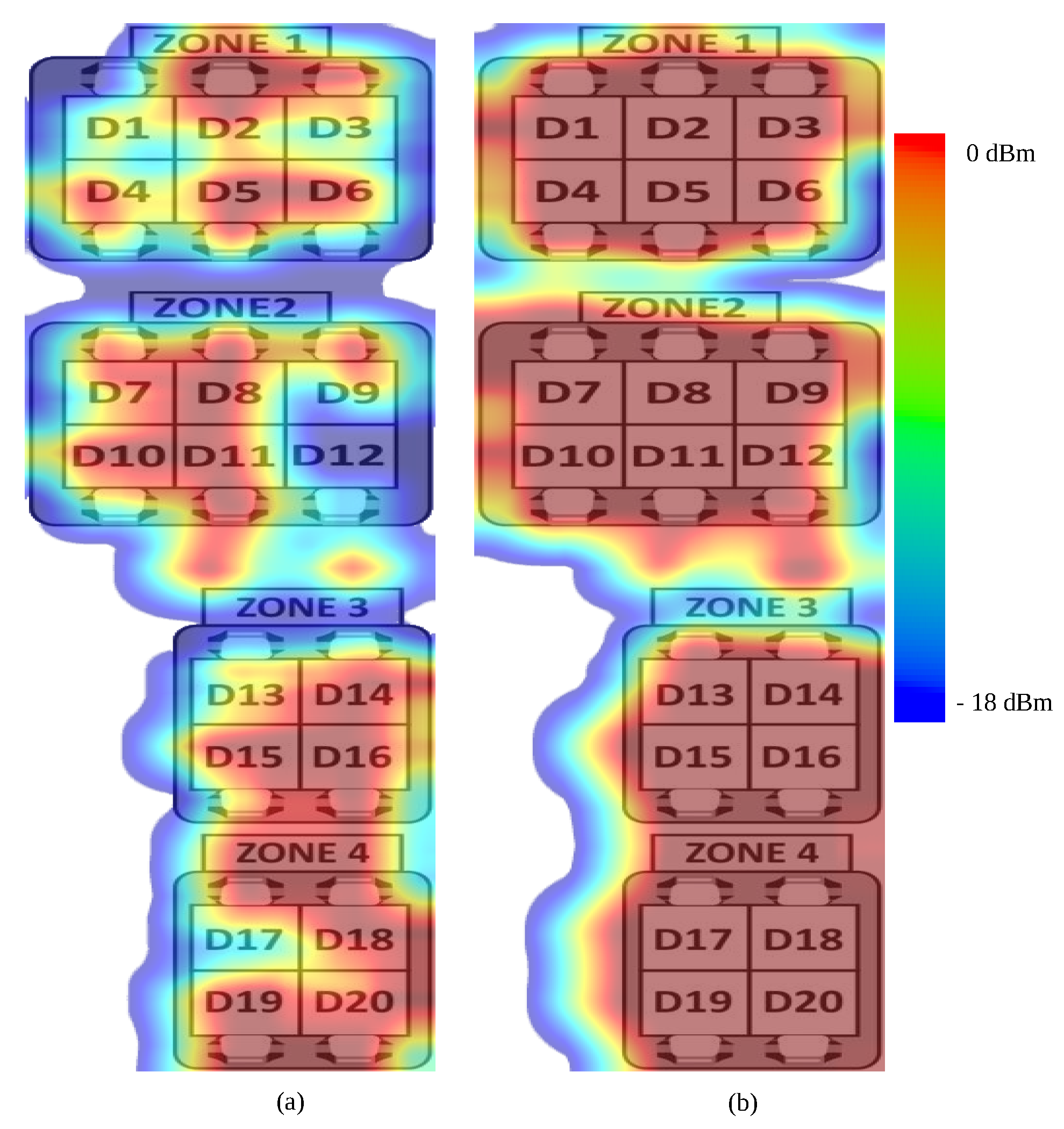
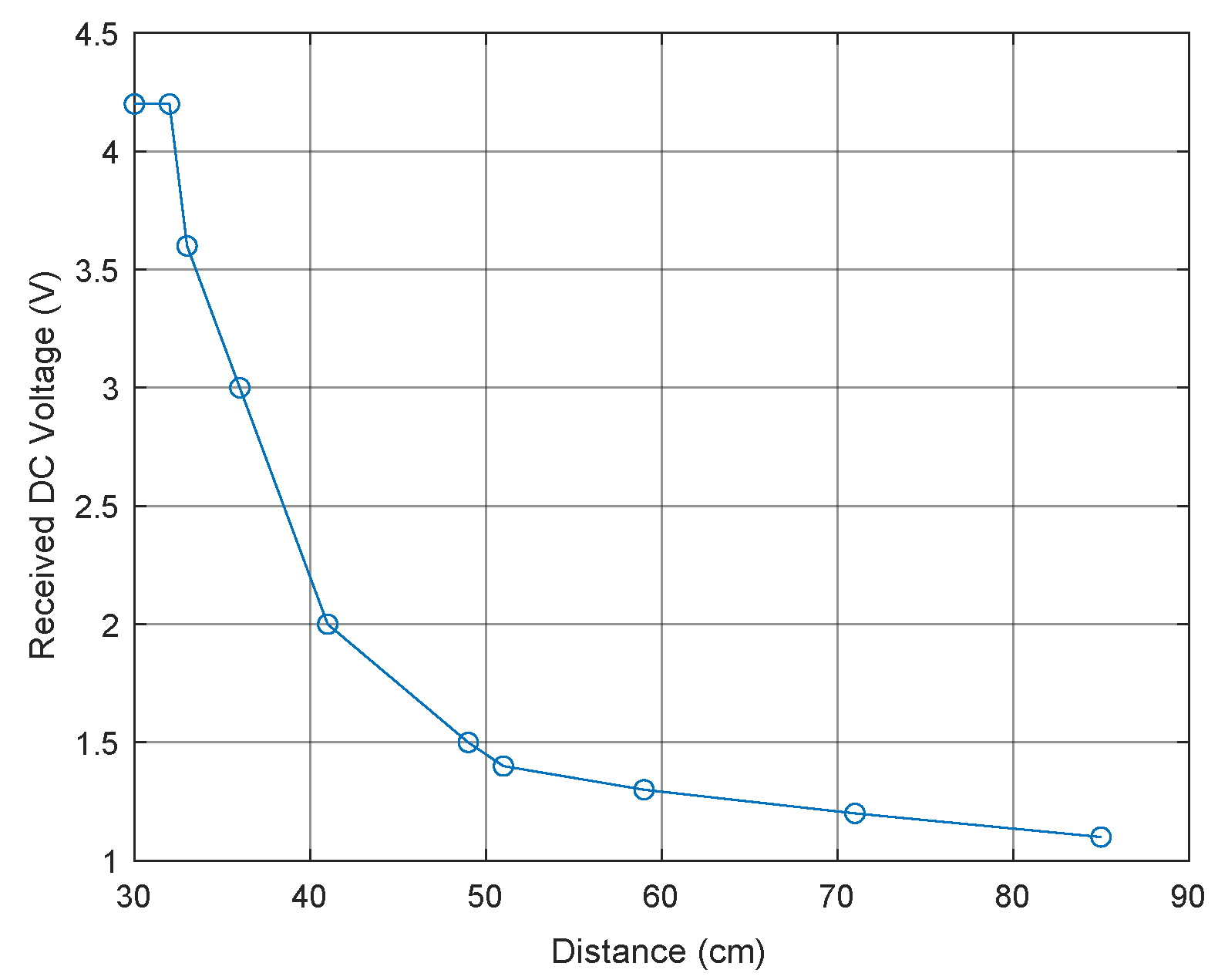
4. Energy Harvesting Potential in an RFID Sensing Network
4.1. RF Energy Harvesting Literature
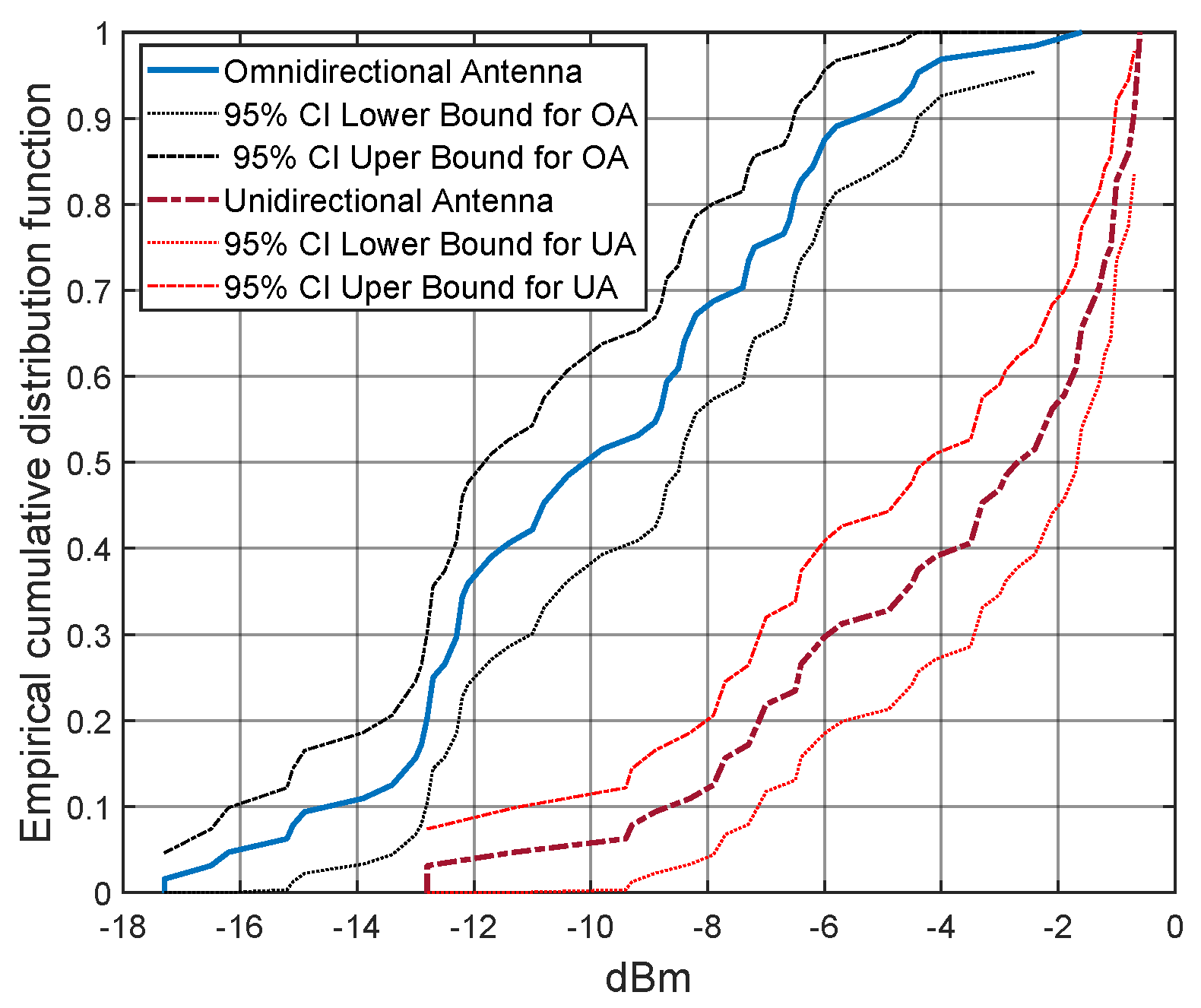
4.2. Energy Level Analysis
5. AI-Enabled Localisation Experimentation
| Algorithm 1: Supervised ML Training |
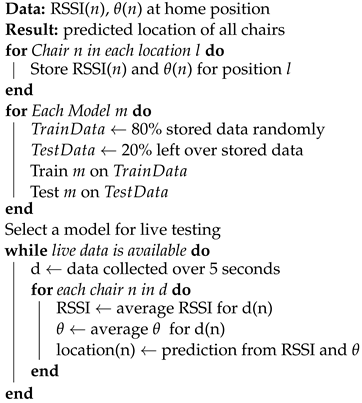 |
5.1. Data Collection
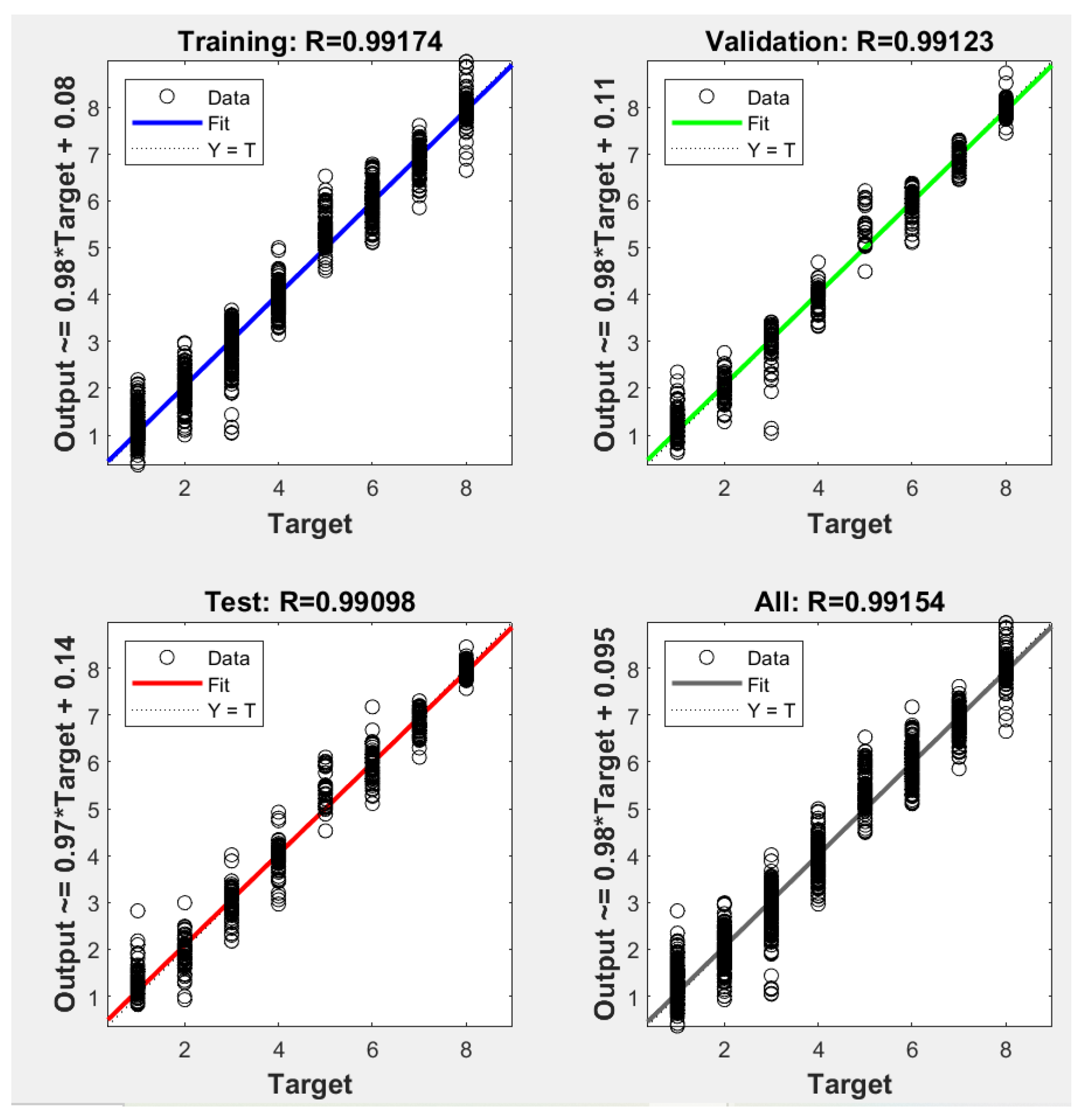
5.2. Algorithm Implementation
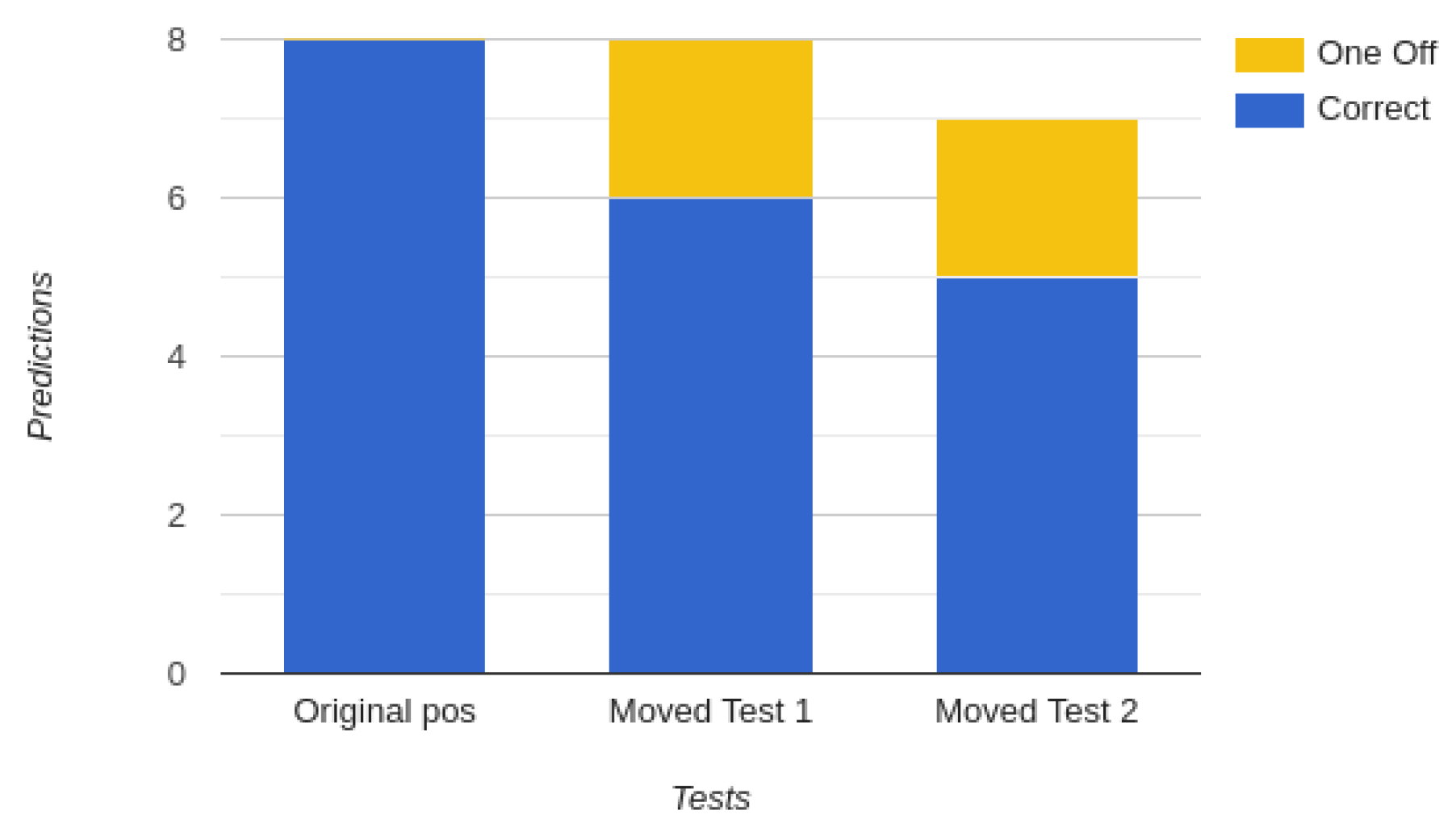
5.3. Results
5.4. Data Analysis
6. Evaluation of Performance
7. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Toro, U.S.; Wu, K.; Leung, V.C.M. Backscatter Wireless Communications and Sensing in Green Internet of Things. IEEE Trans. Green Commun. Netw. 2022, 6, 37–55. [Google Scholar] [CrossRef]
- Kellogg, B.; Parks, A.; Gollakota, S.; Smith, J.R.; Wetherall, D. Wi-Fi Backscatter: Internet Connectivity for RF-powered Devices. In Proceedings of the 2014 ACM Conference on SIGCOMM, Chicago, IL, USA, 17–22 August 2014; pp. 607–618. [Google Scholar] [CrossRef]
- Zhou, Z.; Gao, A.; Zhang, Q.; Wu, W.; Wu, S.; Tsui, P.H. Ultrasound Backscatter Envelope Statistics Parametric Imaging for Liver Fibrosis Characterization: A Review. Ultrason. Imaging 2020, 42, 92–109. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Zhang, Q.; Wu, W.; Wu, S.; Tsui, P.H. Hepatic Steatosis Assessment Using Quantitative Ultrasound Parametric Imaging Based on Backscatter Envelope Statistics. Appl. Sci. 2019, 9, 661. [Google Scholar] [CrossRef]
- D’Arco, P.; De Santis, A. On Ultralightweight RFID Authentication Protocols. IEEE Trans. Dependable Secur. Comput. 2011, 8, 548–563. [Google Scholar] [CrossRef]
- Wang, P.; Yan, Z.; Zeng, K. BCAuth: Physical Layer Enhanced Authentication and Attack Tracing for Backscatter Communications. IEEE Trans. Inf. Forensics Secur. 2022, 17, 2818–2834. Available online: https://ieeexplore.ieee.org/abstract/document/9845476 (accessed on 20 August 2023). [CrossRef]
- Mehmood, A.; Aman, W.; Rahman, M.M.U.; Imran, M.A.; Abbasi, Q.H. Preventing Identity Attacks in RFID Backscatter Communication Systems: A Physical-layer Approach. In Proceedings of the 2020 International Conference on UK-China Emerging Technologies (UCET), Glasgow, UK, 20–21 August 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Gupta, V.; Tripathi, S.; De, S. Green Sensing and Communication: A Step towards Sustainable IoT Systems. J. Indian Inst. Sci. 2020, 100, 383–398. [Google Scholar] [CrossRef]
- Shah, S.; Choi, K.; Hasan, S.; Chung, M. Energy harvesting and information processing in two-way multiplicative relay networks. Electron. Lett. 2016, 52, 751–753. [Google Scholar] [CrossRef]
- Jameel, F.; Zeb, S.; Khan, W.U.; Hassan, S.A.; Chang, Z.; Liu, J. NOMA-Enabled Backscatter Communications: Toward Battery-Free IoT Networks. IEEE Internet Things Mag. 2020, 3, 95–101. [Google Scholar] [CrossRef]
- Shah, S.T.; Choi, K.W.; Hasan, S.F.; Chung, M.Y. Throughput analysis of two-way relay networks with wireless energy harvesting capabilities. Ad Hoc Netw. 2016, 53, 123–131. [Google Scholar] [CrossRef]
- Chen, H.; Sarieddeen, H.; Ballal, T.; Wymeersch, H.; Alouini, M.S.; Al-Naffouri, T.Y. A Tutorial on Terahertz-Band Localization for 6G Communication Systems. IEEE Commun. Surv. Tutorials 2022, 24, 1780–1815. [Google Scholar] [CrossRef]
- Shah, S.T.; Choi, K.W.; Lee, T.J.; Chung, M.Y. Outage Probability and Throughput Analysis of SWIPT Enabled Cognitive Relay Network with Ambient Backscatter. IEEE Internet Things J. 2018, 5, 3198–3208. [Google Scholar] [CrossRef]
- Lotti, M.; Pasolini, G.; Guerra, A.; Guidi, F.; D’Errico, R.; Dardari, D. Radio SLAM for 6G Systems at THz Frequencies: Design and Experimental Validation. arXiv 2022, arXiv:2212.12388. [Google Scholar] [CrossRef]
- Nguyen, C.L.; Georgiou, O.; Gradoni, G.; Di Renzo, M. Wireless Fingerprinting Localization in Smart Environments Using Reconfigurable Intelligent Surfaces. IEEE Access 2021, 9, 135526–135541. [Google Scholar] [CrossRef]
- Ullah, M.H.; Gelli, G.; Verde, F. Visible Light Backscattering with Applications to Communication and Localization in Healthcare: A Survey. Procedia Comput. Sci. 2022, 203, 745–752. [Google Scholar] [CrossRef]
- Vasisht, D.; Zhang, G.; Abari, O.; Lu, H.M.; Flanz, J.; Katabi, D. In-Body Backscatter Communication and Localization. In Proceedings of the SIGCOMM ’18: 2018 Conference of the ACM Special Interest Group on Data Communication, New York, NY, USA, 20–25 August 2018; pp. 132–146. [Google Scholar] [CrossRef]
- Linsalata, F.; Tagliaferri, D.; Rinaldi, L.; Bezzetto, L.; Mizmizi, M.; Scazzoli, D.; Badini, D.; Mazzucco, C.; Magarini, M.; Spagnolini, U. Localizing the Vehicle’s Antenna: An Open Problem in 6G Network Sensing. arXiv 2022, arXiv:2204.01097. [Google Scholar]
- Bi, S.; Wang, C.; Wu, B.; Gong, Y.; Ni, W. An Accurate Book-Localization Approach Based on Passive Ultra-High-Frequency RFID. In Lecture Notes in Electrical Engineering, Proceedings of the 6th International Technical Conference on Advances in Computing, Control and Industrial Engineering (CCIE 2021); Shmaliy, Y.S., Abdelnaby Zekry, A., Eds.; Springer: Singapore, 2022; pp. 584–591. [Google Scholar] [CrossRef]
- Bletsas, A.; Dimitriou, A.G.; Sahalos, J.N. Improving Backscatter Radio Tag Efficiency. IEEE Trans. Microw. Theory Tech. 2010, 58, 1502–1509. [Google Scholar] [CrossRef]
- Pinho, P. Recent Wireless Power Transfer Technologies; BoD—Books on Demand: London, UK, 2020. [Google Scholar]
- Nagaraj, S. Spectrum Shaping for Backscatter Modulation. ICT Express 2017, 3, 52–55. [Google Scholar] [CrossRef]
- Basharat, S.; Hassan, S.A.; Mahmood, A.; Ding, Z.; Gidlund, M. Reconfigurable Intelligent Surface-Assisted Backscatter Communication: A New Frontier for Enabling 6G IoT Networks. arXiv 2021, arXiv:2107.07813. [Google Scholar] [CrossRef]
- Abdullah, A.N.; Abdul-Rahaim, L.A. Enhancing the Performance of Localization System for Radio Frequency Transmitters Based on DOA and Triangulation Algorithms. Int. J. Eng. Trends Technol. 2021, 69, 26–35. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, K.; Ma, Y.; Gao, Z.; Zang, Y.; Teng, J. Similarity Analysis-Based Indoor Localization Algorithm with Backscatter Information of Passive UHF RFID Tags. IEEE Sens. J. 2017, 17, 185–193. [Google Scholar] [CrossRef]
- Iannello, F.; Simeone, O.; Spagnolini, U. Energy Management Policies for Passive RFID Sensors with RF-Energy Harvesting. In Proceedings of the 2010 IEEE International Conference on Communications, Cape Town, South Africa, 23–27 May 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Adami, S.E.; Proynov, P.; Hilton, G.S.; Yang, G.; Zhang, C.; Zhu, D.; Li, Y.; Beeby, S.P.; Craddock, I.J.; Stark, B.H. A Flexible 2.45-GHz Power Harvesting Wristband with Net System Output from −24.3 dBm of RF Power. IEEE Trans. Microw. Theory Tech. 2018, 66, 380–395. [Google Scholar] [CrossRef]
- Lee, W.J.; Shah, S.T.; Munir, D.; Lee, T.J.; Chung, M.Y. A Mechanism on Energy Harvesting and Data Communications in Wi-Fi Network. In Proceedings of the IMCOM ’16: 10th International Conference on Ubiquitous Information Management and Communication, New York, NY, USA, 4–6 January 2016. [Google Scholar] [CrossRef]
- Song, Z.; Sastry, C.R. Passive RF Energy Harvesting Scheme for Wireless Sensor. U.S. Patent US8552597B2, 18 September 2013. [Google Scholar]
- Xie, K.; Liu, Y.M.; Zhang, H.L.; Fu, L.Z. Harvest the Ambient AM Broadcast Radio Energy for Wireless Sensors. J. Electromagn. Waves Appl. 2011, 25, 2054–2065. [Google Scholar] [CrossRef]
- Vyas, R.J.; Cook, B.B.; Kawahara, Y.; Tentzeris, M.M. E-WEHP: A Batteryless Embedded Sensor-Platform Wirelessly Powered from Ambient Digital-TV Signals. IEEE Trans. Microw. Theory Tech. 2013, 61, 2491–2505. [Google Scholar] [CrossRef]
- Piñuela, M.; Mitcheson, P.D.; Lucyszyn, S. Ambient RF Energy Harvesting in Urban and Semi-Urban Environments. IEEE Trans. Microw. Theory Tech. 2013, 61, 2715–2726. [Google Scholar] [CrossRef]
- Omeke, K.G.; Mollel, M.; Shah, S.T.; Zhang, L.; Abbasi, Q.H.; Imran, M.A. Towards a Sustainable Internet-of-Underwater-Things based on AUVs, SWIPT and Reinforcement Learning. IEEE Internet Things J. 2023, 1. [Google Scholar] [CrossRef]
- Kim, S.; Vyas, R.; Bito, J.; Niotaki, K.; Collado, A.; Georgiadis, A.; Tentzeris, M.M. Ambient RF Energy-Harvesting Technologies for Self-Sustainable Standalone Wireless Sensor Platforms. Proc. IEEE 2014, 102, 1649–1666. [Google Scholar] [CrossRef]
- Andrenko, A.S.; Lin, X.; Zeng, M. Outdoor RF Spectral Survey: A Roadmap for Ambient RF Energy Harvesting. In Proceedings of the TENCON 2015—2015 IEEE Region 10 Conference, Macao, China, 1–4 November 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Matiko, J.W.; Grabham, N.J.; Beeby, S.P.; Tudor, M.J. Review of the Application of Energy Harvesting in Buildings. Meas. Sci. Technol. 2013, 25, 012002. [Google Scholar] [CrossRef]
- Mimis, K.; Gibbins, D.; Dumanli, S.; Watkins, G.T. Ambient RF Energy Harvesting Trial in Domestic Settings. IET Microwaves Antennas Propag. 2015, 9, 454–462. [Google Scholar] [CrossRef]
- Sherazi, H.H.R.; Zorbas, D.; O’Flynn, B. A Comprehensive Survey on RF Energy Harvesting: Applications and Performance Determinants. Sensors 2022, 22, 2990. [Google Scholar] [CrossRef]
- Guler, U.; Ghovanloo, M. Power Management in Wireless Power-Sipping Devices: A Survey. IEEE Circuits Syst. Mag. 2017, 17, 64–82. [Google Scholar] [CrossRef]
- Song, C.; Huang, Y.; Carter, P.; Zhou, J.; Yuan, S.; Xu, Q.; Kod, M. A Novel Six-Band Dual CP Rectenna Using Improved Impedance Matching Technique for Ambient RF Energy Harvesting. IEEE Trans. Antennas Propag. 2016, 64, 3160–3171. [Google Scholar] [CrossRef]
- Chen, L.; Milligan, B.; Qu, T.; Jeevananthan, L.; Shaker, G.; Safavi-Naeini, S. Cellular Wireless Energy Harvesting for Smart Contact Lens Applications [Education Corner]. IEEE Antennas Propag. Mag. 2018, 60, 108–124. [Google Scholar] [CrossRef]
- Bito, J.; Hester, J.G.; Tentzeris, M.M. Ambient RF Energy Harvesting from a Two-Way Talk Radio for Flexible Wearable Wireless Sensor Devices Utilizing Inkjet Printing Technologies. IEEE Trans. Microw. Theory Tech. 2015, 63, 4533–4543. [Google Scholar] [CrossRef]
- Palazzi, V.; Hester, J.; Bito, J.; Alimenti, F.; Kalialakis, C.; Collado, A.; Mezzanotte, P.; Georgiadis, A.; Roselli, L.; Tentzeris, M.M. A Novel Ultra-Lightweight Multiband Rectenna on Paper for RF Energy Harvesting in the Next Generation LTE Bands. IEEE Trans. Microw. Theory Tech. 2018, 66, 366–379. [Google Scholar] [CrossRef]
- Vu, H.S.; Nguyen, N.; Ha-Van, N.; Seo, C.; Thuy Le, M. Multiband Ambient RF Energy Harvesting for Autonomous IoT Devices. IEEE Microw. Wirel. Components Lett. 2020, 30, 1189–1192. [Google Scholar] [CrossRef]
- Wagih, M.; Nesbitt, R.; Ansari, S.; Abbasi, Q.H.; Ali Imran, M. RFID-Enabled Energy Harvesting using Unidirectional Electrically-Small Rectenna Arrays. In Proceedings of the 2023 17th European Conference on Antennas and Propagation (EuCAP), Florence, Italy, 26–31 March 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Alvarez-Narciandi, G.; Laviada, J.; Pino, M.R.; Las-Heras, F. Phase Acquisition Techniques for RFID Multistatic Setups. Sensors Actuators A Phys. 2018, 270, 97–107. [Google Scholar] [CrossRef]
- Pandey, A.; Jain, A. Comparative Analysis of KNN Algorithm Using Various Normalization Techniques. Int. J. Comput. Netw. Inf. Secur. 2017, 9, 36–42. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nesbitt, R.; Shah, S.T.; Wagih, M.; Imran, M.A.; Abbasi, Q.H.; Ansari, S. Next-Generation IoT: Harnessing AI for Enhanced Localization and Energy Harvesting in Backscatter Communications. Electronics 2023, 12, 5020. https://doi.org/10.3390/electronics12245020
Nesbitt R, Shah ST, Wagih M, Imran MA, Abbasi QH, Ansari S. Next-Generation IoT: Harnessing AI for Enhanced Localization and Energy Harvesting in Backscatter Communications. Electronics. 2023; 12(24):5020. https://doi.org/10.3390/electronics12245020
Chicago/Turabian StyleNesbitt, Rory, Syed Tariq Shah, Mahmoud Wagih, Muhammad A. Imran, Qammer H. Abbasi, and Shuja Ansari. 2023. "Next-Generation IoT: Harnessing AI for Enhanced Localization and Energy Harvesting in Backscatter Communications" Electronics 12, no. 24: 5020. https://doi.org/10.3390/electronics12245020
APA StyleNesbitt, R., Shah, S. T., Wagih, M., Imran, M. A., Abbasi, Q. H., & Ansari, S. (2023). Next-Generation IoT: Harnessing AI for Enhanced Localization and Energy Harvesting in Backscatter Communications. Electronics, 12(24), 5020. https://doi.org/10.3390/electronics12245020