
Passive Direct Position Determination Based on KL Transform and Feature Matching


Abstract
1. Introduction
- To adapt to the high degree of freedom and difficulty in locating MIMO radar emitter signals, this paper proposes an algorithm based on KL transform and feature matching to capture signal features of MIMO radar emitters, which can reconstruct the waveform of MIMO radar emitters without the waveform information.
- The proposed algorithm expands the localization accuracy of the DPD algorithm in situations where the signal waveform is unknown and reduces the computational complexity.
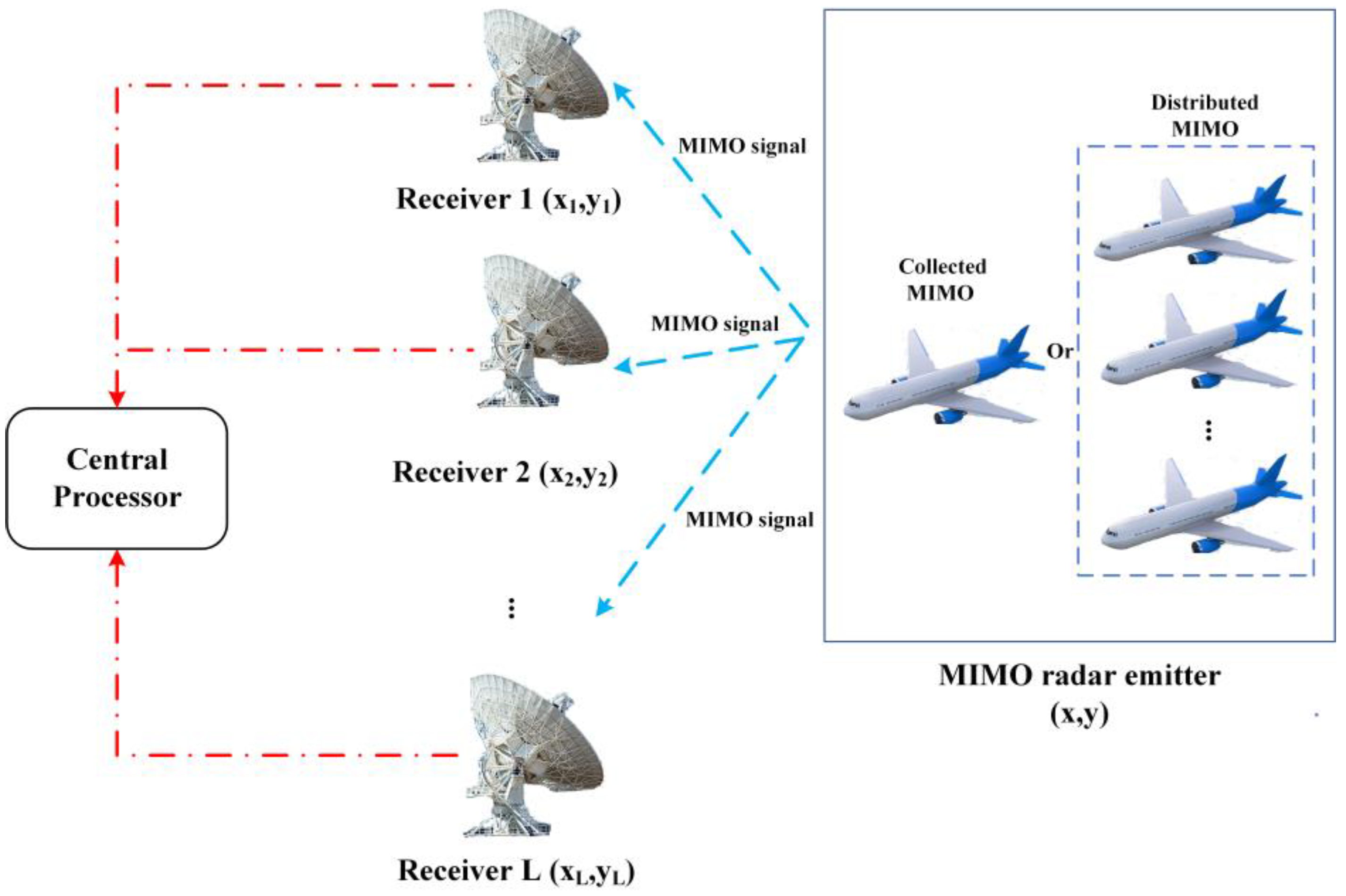
- The proposed algorithm proposes a localization framework for the distributed multi-station passive localization system, which can locate multiple signal forms.
2. Signal Model
3. Problem Formulation
4. Algorithm Description
4.1. Definition of KL Transform
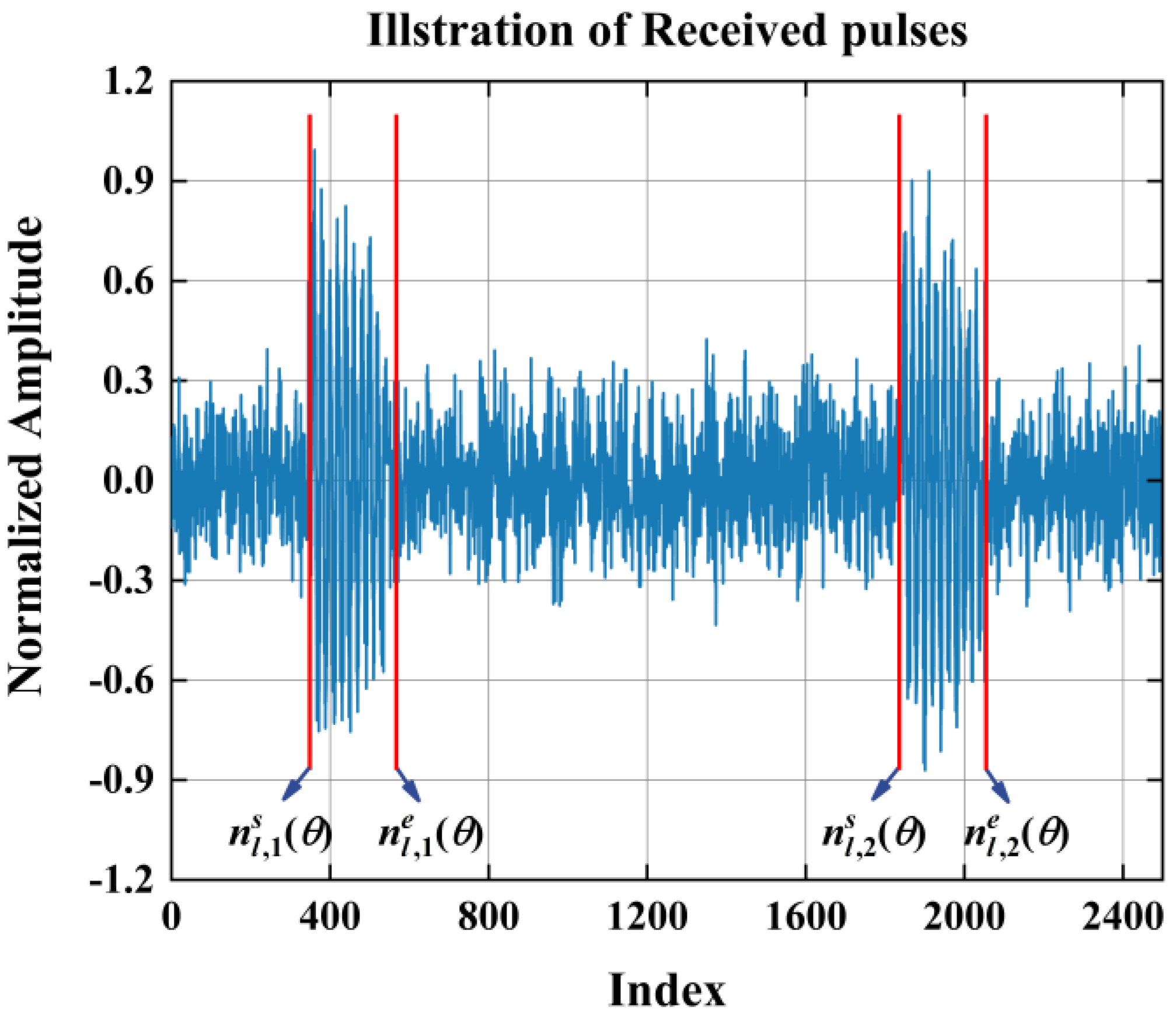
4.2. Parameter Estimation Based on KL Transform and FM
- The initial time of the signal is different, while the signal frequency is the same (similar within the allowable error conditions and the same below);
- The estimated value of the signal pulse width is the same;
- The pulse repetition interval of the signal is the same.
4.3. Design of the Localization Algorithm
| Algorithm 1 The DPD-KL-FM algorithm. |
| Input: System parameter ; observation signal sample r |
|
Calculate the average power coefficient and objective function value; |
Calculate and replace with . |
End |
|
| Output: The position of the MIMO radar emitter . |
4.4. Analysis of Complexity
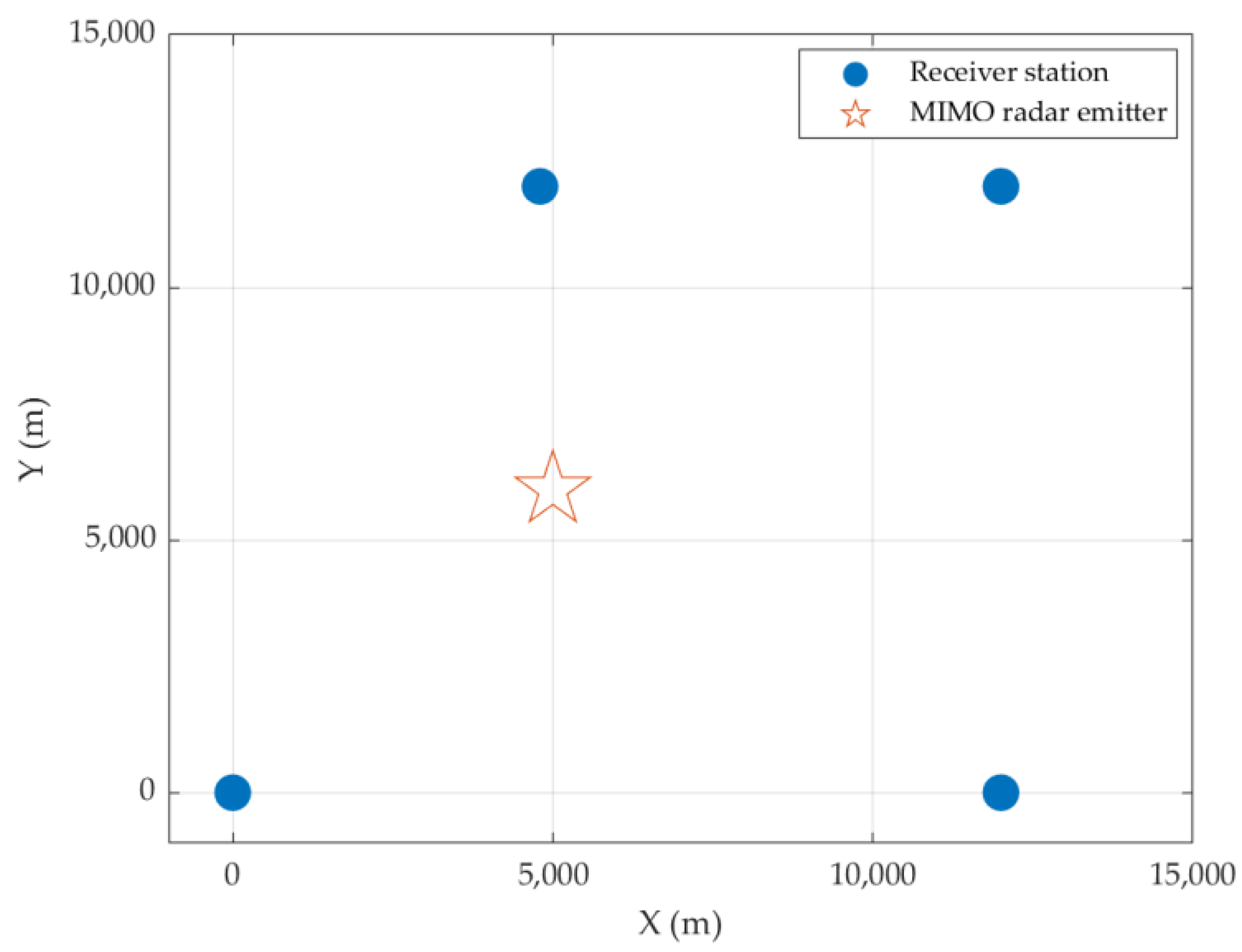
5. Simulation Results and Discussion
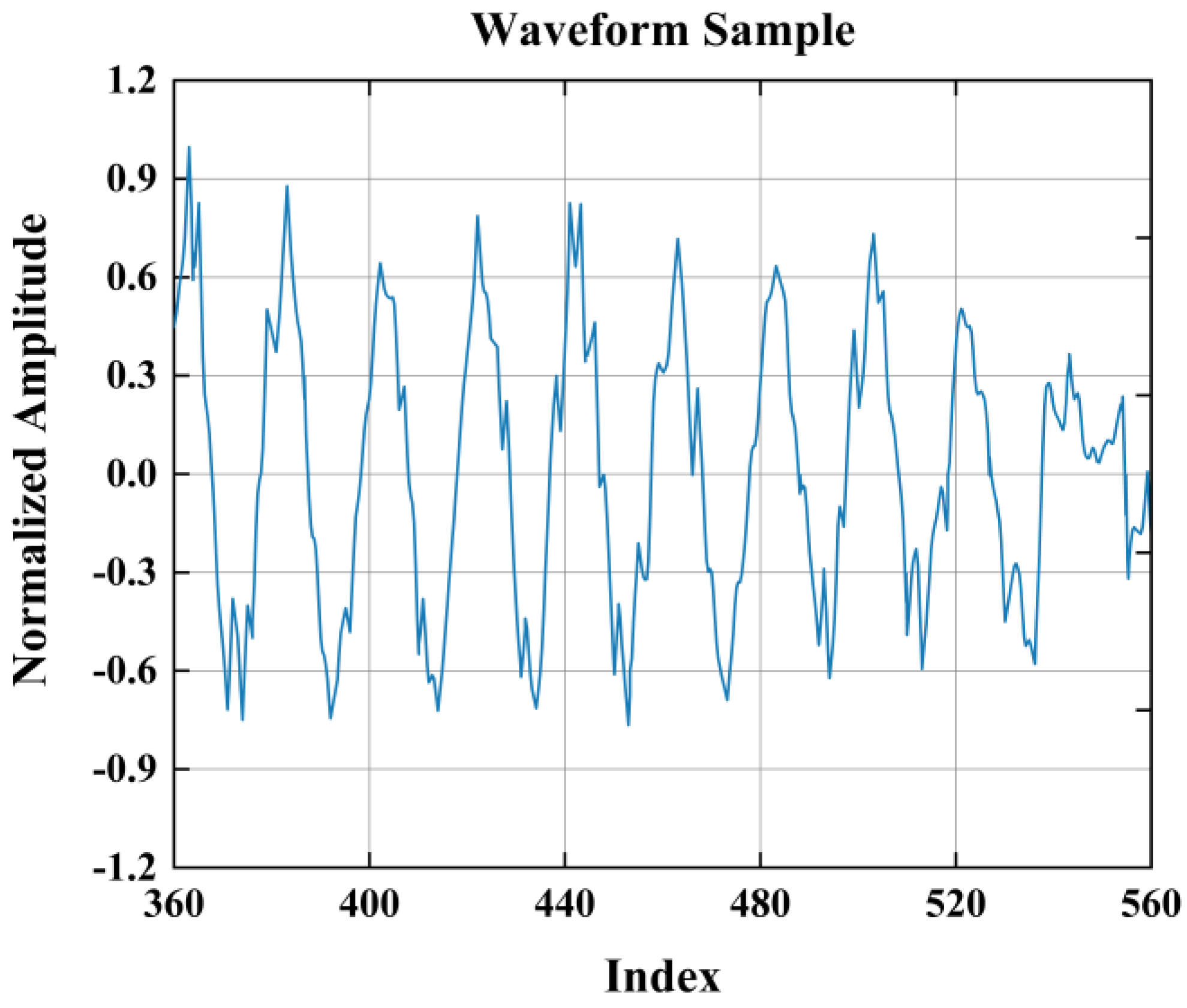
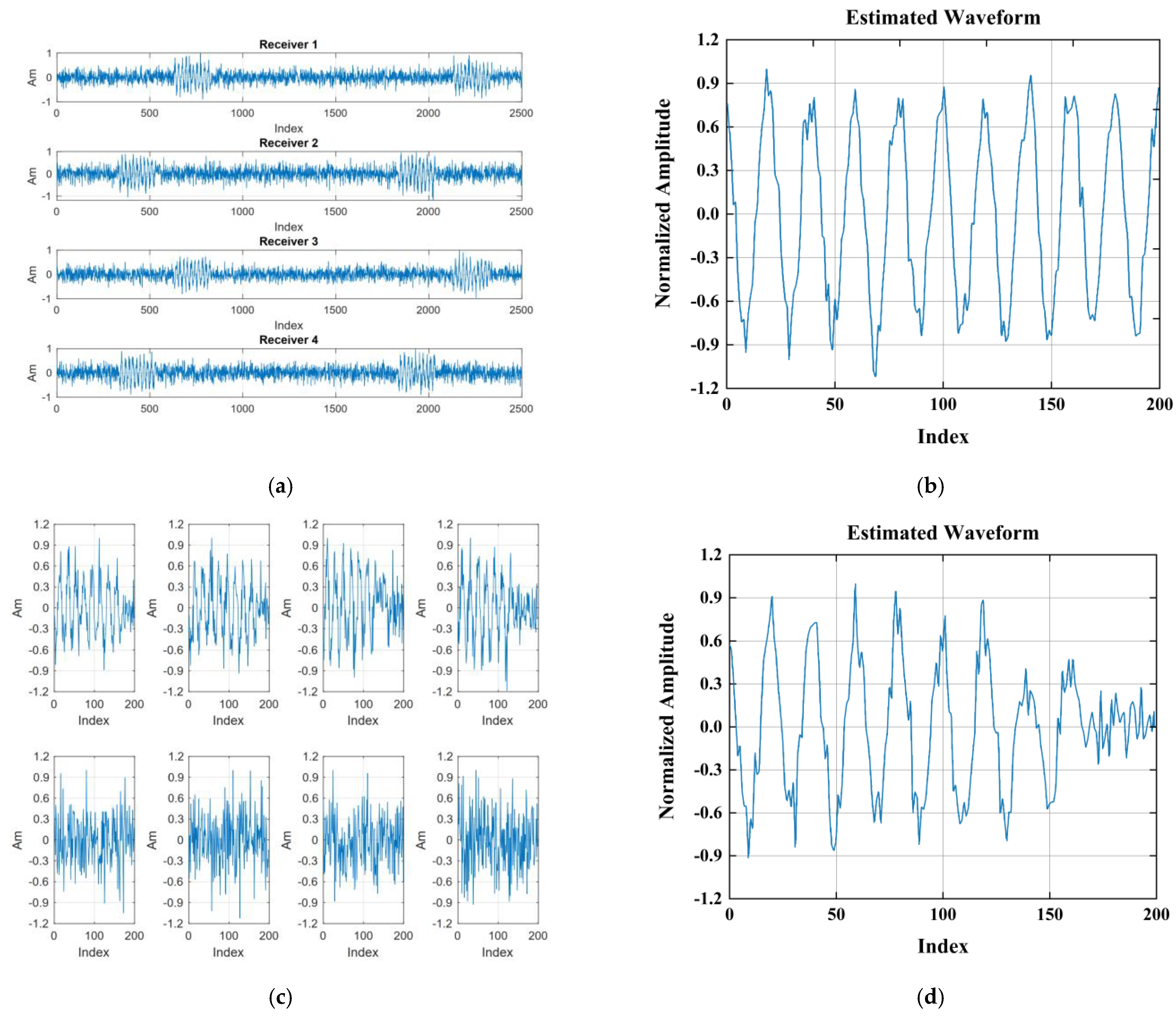
5.1. Effect of KL Transform and FM Technique on Waveform Estimation
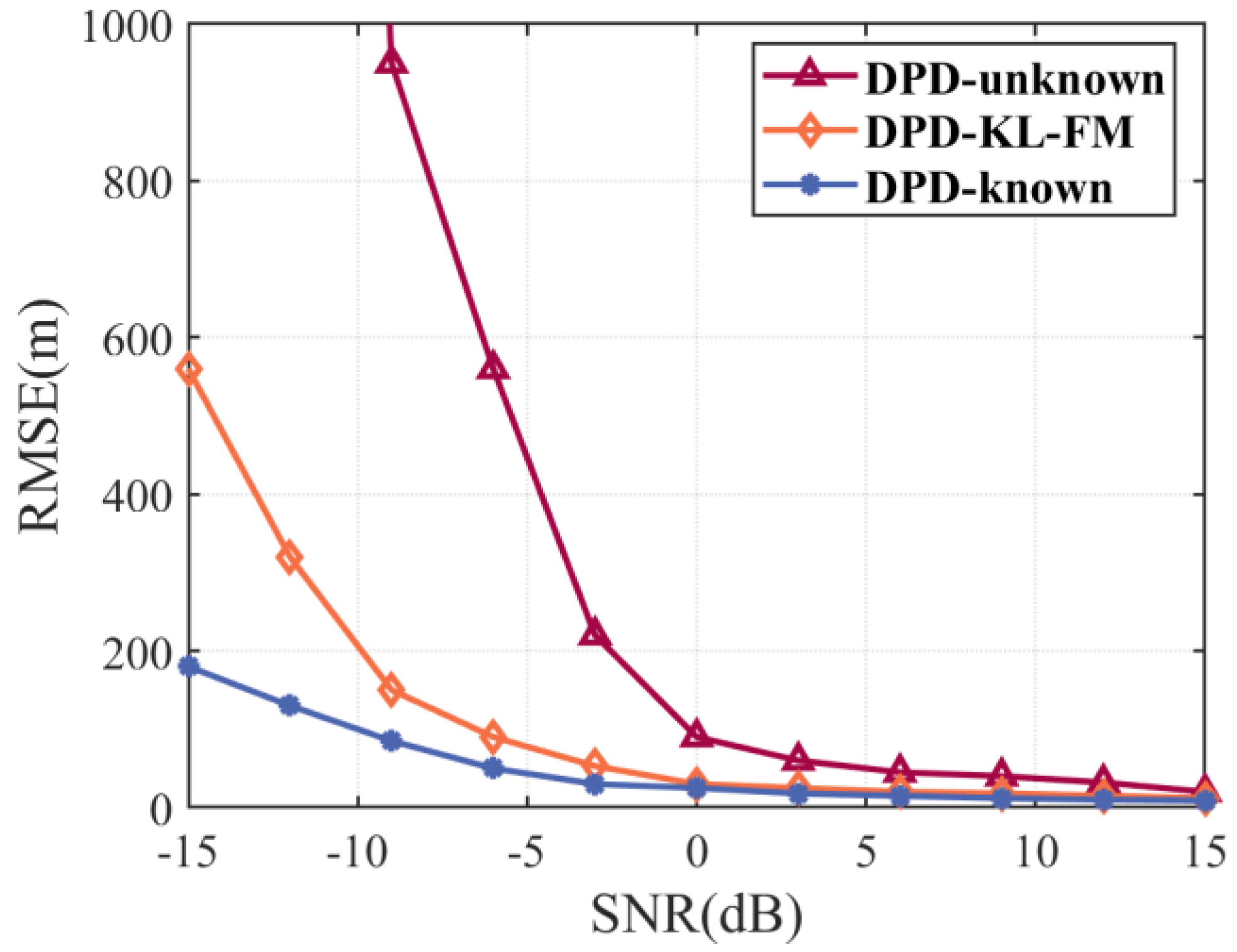
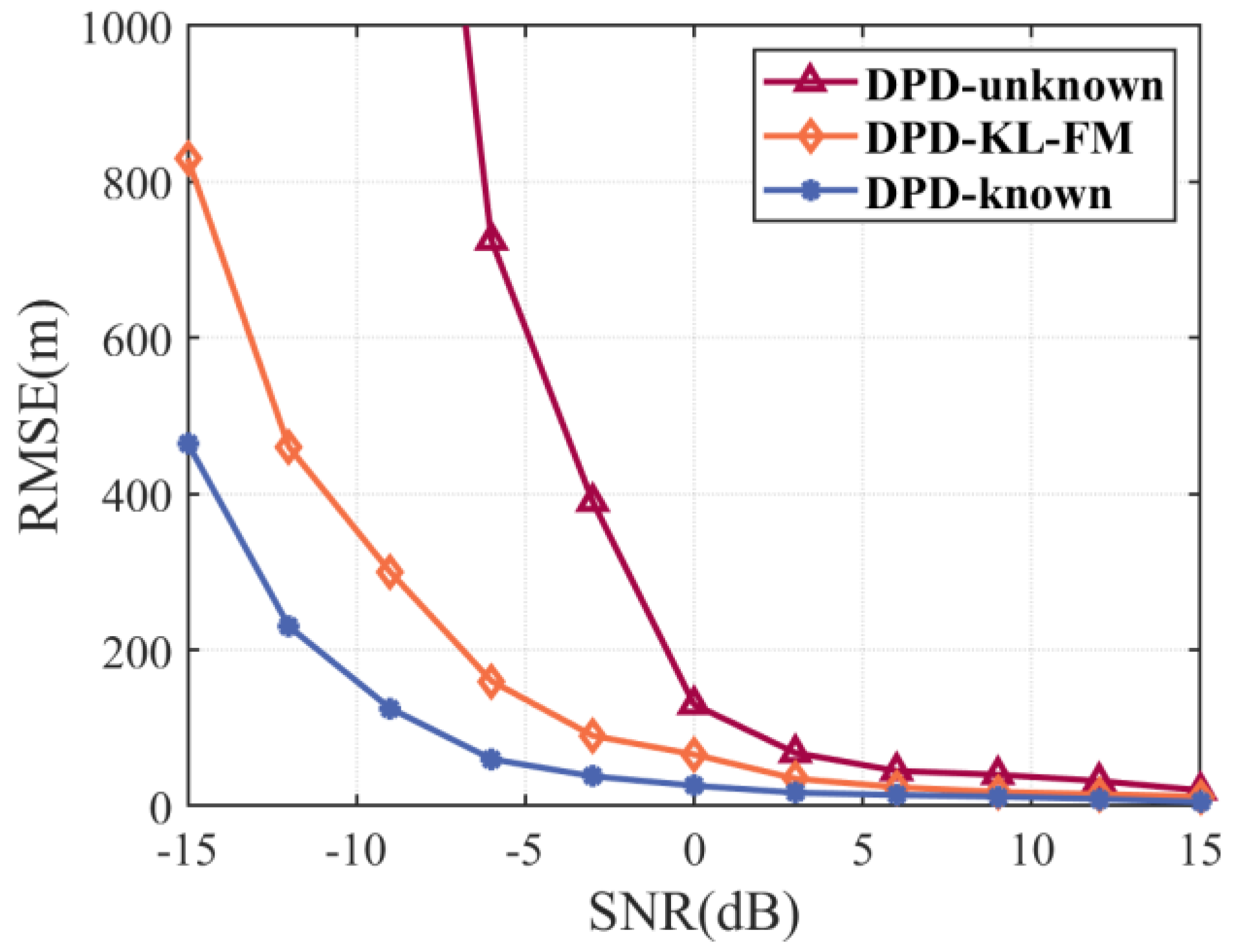
5.2. Algorithm Localization Performance Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pan, J. Multi-station TDOA Localization Method Based on Tikhonov Regularization. In Proceedings of the 2022 7th International Conference on Intelligent Computing and Signal Processing (ICSP), Xi’an, China, 15–17 April 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1903–1906. [Google Scholar]
- Zhang, Q.; Li, J.; Tang, Y.; Deng, W.; Zhang, X. A Direct Position Determination Method under Unknown Multi-Perturbation with Moving Distributed Arrays. Electronics 2023, 12, 1016. [Google Scholar] [CrossRef]
- So, H.C. Source localization: Algorithms and analysis. In Handbook of Position Location: Theory, Practice, and Advances; Wiley: Hoboken, NJ, USA, 2011; pp. 25–66. [Google Scholar]
- Zhang, S.; Jiang, H.; Yang, K. Detection and localization for an unknown emitter using TDOA measurements and sparsity of received signals in a synchronized wireless sensor network. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, UK, 26–31 May 2013; pp. 5146–5149. [Google Scholar]
- Dong, H.; Yin, C.; Zhang, Y. Research on RSS Based Multi Station Passive Location Method for Satellite Emitter. In Proceedings of the 2022 IEEE 10th International Conference on Information, Communication and Networks (ICICN), Zhangye, China, 19–22 August 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 147–151. [Google Scholar]
- Bilgi Akdemir, S. An Overview of Detection in MIMO Radar. Master’s Thesis, Middle East Technical University, Ankara, Turkey, 2010. [Google Scholar]
- Fishler, E.; Haimovich, A.; Blum, R.; Chizhik, D.; Cimini, L.; Valenzuela, R. MIMO radar: An idea whose time has come. In Proceedings of the 2004 IEEE Radar Conference (IEEE Cat. No.04CH37509), Philadelphia, PA, USA, 29 April 2004; pp. 71–78. [Google Scholar]
- Fletcher, A.S.; Robey, F.C. Performance bounds for adaptive coherence of sparse array radar. In Proceedings of the 12th Annual Workshop on Adaptive Sensor Array Processing; Massachusetts inst of tech Lexington Lincoln lab Lexington, Lexington, MA, USA; 2003. [Google Scholar]
- Bekkerman, I.; Tabrikian, J. Target Detection and Localization Using MIMO Radars and Sonars. IEEE Trans. Signal Process. 2006, 54, 3873–3883. [Google Scholar] [CrossRef]
- Hack, D.E.; Patton, L.K.; Himed, B.; Saville, M.A. Detection in Passive MIMO Radar Networks. IEEE Trans. Signal Process. 2014, 62, 2999–3012. [Google Scholar] [CrossRef]
- Weiss, A.J. Direct position determination of narrowband radio transmitters. IEEE Signal Process. Lett. 2004, 11, 513–516. [Google Scholar] [CrossRef]
- Amar, A.; Weiss, A.J. Direct position determination (DPD) of multiple known and unknown radio-frequency signals. In Proceedings of the 2004 12th European Signal Processing Conference, Vienna, Austria, 6–10 September 2004; pp. 1115–1118. [Google Scholar]
- Chen, F.; Zhou, T.; Yi, W.; Kong, L.; Guo, S. Passive direct positioning of emitters with unknown LFM signals based on FRFT. In Proceedings of the 2018 IEEE Radar Conference (RadarConf18), Oklahoma City, OK, USA, 23–27 April 2018; pp. 1134–1139. [Google Scholar]
- Zhao, C.; Ke, W.; Wang, T. Multi-target localization using distributed MIMO radar based on spatial sparsity. In Proceedings of the 2021 IEEE International Conference on Artificial Intelligence and Computer Applications (ICAICA), Dalian, China, 28–30 June 2021; pp. 591–595. [Google Scholar]
- Sadeghi, M.; Behnia, F.; Amiri, R.; Farina, A. Target Localization Geometry Gain in Distributed MIMO Radar. IEEE Trans. Signal Process. 2021, 69, 1642–1652. [Google Scholar] [CrossRef]
- Buzzi, S.; Grossi, E.; Lops, M.; Venturino, L. Foundations of MIMO Radar Detection Aided by Reconfigurable Intelligent Surfaces. IEEE Trans. Signal Process. 2022, 70, 1749–1763. [Google Scholar] [CrossRef]
- Kafshgari, S.; Andargoli, S.M.H. Closed-form CRLB and LPI power allocation strategies for MIMO radars with unneglectable clutter. Phys. Commun. 2023, 58, 102011. [Google Scholar] [CrossRef]
- Xiong, K.; Cui, G.; Yi, W.; Wang, S.; Kong, L. Distributed Localization of Target for MIMO Radar with Widely Separated Directional Transmitters and Omnidirectional Receivers. IEEE Trans. Aerosp. Electron. Syst. 2022, 59, 3171–3187. [Google Scholar] [CrossRef]
- Gogineni, S.; Nehorai, A. Target estimation using sparse modeling for distributed MIMO radar. IEEE Trans. Signal Process. 2011, 59, 5315–5325. [Google Scholar] [CrossRef]
- Sun, B.; Chen, H.; Wei, X.; Li, X. Multitarget direct localization using block sparse bayesian learning in distributed MIMO radar. Int. J. Antennas Propag. 2015, 2015, 903902. [Google Scholar] [CrossRef]
- Eshkevari, A.; Sadough, S.M.S. An Improved Method for Localization of Wireless Capsule Endoscope Using Direct Position Determination. IEEE Access 2021, 9, 154563–154577. [Google Scholar] [CrossRef]
- Ni, L.; Wu, R.; Yang, J.; Chen, J.; Wan, Q. Fast Direct-Position-Determination based on PSO. In Proceedings of the IGARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 1971–1974. [Google Scholar]
- Radmard, M.; Karbasi, S.M.; Nayebi, M.M. MIMO localization by illuminators of opportunity. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 November 2011; Volume 1, pp. 112–115. [Google Scholar]
- Schonhoff, T.A.; Giordano, A.A. Detection and Estimation Theory and its Applications; Pearson College Division: Drive Victoria, BC, Canada, 2006. [Google Scholar]
- Ren, H.; Liu, H.; Guo, R. A Fast Direct Position Determination Algorithm for LFM Signal Based on Spectrum Detection. J. Sens. 2022, 2022, 2222247. [Google Scholar] [CrossRef]
- Sanchez-Marin, F. Computerized recognition of biological objects using the Hotelling transform. In Proceedings of the 22nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (Cat. No.00CH37143), Chicago, IL, USA, 23–28 July 2000; Volume 4, pp. 3067–3070. [Google Scholar]
- Xue, X.; Zheng, Y. A method based on wavelet transform and discrete KL transform for color image filtering. In Proceedings of the 2010 2nd International Conference on Signal Processing Systems, Dalian, China, 5–7 July 2010; IEEE: Piscataway, NJ, USA, 2010; Volume 2, pp. V2-699–V2-701. [Google Scholar]
- Du, B.; Geng, X.; Ding, Q. Generation and realization of digital chaotic key sequence based on KL transform. In Proceedings of the 2011 Fourth International Workshop on Chaos-Fractals Theories and Applications, Hangzhou, China, 19–22 October 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 385–389. [Google Scholar]
- Li, J.; Stoica, P. MIMO Radar Signal Processing; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Sun, H.; Brigui, F.; Lesturgie, M. Analysis and comparison of MIMO radar waveforms. In Proceedings of the 2014 International Radar Conference, Lille, France, 13–17 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–6. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L | the number of receiver stations |
| K | the number of pulses of the transmitted signal |
| the observed signal for the l-th receiver station | |
| T | the observation time |
| the pulse repetition interval | |
| the pulse width | |
| the delay from the emitter to the l-th receiver | |
| the initial phase of the k-th pulse signal | |
| the attenuation coefficient of the channel | |
| the signal sample matrix | |
| the noise term of the intercepted signal sample | |
| the parameter information except the parameters to be estimated | |
| the implicit mathematical model | |
| the average power coefficient | |
| the sampling time interval | |
| the starting index of the kth single pulse signal of the pulse sequence | |
| the terminal index of the kth single pulse signal of the pulse sequence | |
| the pulse width of the kth single pulse signal extracted from . |
| Signal Parameters | Parameter Value |
|---|---|
| Pulse width | |
| Pulse repetition interval | |
| Starting time | |
| Sampling frequency | |
| The frequency of the carrier signal | |
| Time duration T | 1 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, H.; Guo, R.; Liu, H. Passive Direct Position Determination Based on KL Transform and Feature Matching. Electronics 2023, 12, 2971. https://doi.org/10.3390/electronics12132971
Ren H, Guo R, Liu H. Passive Direct Position Determination Based on KL Transform and Feature Matching. Electronics. 2023; 12(13):2971. https://doi.org/10.3390/electronics12132971
Chicago/Turabian StyleRen, Han, Rujiang Guo, and Huijie Liu. 2023. "Passive Direct Position Determination Based on KL Transform and Feature Matching" Electronics 12, no. 13: 2971. https://doi.org/10.3390/electronics12132971
APA StyleRen, H., Guo, R., & Liu, H. (2023). Passive Direct Position Determination Based on KL Transform and Feature Matching. Electronics, 12(13), 2971. https://doi.org/10.3390/electronics12132971