
Prediction of the Deformation of Heritage Building Communities under the Integration of Attention Mechanisms and SBAS Technology


Abstract
:1. Introduction
- (1)
- With SBAS-InSAR technology, it is possible to effectively process interference data from multiple time phases, thereby obtaining high-precision surface deformation information, effectively reducing nonlinear deformations on the Earth’s surface, such as terrain, land use changes, etc., making the deforming signals more obvious. By adopting multiple small base line combinations, large range values and more phase measurements can be obtained, thus improving the accuracy of deformed measurement and effectively handling SAR data under different seasonal and weather conditions, so as to obtain more accurate formation information.
- (2)
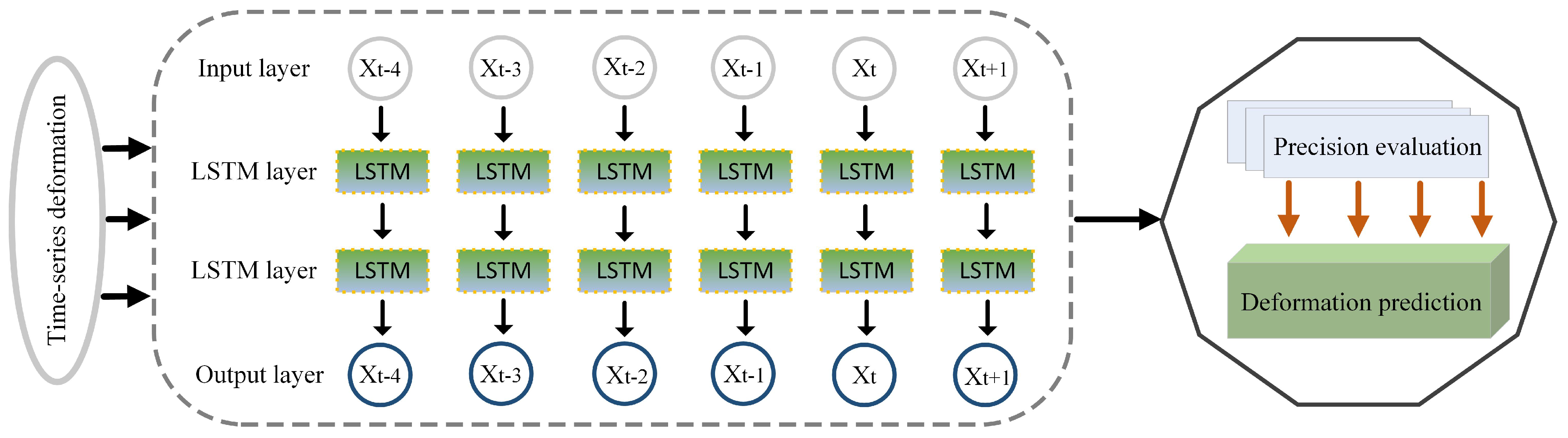
- By leveraging LSTM’s capabilities in adaptive receptive fields, context modeling, and multi-level, multi-scale feature extraction, predictive models in remote sensing image analysis can more accurately capture crucial information within the data, thereby enhancing the quality and reliability of prediction outcomes.
- (3)
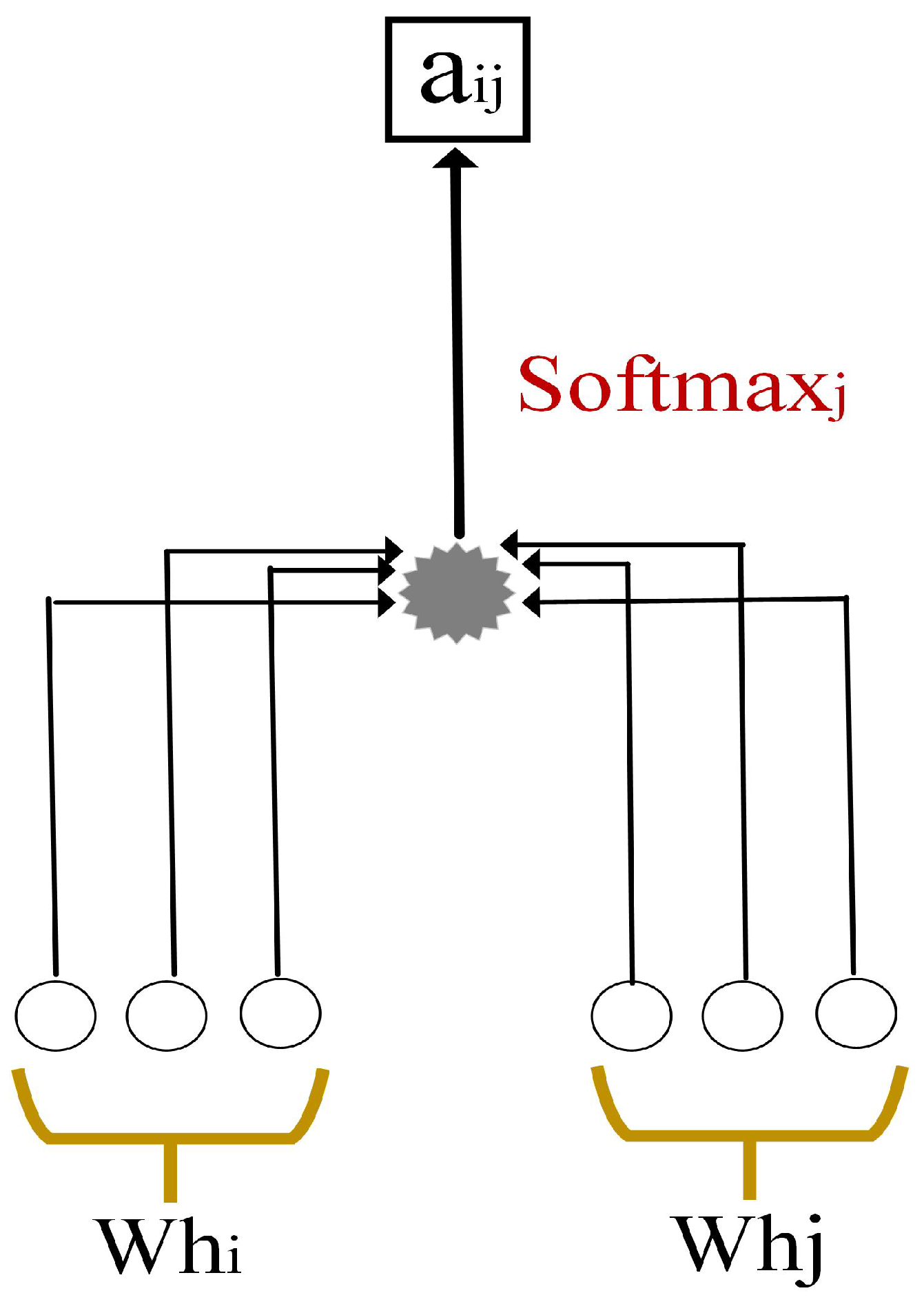
- By incorporating an attention mechanism, the model can adaptively select features and weigh them, enhancing the model’s perception of crucial information within the data. This not only improves the accuracy of predicting deformations in architectural clusters but also increases the interpretability of the model.
2. Related Work
3. Method
3.1. SBAS Technology
- (1)
- Extracting high coherence points in a time series. The average interferogram in the SBAS method is used to select high coherence points in the time series, and the set short temporal and spatial baselines are used to ensure the quantity of coherence points.
- (2)
- After extracting high coherence points from the time series, I will select the high coherence points from the extracted time series that are located at the same positions in two or more sets of different source interference images.
- (3)
- The selected reference point should be a stable and passive interferogram, and its backscatter characteristics should be similar to the SAR data from different sources. To address the potential occurrence of large-scale incoherent and coherent deviations in the interferogram, set the coherence threshold to be greater than 0.18.
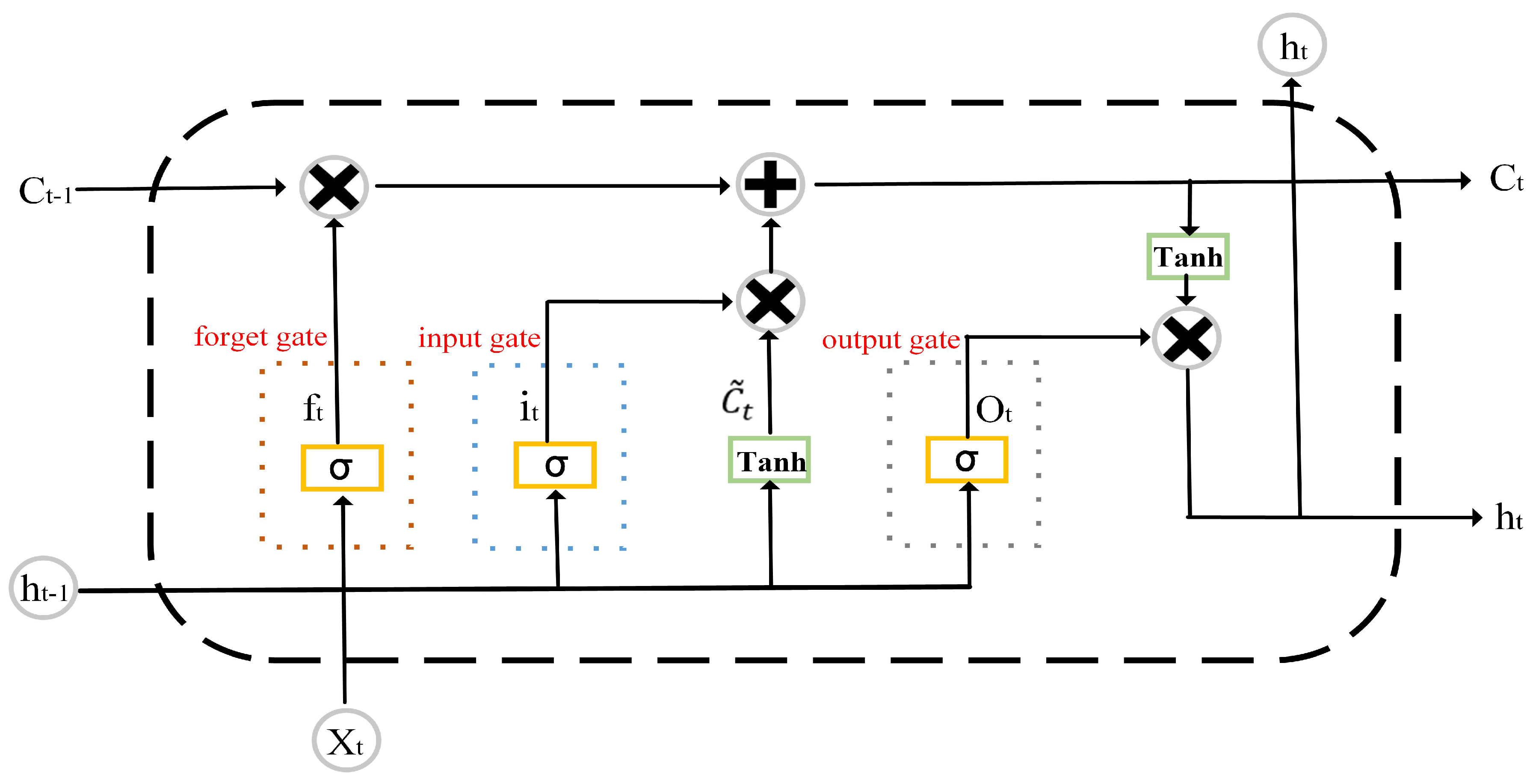
3.2. LSTM
| Algorithm 1: Display of overall algorithm structure of motion recognition |
 |
3.3. Attention Mechanism
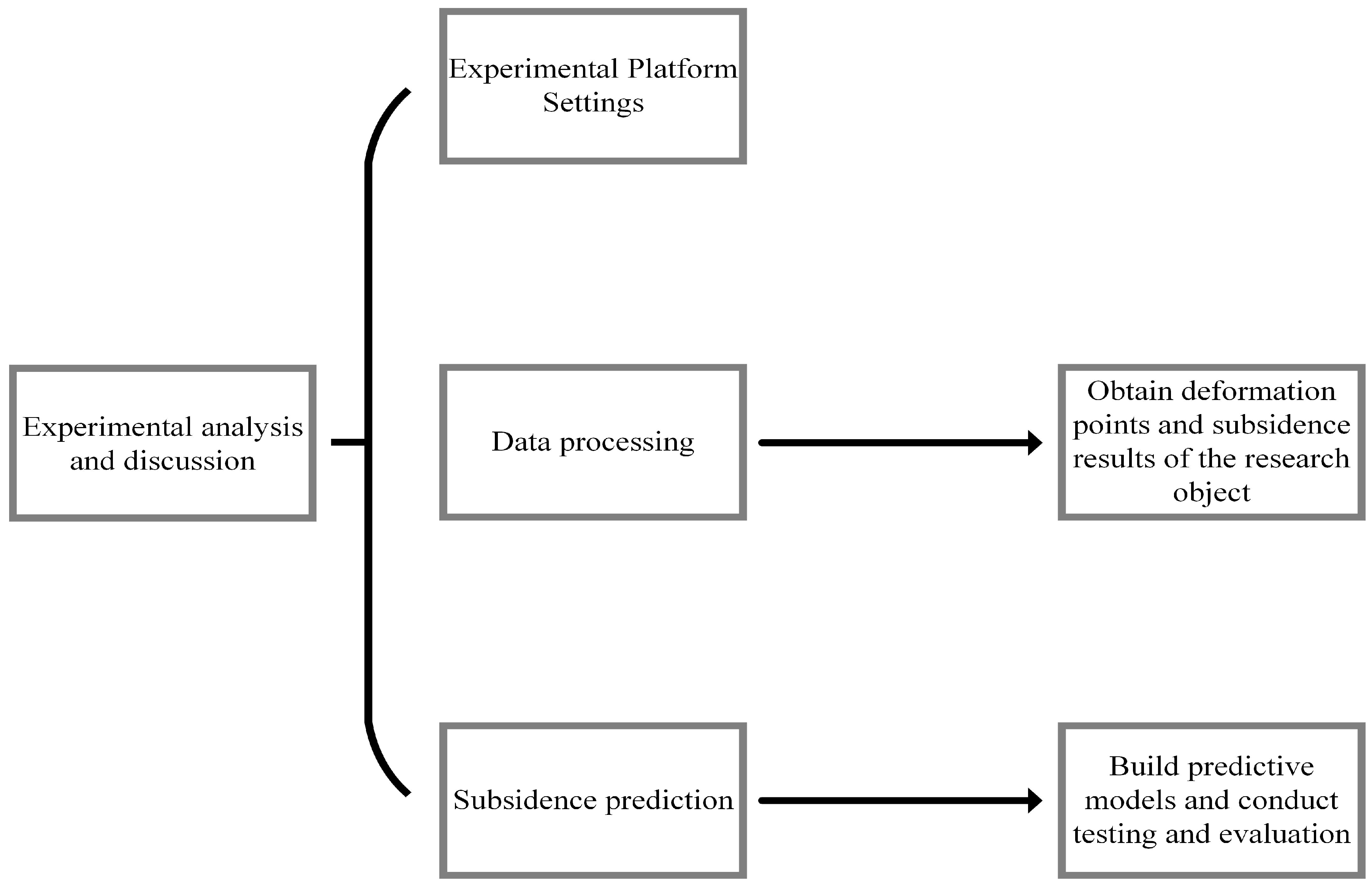
4. Experiment
4.1. Experimental Platform and Settings
4.2. Data Processing
4.3. Subsidence Prediction
5. Discussion
6. Conclusions
- (1)
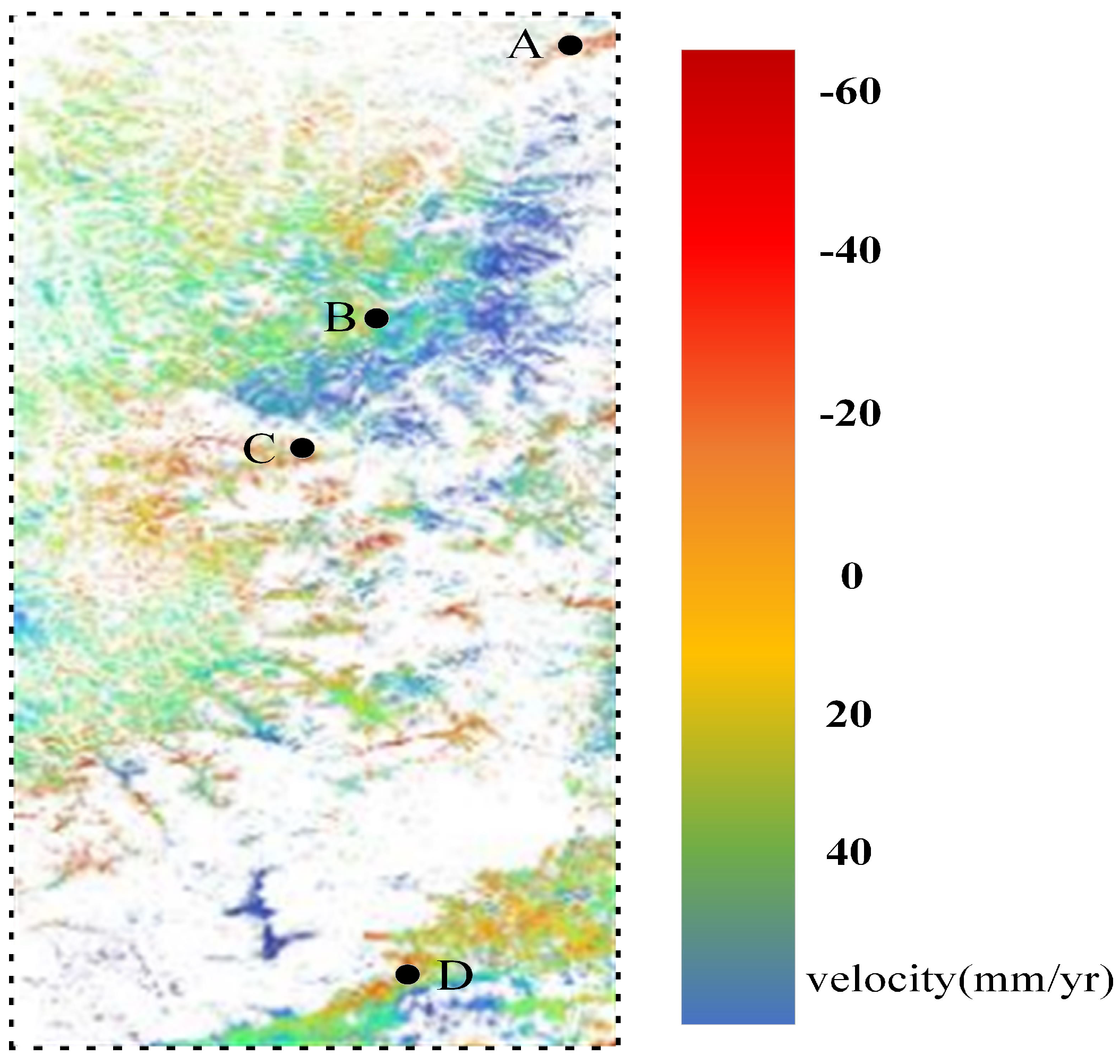
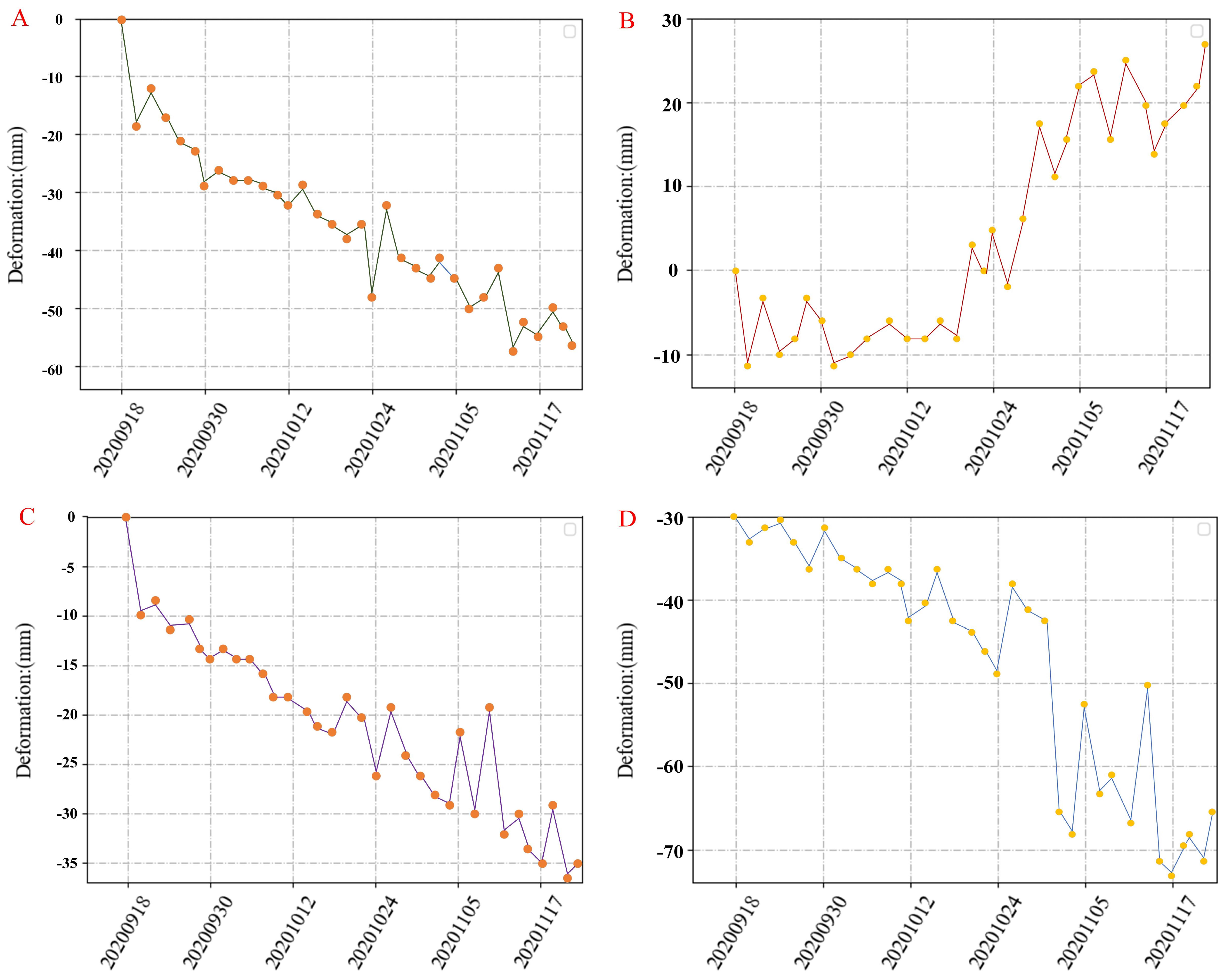
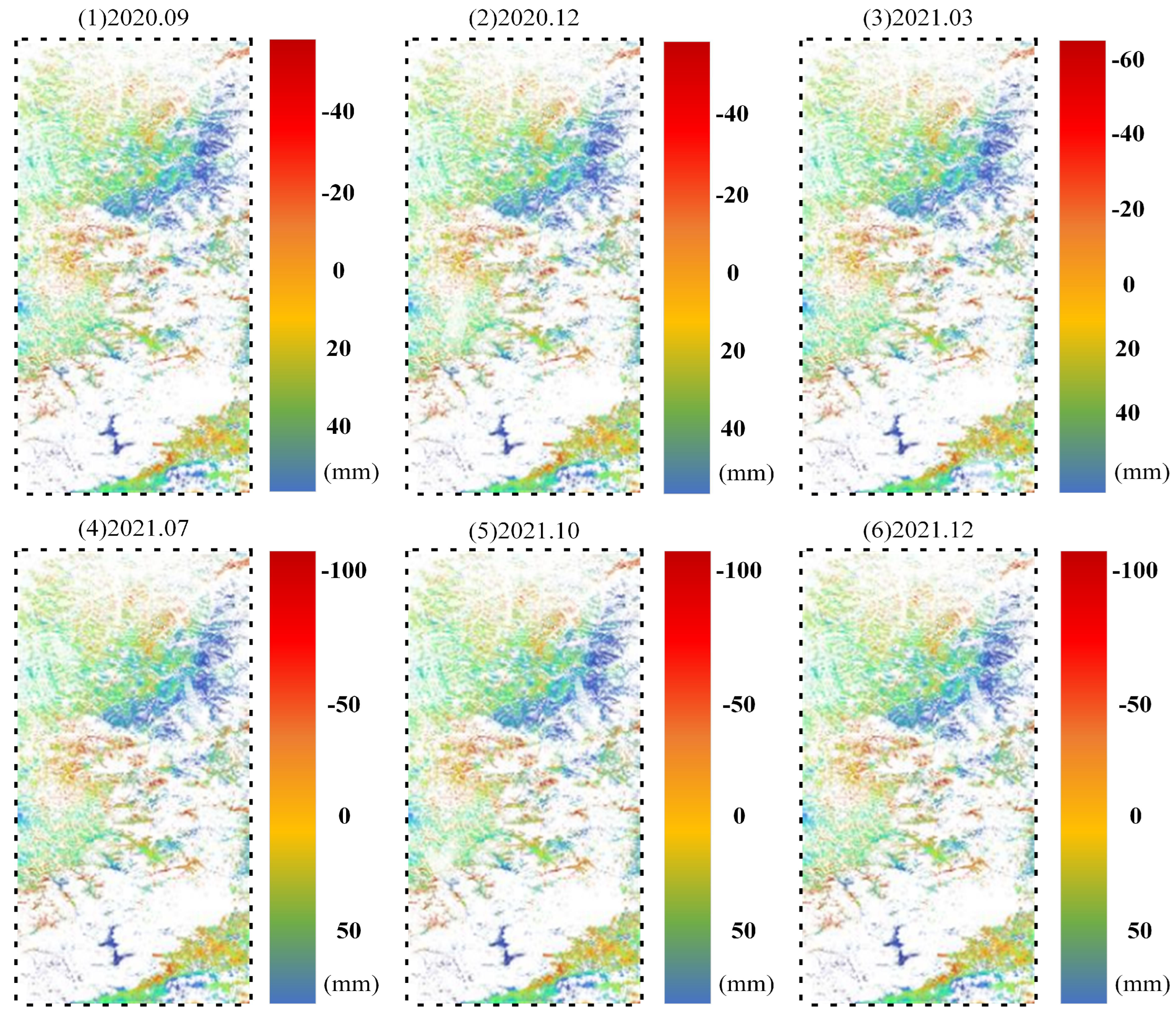
- According to the research findings, the subsidence rate in the study area ranged from −65 to 50 mm/year from September 2020 to December 2021, and the land subsidence rate gradually increased. In December 2021, the cumulative subsidence in the Loss direction reached −65 mm. The spatial distribution of ground subsidence in the study area is uneven. The cumulative effects have increased from west to east. These phenomena pose a significant threat to the heritage building in the study area, and ground subsidence is an irreversible geological hazard. Therefore, it is necessary to conduct investigations on the heritage building in the study area and play a proactive role in prevention.
- (2)
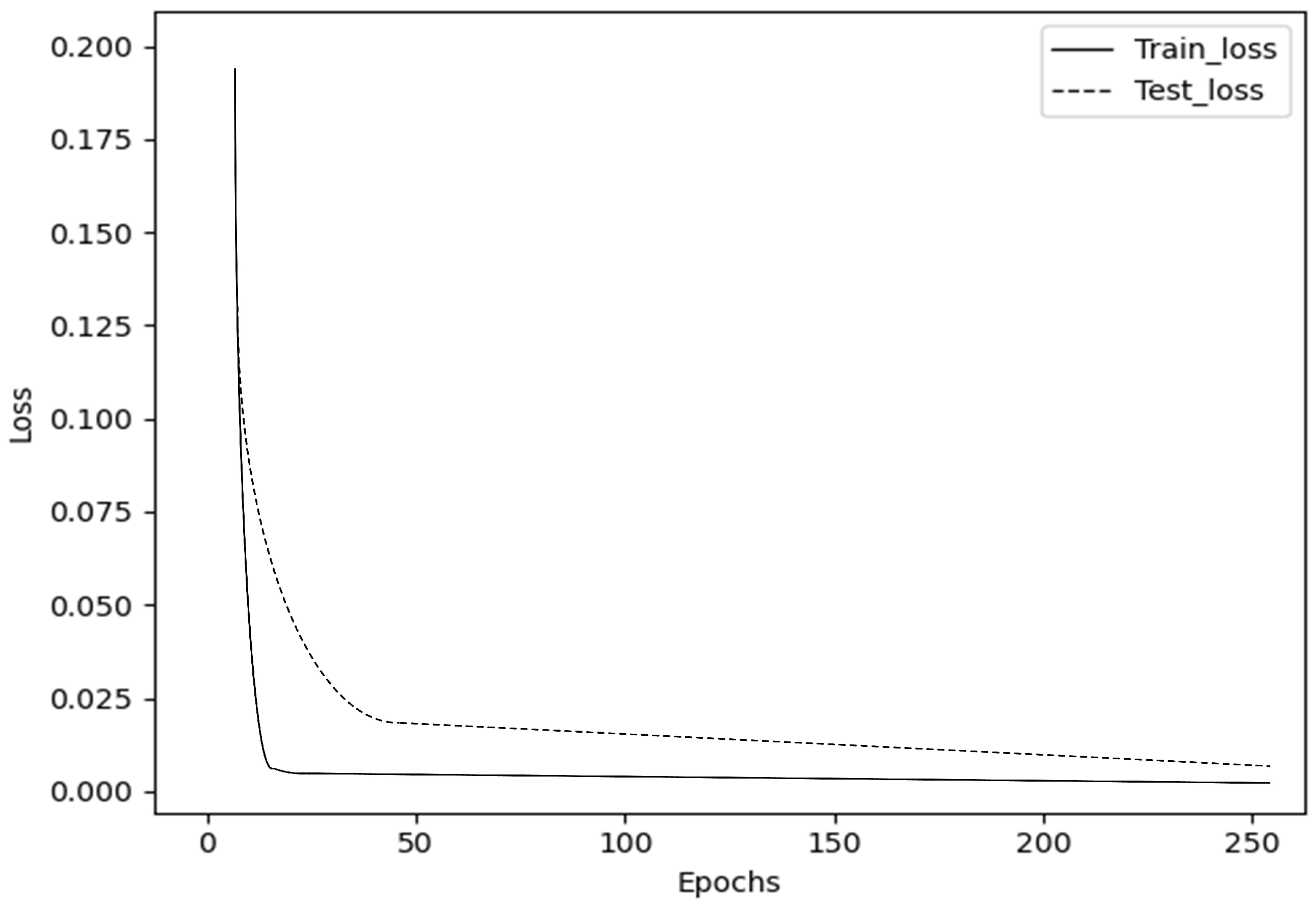
- The LSTM neural network prediction model is built based on time series SBAS-InSAR results to predict the dynamic surface subsidence in the mining area using the Richards model. Through model design, training, and parameter selection, the LSTM neural network model achieves relatively high accuracy. However, it cannot learn well due to the noise and seasonal effects in the data. We speculate that this is caused by the uncertainty of seasonal variations and noise.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LSTM | Long Short-Term Memory |
| SBAS-InSAR | Satellite-Based Augmentation System Interferometric Synthetic Aperture Radar |
| PS-InSAR | Persistent Scatterers Interferometric Synthetic Aperture Radar |
| CNN | Convolutional Neural Network |
| D-InSAR | Differential Interferometric Synthetic Aperture Radar |
| ERS SAR | European Remote Sensing Satellite Synthetic Aperture Radar |
| SNR | Signal-to-Noise ratio |
| RNN | Recurrent Neural Network |
References
- Wang, J.; Li, C.; Li, L.; Huang, Z.; Wang, C.; Zhang, H.; Zhang, Z. Insar time-series deformation forecasting surrounding salt lake using deep transformer models. Sci. Total Environ. 2023, 858, 159744. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, J. Integrating sbas-insar and at-lstm for time-series analysis and prediction method of ground subsidence in mining areas. Remote Sens. 2023, 15, 3409. [Google Scholar] [CrossRef]
- Ourang, S. Evaluation of Inter-Organizational Coordination of Housing Services in Rural Alaska through Social Network Analysis. Master’s Thesis, Iowa State University, Ames, IA, USA, 2022. [Google Scholar] [CrossRef]
- Zhang, M.; Xie, K.; Zhang, Y.-H.; Wen, C.; He, J.-B. Fine segmentation on faces with masks based on a multistep iterative segmentation algorithm. IEEE Access 2022, 10, 75742–75753. [Google Scholar] [CrossRef]
- Meng, F.; Jagadeesan, L.; Thottan, M. Model-based reinforcement learning for service mesh fault resiliency in a web application-level. arXiv 2021, arXiv:2110.13621. [Google Scholar]
- Wu, J.; Tao, R.; Zhao, P.; Martin, N.F.; Hovakimyan, N. Optimizing nitrogen management with deep reinforcement learning and crop simulations. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–20 June 2022; pp. 1712–1720. [Google Scholar]
- Tang, Z.; Chen, T.; Liu, K.; Du, H.; Podkolzin, S.G. Atomic, molecular and hybrid oxygen structures on silver. Langmuir 2021, 37, 11603–11610. [Google Scholar] [CrossRef]
- D’Emilia, G.; Gaspari, A.; Marsella, S.; Marzoli, M.; Natale, E. Calibration issues of a total station for the assessment of buildings in emergency conditions. In Proceedings of the 2022 IEEE International Workshop on Metrology for Living Environment (MetroLivEn), Cosenza, Italy, 25–27 May 2022; pp. 81–85. [Google Scholar]
- Vadivel, S.K.P.; Kim, D.-J. Urban subsidence monitoring in pohang city using time-series insar technique. In Proceedings of the 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, 19–21 October 2022; pp. 913–916. [Google Scholar]
- Dong, L.K.; Tang, F.Q. Experimental research on radar remote sensing monitoring of coal mining subsidence in loess mining area. In Proceedings of the 2018 Fifth International Workshop on Earth Observation and Remote Sensing Applications (EORSA), Xi’an, China, 18–20 June 2018; pp. 1–5. [Google Scholar]
- Li, Z.; Wu, Q.; Cheng, B.; Cao, L.; Yang, H. Remote sensing image scene classification based on object relationship reasoning cnn. IEEE Geosci. Remote. Sens. Lett. 2020, 19, 1–5. [Google Scholar] [CrossRef]
- Zhang, Y.-H.; Wen, C.; Zhang, M.; Xie, K.; He, J.-B. Fast 3d visualization of massive geological data based on clustering index fusion. IEEE Access 2022, 10, 28821–28831. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Z.; Liu, Z. Reduction of atmospheric effects on insar observations through incorporation of gacos and pca into small baseline subset insar. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5209115. [Google Scholar] [CrossRef]
- Mao, W.; Wang, X.; Liu, G.; Pirasteh, S.; Zhang, R.; Lin, H.; Xie, Y.; Xiang, W.; Ma, Z.; Ma, P. Time series insar ionospheric delay estimation, correction, and ground deformation monitoring with reformulating range split-spectrum interferometry. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5213118. [Google Scholar] [CrossRef]
- Bassolia, E.; Grassia, F.; Varzaneha, G.E.; Ponsi, F.; Mancini, F.; Vincenzi, L. A simplified procedure to assess uncertainties in the estimation of the rigid motion of isolated buildings based on insar monitoring. Procedia Struct. Integr. 2023, 44, 1554–1561. [Google Scholar] [CrossRef]
- Li, L.; Wen, B.; Yao, X.; Zhou, Z.; Zhu, Y. Insar-based method for monitoring the long-time evolutions and spatial-temporal distributions of unstable slopes with the impact of water-level fluctuation: A case study in the xiluodu reservoir. Remote Sens. Environ. 2023, 295, 113686. [Google Scholar] [CrossRef]
- Wang, H.; Jia, C.; Ding, P.; Feng, K.; Yang, X.; Zhu, X. Analysis and prediction of regional land subsidence with insar technology and machine learning algorithm. KSCE J. Civ. Eng. 2023, 27, 782–793. [Google Scholar] [CrossRef]
- Zan, F.D.; Saporta, P.; Gomba, G. Spatiotemporal analysis of c-band interferometric phase anomalies over sicily. In Proceedings of the EUSAR 2022; 14th European Conference on Synthetic Aperture Radar, Leipzig, Germany, 25–27 July 2022; pp. 1–4. [Google Scholar]
- Fan, H.; Cheng, D.; Deng, K.; Chen, B.; Zhu, C. Subsidence monitoring using d-insar and probability integral prediction modelling in deep mining areas. Surv. Rev. 2015, 47, 438–445. [Google Scholar] [CrossRef]
- Xiong, S.; Zeng, Q.; Jiao, J.; Gao, S.; Zhang, X. Improvement of ps-insar atmospheric phase estimation by using wrf model. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; pp. 2225–2228. [Google Scholar]
- Serva, S.; Fiorentino, C.; Covello, F. The cosmo-skymed seconda generazione key improvements to respond to the user community needs. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 219–222. [Google Scholar]
- Geudtner, D.; Miranda, N.; Navas-Traver, I.; Vega, F.C.; Prats, P.; Yague-Martinez, N.; Breit, H.; Zan, F.D.; Larsen, Y.; Recchia, A.; et al. Sentinel-1a/b sar and insar performance. In Proceedings of the EUSAR 2018; 12th European Conference on Synthetic Aperture Radar, Aachen, Germany, 4–7 June 2018; pp. 1–5. [Google Scholar]
- He, S.; Wang, J.; Yang, F.; Chang, T.-L.; Tang, Z.; Liu, K.; Liu, S.; Tian, F.; Liang, J.-F.; Du, H.; et al. Bacterial detection and differentiation of staphylococcus aureus and escherichia coli utilizing long-period fiber gratings functionalized with nanoporous coated structures. Coatings 2023, 13, 778. [Google Scholar] [CrossRef]
- Liu, H.; Yuan, M.; Li, M.; Li, B.; Zhang, H.; Wang, J. An efficient and fully refined deformation extraction method for deriving mining-induced subsidence by the joint of probability integral method and sbas-insar. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5208717. [Google Scholar] [CrossRef]
- Meng, F.; Zhang, L.; Wang, Y. Fedemb: An efficient vertical and hybrid federated learning algorithm using partial network embedding. 2023; anonymous preprint under review. [Google Scholar]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential sar interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Graves, A.; Graves, A. Long short-term memory. In Supervised Sequence Labelling with Recurrent Neural Networks; Springer: Berlin, Germany, 2012; pp. 37–45. [Google Scholar]
- Kawakami, K. Supervised Sequence Labelling with Recurrent Neural Networks. Ph.D. Dissertation, Technical University of Munich, Munich, Germany, 2008. [Google Scholar]
- He, J.-Y.; Wu, X.; Cheng, Z.-Q.; Yuan, Z.; Jiang, Y.-G. Db-lstm: Densely-connected bi-directional lstm for human action recognition. Neurocomputing 2021, 444, 319–331. [Google Scholar] [CrossRef]
- Fan, C.; Li, Y.; Yi, L.; Xiao, L.; Qu, X.; Ai, Z. Multi-objective lstm ensemble model for household short-term load forecasting. Memetic Comput. 2022, 14, 115–132. [Google Scholar] [CrossRef]
- Chen, K.; Zhou, Y.; Dai, F. A lstm-based method for stock returns prediction: A case study of china stock market. In Proceedings of the 2015 IEEE International Conference on Big Data (Big Data), Santa Clara, CA, USA, 29 October–1 November 2015; pp. 2823–2824. [Google Scholar]
- Liu, K.; Chen, T.; He, S.; Robbins, J.P.; Podkolzin, S.G.; Tian, F. Observation and identification of an atomic oxygen structure on catalytic gold nanoparticles. Angew. Chem. 2017, 129, 13132–13137. [Google Scholar] [CrossRef]
- Du, Y.; Du, L.; Li, L. An sar target detector based on gradient harmonized mechanism and attention mechanism. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Moeinifard, P.; Rajabi, M.S.; Bitaraf, M. Lost vibration test data recovery using convolutional neural network: A case study. arXiv 2022, arXiv:2204.05440. [Google Scholar]
- Wu, J.; Hovakimyan, N.; Hobbs, J. Genco: An auxiliary generator from contrastive learning for enhanced few-shot learning in remote sensing. arXiv 2023, arXiv:2307.14612. [Google Scholar]
- Fu, R.; Zhang, Z.; Li, L. Using lstm and gru neural network methods for traffic flow prediction. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; pp. 324–328. [Google Scholar]
- Kong, W.; Dong, Z.Y.; Jia, Y.; Hill, D.J.; Xu, Y.; Zhang, Y. Short-term residential load forecasting based on lstm recurrent neural network. IEEE Trans. Smart Grid 2017, 10, 841–851. [Google Scholar] [CrossRef]
- Qu, X.; Yang, J.; Chang, M. A deep learning model for concrete dam deformation prediction based on rs-lstm. J. Sens. 2019, 2019, 4581672. [Google Scholar] [CrossRef]
- Bao, X.; Zhang, R.; Shama, A.; Li, S.; Xie, L.; Lv, J.; Fu, Y.; Wu, R.; Liu, G. Ground deformation pattern analysis and evolution prediction of shanghai pudong international airport based on psi long time series observations. Remote Sens. 2022, 14, 610. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Band | C |
| Wavelength | 5.55 cm |
| Incidence angle | 34.05 |
| Azimuth angle | −166.08 |
| Direction | descending |
| Sensor mode | IW |
| Platform | 1A |
| Time span | 2020/9–2021/12 |
| Temporal interval | 12 days |
| Number of images | 39 |
| Hyperparameter Name | Value |
|---|---|
| LSTM_units | 48 |
| Batch_size | 1 |
| Dropout | 0.2 |
| Epochs | 260 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, C.; Lu, B. Prediction of the Deformation of Heritage Building Communities under the Integration of Attention Mechanisms and SBAS Technology. Electronics 2023, 12, 4724. https://doi.org/10.3390/electronics12234724
Ma C, Lu B. Prediction of the Deformation of Heritage Building Communities under the Integration of Attention Mechanisms and SBAS Technology. Electronics. 2023; 12(23):4724. https://doi.org/10.3390/electronics12234724
Chicago/Turabian StyleMa, Chong, and Baoli Lu. 2023. "Prediction of the Deformation of Heritage Building Communities under the Integration of Attention Mechanisms and SBAS Technology" Electronics 12, no. 23: 4724. https://doi.org/10.3390/electronics12234724
APA StyleMa, C., & Lu, B. (2023). Prediction of the Deformation of Heritage Building Communities under the Integration of Attention Mechanisms and SBAS Technology. Electronics, 12(23), 4724. https://doi.org/10.3390/electronics12234724