
A Scalable Spatial–Temporal Correlated Non-Stationary Channel Fading Generation Method


 , ,
, , 
Abstract
:1. Introduction
- (1)
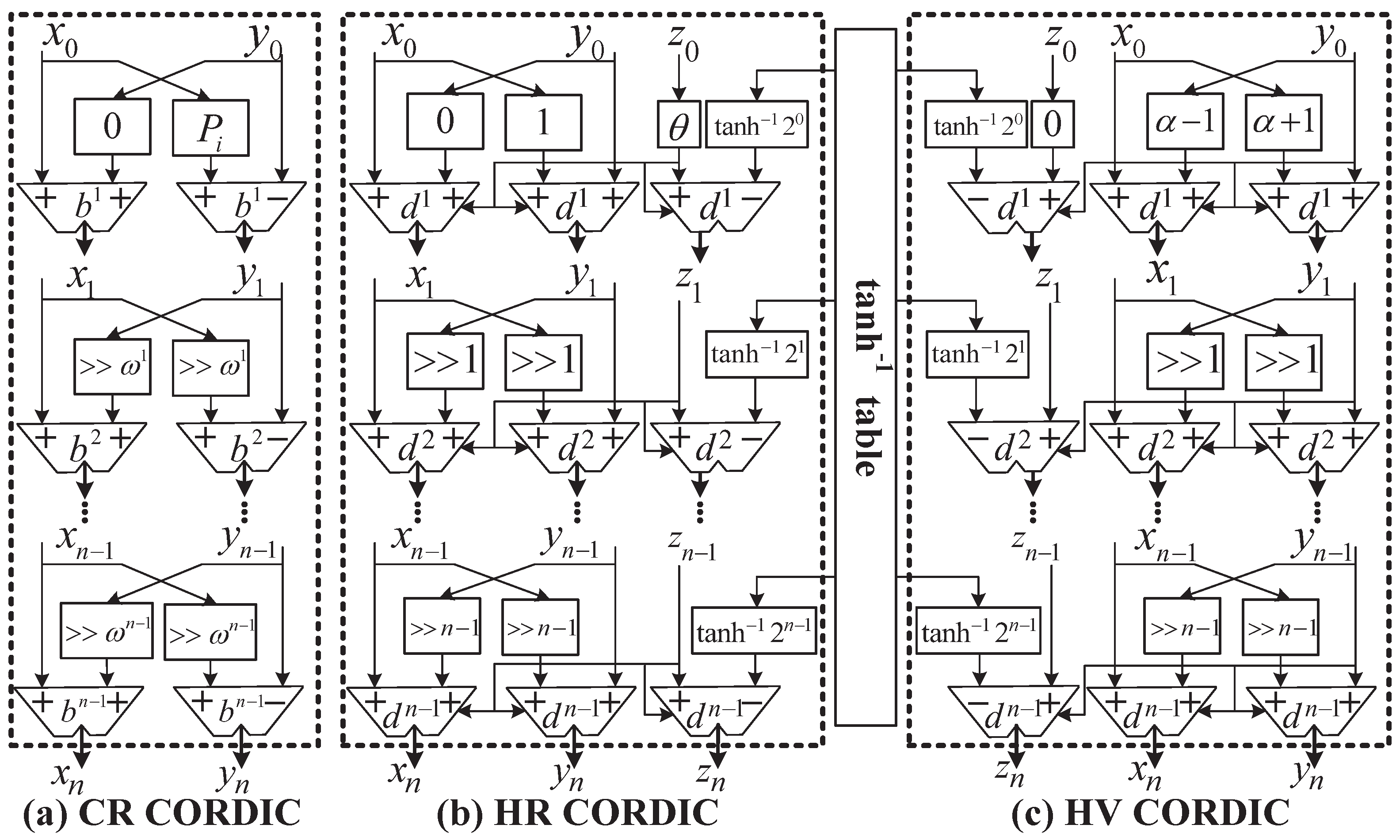
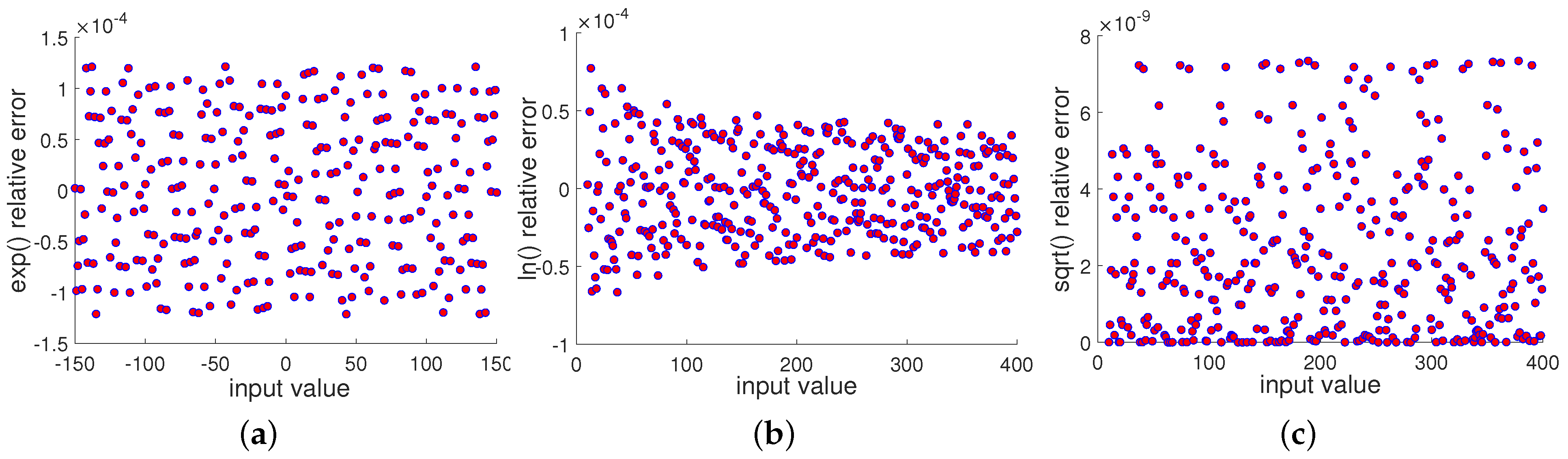
- We design and implement a scalable hardware architecture to enhance flexibility and applicability. Based on the improved CORDIC algorithm, the convergence domains of e-exponent, logarithm, and square root functions are expanded to achieve temporally correlated fading in different scenarios. Furthermore, we adopt the SoFM method to ensure the continuity of the Doppler phase in non-stationary scenarios.
- (2)
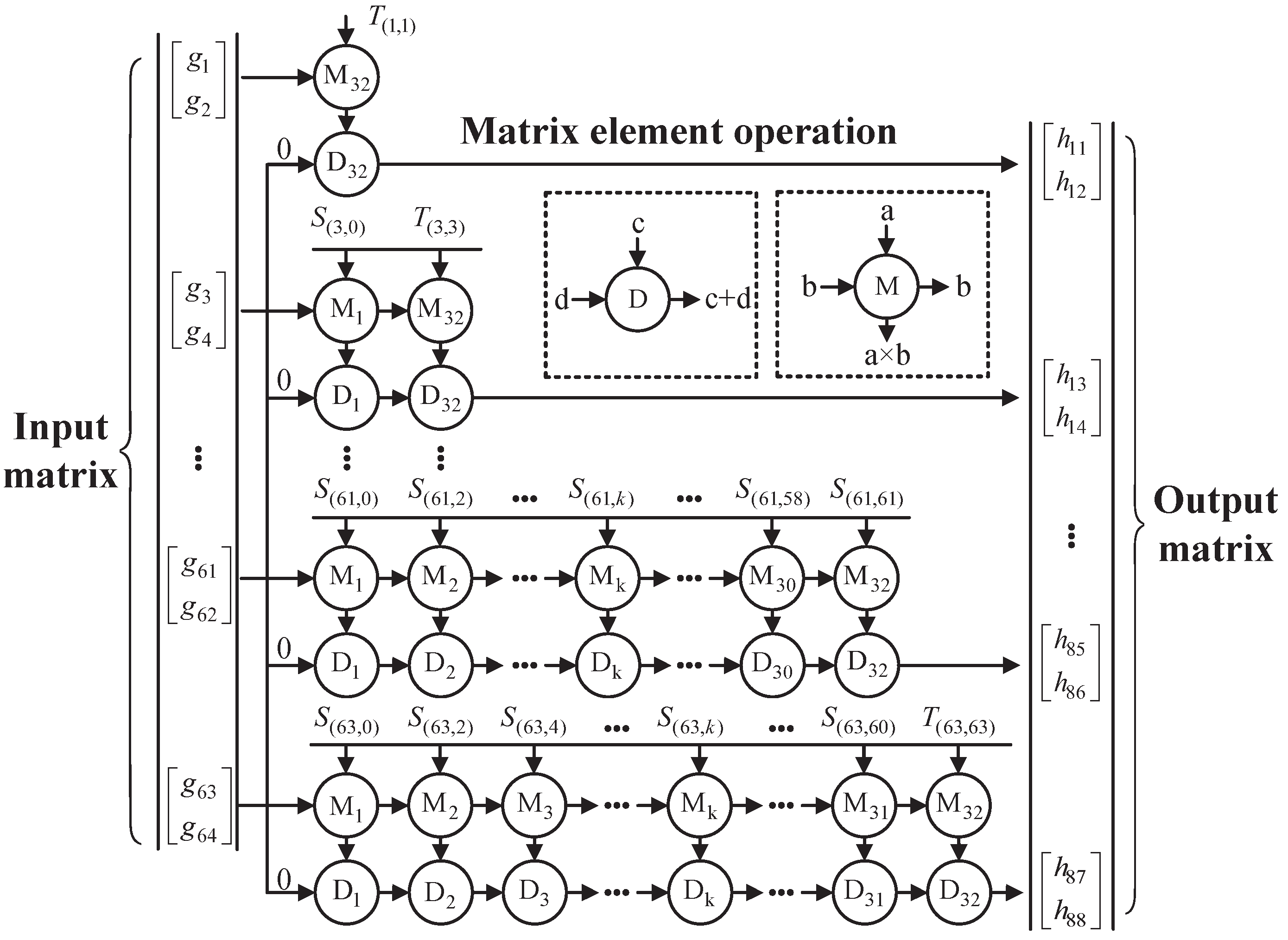
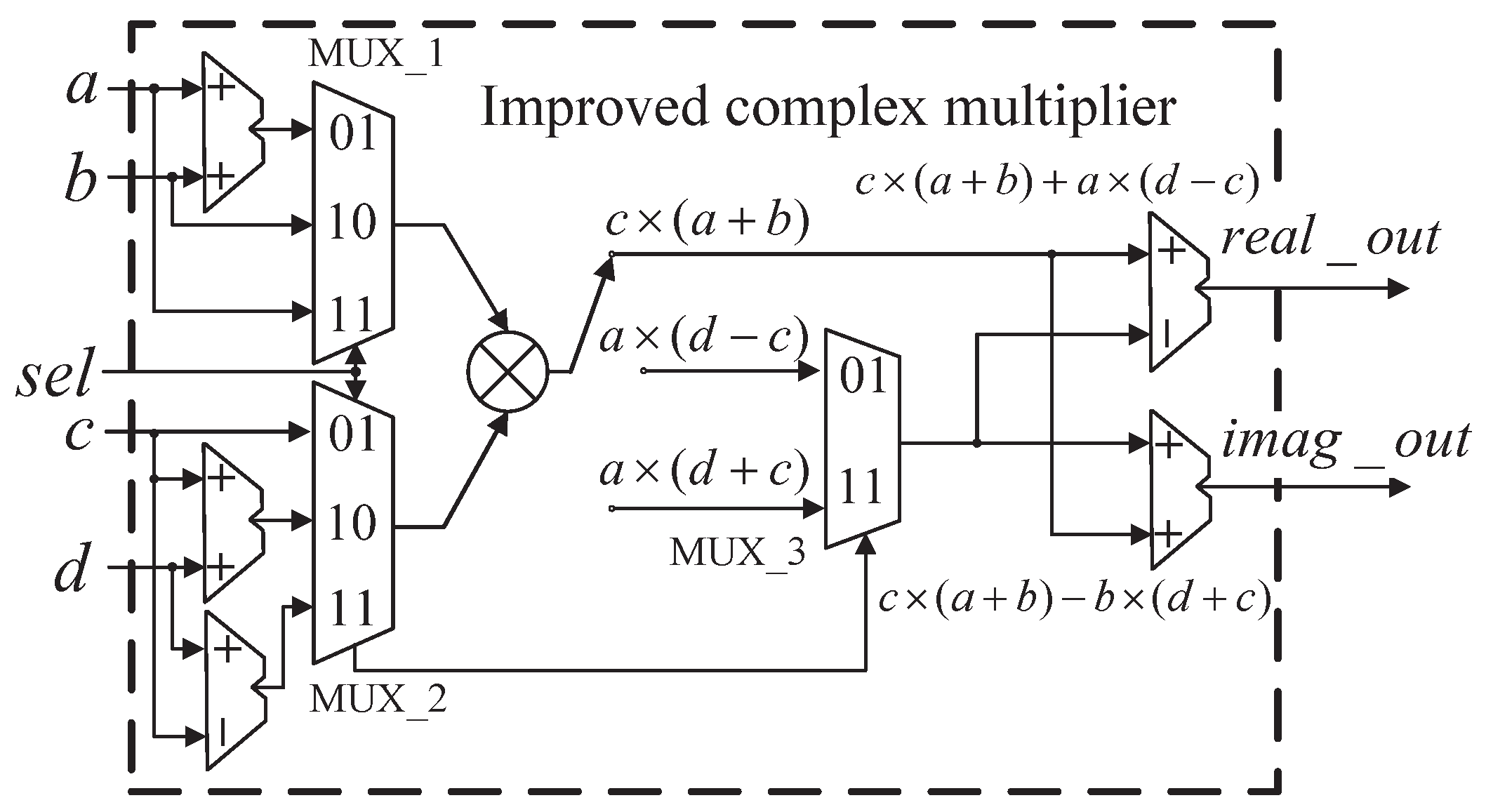
- A lower triangular matrix operation method is proposed, which decomposes its large-scale matrix into low-level matrix operations. This is based on matrix partitioning and time-division multiplexing, which greatly reduces the complexity of hardware implementation for spatially correlated fading. In addition, a selector-based optimization scheme is adopted for complex multiplication, which effectively reduces hardware resource consumption.
- (3)
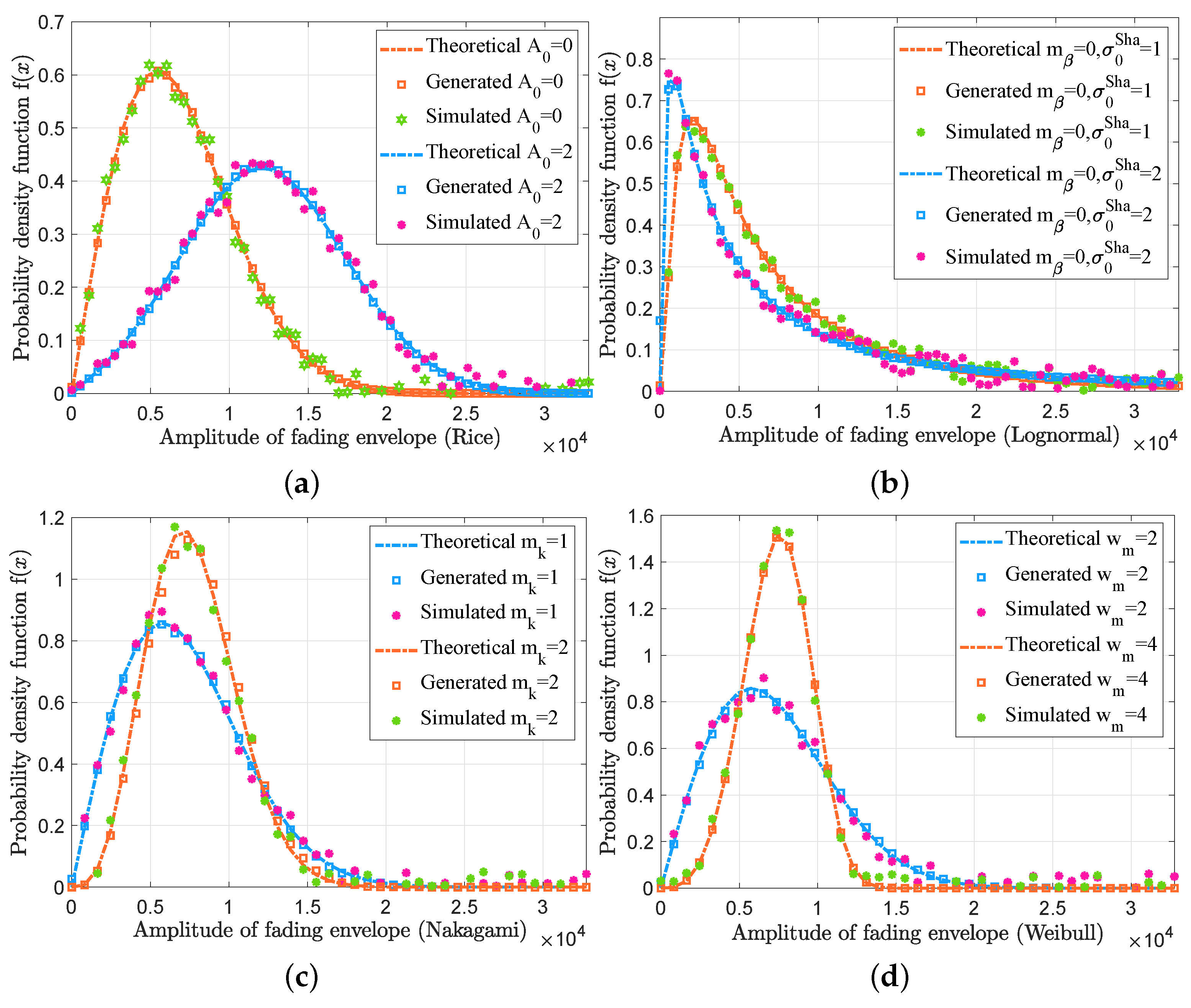
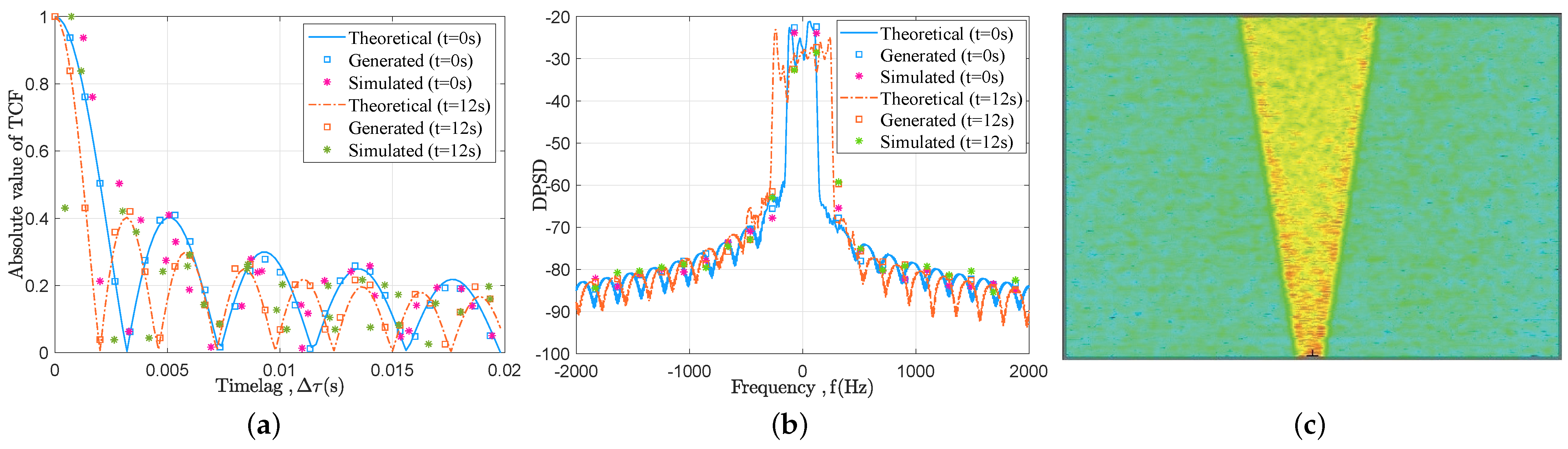
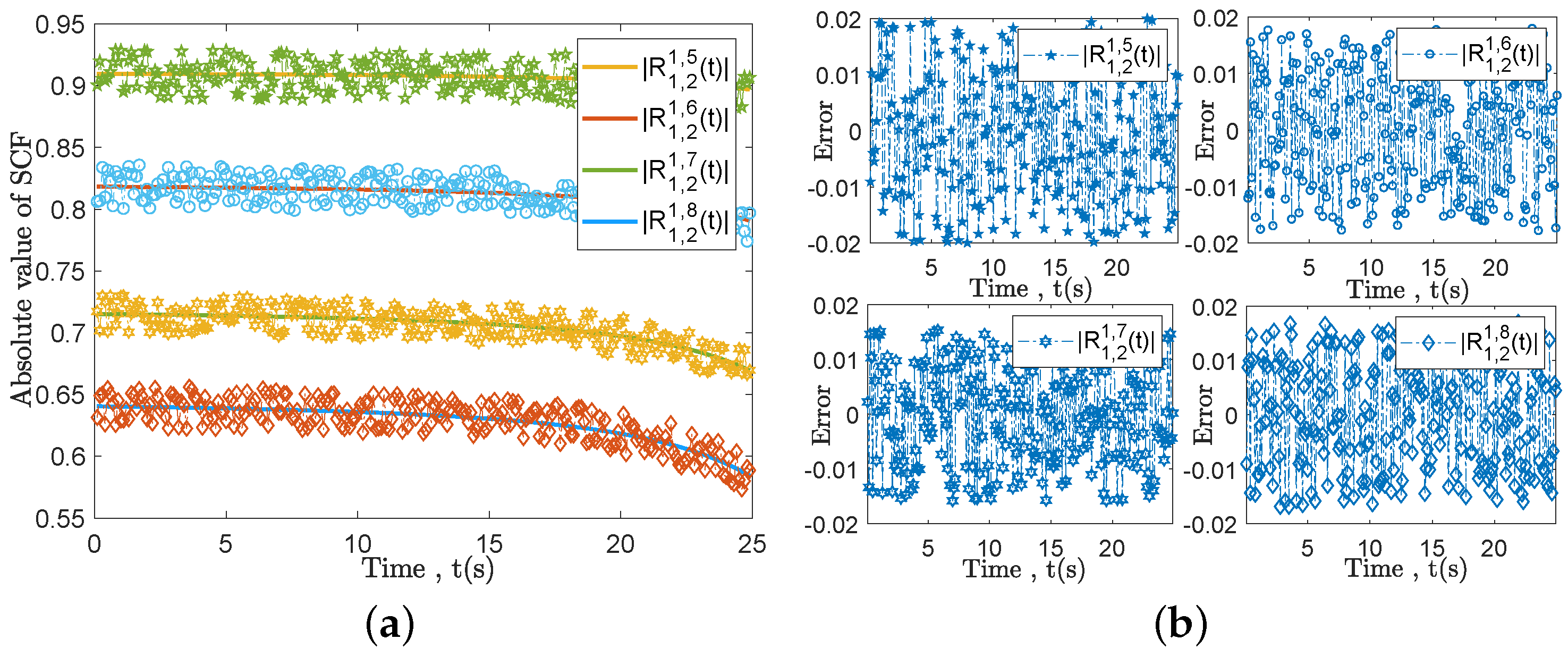
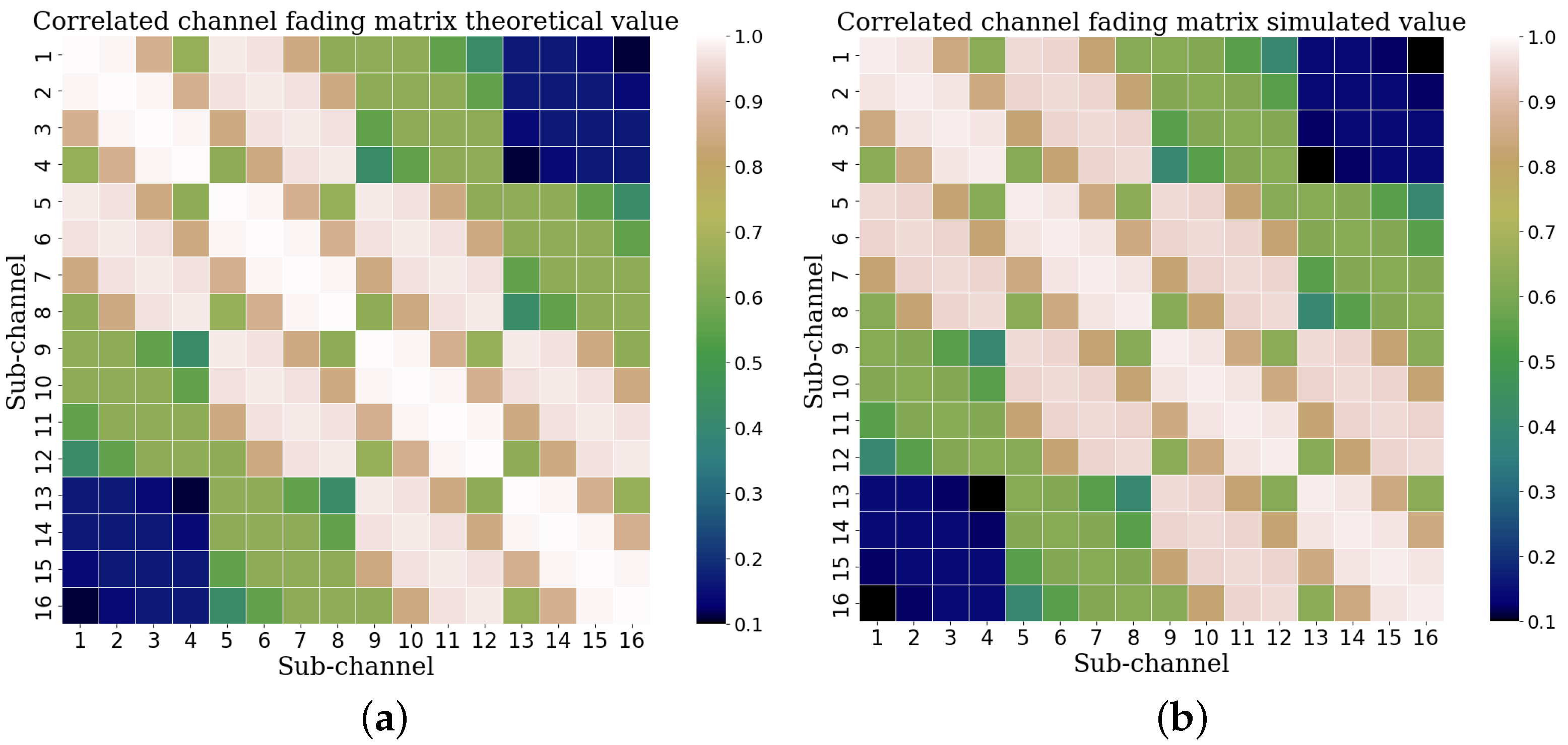
- The proposed hardware generation method is implemented on the XC7VX690T FPGA chip. The hardware simulation results demonstrate that the statistical properties, such as the probability density function (PDF), Doppler power spectrum density (DPSD), temporal correlation function (TCF), and spatial correlation function (SCF), are in good agreement with their theoretical values. Specifically, the generated PDF error with a 16-bit fixed-point is 1.52%, and the average SCF error is 1.47%. In addition, resource utilization is reduced from 9.08% to 3.54%; DSP resources are especially reduced, with a reduction of 11.11%.
2. Correlated Channel Fading Model
3. Scalable and Real-Time Hardware Generation Method
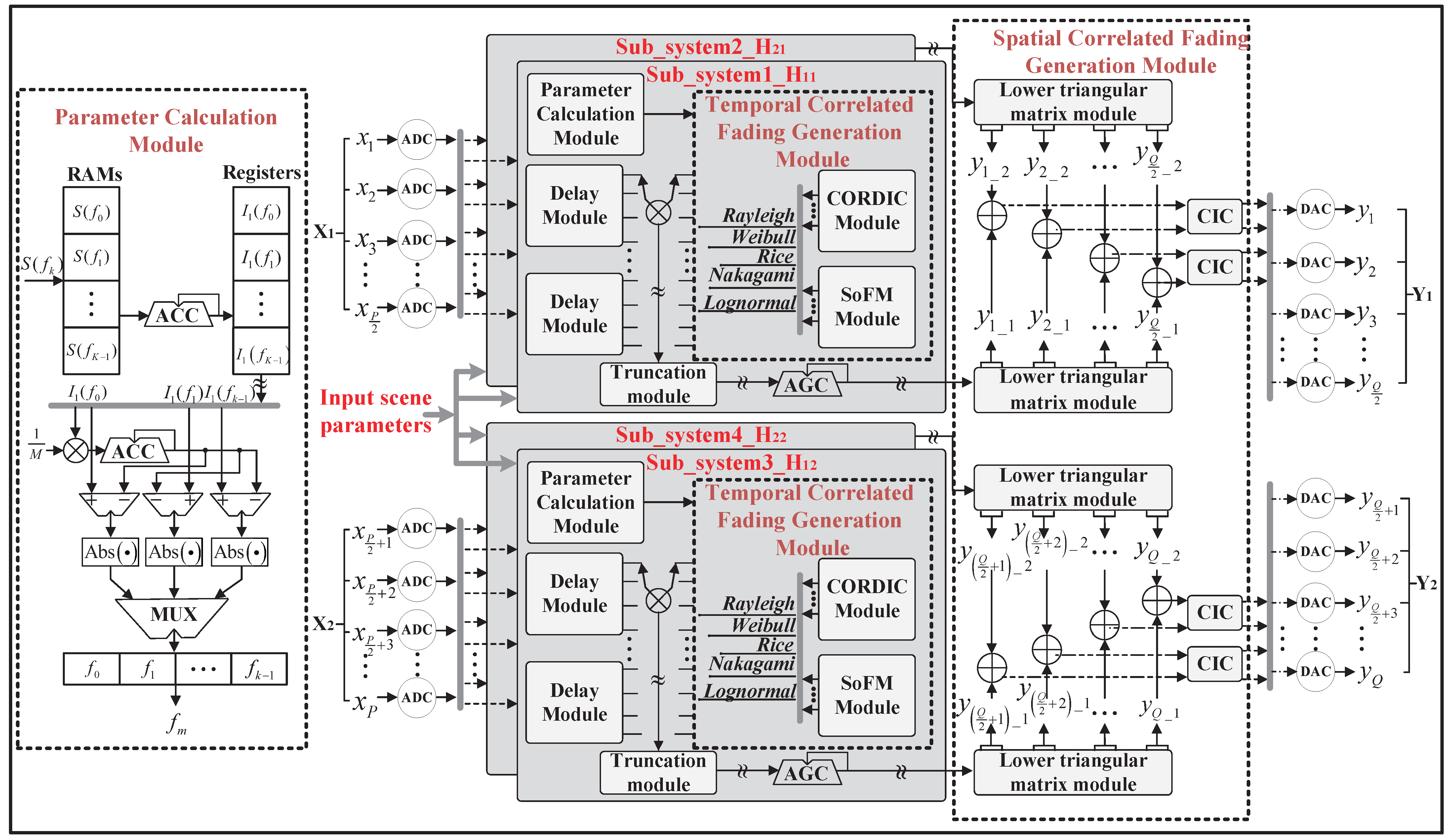
3.1. Overview of Hardware Generation Structure
3.2. Temporal Correlated Fading Generation Based on Modified CORDIC Method
3.3. Spatial Correlated Fading Generation Based on Efficient Matrix Operation
4. Measurement Results and Analysis
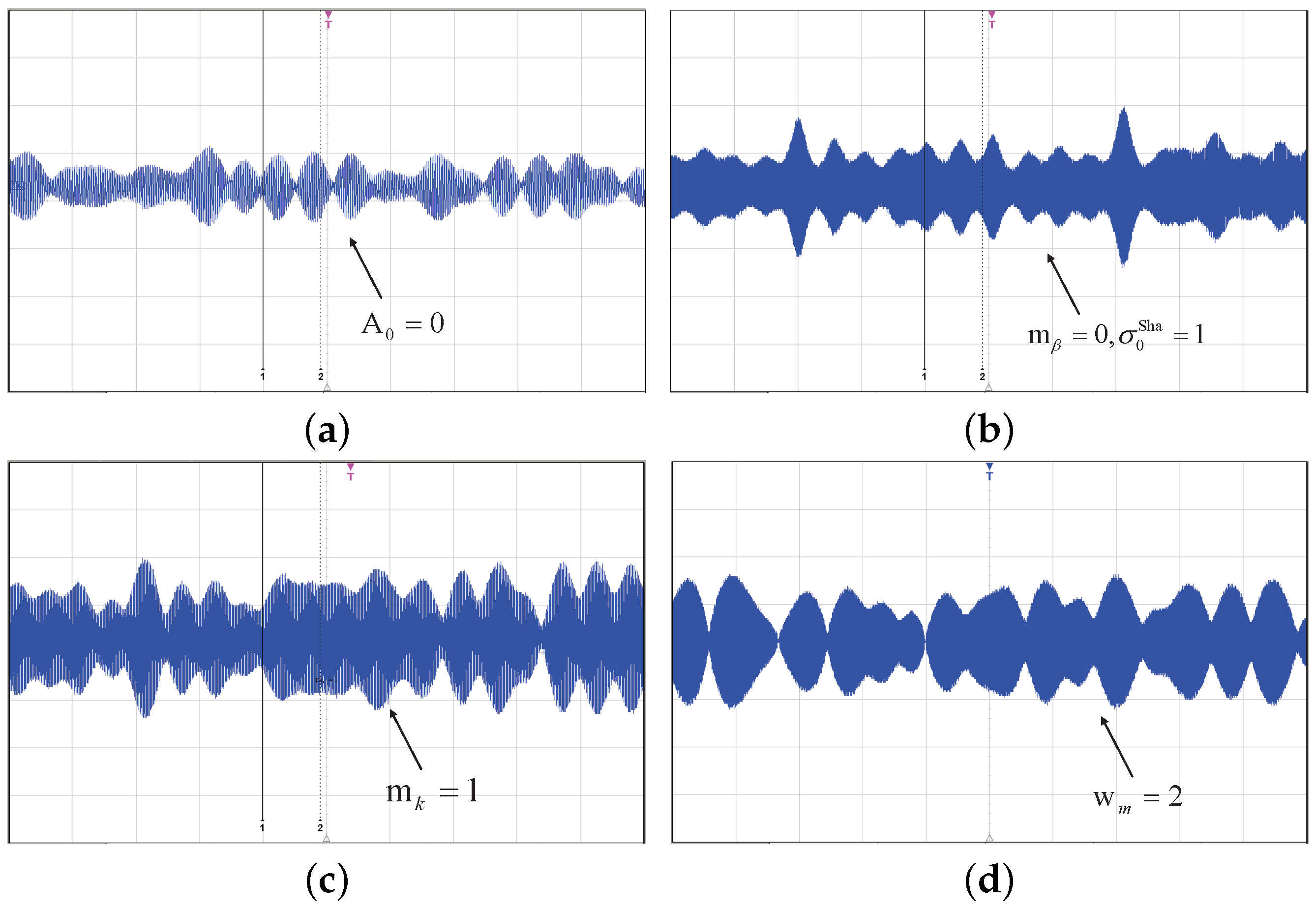
4.1. Statistical Properties of Generated Fading
4.2. Hardware Resource Consumption
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhu, Q.M.; Li, H.; Fu, Y.; Wang, C.X.; Tan, Y.; Chen, X.M.; Wu, Q.H. A novel 3D non-stationary wireless MIMO channel simulator and hardware emulator. IEEE Trans. Commun. 2018, 66, 3865–3878. [Google Scholar] [CrossRef]
- Zhu, Q.M.; Mao, K.; Song, M.Z.; Chen, X.M.; Hua, B.Y.; Zhong, W.Z.; Ye, X.J. Map-Based Channel Modeling and Generation for U2V mmWave Communication. IEEE Trans. Veh. Technol. 2022, 71, 8004–8015. [Google Scholar] [CrossRef]
- Li, A.; Masouros, C.; Swindlehurst, A.L.; Yu, W. 1-Bit Massive MIMO Transmission: Embracing Interference with Symbol-Level Precoding. IEEE Commun. Mag. 2021, 59, 121–127. [Google Scholar] [CrossRef]
- Ding, G.; Anselmi, N.; Xu, W.; Li, P.; Rocca, P. Interval-Bounded Optimal Power Pattern Synthesis of Array Antenna Excitations Robust to Mutual Coupling. IEEE Antennas Wirel. Propag. Lett. 2023, 1, 1–5. [Google Scholar] [CrossRef]
- Pan, S.; Lin, M.; Xu, M.; Zhu, S.; Bian, L.-A.; Li, G. A Low-Profile Programmable Beam Scanning Holographic Array Antenna Without Phase Shifters. Int. Things J. 2022, 9, 8838–8851. [Google Scholar] [CrossRef]
- Hua, B.; Ni, H.; Zhu, Q.; Wang, C.-X.; Zhou, T.; Mao, K.; Bao, J.; Zhang, X. Channel modeling for UAV-to-ground communications with posture variation and fuselage scattering effect. IEEE Trans. Commun. 2023, 71, 3103–3116. [Google Scholar] [CrossRef]
- Mao, K.; Zhu, Q.; Qiu, Y.; Liu, X.; Song, M.; Fan, W.; Kokkeler, A.B.J.; Miao, Y. A UAV-Aided Real-Time Channel Sounder for Highly Dynamic Non-Stationary A2G Scenarios. IEEE Trans. Instrum. Meas. 2023, 72, 1–15. [Google Scholar]
- Shi, M.; Yang, K.; Niyato, D.; Yuan, H.; Zhou, H.; Xu, Z. The Meta Distribution of SINR in UAV-Assisted Cellular Networks. IEEE Trans. Commun. 2023, 71, 1193–1206. [Google Scholar] [CrossRef]
- Pan, J.; Ye, N.; Yu, H.; Hong, T.; Al-Rubaye, S.; Mumtaz, S.; Al-Dulaimi, A.; Chih-Lin, I. AI-Driven Blind Signature Classification for IoT Connectivity: A Deep Learning Approach. IEEE Trans. Wirel. Commun. 2022, 21, 6033–6047. [Google Scholar] [CrossRef]
- Li, A.; Masouros, C.; Vucetic, B.; Li, Y.; Swindlehurst, A.L. Interference Exploitation Precoding for Multi-Level Modulations: Closed-Form Solutions. IEEE Trans. Commun. 2021, 69, 291–308. [Google Scholar] [CrossRef]
- Li, B.; Zhang, M.Y.; Rong, Y.; Han, Z. Transceiver Optimization for Wireless Powered Time-Division Duplex MU-MIMO Systems: Non-Robust and Robust Designs. IEEE Trans. Wirel. Commun. 2022, 21, 4594–4607. [Google Scholar] [CrossRef]
- Fan, W.; Kyösti, P.; Hentilä, L.; Pedersen, G.F. A Flexible Millimeter-Wave Radio Channel Emulator Design With Experimental Validations. IEEE Trans. Antennas Propag. 2018, 66, 6446–6451. [Google Scholar] [CrossRef]
- Jiang, H.; Zhang, Z.C.; Wu, L.; Dang, J. Three-Dimensional Geometry-Based UAV-MIMO Channel Modeling for A2G Communication Environments. IEEE Commun. Lett. 2018, 22, 1438–1441. [Google Scholar] [CrossRef]
- Liu, J.; Yu, J.; Niyato, D.; Zhang, R.; Gao, X.; An, J. Covert Ambient Backscatter Communications with Multi-Antenna Tag. IEEE Trans. Wirel. Commun. 2023, 22, 6199–6212. [Google Scholar] [CrossRef]
- Mao, K.; Zhu, Q.M.; Song, M.Z.; Li, H.P.; Ning, B.Z.; Pedersen, G.F.; Fan, W. Machine-Learning-Based 3-D Channel Modeling for U2V mmWave Communications. IEEE Int. Things J. 2022, 9, 17592–17607. [Google Scholar] [CrossRef]
- N5106A PXB Channel Emulator. Available online: https://www.keysight.com (accessed on 13 May 2023).
- Shi, Y.F.; Zhou, S.H.; Wang, J. Design and Implementation of Cross band and Wide Bandwidth Dynamic Channel Simulator. In Proceedings of the 2021 13th International Symposium on Antennas, Propagation and EM Theory (ISAPE), Zhuhai, China, 1–4 December 2021; pp. 1–3. [Google Scholar]
- Azimuth ACE 400WB Channel Emulator. Available online: https://cdn.thomasnet.com (accessed on 25 May 2023).
- Hofer, M.; Xu, Z.N.; Vlastaras, D.; Schrenk, B.; Löschenbrand, D.; Tufvesson, F.; Zemen, T. Real-Time Geometry-Based Wireless Channel Emulation. IEEE Trans. Veh. Technol. 2019, 68, 1631–1645. [Google Scholar] [CrossRef]
- Iqbal, N.; Luo, J.; Müller, R.; Steinböck, G.; Schneider, C.; Dupleich, D.A.; Häfner, S.; Thomä, R.S. Multipath Cluster Fading Statistics and Modeling in Millimeter-Wave Radio Channels. IEEE Trans. Antennas Propag. 2019, 67, 2622–2632. [Google Scholar] [CrossRef]
- Gutierrez, C.A.; Patzold, M.; Sandoval, A.; Delgado-Mata, C. An Ergodic Sum-of-Cisoids Simulator for Multiple Uncorrelated Rayleigh Fading Channels Under Generalized Scattering Conditions. IEEE Trans. Veh. Technol. 2012, 61, 2375–2382. [Google Scholar] [CrossRef]
- Gutiérrez, C.A.; Pätzold, M. The generalized method of equal areas for the design of sum-of-cisoids simulators for mobile Rayleigh fading channels with arbitrary Doppler spectra. Wirel. Commun. Mob. Comput. 2013, 13, 951–966. [Google Scholar] [CrossRef]
- Bi, Y.M.; Zhang, J.H.; Zhu, Q.M.; Zhang, W.T.; Tian, L.; Zhang, P. A Novel Non-Stationary High-Speed Train (HST) Channel Modeling and Simulation Method. IEEE Trans. Veh. Technol. 2019, 68, 82–92. [Google Scholar] [CrossRef]
- Zhu, Q.M.; Huang, W.; Mao, K.; Zhong, W.Z.; Hua, B.Y.; Chen, X.M.; Zhao, Z.K. A Flexible FPGA-Based Channel Emulator for Non-Stationary MIMO Fading Channels. Appl. Sci. 2020, 10, 4161. [Google Scholar] [CrossRef]
- Ren, F.; Zheng, Y.R. Incorporating Correlation Matrices into Hardware Triply Selective Fading Channel Emulators Using Kronecker Product. In Proceedings of the 2010 IEEE 72nd Vehicular Technology Conference-Fall, Ottawa, ON, Canada, 6–9 September 2010; pp. 1–5. [Google Scholar]
- Ying, D.W.; Vook, F.W.; Thomas, T.A.; Love, D.J.; Ghosh, A. Kronecker product correlation model and limited feedback codebook design in a 3D channel model. In Proceedings of the 2014 IEEE International Conference on Communications (ICC), Sydney, Australia, 10–14 June 2014; pp. 5865–5870. [Google Scholar]
- Alimohammad, A.; Fard, S.F. FPGA-Based Bit Error Rate Performance Measurement of Wireless Systems. IEEE Trans. Very Large Scale Integr. 2014, 22, 1583–1592. [Google Scholar] [CrossRef]
- Huang, D.; Xin, L.; Huang, J.; Wang, C.-X. Adaptive Non-Stationary Vehicle-to-Vehicle MIMO Channel Simulator and Emulator. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023; pp. 1–6. [Google Scholar]
- Dong, S.L.; Zhang, T.T.; Wang, Y. A real-time simulation design of multi-path fading channel based on SOS method. In Proceedings of the 2019 IEEE 4th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chengdu, China, 20–22 December 2019; pp. 2550–2554. [Google Scholar]
- Green, P.J. Implementation of a real-time Rayleigh, Rician and AWGN multipath channel emulator. In Proceedings of the TENCON 2017—2017 IEEE Region 10 Conference, Penang, Malaysia, 5–8 November 2017; pp. 35–39. [Google Scholar]
- Kumar, P.A. FPGA implementation of the trigonometric functions using the CORDIC algorithm. In Proceedings of the 2019 5th International Conference on Advanced Computing & Communication Systems (ICACCS), Coimbatore, India, 15–16 March 2019; pp. 894–900. [Google Scholar]
- Changela, A.; Zaveri, M.; Lakhlani, A. FPGA implementation of asynchronous mousetrap pipelined radix-2 cordic algorithm. In Proceedings of the 2018 International Conference on Current Trends towards Converging Technologies (ICCTCT), Coimbatore, India, 1–3 March 2018; pp. 252–258. [Google Scholar]
- Rao, P.R.; Chakrabarti, I. High-performance compensation technique for the radix-4 CORDIC algorithm. IEEE Comput. Digit. Tech. 2002, 68, 219–228. [Google Scholar] [CrossRef]
- Oza, S.S.; Shah, A.P.; Thokala, T.; David, S. Pipelined implementation of high radix adaptive CORDIC as a coprocessor. In Proceedings of the 2015 International Conference on Computing and Network Communications (CoCoNet), Trivandrum, India, 16–19 December 2015; pp. 333–342. [Google Scholar]
- Parmar, Y.; Sridharan, K. Hardware-Efficient Velocity Estimation of Dynamic Obstacles Based on a Novel Radix-4 CORDIC and FPGA Implementation. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 3770–3775. [Google Scholar]
- Zhu, Q.M.; Zhao, Z.K.; Mao, K.; Chen, X.M.; Liu, W.Q.; Wu, Q.H. A Real-Time Hardware Emulator for 3D Non-Stationary U2V Channels. IEEE Trans. Circuits Syst. I 2021, 68, 3951–3964. [Google Scholar] [CrossRef]
- Huang, P.; Rajan, D.; Camp, J. Weibull and Suzuki fading channel generator design to reduce hardware resources. In Proceedings of the 2013 IEEE Wireless Communications and Networking Conference (WCNC), Shanghai, China, 7–10 April 2013; pp. 3443–3448. [Google Scholar]
- Aggarwal, S.; Meher, P.K.; Khare, K. Concept, design, and implementation of reconfigurable CORDIC. IEEE Trans Very Large Scale Integr. 2016, 24, 1588–1592. [Google Scholar] [CrossRef]
- Rekha, R.; Menon, K.P. FPGA implementation of exponential function using cordic IP core for extended input range. In Proceedings of the 2018 3rd IEEE International Conference on Recent Trends in Electronics, Information & Communication Technology (RTEICT), Bangalore, India, 18–19 May 2018; pp. 597–600. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fading Type | Fading Symbol | Communication Scenario |
|---|---|---|
| Rayleigh | Urban high-rise environments without LoS | |
| Rice | Urban and suburban areas with LoS | |
| Nakagami | High-rise buildings and rural areas | |
| Weibull | Urban areas | |
| Shadow | Tall buildings and terrain obstacles |
| Methods | Traditional Method in [27,28] | Proposed Method |
|---|---|---|
| System clock | 160 M | 160 M |
| Channel sample rate | 312.5 K | 312.5 K |
| Slice LUTs | 59,315 (13.69%) | 35,926 (8.29%) |
| Registers | 65,543 (7.56%) | 47,632 (5.49%) |
| DSP | 461 (12.81%) | 57 (1.58%) |
| Block RAM | 196 (13.33%) | 67 (4.55%) |
| Resource utilization | 11.85% | 4.98% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fang, S.; Mao, T.; Hua, B.; Ding, Y.; Song, M.; Zhou, Q.; Zhu, Q. A Scalable Spatial–Temporal Correlated Non-Stationary Channel Fading Generation Method. Electronics 2023, 12, 4132. https://doi.org/10.3390/electronics12194132
Fang S, Mao T, Hua B, Ding Y, Song M, Zhou Q, Zhu Q. A Scalable Spatial–Temporal Correlated Non-Stationary Channel Fading Generation Method. Electronics. 2023; 12(19):4132. https://doi.org/10.3390/electronics12194132
Chicago/Turabian StyleFang, Sheng, Tongbao Mao, Boyu Hua, Yuan Ding, Maozhong Song, Qiangjun Zhou, and Qiuming Zhu. 2023. "A Scalable Spatial–Temporal Correlated Non-Stationary Channel Fading Generation Method" Electronics 12, no. 19: 4132. https://doi.org/10.3390/electronics12194132
APA StyleFang, S., Mao, T., Hua, B., Ding, Y., Song, M., Zhou, Q., & Zhu, Q. (2023). A Scalable Spatial–Temporal Correlated Non-Stationary Channel Fading Generation Method. Electronics, 12(19), 4132. https://doi.org/10.3390/electronics12194132