
Using the Displaced Phase Center Azimuth Multiple Beams Technique with Spaceborne Synthetic Aperture Radar Systems for Multichannel Reconstruction of Accelerated Moving Targets


Abstract
:1. Introduction
2. Signal Model
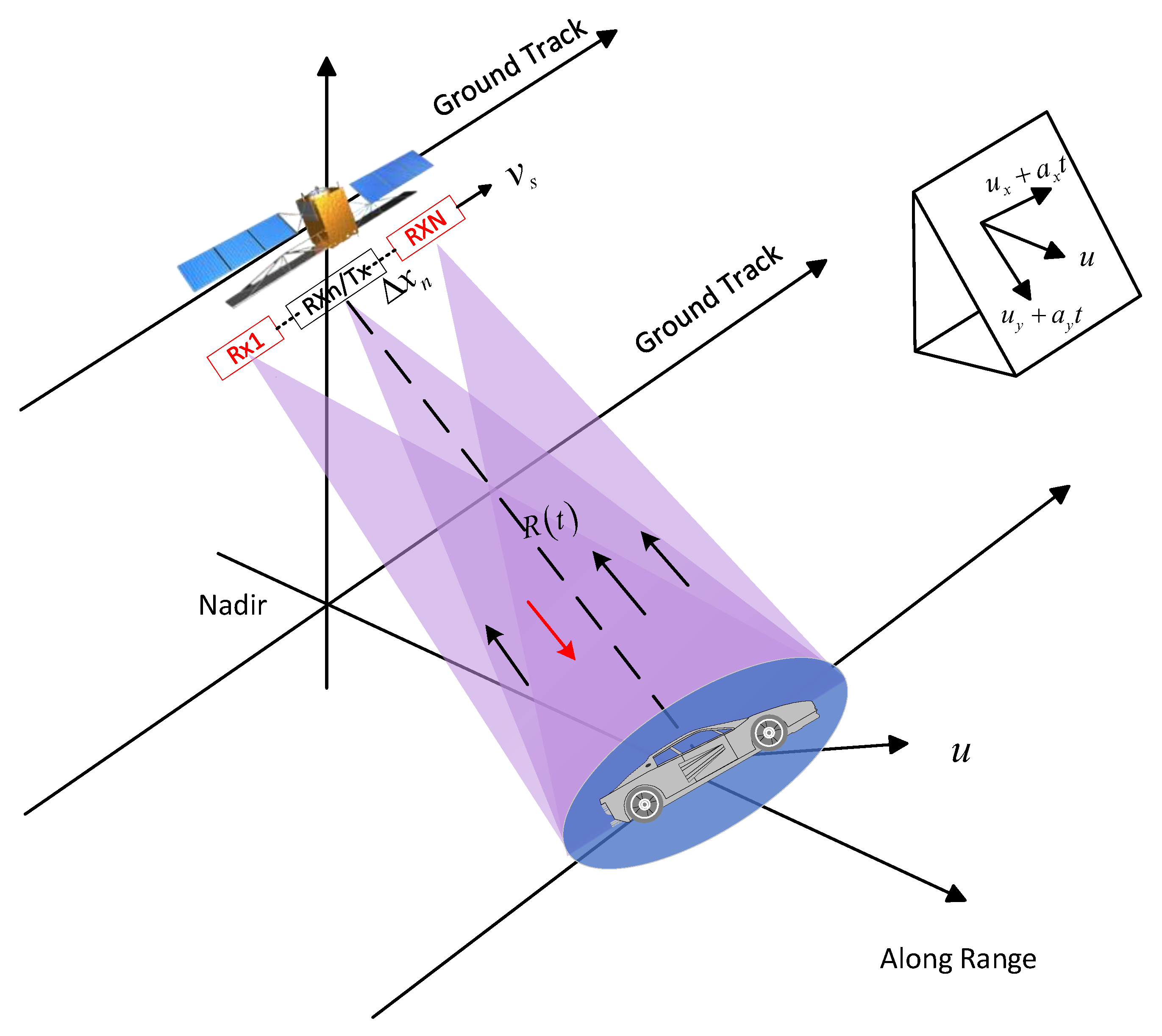
2.1. Geometric Model of Moving Targets
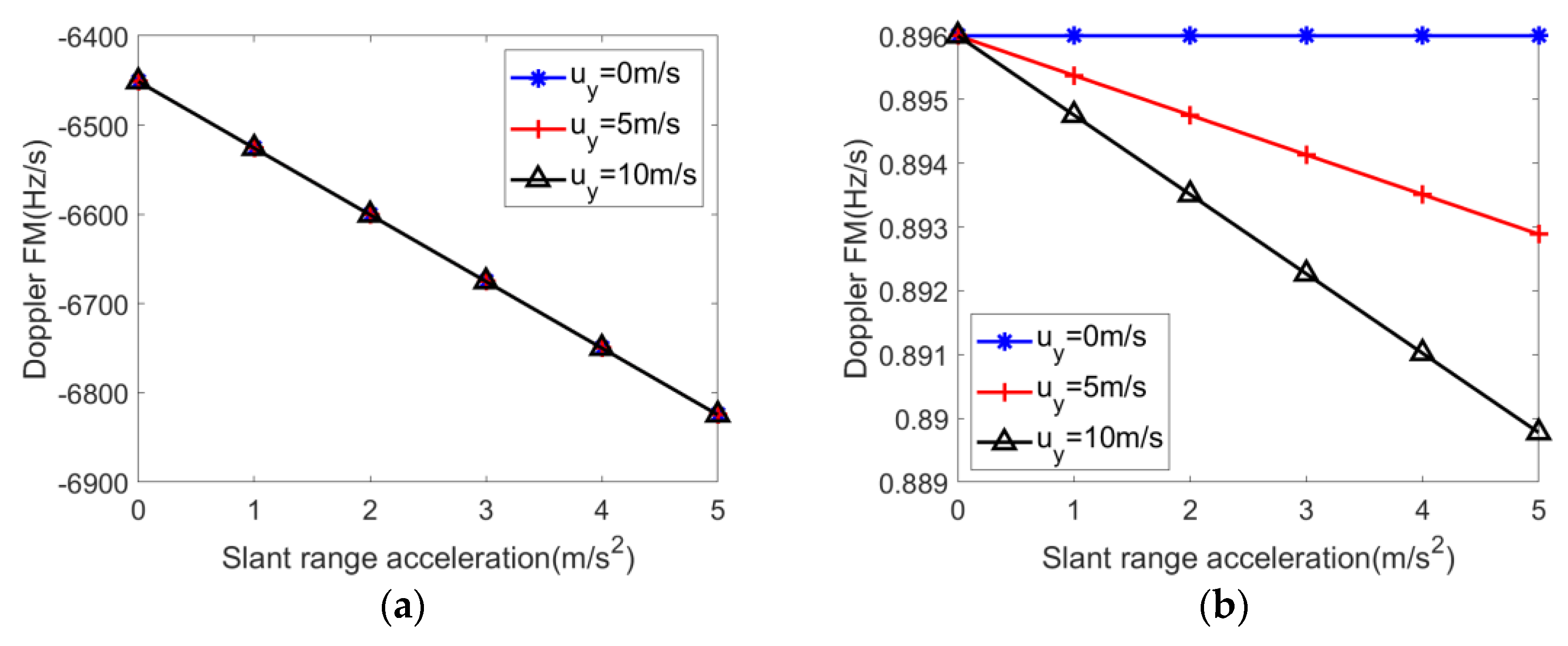
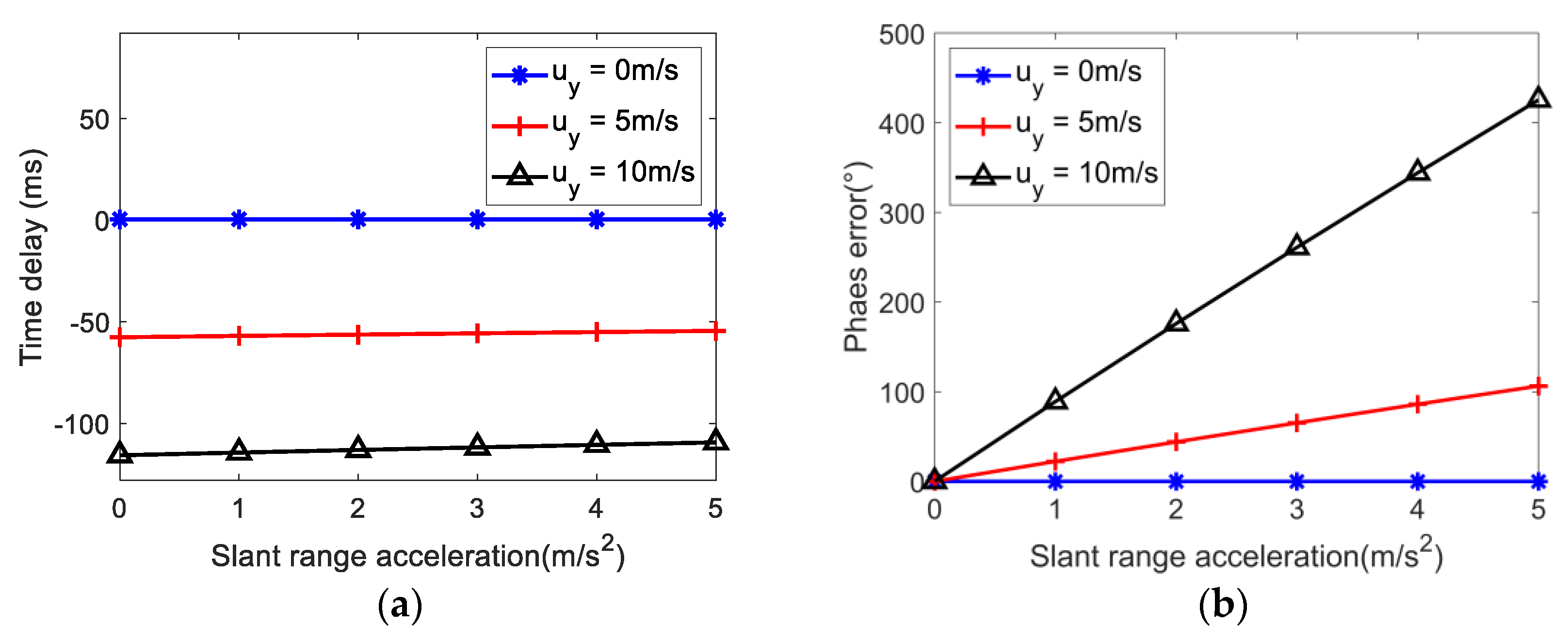
2.2. Acceleration Impact Analysis
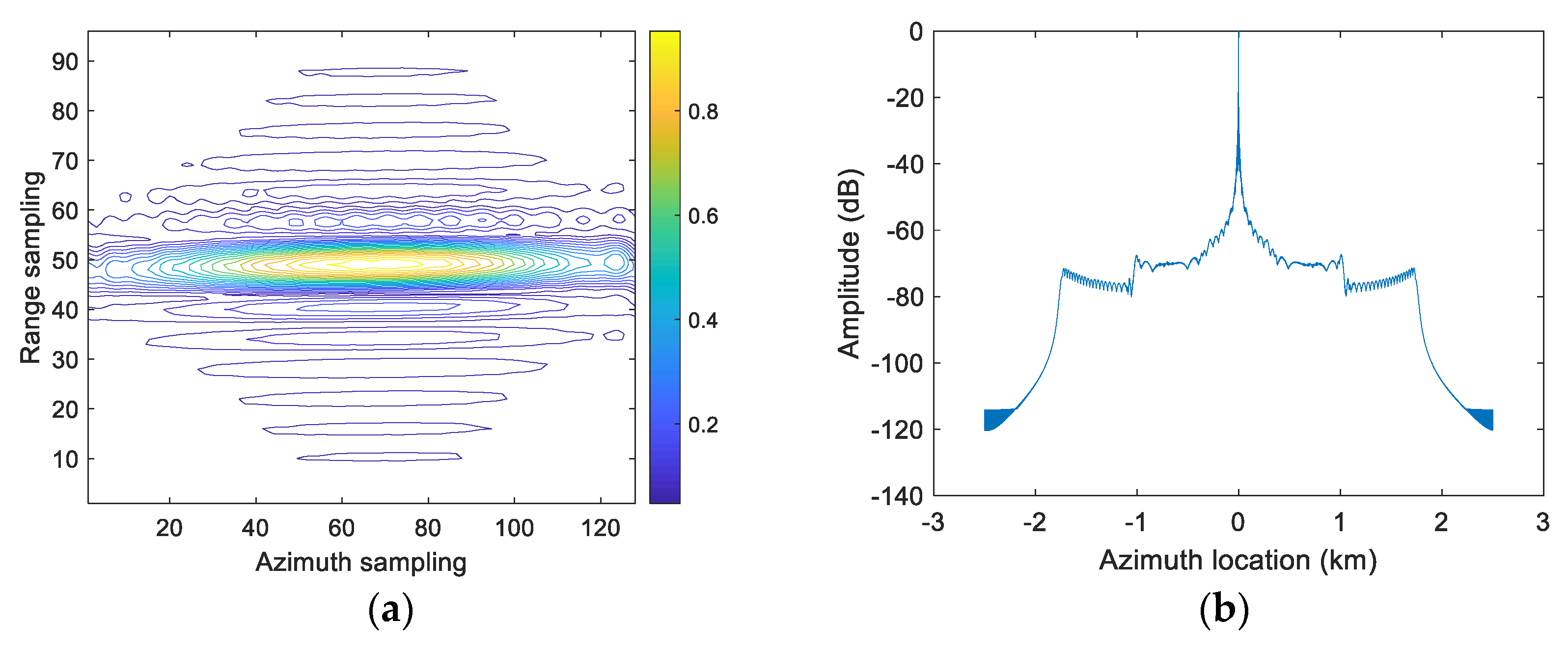
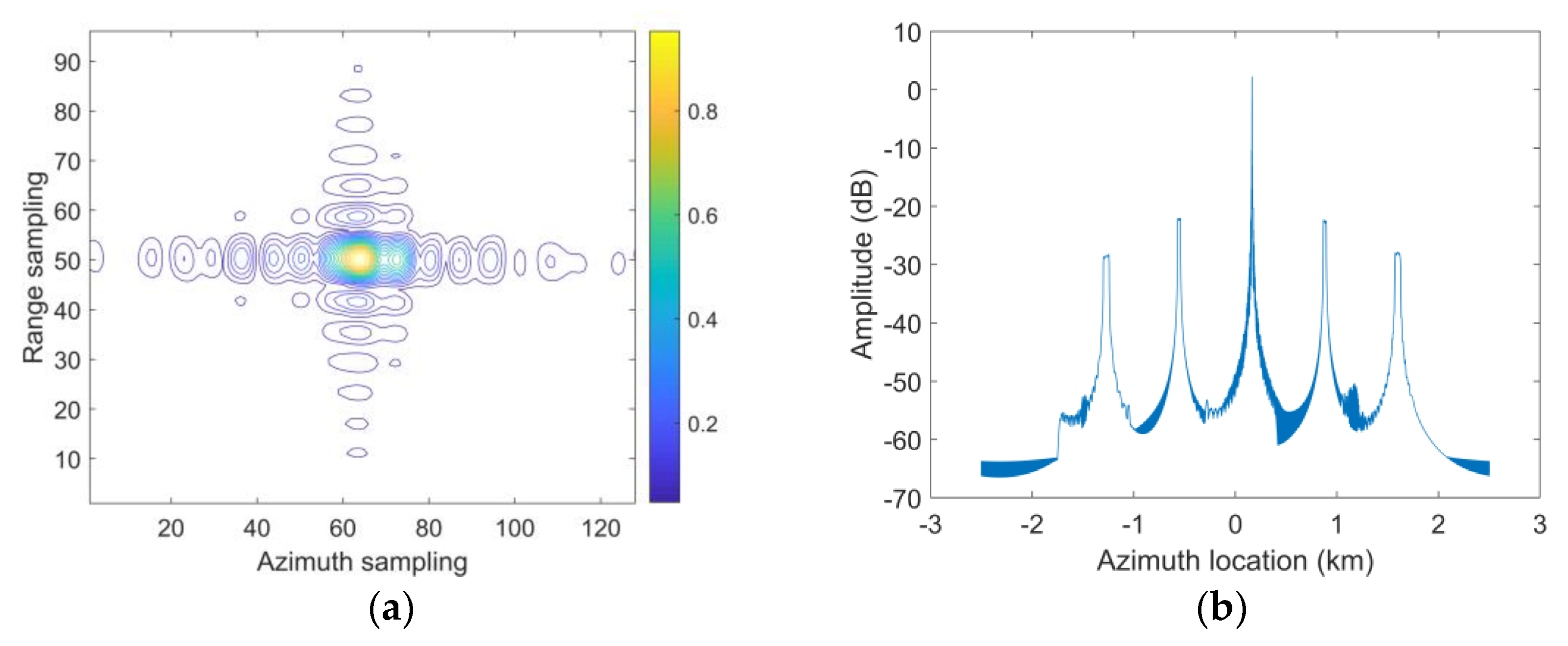
2.3. Effect of Acceleration on Imaging Results
3. Azimuth Multichannel Reconstruction
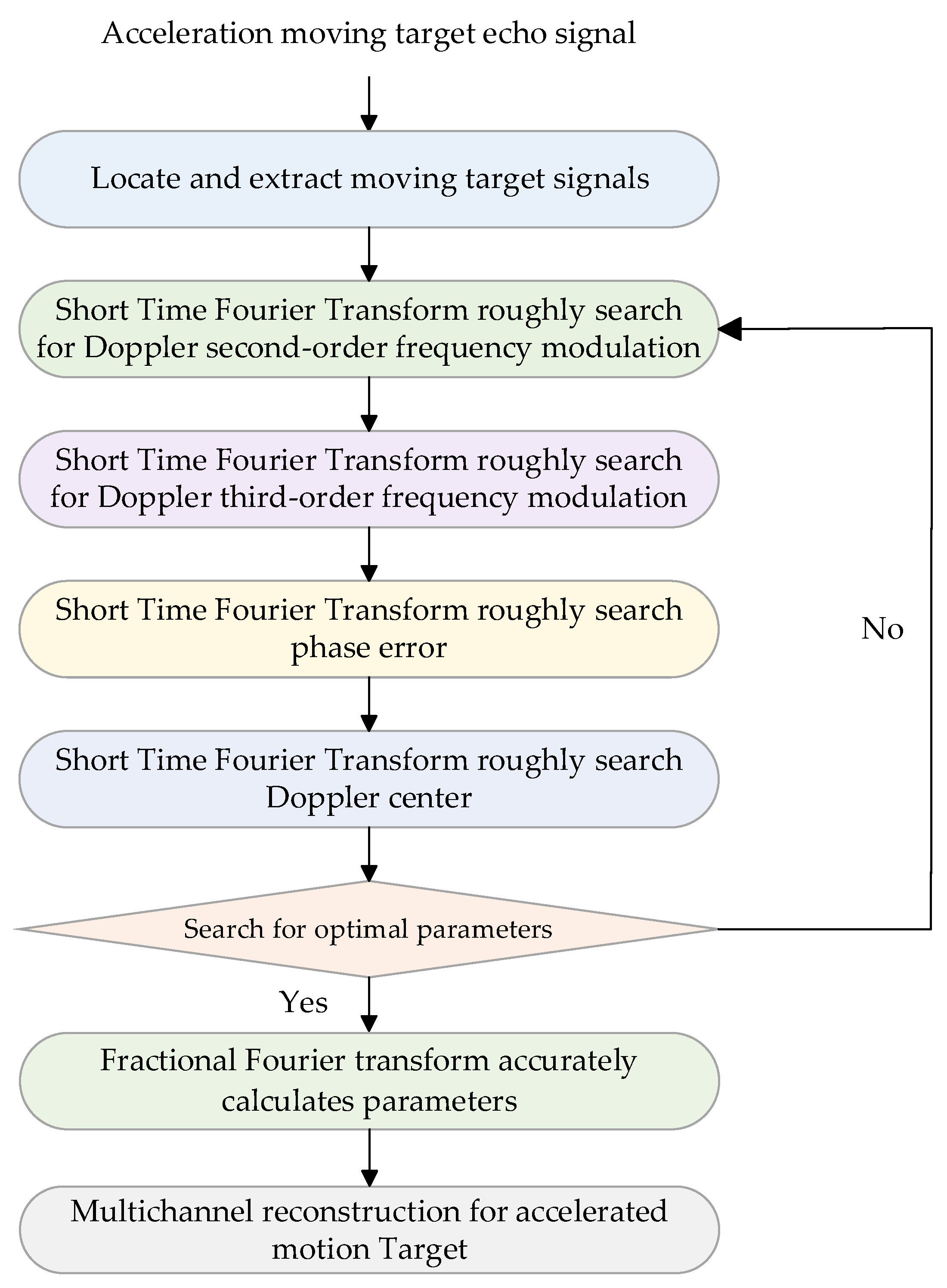
3.1. Moving Target Imaging Method
Parametric Analysis
3.2. Multichannel Reconstruction Processing
3.3. Velocity Estimation
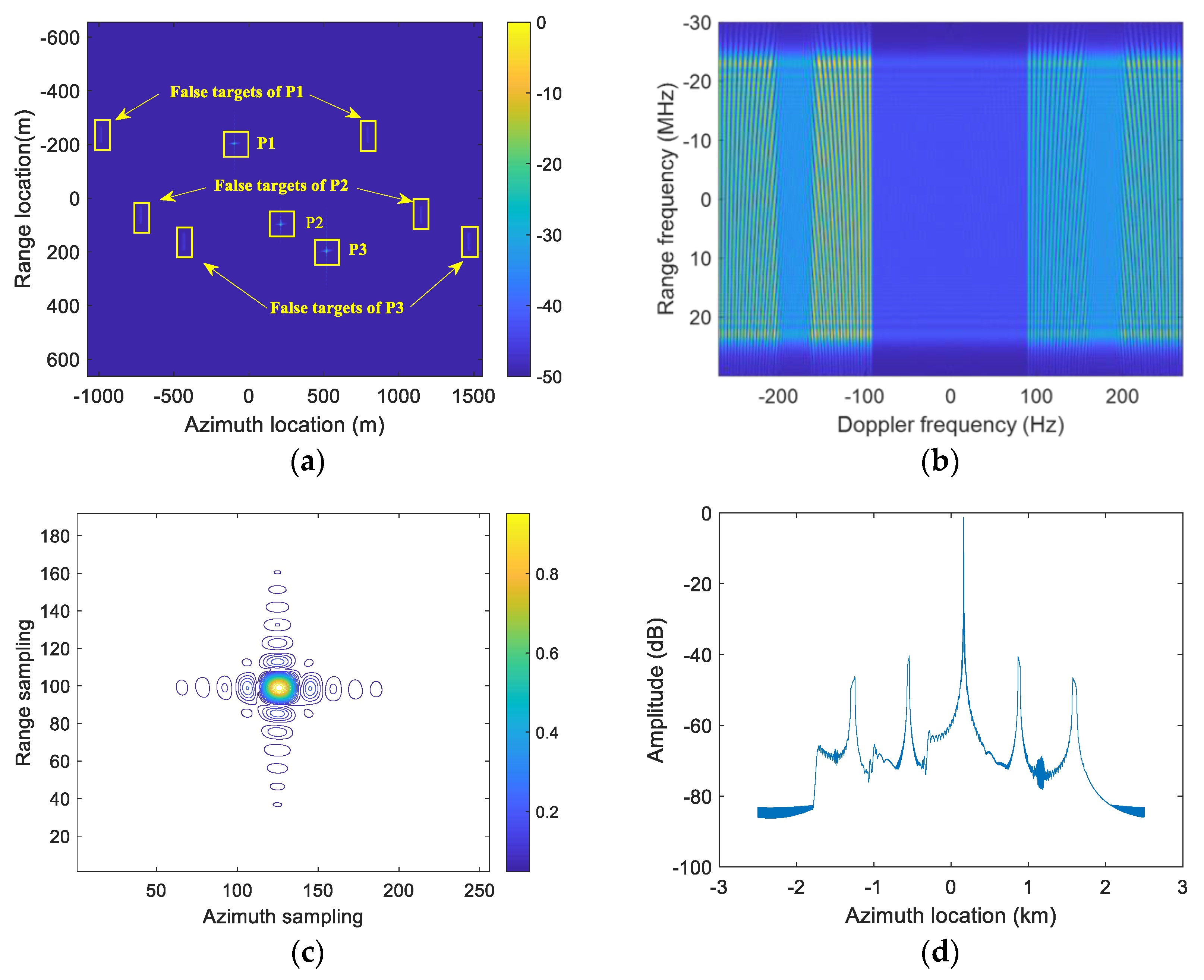
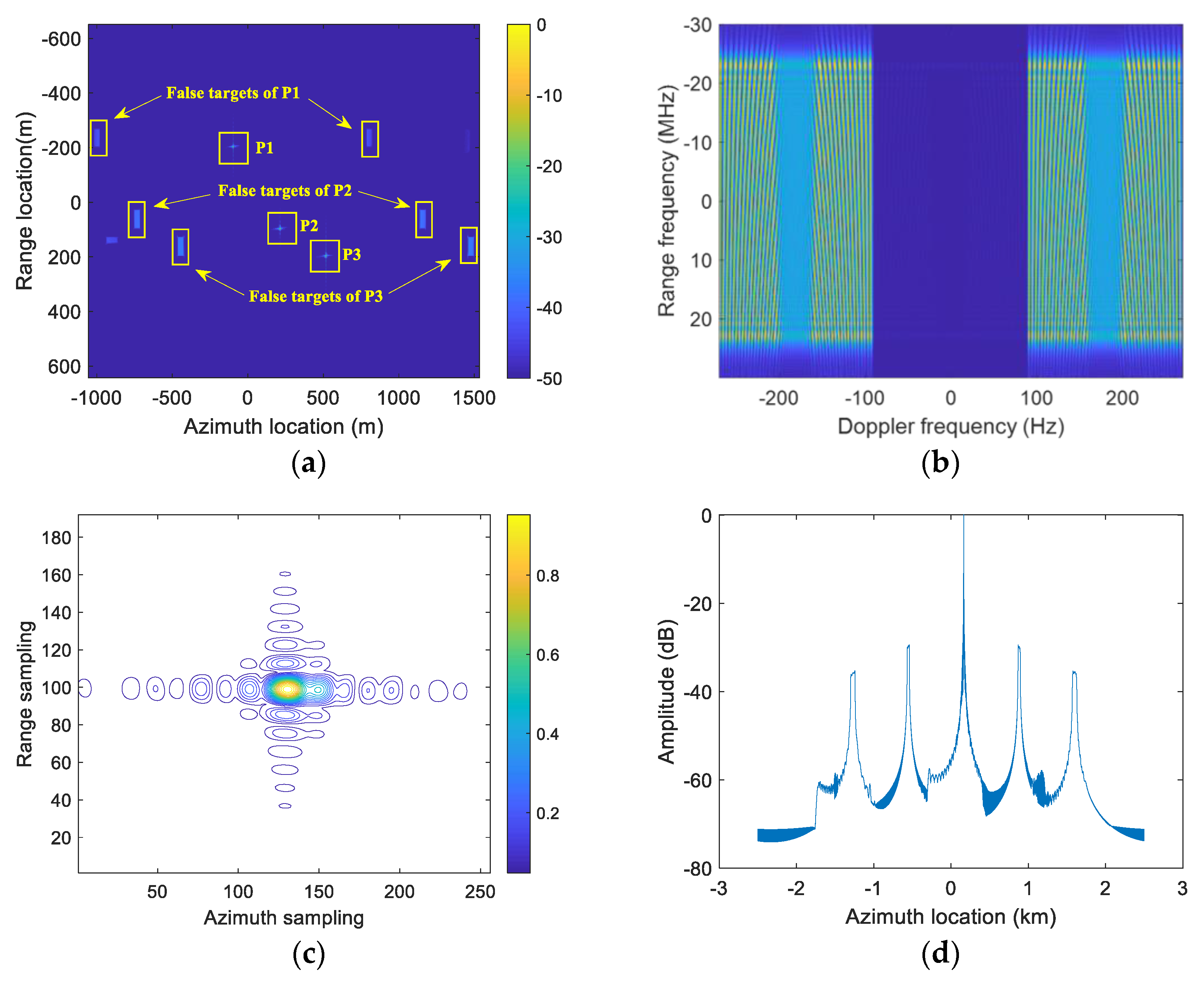
4. Simulation Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Pan, X.; Zhang, H.; Shu, G. Robust Phase Bias Estimation Method for Azimuth Multi-Channel HRWS SAR System Based on Maximum Modified Kurtosis. Electronics 2022, 11, 3821. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, F.; Tian, Y. High-Resolution and Wide-Swath 3D Imaging for Urban Areas Based on Distributed Spaceborne SAR. Remote Sens. 2023, 15, 3938. [Google Scholar] [CrossRef]
- Li, N.; Shen, Q.; Wang, L.; Wang, Q.; Guo, Z.; Zhao, J. Optimal Time Selection for ISAR Imaging of Ship Targets Based on Time-Frequency Analysis of Multiple Scatterers. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Wang, R.; Loffeld, O.; Neo, Y.; Nies, H.; Walterscheid, I.; Espeter, T.; Klare, J.; Ender, J. Focusing Bistatic SAR Data in Air borne/Stationary Configuration. IEEE Trans. Geosci. Remote Sens. 2010, 48, 452–465. [Google Scholar] [CrossRef]
- Wang, X.; Wang, R.; Li, N.; Fan, H.; Wang, Y. A method of estimating the velocity of moving targets for use in high-resolution wide-swath SAR imaging. Remote Sens. Lett. 2018, 9, 305–313. [Google Scholar] [CrossRef]
- Cerutti-Maori, D.; Sikaneta, I.; Klare, J. MIMO SAR Processing for Multichannel High-Resolution Wide-Swath Radars. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5034–5055. [Google Scholar] [CrossRef]
- Zou, Q.; Xin, Q.; Cheng, P. Non-uniformly sampled signal reconstruction of DPC-MAB FMCW SAR based on fractional fourier transform. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015. [Google Scholar]
- Gebert, N. Multi-Channel Azimuth Processing for High-Resolution Wide-Swath SAR Imaging. Ph. D. Thesis, DLR-Forschungsbericht, University of Karlsruhe (TH), Wessling, Germany, June 2009. [Google Scholar]
- Xu, W.; Huang, P.; Wang, R.; Deng, Y. Processing of multichannel sliding spotlight and TOPS synthetic aperture radar data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4417–4429. [Google Scholar] [CrossRef]
- Chen, Q.; Deng, Y.K.; Liu, Y.D.; Shang, X.Q. SAR azimuth signal reconstruction based on adaptive filtering for the DPC-MAB SAR system. J. Electron. Inf. Technol. 2012, 34, 1331–1336. [Google Scholar] [CrossRef]
- Luo, X.; Wang, R.; Xu, W. Modification of multichannel reconstruction algorithm on the SAR with linear variation of PRI. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3050–3059. [Google Scholar] [CrossRef]
- Papoulis, A. Generalized sampling expansion. IEEE Trans. Circuits Syst. 1977, 24, 652–654. [Google Scholar] [CrossRef]
- Krieger, G.; Gebert, N.; Moreira, A. Unambiguous SAR signal reconstruction from nonuniform displaced phase center sampling. IEEE Geosci. Remote Sens. Lett. 2004, 1, 260–264. [Google Scholar] [CrossRef]
- Guo, Z.; Yuan, X.; Zhang, P. An algorithm of multichannel SAR high-resolution and wide-swath imaging. J. Electron. Inf. Technol. 2008, 30, 310–313. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Krieger, G. Simultaneous high-resolution wide-swath SAR imaging and ground moving target indication: Processing approaches and system concepts. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5015–5029. [Google Scholar] [CrossRef]
- Long, Y.; Zhao, F.; Zheng, M. An unambiguous imaging method of moving target for maritime scenes with spaceborne high-resolution and wide-swath SAR. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–19. [Google Scholar] [CrossRef]
- Jao, J.K.; Yegulalp, A. Multichannel synthetic aperture radar signatures and imaging of a moving target. Inverse Probl. 2013, 29, 054009. [Google Scholar] [CrossRef]
- Li, B.; Sun, G.C.; Xing, M. Moving target radial velocity estimation method for HRWS SAR system based on subspace projection. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, R.; Wang, Z.; Zhou, Y. A Radial Velocity Estimation Method of Moving Target for Azimuth Multichannel HRWS SAR. In Proceedings of the IGARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022. [Google Scholar]
- Hui, Z.; Fengjun, Z.; Jian, Y. SAR accelerating moving target parameter estimation and imaging based on three-order polynomial Fourier transform. J. Electron. Inf. Technol. 2016, 38, 919–926. [Google Scholar]
- Baumgartner, S.; Gabele, M.; Krieger, G.; Bethke, K.H.; Zuev, S. Traffic monitoring with SAR: Implications of target acceleration. In Proceedings of the EUSAR 2006; European Conference on Synthetic Aperture Radar, Dresden, Germany, 16–18 May 2006. [Google Scholar]
- Wei-Kong, Q.I.; Wei-Dong, Y.U.; Ping-Ping, H. Moving target acceleration indicaion and estimation for space-borne bistatic synthetic aperture radar. Syst. Eng. Electron. 2010, 32, 946–950. [Google Scholar]
- Yang, J.; Qiu, X.; Shang, M. A method of marine moving targets detection in multi-channel ScanSAR system. Remote Sens. 2020, 12, 3792. [Google Scholar] [CrossRef]
- Sharma, J. The influence of target acceleration on dual-channel SAR-GMTI (synthetic aperture radar ground moving target indication) data. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2005. [Google Scholar]
- Pan, X.; Wang, W.; Wu, L. Improved Moving Target Imaging Method for a Multichannel HRWS SAR System. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Kim, S.W.; Won, J.S. Acceleration compensation for estimation of along-track velocity of ground moving target from single-channel SAR SLC data. Remote Sens. 2020, 12, 1609. [Google Scholar] [CrossRef]
- Gebert, N.; Krieger, G.; Moreira, A. Multichannel azimuth processing in ScanSAR and TOPS mode operation. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2994–3008. [Google Scholar] [CrossRef]
- Barbarossa, S.; Farina, A. Detection and imaging of moving objects with synthetic aperture radar. Part 2: Joint time-frequency analysis by Wigner-Ville distribution. IEE Proc. F—Radar Signal Process. 1992, 139, 79–88. [Google Scholar] [CrossRef]
- Fienup, J.R. Detecting moving targets in SAR imagery by focusing. IEEE Trans. Aerosp. Electron. Syst. 2001, 37, 794–809. [Google Scholar] [CrossRef]
- Wang, H.; Jiang, Y. Real-time parameter estimation for SAR moving target based on WVD slice and FrFT. Electron. Lett. 2018, 54, 47–49. [Google Scholar] [CrossRef]
- Bai, J.L.; Wu, R.G.; Wang, J.L.; Hong, Y.B. Parameter Estimation of Spaceborne SAR Based on the Combination of STFT and FRFT. Appl. Mech. Mater. 2010, 20, 954–957. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Satellite velocity | 7200 m/s |
| Carrier frequency | 5.6 GHz |
| Number of sub-apertures | 3 |
| Transmitting antenna length | 4 m |
| Receiving antenna length | 3 m × 3 |
| Scene center slant distance | 600 km |
| Operated system PRF | 1800 Hz |
| Transmitted pulse width | 4 μs |
| Pulse bandwidth | 100 MHz |
| Sampling frequency | 120 MHz |
| Method | Target | Res. (m) | Range PSLR (dB) | ISLR (dB) | MFTA (dB) |
|---|---|---|---|---|---|
| Conventional | P1 | 2.66 | −13.25 | −9.96 | −28.41 |
| P2 | 2.67 | −13.34 | −10.06 | −25.04 | |
| P3 | 2.70 | −13.46 | −10.13 | −29.81 | |
| Proposed | P1 | 2.67 | −13.29 | −10.07 | −56.68 |
| P2 | 2.68 | −13.32 | −10.14 | −59.39 | |
| P3 | 2.69 | −13.48 | −10.15 | −60.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, W.; Chen, Y.; Huang, P.; Tan, W.; Qi, Y. Using the Displaced Phase Center Azimuth Multiple Beams Technique with Spaceborne Synthetic Aperture Radar Systems for Multichannel Reconstruction of Accelerated Moving Targets. Electronics 2023, 12, 4954. https://doi.org/10.3390/electronics12244954
Xu W, Chen Y, Huang P, Tan W, Qi Y. Using the Displaced Phase Center Azimuth Multiple Beams Technique with Spaceborne Synthetic Aperture Radar Systems for Multichannel Reconstruction of Accelerated Moving Targets. Electronics. 2023; 12(24):4954. https://doi.org/10.3390/electronics12244954
Chicago/Turabian StyleXu, Wei, Yu Chen, Pingping Huang, Weixian Tan, and Yaolong Qi. 2023. "Using the Displaced Phase Center Azimuth Multiple Beams Technique with Spaceborne Synthetic Aperture Radar Systems for Multichannel Reconstruction of Accelerated Moving Targets" Electronics 12, no. 24: 4954. https://doi.org/10.3390/electronics12244954
APA StyleXu, W., Chen, Y., Huang, P., Tan, W., & Qi, Y. (2023). Using the Displaced Phase Center Azimuth Multiple Beams Technique with Spaceborne Synthetic Aperture Radar Systems for Multichannel Reconstruction of Accelerated Moving Targets. Electronics, 12(24), 4954. https://doi.org/10.3390/electronics12244954