
RETRACTED: WLP-VBL: A Robust Lightweight Model for Water Level Prediction



Abstract
1. Introduction
- We have proposed a novel model, namely WLP-VBL, by using a combination of VMD, BA, and LSTM for water level prediction. The proposed combination model exhibits significant improvement in accuracy compared to a single model.
- Unlike most of the studies that use raw data directly, the WLP-VBL takes into account the noise and fluctuations present in the original data and applies time-frequency processing and signal decomposition techniques, which have shown greater robustness.
2. Materials and Methods
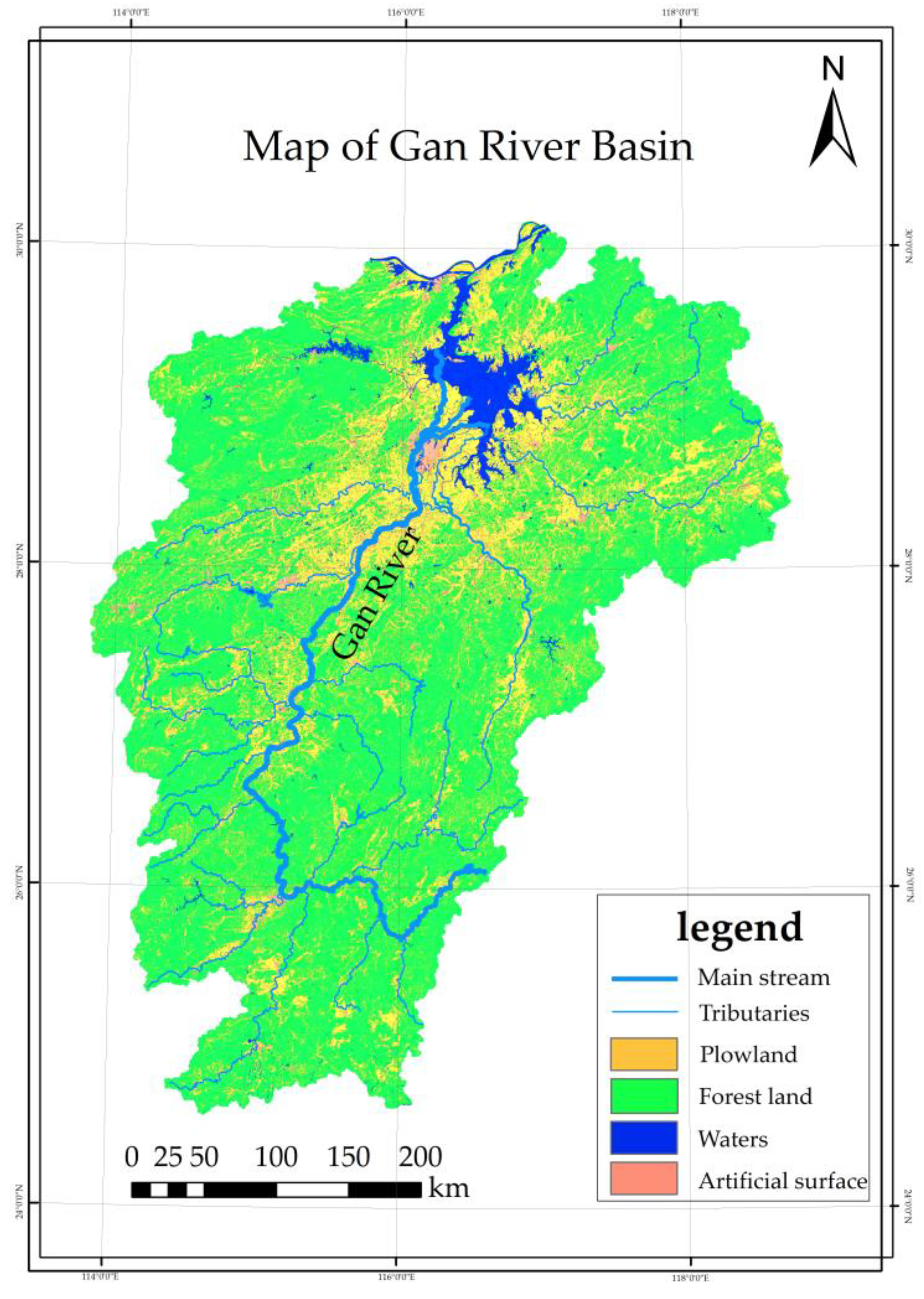
2.1. Materials
2.2. Methods
2.2.1. Time-Frequency Domain Signal Processing Based on DEM and VMD
2.2.2. Parameter Optimization Based on Bat Algorithm (BA)
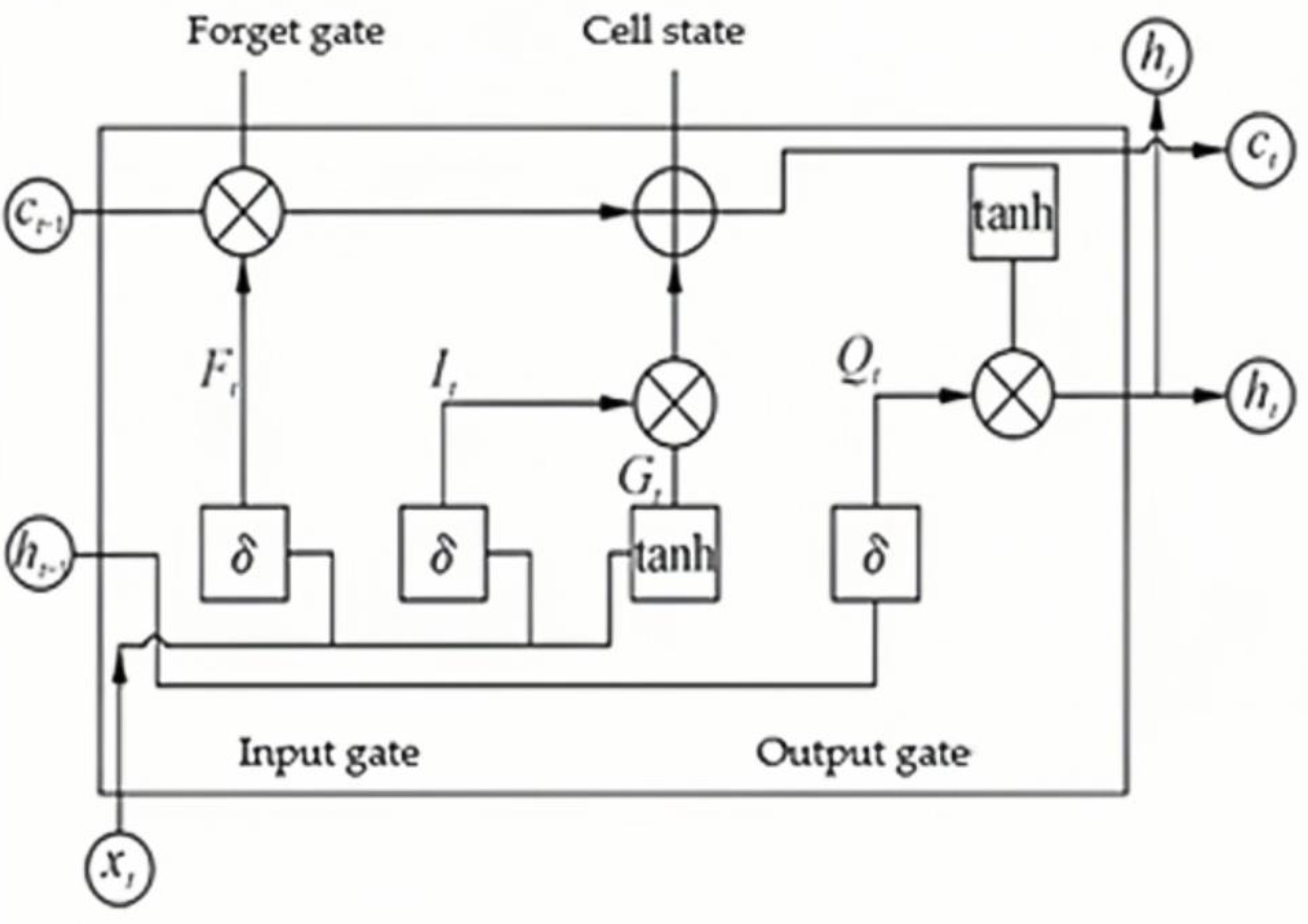
2.2.3. Long Short-Term Memory (LSTM)
3. Results
3.1. Experimental Environment
3.2. Evaluation Indicators
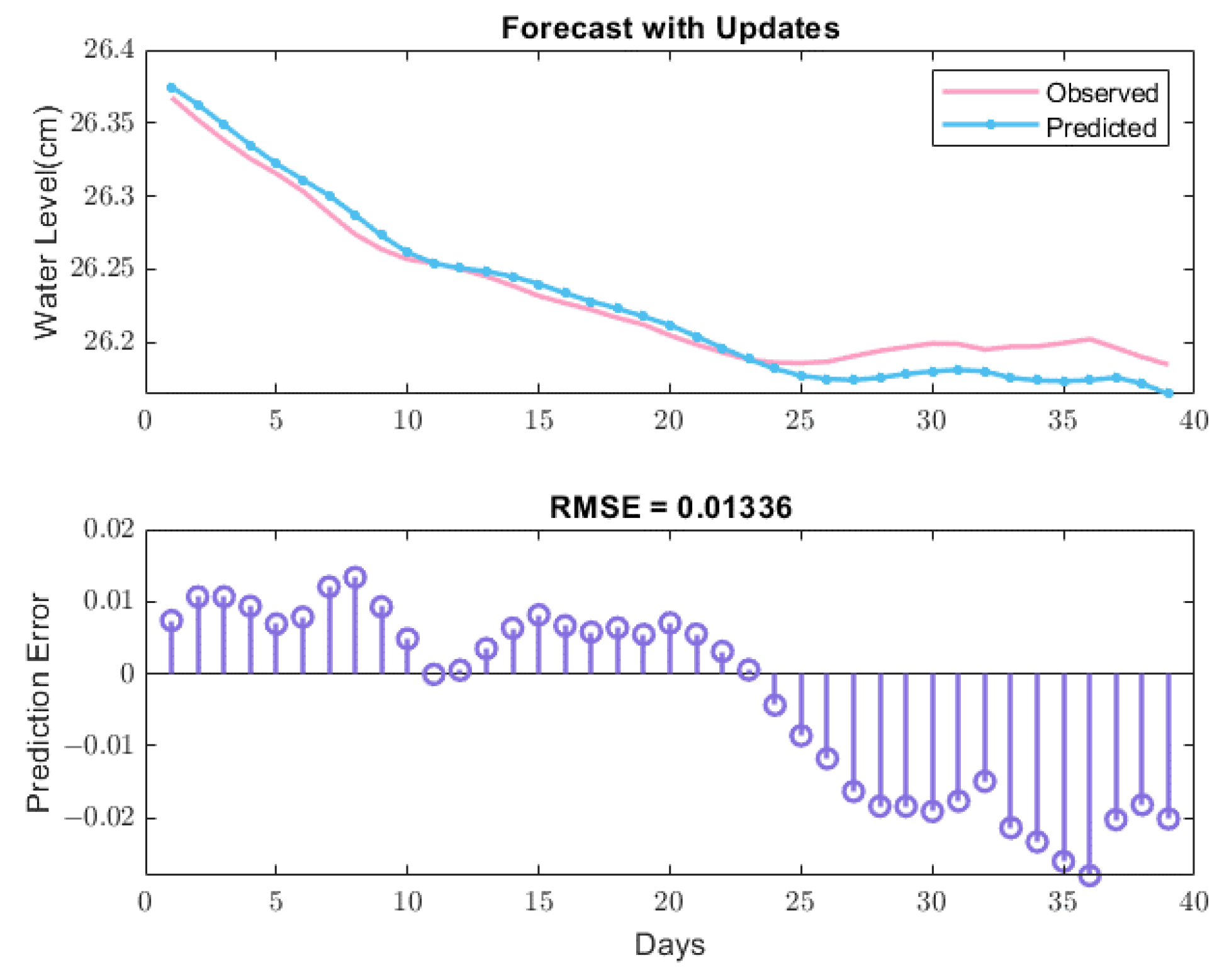
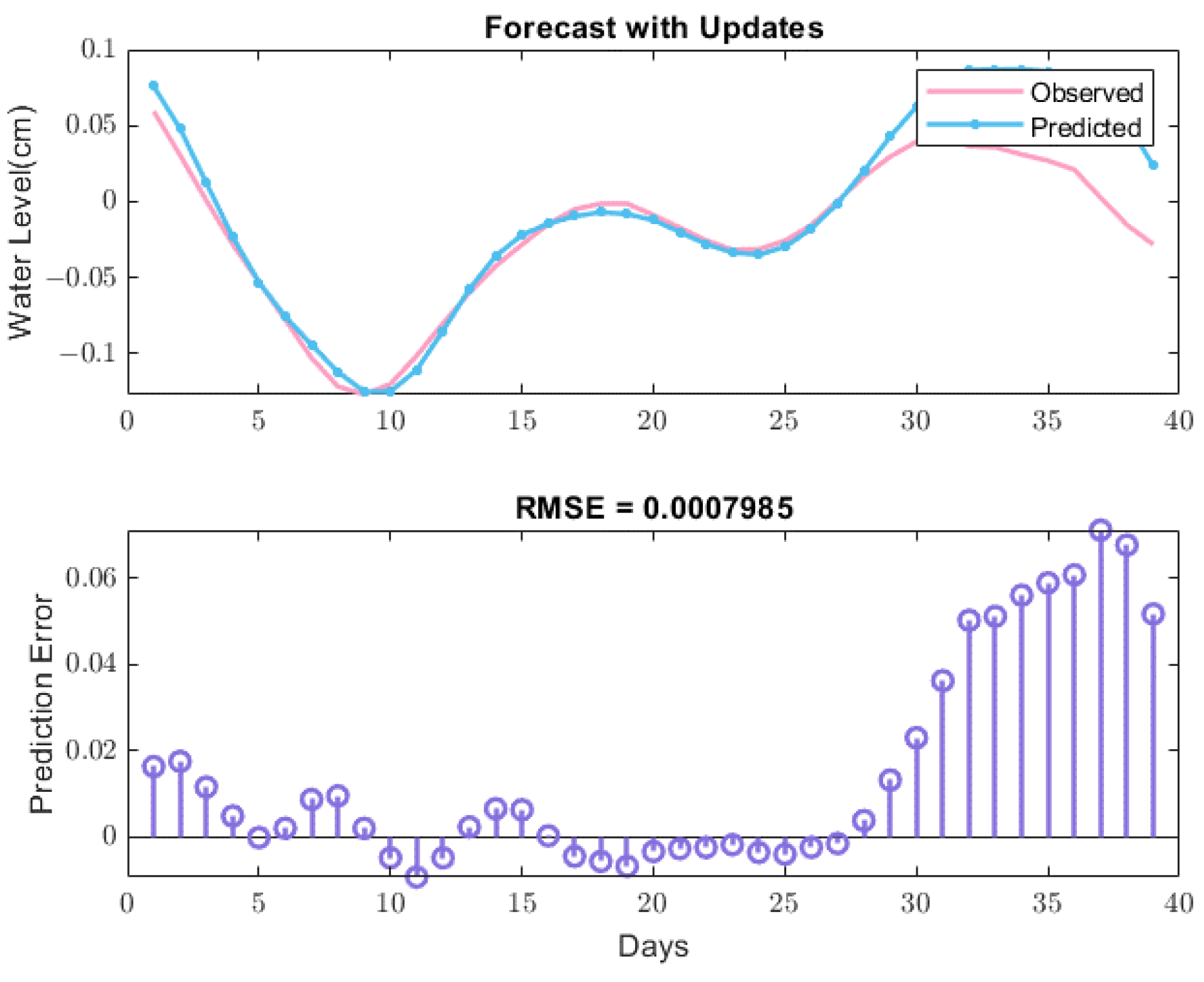
3.3. Results and Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| IMF | Intrinsic mode functions |
| Original signal | |
| Residual term | |
| K | Number of decomposed patterns |
| Wiener filtering for residual components | |
| Center frequency of modal function | |
| Frequency of the sound wave | |
| Best current position of bat | |
| Average loudness at current time step | |
| Pulse loudness | |
| Output from previous stage | |
| Input from this stage | |
| b | Bias terms for respective gates |
| W | Corresponding connection weights |
| Pulse emission frequency | |
| Cell status | |
| Current solution | |
| Input gate | |
| Output gate | |
| Forget gate | |
| Predicted value | |
| True value | |
| Greek symbols | |
| Dirac delta function | |
| α | Penalty term |
| λ | Lagrange function |
| β | Random value within [0,1] |
| η | Random value within [−1,1] |
| σ | Sigmoid function |
References
- Wang, S.; Gao, Y.; Jia, J.; Kun, S.; Lyu, S.; Li, Z.; Lu, Y.; Wen, X. Water level as the key controlling regulator associated with nutrient and gross primary productivity changes in a large floodplain-lake system (Lake Poyang), China. J. Hydrol. 2021, 599, 126414. [Google Scholar] [CrossRef]
- Kommineni, M.; Reddy, K.V.; Jagathi, K.; Reddy, B.D.; Roshini, A.; Bhavani, V. Groundwater level prediction using modified linear regression. In Proceedings of the 2020 6th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 March 2020; IEEE: Washington, DC, USA, 2020; Volume 9074313, pp. 1164–1168. [Google Scholar]
- Zhang, R.; Dong, Z.; Guo, H. Forecast of Poyang Lake’s Water Level by Wavelet-ANFIS Model. In Proceedings of the 2009 International Conference on Computational Intelligence and Natural Computing, Wuhan, China, 6–7 June 2009; IEEE: Washington, DC, USA, 2009; Volume 1, pp. 393–395. [Google Scholar]
- Alipour, A.; Jafarzadegan, K.; Mirzakhani, H. Global sensitivity analysis in hydrodynamic modeling and flood inundation mapping. Environ. Model. Softw. 2022, 152, 105398. [Google Scholar] [CrossRef]
- Ruslan, F.A.; Zain, Z.M.; Adnan, R. Flood water level prediction and tracking using particle filter algorithm. In Proceedings of the 2012 IEEE 8th International Colloquium on Signal Processing and Its Applications, Malacca, Malaysia, 23–25 March 2012; IEEE: Washington, DC, USA, 2012; Volume 6194763, pp. 431–435. [Google Scholar]
- Liu, Z.; Cheng, L.; Lin, K.; Cai, H. A hybrid bayesian vine model for water level prediction. Environ. Model. Softw. 2021, 142, 105075. [Google Scholar] [CrossRef]
- Yu, Z.; Lei, G.; Jiang, Z.; Liu, F. ARIMA modelling and forecasting of water level in the middle reach of the Yangtze River. In Proceedings of the 2017 4th International Conference on Transportation Information and Safety (CTIS), Banff, AB, Canada, 8–10 August 2017; IEEE: Washington, DC, USA, 2017; Volume 8047762, pp. 172–177. [Google Scholar]
- Wang, H.; Song, L. Water Level Prediction of Rainwater Pipe Network Using an SVM-Based Machine Learning Method. Int. J. Pattern Recognit. Artif. Intell. 2019, 34, 2051002. [Google Scholar] [CrossRef]
- Feng, W.; Lei, X.; Wang, C.; Huang, H. Study on water level prediction method of Shaping Hydropower Station based on BP neural network. In Proceedings of the 2021 7th International Conference on Hydraulic and Civil Engineering & Smart Water Conservancy and Intelligent Disaster Reduction Forum (ICHCE & SWIDR), Nanjing, China, 6–8 November 2021; IEEE: Washington, DC, USA, 2021; Volume 9656344, pp. 1713–1716. [Google Scholar]
- Sun, Q.; Wan, J.; Liu, S. Estimation of sea level variability in the China Sea and its vicinity using the SARIMA and LSTM models. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3317–3326. [Google Scholar] [CrossRef]
- Du, N.; Liang, X. Short-term water level prediction of Hongze Lake by Prophet-LSTM combined model based on LAE. In Proceedings of the 2021 7th International Conference on Hydraulic and Civil Engineering & Smart Water Conservancy and Intelligent Disaster Reduction Forum (ICHCE & SWIDR), Nanjing, China, 6–8 November 2021; IEEE: Washington, DC, USA, 2021; Volume 9656315, pp. 255–259. [Google Scholar]
- Stateczny, A.; Narahari, S.C.; Vurubindi, P.; Guptha, N.S.; Srinivas, K. Underground Water Level Prediction in Remote Sensing Images Using Improved Hydro Index Value with Ensemble Classifier. Remote Sens. 2023, 15, 2015. [Google Scholar] [CrossRef]
- Sun, J.; Hu, L.; Li, D.; Sun, K.; Yang, Z. Data-driven models for accurate groundwater level prediction and their practical significance in groundwater management. J. Hydrol. 2022, 608, 127630. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, X.; Lü, X. Short term water level prediction based on C-Stacking ensemble model. In Proceedings of the 2021 7th International Conference on Hydraulic and Civil Engineering & Smart Water Conservancy and Intelligent Disaster Reduction Forum (ICHCE & SWIDR), Nanjing, China, 6–8 November 2021; IEEE: Washington, DC, USA, 2021; Volume 9656410, pp. 116–121. [Google Scholar]
- Khanesar, M.A.; Branson, D.T. Prediction Interval Identification Using Interval Type-2 Fuzzy Logic Systems: Lake Water Level Prediction Using Remote Sensing Data. IEEE Sens. J. 2021, 21, 13815–13827. [Google Scholar] [CrossRef]
- Fei, K.; Du, H.; Gao, L. Accurate water level predictions in a tidal reach: Integration of Physics-based and Machine learning approaches. J. Hydrol. 2023, 622, 129705. [Google Scholar] [CrossRef]
- Chaudhary, P.; D’aronco, S.; Leitão, J.; Schindler, K.; Wegner, J. Water level prediction from social media images with a multi-task ranking approach. ISPRS J. Photogramm. Remote Sens. 2020, 167, 252–262. [Google Scholar] [CrossRef]
- Yuan, Z.; Liu, J.; Liu, Y.; Zhang, Q.; Li, Y.; Li, Z. A two-stage modelling method for multi-station daily water level prediction. Environ. Model. Softw. 2022, 156, 105468. [Google Scholar] [CrossRef]
- Ranawat, N.S.; Prakash, J.; Miglani, A.; Kankar, P.K. Performance evaluation of LSTM and Bi-LSTM using non-convolutional features for blockage detection in centrifugal pump. Eng. Appl. Artif. Intell. 2023, 122, 106092. [Google Scholar] [CrossRef]
- Mounir, N.; Ouadi, H.; Jrhilifa, I. Short-term electric load forecasting using an EMD-BI-LSTM approach for smart grid energy management system. Energy Build. 2023, 288, 113022. [Google Scholar] [CrossRef]
- Boudraa, A.O.; Cexus, J.C. EMD-based signal filtering. IEEE Trans. Instrum. Meas. 2007, 56, 2196–2202. [Google Scholar] [CrossRef]
- Huang, W.; Wang, R.; Zhuang, Y.; Wang, Z.; Du, Q. Adaptive Harmonic Detection of Active Power Filter based on Improved VMD. In Proceedings of the 2022 IEEE 5th International Electrical and Energy Conference (CIEEC), Nanjing, China, 27–29 May 2022; IEEE: Washington, DC, USA, 2022; pp. 2682–2686. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, Y.; Xu, Z. Thermal Load Forecasting of an Ultra-short-term Integrated Energy System Based on VMD-CNN-LSTM. In Proceedings of the 2022 International Conference on Big Data, Information and Computer Network (BDICN), Sanya, China, 20–22 January 2022; IEEE: Washington, DC, USA, 2022; pp. 264–269. [Google Scholar]
- Yang, X.S.; Hossein Gandomi, A. Bat algorithm: A novel approach for global engineering optimization. Eng. Comput. 2012, 29, 464–483. [Google Scholar] [CrossRef]
- Griffiths, C.A.; Giannetti, C.; Andrzejewski, K.T.; Morgan, A. Comparison of a Bat and Genetic Algorithm Generated Sequence Against Lead through Programming When Assembling a PCB Using a Six-Axis Robot with Multiple Motions and Speeds. IEEE Trans. Ind. Inform. 2021, 18, 1102–1110. [Google Scholar] [CrossRef]
- Singh, D.; Salgotra, R.; Singh, U. A novel modified bat algorithm for global optimization. In Proceedings of the 2017 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 17–18 March 2017; IEEE: Washington, DC, USA, 2017; pp. 1–5. [Google Scholar]
- Greff, K.; Srivastava, R.K.; Koutník, J.; Steunebrink, B.R.; Schmidhuber, J. LSTM: A search space odyssey. IEEE Trans. Neural Netw. Learn. Syst. 2016, 28, 2222–2232. [Google Scholar] [CrossRef] [PubMed]
- Raj, N.; Brown, J. Prediction of Mean Sea Level with GNSS-VLM Correction Using a Hybrid Deep Learning Model in Australia. Remote Sens. 2023, 15, 2881. [Google Scholar] [CrossRef]
- Liang, D.; Xu, J.; Li, S.; Sun, C. Short-term passenger flow prediction of rail transit based on VMD-LSTM neural network combination model. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; IEEE: Washington, DC, USA, 2020; pp. 5131–5136. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | VMD-BA-LSTM | LSTM | BA-LSTM | EMD-LSTM | VMD-LSTM |
|---|---|---|---|---|---|
| MSE | 0.000768 | 0.083367 | 0.034202 | 0.003031 | 0.002527 |
| MAE | 0.000827 | 0.009964 | 0.005952 | 0.055055 | 0.001504 |
| K | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|
| MSE | 0.033695 | 0.038153 | 0.000768 | 0.040341 | 0.032462 |
| MAE | 0.001012 | 0.001176 | 0.000827 | 0.001131 | 0.001016 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, C.; Huang, W.; Pan, H.; Dong, J. RETRACTED: WLP-VBL: A Robust Lightweight Model for Water Level Prediction. Electronics 2023, 12, 4048. https://doi.org/10.3390/electronics12194048
Yi C, Huang W, Pan H, Dong J. RETRACTED: WLP-VBL: A Robust Lightweight Model for Water Level Prediction. Electronics. 2023; 12(19):4048. https://doi.org/10.3390/electronics12194048
Chicago/Turabian StyleYi, Congqin, Wenshu Huang, Haiyan Pan, and Jinghan Dong. 2023. "RETRACTED: WLP-VBL: A Robust Lightweight Model for Water Level Prediction" Electronics 12, no. 19: 4048. https://doi.org/10.3390/electronics12194048
APA StyleYi, C., Huang, W., Pan, H., & Dong, J. (2023). RETRACTED: WLP-VBL: A Robust Lightweight Model for Water Level Prediction. Electronics, 12(19), 4048. https://doi.org/10.3390/electronics12194048