
Study on Static Characteristics of Ultra-Precision Aerostatic Motorized Spindle under Gas–Magnetic Field Coupling


Abstract
:1. Introduction
2. Mathematical Models
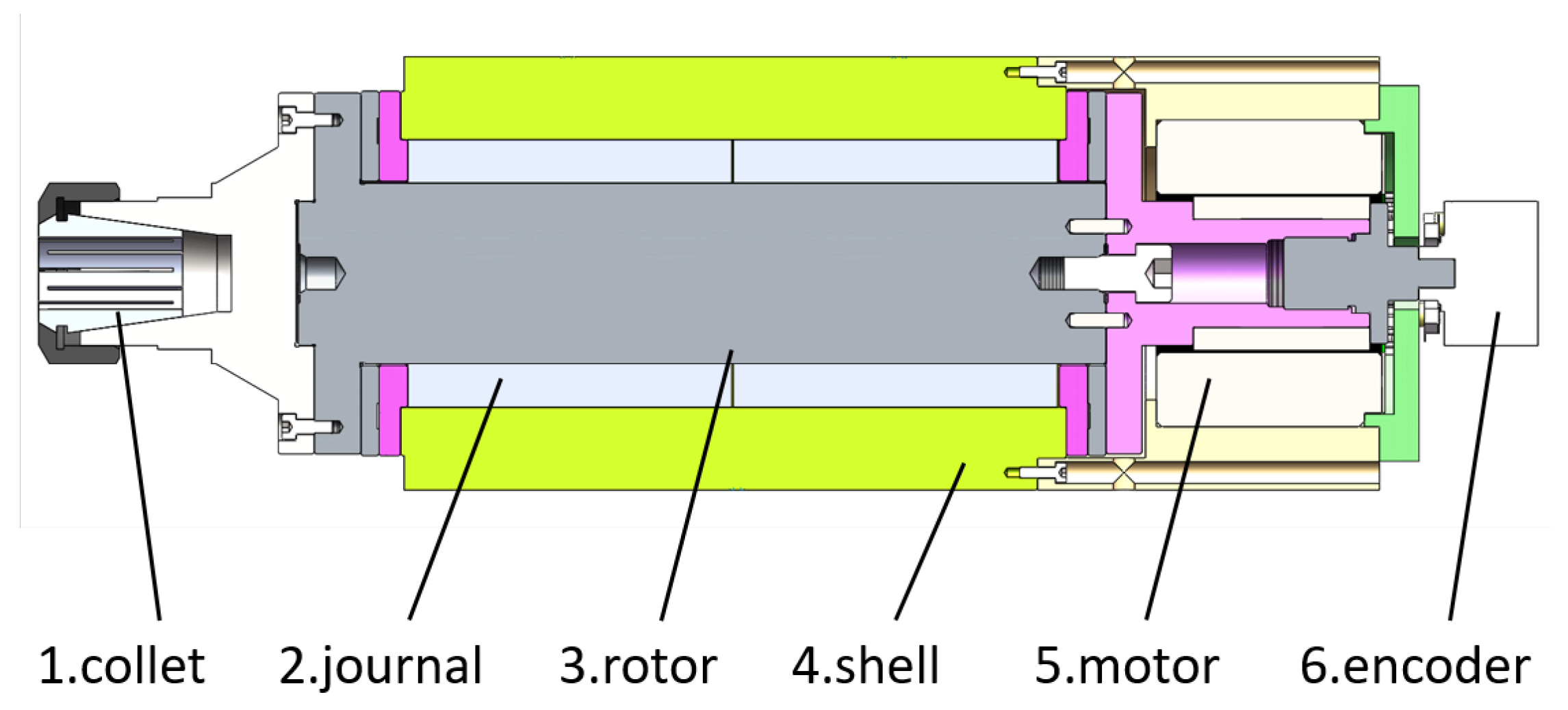
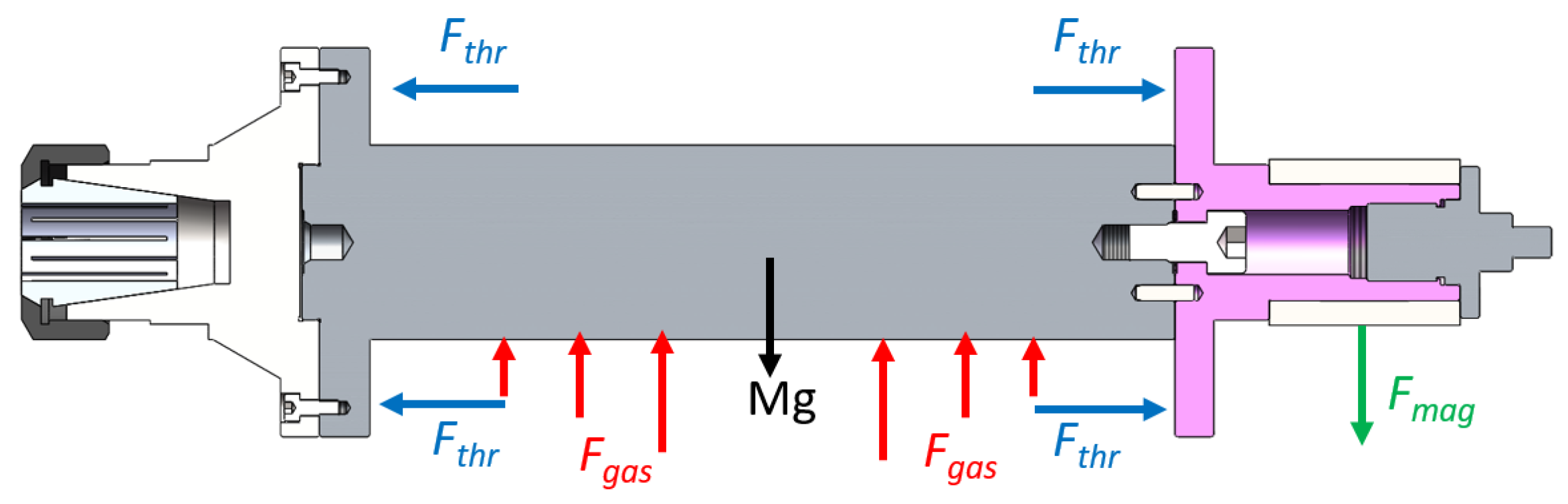
2.1. Physical Model Structure
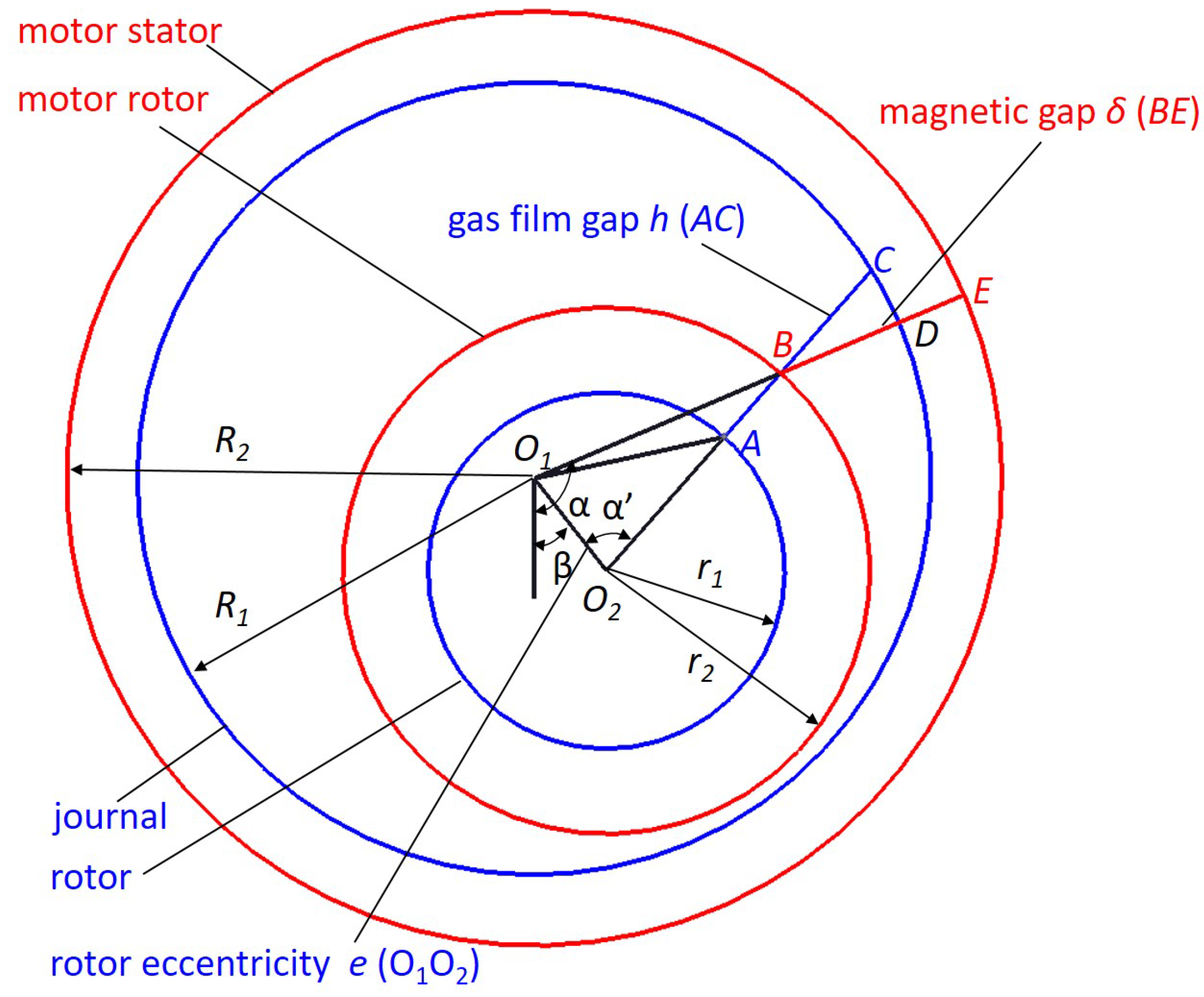
2.2. Simplified Error Estimation of Gas Film Gap and Magnetic Gap
2.3. Gas Film Force
2.3.1. Boundary Conditions
2.3.2. Reynolds Equation of Gas Lubrication
2.3.3. Calculation of Gas Film Flow
2.4. Unbalanced Magnetic Pull (UMP)
2.5. Gas–Magnetic Field Coupling Equation and Calculation
3. Results and Discussion
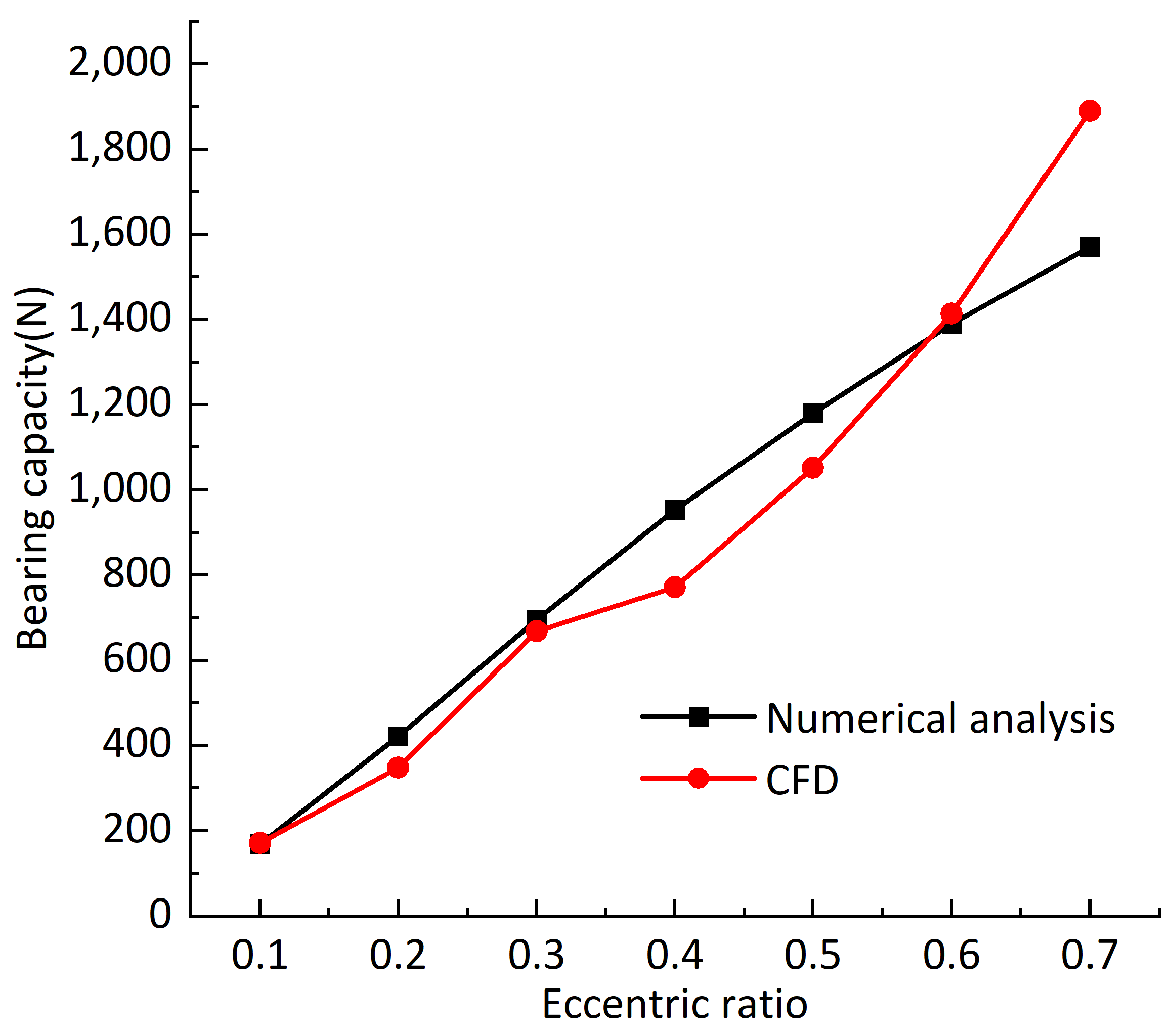
3.1. Correctness Verification of Calculation Method
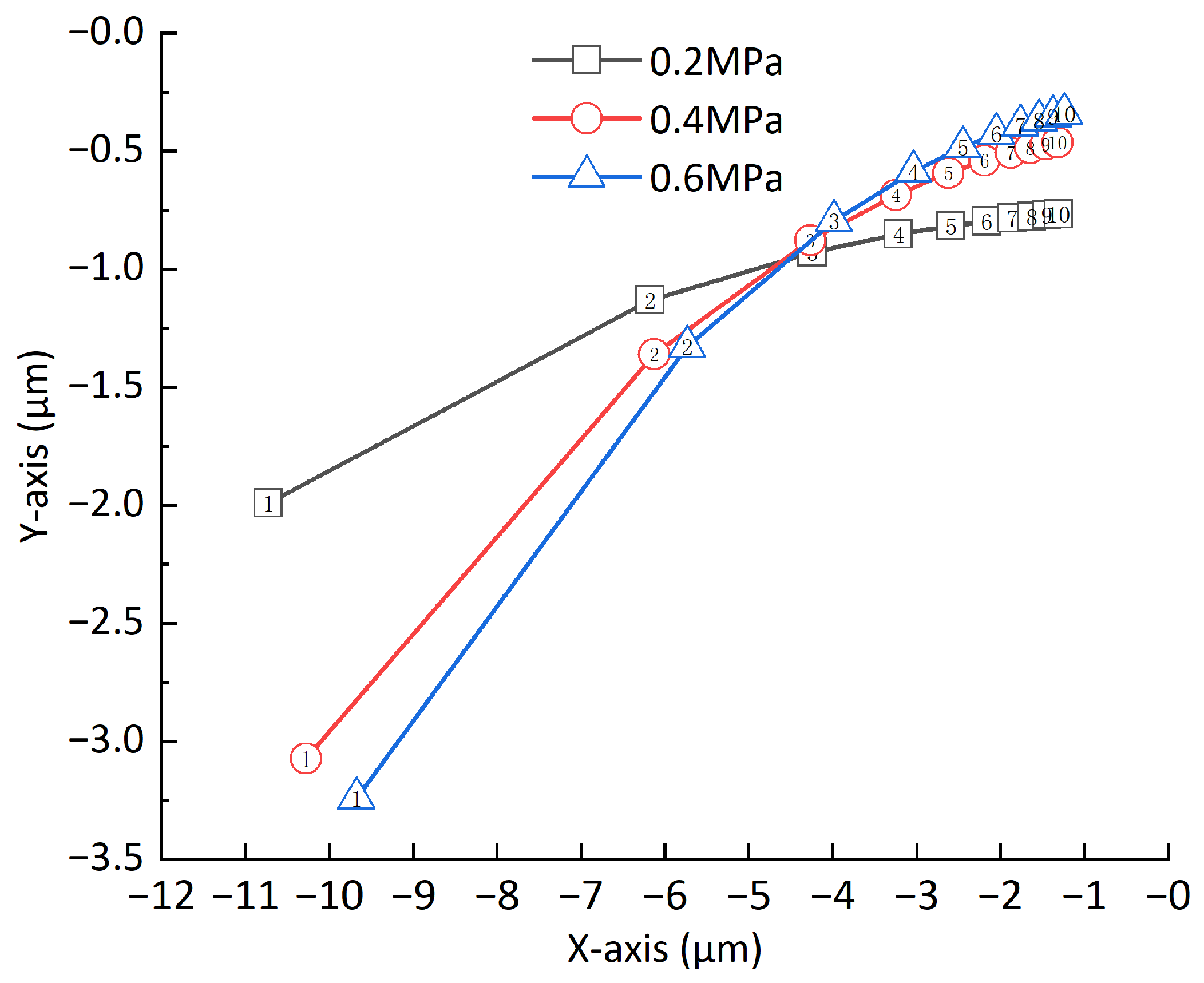
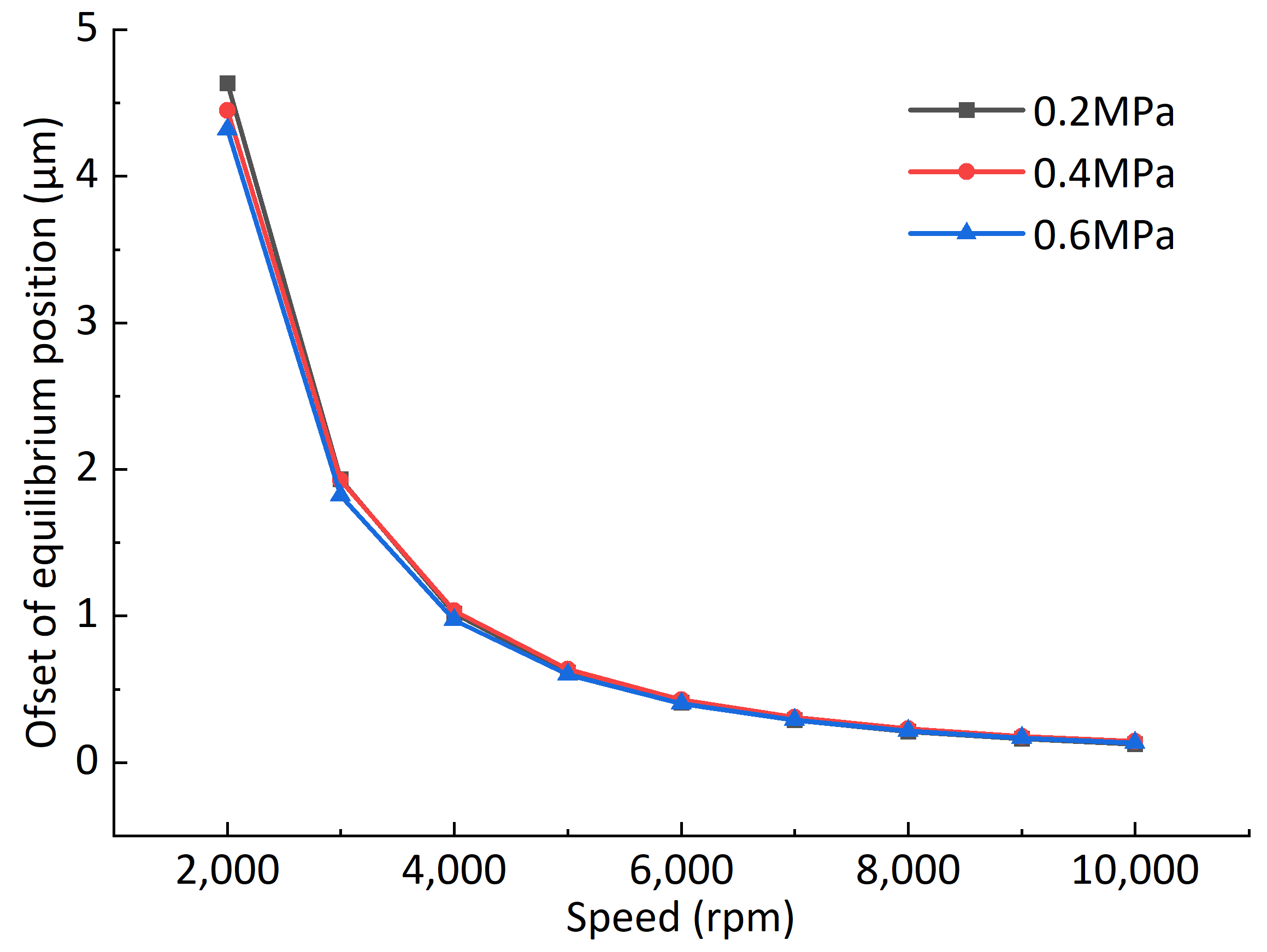
3.2. Effect of Rotational Speed and Gas Supply Pressure on Rotor Equilibrium Position
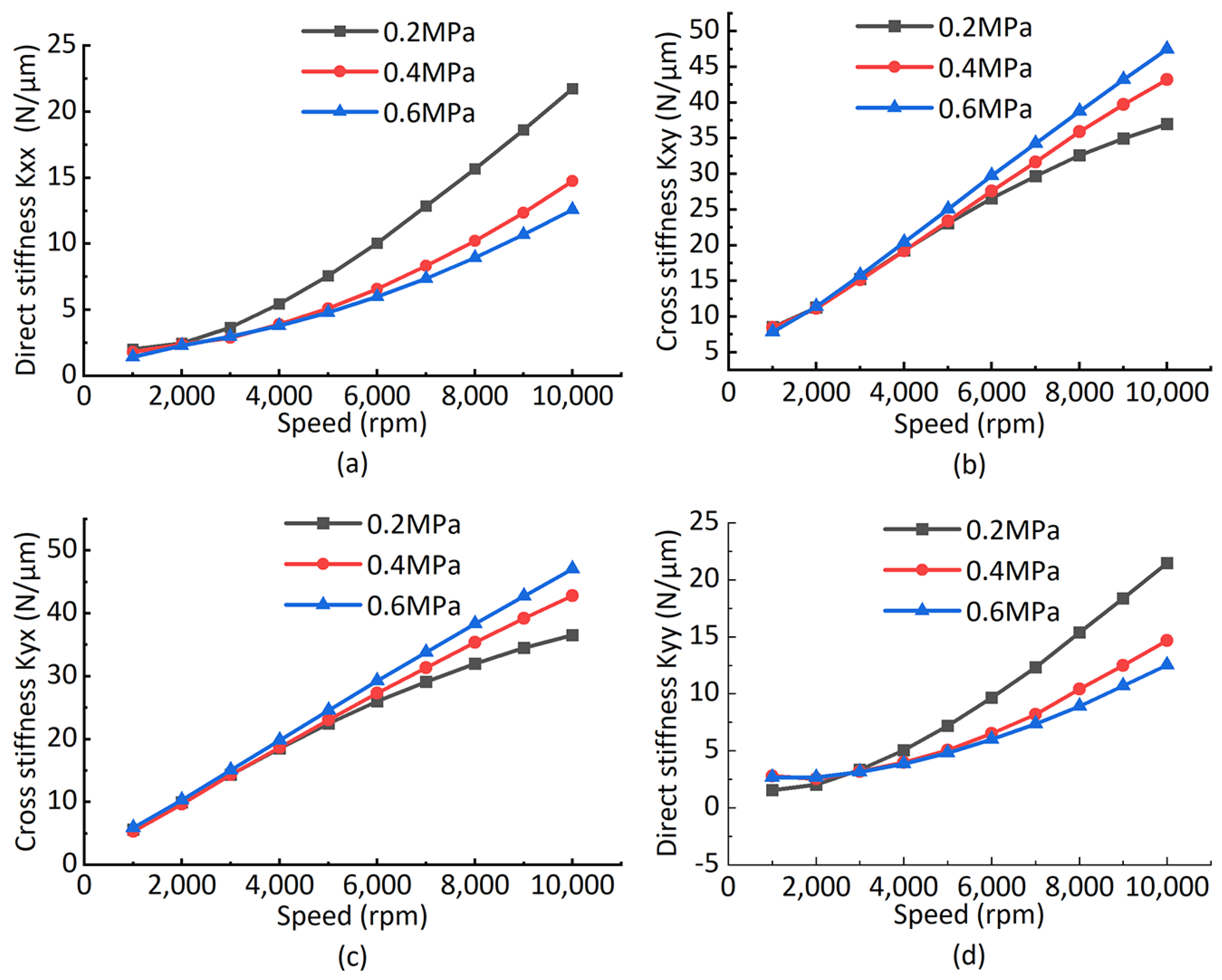
3.3. Effect of Equilibrium Position on Bearing Stiffness
3.4. Influence of the UMP on Rotor Equilibrium Position
4. Conclusions
- Due to the dynamic pressure effect, the rotor equilibrium position will gradually move to the journal center with the increase in rotational speed, and the moving amplitude is approximately 0.15–4.5 m; the offset amplitude decreases gradually with the increase in rotating speed. Thus, when the rotor works continuously at different speeds, it is necessary to remeasure the rotor position to obtain higher positioning accuracy.
- With the increase in rotational speed, the direct stiffness and cross stiffness at the rotor equilibrium position increase at the same time. The cross stiffness is greater than the direct stiffness. The higher the air supply pressure is, the greater the cross stiffness at the rotor equilibrium position is and the smaller the direct stiffness is. Therefore, the load direction during operation should avoid the X and Y directions to reduce the disturbance to the rotor, so as to obtain better stability.
- The unbalanced magnetic pull (UMP) will affect the rotor equilibrium position, and the influence degree increases sharply with the increase in rotor eccentricity. The influence range of the unbalanced magnetic pull (UMP) caused by rotor eccentricity on the equilibrium position is approximately 0.001–0.02 m. The effect can be reduced by increasing the rotational speed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gao, Q.; Chen, W.; Lu, L.; Huo, D.; Cheng, K. Aerostatic bearings design and analysis with the application to precision engineering: State-of-the-art and future perspectives. Tribol. Int. 2019, 135, 1–17. [Google Scholar] [CrossRef]
- Karpat, Y. Influence of diamond tool chamfer angle on surface integrity in ultra-precision turning of singe crystal silicon. Int. J. Adv. Manuf. Technol. 2019, 101, 1565–1572. [Google Scholar] [CrossRef]
- Nanotech 250UPL V2 Ultra Precision Lathe. Available online: https://nanotechsys.com/machines/nanotech-250uplv2-ultra-precision-lathe/ (accessed on 3 April 2022).
- Zhang, G.; Zheng, J.; Yu, H.; Zhao, R.; Shi, W.; Wang, J. Rotation Accuracy Analysis of Aerostatic Spindle Considering Shaft’s Roundness and Cylindricity. Appl. Sci. 2021, 11, 7912. [Google Scholar] [CrossRef]
- Kim, U.; Lieu, D.K. Magnetic field calculation in permanent magnet motors with rotor eccentricity: Without slotting effect. IEEE Trans. Magn. 1998, 34, 2243–2252. [Google Scholar] [CrossRef]
- Di, C.; Bao, X.; Wang, H.; Lv, Q.; He, Y. Modeling and analysis of unbalanced magnetic pull in cage induction motors with curved dynamic eccentricity. IEEE Trans. Magn. 2015, 51, 1–7. [Google Scholar]
- Li, J.; Liu, Z.; Nay, L. Effect of radial magnetic forces in permanent magnet motors with rotor eccentricity. IEEE Trans. Magn. 2007, 43, 2525–2527. [Google Scholar] [CrossRef]
- Dorrell, D.G.; Popescu, M.; Ionel, D.M. Unbalanced Magnetic Pull Due to Asymmetry and Low-Level Static Rotor Eccentricity in Fractional-Slot Brushless Permanent-Magnet Motors with Surface-Magnet and Consequent-Pole Rotors. IEEE Trans. Magn. 2010, 46, 2675–2685. [Google Scholar] [CrossRef]
- Xiang, C.; Liu, F.; Liu, H.; Han, L.; Zhang, X. Nonlinear dynamic behaviors of permanent magnet synchronous motors in electric vehicles caused by unbalanced magnetic pull. J. Sound Vib. 2016, 371, 277–294. [Google Scholar] [CrossRef]
- Kim, U.; Lieu, D.K. Effects of magnetically induced vibration force in brushless permanent-magnet motors. IEEE Trans. Magn. 2005, 41, 2164–2172. [Google Scholar] [CrossRef]
- Kim, D.; Noh, M.D.; Park, Y.w. Unbalanced magnetic forces due to rotor eccentricity in a toroidally wound BLDC motor. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef]
- Zhang, Y.; Geng, H.; Zhou, J.; YU, L. Analytical calculation for magnetic field of permanent magnet synchronous motors with rotor eccentricity. J. Xi’an Jiaotong Univ. 2019, 53, 96–103. [Google Scholar]
- Han, X.; Palazzolo, A. Unstable force analysis for induction motor eccentricity. J. Sound Vib. 2016, 370, 230–258. [Google Scholar] [CrossRef]
- Kim, H.; Nerg, J.; Choudhury, T.; Sopanen, J.T. Rotordynamic simulation method of induction motors including the effects of unbalanced magnetic pull. IEEE Access 2020, 8, 21631–21643. [Google Scholar] [CrossRef]
- Guo, D.; Chu, F.; Chen, D. The unbalanced magnetic pull and its effects on vibration in a three-phase generator with eccentric rotor. J. Sound Vib. 2002, 254, 297–312. [Google Scholar] [CrossRef]
- Liu, H.; Wu, Y.; Wang, X.; Yan, P.; Zhang, X. Nonlinear normal modes and primary resonance for permanent magnet synchronous motors with a nonlinear restoring force and an unbalanced magnetic pull. Nonlinear Dyn. 2019, 97, 1197–1213. [Google Scholar] [CrossRef]
- Gustavsson, R.K.; Aidanpää, J.O. The influence of nonlinear magnetic pull on hydropower generator rotors. J. Sound Vib. 2006, 297, 551–562. [Google Scholar] [CrossRef]
- Zhao, D.; Dang, W.; Sun, W.; Guo, P. Influence of unbalanced magnetic pull on rub-impact rotor-bearing system. J. Huazhong Univ. Sci. Technol. 2019, 47, 34–39. [Google Scholar]
- Zhang, S.; Li, Z.; Xiong, Z. A theoretical and experimental study of forced spindle vibration under unbalanced magnetic forces in ultra-precision machining. Int. J. Adv. Manuf. Technol. 2019, 103, 4689–4694. [Google Scholar] [CrossRef]
- Gao, S.; Cheng, K.; Ding, H.; Fu, H. Multiphysics-based design and analysis of the high-speed aerostatic spindle with application to micro-milling. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2016, 230, 852–871. [Google Scholar] [CrossRef]
- Belforte, G.; Raparelli, T.; Viktorov, V.; Trivella, A.; Colombo, F. An experimental study of high-speed rotor supported by air bearings: Test RIG and first experimental results. Tribol. Int. 2006, 39, 839–845. [Google Scholar] [CrossRef]
- Zhang, S.; To, S.; Zhang, G.; Zhu, Z. A review of machine-tool vibration and its influence upon surface generation in ultra-precision machining. Int. J. Mach. Tools Manuf. 2015, 91, 34–42. [Google Scholar] [CrossRef]
- Chen, X.; Xu, J.; Fang, H.; Tian, R. Influence of cutting parameters on the ductile-brittle transition of single-crystal calcium fluoride during ultra-precision cutting. Int. J. Adv. Manuf. Technol. 2017, 89, 219–225. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, W.; Liang, Y.; An, C.; Chen, G.; Su, H. Dynamic error budget analysis of an ultraprecision flycutting machine tool. Int. J. Adv. Manuf. Technol. 2015, 76, 1215–1224. [Google Scholar] [CrossRef]
- Cheung, C.F.; To, S.; Lee, W.B. Anisotropy of surface roughness in diamond turning of brittle single crystals. Mater. Manuf. Process. 2002, 17, 251–267. [Google Scholar] [CrossRef]
- To, S.; Cheung, C.F.; Lee, W.B. Influence of material swelling on surface roughness in diamond turning of single crystals. Mater. Sci. Technol. 2001, 17, 102–108. [Google Scholar] [CrossRef]
- Zhang, S.; To, S.; Cheung, C.F.; Wang, H. Dynamic characteristics of an aerostatic bearing spindle and its influence on surface topography in ultra-precision diamond turning. Int. J. Mach. Tools Manuf. 2012, 62, 1–12. [Google Scholar] [CrossRef]
- Jiangming, N. Dynamic stability and debugging of aerostatic-pressurized bearings in magnetic disk comprehensive instrumentation. J. Huazhong Univ. Sci. Technol. 1985, 13, 69–74. [Google Scholar]
- Ansys Fluent. Available online: https://www.ansys.com/zh-cn/products/fluids/ansys-fluent (accessed on 3 April 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Journal radius (mm) | 25 |
| Motor stator radius (mm) | 21.89 |
| Journal length (mm) | 160 |
| Motor length (mm) | 62.5 |
| Throttle slit width H (m) | 80 |
| Slit depth Y (mm) | 20 |
| Mean gas film gap () (m) | 20 |
| Mean magnetic gap () (mm) | 0.58 |
| Environment pressure () (mm) (MPa) | 0.1 |
| Number of slits | 5 |
| Circumferential slit angle | 4/15 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Song, P.; Yu, H.; Zhang, G. Study on Static Characteristics of Ultra-Precision Aerostatic Motorized Spindle under Gas–Magnetic Field Coupling. Electronics 2022, 11, 1434. https://doi.org/10.3390/electronics11091434
Wang W, Song P, Yu H, Zhang G. Study on Static Characteristics of Ultra-Precision Aerostatic Motorized Spindle under Gas–Magnetic Field Coupling. Electronics. 2022; 11(9):1434. https://doi.org/10.3390/electronics11091434
Chicago/Turabian StyleWang, Wenbo, Pengyun Song, Hechun Yu, and Guoqing Zhang. 2022. "Study on Static Characteristics of Ultra-Precision Aerostatic Motorized Spindle under Gas–Magnetic Field Coupling" Electronics 11, no. 9: 1434. https://doi.org/10.3390/electronics11091434
APA StyleWang, W., Song, P., Yu, H., & Zhang, G. (2022). Study on Static Characteristics of Ultra-Precision Aerostatic Motorized Spindle under Gas–Magnetic Field Coupling. Electronics, 11(9), 1434. https://doi.org/10.3390/electronics11091434