1. Introduction
In the last decades, permanent magnet synchronous motors have become extensively used in various industry applications, especially in electric vehicles, owing to their efficiency and high power density [
1]. Nevertheless, these motors are susceptible to inter-turn short circuit faults due to various reasons, such as mechanical stresses, temperature rise, and electrical overload [
2]. This type of failure represents about 38% of all motor faults [
3,
4]. Impulsive short circuits may result in elevated magnetic counter fields, thereby augmenting the probability of demagnetization. Furthermore, the abrupt short-circuit stimulates a significant temporary alternating electromagnetic torque that could potentially inflict harm upon either the coupling or the machinery shaft [
5]. Therefore, detecting these faults is crucial for ensuring the reliable and safe operation of electric vehicles.
In the aims of ITSC fault detection techniques, recent researchers employed three principal methodologies classified as [
6,
7,
8,
9]: the signal analysis method, the method based on artificial knowledge, and the method based on a model.
In the case of the signal-based methods, fault identification is accomplished through an assessment of the distinction in measured signals between a healthy PMSM and a defective PMSM, for instance, Fast Fourier Transform (FFT) [
10], which can be utilized to process the stationary signal, or also the short-time, time–frequency methods, Fourier Transform (STFT) [
11], Discrete wavelet transform (DWT) [
12], transform of Hilbert-Huang (HHT) [
13] and Empirical Mode Decomposition (EMD) [
14] which always uses frequency spectrum analysis. However, these methods present operational hurdles owing to the considerable computational load involved, and the absence of signals identifying fault characteristics does not necessarily ensure the optimal operational status of the machine [
15].
Currently, the knowledge–data diagnostic techniques that have reached a higher level of development and sophistication are Support Vector Machine (SVM), expert systems, neural networks (NN) and fuzzy logic (FL), and deep learning [
4,
16,
17,
18]. The efficacy and resilience of these methods have been demonstrated in detecting faults [
19,
20,
21]. However, the aforementioned techniques require considerable datasets for prompt training, thus resulting in a resource-intensive and time-consuming process owing to the requirement of specialized software and hardware.
Regarding the analytical model-based method, it is prevalent as it provides numerous benefits. Notably, it allows for precise identification of inter-turn short circuits present in electrical machines, as it requires a precise mathematical representation of the machine describing the relationship between the motor’s inputs and its outputs. By using the nominal values and comparing them to the model predictions, fault detection can be achieved and detected at an early stage [
22]. This approach utilizes a variety of techniques, including the Extended Kalman Filter (EKF), which testifies to a lack of academic research on this specific issue concerning the PMSM motor.
A combination of the Particle Swarm Optimization (PSO) algorithm and the Artificial Neural Network (ANN) has been proposed in [
23] to provide factual data concerning the specific characteristics, position, and intensity of a short circuit fault observed in a permanent magnet synchronous motor (PMSM). The use of the EKF algorithm enables real-time data processing and the subsequent application of the Artificial Neural Network (ANN) for online training purposes.
In [
24], the authors use an extended conventional state vector Kalman Filter algorithm to estimate three short-circuited turn ratios for a permanent-magnet synchronous generator. In [
25], the EKF was applied to Switched reluctance motors (SRMs) for fault detection based on the residual signal of the resistance.
In [
26], authors propose a method for detecting ITSC faults in PMSMs operating through sensorless input-output linearization control, which incorporates the EKF observer to estimate the stator resistance and the rotor speed. The method uses the Fast Fourier Transform (FFT) to analyze and identify any variations in the stator resistance, specifically in stationary states. Additionally, the method applies the Discrete Wavelet Transform (DWT) to detect such variations in non-stationary states, thereby confirming the presence of inter-turn faults.
In a similar manner, the use of the unscented Kalman filter (UKF) in [
27] was also implemented. The outcomes illustrated that the UKF methodology yields more accurate estimations for identifying faults as compared to the extended Kalman filter (EKF). At the same time, authors in [
28] have conducted practical trials to confirm the effectiveness of implementing EKF for the purpose of obtaining the motor current signals (MCS) and the motor voltage signals (MVS) for the identification of ITSC in induction motors (IM).
Recently, authors in [
29] carried out a study about the detection and identification of ITSC in stator windings in induction motors by applying FFT and STFT analysis using the residual current between the actual stator current and the estimated one by EKF. This study confirms the effectiveness of the STFT analysis compared to the FFT analysis.
Low cost, real-time application, and less data required are the most important features in industrial applications interested in fault detection in electric vehicle motors. Thus, considering these factors, the primary aim of this study is to ascertain the existence of inter-turn short circuit faults that can be observed within permanent magnet synchronous machines governed by FOC through the application of the Extended Kalman Filter (EKF) technique, regardless of the difficulty of online fault detection in close loop control. Additionally, the use of fuzzy logic for stator resistance estimation is incorporated to account for potential parameter fluctuations and improve the EKF’s performance.
The following sections of this manuscript are structured as follows: In
Section 2, the faulty PMSM model in the α-β reference frame is delineated.
Section 3 elaborates on the fundamental approach proposed for detecting ITSC faults by incorporating an apt model of an extended Kalman Filter that utilizes Fuzzy Logic for accurately evaluating stator resistance. Finally, the fault detection method, as proposed, is outlined and validated through the achievement of several tests in the MATLAB/Simulink environment.
2. PMSM Faulty Model
The studied machine topology in the present work is a surface-mounted PMSM with one slot per pole and per phase, where the three stator phases are connected in a star without a neutral connection. The mathematical representation of the machine in this study is formulated based on the following set of assumptions:
The magnetic circuit of the machine is unsaturated;
The electromotive forces (EMFs) follow a sinusoidal distribution;
The air gap is of uniform thickness;
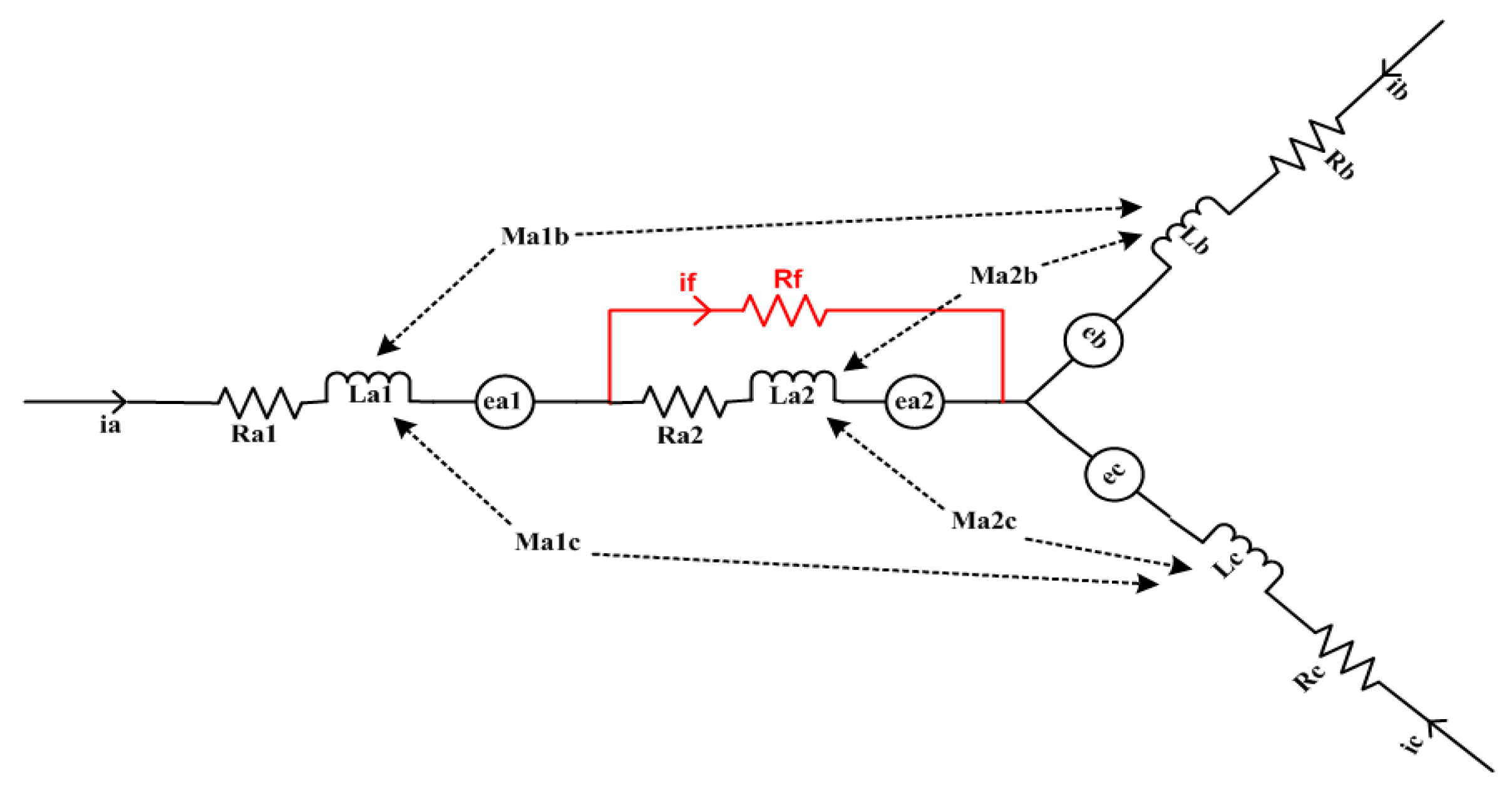
Figure 1 shows the representation of the faulty PMSM model where the inter-turn short circuit occurs in phase
A. In fact, the fault resistance value
Rf indicates the intensity of the insulation defect. The winding where the fault occurs is therefore split into two parts [
30]:
a1 is the sub-winding of the healthy part, and a2 represents the sub-winding of the short-circuited part; Ra1, Ra2 and La1, La2 are, respectively, the resistance and the inductance of the healthy and faulty sub-winding and the parameters Mxy defines the mutual inductance between the sub-winding from phase A and phase y.
In addition, we have defined the coefficient
µ, which describes the relative number of short circuit turns.
where
Nf is the number of turns of the sub-winding
a2 concerned by the fault, and
Ns represent the number of turns per phase.
Figure 1.
The equivalent circuit of faulty PMSM in phase A.
Figure 1.
The equivalent circuit of faulty PMSM in phase A.
Considering that
Ma2b =
Ma2c because the
a1 and
a2 sub-winding axes are aligned compared to
A axe, the global matrix form of voltage equations is represented as follows:
with
and
where
ias,
ibs,
ics and
Vas,
Vbs,
Vcs are the currents and the voltages of the stator phase.
Rs is the stator resistance,
Ls represents the mutual inductance,
eas,
ebs, and
ecs are the back electromotive EMF, and
if is the short-circuit fault current.
The electromagnetic torque
Te and the mechanical equation are expressed as follows:
where
ω,
J,
fr,
Tload are, respectively, the mechanical angular velocity, the rotor inertia, the frictional coefficient and the load torque.
The application of Clark transformation on Equations (2) and (3) leads to the circuit matrix below:
where:
On the other hand, the mechanical equation of the motor became:
3. Proposed Method
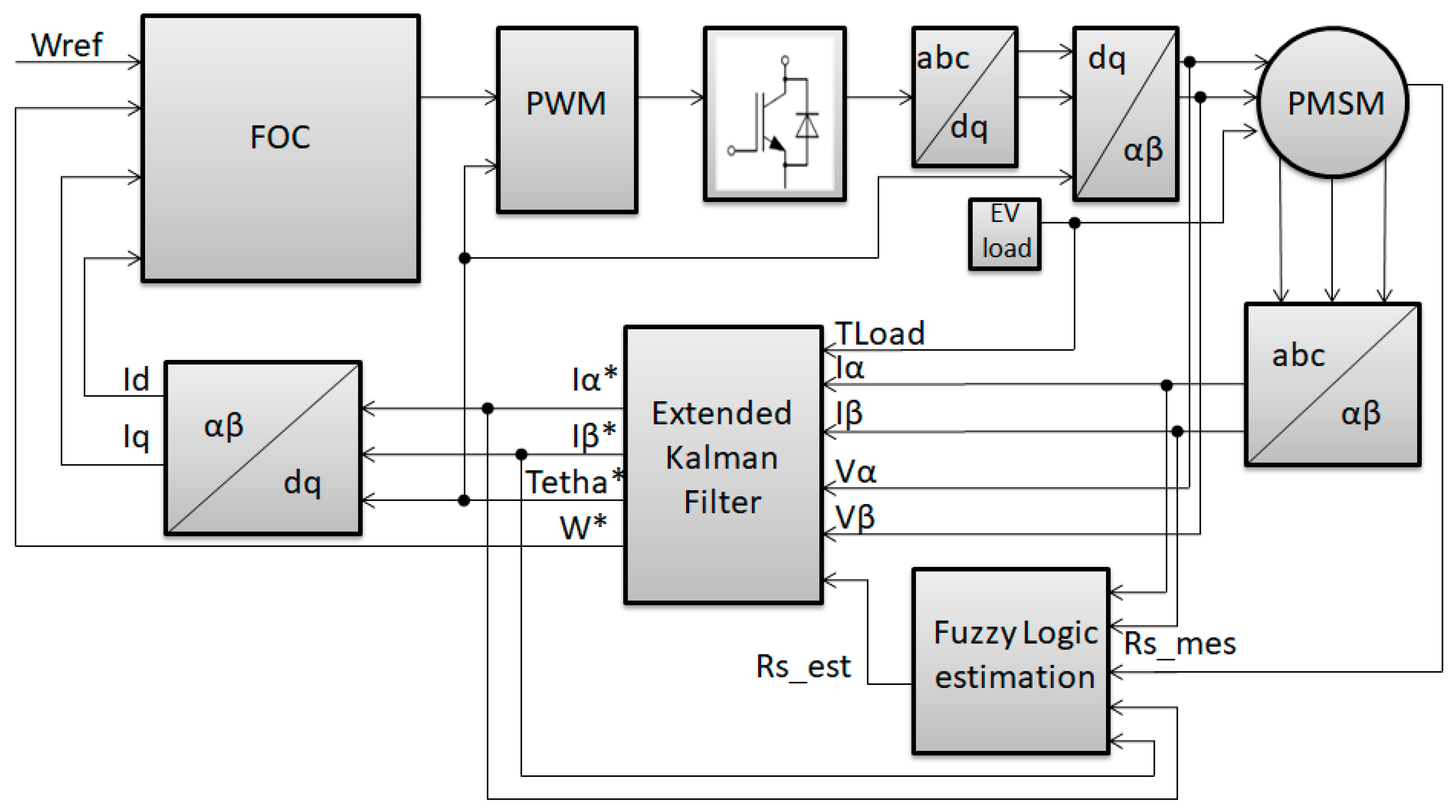
The main idea of this work consists of estimating the stator resistance using a Fuzzy Logic Estimator and providing it to the EKF as an additional state for a better assessment.
Figure 2 illustrates the global structure of the proposed EKF-LF fault detection method. Here, the fuzzy controller takes in two parameters, specifically the discrepancy between the stator current
e and its derivative
e′, and produces a single outcome, which is the change in the stator resistance ∆
Rs. Scaling factors are employed at the input and output stages of the FL estimation process to modify its sensitivity while preserving its overall structure. The stator current error
e and its derivative
e′ are normalized before being fed into the FL estimation. The EKF uses the estimated stator resistance along with the rest of the parameters to estimate stator currents, rotor position and speed states [
31]. Comparing these estimated values to a threshold where an overtaking confirms the existence of the inter-turn short circuit fault.
3.1. Model of the Extended Kalman Filter
3.1.1. Extended Kalman Filter Principal
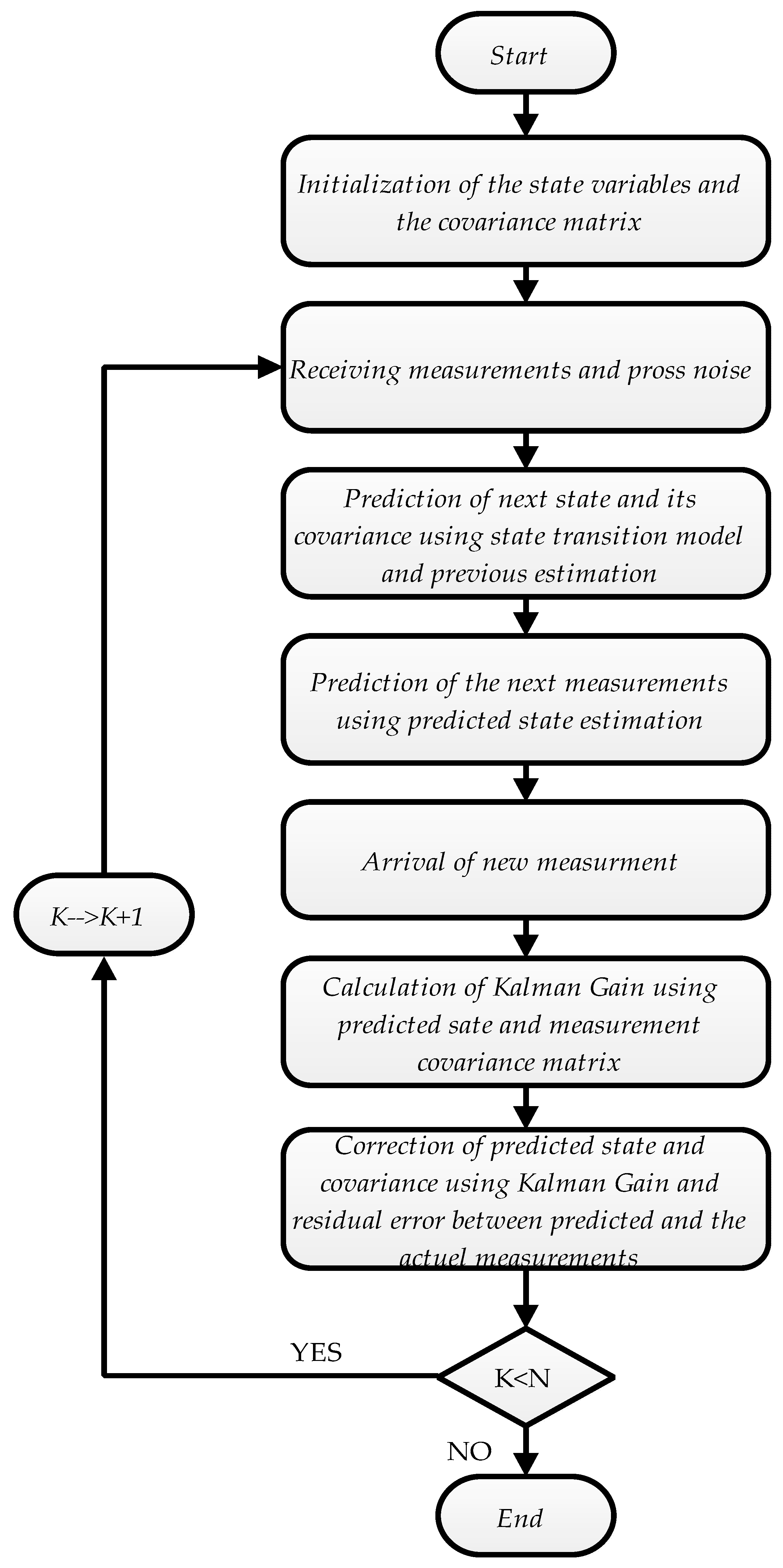
The extended Kalman filter (EKF) is a variant of the Kalman filter algorithm designed to handle nonlinear systems. Its primary purpose is to accurately estimate the state of a dynamical system, even when noise is present. The EKF is a recursive algorithm that updates the state estimate and its covariance based on measurements of the system and prediction of its dynamics. The EKF can handle nonlinearities in the system dynamics by approximating them as linear in small regions around the current state estimate. This is accomplished through the implementation of a Taylor series expansion technique, wherein the nonlinear functions are approximated by linearized versions around the present estimation. Consequently, a linearized Jacobian rendition of the system’s dynamics is obtained. The algorithm encompasses a series of essential actions concisely in two steps: the prediction and the update; these two steps operate at each sampling period
Ts where the superscripts
k and
k + 1 refer to the time before and after the measurements have been processed. The EKF process is detailed in
Figure 3 [
32].
Initially, the state estimate and covariance are upgraded depending on the system’s dynamics model. The following expression represents the initial state vector estimation:
where:
x(k): The state vector.
g(k): The transition matrix.
z(k): The measurement vector.
h(k): The non-linear measurement function.
w(k) and v(k): The process and the measurement disturbances, respectively.
Within the prediction step, the estimate covariance is calculated through:
where:
During this particular stage of the Extended Kalman Filter (EKF) process, a fresh set of measurements is acquired, leading to the correction phase. Using the estimation error covariance matrix
P, the Kalman gain
K (
k + 1) is obtained from the following expressions:
Here:
R: the covariance matrix of the measurements noise.
Finally, the correction of the predicted state
(
k + 1) is achieved by the following equation:
3.1.2. Extended Kalman Filter Simulation Model
The PMSM space-state model for EKF can be obtained according to Equations (5) and (6) based on the stationary reference frame (
αβ) as the following model:
where, the state vector
.
The input vector
The output vector
And .
Here, the avoidance of the rotor position utilization accomplished by the mean of the stationary reference (αβ) frame because it turns out that those errors in estimating the initial position of the rotor can lead to serious consequences by introducing errors in the EKF process.
The EKF employs the control inputs of the system and the measurement data to provide estimates for the states of the PMSM machine.
For the implementation of EKF in this work, we use the discrete dynamic model derived from (13) given by the subsequent expressions:
An essential aspect to consider during the design of the Extended Kalman Filter (EKF) lies in the selection of suitable values for the variance, and the covariance matrices
Q and
R. Modifying these matrix values can yield an impact on both the dynamics and stability of the filtering process. In the present study, the values for
Q and
R were determined through trial and error experimentation.
3.2. Fuzzy Logic Stator Resistance Estimator
The non-linearity in the PMSM has a great impact on the accuracy of the stator resistance estimation [
33,
34,
35]. Thence, fuzzy logic is considered an appropriate intelligent approach to identify the optimal value of Rs and helps EKF to detect the ITSC.
Figure 4 illustrates the fundamental structure of the fuzzy stator resistance estimator [
17].
To predict the error of the stator resistance
e, the discrepancy in the stator current vector between the estimated value
I* and the reference value
I is measured and denoted as the stator current vector error and defined as follows:
The fuzzy estimator acquires the stator resistance error e and its derivative e′ as inputs after they were normalized. While the obtained result is the variation in stator resistance value denoted as ∆Rs, then the final value Rs is obtained through the persistent addition of the incrementally valued stator resistance ∆Rs to the measured stator resistance Rmes.
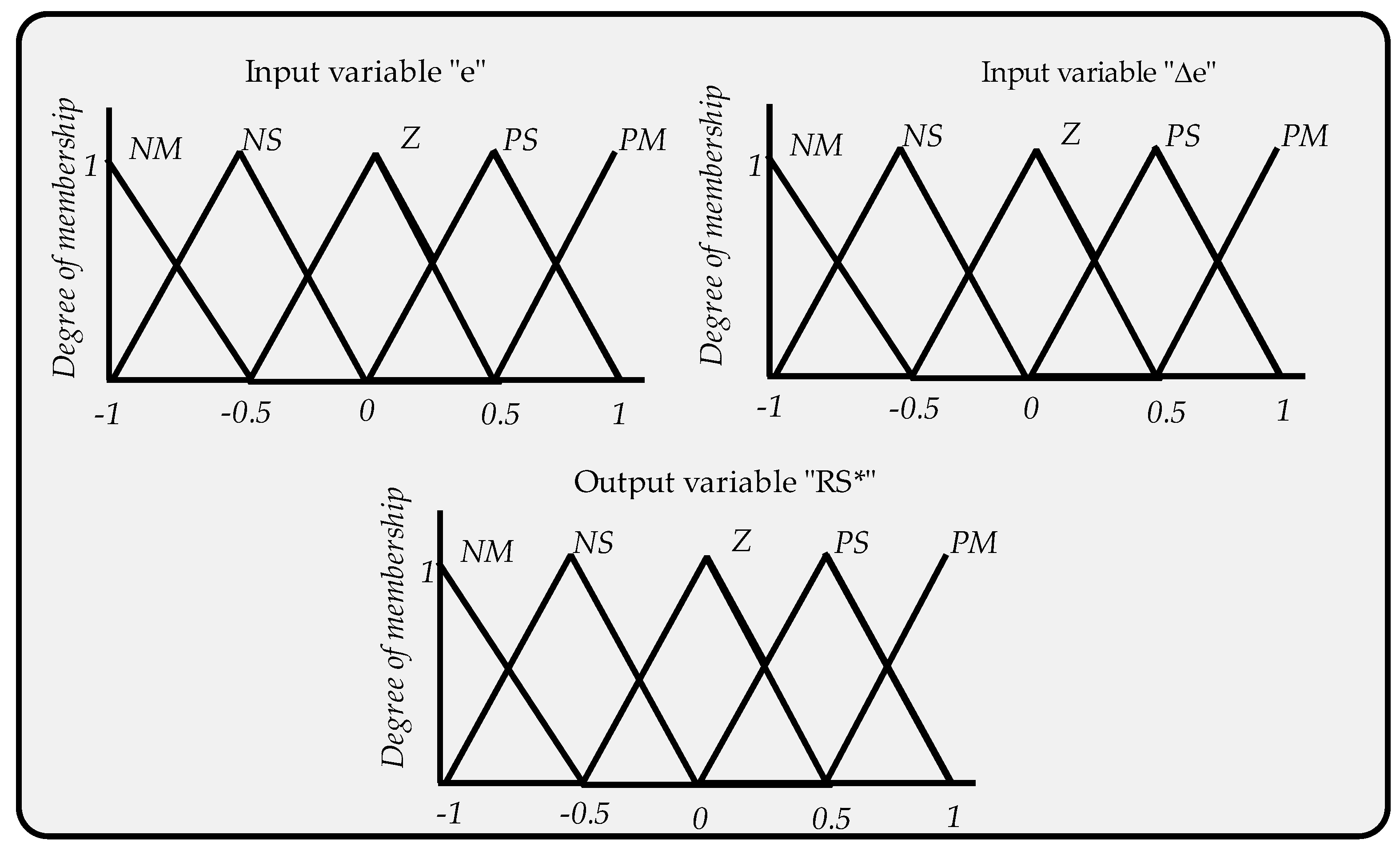
The utilization of triangular membership functions, as depicted in
Figure 5, has facilitated the conversion of the clear-cut intake and the outturn variables into the corresponding fuzzy variables. The inputs
e and
e′ exhibit identical distribution characteristics and possess identical membership functions [
17].
In our case, the fuzzy estimator variables are decomposed into five levels represented by a set of linguistic variables: Negative Medium (NM), Negative Small (NS), Zero (Z), Positive Small (PS) and Positive Medium (PM).
The Mamdani type inference procedure has been applied, and the change in the stator resistance value is calculated by the following rule:
If e is A and e′ is B, then ∆Rs is C
Where
A,
B and
C represent the linguistic variables, a total of 25 combinations take place are resumed in
Table 1.
4. Results and Discussion
The following section outlines the simulations acquired from the faulty PMSM drive regarding the proposed technique of ITSC fault detection using Matlab/Simulink, capitalizing on findings from studies that effectively verified experiments in comparable scenarios [
23,
26,
36]. This was done to evaluate the efficiency of ITSC fault detection in the stator winding of Permanent Magnet Synchronous Motors (PMSM), as well as to gauge the performance of Extended Kalman Filter (EKF) estimation alongside the evaluation of fuzzy stator resistance estimation.
The present study concerns phase
A as the faulty phase. The main specifications of the simulated PMSM motor are presented in
Table 2. Throughout this simulation, an initial torque load of 1 N∙m is exerted.
Throughout the simulation, two tests are carried out:
4.1. Sensitivity and Robustness Test
To assess the accuracy and efficiency of the suggested methodology. We used two main parameters’ variation: the resistance fault
Rf, where the occurrence of a short circuit leads to a significant decrease in the resistance value specifically when
Rf assumes zero, it indicates a definitive, clear short circuit fault, and the second parameter is the relative number of short circuit turns
µ, it also denotes as the percentage of the fault. As this percentage increases, it indicates a corresponding escalation in the severity of the defect’s degree.
Table 3 illustrates a compressive account of fault severity based on the amalgamation of the variation in the two mentioned parameters.
We start by evaluating the simulation in a healthy state. Then, the ITSC fault appears at t = 0.3 s. The faulty state characterized by the fault resistance Rf takes 10 Ω along with 40 sub-winding turns at t = 0.3 s, then Nf is subsequently increased to 80 by 0.5 s.
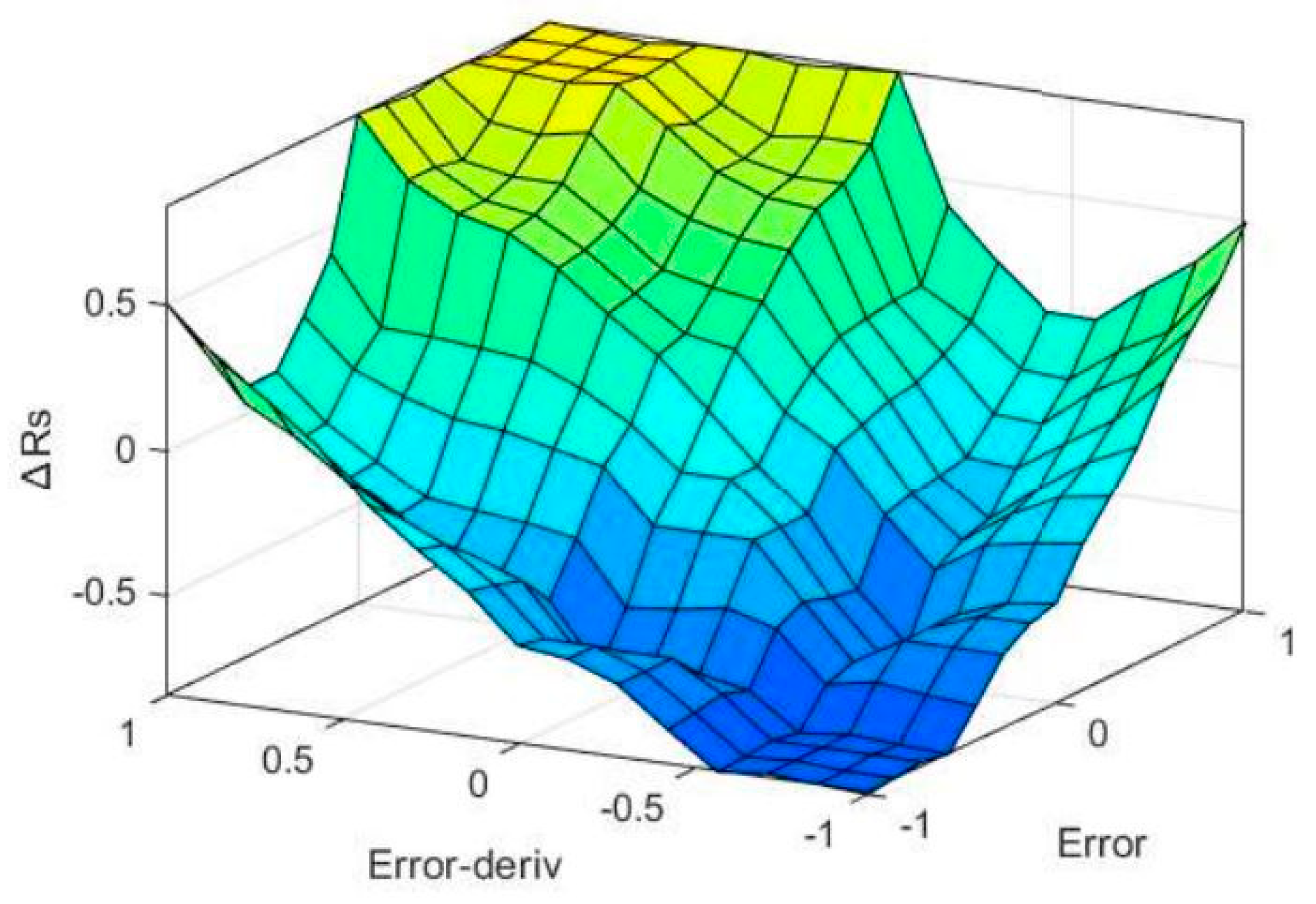
Additionally, a further test involved the reduction of the faulty resistance value
Rf to 1, indicating the severest ITSC conditions. The resultant relationship between inputs and output of the stator resistance fuzzy logic estimator is indicated by a three-dimensional visual representation, as illustrated in
Figure 6.
Figure 7a represents the prediction of the stator resistance
Rs value where the actual value of
Rs starts at 0.44 Ω in the healthy motor state; then for
Rf = 10 Ω,
Rs decreases by 0.009 Ω according to 25% of the fault rate considered at t = 0.3 s. The increase of the fault rate to 50% at t = 0.5 s leads to more diminution in
Rs value. Hence, the reduction in stator resistance is concurrently associated with the generation of several oscillations resulting from inter-turn short circuits.
Notably, for the low value of
Rf in
Figure 7b, the decrease in
Rf to 1 Ω shows the same behavior for
Rs in addition to an augmentation in the ripple’s magnitude. However, the findings demonstrate a precise assessment compared to the results in [
26], which validates the effectiveness of the stator resistance fuzzy logic estimator under the severest conditions of ITSC.
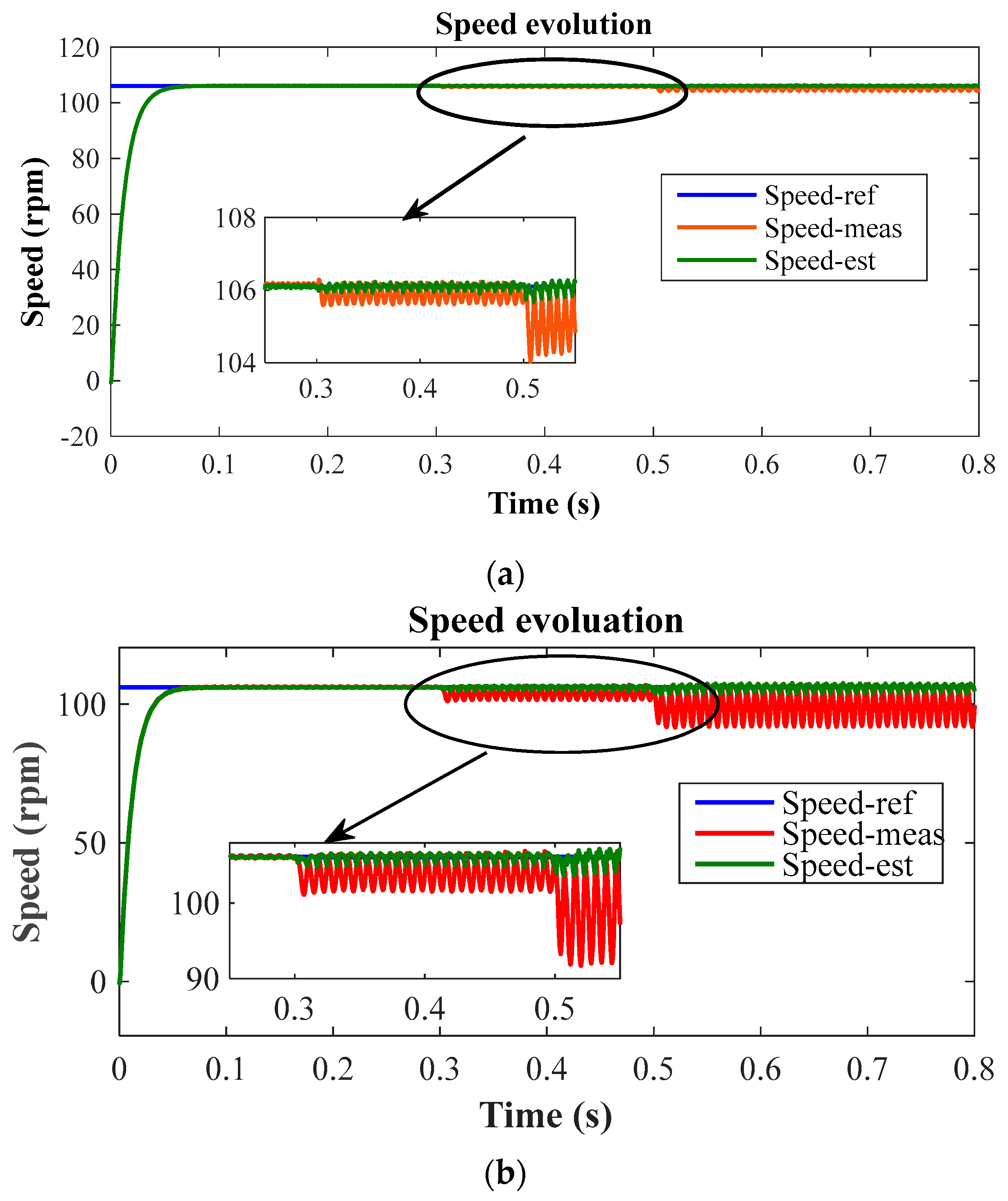
By applying a speed of 104 rpm, the response of the motor’s rotational velocity achieves the desired value in the healthy stage until 0.3 s, when the ITSC fault rate begins at 25%, then increases to 50% at 0.5 s.
Figure 8 shows that this fault results in strong oscillations in the mechanical speed, and it becomes more critical in the case of reduced fault resistance
Rf, causing significant mechanical vibrations.
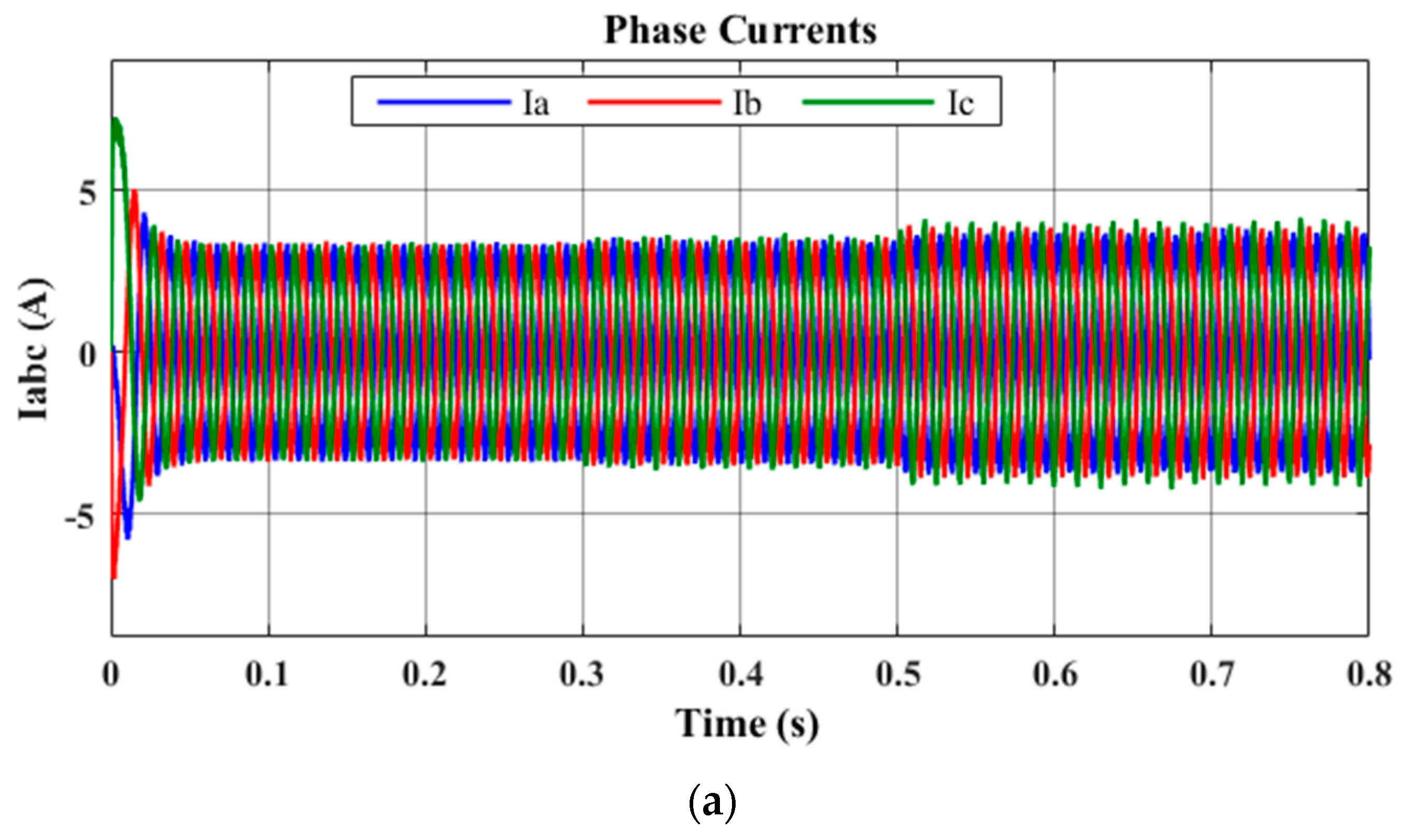
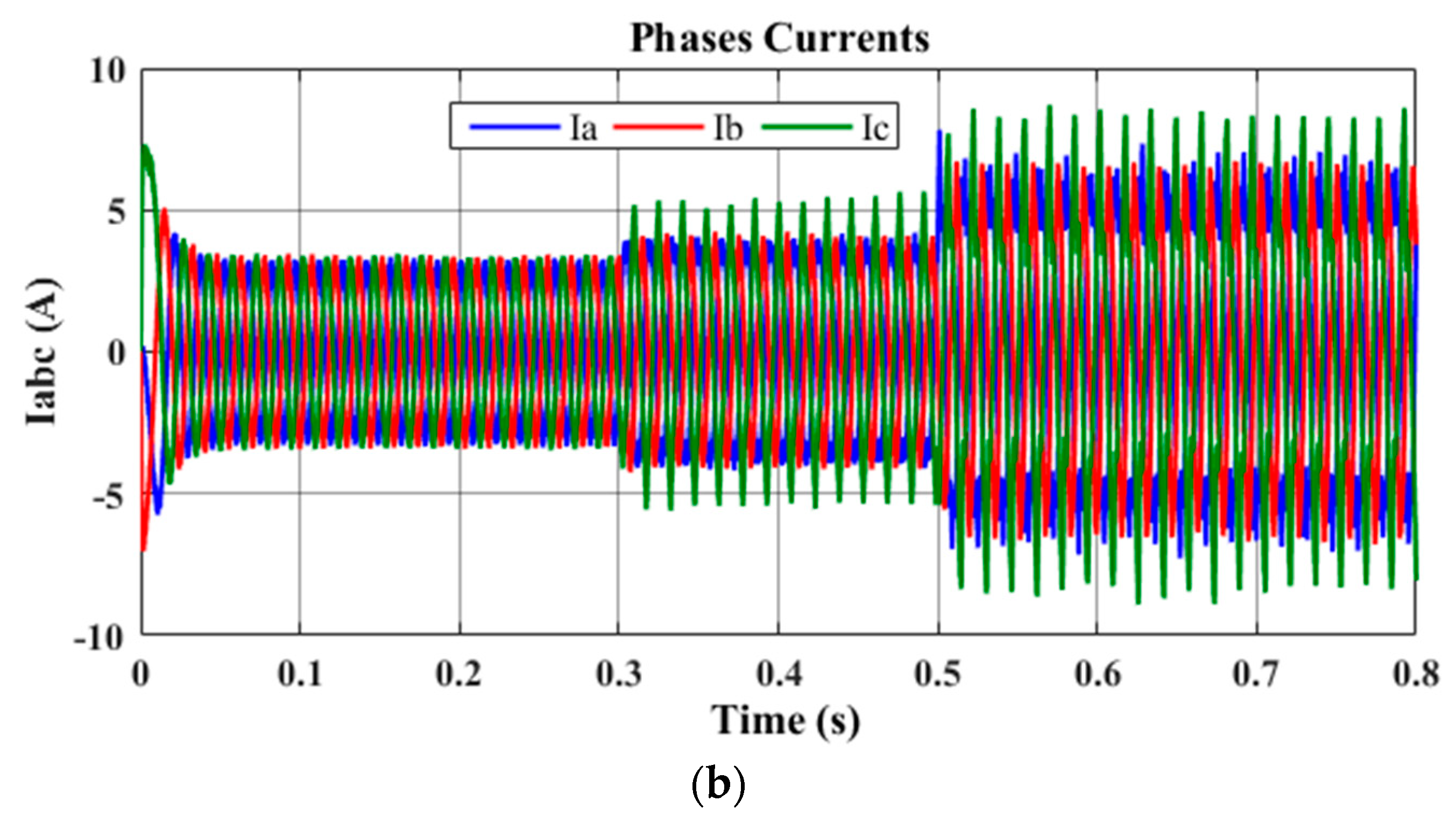
From
Figure 9, it is remarkable to note that the equilibrium of the current phases has been disturbed, and the extent of the current disturbance is contingent upon the resistance fault
Rf, as well as the severity of the fault rate
µ. Additionally, the form of the observed currents is distorted.
During the healthy stage, the stator currents stabilize in the form of balanced sine waves with a constant amplitude of 12 A.
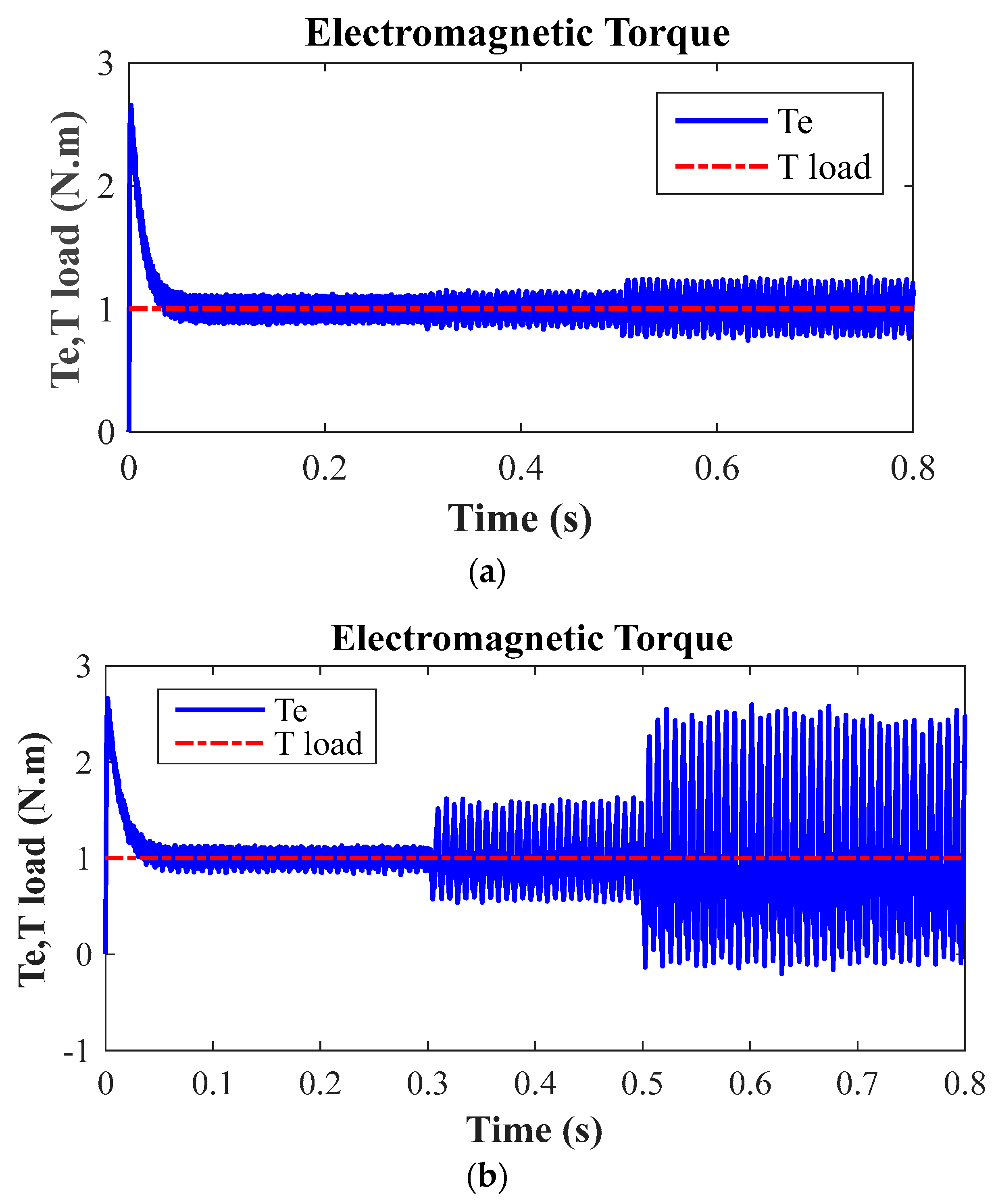
Details concerning the electromagnetic torque and the load torque are shown in
Figure 10. We can clearly observe that during the acceleration, the electromagnetic torque reaches 2.6 N∙m in the motor’s healthy state configuration. In the presence of a heightened fault rate percentage, there is an observable amplification of the electromagnetic torque, along with a decrease in stator resistance. Ripples in the torque waveform are also noticed, which damage the machine and disrupt its operation.
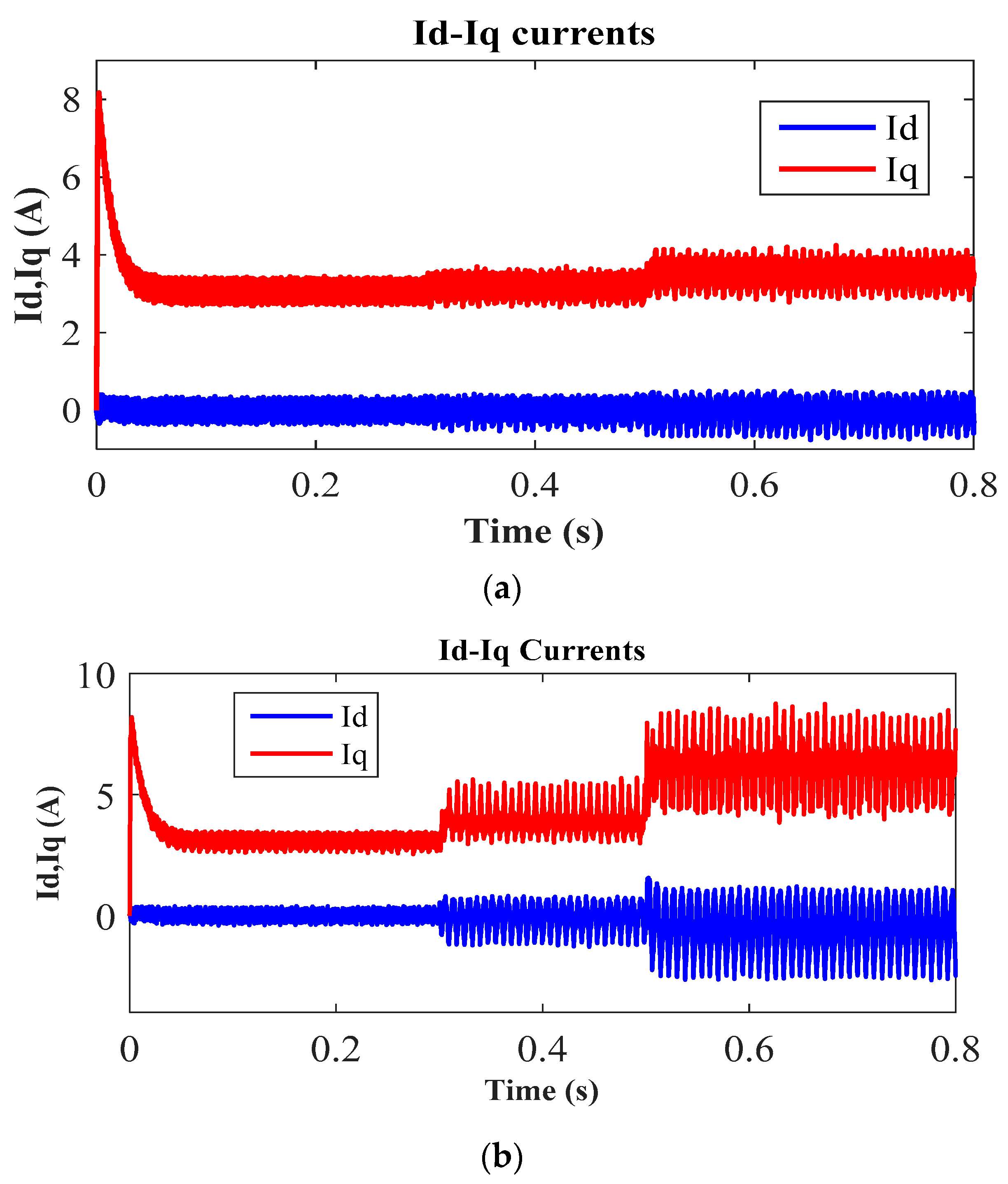
The impact of the ripples on the d-q axis stator currents is illustrated in
Figure 11.
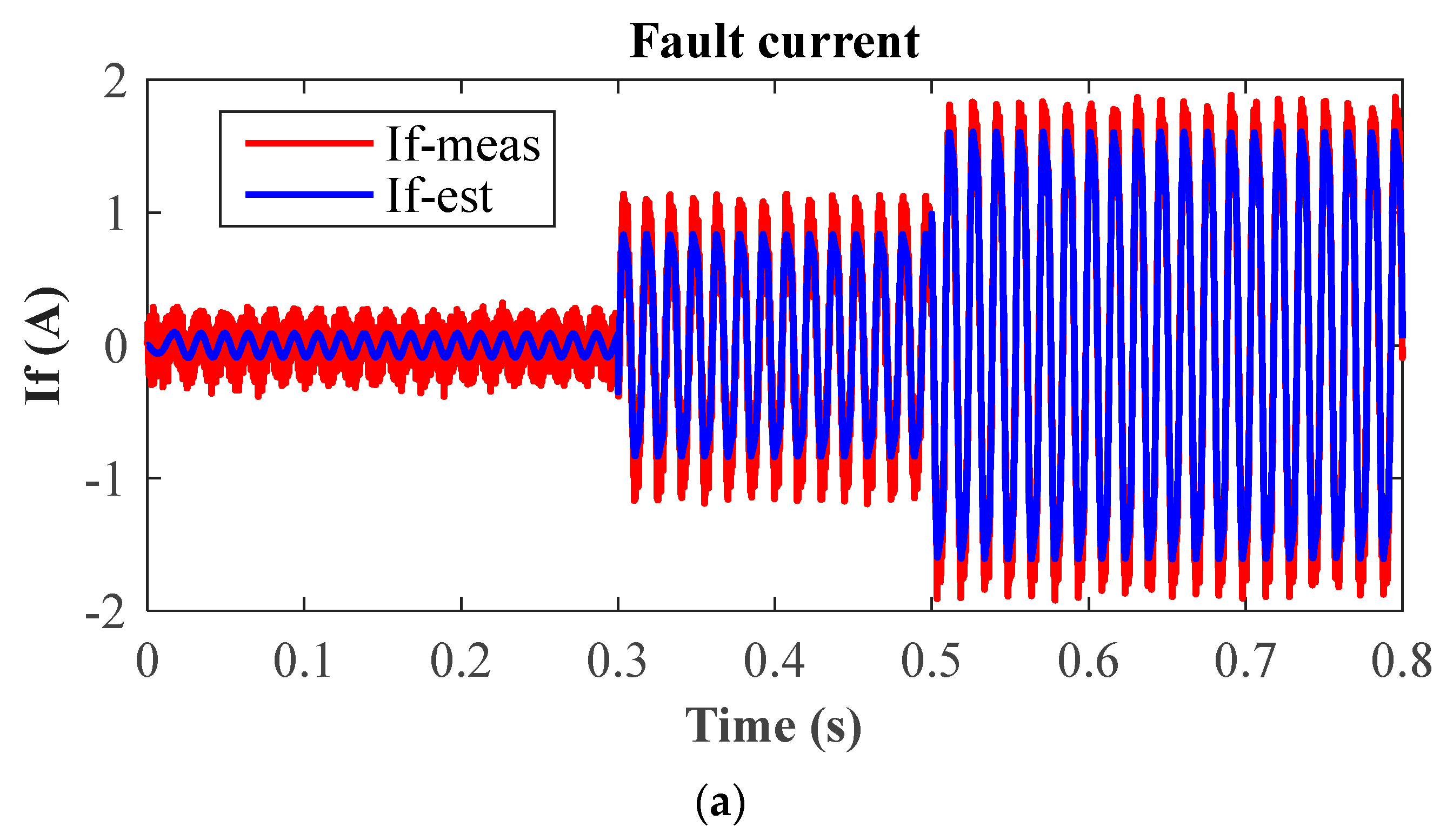
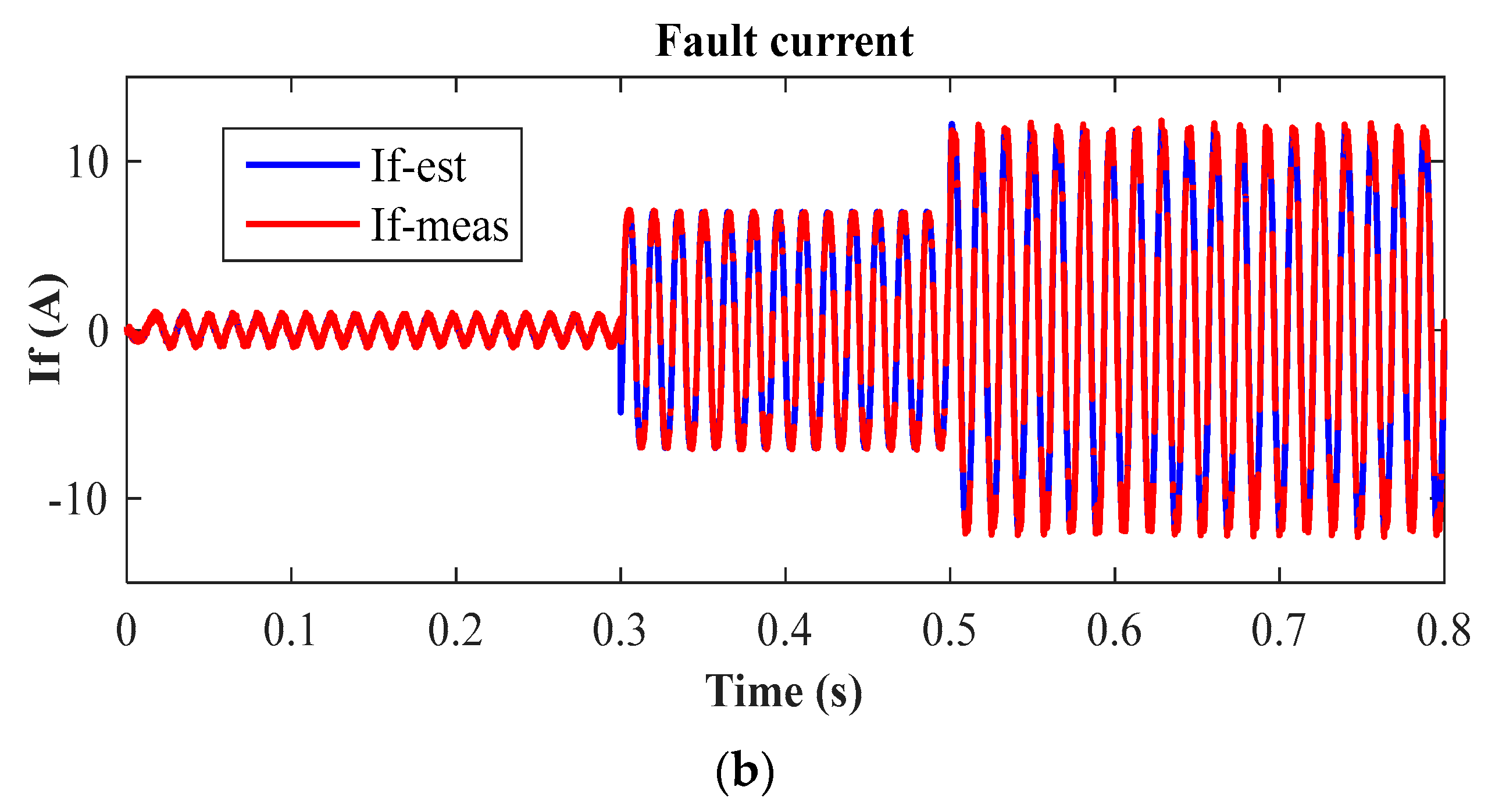
The fault current and its estimated value in
Figure 12 are ideally aligned and harmoniously correspond with each other. Before ITSC fault injection (in the healthy state), the fault current exhibits oscillations approximately centered around zero, with a relatively small magnitude. When the fault severity increases, there is a lack of consistency in of the short circuit current amplitude, which peaks at 12.8 A in
Figure 12b. This may lead to the occurrence of elevated temperatures within the area encountering the ITSC fault. Therefore, the machine’s performance will decrease.
Table 4 presents a comprehensive overview of the measurements obtained for the defective electrical current under varying conditions, thus suggesting the relevance of this behavior in facilitating the identification of faults.
The proposed method demonstrates optimal precision and high accuracy in cases of severe and extremely severe fault degrees, where detecting changes in the PMSM’s behavior is more straightforward. However, under conditions of mild to moderate fault degrees, the estimation error increases.
The calculation of the precision error percentage using the Mean Percentage Error (MPE) method yields a value of approximately 6.07 × 10−6. Additionally, employing the Root Mean Squared Error (RMSE) method results in an error value of approximately 1.38 × 10−6 A. Despite this slight increase in error magnitude, the value remains consistently minimal, which substantiates the effectiveness of our method.
4.2. Fast Fourier Transform FFT Analysis Verification
According to the literature, the Fast Fourier Transform (FFT) is employed in the analysis of the frequency spectrum derived from the current or voltage signal of permanent magnet synchronous motors (PMSM) to identify faults occurring in the stator winding. Any deviations or abnormalities in the amplitude and phase of certain frequency components comparing the observed spectrum with the expected spectrum of a healthy motor are a signification of an ITSC fault in the stator winding [
37]. It is necessary to consider the degree of damage incurred by ITSC; specifically, this damage has a direct effect on the amplitude of frequencies that are odd multiples of the fundamental frequency of the supply voltage [
36].
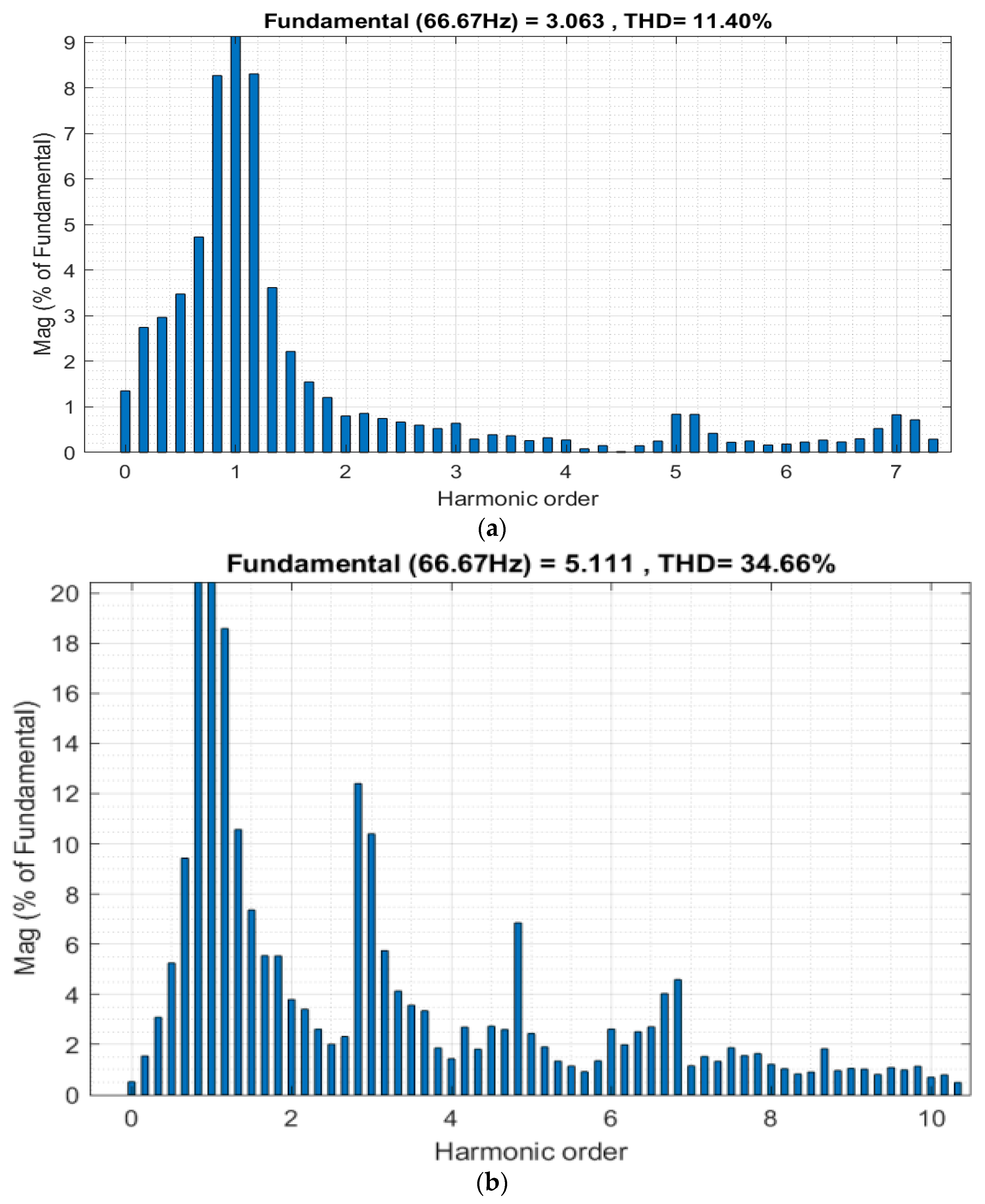
The graphical presentation in
Figure 13a depicts the obtained simulation results, illustrating a distinct frequency at 66.67 Hz in the normal operational state, which corresponds to the fundamental frequency of the motor. Despite that, when an inter-turn short circuits fault is present with 40% severity, as shown in
Figure 13b, additional frequencies become evident at the 3rd, 5th and 7th harmonics, which correspond to 200 Hz, 333.35 Hz and 466.69 Hz, respectively. These odd harmonics emerge subsequent to the occurrence of the short-circuit fault between the stator sub-windings.
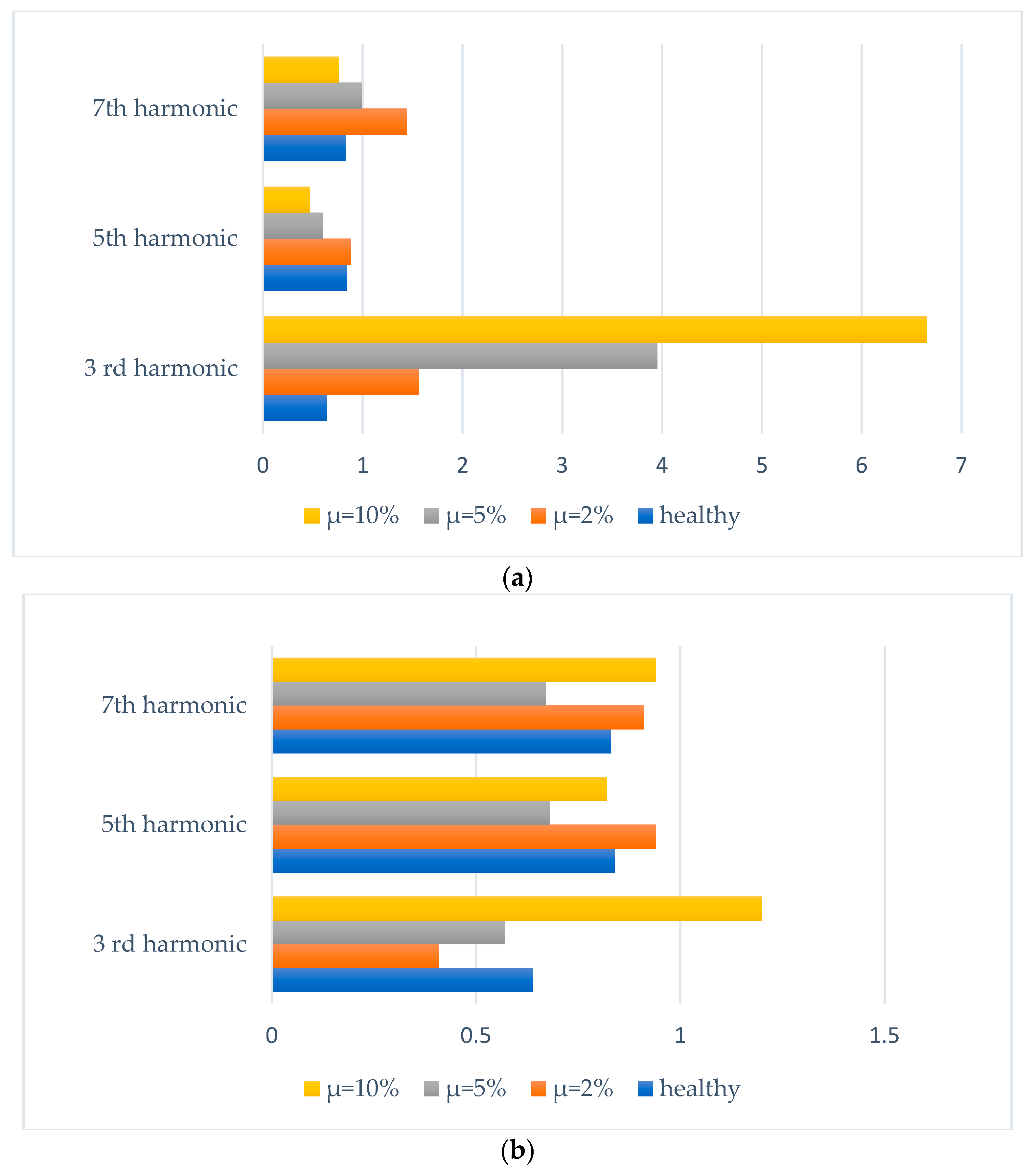
To gain a deeper understanding of the correlation between resistance faults and fault severity degrees depending on the amplitude of the harmonic, we conducted a comprehensive evaluation encompassing various combinations of these parameters.
The findings presented in
Figure 14 demonstrate that the odd harmonic amplitude in situations of faulty conditions exhibits a direct relationship with the fault resistance
Rf. Moreover, it demonstrates an inverse relationship with both the severity of the fault and the number of turns within the stator sub-winding
Nf.
Accordingly, the THD (Total Harmonic Distortion) percentage in
Figure 15, which is 11.40% in the healthy state, is increased compared to the faulty state, notably in the severest state, where it reaches 11.93%. Hence, the dimensions of these entities can potentially be used as a method for detecting and analyzing ITSC faults.
4.3. Comparative Analysis
As the proposed method combines both analytical and intelligent techniques, we have decided to compare it with a purely analytic method and a purely intelligent method to demonstrate the benefits of leveraging each approach. By conducting this comparison, we aim to illustrate how our method effectively capitalizes on the advantages offered by both types of methodologies, resulting in a more robust and comprehensive fault detection solution.
The paper referenced as [
26] employs the convolution Extended Kalman Filter (EKF) for stator current phase and stator resistance estimation. However, this approach exhibits only mediocre performance, particularly in stator estimation, when compared to our proposed method.
In the study referred to as [
36], the CNN-based system directly analyzes the phase current signals, leading to a notable enhancement in fault detection precision. Additionally, the incorporation of DNNs contributes to a partial reduction in computational complexity, although it remains comparatively more complex than the Fuzzy Logic (FL) method.
In the work described in reference [
23], where Artificial Neural Networks (ANNs), Particle Swarm Optimization (PSO), and Extended Kalman Filter (EKF) algorithms are employed, it is crucial to acknowledge that these techniques can introduce computational complexity when compared to the proposed method. Moreover, the inclusion of real-time optimization and online training further adds to the intricacy of the approach.
Table 5 provides a summary of the preceding comparison, aiming to assess the effectiveness of the proposed method.
To conclude, the outcomes of our approach’s simulations are highly pleasing, as demonstrated through a thorough comparison with the aforementioned, widely recognized techniques delineated in the literature and authenticated experimentally by their respective originators.
5. Conclusions
The inter-turn short circuit fault in the stator phase of the permanent magnet synchronous motor (PMSM) intended for electric vehicles is the flaw that is being examined in this study. The mathematical modeling of the motor with an ITSC fault in the A stator phase is carried out using MATLAB. During the initial stage of the proposed approach, the stator resistance is estimated by a fuzzy logic estimator, and then the online detection procedure is continued by the EKF observer in both the machine’s healthy and malfunctioning states. The perceptibility of the ITSC fault features by this approach is used in fault detection. Moreover, FFT analysis is utilized to ensure the occurrence of an inter-turn short circuit fault within the stator phase, and the results show an assertion of a direct correlation between the odd harmonic amplitude and the presence of the ITSC fault in the stator phase.
The findings demonstrate that employing Fuzzy logic for stator resistance estimation yields a highly accurate value in comparison to the measured value. This, in turn, enhances the precision of Extended Kalman Filter (EKF) estimation.
The simulation outcomes demonstrate the resilience of the proposed approach, particularly in severe inter-turn short-circuit scenarios with low-value error estimation. Notably, the enhancement achieved by incorporating the FL estimator into the EKF framework results in superior precision in fault detection compared to the conventional EKF. Furthermore, from a computational complexity perspective, the proposed method exhibits relatively lower complexity compared to neural networks, which necessitate multiple layers of nodes (neurons) and substantial datasets.
Overall, inter-turn short circuit fault detection accuracy and sensitivity have significantly improved in PMSMs by combining stator resistance estimates utilizing Fuzzy Logic and the extended Kalman Filter. The future prospects of our research endeavors encompass several key objectives:
Establishing analytical expressions for a sophisticated Surface-Mounted Permanent Magnet (SPM) Rotor model with multiple slots per pole and per phase, enhancing fault detection circuits;
Incorporating saturation effects and mechanical faults in the PMSM modeling process to achieve a comprehensive understanding of the machine’s behavior under varying conditions;
Developing an isolation solution for Inter-Turn Short Circuit (ITSC) detection to transform the detection approach into a fault-tolerant mechanism, improving overall system reliability and performance;









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}