


An Intelligent Detection Method for Approach Distances of Large Construction Equipment in Substations

Abstract
:1. Introduction
- (1)
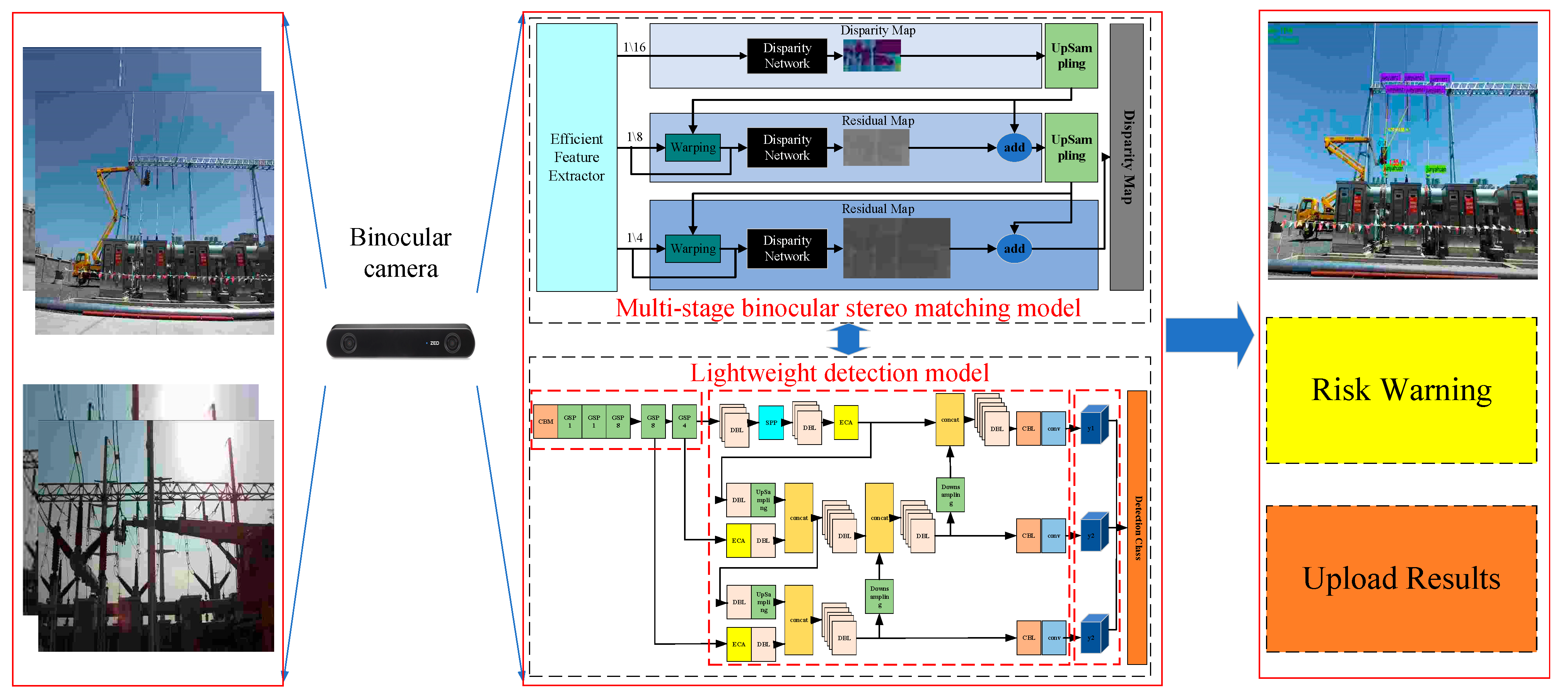
- A framework for the safe distance detection of large construction equipment in substations based on stereo vision and object detection is constructed, and a lightweight collaborative detection model for the safe approach distance of large construction equipment based on stereo matching and object detection is proposed to quickly and accurately detect the distance between large construction equipment and electrical equipment in substations, and improve the efficiency of substation construction equipment control.
- (2)
- The GhostNet-based substation construction lightweight detection method can improve detection speed and accuracy by introducing a GhostNet lightweight feature extraction module and ECANet attention module, especially for substation construction scene images with complex backgrounds and a large number of equipment types.
- (3)
- The channel attention-based lightweight stereo matching model, which is based on a multi-stage binocular stereo matching model, is able to adapt to the complex and changing environment of substation construction by introducing the ECANet attention module, which enables the real-time acquisition of high-precision 3D spatial information.
- (4)
- By comparing with traditional power distance detection methods, the superiority of the proposed method for detecting the safe approach distance between large construction equipment and power equipment in substations is verified.
2. A Framework for the Safe Approach Distance Detection of Large Construction Equipment in Substations Based on Stereo Vision and Object Detection
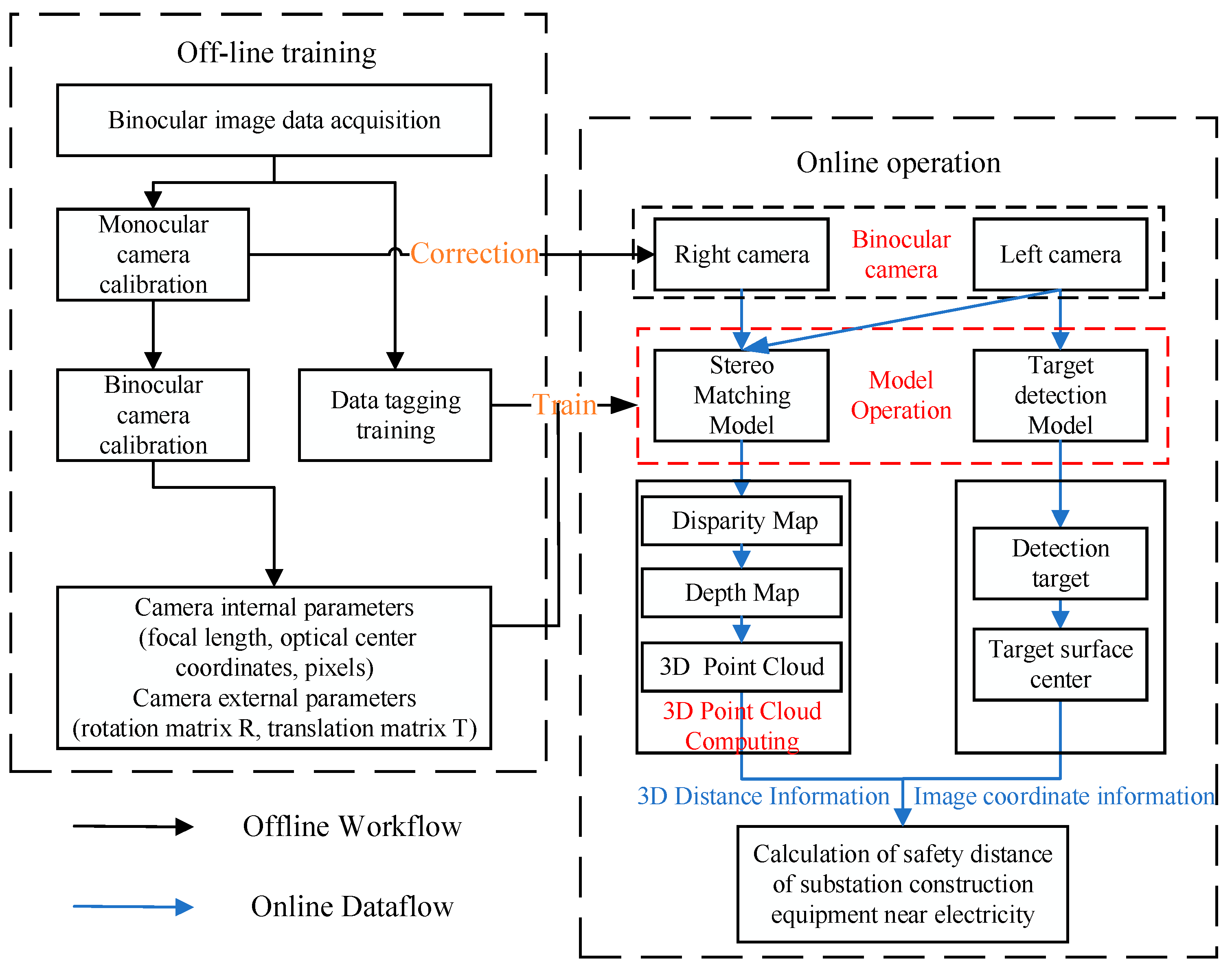
2.1. Method Architecture
2.2. Method Flow
3. Lightweight Collaborative Detection Model for the Safe Approach Distance of Large Construction Equipment Based on Object Detection and Stereo Matching
3.1. GhostNet-Based Substation Construction Lightweight Detection Model
3.1.1. YOLOv4 Algorithm
- (1)
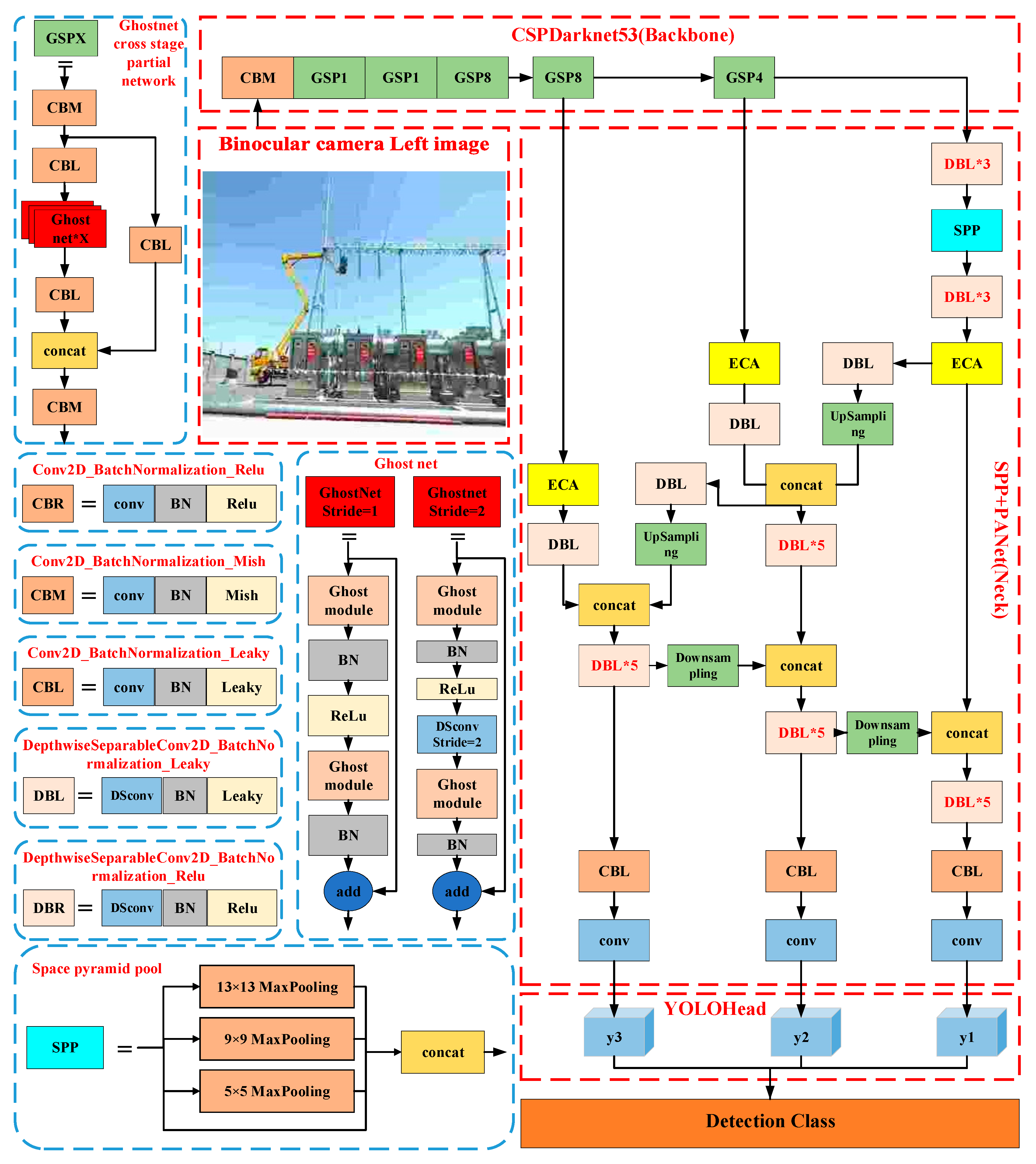
- The feature extraction backbone network uses the CSPDarkNet53 [32] based on the residual structure. This structure balances the level of network computation in each layer, increases the depth of information propagation, enhances the learning ability of the convolutional network, and improves the accuracy of network feature extraction.
- (2)
- The neck network uses spatial pyramid pooling (SPP) [33] and the path aggregation network (PANet) [34]. The SPP module performs a multi-scale maximum pooling operation and links the feature maps as output to extract key contextual features. The PANet structure adds a bottom-up feature propagation path based on the feature pyramid network structure, making it easier for shallow features to propagate to deeper layers of the network to achieve the target localization function.
- (3)
- The head network utilizes the Complete IoU (CIoU) algorithm to obtain a more stable detection frame, and the best predicted frame is retained by a non-extreme suppression algorithm.
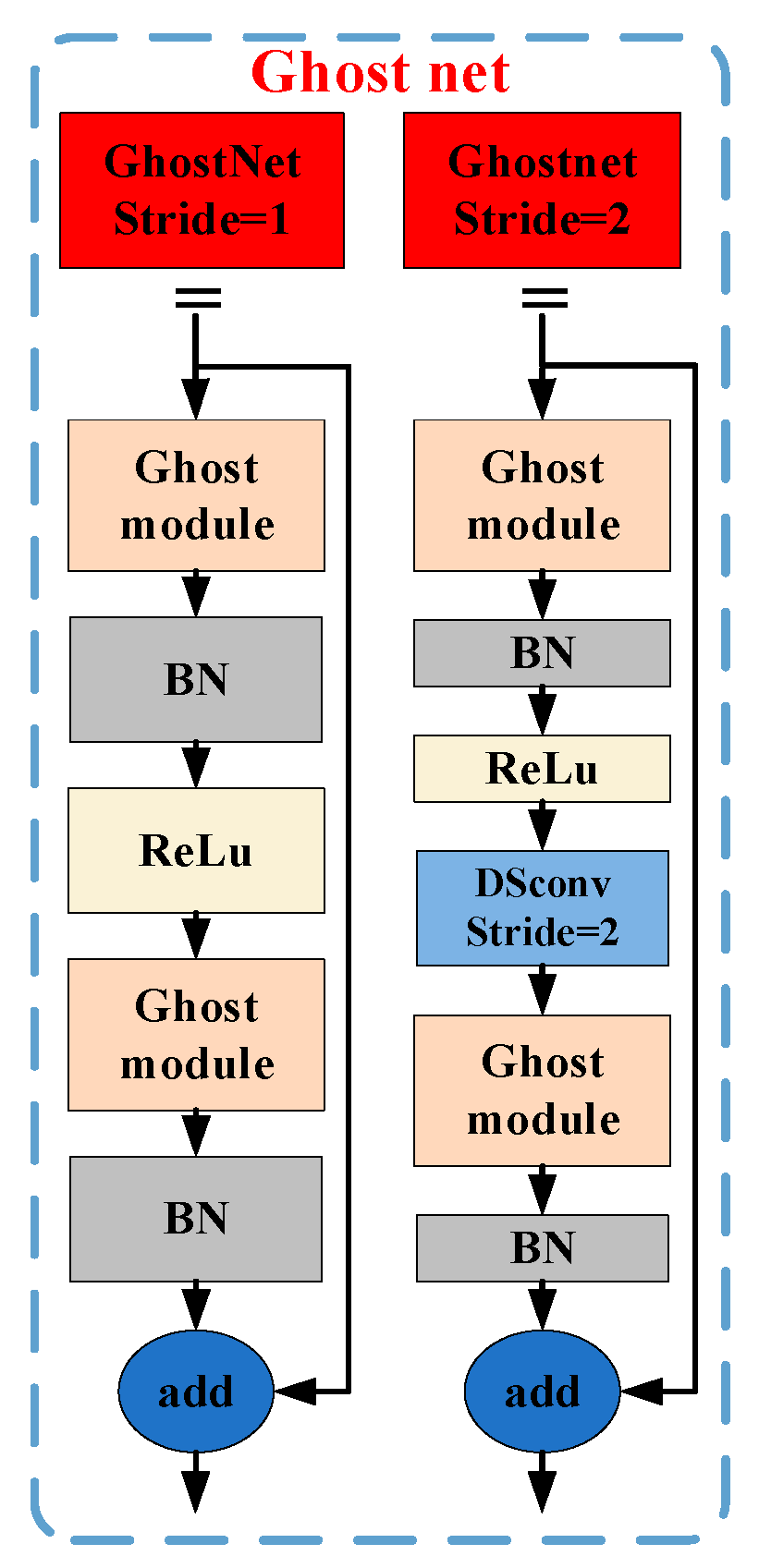
3.1.2. GhostNet-Based Lightweight Feature Extraction Network
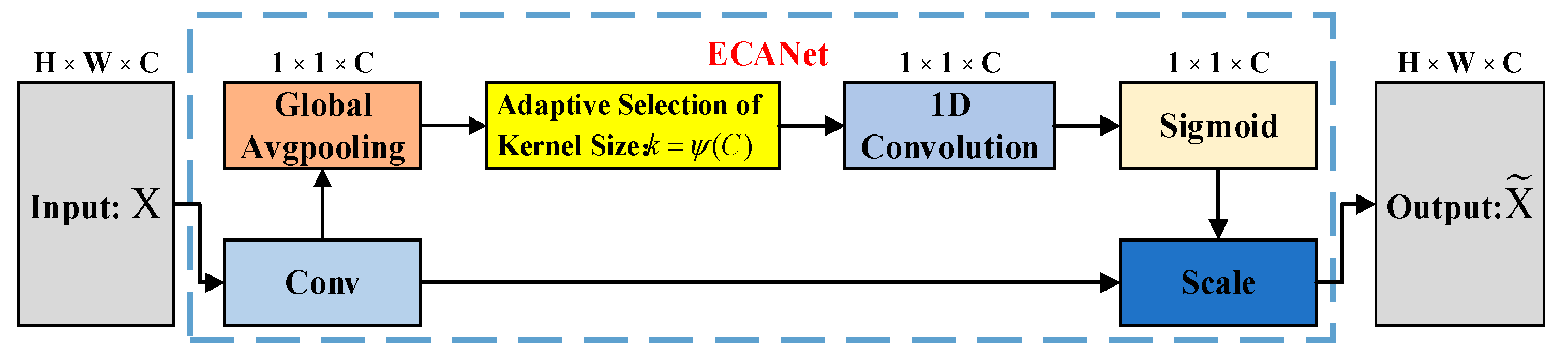
3.1.3. ECANet-Based Fusion Network for Feature Extraction
3.2. Lightweight Stereo Matching Model Based on Channel Attention
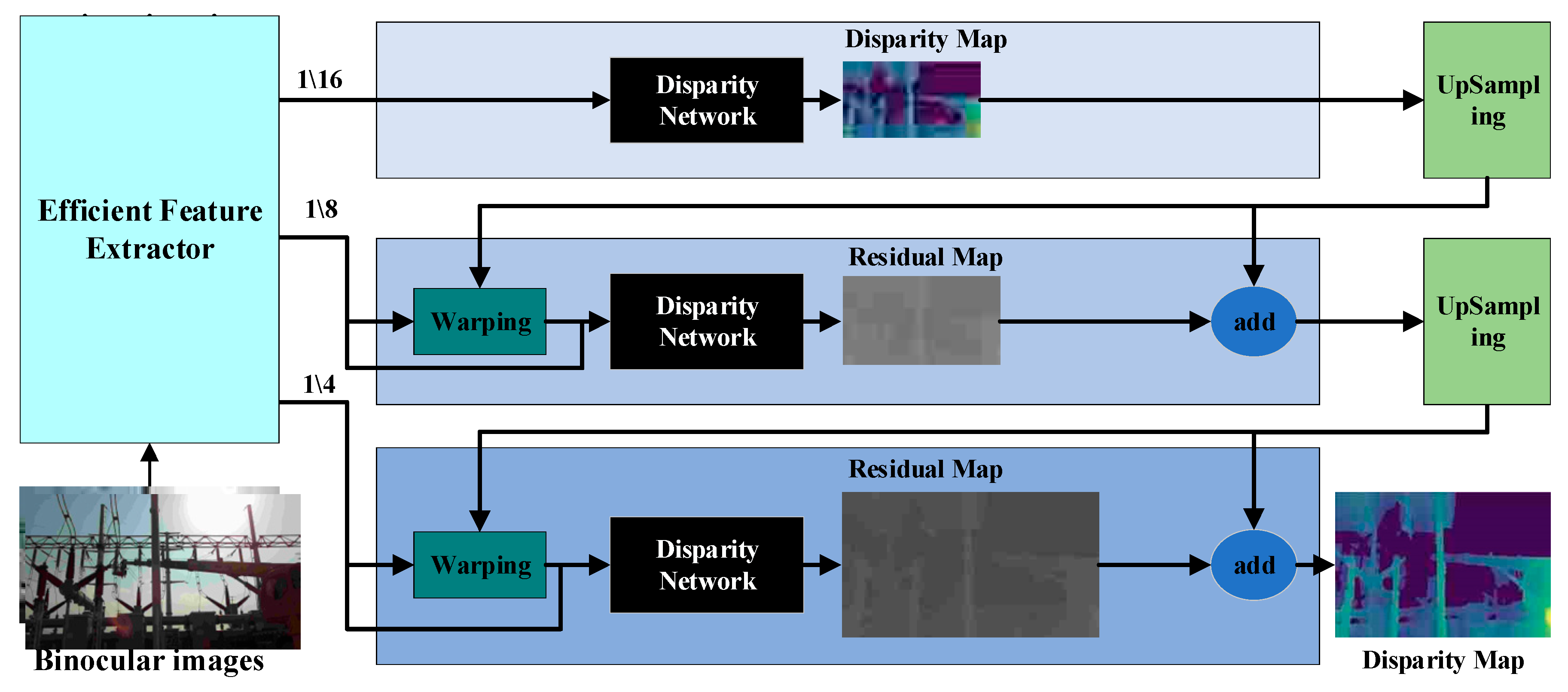
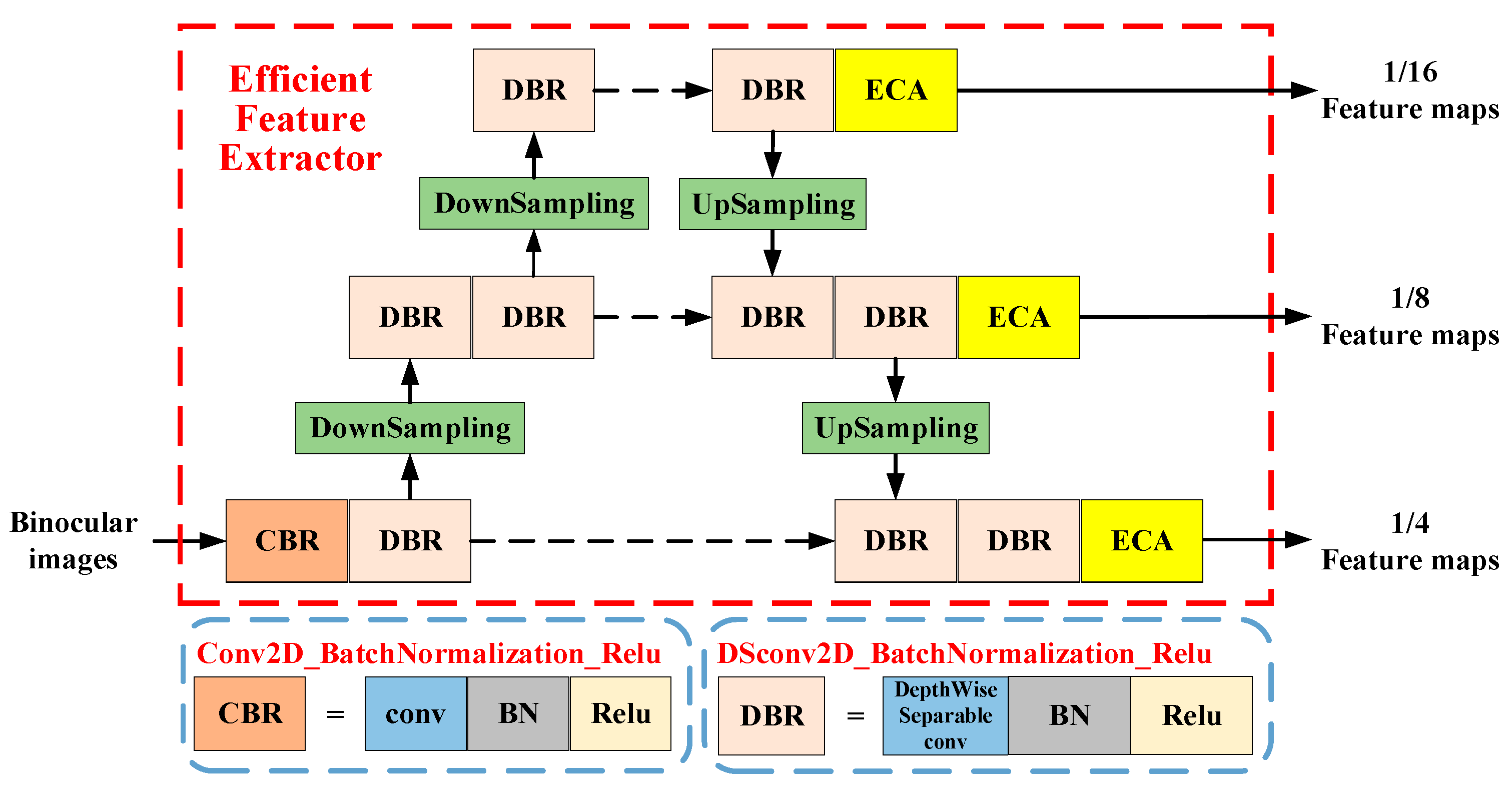
3.2.1. Efficient Feature Extraction Network
3.2.2. Efficient Feature Extraction Network
3.2.3. D Point Cloud Computing
3.3. Calculation of Distance between Large Construction Apparatus and Electrical Equipment
4. Experimental Results and Analysis
4.1. Description of Experimental Data
4.2. Description of Experimental Data
4.3. Performance Analysis of GhostNet-Based Substation Construction Lightweight Detection Model
4.3.1. Quantitative Analysis of the Dataset Test Results
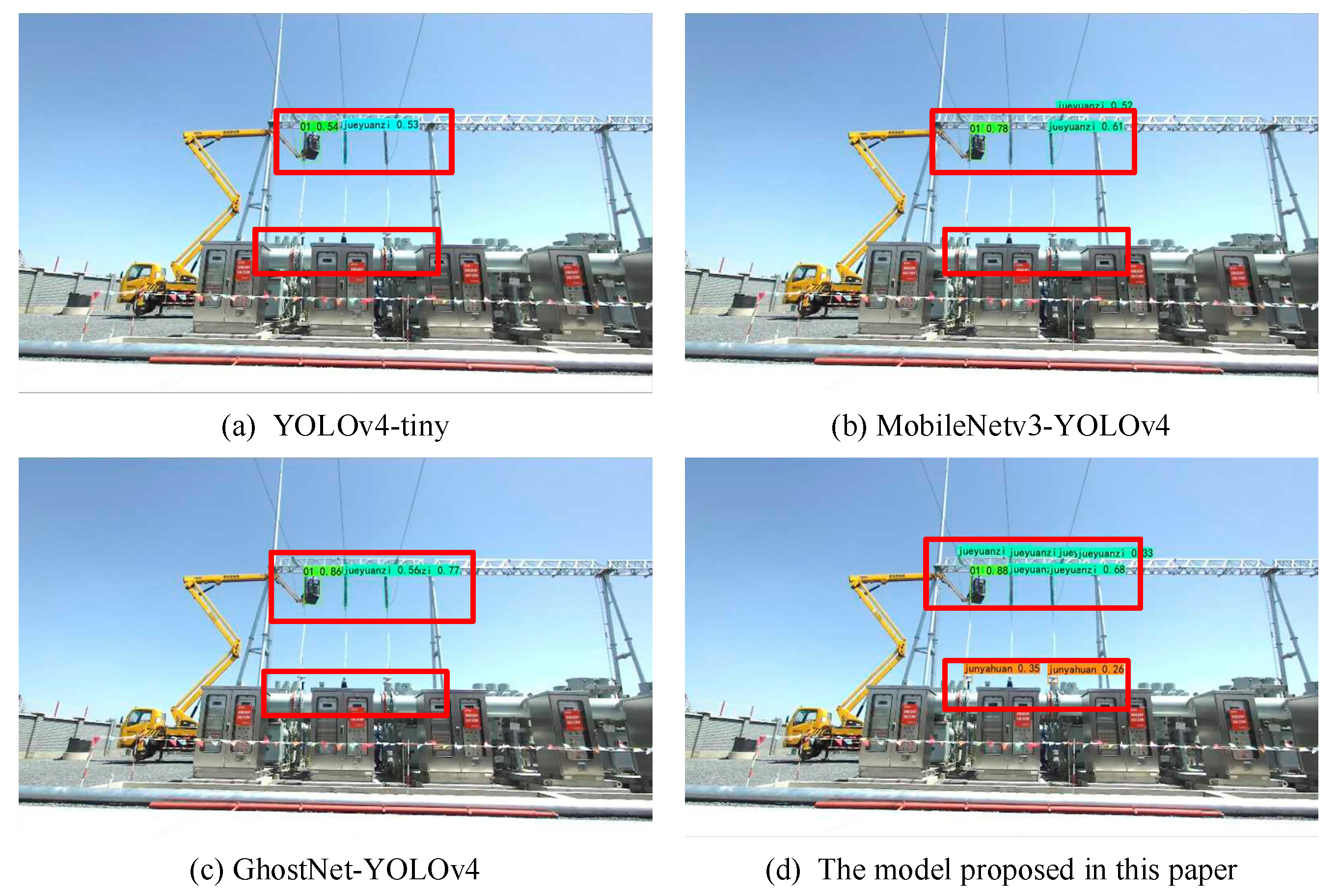
4.3.2. Qualitative Analysis of the Dataset Test Results
4.4. Performance Analysis of Lightweight Stereo Matching Models Based on Channel Attention
4.4.1. Quantitative Analysis of the Dataset Test Results
4.4.2. Quantitative Analysis of the Dataset Test Results
4.5. Performance Analysis of a Lightweight Collaborative Detection Model for the Safe Approach Distance of Large Construction Equipment Based on Stereo Matching and Target Detection
5. Conclusions and Outlook
- (1)
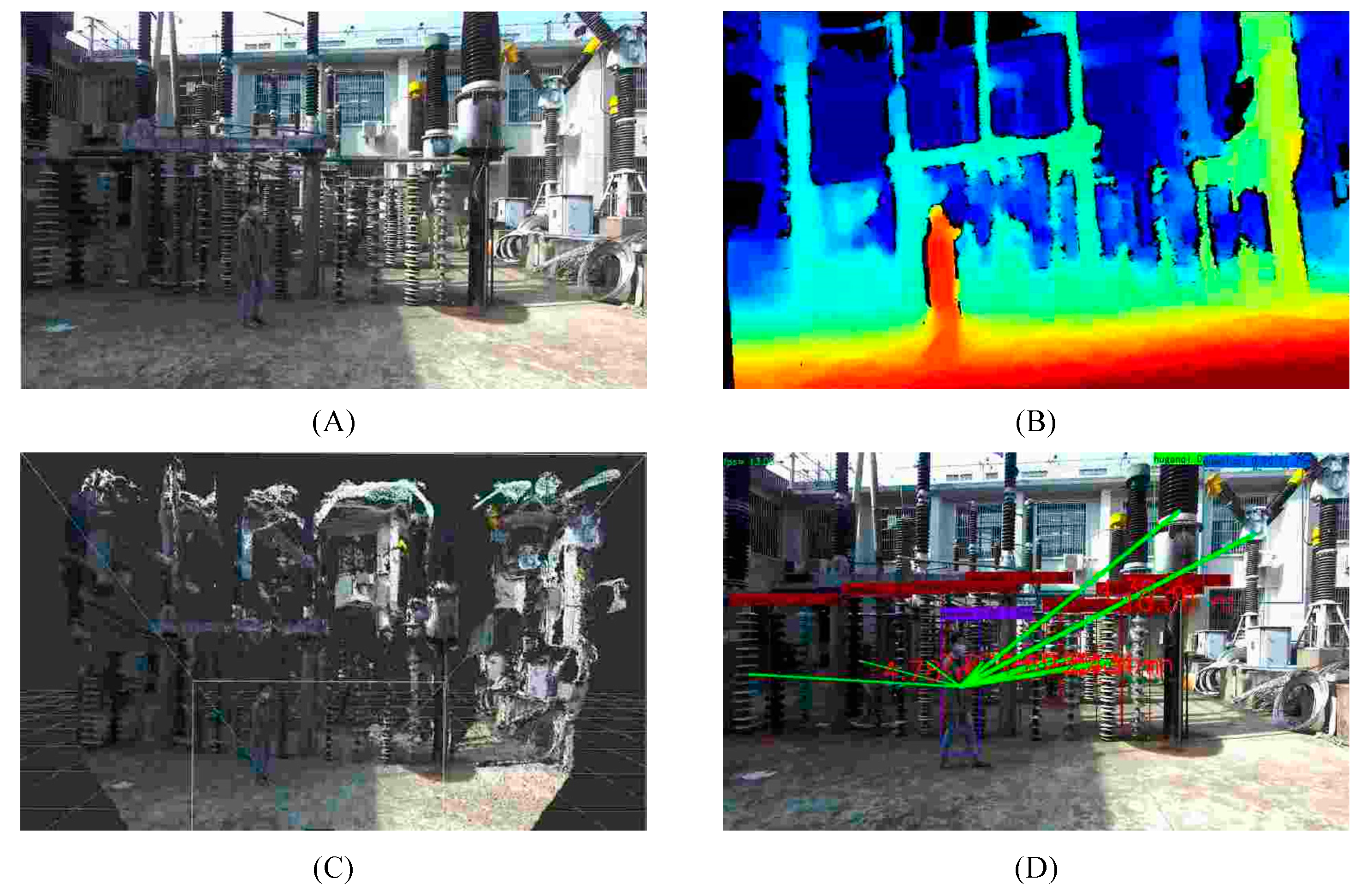
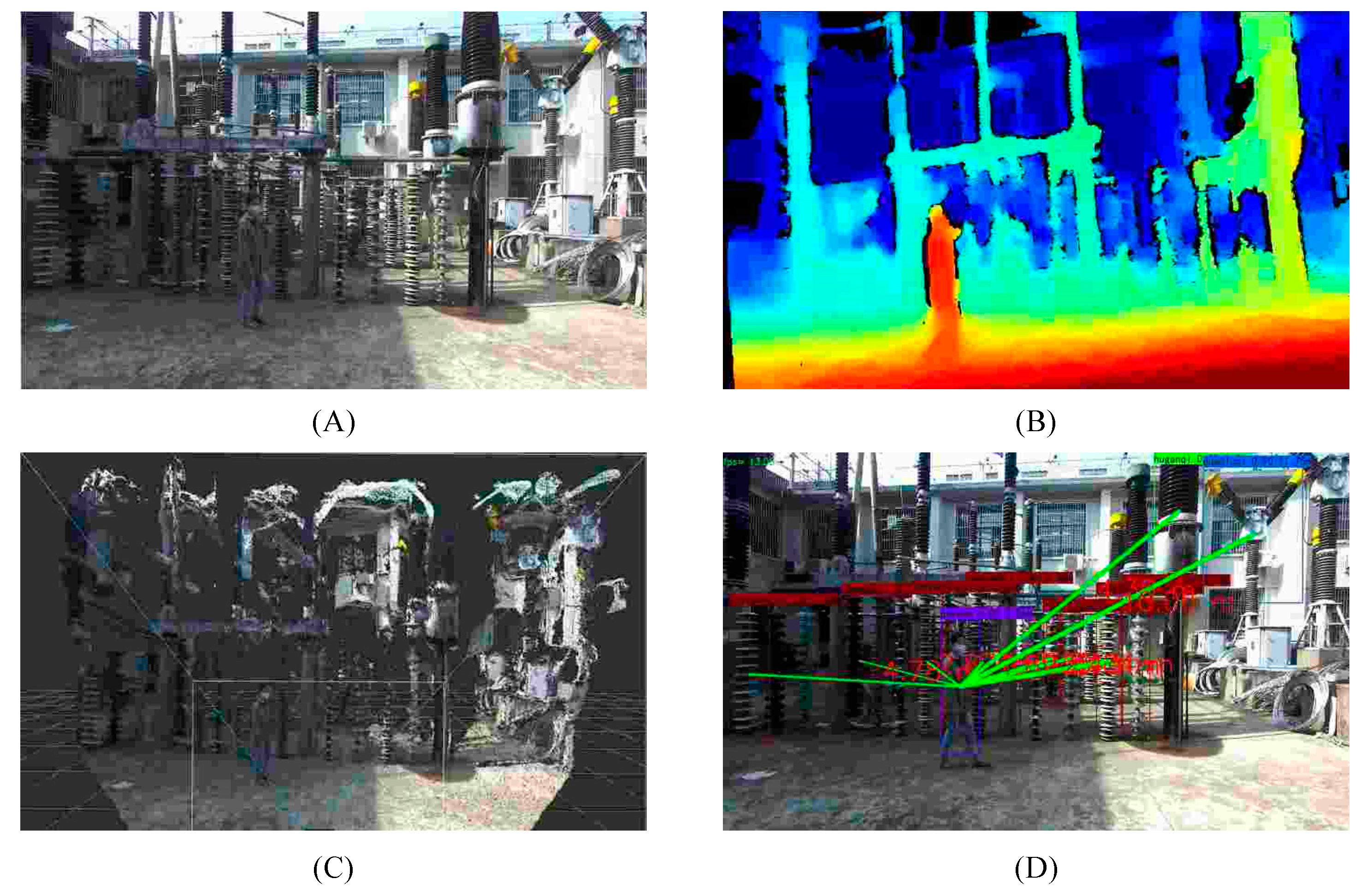
- A lightweight collaborative detection model for the safe approach distance of large construction equipment based on stereo vision and target detection is established. The method realizes the recognition of power equipment and construction vehicles through the object detection model, and converts the stereo-matching-model-perceived disparity data into 3D point cloud data to realize the object localization. The method intelligently distinguishes and localizes power equipment and construction vehicles in real time, thus calculating a safe approach distance for construction vehicles.
- (2)
- The test results show that the GhostNet module can effectively reduce the computational complexity and improve the computational speed, and the ECANet module can effectively improve the feature extraction ability of the model, both of which can effectively improve the detection performance of the model, and it is suitable for the safety distance detection of substation construction vehicles.
- (3)
- For the dataset, after comparing the performance analysis of different models, a GhostNet-based substation construction lightweight detection model had a higher detection performance (detection speed was 31.351 frames per second, mAP was 92.16%, the recall rate was 90.37%). A lightweight stereo-matching model based on channel attention likewise had a better detection performance (detection speed of 24.701 frames per second, EPE of 2.29 pixels, 3 px error of 3.48%).
- (4)
- The results show that a lightweight collaborative detection model has been proposed for the safe detection of approach distances for large construction equipment with a good detection effect, and is jointly composed of the target detection and stereo matching models proposed in this paper. The detection speed of this method is 19.35 frames per second, with an average relative error of only 3.802%.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, Q. Technical Manual of Lifting and Transportation Construction for Power Transmission and Transformation Projects; China Electric Power Press: Beijing, China, 2012. [Google Scholar]
- Ma, H.; Wang, B.; Gao, W.; Liu, D.C.; Li, Z.Y.; Liu, Z.J. Optimization Strategy for Frequency Regulation Service of Regional Integrated Energy Systems Considering Compensation Effect of Frequency Regulation. Autom. Electr. Power Syst. 2018, 42, 127–135. [Google Scholar]
- Zhang, Y.; Li, H.; Liu, Y.; Wang, Y.; Pan, Z.; Zheng, X.; Jiang, Y.; Liu, J.; Li, A.; Jing, H. A Power Operation Site Safety Assistant System Based on Convolutional Neural Network. IOP Conf. Ser. Earth Environ. Sci. 2019, 358, 42–52. [Google Scholar] [CrossRef]
- Ma, F.; Wang, B.; Dong, X.; Yao, L.; Wang, H. Safety image interpretation of power industry: Basic concepts and technical framework. Proc. CSEE 2022, 42, 458–475. [Google Scholar]
- State Grid Corporation of China. Electricity Supply Enterprise Operation Safety Risk Identification and Prevention Manual; China Electric Power Press: Beijing, China, 2008. [Google Scholar]
- Li, X.; Chen, Z. Design and Application of Monitoring System of Remote Video and Environment to Smart Substations. Appl. Mech. Mater. 2018, 496–500, 1634–1637. [Google Scholar] [CrossRef]
- Zhou, Q.; He, W.; Li, S. Research on the group-type of high voltage electric field measurement safety distance caution apparatus. Int. J. Grid Distrib. Comput. 2016, 9, 109–120. [Google Scholar] [CrossRef]
- Fan, J.; Zhang, M.; Deng, Q.R.; Xin, Y.N.; Wang, L.Y.; Zheng-Hao, H.E.; Bureau, G. Design and Calculation of DC High Voltage Safety Distance Warning System Based on Electric Field Measurement. Water Resour. Power 2017, 35, 183–185+161. [Google Scholar]
- Du, X.; Xie, Q.; He, X. Design and Experiment of Multi-electrode Electric Field Vector Sensor System for Electric Early Warning. Yunnan Electr. Power 2023, 51, 33–36+40. [Google Scholar]
- Zhang, B.; He, Y.; Cheng, J. Safety Control System of Hoisting Operation Based on UWB and Visual Information. Instrum. Tech. Sens. 2021, 10, 98–102+114. [Google Scholar]
- Liu, Y.; Li, X.; Luo, X.; Huang, S.; Li, L.; He, X. Development of a positioning device suitable for electric power workers and vehicle management. J. Jiangxi Vocat. Tech. Coll. Electr. 2021, 34, 8–10. [Google Scholar]
- Li, X.; Zhang, J.; Zhang, L.; Luo, X. Research and Application of Substation Operation Safety Management and Control System Based on Three-dimensional Modeling and Composite Positioning. In Proceedings of the 2022 5th International Conference on Intelligent Robotics and Control Engineering (IRCE), Tianjin, China, 23–25 September 2022; pp. 13–19. [Google Scholar]
- Liu, Z.; Miao, X.; Chen, J.; Jiang, H. Review of visible image intelligent processing for transmission line inspection. Power Syst. Technol. 2020, 44, 1057–1069. [Google Scholar]
- Takouhi, O. Approaches for Stereo Matching. Model. Identif. Control. 1995, 16, 65–94. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, B.; Ma, F.; Luo, P.; Zhang, J.; Li, Y. High-precision Detection Method of Irregular Outer Surface Defects of Power Equipment Based on Domain Adaptation Network. High Volt. Eng. 2022, 48, 4516–4526. [Google Scholar]
- Yin, C.; Zhi, H.; Li, H. Survey of Binocular Stereo-matching Methods Based on Deep Learning. Comput. Eng. 2022, 48, 1–12. [Google Scholar]
- Kobayashi, Y.; Karady, G.G.; Heydt, G.T.; Olsen, R.G. The utilization of satellite images to identify trees endangering transmission lines. IEEE Trans. Power Deliv. 2009, 24, 1703–1709. [Google Scholar] [CrossRef]
- Yu, M.; Li, X. Binocular Visual Recognition Technology for Electric Vehicle Charging Holes Based on SIFT Algorithm. Control. Instrum. Chem. Ind. 2023, 50, 316–322. (In Chinese) [Google Scholar]
- Bai, G.; Zheng, Y.; Wu, K.; Wu, S.; Guo, E.; Zhao, Y.; Shan, X.; Tang, X.; Dong, E. Power line identification and localization method for live Working Robot of Distribution Line. Power Syst. Technol. 2023, 47, 2604–2611. [Google Scholar]
- Marie, H.S.; Abu El-hassan, K.; Almetwally, E.M.; El-Mandouh, M.A. Joint shear strength prediction of beam-column connections using machine learning via experimental results. Case Stud. Constr. Mater. 2023, 17, e01463. [Google Scholar] [CrossRef]
- Zhou, K.; Meng, X.; Cheng, B. Review of Stereo Matching Algorithms Based on Deep Learning. Comput. Intell. Neurosci. 2020, 2020, 8562323. [Google Scholar] [CrossRef]
- Bontar, J.; Lecun, Y. Computing the Stereo Matching Cost with a Convolutional Neural Network. IEEE Comput. Soc. 2014, 7–12, 1592–1599. [Google Scholar]
- Chang, J.; Chen, Y. Pyramid stereo matching network. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar] [CrossRef]
- Lu, C.; Uchiyama, H.; Thomas, D.; Shimada, A.; Taniguchi, R.-I. Sparse Cost Volume for Efficient Stereo Matching. Remote Sens. 2018, 10, 1844. [Google Scholar] [CrossRef]
- Zhao, H.; Zhou, H.; Zhang, Y.; Zhao, Y.; Yang, Y.; Ouyang, T. EAI-Stereo: Error Aware Iterative Network for Stereo Matching. In Proceedings of the ACCV 2022: 16th Asian Conference on Computer Vision, Macau SAR, China, 4–8 December 2022; pp. 3–19. [Google Scholar]
- Wei, Z. Safety Risk Control of Substation Construction Site Hoisting Operation; China Electric Power Press: Beijing, China, 2023. (In Chinese) [Google Scholar]
- Bochkovskiy, A.; Wang, C.; Liao, H. YOLOV4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Wang, Y.; Lai, Z.; Huang, G.; Wang, B.H.; Van Der Maaten, L.; Campbell, M.; Weinberger, K.Q. Anytime stereo image depth estimation on mobile devices. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 5893–5900. [Google Scholar]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. GhostNet: More features from cheap operations. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 1577–1586. [Google Scholar]
- Howard, A.; Sandler, M.; Chu, G.; Chen, L.C.; Chen, B.; Tan, M.; Wang, W.; Zhu, Y.; Pang, R.; Adam, H.; et al. Searching for MobileNetV3. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 1314–1324. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient channel attention for deep convolutional neural networks. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11531–11539. [Google Scholar]
- Wang, C.Y.; Liao HY, M.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W.; Yeh, I.H. CSPNet: A new backbone that can enhance learning capability of CNN. In Proceedings of the 2020 1EEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Seattle, WA, USA, 14–19 June 2020; pp. 1571–1580. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Mayer, N.; Ilg, E.; Hausser, P.; Fischer, P.; Cremers, D.; Dosovitskiy, A.; Brox, T. A large dataset to train convolutional networks for disparity, optical flow, and scene flow estimation. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 4040–4048. [Google Scholar]
- Zhang, Z. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the 17th IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; Volume 1, pp. 666–673. [Google Scholar]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 328–341. [Google Scholar] [CrossRef]
- Zhang, Y.; Fan, Q.; Bao, F.; Liu, Y.; Zhang, C. Single-image super-resolution based on rational fractal interpolation. IEEE Trans. Image Process. 2018, 27, 3782–3797. [Google Scholar] [PubMed]
- Mao, X.; Xing, Y.; Luo, G.; Huang, H.; Dong, L.; Lu, C. Measurement of ice thickness of transmission line based on improved SGBM algorithm. Autom. Instrum. 2021, 11, 23–26+31. (In Chinese) [Google Scholar]
- Chen, C.; Peng, X.; Song, S.; Wang, K.; Yang, B. Safety distance diagnosis of large scale transmission line corridor inspection based on LiDAR point cloud collected with UAV. Power Syst. Technol. 2017, 41, 2723–2730. (In Chinese) [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Calibrated Objects | Left Camera | Right Camera |
|---|---|---|
| Intrinsic matrix | ||
| Distortion parameters | ||
| Rotation matrix R | ||
| Translation matrix T | ||
| Model | YOLOv4-Tiny | MobileNetv3-YOLOv4 | GhostNet-YOLOv4 | The Proposed Model | |||||
|---|---|---|---|---|---|---|---|---|---|
| AP (%) | Recall (%) | AP (%) | Recall (%) | AP (%) | Recall (%) | AP (%) | Recall (%) | ||
| Identification Results (%) | Equalizing ring | 86 | 48.81 | 84 | 69.01 | 87 | 79.98 | 90 | 88.62 |
| Bushing | 79 | 50.20 | 75 | 77.60 | 87 | 61.33 | 92 | 91.95 | |
| Crane | 75 | 64.23 | 79 | 60.14 | 86 | 79.24 | 89 | 91.83 | |
| Isolating switch | 76 | 77.94 | 92 | 76.73 | 92 | 92.31 | 96 | 95.19 | |
| insulator | 85 | 75.78 | 87 | 73.43 | 91 | 85.91 | 91 | 80.97 | |
| Aerial work vehicle | 47 | 46.75 | 72 | 63.43 | 83 | 87.42 | 95 | 93.67 | |
| mAP (%) | 74.67 | 81.50 | 87.67 | 92.16 | |||||
| Mean Recall (%) | 60.62 | 70.05 | 81.01 | 90.37 | |||||
| FPS | 92.913 | 35.349 | 34.182 | 31.351 | |||||
| Model | EPE | 3 px (%) | FPS |
|---|---|---|---|
| SGBM | 20.8 | 30.5 | 0.497 |
| PSMNet | 1.10 | 2.37 | 0.613 |
| AnyNet | 3.48 | 4.69 | 18.692 |
| The model proposed in this paper | 2.29 | 3.48 | 24.701 |
| Test Number | Real Distance/m | Detection Distance/m | Absolute Error/m | Relative Error/% |
|---|---|---|---|---|
| 1 | 15.53 | 16.01 | 0.48 | 3.09 |
| 2 | 24.36 | 23.99 | 0.37 | 1.52 |
| 3 | 31.12 | 33.35 | 2.23 | 7.16 |
| 4 | 19.35 | 18.57 | 0.78 | 4.03 |
| 5 | 26.42 | 25.57 | 0.85 | 3.21 |
| Method | Technical Tools | Mean Absolute Error/m | Mean Relative Error/% | Whether It Can Be Detected in Real Time | Whether to Support Multiple Scenes |
|---|---|---|---|---|---|
| Reference [40] | Stereo matching | 0.005 | 7.91 | No | Yes |
| Reference [41] | LIDAR + 3D reconstruction | 0.0818 | 2.33 | No | No |
| Reference [18] | Stereo matching + object identification | 0.00112 | 5.60 | No | Yes |
| The method proposed in this paper | Stereo matching + object detection | 0.942 | 3.802 | Yes | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Wang, B.; Zhang, J.; Ma, H.; Luo, P.; Yin, T. An Intelligent Detection Method for Approach Distances of Large Construction Equipment in Substations. Electronics 2023, 12, 3510. https://doi.org/10.3390/electronics12163510
Wang L, Wang B, Zhang J, Ma H, Luo P, Yin T. An Intelligent Detection Method for Approach Distances of Large Construction Equipment in Substations. Electronics. 2023; 12(16):3510. https://doi.org/10.3390/electronics12163510
Chicago/Turabian StyleWang, Leixiong, Bo Wang, Jiaxin Zhang, Hengrui Ma, Peng Luo, and Tianrui Yin. 2023. "An Intelligent Detection Method for Approach Distances of Large Construction Equipment in Substations" Electronics 12, no. 16: 3510. https://doi.org/10.3390/electronics12163510
APA StyleWang, L., Wang, B., Zhang, J., Ma, H., Luo, P., & Yin, T. (2023). An Intelligent Detection Method for Approach Distances of Large Construction Equipment in Substations. Electronics, 12(16), 3510. https://doi.org/10.3390/electronics12163510