

Adaptive Active Inertia Control Strategy of MMC-HVDC Systems for Flexible Frequency Support

Abstract
:1. Introduction
2. Active Inertia Support Control Strategy for MMC-HVDC System
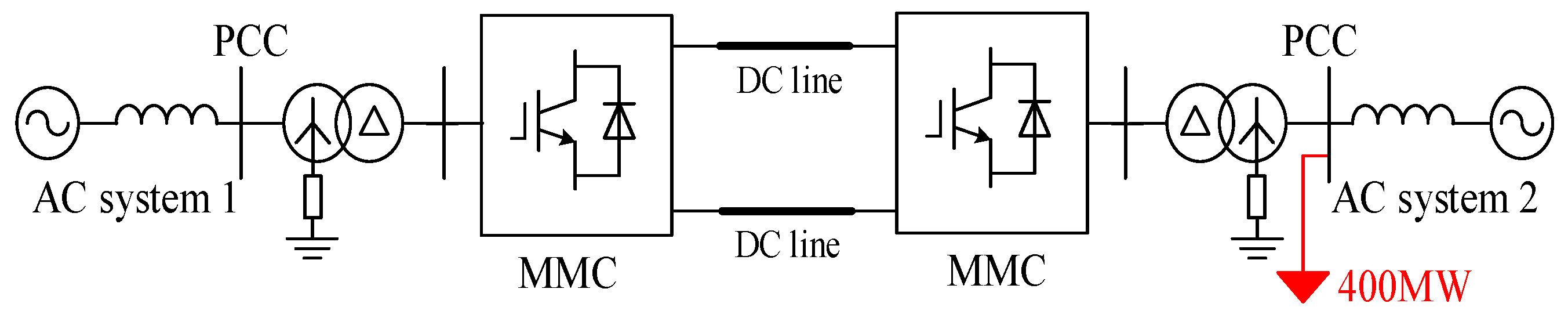
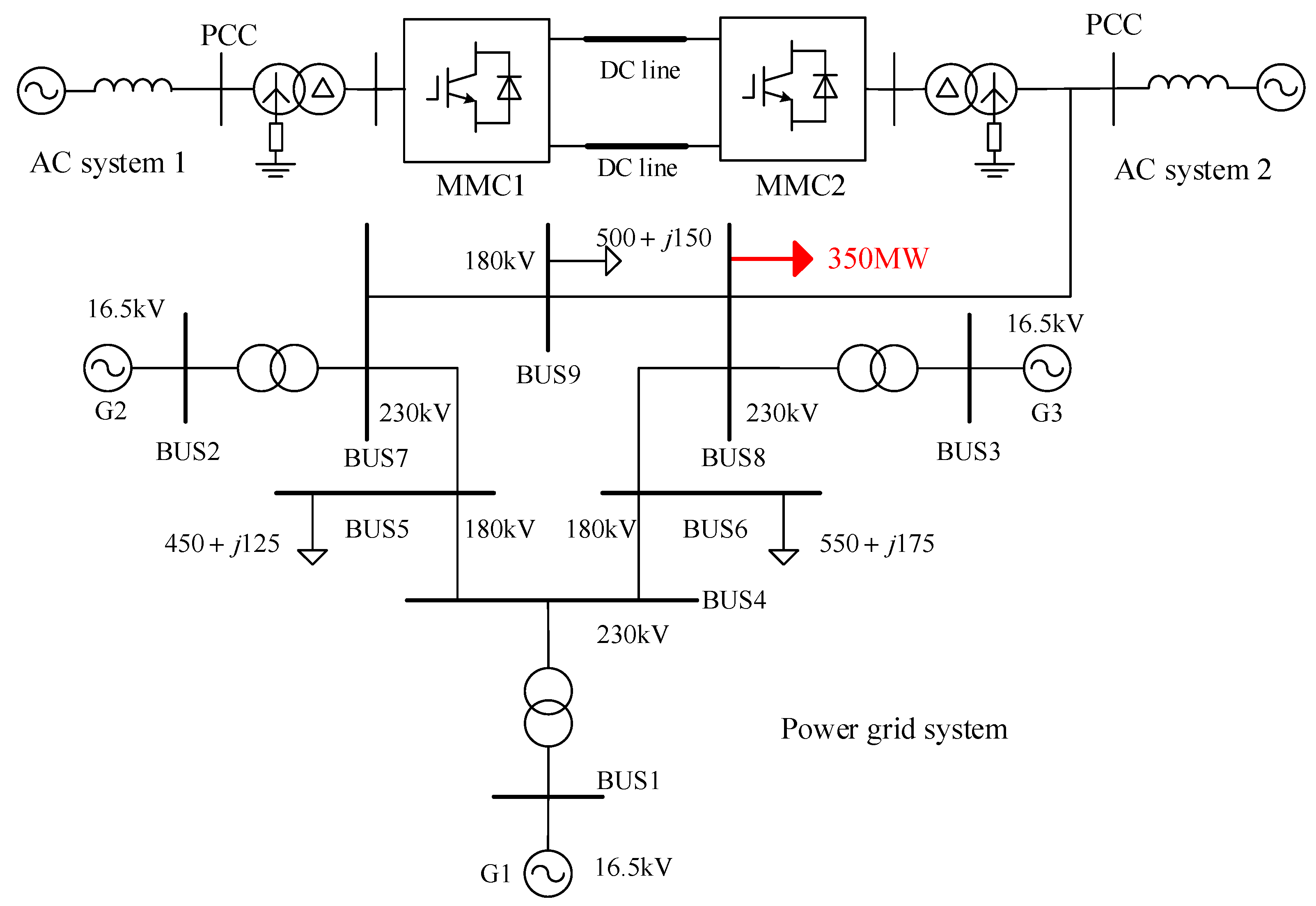
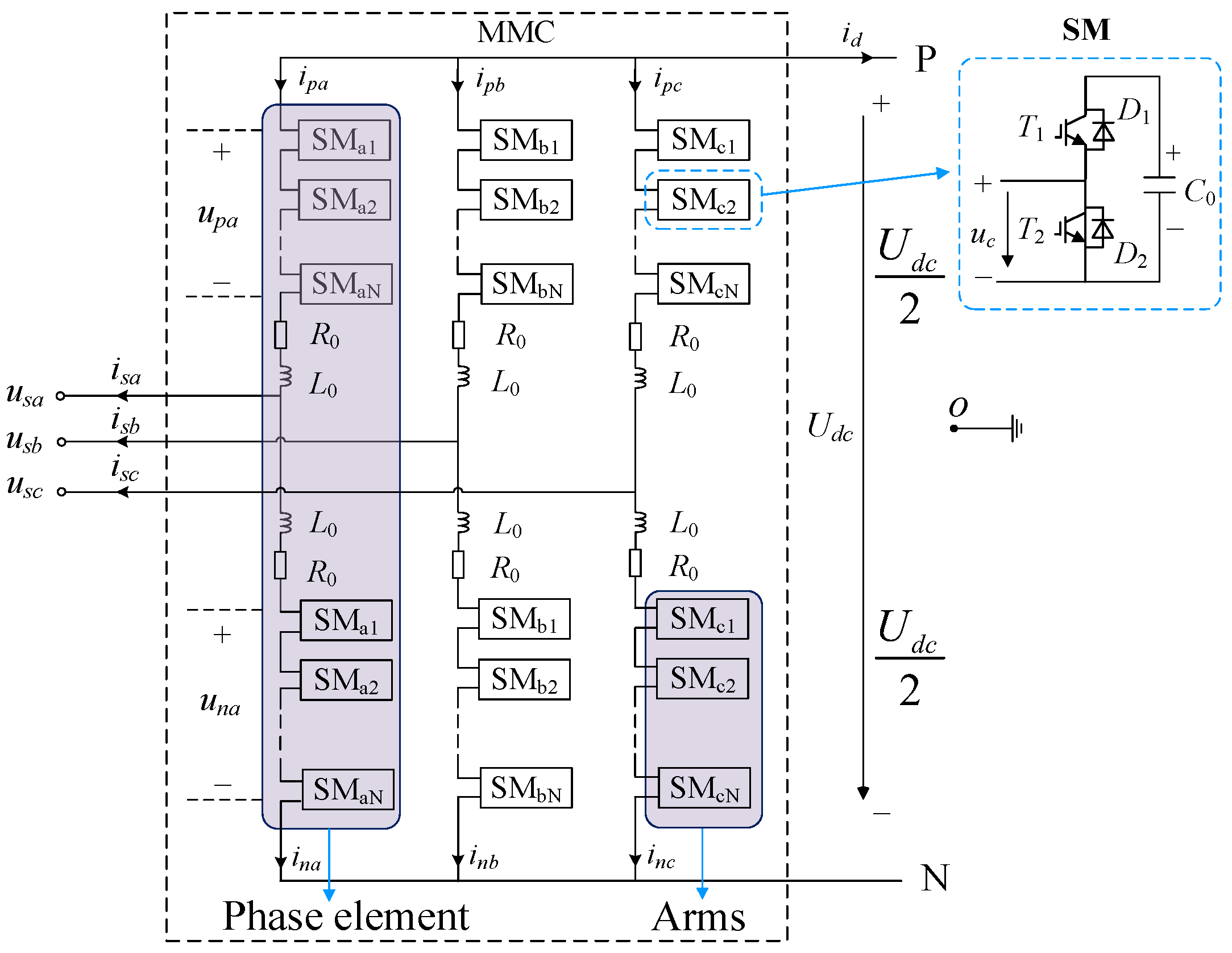
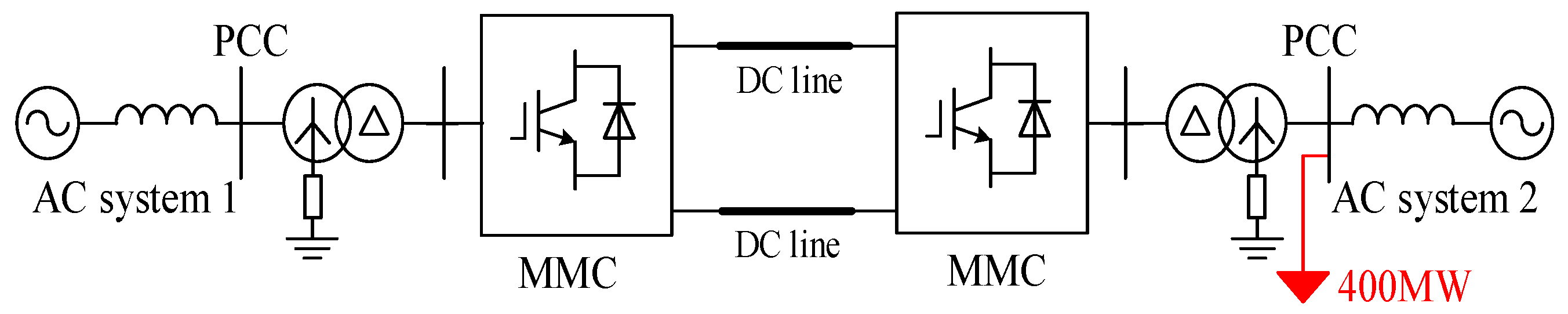
2.1. Typical Architecture of the MMC-HVDC System
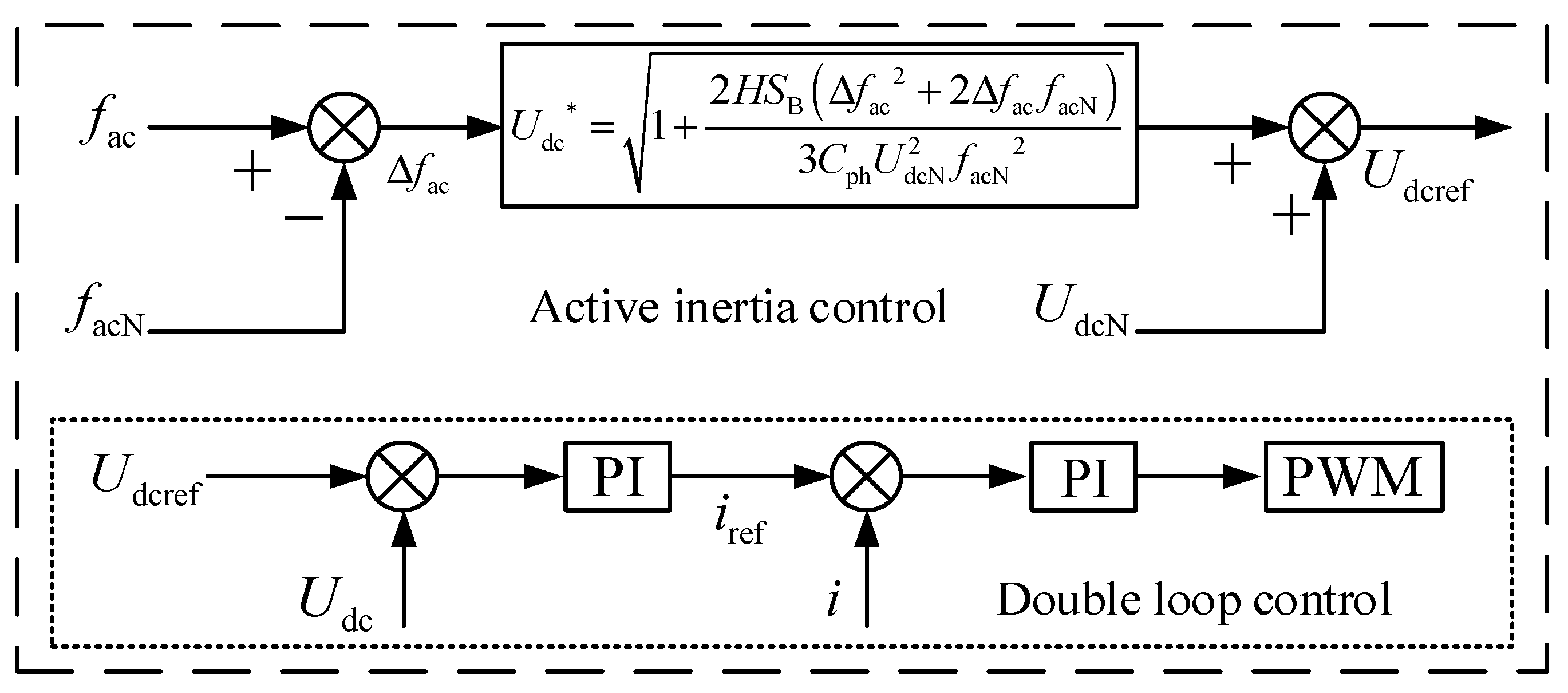
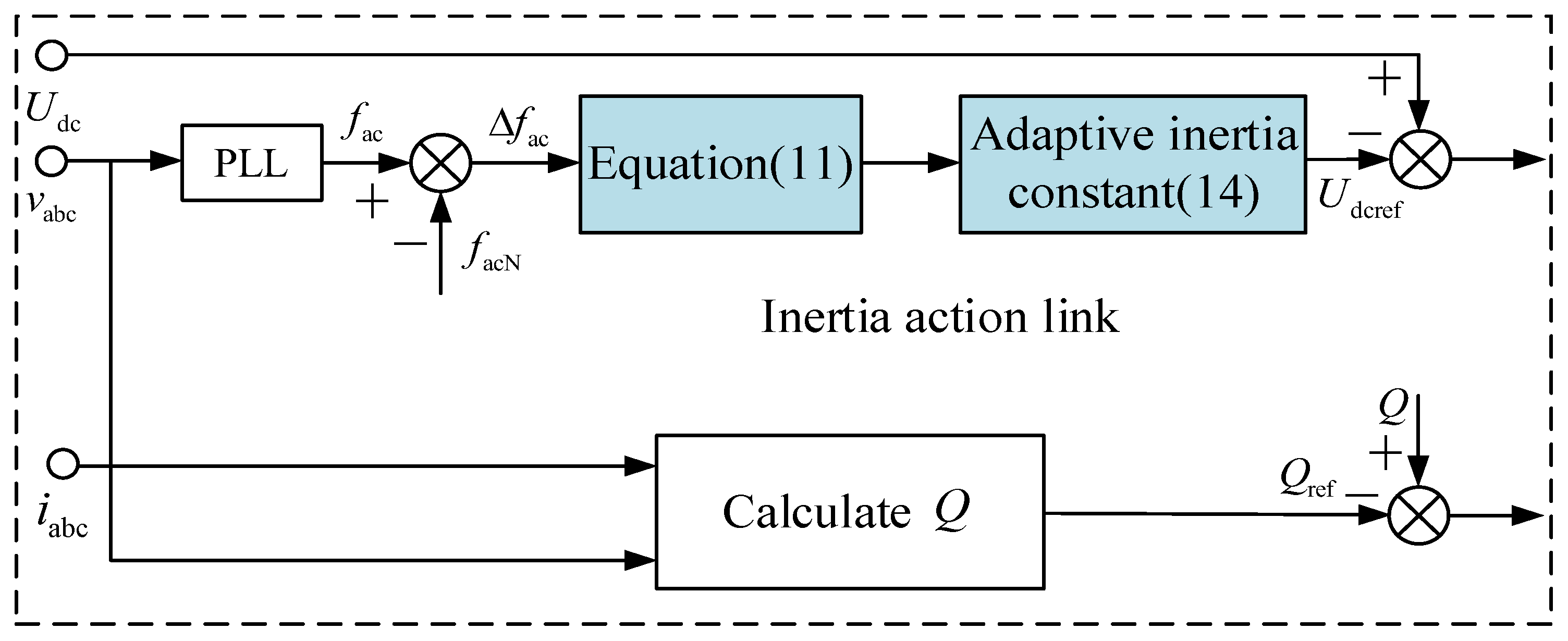
2.2. Active Inertia Support Control Strategy of MMC-HVDC System
3. Adaptive Active Inertia Control Strategy of MMC-HVDC Systems
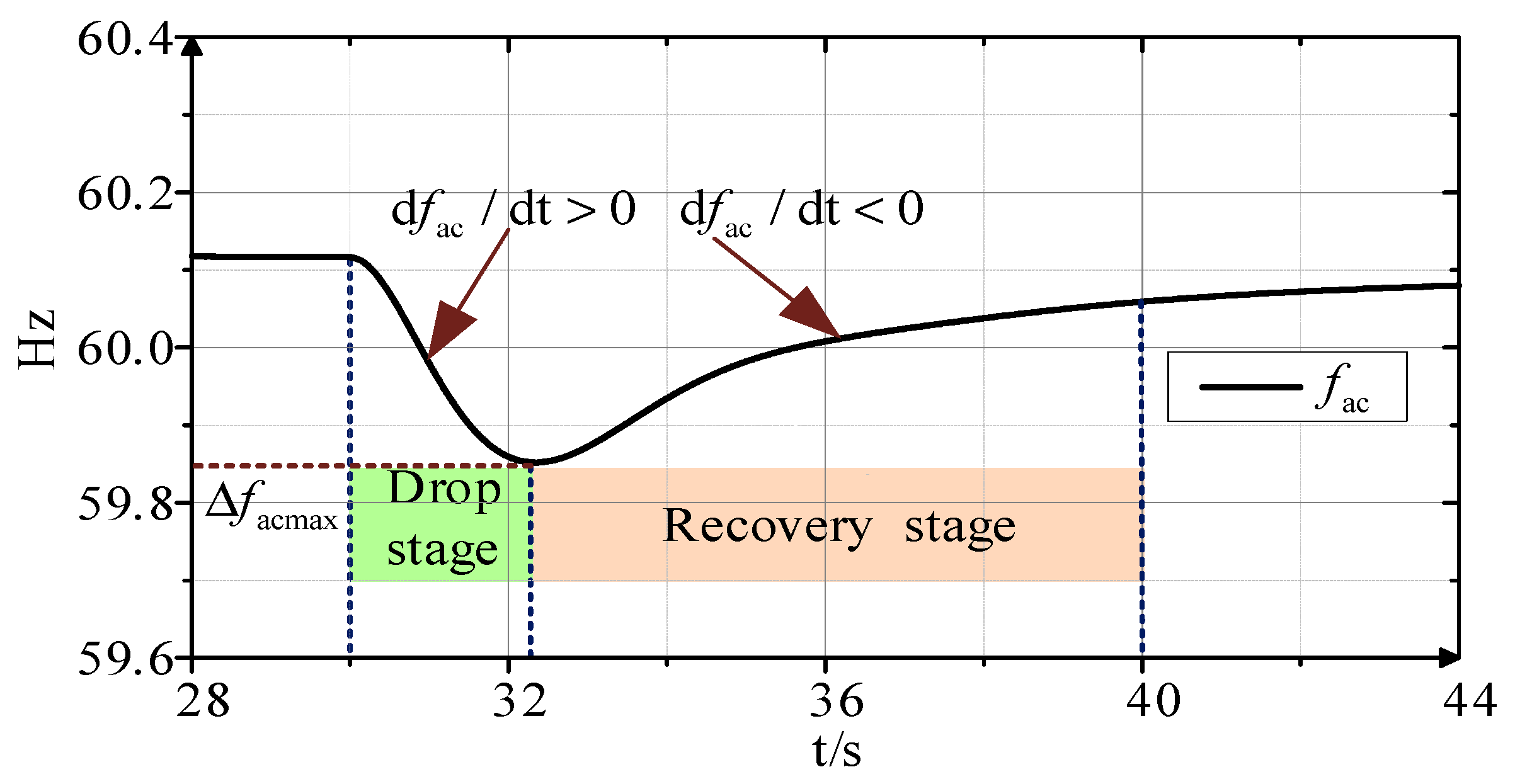
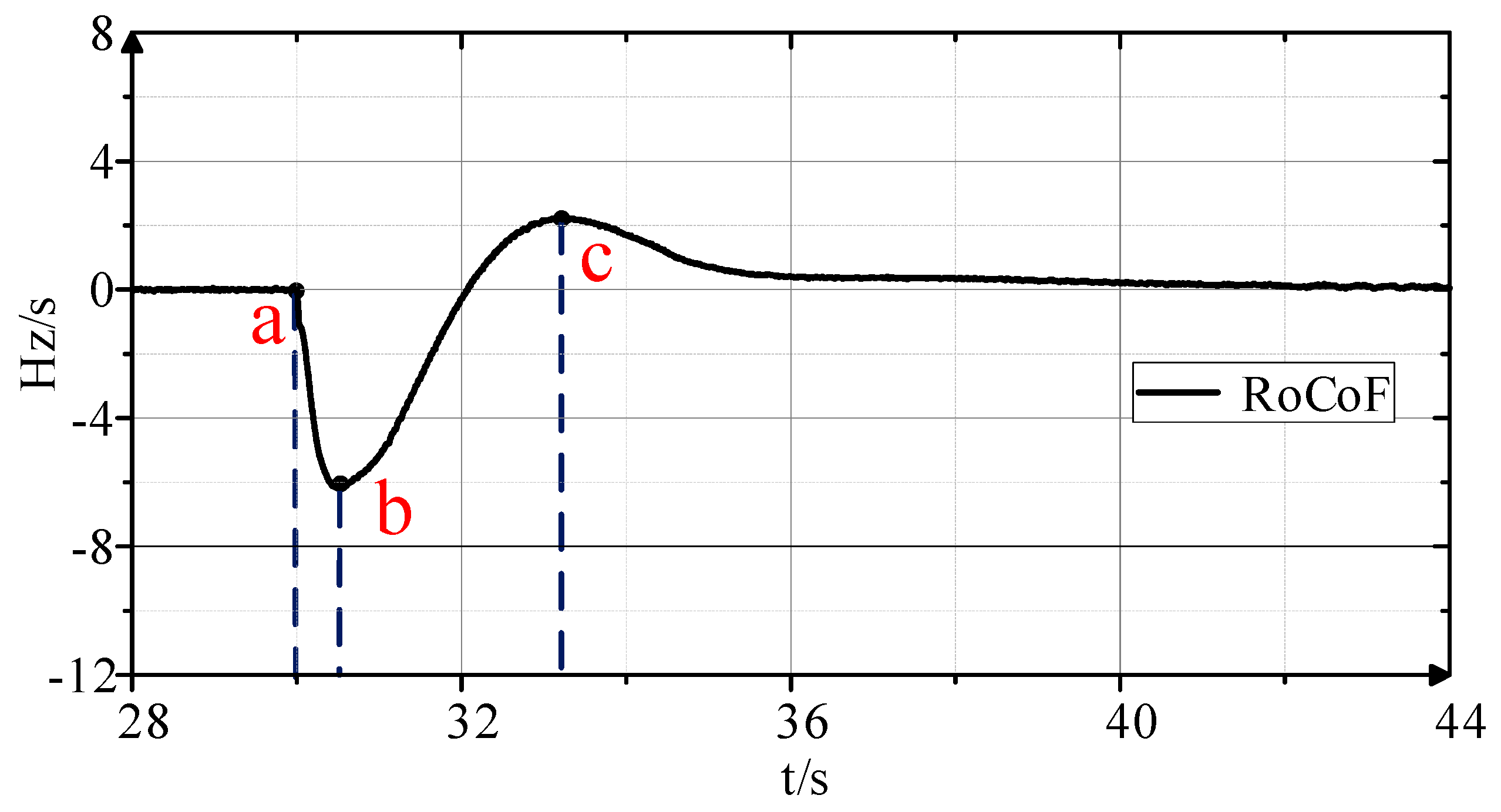
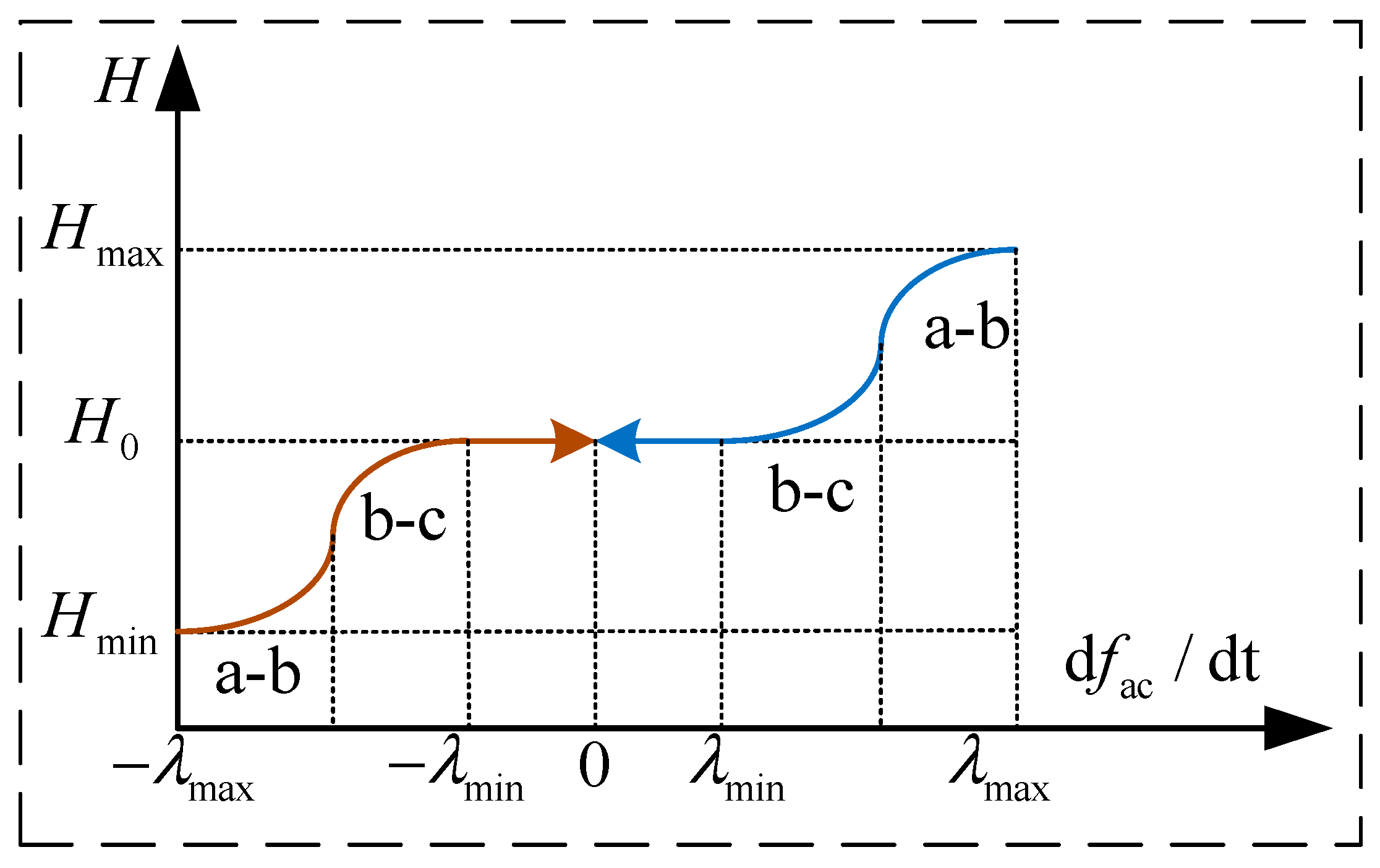
3.1. Analysis of the Frequency Recovery Requirement
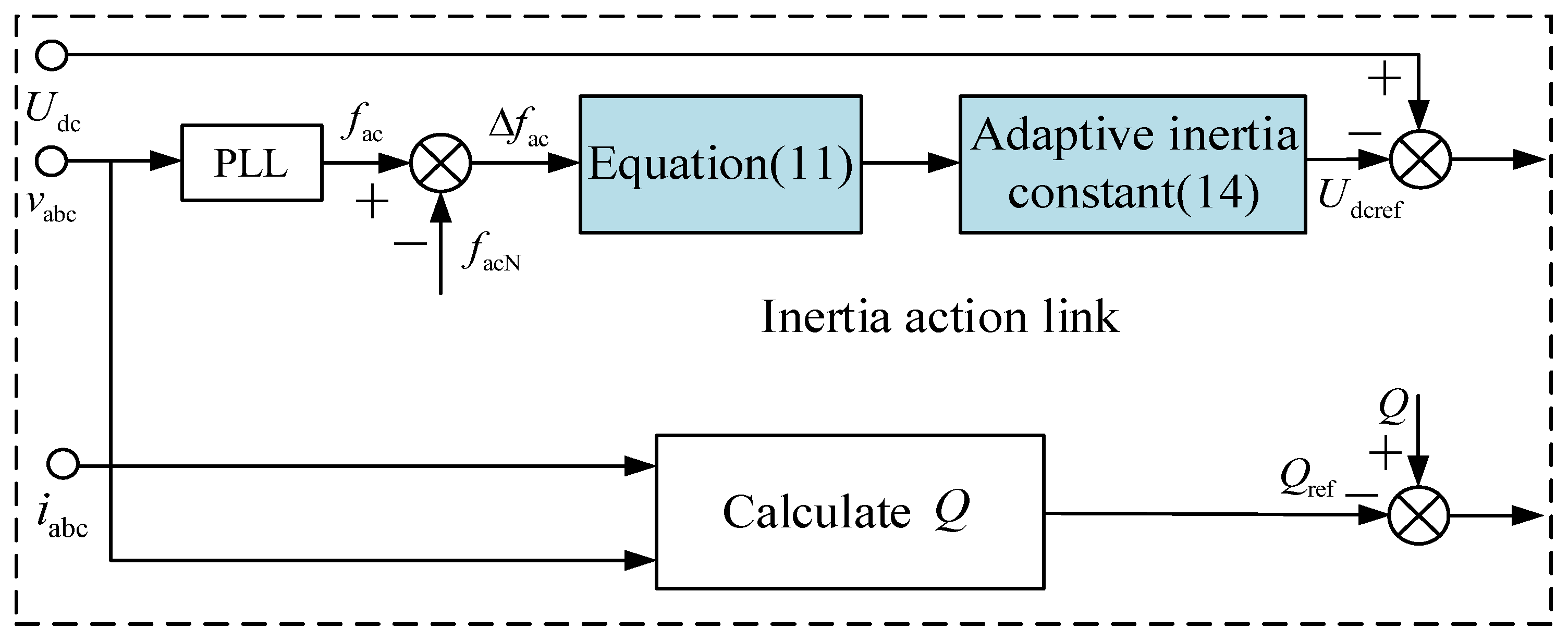
3.2. The Adaptive Active Inertia Control of MMC-HVDC
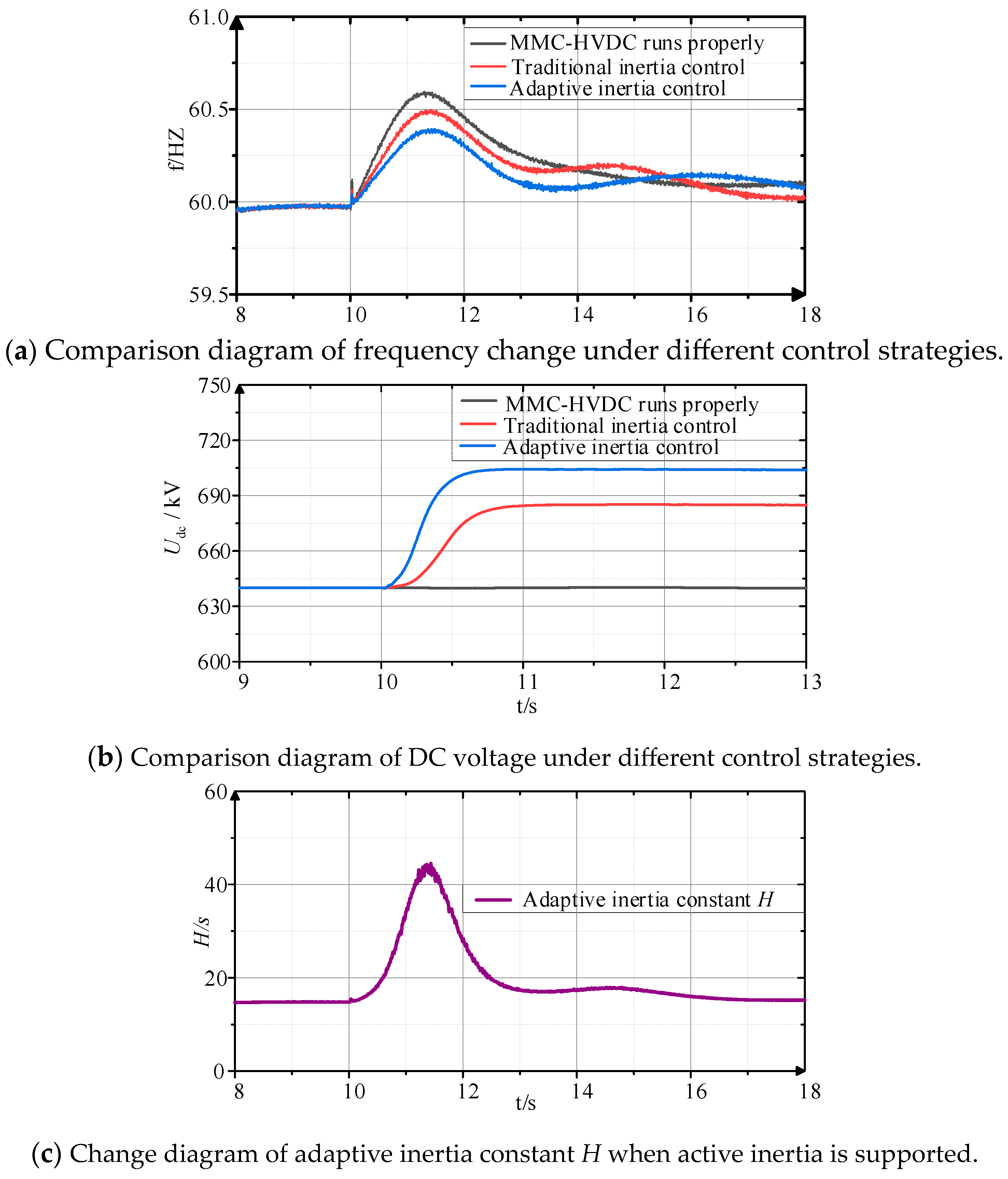
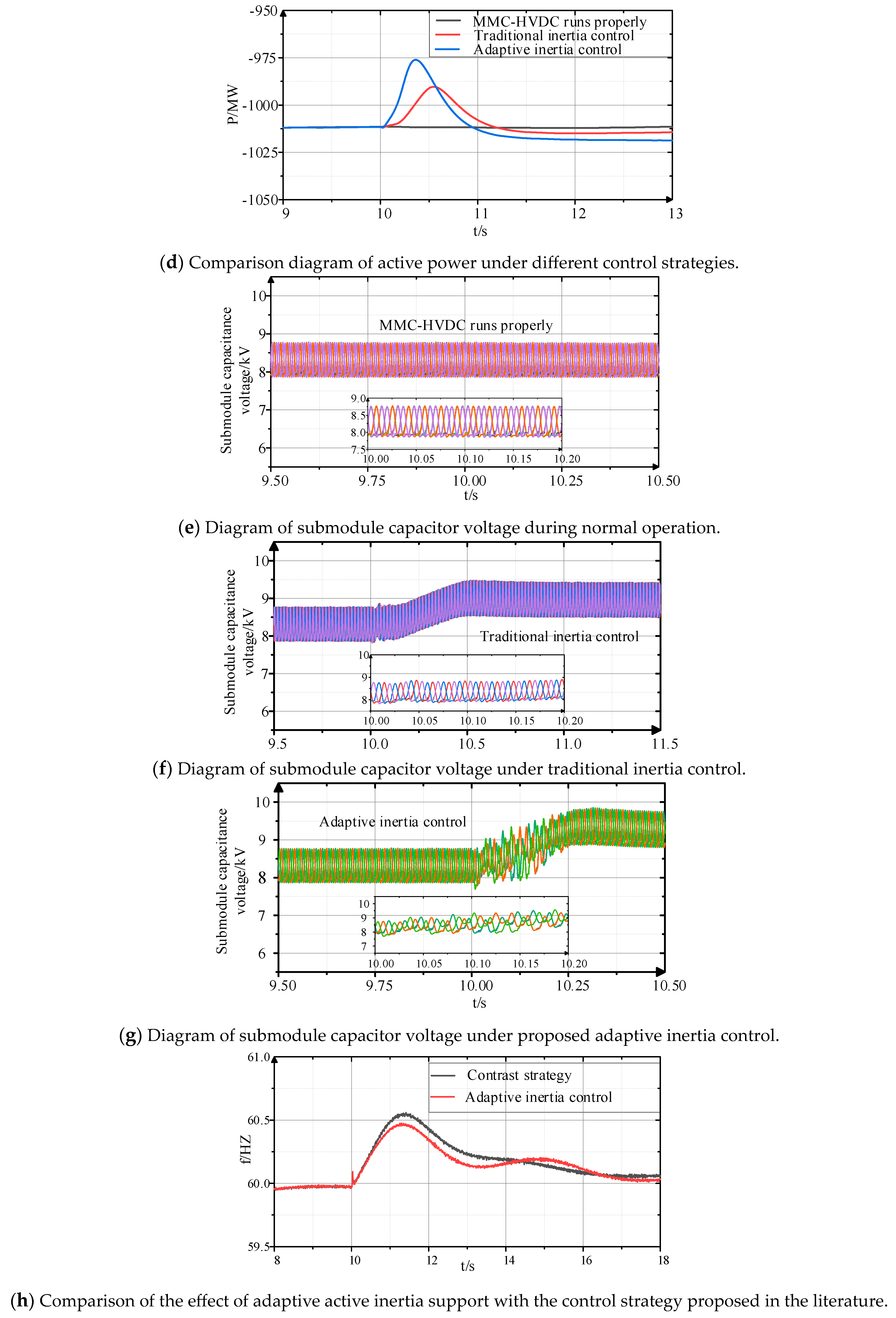
4. Simulation Analysis
- A.
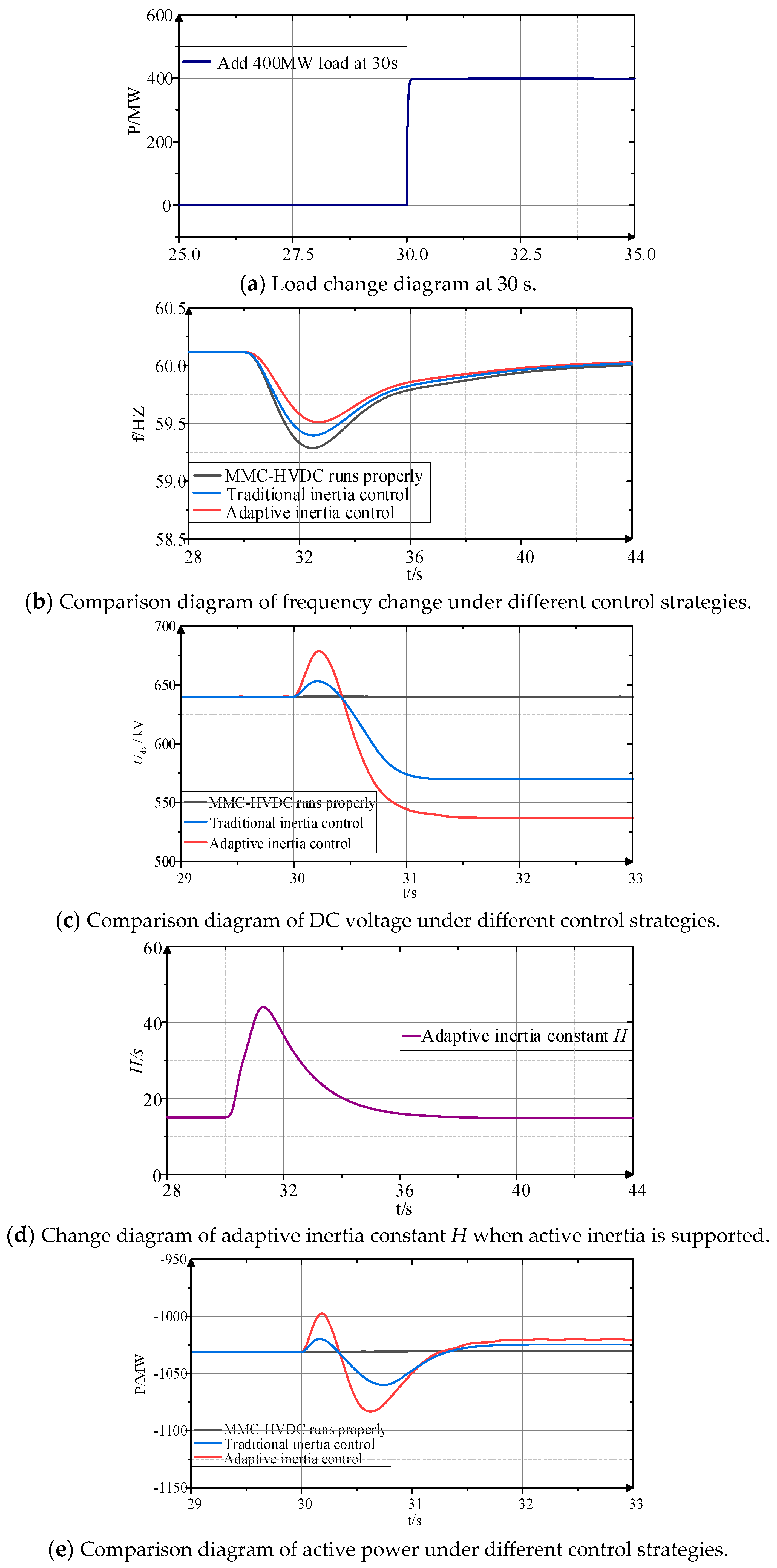
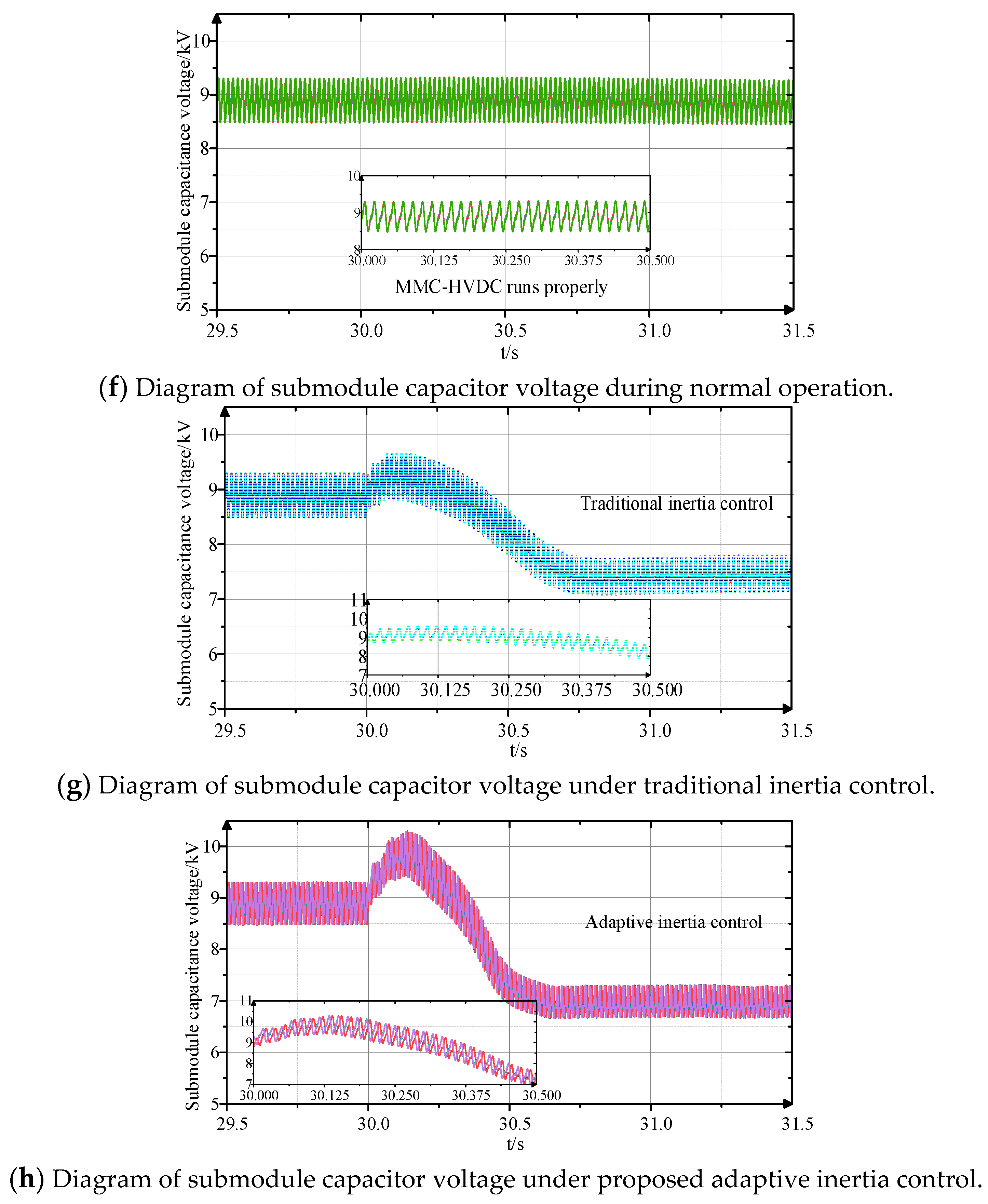
- Case 1
- B.
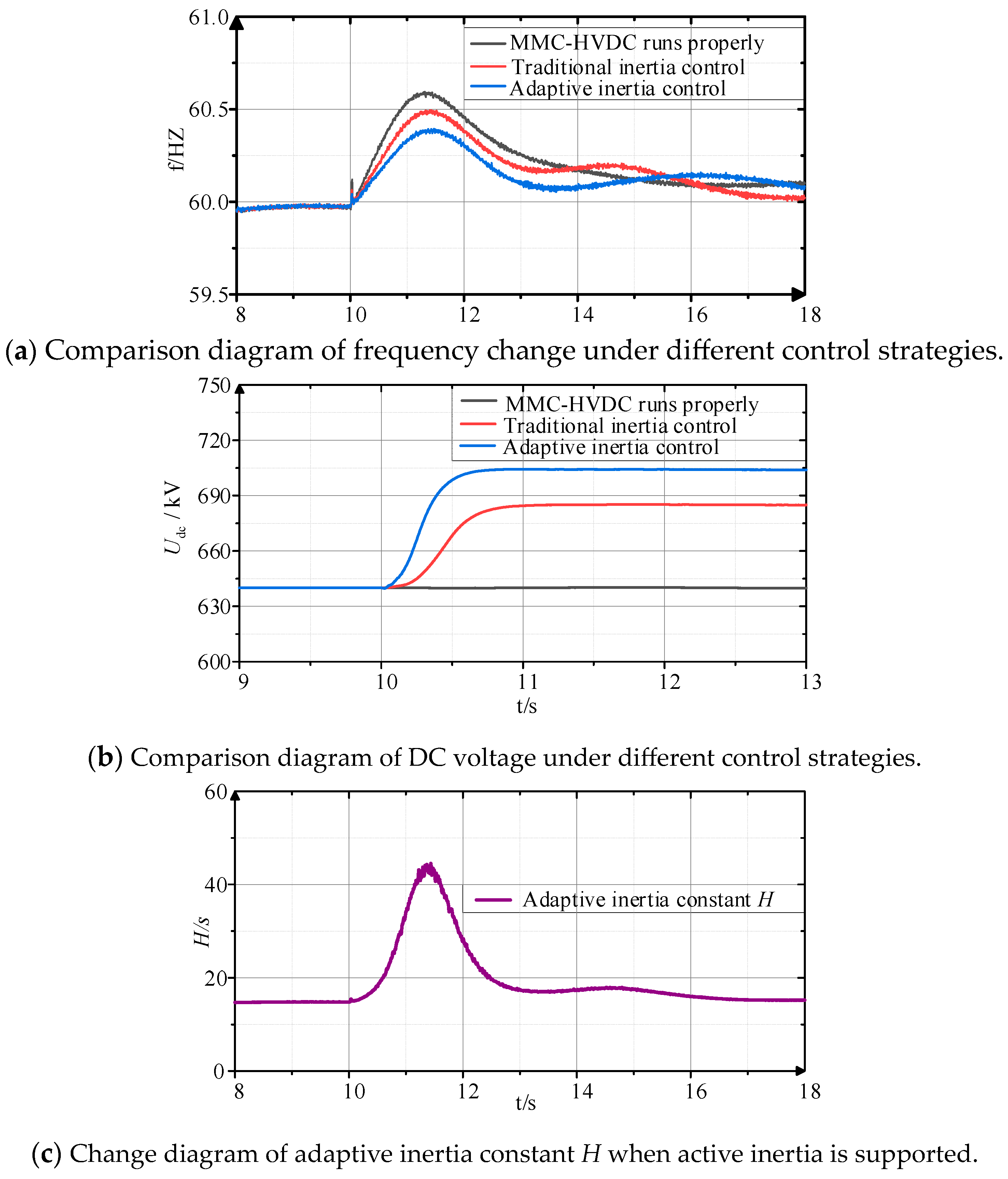
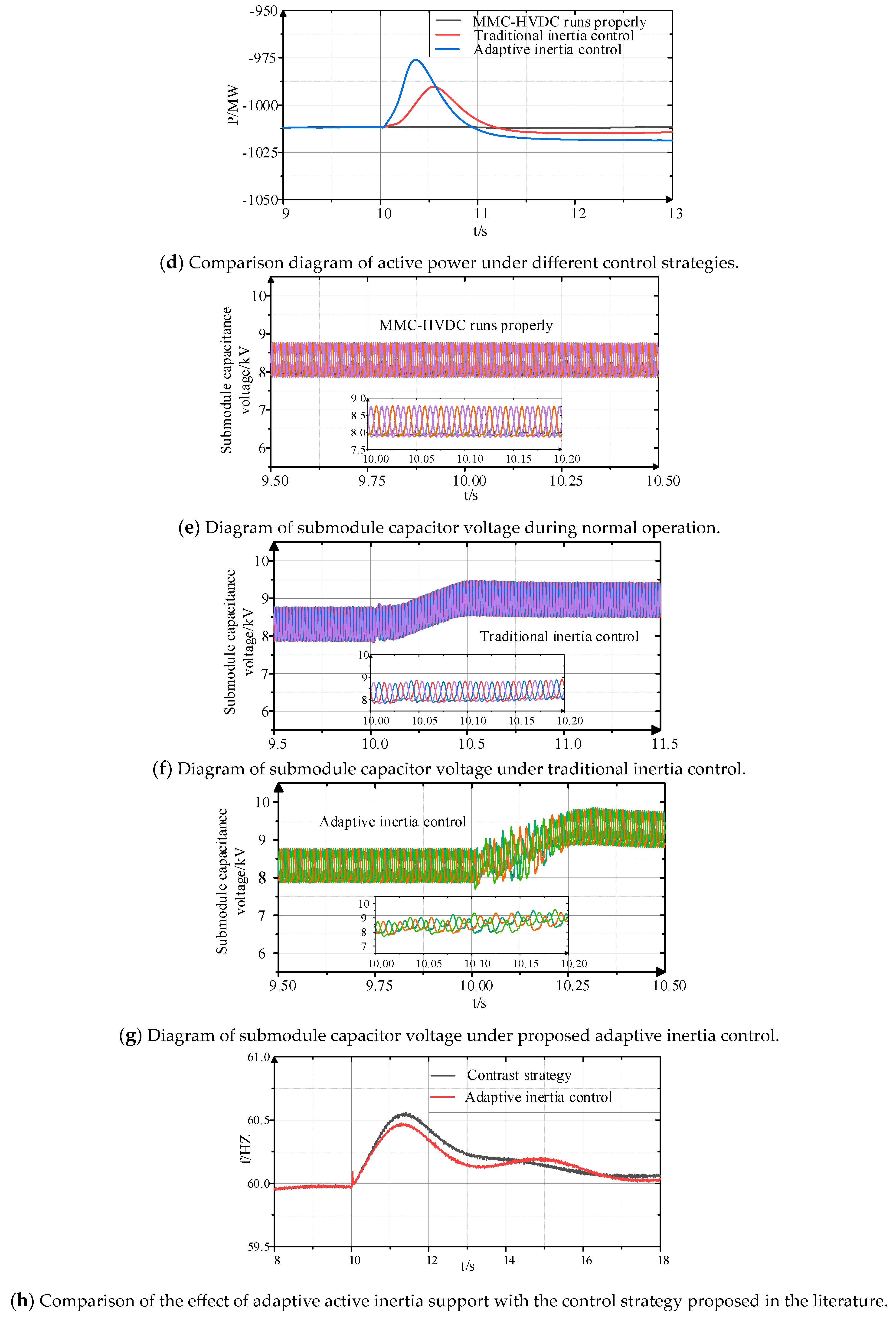
- Case 2
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Catalán, P.; Wang, Y.; Arza, J.; Chen, Z. A Comprehensive Overview of Power Converter Applied in High-Power Wind Turbine: Key Challenges and Potential Solutions. IEEE Trans. Power Electr. 2023, 38, 6169–6195. [Google Scholar] [CrossRef]
- Van Aarde, P.; Dalton, A.; Bekker, B. Balancing wind and solar power variability through spatial deployment informed by weather regimes: A review and roadmap ahead. In Proceedings of the 2022 30th Southern African Universities Power Engineering Conference (SAUPEC), Durban, South Africa, 25–27 January 2022; pp. 1–6. [Google Scholar]
- Debnath, S.; Chinthavali, M. Control of MMC-HVDC in low-inertia weak grids. In Proceedings of the 2017 IEEE 12th International Conference on Power Electronics and Drive Systems (PEDS), Honolulu, HI, USA, 12–15 December 2017; pp. 435–441. [Google Scholar]
- Liu, Z.; Lv, X.; Wu, F.; Li, Z. Multi-Mode Active Inertia Support Strategy for MMC-HVDC Systems Considering the Constraint of DC Voltage Fluctuations. IEEE Trans. Power Deliver. 2023, 38, 2767–2781. [Google Scholar] [CrossRef]
- Tu, L.; Yang, Y.; Yang, J.; Sun, T. The Synthetic Inertia Controller for MMC-HVDC Based Offshore Wind Farm Integration. In Proceedings of the 2021 IEEE 1st International Power Electronics and Application Symposium (PEAS), Shanghai, China, 13–15 November 2021; pp. 1–4. [Google Scholar]
- Roy, N.K.; Islam, S.; Podder, A.K.; Roy, T.K.; Muyeen, S.M. Virtual Inertia Support in Power Systems for High Penetration of Renewables—Overview of Categorization, Comparison, and Evaluation of Control Techniques. IEEE Access 2022, 10, 129190–129216. [Google Scholar] [CrossRef]
- Cui, F.; Zang, B. Adaptive Control Strategy for Moment of Inertia and Damping Coefficient of Virtual Synchronous Generator. In Proceedings of the 2022 4th International Conference on Power and Energy Technology (ICPET), Beijing, China, 28–31 July 2022; pp. 193–197. [Google Scholar]
- Wang, Z.; Yu, Y.; Gao, W.; Davari, M.; Deng, C. Adaptive, Optimal, Virtual Synchronous Generator Control of Three-Phase Grid-Connected Inverters Under Different Grid Conditions—An Adaptive Dynamic Programming Approach. IEEE Trans. Ind. Inform. 2022, 18, 7388–7399. [Google Scholar] [CrossRef]
- Fan, W.; Yan, X.; Hua, T. Adaptive parameter control strategy of VSG for improving system transient stability. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 3–7 June 2017; pp. 2053–2058. [Google Scholar]
- Li, J.; Wen, B.; Wang, H. Adaptive Virtual Inertia Control Strategy of VSG for Micro-Grid Based on Improved Bang-Bang Control Strategy. IEEE Access 2019, 7, 39509–39514. [Google Scholar] [CrossRef]
- Xie, Y.; Xie, Z.; Chang, Y.; Zhang, L. Virtual Inertia Adaptive Control Strategy for DFIG Wind Turbines Based on the Improved Bang-Bang Control. In Proceedings of the 2020 IEEE 9th International Power Electronics and Motion Control Conference (IPEMC2020—ECCE Asia), Nanjing, China, 29 November–2 December 2020; pp. 1935–1940. [Google Scholar]
- Zhai, B.; Wei, W.; Shi, Y.; Chen, G.; Sun, R.; Gao, B. Adaptive virtual inertia control-based frequency support method for photovoltaic penetrated power system. In Proceedings of the 2021 IEEE Sustainable Power and Energy Conference (iSPEC), Nanjing, China, 23–25 December 2021; pp. 157–162. [Google Scholar]
- Wang, Q.; Zhou, D.; Yin, S.; Lei, Y.; He, T. Improved Adaptive Inertia and Damping Coefficient Control Strategy of VSG Based on Optimal Damping Ratio. In Proceedings of the 2022 International Power Electronics Conference (IPEC-Himeji 2022—ECCE Asia), Himeji, Japan, 15–19 May 2022; pp. 102–107. [Google Scholar]
- Saxena, A.; Shankar, R.; Al Zaabi, O.; Al Hosani, K.; Muduli, U.R. Fuzzy Rule-based Adaptive Virtual Inertia Control for Enhancing Multi-Region Micro-grid Dynamic Response. In Proceedings of the 2023 IEEE IAS Global Conference on Renewable Energy and Hydrogen Technologies (GlobConHT), Male, Maldives, 11–12 March 2023; pp. 1–6. [Google Scholar]
- Guo, C.; Xu, L.; Yang, S.; Jiang, W. A Supplementary Damping Control for MMC-HVDC System to Mitigate the Low-Frequency Oscillation Under Low Inertia Condition. IEEE Trans. Power Deliver. 2023, 38, 287–298. [Google Scholar] [CrossRef]
- Song, J.; Gao, X.; Sun, H.; Guo, W. Improved Virtual Inertia Damping Adaptive VDG Control Strategy for DC Microgrid Hybrid Energy Storage Converter. In Proceedings of the 2022 4th International Conference on Electrical Engineering and Control Technologies (CEECT), Shanghai, China, 16–18 December 2022; pp. 1188–1192. [Google Scholar]
- Zhang, Y.; Sun, Q.; Zhou, J.; Guerrero, J.M.; Wang, R.; Lashab, A. Optimal Frequency Control for Virtual Synchronous Generator Based AC Microgrids via Adaptive Dynamic Programming. IEEE Trans. Smart Grid 2023, 14, 4–16. [Google Scholar] [CrossRef]
- Mengxue, D.; Zhisong, L.; Wei, X.; Xiaoyu, Z.; Jianyu, L. Research on Adaptive Control of Virtual Synchronous Generator. In Proceedings of the 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chongqing, China, 12–14 June 2020; pp. 1169–1174. [Google Scholar]
- Tan, X.; Ren, L.; Tang, Y.; Li, J.; Shi, J.; Xu, Y.; Sheng, C.; Xiao, L. Comparative Analysis of Three Types of SFCL Considering Current-Limiting Requirement of MMC-HVDC System. IEEE Trans. Appl. Supercon. 2021, 31, 1–5. [Google Scholar] [CrossRef]
- Chen, S.; Zhang, X.; Wu, Y.; Zhu, Q.; Bao, C.; Zhan, X. Segmented Adaptive Control of Virtual Inertia for Virtual Synchronous Machines. In Proceedings of the 2022 7th International Conference on Power and Renewable Energy (ICPRE), Shanghai, China, 23–26 September 2022; pp. 176–181. [Google Scholar]
- AziziAghdam, S.; Agamy, M. Small Signal Stability Analysis of Dispatchable Virtual Oscillator Controlled Inverters with Adaptive Virtual Inertia Control. In Proceedings of the 2023 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Washington, DC, USA, 16–19 January 2023; pp. 1–5. [Google Scholar]
- Liang, J.; Chen, L.; Li, T.; Feng, H.; Zeng, S.; Li, X. VSG Integrated Control Strategy Based on Hamilton Theory. In Proceedings of the 2021 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Chengdu, China, 18–21 July 2021; pp. 885–891. [Google Scholar]
- Kang, Z.; Zhao, B.; Zhao, Z.; Zhang, Z.; Wang, S.; Yu, H. In Proceedings of the Passivity-Based Control Strategy of MMC-HVDC with Wind Farm Based on ESO and TSMC. In Proceedings of the 16th IET International Conference on AC and DC Power Transmission (ACDC 2020), Virtual, 2–3 July 2020; pp. 19–25. [Google Scholar]
- Bin, L.; Zhang, W. Virtual inertia control and voltage support in MMC-based DC systems. In Proceedings of the 2017 China International Electrical and Energy Conference (CIEEC), Beijing, China, 25–27 October 2017; pp. 436–440. [Google Scholar]
- Zeng, W.; Li, R.; Huang, L.; Liu, C.; Cai, X. Approach to Inertial Compensation of HVDC Offshore Wind Farms by MMC With Ultracapacitor Energy Storage Integration. IEEE Trans. Ind. Electron. 2022, 69, 12988–12998. [Google Scholar] [CrossRef]
- Liu, Z.; Wang, Y.; Lai, J.; Zheng, A. Markov-Based Stochastic Stabilization Control for MMC-HVDC Systems with Inertia Supporting Under Random Disturbances. IEEE Trans. Power Syst. 2023, 1–12. [Google Scholar] [CrossRef]
- Li, G.; Gao, J.; Liu, X.; Li, W.; Li, Z.; Qi, W.; Yu, H. A Frequency Prevention and Control Method of MMC-HVDC Connected to Passive Power Grid Considering DC Capacitor Energy Buffer. In Proceedings of the 2021 IEEE Sustainable Power and Energy Conference (iSPEC), Nanjing, China, 23–25 December 2021; pp. 2929–2934. [Google Scholar]
- Chu, J.; Lv, Y.; Xu, Y.; Du, G.; Sun, D.; Yu, P. Coordinated Control Strategy for Improving Frequency Stability of Offshore Wind Farms Connected to the Grid through MMC–HVDC Transmission. In Proceedings of the 2022 4th Asia Energy and Electrical Engineering Symposium (AEEES), Chengdu, China, 25–28 March 2022; pp. 354–360. [Google Scholar]
- Yang, R.; Shi, G.; Zhang, C.; Li, G.; Cai, X. Internal Energy Based Grid-Forming Control for MMC-HVDC Systems With Wind Farm Integration. IEEE Trans. Ind. Appl. 2023, 59, 503–512. [Google Scholar] [CrossRef]
- Hirsching, C.; Goertz, M.; Wenig, S.; Bisseling, A.; Suriyah, M.; Leibfried, T. On Fault-Ride-Through Performance in MMC-HVDC Applications Controlled as a Virtual Synchronous Machine. IEEE Trans. Energy Conver. 2022, 37, 2803–2812. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value |
|---|---|
| DC voltage/kV | 640 |
| Rated capacity/MW | 1200 |
| Arm submodules number | 76 |
| Submodule capacity/μF | 2800 |
| AC frequency/Hz | 60 |
| Normal active inertia threshold | 15 |
| Active inertia adaptive threshold and | 0.2, 0.8 |
| Adaptive control adjustment coefficients , , , | −0.02, −1, 20, 15 |
| Parameter | Numerical Value |
|---|---|
| DC voltage/kV | 640 |
| Rated capacity/MW | 1200 |
| Arm submodules number | 76 |
| Submodule capacity/μF | 2800 |
| AC frequency/Hz | 60 |
| Normal active inertia threshold | 15 |
| Active inertia adaptive threshold threshold and | 0.35, 0.95 |
| Adaptive control adjustment coefficients , , , | −0.02,−1.5,20,15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, X.; Wang, J.; Zhang, Z.; Liu, Z.; Li, Z. Adaptive Active Inertia Control Strategy of MMC-HVDC Systems for Flexible Frequency Support. Electronics 2023, 12, 4288. https://doi.org/10.3390/electronics12204288
Lv X, Wang J, Zhang Z, Liu Z, Li Z. Adaptive Active Inertia Control Strategy of MMC-HVDC Systems for Flexible Frequency Support. Electronics. 2023; 12(20):4288. https://doi.org/10.3390/electronics12204288
Chicago/Turabian StyleLv, Xiaojv, Jialong Wang, Zhichao Zhang, Ziwen Liu, and Zhaoxia Li. 2023. "Adaptive Active Inertia Control Strategy of MMC-HVDC Systems for Flexible Frequency Support" Electronics 12, no. 20: 4288. https://doi.org/10.3390/electronics12204288
APA StyleLv, X., Wang, J., Zhang, Z., Liu, Z., & Li, Z. (2023). Adaptive Active Inertia Control Strategy of MMC-HVDC Systems for Flexible Frequency Support. Electronics, 12(20), 4288. https://doi.org/10.3390/electronics12204288