
Intelligent Recognition of Seismic Station Environmental Interference Based on YOLOv5

Abstract
:1. Introduction
2. Object Recognition and Tracking Algorithm
2.1. Core Algorithm of Object Recognition and Tracking
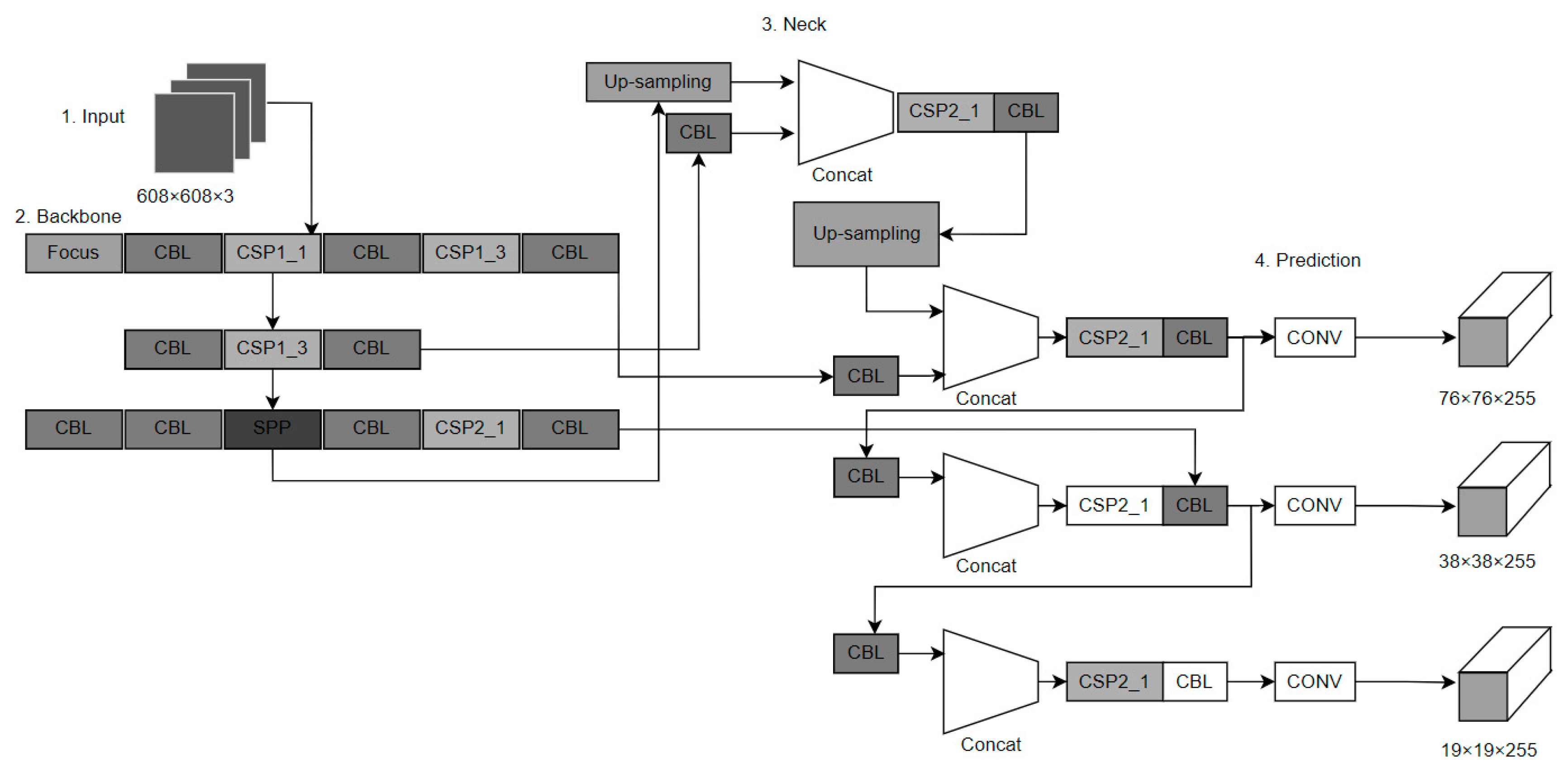
2.1.1. YOLOv5
2.1.2. Centroid Matching
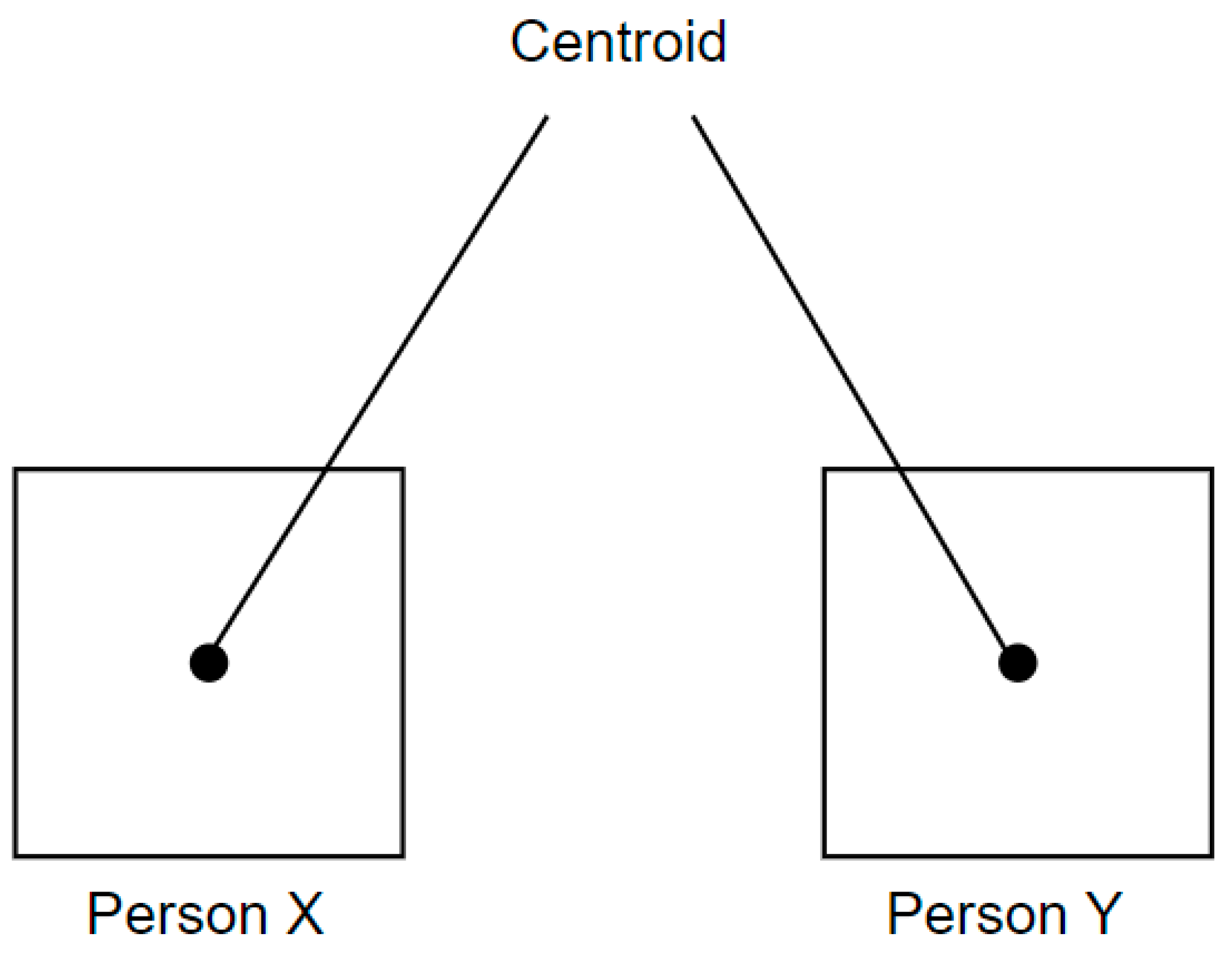
- As shown in Figure 2, the first step is to obtain the detected bounding boxes and calculate the centroids. For a given frame, the bounding box is identified, and its centroid is calculated, resulting in the centroid coordinates (x, y).
- 2.
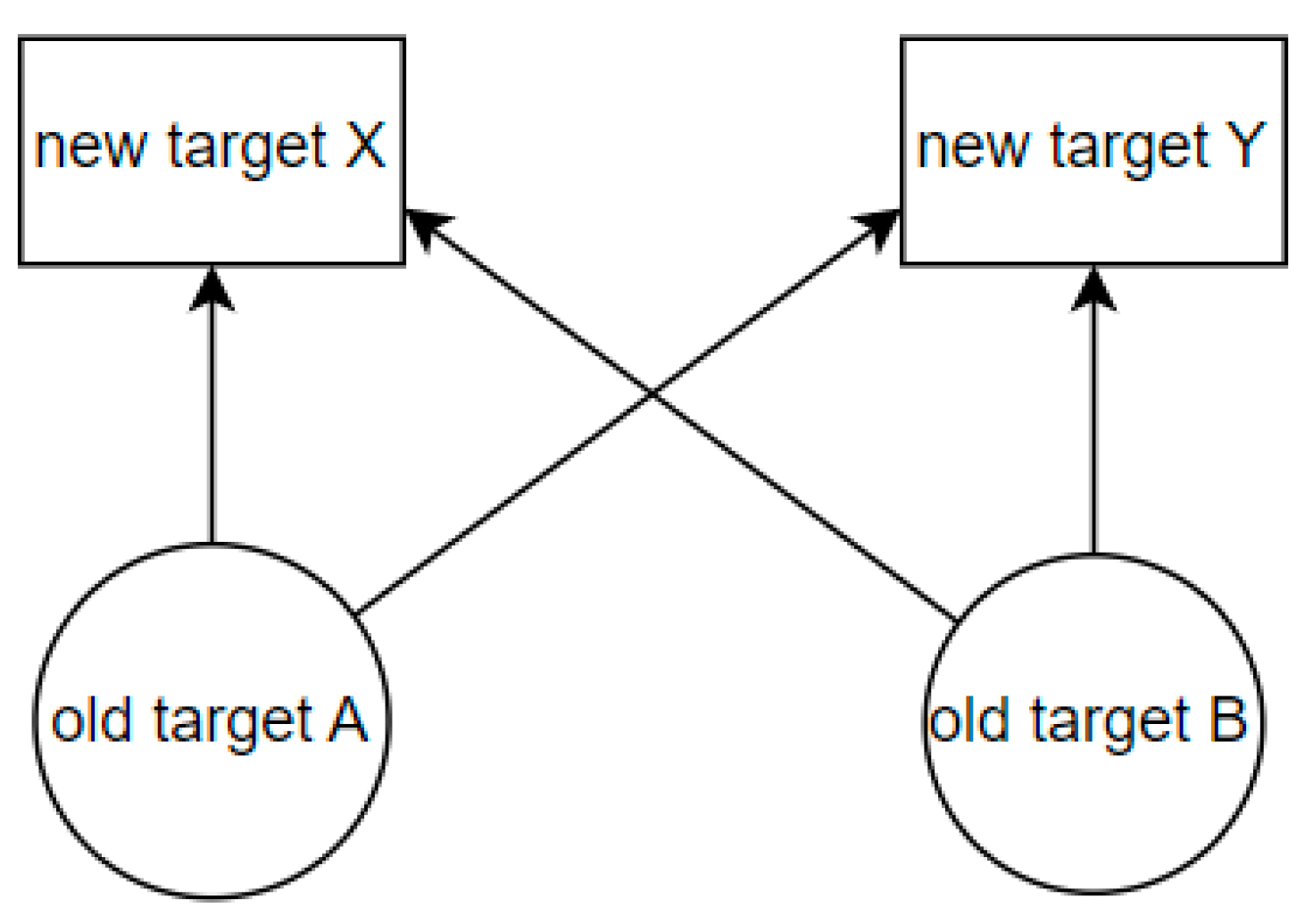
- As shown in Figure 3, the next step is to calculate the Euclidean distance between the centroids of the new and old bounding boxes. In this paper, the detection algorithm is used to obtain the bounding boxes, but individual IDs or labels are not assigned to each detected object. Instead, this method allows new and old targets to be linked.
- 3.
- Finally, update the centroid coordinates of existing targets. The premise of the centroid-tracking algorithm is that, for a given target, it will appear in consecutive frames, and the Euclidean distance between the centroids in frame N and frame N + 1 should be smaller than the Euclidean distance between different targets. Therefore, by linking the centroids of bounding boxes in consecutive frames based on the principle of minimum Euclidean distance, we can establish a target X to represent the temporal continuity across these frames and achieve the goal of object tracking. Additionally, when a new target is added, assign it a target ID, store the centroid coordinates of this new target, and calculate the Euclidean distance of the centroid for each frame in the video stream, continuously updating the centroid coordinates. For targets that have disappeared, their IDs are invalidated.
2.2. Algorithm Development
- (1)
- Station video data: This refers to the real-time video data from seismic stations, which is processed in the form of RTSP streams.
- (2)
- YOLOv5 object detection: The incoming RTSP real-time video stream is passed through the corresponding model for inference, resulting in a model output that includes coordinate information and detection results.
- (3)
- Kalman prediction: This module consists of two parts: prediction and update. It utilizes the Kalman filter to predict the potential position of the target in the next frame, i.e., the next frame’s coordinate information.
- (4)
- Centroid-matching association: By matching the actual detection coordinates of the next frame with the predicted coordinates from the previous frame, the algorithm establishes associations to track the targets.
- (1)
- In the prediction step, we use known information and a prediction model to estimate the target’s state at the next time step. Specifically, based on the current state, state- transition matrix, and control input, we calculate the predicted value of the state at the next time step. Additionally, we estimate the covariance matrix of the prediction error. The specific calculation is shown in Formulas (1) and (2):
- (2)
- In the update step, we use the estimated predicted state and the predicted error covariance matrix from the prediction step, along with the measurement model, to calculate the optimal estimate of the target’s state at the next time step. Specifically, we combine the predicted state and the predicted error covariance matrix with the current measurement to calculate the optimal estimate of the state at the next time step and the covariance matrix of the estimation error. The specific calculations are shown in Formulas (3) and (4):
3. Construction of an Intelligent Identification Model for Environmental Interference at Seismic Stations
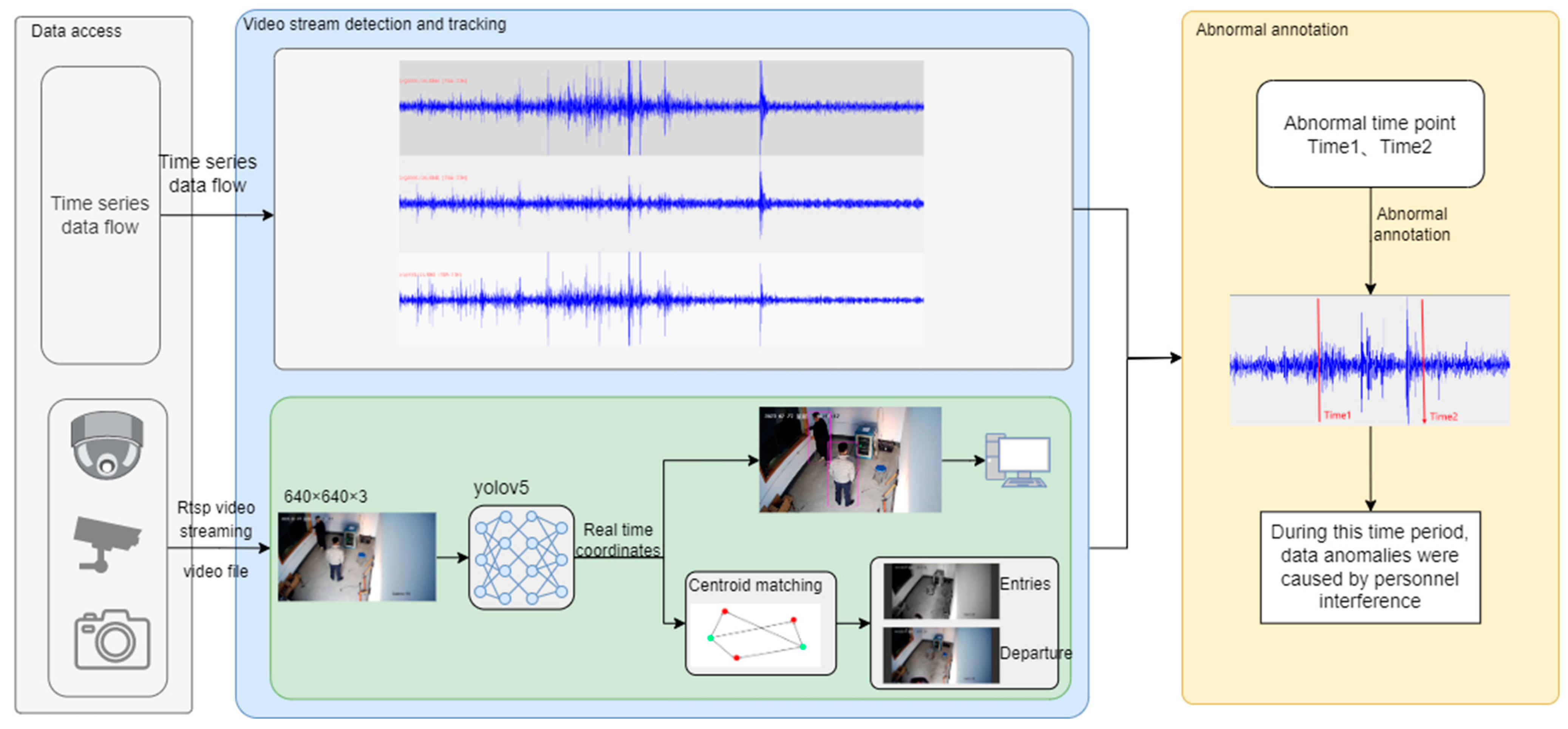
3.1. Data Access
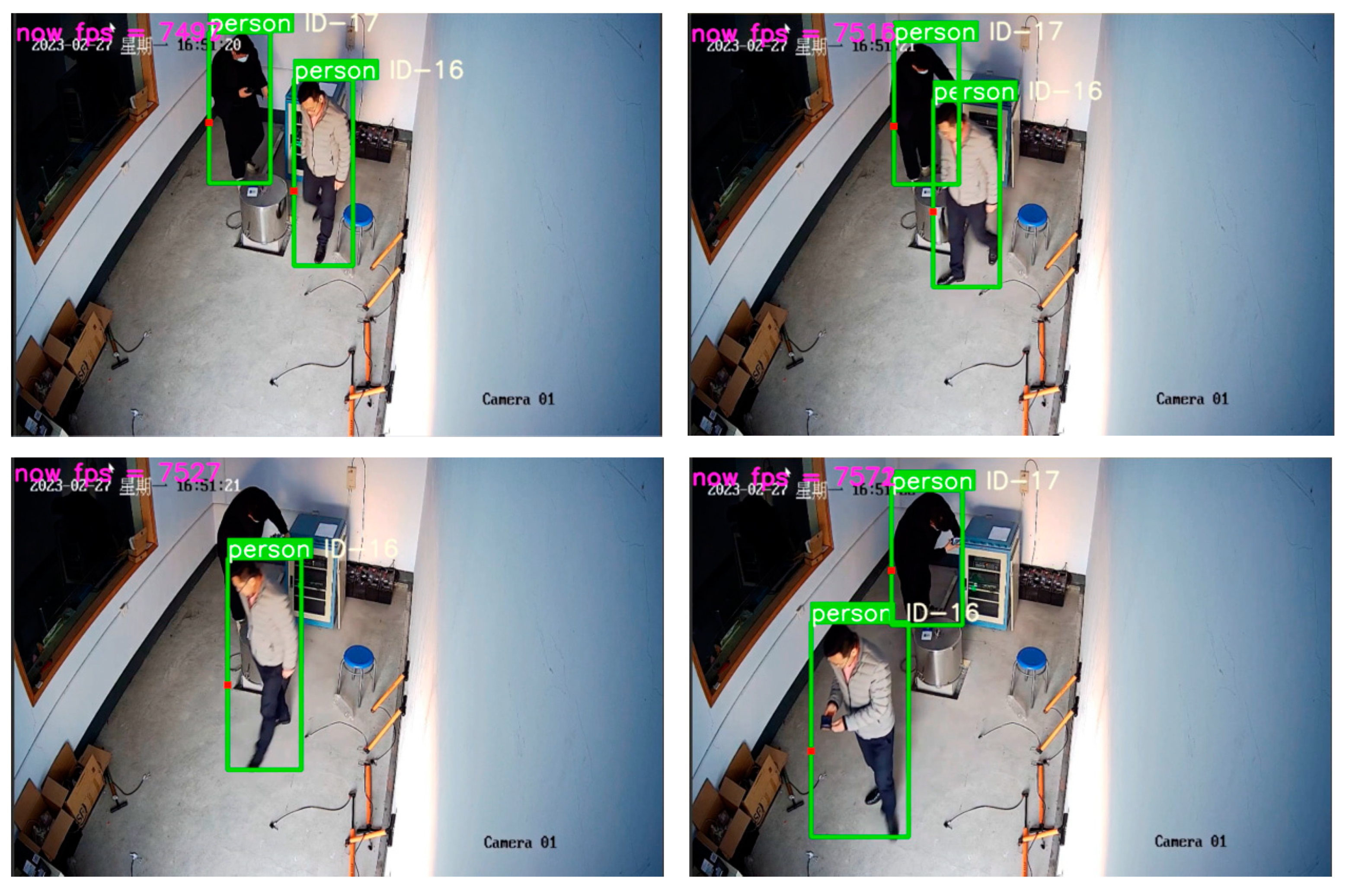
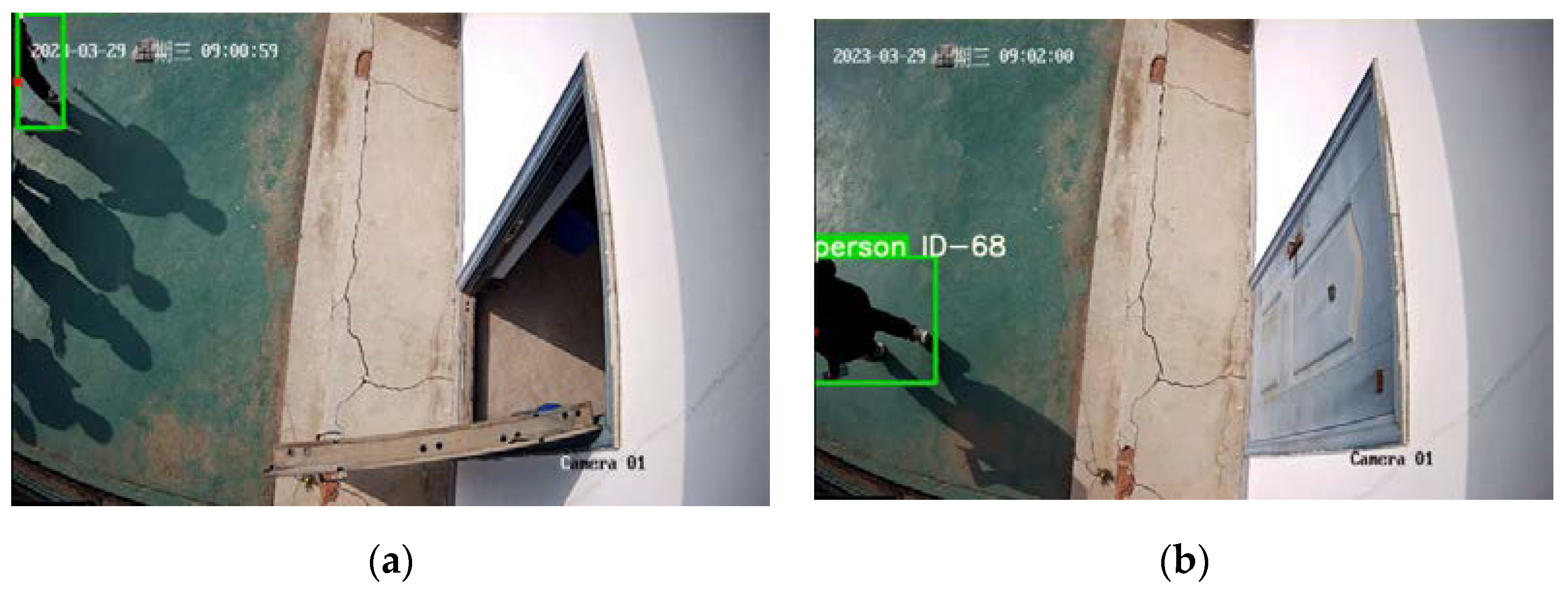
3.2. Video-Stream Detection and Tracking
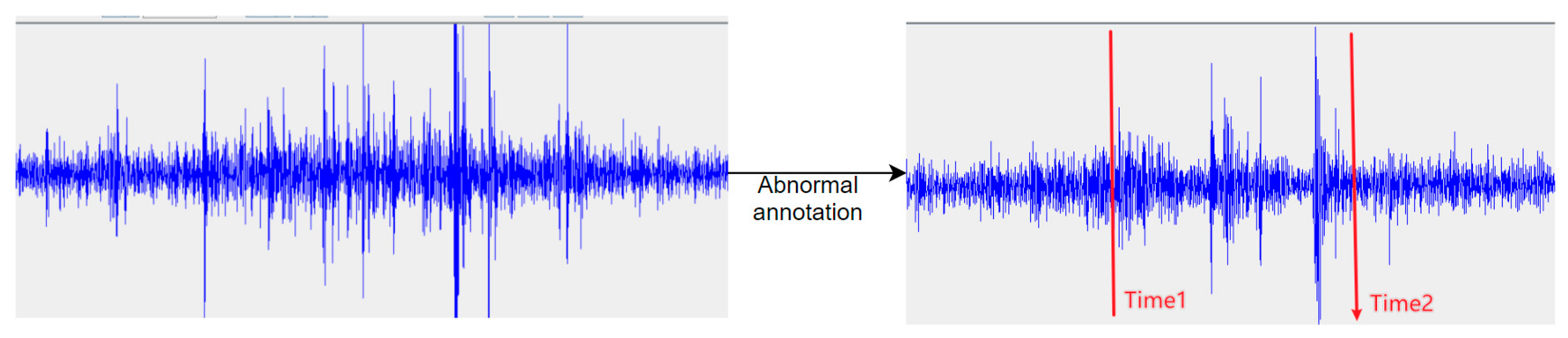
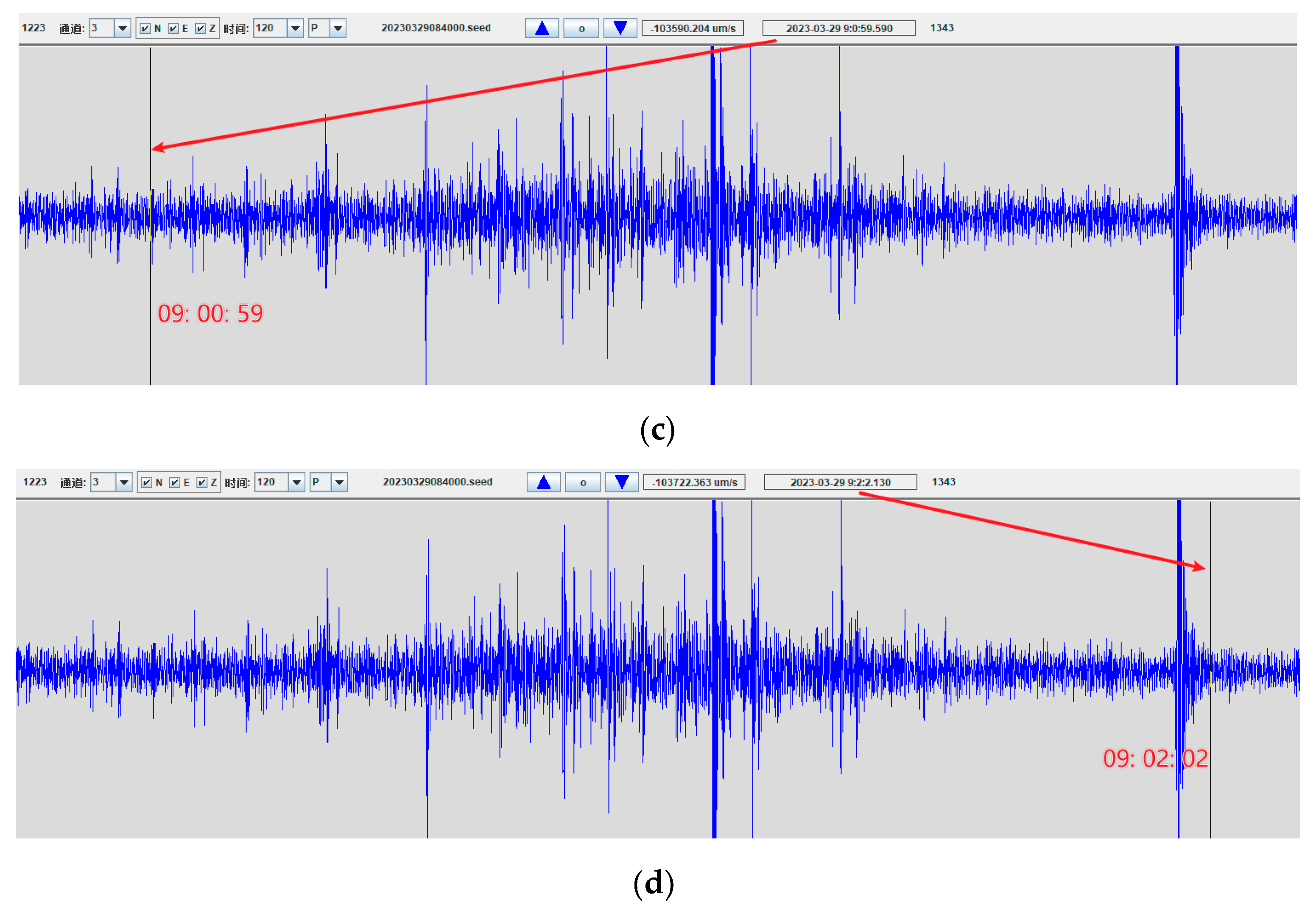
3.3. Abnormal Annotation
4. Experimental Process
4.1. Preparation of Detection Dataset
4.2. Experimental Environment and Parameter Settings
4.2.1. Training Settings
4.2.2. Detection Settings
4.3. Analysis of Experimental Results
4.4. Display of Experimental Results
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Jiang, C.; Liu, R. National Earthquake Intensity Rapid Reporting and Early Warning Project—Opportunities and Challenges of Seismic Networks. Eng. Res. Eng. Interdiscip. Perspect. 2016, 8, 250–257. [Google Scholar]
- Yang, Y.; Ma, W. Analysis on the perfect and application of basic information of seismic stations. Prog. Earthq. Sci. 2021, 9, 413–420. [Google Scholar] [CrossRef]
- Lecocq, T.; Hicks, S.P.; Van Noten, K.; Van Wijk, K.; Koelemeijer, P.; De Plaen, R.S.; Massin, F.; Hillers, G.; Anthony, R.E.; Apoloner, M.T.; et al. Global quieting of high-frequency seismic noise due to COVID-19 pandemic lockdown measures. Science 2020, 369, 1338–1343. [Google Scholar] [CrossRef]
- Ścisło, Ł.; Łacny, Ł.; Guinchard, M. COVID-19 lockdown impact on CERN seismic station ambient noise levels. Open Eng. 2021, 11, 1233–1240. [Google Scholar] [CrossRef]
- Kislov, K.V.; Gravirov, V.V.; Vinberg, F.E. Possibilities of Seismic Data Preprocessing for Deep Neural Network Analysis. Izv. Phys. Solid Earth 2020, 56, 133–144. [Google Scholar] [CrossRef]
- Choudhary, P.; Kumari, P.; Goel, N.; Saini, M. An Audio-Seismic Fusion Framework for Human Activity Recognition in an Outdoor Environment. IEEE Sens. J. 2022, 22, 22817–22827. [Google Scholar] [CrossRef]
- Choudhary, P.; Goel, N.; Saini, M. A Seismic Sensor based Human Activity Recognition Framework using Deep Learning. In Proceedings of the 2021 17th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Washington, DC, USA, 16–19 November 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Juan, T.; Cordova-Esparza, D. A comprehensive review of YOLO: From YOLOv1 to YOLOv8 and beyond. arXiv 2023, arXiv:2304.00501. [Google Scholar]
- Ren, J.; Gong, N.; Han, Z. Multi target tracking algorithm based on YOLOv3 and Kalman filter. Comput. Appl. Softw. 2020, 37, 169–176. [Google Scholar]
- Quanan, G.; Xia, Y. Kalman Filter Algorithm for Sports Video Moving Target Tracking. In Proceedings of the 2020 International Conference on Advance in Ambient Computing and Intelligence (ICAACI), Ottawa, ON, Canada, 12–13 September 2020; pp. 26–30. [Google Scholar] [CrossRef]
- Rohal, P.; Ochodnicky, J. Target Tracking Based on Particle and Kalman Filter Combined with Neural Network. In Proceedings of the 2019 Communication and Information Technologies (KIT), Vysoke Tatry, Slovakia, 9–11 October 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Li, H.; Xu, Z.; Zhang, Y.; Guo, S.; Cui, G.; Kong, L. Robust Indoor Target Tracking Based on Track Matching. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, Hainan, China, 15–19 December 2021; pp. 3023–3026. [Google Scholar] [CrossRef]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F.; Vedaldi, A.; Torr, P.H. Fully-convolutional siamese networks for object tracking. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Cham, Switzerland, 2016; pp. 850–865. [Google Scholar]
- Guo, Q.; Feng, W.; Zhou, C.; Huang, R.; Wan, L.; Wang, S. Learning dynamic siamese network for visual object tracking. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 1763–1771. [Google Scholar]
- Valmadre, J.; Bertinetto, L.; Henriques, J.; Vedaldi, A.; Torr, P.H. End-to-end representation learning for correlation filter based tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2805–2813. [Google Scholar]
- Gomes, H.; Redinha, N.; Lavado, N.; Mendes, M. Counting People and Bicycles in Real Time Using YOLO on Jetson Nano. Energies 2022, 15, 8816. [Google Scholar] [CrossRef]
- Mu, X.; Lin, Y.; Liu, J.; Cao, Y.; Liu, H. Surface Navigation Target Detection and Recognition based on SSD. In Proceedings of the 2019 3rd International Conference on Electronic Information Technology and Computer Engineering (EITCE), Xiamen, China, 18–20 October 201; pp. 649–653. [CrossRef]
- Liu, X. Underwater target maneuver detection algorithm based on width learning. In Proceedings of the 2022 IEEE 5th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 16–18 December 2022; pp. 985–989. [Google Scholar] [CrossRef]
- Feng, Y.; Wei, Y.; Li, K.; Feng, Y.; Gan, Z. Improved Pedestrian Fall Detection Model Based on YOLOv5. In Proceedings of the 2022 IEEE 6th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Beijing, China, 3–5 October 2022; pp. 410–413. [Google Scholar] [CrossRef]
- Fu, B.; Huang, L. Polygon matching using centroid distance sequence in polar grid. In Proceedings of the 2016 2nd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 14–17 October 2016; pp. 733–736. [Google Scholar] [CrossRef]
- Xu, Y.; Song, Y.; Zhao, H. A Trajectory Tracking Method Combining YOLOv5 and Centroid Matching. Electron. Meas. Technol. 2022, 45, 123–129. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Number of Pictures | Number of Annotations |
|---|---|---|
| indoor | 232 | 419 |
| sunny (outdoor) | 269 | 642 |
| rainy day (outdoor) | 212 | 406 |
| heavy fog (outdoor) | 195 | 365 |
| night (outdoor) | 207 | 418 |
| Model Size (MB) | Test Number of Images | Test Accuracy of Target Number | Accuracy | Precision | Recall | Average Processing Speed of Images (s) |
|---|---|---|---|---|---|---|
| 12.2 | 1000 | 4308 | 0.932 | 0.917 | 0.832 | 0.00212 |
| Algorithm Name | Occlusion Case | MOTA | MOTP | IDF1 | Most Tracking Target Percentage | Most Lost Target Percentage | Processing Time per Frame |
|---|---|---|---|---|---|---|---|
| IOU | 82 | 0.512 | 0.656 | 0.531 | 16.4 | 35.5 | 0.0354~0.0435 |
| Centorid Matching | 82 | 0.564 | 0.704 | 0.549 | 22.8 | 32.7 | 0.0351~0.0424 |
| Ours | 2 | 0.614 | 0.791 | 0.622 | 32.8 | 18.2 | 0.0357~0.0441 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, Y.; Tian, P.; Song, H.; Yin, Y.; Si, G.; Liu, R. Intelligent Recognition of Seismic Station Environmental Interference Based on YOLOv5. Electronics 2023, 12, 3121. https://doi.org/10.3390/electronics12143121
Cai Y, Tian P, Song H, Yin Y, Si G, Liu R. Intelligent Recognition of Seismic Station Environmental Interference Based on YOLOv5. Electronics. 2023; 12(14):3121. https://doi.org/10.3390/electronics12143121
Chicago/Turabian StyleCai, Yin, Pengxin Tian, Haoran Song, Yuzhen Yin, Guannan Si, and Ruifeng Liu. 2023. "Intelligent Recognition of Seismic Station Environmental Interference Based on YOLOv5" Electronics 12, no. 14: 3121. https://doi.org/10.3390/electronics12143121
APA StyleCai, Y., Tian, P., Song, H., Yin, Y., Si, G., & Liu, R. (2023). Intelligent Recognition of Seismic Station Environmental Interference Based on YOLOv5. Electronics, 12(14), 3121. https://doi.org/10.3390/electronics12143121