
Decentralized Controller Design for Large-Scale Uncertain Discrete-Time Systems with Non-Block-Diagonal Output Matrix


{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and Problem Formulation
2.1. System Description
2.2. Stability Conditions
- , when an interaction exists between subsystems i and j;
- , when no interaction exists between subsystems i and j.
3. Main Steps for a Decentralized Stabilization Controller Design
- Transformation of the system to the form with an output block-diagonal matrix.
- Robust stability conditions for a descriptor system.
- Robust stability conditions of a large-scale system under decentralized control.
- Subsystem model augmentation for PID controllers designed at the subsystem level.
3.1. Transformation of the Output Matrix to a Block-Diagonal Form
3.2. Robust Stability of Uncertain Descriptor System
3.3. Robust Stability of Large-Scale System with Decentralized Control
- If the obtained , the uncertain descriptor complex system is impulse-free and asymptotically stable.
- If the obtained , the uncertain complex system is not stable.
3.4. PID Controller as a Static Output Feedback
4. Robust Decentralized Controller Design
4.1. Regional Pole Placement Approach to Descriptor Systems
4.2. Robust Decentralized Control for Descriptor Systems
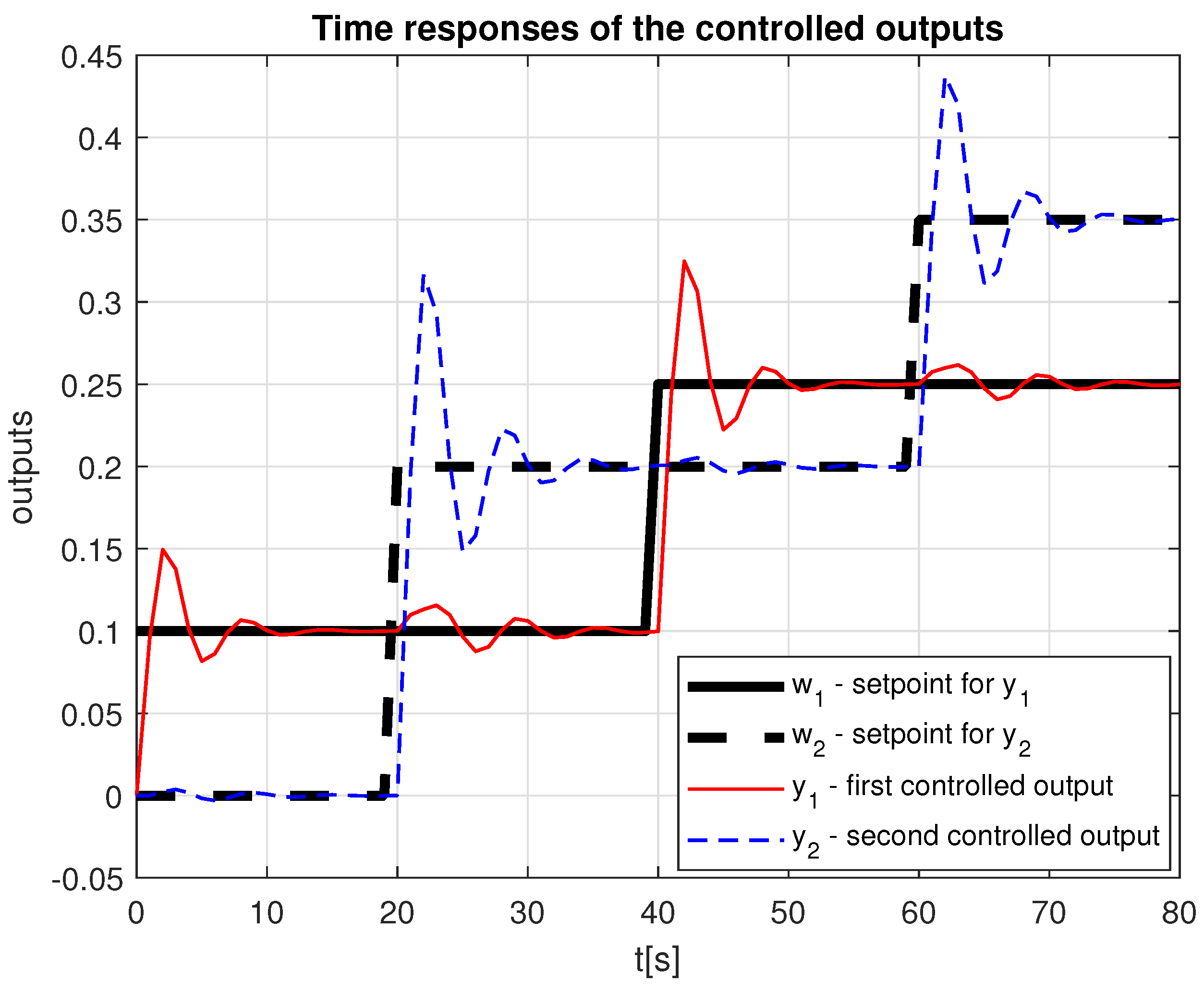
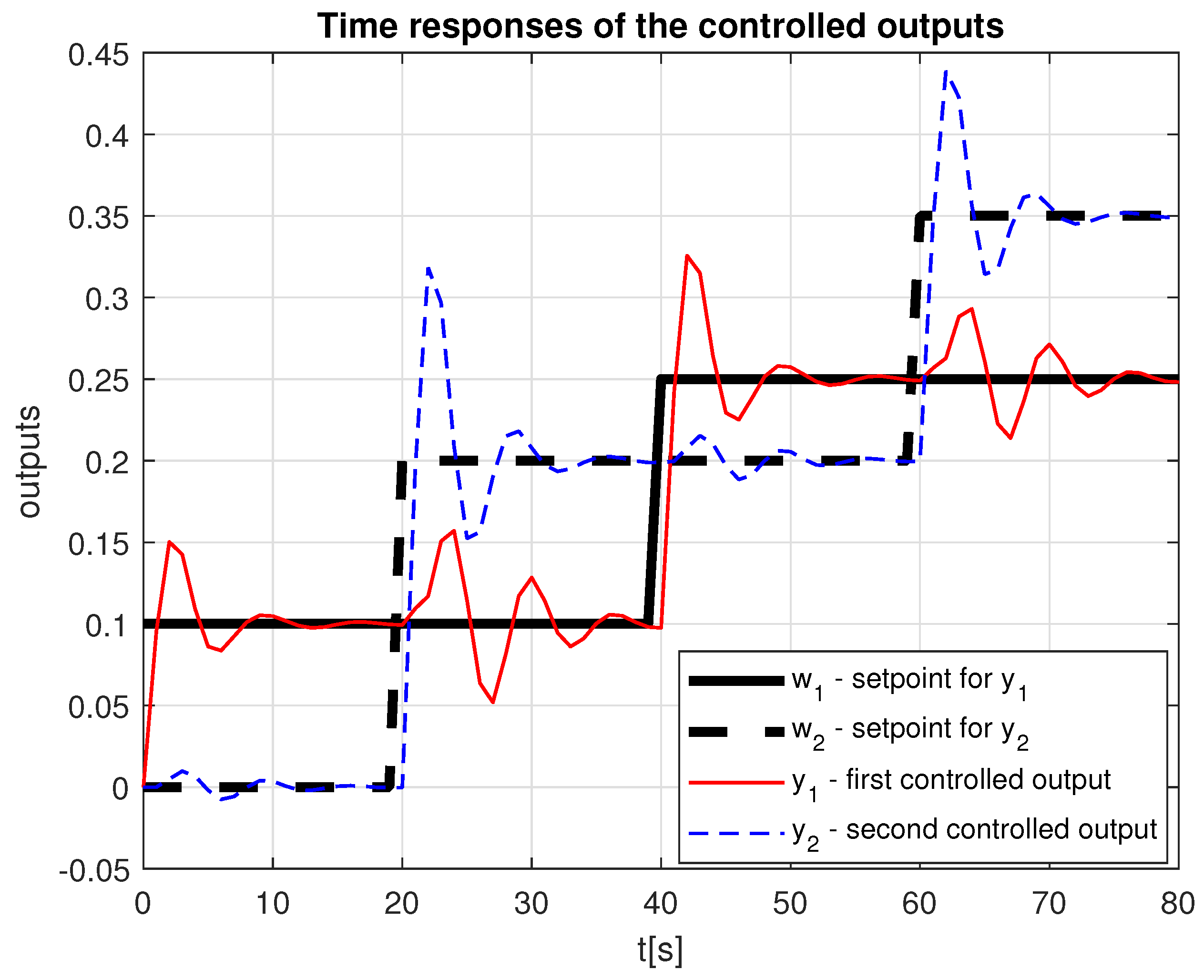
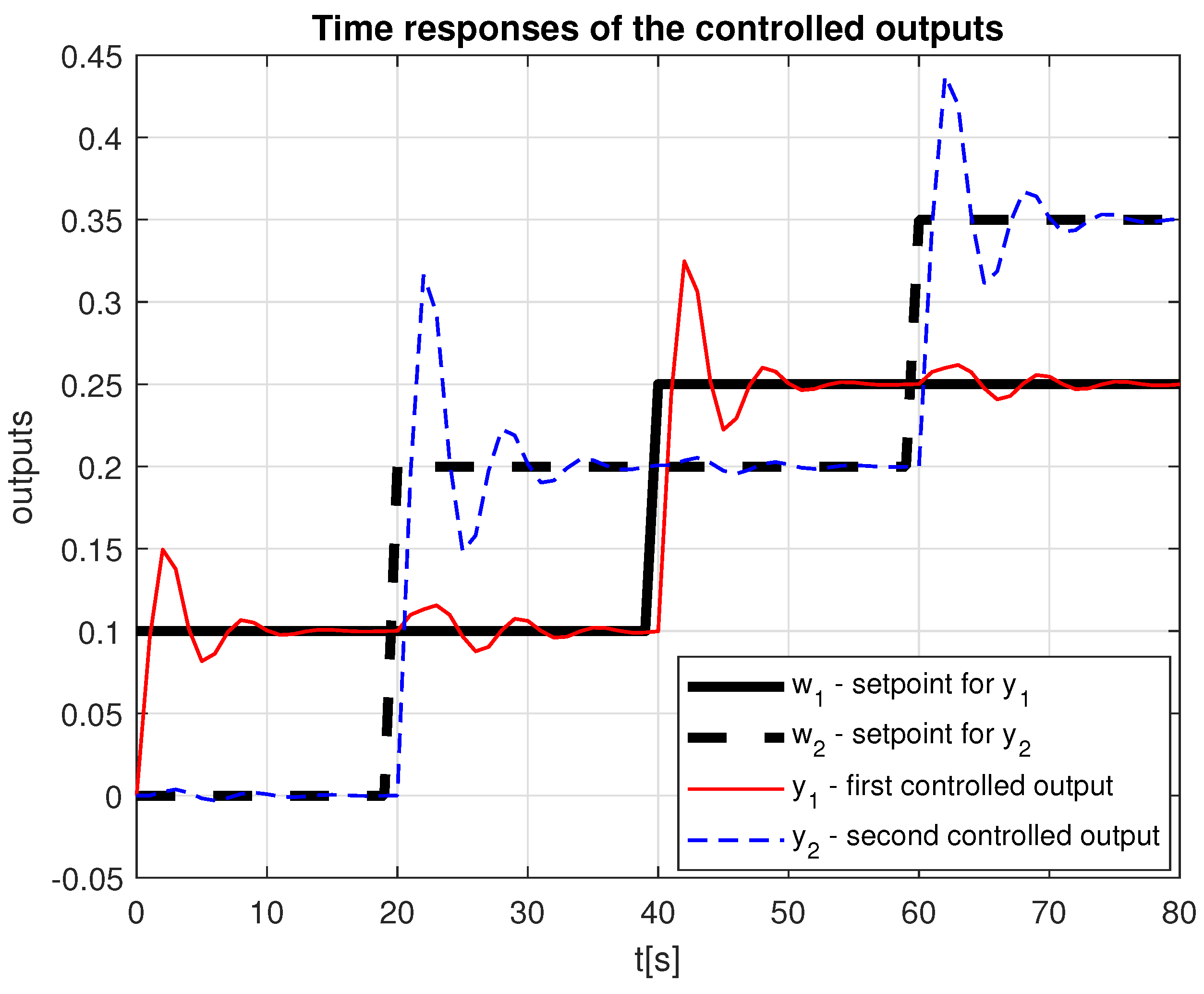
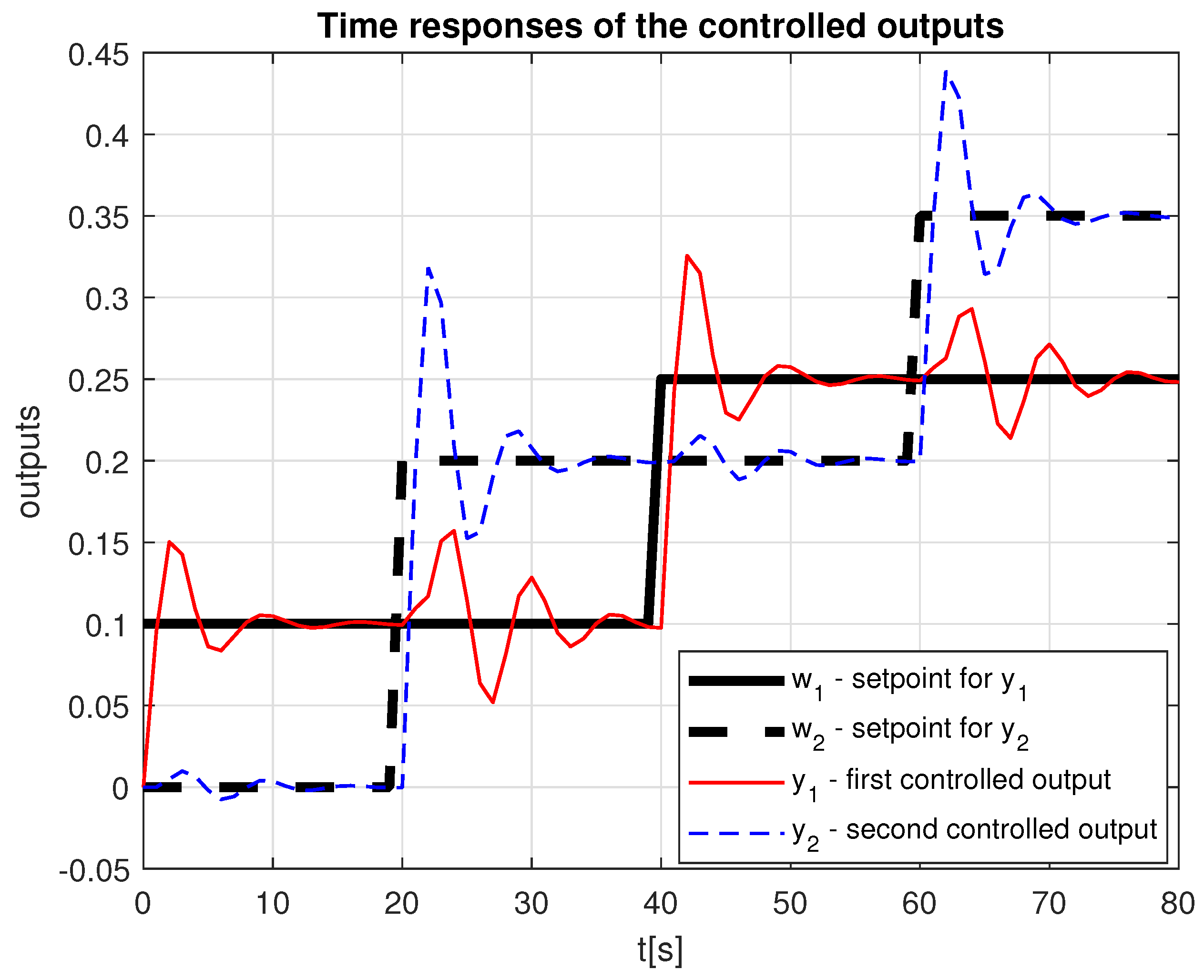
5. Example
- Case A
- (interactions )
- Case B
- (uncertain interactions to )
6. Conclusions
- 1.
- A novel transformation method for discrete-time dynamic systems is proposed, enabling the transformation of a linear state-space system into an uncertain descriptor system with a decentralized structure of input and output matrices appropriate for a decentralized controller design.
- 2.
- Derivation of conditions for determining the stability boundaries of complex descriptor systems and their use in subsystem controller design [20].
- 3.
- Validation of the proposed discrete-time system transformation method using the recently developed decentralized control design approach.
- 4.
- Modification of the regional pole placement method to accommodate descriptor systems.
- 5.
- Demonstration of the effectiveness of the proposed decentralized control design procedure through a practical example.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| LSS | Large-Scale System |
| PID | Proportional Integral Derivative |
| LMI | Linear Matrix Inequality |
| BMI | Bilinear Matrix Inequality |
| VSS | Variable-Structure Systems |
References
- Axelson-Fisk, M.; Knorn, S. Aspects of Fairness in Robust, Distributed Control of Interconnected Systems. In Proceedings of the IEEE Conference on Decision and Control, Jeju, Republic of Korea, 14–18 December 2020; pp. 3084–3089. [Google Scholar]
- Ghanati, G.; Azadi, S. Decentralized robust control of a vehicle’s interior sound field. J. Vib. Control 2020, 26, 1815–18231. [Google Scholar] [CrossRef]
- Mahmud, M.A.; Roy, T.K.; Saha, S.; Enamul Haque, M.; Pota, H.R. Robust Nonlinear Adaptive Feedback Linearizing Decentralized Controller Design for Islanded DC Microgrids. IEEE Trans. Ind. Appl. 2019, 55, 5343–5352. [Google Scholar] [CrossRef]
- Wang, D.; Mu, C. Overview of robust adaptive critic control design, Studies in Systems. Decis. Control 2019, 167, 1–43. [Google Scholar]
- Kant, P.; Singhal, P.; Mahto, M.K.; Jain, D. Control strategies for DC Microgrids: An overview. In Proceedings of the 2022 2nd International Conference on Power Electronics & IoT Applications in Renewable Energy and Its Control (PARC), Mathura, India, 21–22 January 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Dorato, P. Case studies in robust control design: An overview. In Proceedings of the 29th IEEE Conference on Decision and Control, Honolulu, HI, USA, 5–7 December 1990; Volume 4, pp. 2030–2032. [Google Scholar] [CrossRef]
- Siljak, D.D. Large Scale Dynamic Systems, Stability and Structure; Dover Publications: New York, NY, USA, 1978. [Google Scholar]
- Boyd, S.; Ghaoui, L.E.; Feron, E.; Balakrish, V. Linear Matrix Inequalities in System and Control Theory; SIAM: Philadelphia, PA, USA, 1994. [Google Scholar]
- Yuan, L.; Chen, S.; Zhang, C.; Yang, G. Structured controller synthesis through block-diagonal factorization and parameter space optimization. Automatica 2023, 147, 110709. [Google Scholar] [CrossRef]
- Peaucelle, D.; Alzelier, D.; Bachelier, O.; Bernussou, J. A new robust D stability Condition for real Convex polytopic Uncertainty. Syst. Control. Lett. 2000, 40, 21–30. [Google Scholar] [CrossRef]
- Oliveira, M.C. A Robust Version of the Elimination Lemma. In Proceedings of the 16th Triennial IFAC World Congress, Prague, Czech Republic, 3–8 July 2005. [Google Scholar]
- Vesely, V.; Rosinova, D. Robust PID-PSD controller design: BMI approach. Asian J. Control 2013, 15, 469–478. [Google Scholar] [CrossRef]
- Fradkov, A.L. Adaptive Control of Complex Systems. Nauka, Moscow, 1990. Available online: https://www.ipme.ru/ipme/labs/ccs/history.htm (accessed on 11 September 2023).
- Gavel, D.; Siljak, D.D. Decentralized Adaptive Control Structural Conditions for Stability. In Proceedings of the 1988 American Control Conference, Atlanta, GA, USA, 15–17 June 1988. [Google Scholar]
- Hovd, M.; Skogestad, S. Sequantial design of decentralized controllers. Automatica 1994, 30, 1601–1607. [Google Scholar] [CrossRef]
- Kozakova, A.; Vesely, V.; Kucera, V. Robust Decentralized Controller Design Based on Equivalent Subsystems. Automatica 2019, 107, 29–35. [Google Scholar] [CrossRef]
- Morgan, R.G.; Ozguner, U. A decentralized variable structure control algorithm for robotic manipulators. IEEE Trans. Robot. Automat. 1985, 1, 57–65. [Google Scholar] [CrossRef]
- Bakule, L. Decentralized Control: An Overview. Annu. Rev. Control 2008, 32, 87–98. [Google Scholar] [CrossRef]
- Davidson, E.J. Decentralized Control of Large-Scale Systems; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Vesely, V.; Paulusova, J.; Kucera, V. Decentralized controller design for a large-scale linear discrete-time polytopic uncertain systems. Int. J. Syst. Sci. 2022, 53, 3496–3507. [Google Scholar] [CrossRef]
- Veselý, V.; Körösi, L. Decentralized Controller Design for Large-Scale Uncertain Linear Systems with No Block Diagonal Output Matrix. Int. J. Innov. Comput. Inf. Control 2023, 19, 1323–1336. [Google Scholar] [CrossRef]
- Wang, S.H.; Davison, E. On the stabilization of decentralized Control Systems. IEEE Trans. Autom. Control 1973, 18, 473–478. [Google Scholar] [CrossRef]
- Jayanthi, R.; Chidambaran, I.A.; Banusri, C. Decentralized controller gain scheduling using PSO for power system restoration assessment in a two-area interconnected power system. Int. J. Eng. Sci. Technol. 2011, 3, 14–20. [Google Scholar] [CrossRef]
- Debelkovic, D.L.; Visnjic, N.; Pjascic, M. The stability of linear continuous Singular systems in the sense of Lyapunov: An Overview. Sci. Tech. Rev. 2007, LVII, 51–65. [Google Scholar]
- Hovd, M.; Skogestad, S. Improved independent design of robust decentralized control. J. Process. Control 1993, 3, 43–51. [Google Scholar] [CrossRef]
- Davison, E.J.; Chang, T.N. Decentralized Stabilization and pole assignment for general improper systems. In Proceedings of the 1987 American Control Conference, Minneapolis, MN, USA, 10–12 June 1987; pp. 1669–1975. [Google Scholar]
- Matrosov, V.M. On the theory of stability motion. Prikl. Mat. Mekhanika 1962, 26, 992–1002. [Google Scholar] [CrossRef]
- Debeljkovic, D.L.I.; Buzurovic, L.M.; Simenuoviic, G.V. Stability of Linear discrete descriptor systems in the sense of Ljapunov. Int. Inf. Syst. Sci. 2012, 7, 302–322. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rosinová, D.; Körösi, L.; Veselý, V. Decentralized Controller Design for Large-Scale Uncertain Discrete-Time Systems with Non-Block-Diagonal Output Matrix. Electronics 2023, 12, 4358. https://doi.org/10.3390/electronics12204358
Rosinová D, Körösi L, Veselý V. Decentralized Controller Design for Large-Scale Uncertain Discrete-Time Systems with Non-Block-Diagonal Output Matrix. Electronics. 2023; 12(20):4358. https://doi.org/10.3390/electronics12204358
Chicago/Turabian StyleRosinová, Danica, Ladislav Körösi, and Vojtech Veselý. 2023. "Decentralized Controller Design for Large-Scale Uncertain Discrete-Time Systems with Non-Block-Diagonal Output Matrix" Electronics 12, no. 20: 4358. https://doi.org/10.3390/electronics12204358
APA StyleRosinová, D., Körösi, L., & Veselý, V. (2023). Decentralized Controller Design for Large-Scale Uncertain Discrete-Time Systems with Non-Block-Diagonal Output Matrix. Electronics, 12(20), 4358. https://doi.org/10.3390/electronics12204358