

Image Recognition of Group Point Objects under Interference Conditions




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Research Methods
2.1. Vector-Field Model of a Flat Image of a GrPO
- The rotation of all GrPO points by a certain angle, , leads to the rotation of the contour, , by the same angle.
- An offset by d of the origin of the GrPO points will lead to a similar offset of the origin of the contour, .
2.2. Recognition of GrPOs by Vector-Field Models
- Reference vector-field descriptions of the GrPO are formed.
- Based on the localized and numbered GrPO image, its vector-field model is calculated.
- This vector-field model is compared with each reference model. The similarity measure is the output signal of the contour-matched filter (8). A prerequisite for solving the recognition problem is that the recognized GrPO belongs to one of the reference classes.
- The recognized one is the GrPO, for which reaches the maximum.
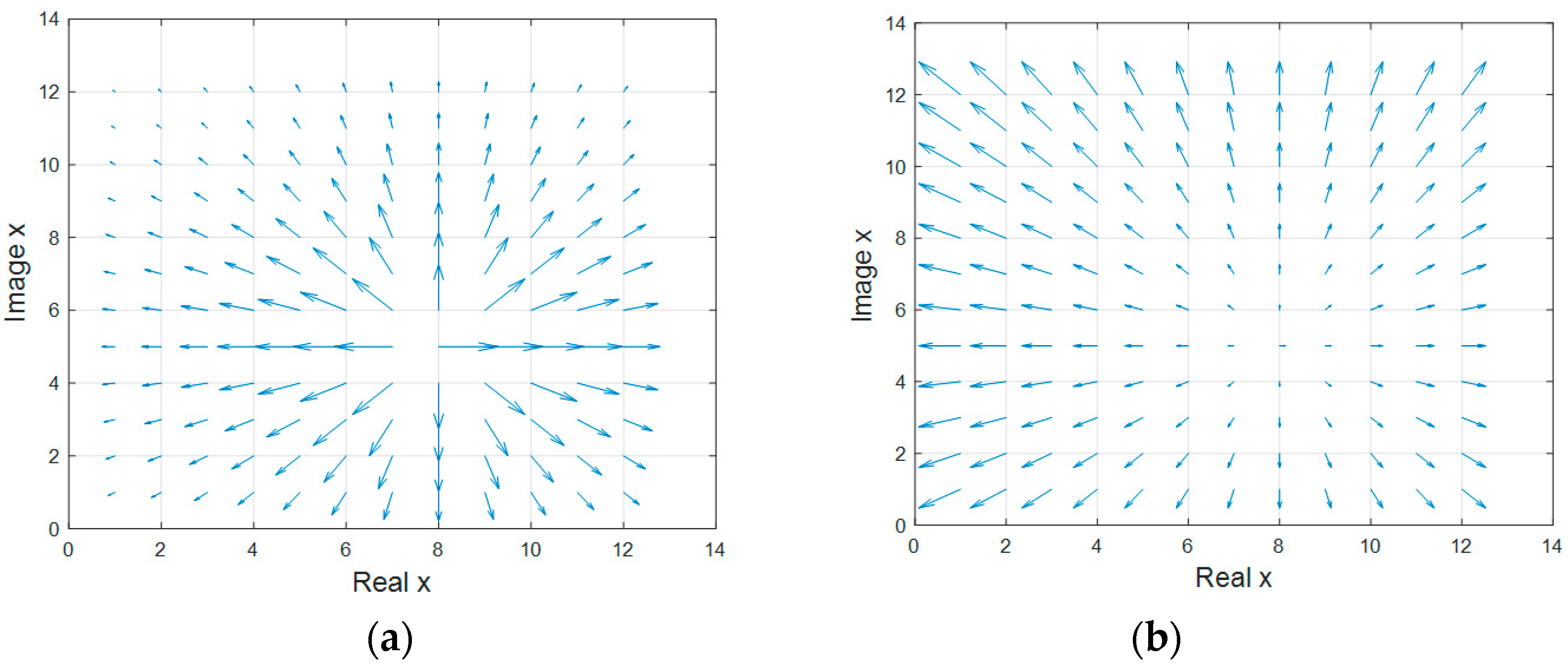
2.3. Field-Forming Functions
- Gaussian:
- 2.
- Constant field intensity:
- 3.
- Linear increase in field intensity:
- 4.
- Hyperbolic decrease in field intensity:
2.4. Numbering of GrPO Points
3. Results
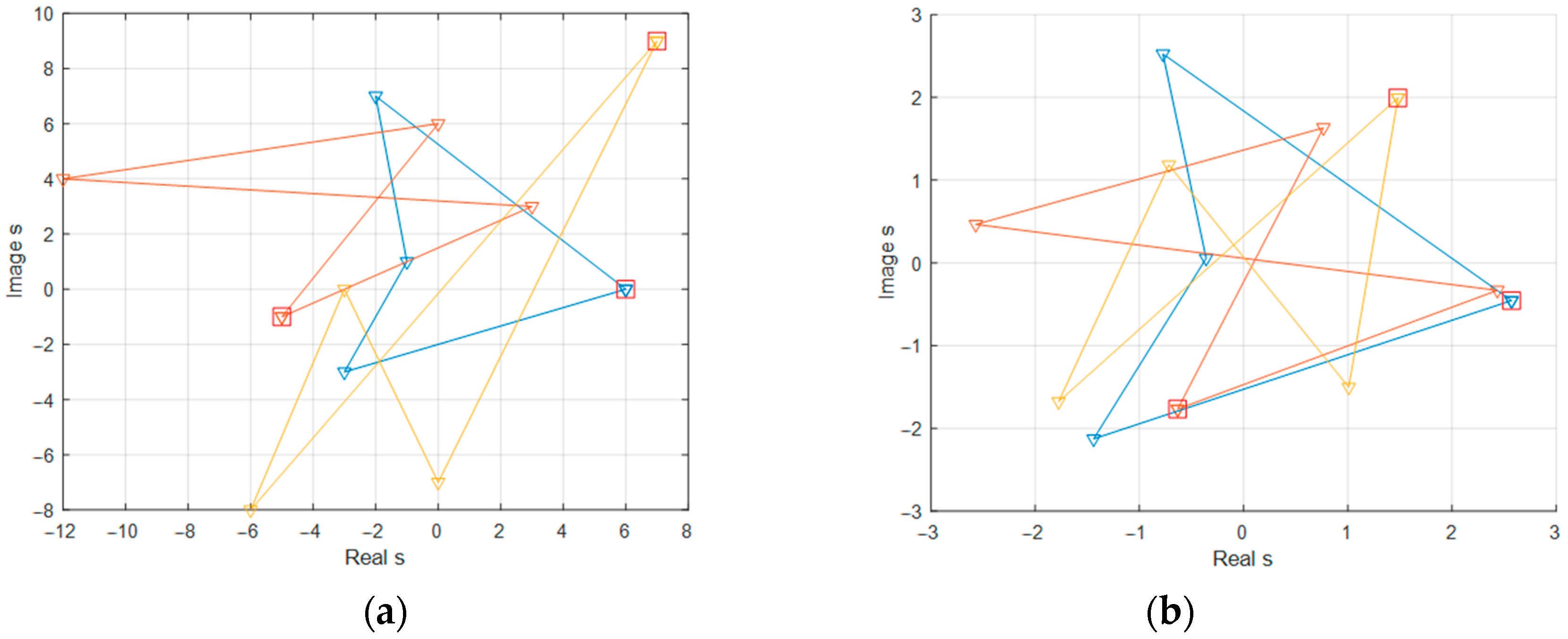
- The formation of a bank of reference and signal GrPOs localized in the plane of the image, with the construction of a vector-field model. The simulation of the location of GrPO points was carried out by generating an array of quasi-random numbers obeying a normal distribution. The initial data in the process of obtaining the reference contours of the vector-field model were as follows: size of the image, ; number of reference point objects, 3; and dimension of point objects, 4. In the Matlab application software package, images of the reference GrPO are constructed (Figure 9a). Visual separation of GrPO is carried out using a color scheme. The positions of the point objects of each reference GrPO are marked with triangular markers, the starting points are square. The lines connecting the point objects form the contours corresponding to the chain representation of the GrPO. The contours of the vector-field models of the reference GrPO (Figure 9a) are formed using expression (4) in the Matlab environment. The images of the contours of the reference vector-field models are constructed in Matlab (Figure 9b). The color scheme of the contours of the vector-field models , marking the starting point of the contour and the ends of the vectors forming the contour corresponds to the designation GrPO (Figure 9a). The signal GrPO was obtained by shifting the starting point, , scaling factor, , and rotation angle, , of the reference radius vectors of the reference vector of the signal GrPO. In order to simplify modeling, we set the zero shift of the starting point, , a scale of , and a rotation angle of .
- The creation of an interference situation caused by coordinate noise with contour, , along with the omission of signals, , and the appearance of false marks, . This study was carried out within the framework of an additive model defined by the expression, , where is the contour of the noisy GrPO, is the contour of the signal GrPO, and is the noise contour. The level of coordinate noise was set in the source data as the value of the signal-to-noise ratio by converting to the standard deviation using the expression:where is the signal-to-noise ratio.
- 3.
- The normalization and centering of the reference, , and signal, , contours of the vector-field model allows us to eliminate the uncertainty caused by scaling the contours. The reference contour, , corresponding to the signal contour, , in the adopted implementation, , was selected as the reference contour, .
- 4.
- The recognition of the signal GrPO. The best noise immunity, when recognizing a GrPO against a background of coordinate noise, is provided by a contour-matched filter (6) that maximizes the signal-to-noise ratio at its output. The direct calculation of the correlation function by the filter is limited by the following factors:
- The discrepancy between the dimensions of the reference contour and the signal one due to the appearance of false marks and the disappearance of signal marks;
- The violation of the order of the point marks in the signal circuit as a result of the ordering of point marks.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Witman, R.L.; Rear, R.L.O. Automating clustering of synthetic aperture radar (SAR) targete. IEEE. Naecon. 1980, 3, 717–724. [Google Scholar]
- Krajčovič, S.; Šilha, J.; Zigo, M.; Ďurikovič, R. The Image Processing System for Ultra-Fast Moving Space Debris Objects. Arab. J. Sci. Eng. 2023, 1–6. [Google Scholar] [CrossRef]
- Frank, Y.S. Mathematical Morphology. In Image Processing and Pattern Recognition: Fundamentals and Techniques; IEEE: Piscataway, NJ, USA, 2010; pp. 63–118. [Google Scholar] [CrossRef]
- Li, Z.N.; Drew, M.S.; Liu, J. Graphics and Image Data Representations. In Fundamentals of Multimedia; Springer: Berlin/Heidelberg, Germany, 2014; pp. 57–80. ISBN 978-3-319-05289-2. [Google Scholar] [CrossRef]
- Li, Z.; Ma, L.; Chen, M.; Xiao, J.; Gu, Q. Patch Similarity Aware Data-Free Quantization for Vision Transformers. In Computer Vision—ECCV 2022; Lecture Notes in Computer Science; Avidan, S., Brostow, G., Cissé, M., Farinella, G.M., Hassner, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2022; p. 13671. [Google Scholar] [CrossRef]
- Burger, W.; Burge, M.J. Image Matching and Registration. In Digital Image Processing; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Furman, Y.A.; Krevetsky, A.V.; Peredreyev, A.K.; Rozentsov, A.A.; Hafizov, R.G.; Yegoshina, I.L.; Leukhin ANFurman, Y. Contour Analysis Introduction and Its Image and Signal Processing Application. In International Academic Publishing Company “Nauka”; Russian Academy of Sciences: Moscow, Russia, 2002; 592p. [Google Scholar]
- Qiao, W.; Zhao, Y.; Xu, Y.; Lei, Y.; Wang, Y.; Yu, S.; Li, H. Deep learning-based pixel-level rock fragment recognition during tunnel excavation using instance segmentation model. Tunn. Undergr. Space Technol. 2021, 115, 104072. [Google Scholar] [CrossRef]
- Cremers, D.; Soatto, S. Motion Competition: A Variational Approach to Piecewise Parametric Motion Segmentation. Int. J. Comput. Vis. 2005, 62, 249–265. [Google Scholar] [CrossRef]
- Martin, P.; Refregier, P.; Goudail, F.; Guerault, F. Influence of the noise model on level set active contour segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 799–803. [Google Scholar] [CrossRef] [PubMed]
- Ďuriš, V.; Semenov, V.I.; Chumarov, S.G. Wavelets and digital filters designed and synthesized in the time and frequency domains. Math. Biosci. Eng. 2022, 19, 3056–3068. [Google Scholar] [CrossRef] [PubMed]
- Ďuriš, V.; Chumarov, S.G.; Mikheev, G.M.; Mikheev, K.G.; Semenov, V.I. The Orthogonal Wavelets in the Frequency Domain Used for the Images Filtering. IEEE Access 2020, 8, 211125–211134. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, L.; Eslami, H. A Mathematical Model of PCNN for Image Fusion with Non-Sampled Contourlet Transform. In Applied Mathematics and Nonlinear Sciences; Sciendo: Warsaw, Poland, 2022. [Google Scholar] [CrossRef]
- Yang, X.; Zeng, J.; Xu, C.; Peng, L.; Alsultan, J. Modeling of Fractional Differential Equation in Cloud Computing Image Fusion Algorithm. In Applied Mathematics and Nonlinear Sciences; Sciendo: Warsaw, Poland, 2022. [Google Scholar] [CrossRef]
- Aram, M.; Abessi, O. Optimal design of green buildings using computational fluid dynamics and climate simulation tools. Int. J. Environ. Sci. Technol. 2019, 17, 917–932. [Google Scholar] [CrossRef]
- Cai, W. Chinese Painting and Calligraphy Image Recognition Technology Based on Pseudo Linear Directional Diffusion Equation. In Applied Mathematics and Nonlinear Sciences; Sciendo: Warsaw, Poland, 2022. [Google Scholar] [CrossRef]
- Dharmik, R.C.; Chavhan, S.; Gotarkar, S.; y Pasoriya, A. Rice quality analysis using image processing and machine learning. 3C TIC. Cuad. Desarro. Apl. A Las TIC 2022, 11, 158–164. [Google Scholar] [CrossRef]
- Paikrao, P.; Doye, D.; Bhalerao, M.; Vaidya, M. Verification of role of data scanning direction in image compression using fuzzy composition operations. 3C Tecnología. Glosas Innovación Apl. A Lapyme 2022, 11, 38–49. [Google Scholar] [CrossRef]
- Paikrao, P.; Doye, D.; Bhalerao, M.; y Vaidya, M. Near-lossless compression scheme using hamming codes for non-textual important regions in document images. 3C TIC. Cuad. Desarro. Apl. A Las TIC 2022, 11, 225–237. [Google Scholar] [CrossRef]
- Furman, Y.A.; Krevetsky, A.V.; Rozentsov, A.A.; Hafizov, R.G.; Leukhin, A.N.; Yegoshina, I.L. Complex and Hypercomplex System at Tasks of Multidimensional Signal Processing; Fizmatlit: Moscow, Russia, 2023; p. 456. [Google Scholar]
- Rozentsov, A.; Evdokimov, A.; Grigoriev, A. Recognition of flat images of group point objects in the presence of detection errors. Instrumentation 2006, 49, 59–64. [Google Scholar]
- McNally, W.; Vats, K.; Wong, A.; McPhee, J. Rethinking Keypoint Representations: Modeling Keypoints and Poses as Objects for Multi-person Human Pose Estimation. In Computer Vision—ECCV 2022; Lecture Notes in Computer Science; Avidan, S., Brostow, G., Cissé, M., Farinella, G.M., Hassner, T., Eds.; Springer: Cham, Switzerland, 2022; p. 13666. [Google Scholar] [CrossRef]
- Berry, K.J.; Kvamme, K.L.; Johnston, J.E.; Mielke, P.W., Jr. Permutation Statistical Methods. In Permutation Statistical Methods with R; Springer: Cham, Switzerland, 2021; ISBN 978-3-030-74360-4. [Google Scholar] [CrossRef]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ďuriš, V.; Grigoriev, A.V.; Chumarov, S.G. Image Recognition of Group Point Objects under Interference Conditions. Electronics 2023, 12, 2537. https://doi.org/10.3390/electronics12112537
Ďuriš V, Grigoriev AV, Chumarov SG. Image Recognition of Group Point Objects under Interference Conditions. Electronics. 2023; 12(11):2537. https://doi.org/10.3390/electronics12112537
Chicago/Turabian StyleĎuriš, Viliam, Anatoly V. Grigoriev, and Sergey G. Chumarov. 2023. "Image Recognition of Group Point Objects under Interference Conditions" Electronics 12, no. 11: 2537. https://doi.org/10.3390/electronics12112537
APA StyleĎuriš, V., Grigoriev, A. V., & Chumarov, S. G. (2023). Image Recognition of Group Point Objects under Interference Conditions. Electronics, 12(11), 2537. https://doi.org/10.3390/electronics12112537