
A Fault Location Method for Medium Voltage Distribution Network Based on Ground Fault Transfer Device

 ,
, 
Abstract
:1. Introduction
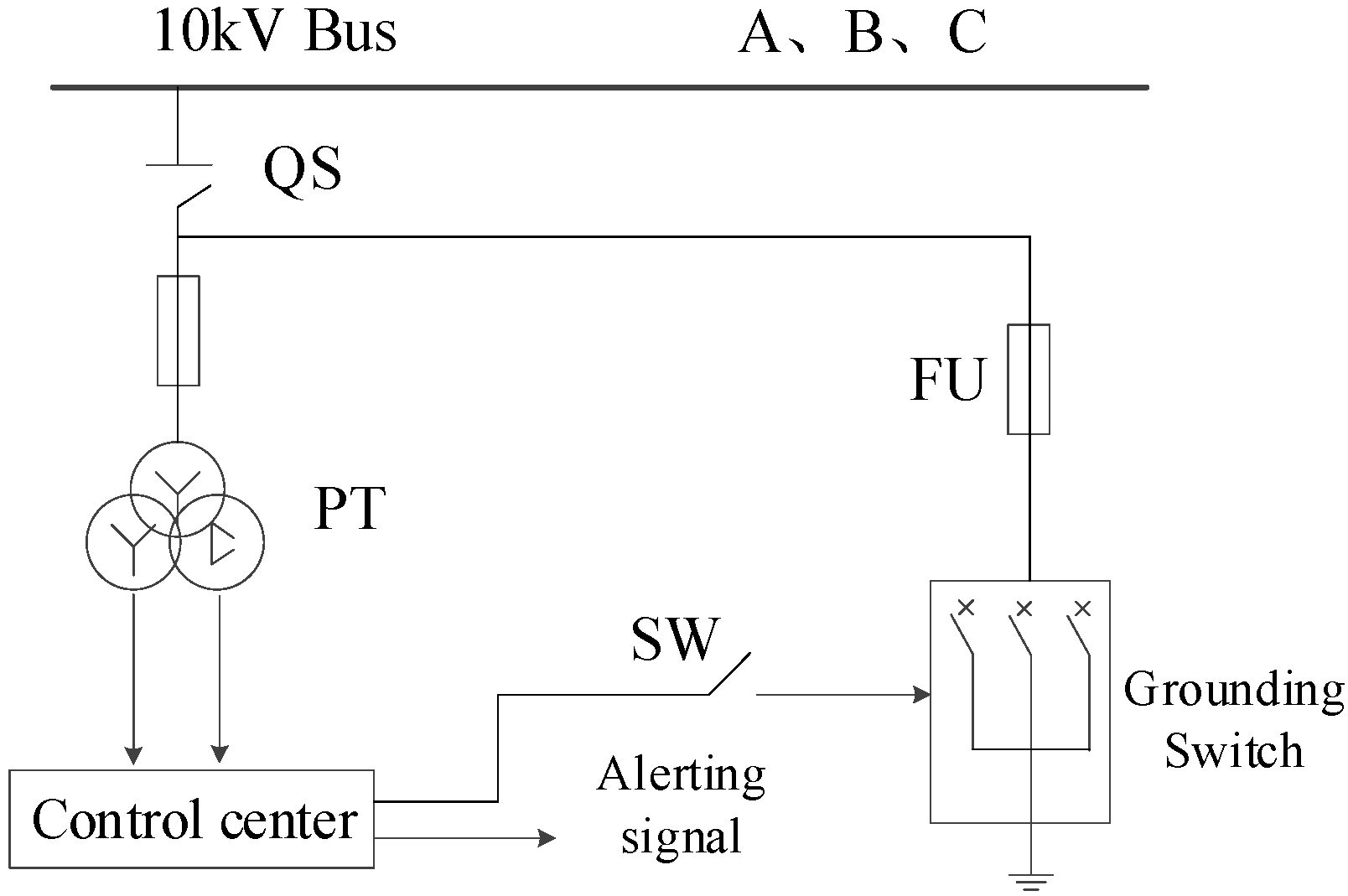
2. The Working Principle of the GFT Device
3. Accurate Fault Location Method Based on TWATD
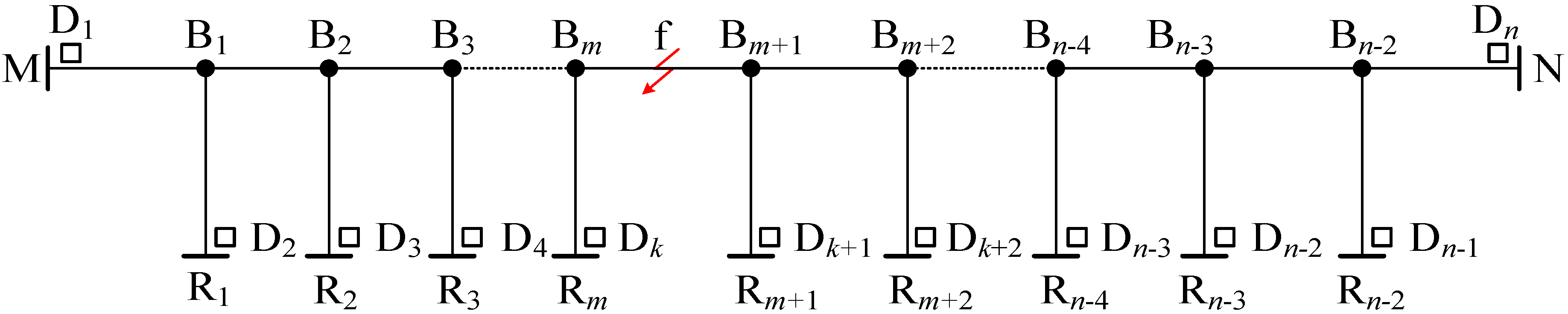
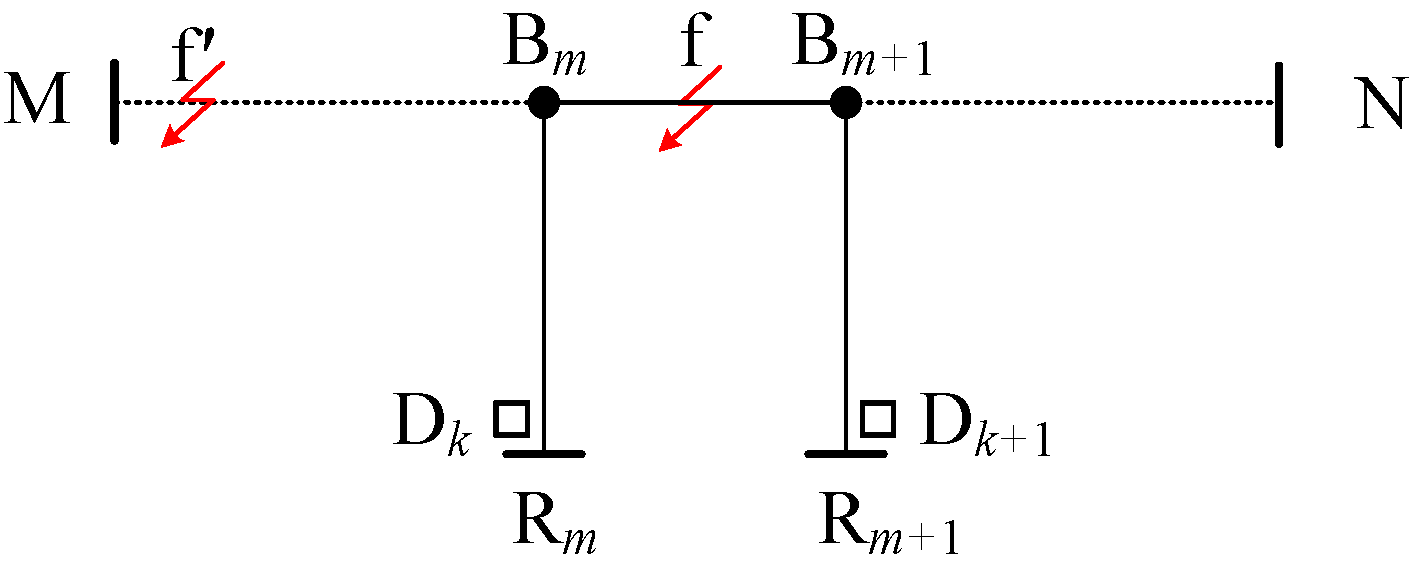
3.1. Faulty Section Identification Method
3.2. The Accurate Fault Location Method
4. Simulation Analysis
4.1. Technical Performance Verification of Location Method
4.2. Location Results under Different Fault Positions
4.3. Location Results under Different Fault Conditions
4.4. Performance Analysis of the Proposed Method in Overhead Wire–Cable Hybrid Line Scenario
5. Conclusions
- (1)
- Taking the idea of faulty section identification and fault point location, the two TW transmission processes of fault grounding and active grounding at the bus are analyzed. It is found that the two TW transmission directions of the upstream MPs of the fault point are opposite, and the time difference of the wave head between the adjacent MPs is different. The two TW transmission directions of the downstream MPs of the fault point are the same, and the time difference of the wave head between the adjacent MPs is the same. Thus, the faulty section can be identified.
- (2)
- According to the arrival time and distance of the TW in the upstream section, the location equation is constructed, and an accurate fault location method based on the arrival time difference of the TW head is proposed. Simulation results show that the method has high location accuracy, the absolute error is less than 30 m, and it is not affected by the TW velocity, the fault conditions, or the distributed power sources.
- (3)
- The proposed method is still valid for the overhead line and cable hybrid line with a low cable proportion. For the case of a high cable proportion, it can be considered to appropriately increase the value of time threshold tset or take other measures to deal with the problem of the unequal wave velocity of overhead lines and cables. This will be our next research direction.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Qiao, J.; Yin, X.; Wang, Y.; Xu, W.; Tan, L. An accurate fault location method for distribution network based on an active transfer arc-suppression device. Energy Rep. 2021, 7, 552–560. [Google Scholar] [CrossRef]
- Pu, Z.; Liu, H.; Wang, Y.; Yu, X.; Wu, T. Simulation and Protection of Reignition Overvoltage in Wind Farm Considering Microscopic Dielectric Recovery Process of Vacuum Circuit Breaker. Energies 2023, 16, 2070. [Google Scholar] [CrossRef]
- Yan, F.; Liao, Z.; Liu, W.; Zhou, J.; Yang, B.; Guo, C. The test and analysis of automatic tracking arc suppression compensation device and fault transfer grounding device on-site fault treatment. Distrib. Util. 2017, 34, 89–92. [Google Scholar]
- Wu, D.; Wang, J.-f. Lightning Protection of the Explosion Airflow Arc-Quenching Gap for 110 kV Transmission Lines. Energies 2021, 14, 5126. [Google Scholar] [CrossRef]
- Toader, D.; Vintan, M.; Solea, C.; Vesa, D.; Greconici, M. Analysis of the Possibilities of Selective Detection of a Single Line-to-Ground Fault in a Medium Voltage Network with Isolated Neutral. Energies 2021, 14, 7019. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, K.; Xiao, X.; Yang, L.; Fan, S.; Chen, S. Effects of load on arc-suppression technology based on grounded-fault transfer device. Electr. Meas. Instrum. 2019, 56, 24–30. [Google Scholar]
- Liu, J.; Tian, X.; Li, Y.; Zhang, Z.; Quan, L. Application Analysis of Active Transfer Type Arc-extinguishing Device under Long Feeder Line and Heavy Load. Power Syst. Technol. 2019, 43, 1105–1110. [Google Scholar]
- Pourahmadi-Nakhli, M.; Safavi, A.A. Path Characteristic Frequency-Based Fault Locating in Radial Distribution Systems Using Wavelets and Neural Networks. IEEE Trans. Power Deliv. 2010, 26, 772–781. [Google Scholar] [CrossRef]
- Dey, B.; Dutta, S.; Garcia Marquez, F.P. Intelligent Demand Side Management for Exhaustive Techno-Economic Analysis of Microgrid System. Sustainability 2023, 15, 1795. [Google Scholar] [CrossRef]
- Apostolopoulos, C.A.; Arsoniadis, C.G.; Georgilakis, P.S. Unsynchronized measurements-based fault location algorithm for active distribution systems without requiring source impedances. IEEE Trans. Power Deliv. 2022, 37, 2071–2082. [Google Scholar] [CrossRef]
- Yanqing, C.; Tao, L.; WEnjian, H.; Yao, Z.; Qing, X.; Haoyuan, X.; Rui, L. Single-phase-to-earth fault location in distribution networks considering the distributed relations of the zero-sequence currents. Power Syst. Prot. Control 2020, 48, 118–126. [Google Scholar]
- Rohit, B.; Saurav, R.; Biplab, B. Weak bus-constrained PMU placement for complete observability of a connected power network considering voltage stability indices. Prot. Control Mod. Power Syst. 2020, 5, 28. [Google Scholar]
- Kuppusamy, R.; Nikolovski, S.; Teekaraman, Y. Review of Machine Learning Techniques for Power Quality Performance Evaluation in Grid-Connected Systems. Sustainability 2023, 15, 15055. [Google Scholar] [CrossRef]
- Deng, F.; Zeng, X.; Pan, L. Research on multi-terminal travelling wave fault location method in complicated networks based on cloud computing. Prot. Control Mod. Power Syst. 2017, 2, 2–19. [Google Scholar] [CrossRef]
- Wang, D.; Hou, M.Q. Travelling wave fault location algorithm for LCC-MMC-MTDC hybrid transmission system based on HilbertHuang transform. Int. J. Electr. Power Energy Syst. 2020, 121, 016125. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Q.; Wang, M.; Wang, X.; Qi, E. Fault Location Method of Multi-Terminal Transmission Line Based on Fault Branch Judgment Matrix. Appl. Sci. 2023, 13, 1174. [Google Scholar] [CrossRef]
- Schweitzer, E.O.; Guzmán, A.; Mynam, M.V.; Skendzic, V.; Marx, S. A new travelling wave fault locating algorithm for line current differential relays. In Proceedings of the 12th IET International Conference on Developments in Power System Protection (DPSP 2014), Copenhagen, Denmark, 31 March–3 April 2014. [Google Scholar]
- Xi, Y.; Li, Z.; Zeng, X.; Tang, X.; Zhang, X.; Xiao, H. Fault location based on travelling wave identification using an adaptive extended Kalman filter. IET Gener. Transm. Distrib. 2018, 12, 1314–1322. [Google Scholar] [CrossRef]
- Wang, L.; Liu, H.; Dai, L.V.; Liu, Y. Novel Method for Identifying Fault Location of Mixed Lines. Energies 2018, 11, 1529. [Google Scholar] [CrossRef]
- Yu, W.; Zu, J.; Chen, Z. A new method of grounding fault voltage suppression in distribution network. J. Electr. Power Sci. Technol. 2012, 27, 64–69. [Google Scholar]
- Wang, Z.; He, J.; Yin, X.; Lu, J.; Hui, D.; Zhang, H. 10kV High Speed Vacuum Switch With Electromagnetic Repulsion Mechanism. Trans. China Electrotech. Soc. 2009, 24, 68–75. [Google Scholar]
- Qiao, J.; Yin, X.; Wang, Y. A multi-terminal traveling wave fault location method for active distribution network based on residual clustering. Int. J. Electr. Power Energy Syst. 2021, 131, 107070. [Google Scholar] [CrossRef]
- Khan, M.A.; Asad, B.; Vaimann, T.; Kallaste, A.; Pomarnacki, R.; Hyunh, V.K. Improved Fault Classification and Localization in Power Transmission Networks Using VAE-Generated Synthetic Data and Machine Learning Algorithms. Machines 2023, 11, 963. [Google Scholar] [CrossRef]
- Deng, F.; Zu, Y.R.; Mao, Y.; Zeng, X.J.; Li, Z.W. A method for distribution network line selection and fault location based on a hierarchical fault monitoring and control system. Int. J. Electr. Power Energy Syst. 2020, 123, 106061. [Google Scholar] [CrossRef]
- Liu, N.H.; Gao, J.H.; Zhang, B.; Wang, Q. Self-adaptive generalized STransform and its application in seismic time-frequency analysis. IEEE Trans. Geosci. Remote 2019, 57, 7849–7859. [Google Scholar] [CrossRef]
- Deng, F.; Li, P.; Zeng, X.J.; Yu, L. Fault Line Selection and Location Method Based on Synchrophasor Measurement Unit for Distribution Network. Autom. Electr. Power Syst. 2020, 44, 160–171. [Google Scholar]
- Yu, L.; Jiao, Z.B.; Wang, X.P.; Chen, W. Accurate Fault Location Scheme and Key Technology of Medium-voltage Distribution Network with Synchrophasor Measurement Units. Autom. Electr. Power Syst. 2020, 44, 30–38. [Google Scholar]
- Chen, R.; Yin, X.X.; Li, Y.Y.; Lin, J.Y. Computational fault time difference-based fault location method for branched power distribution networks. IEEE Access 2019, 7, 181972–181982. [Google Scholar] [CrossRef]
- Zhao, J.; Yang, S.; Lu, H.; Cheng, M.; Han, X. The Study on Fault Location for Hybrid Line without the Affection of Wave Speed on the Cable. Electr. Meas. Instrum. 2013, 50, 11–15 + 20. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MP | Arrival Time | MP | Arrival Time | MP | Arrival Time |
|---|---|---|---|---|---|
| M1 | 0.1035082 | M6 | 0.1035088 | M11 | 0.1035076 |
| M2 | 0.1035084 | M7 | 0.1035075 | M12 | 0.1035031 |
| M3 | 0.1035101 | M8 | 0.1035063 | M13 | 0.1035092 |
| M4 | 0.1035112 | M9 | 0.1035048 | M14 | 0.1035105 |
| M5 | 0.1035129 | M10 | 0.1035068 | M15 | 0.1035099 |
| MP | Arrival Time | MP | Arrival Time | MP | Arrival Time |
|---|---|---|---|---|---|
| M1 | 0.1060000 | M6 | 0.1060156 | M11 | 0.1060076 |
| M2 | 0.1060078 | M7 | 0.1060143 | M12 | 0.1060031 |
| M3 | 0.1060095 | M8 | 0.1060131 | M13 | 0.1060087 |
| M4 | 0.1060106 | M9 | 0.1060116 | M14 | 0.1060100 |
| M5 | 0.1060123 | M10 | 0.1060068 | M15 | 0.1060094 |
| Δt1–2 | Δt2–3 | Δt3–4 | Δt4–5 | Δt5–6 | Δt6–7 | Δt7–8 |
| Δt8–9 | Δt9–12 | Δt9–13 | Δt10–11 | Δt11–12 | Δt13–14 | Δt14–15 |
| Fault Position | Faulty Branch | Actual Distance (m) | Section Location Result | Location Result (m) | Absolute Error (m) | Relative Error (%) |
|---|---|---|---|---|---|---|
| f2 | B3B4 | 935 m | M3M4 | 942 m | 7 | 0.036 |
| f3 | B5B6 | 967 m | M7M8 | 964 m | 3 | 0.015 |
| f4 | B8E10 | 343 m | M10M11 | 352 m | 9 | 0.046 |
| Fault Position | Faulty Branch | Actual Distance (m) | Fault Initial Phase (°) | Fault Resistance (Ω) | Section Location Result | Location Result (m) | Absolute Error (m) | Relative Error (%) |
|---|---|---|---|---|---|---|---|---|
| f1 | B9B10 | 1401 | 30 | 5 | M9M12 | 1418 | 17 | 0.087 |
| 10 | M9M12 | 1418 | 17 | 0.087 | ||||
| 15 | M9M12 | 1418 | 17 | 0.087 | ||||
| 60 | 5 | M9M12 | 1407 | 6 | 0.031 | |||
| 10 | M9M12 | 1407 | 6 | 0.031 | ||||
| 15 | M9M12 | 1407 | 6 | 0.031 | ||||
| 90 | 5 | M9M12 | 1413 | 12 | 0.062 | |||
| 10 | M9M12 | 1413 | 12 | 0.062 | ||||
| 15 | M9M12 | 1413 | 12 | 0.062 | ||||
| f2 | B3B4 | 935 | 30 | 500 | M3M4 | 956 | 21 | 0.108 |
| 1000 | M3M4 | 956 | 21 | 0.108 | ||||
| 1500 | M3M4 | 956 | 21 | 0.108 | ||||
| 60 | 500 | M3M4 | 942 | 7 | 0.036 | |||
| 1000 | M3M4 | 942 | 7 | 0.036 | ||||
| 1500 | M3M4 | 942 | 7 | 0.036 | ||||
| 90 | 500 | M3M4 | 917 | 18 | 0.092 | |||
| 1000 | M3M4 | 917 | 18 | 0.092 | ||||
| 1500 | M3M4 | 917 | 18 | 0.092 |
| Fault Position | Translation Error | Faulty Branch | Actual Distance (m) | Section Location Result | Location Result (m) | Absolute Error (m) | Relative Error (%) |
|---|---|---|---|---|---|---|---|
| f1 | No error | B9B10 | 1401 | M9~M12 | 1416 | 15 | 0.0775 |
| +2% | 1379 | 22 | 0.1137 | ||||
| −5% | 1441 | 40 | 0.2067 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, G.; Ma, W.; Wei, S.; Cai, D.; Wang, W.; Xu, C.; Zhang, K.; Wang, Y. A Fault Location Method for Medium Voltage Distribution Network Based on Ground Fault Transfer Device. Electronics 2023, 12, 4790. https://doi.org/10.3390/electronics12234790
Sun G, Ma W, Wei S, Cai D, Wang W, Xu C, Zhang K, Wang Y. A Fault Location Method for Medium Voltage Distribution Network Based on Ground Fault Transfer Device. Electronics. 2023; 12(23):4790. https://doi.org/10.3390/electronics12234790
Chicago/Turabian StyleSun, Guanqun, Wang Ma, Shuqing Wei, Defu Cai, Wenzhuo Wang, Chaozheng Xu, Ke Zhang, and Yikai Wang. 2023. "A Fault Location Method for Medium Voltage Distribution Network Based on Ground Fault Transfer Device" Electronics 12, no. 23: 4790. https://doi.org/10.3390/electronics12234790
APA StyleSun, G., Ma, W., Wei, S., Cai, D., Wang, W., Xu, C., Zhang, K., & Wang, Y. (2023). A Fault Location Method for Medium Voltage Distribution Network Based on Ground Fault Transfer Device. Electronics, 12(23), 4790. https://doi.org/10.3390/electronics12234790