
Fault Diagnosis Method of Six-Phase Permanent Magnet Synchronous Motor Based on Vector Space Decoupling


Abstract
:1. Introduction
2. Mathematical Model of the Six-Phase Permanent Magnet Synchronous Motor
3. Open Phase Fault Diagnosis Strategy
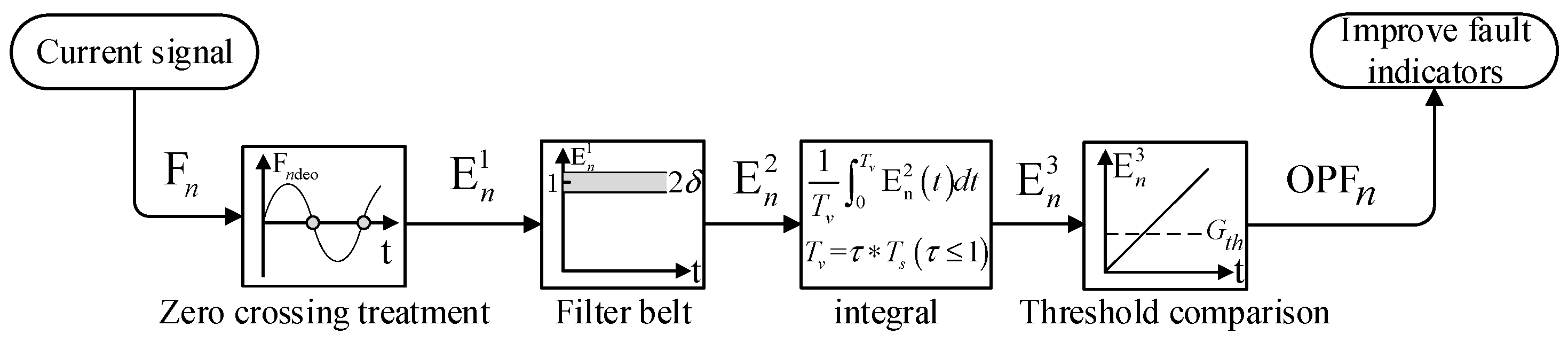
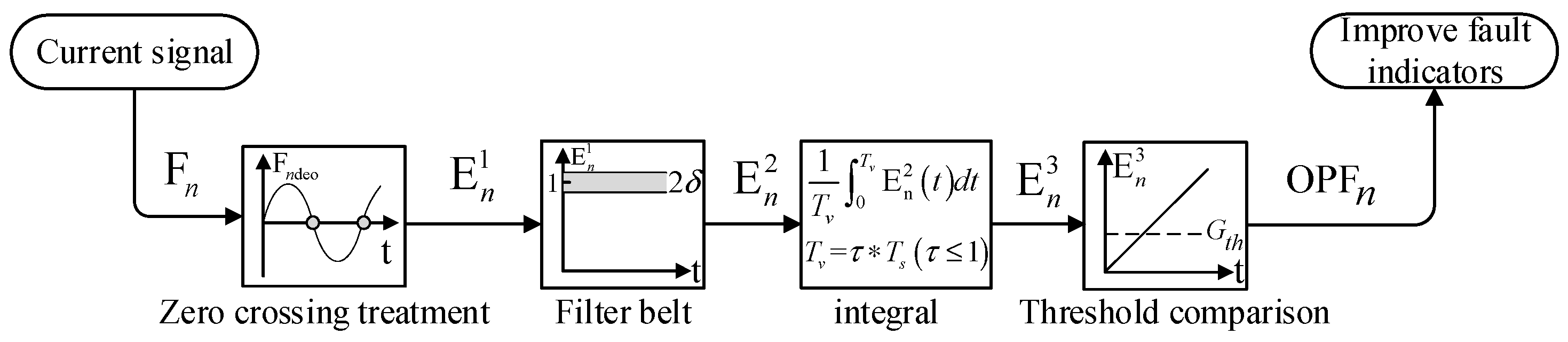
3.1. Calculation of the Phase Failure Index
3.2. Optimization Scheme of the Winding Open Circuit Fault Index
4. Power Switch Fault Diagnosis Strategy
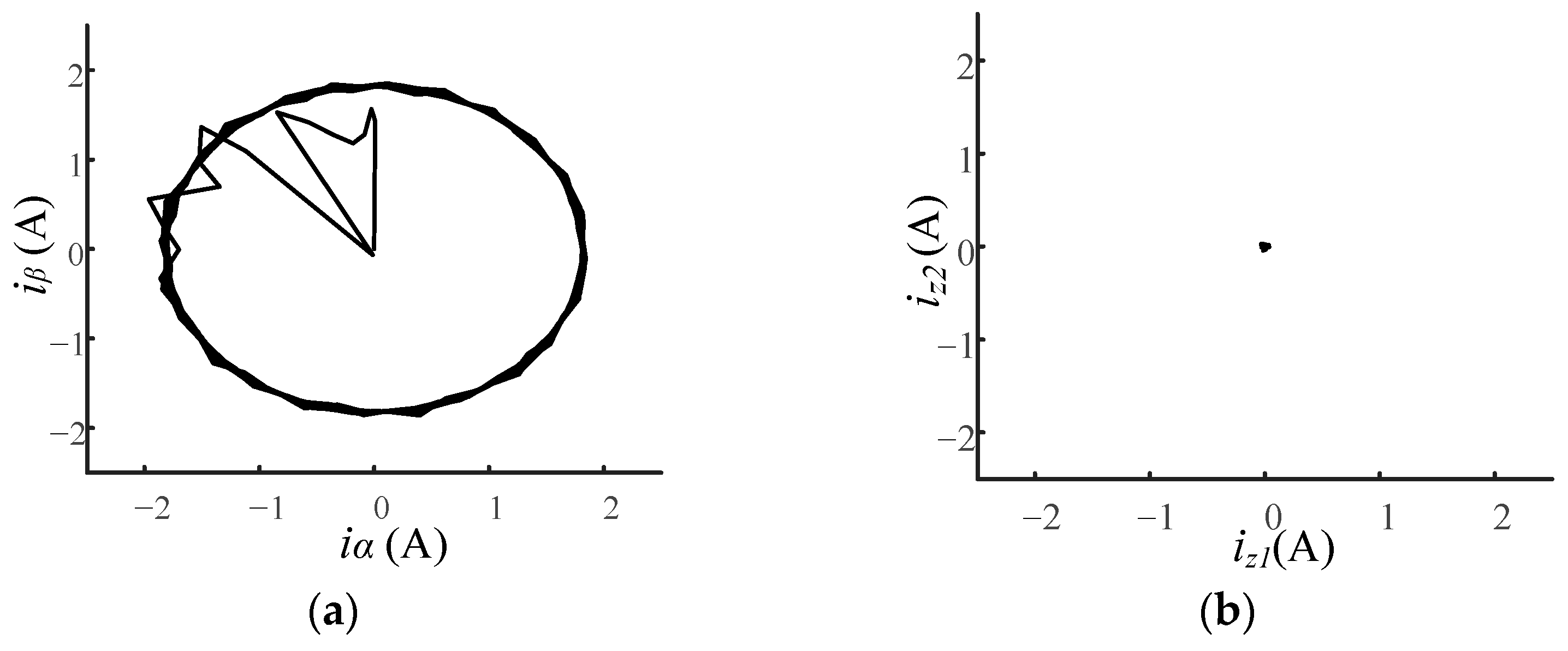
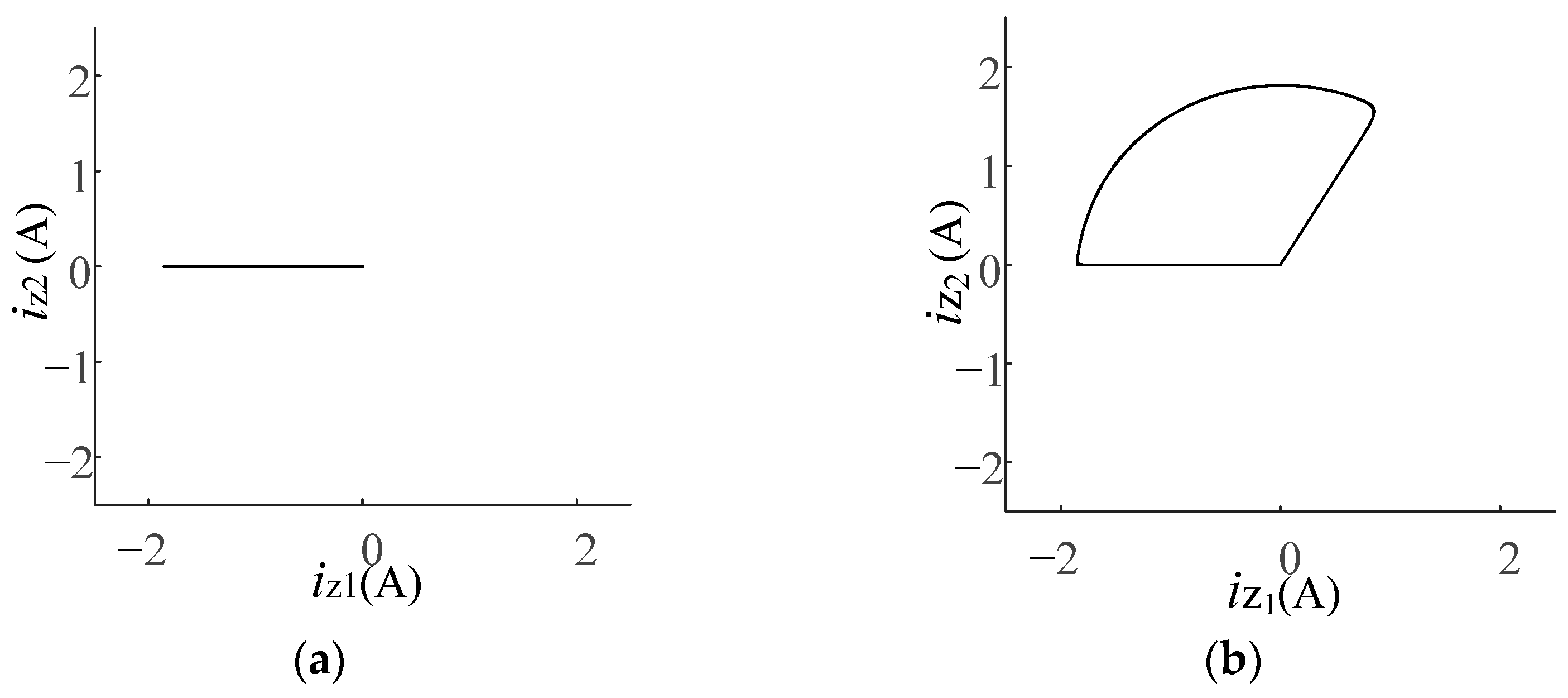
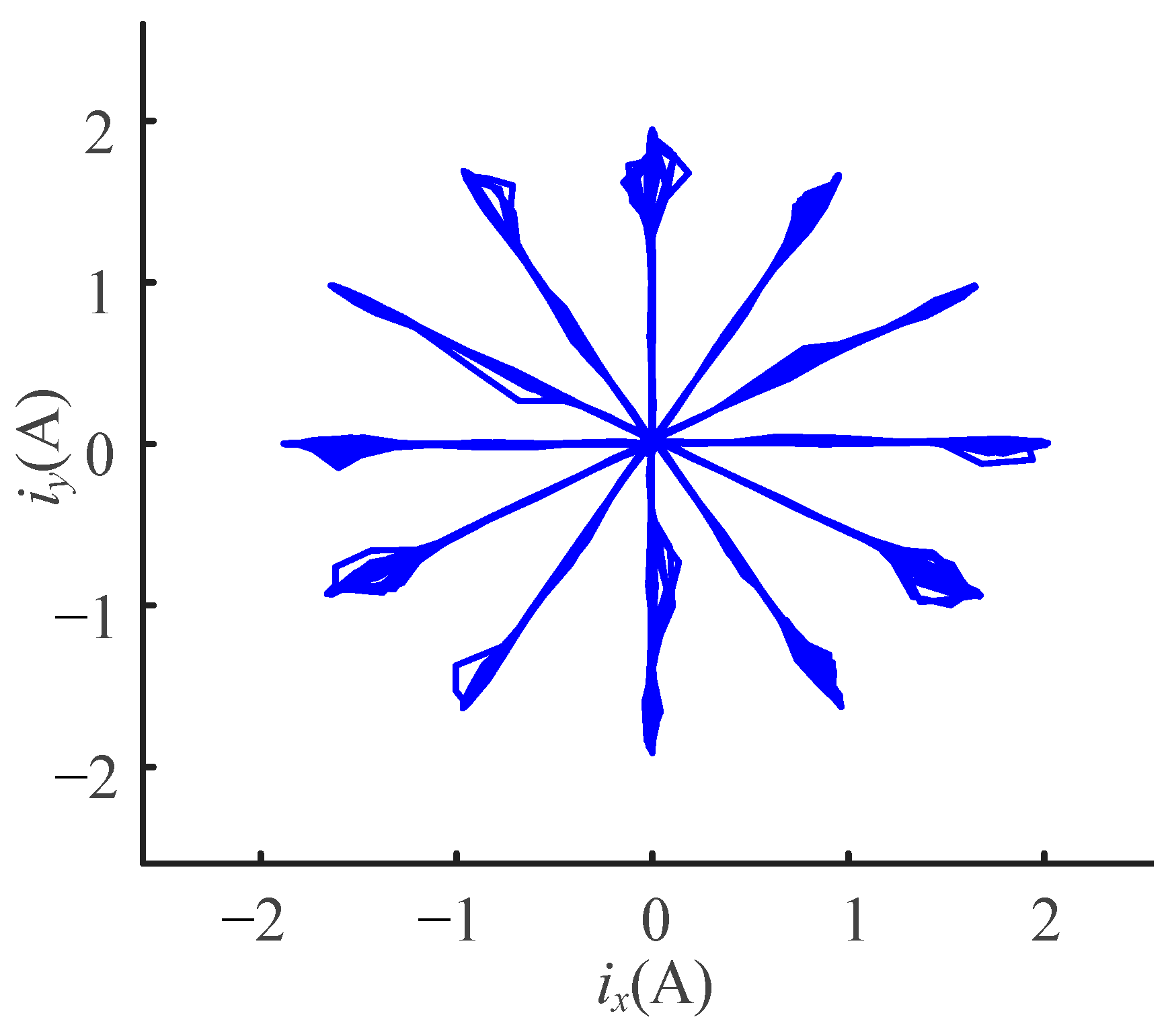
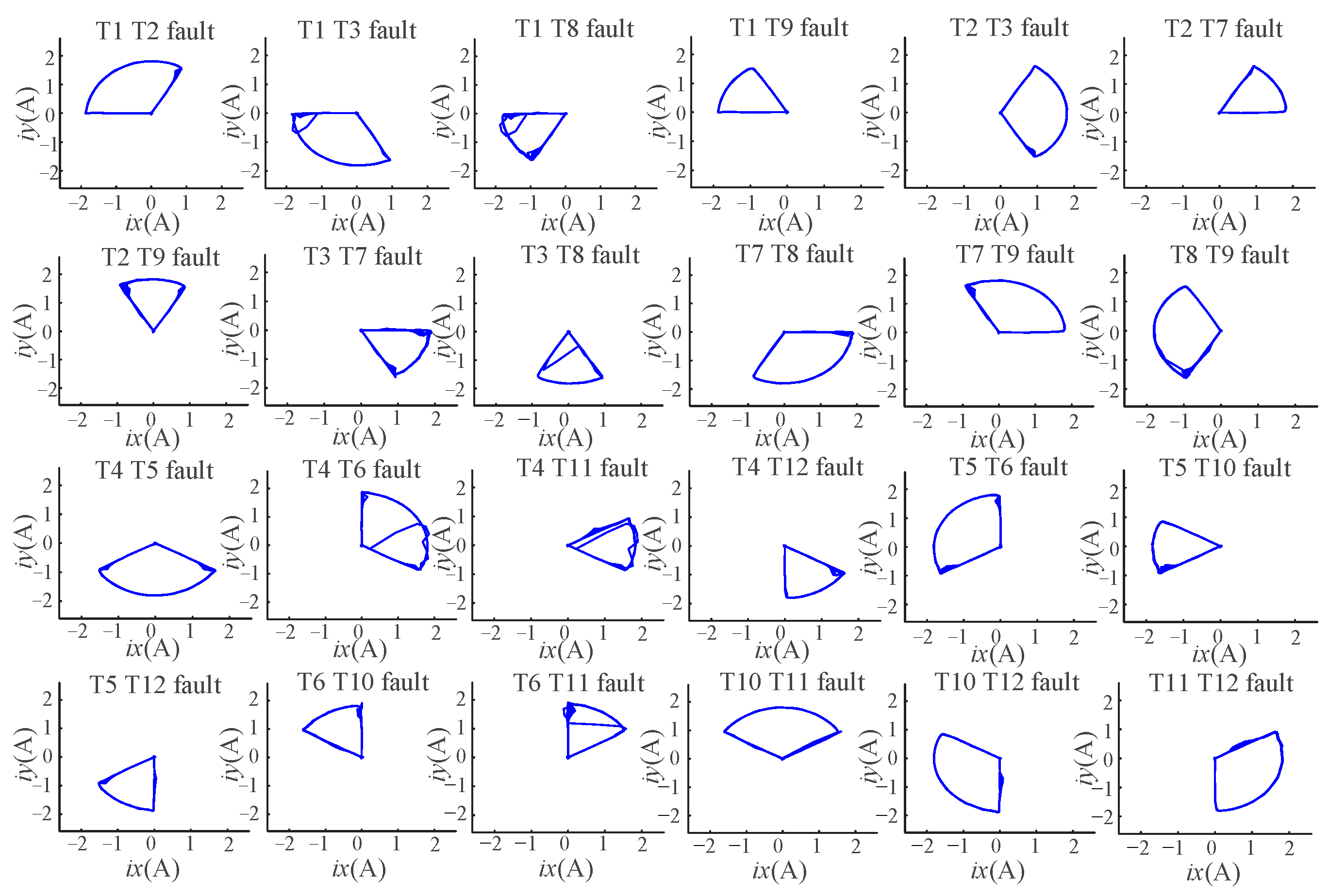
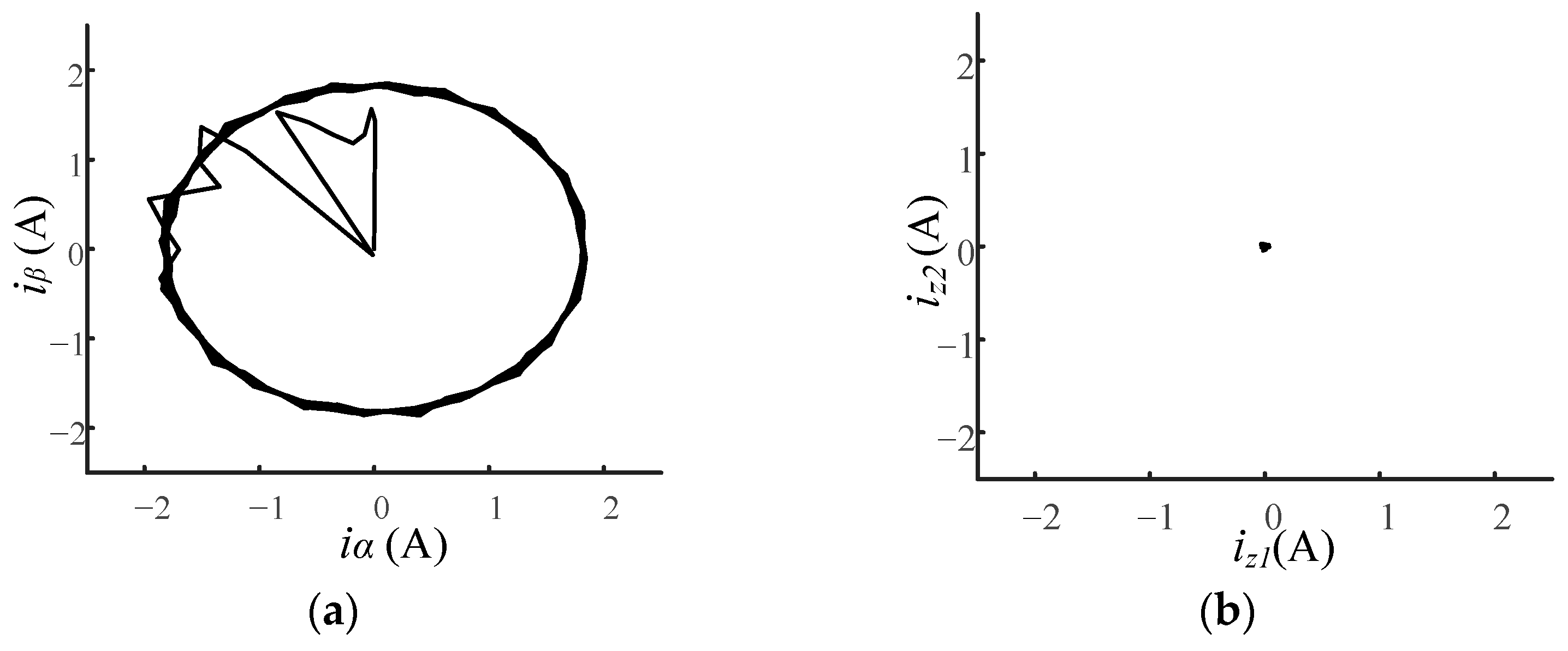
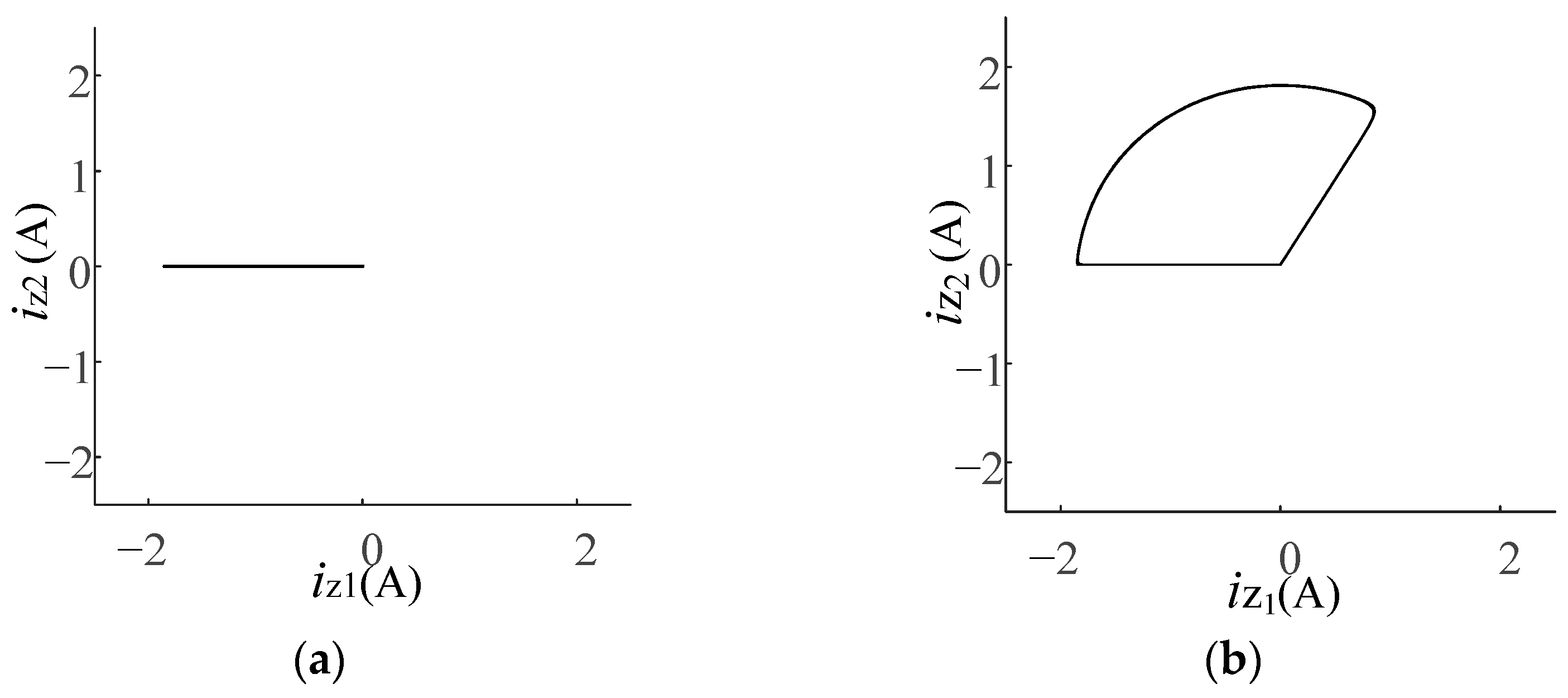
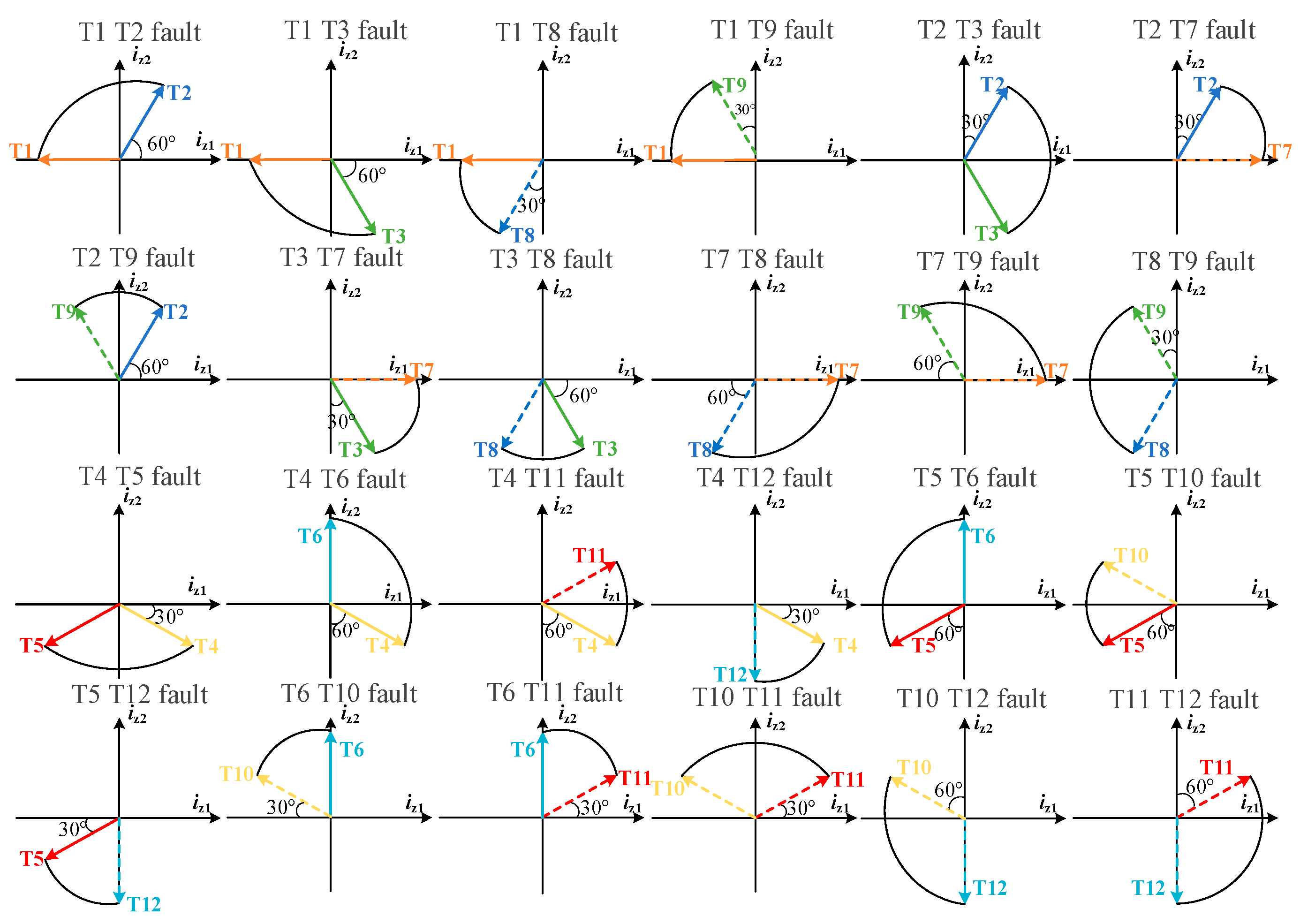
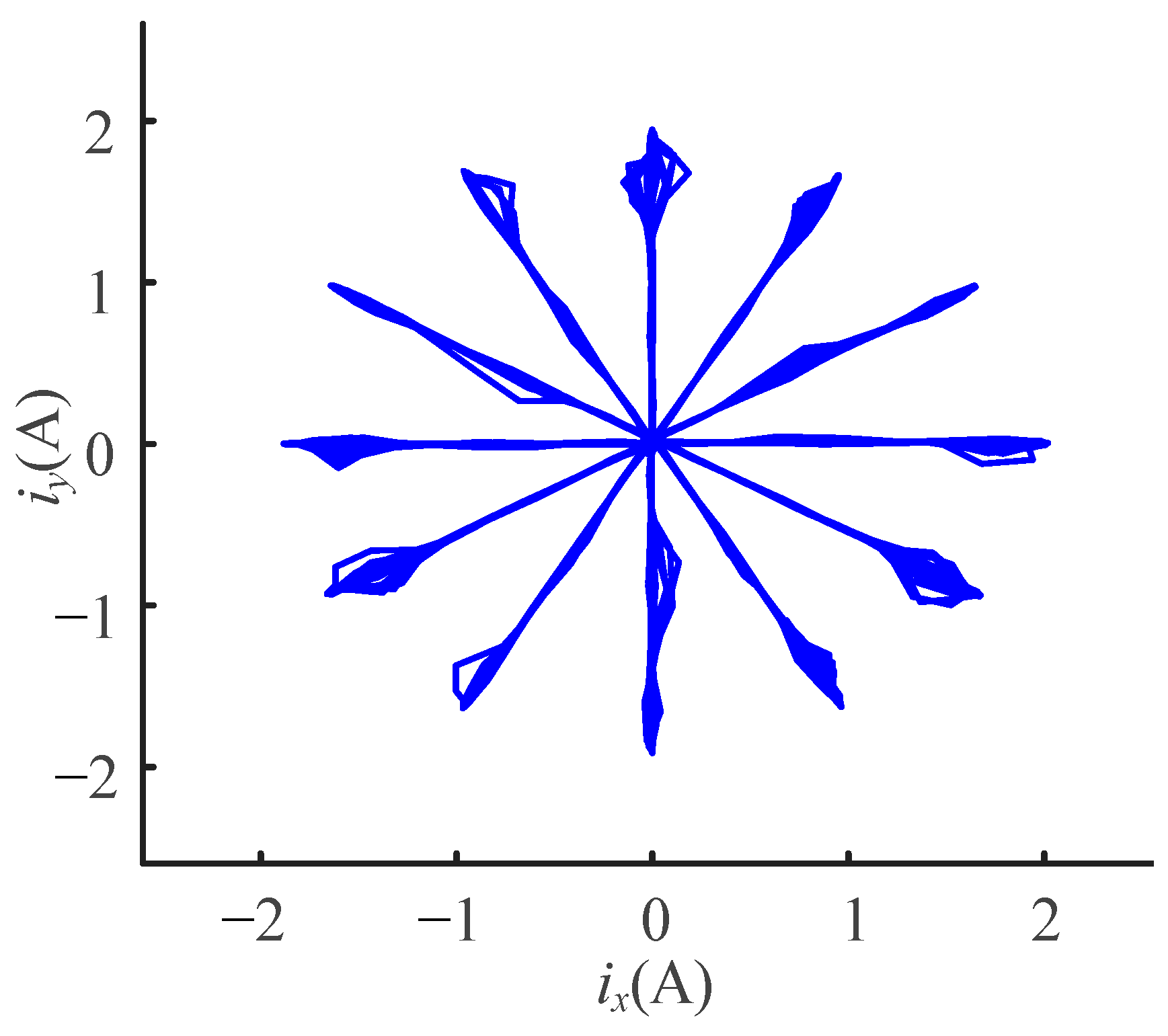
4.1. Harmonic Plane Current Fault Trace Analysis
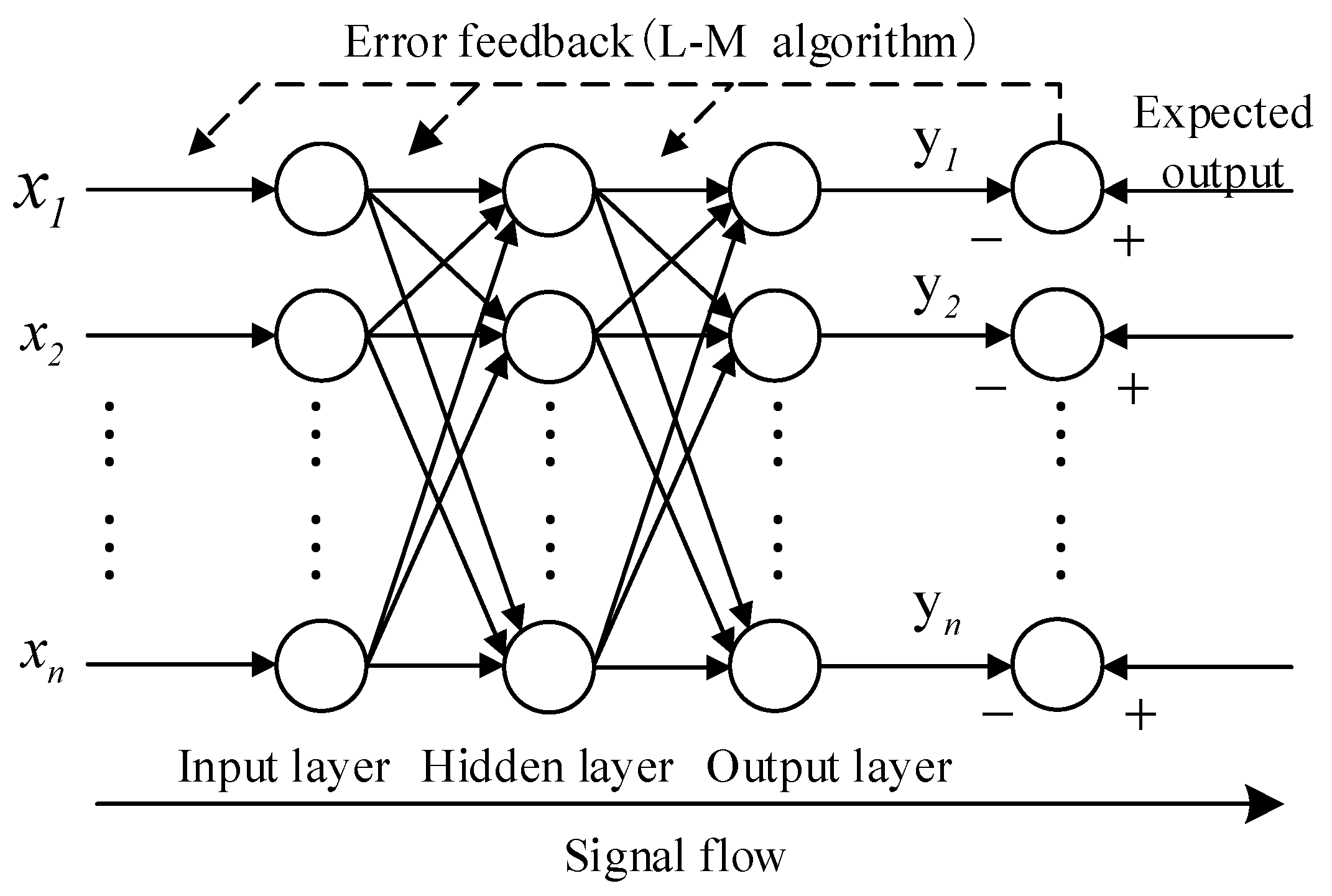
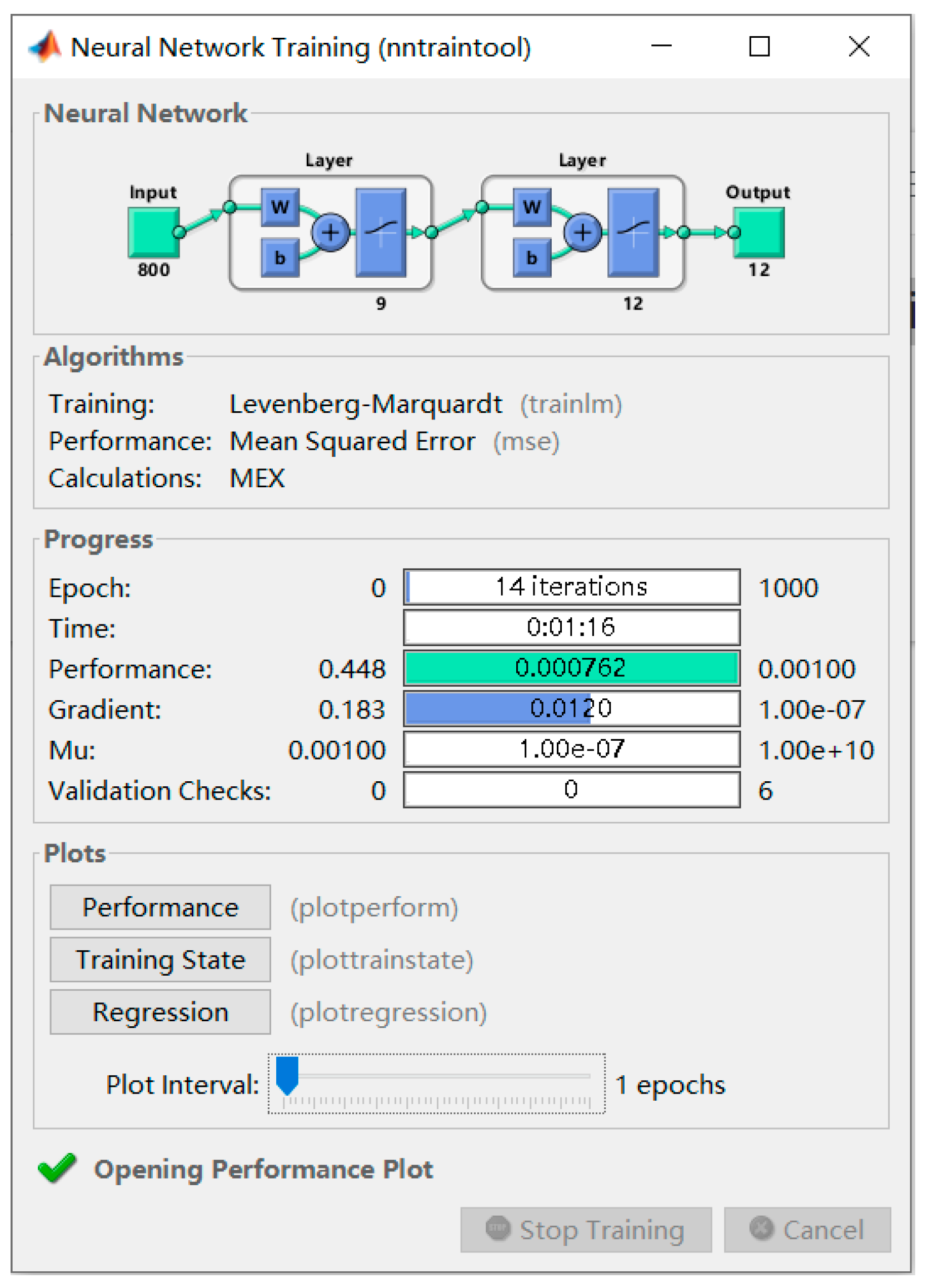
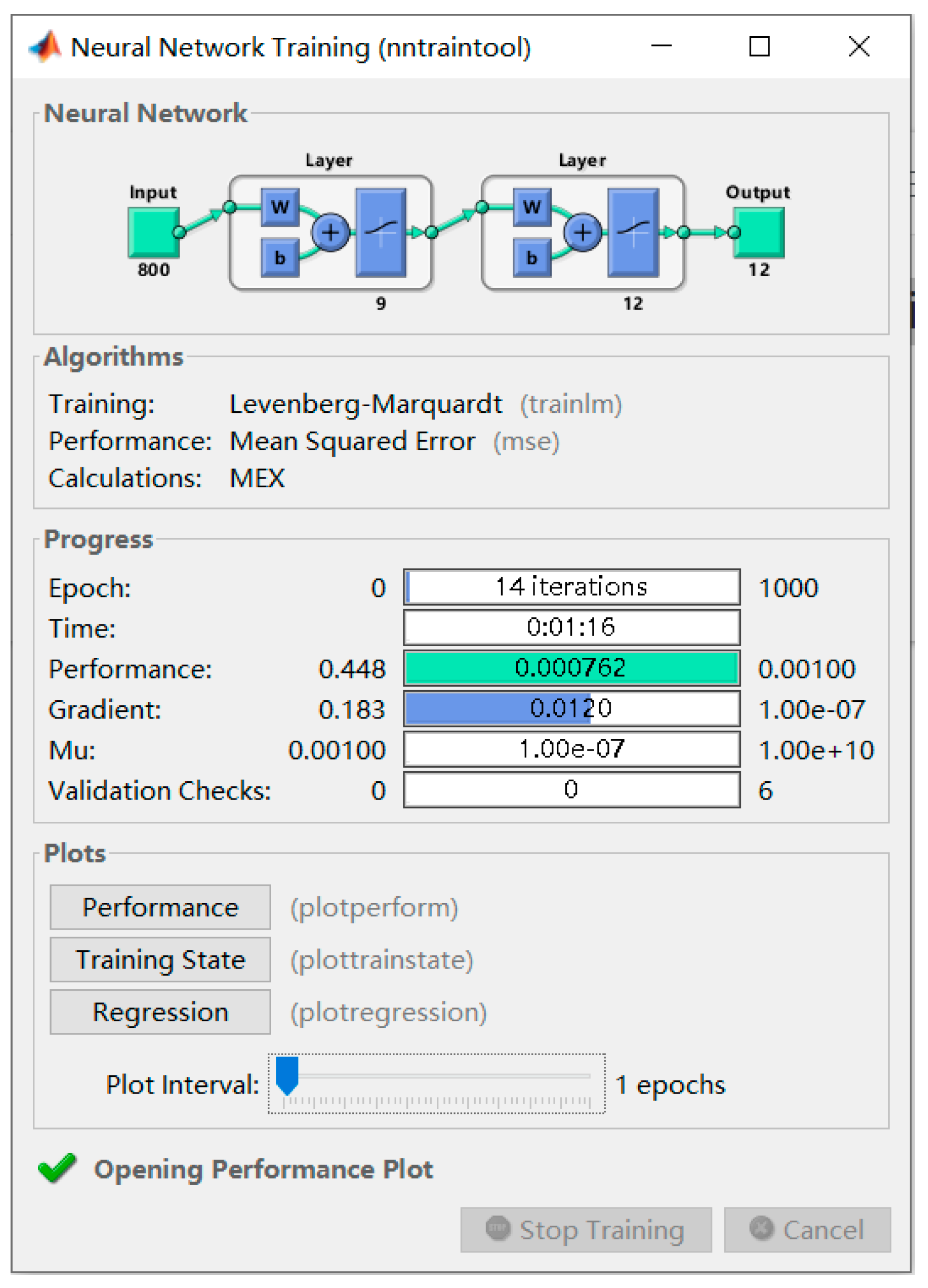
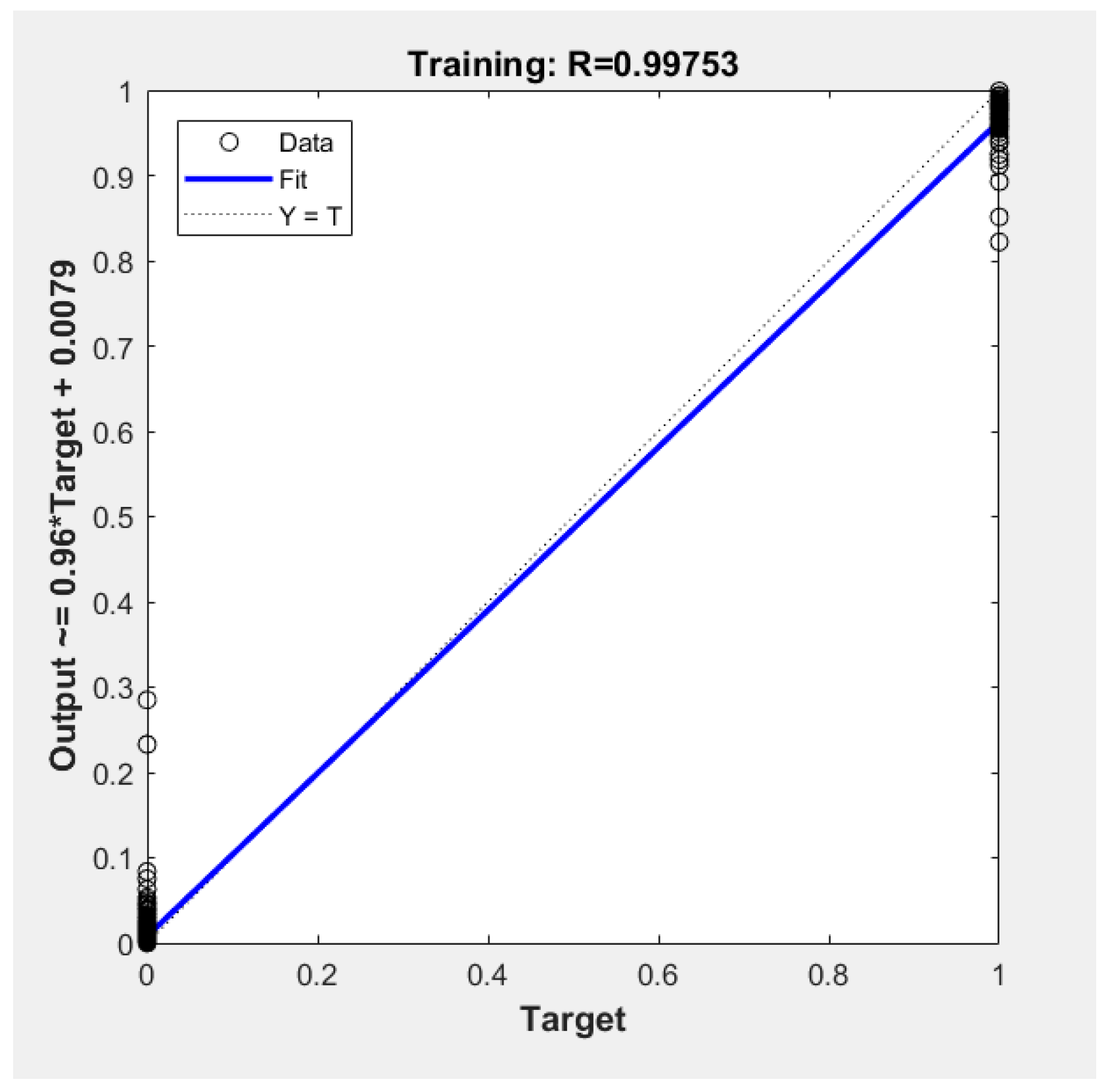
4.2. Principle and Algorithm of BP Neural Network
5. Simulation Analysis
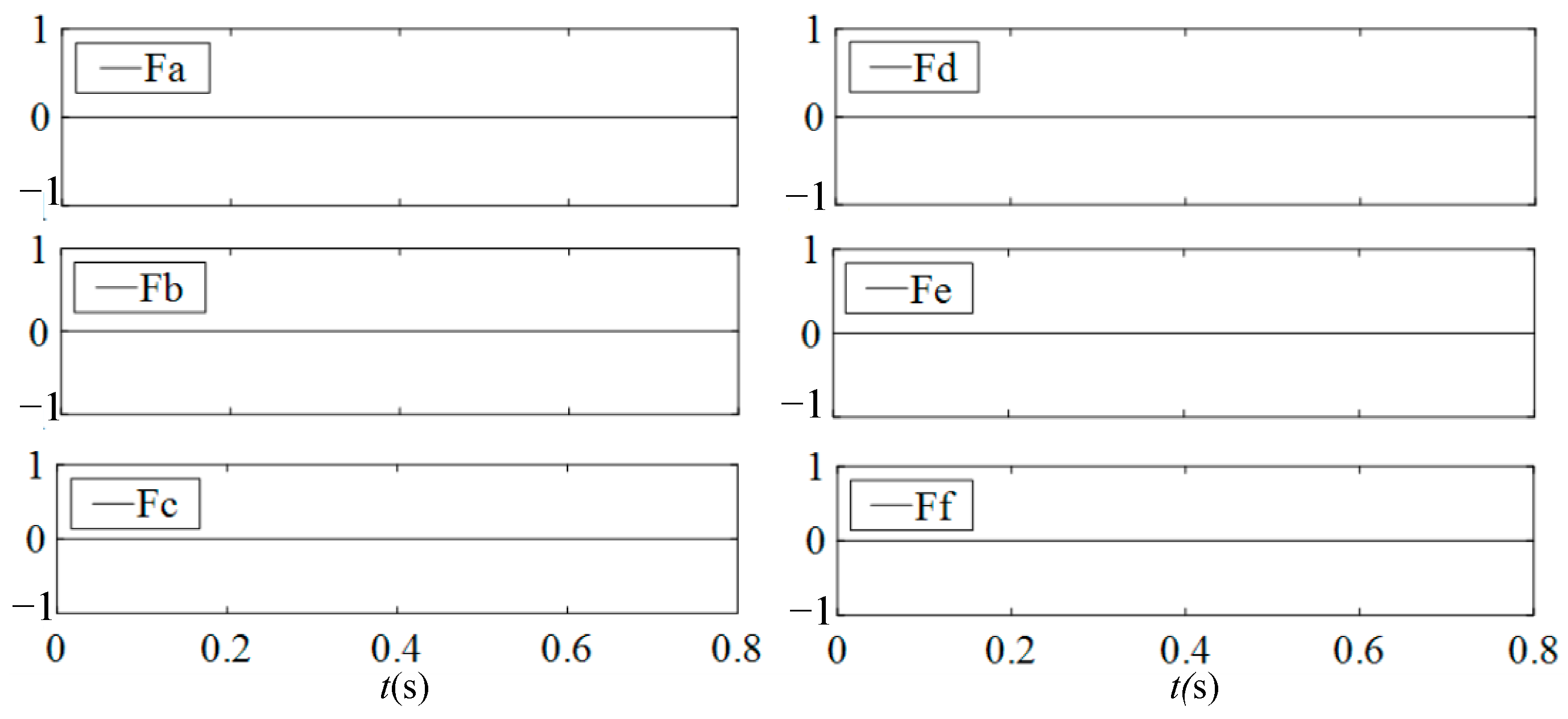
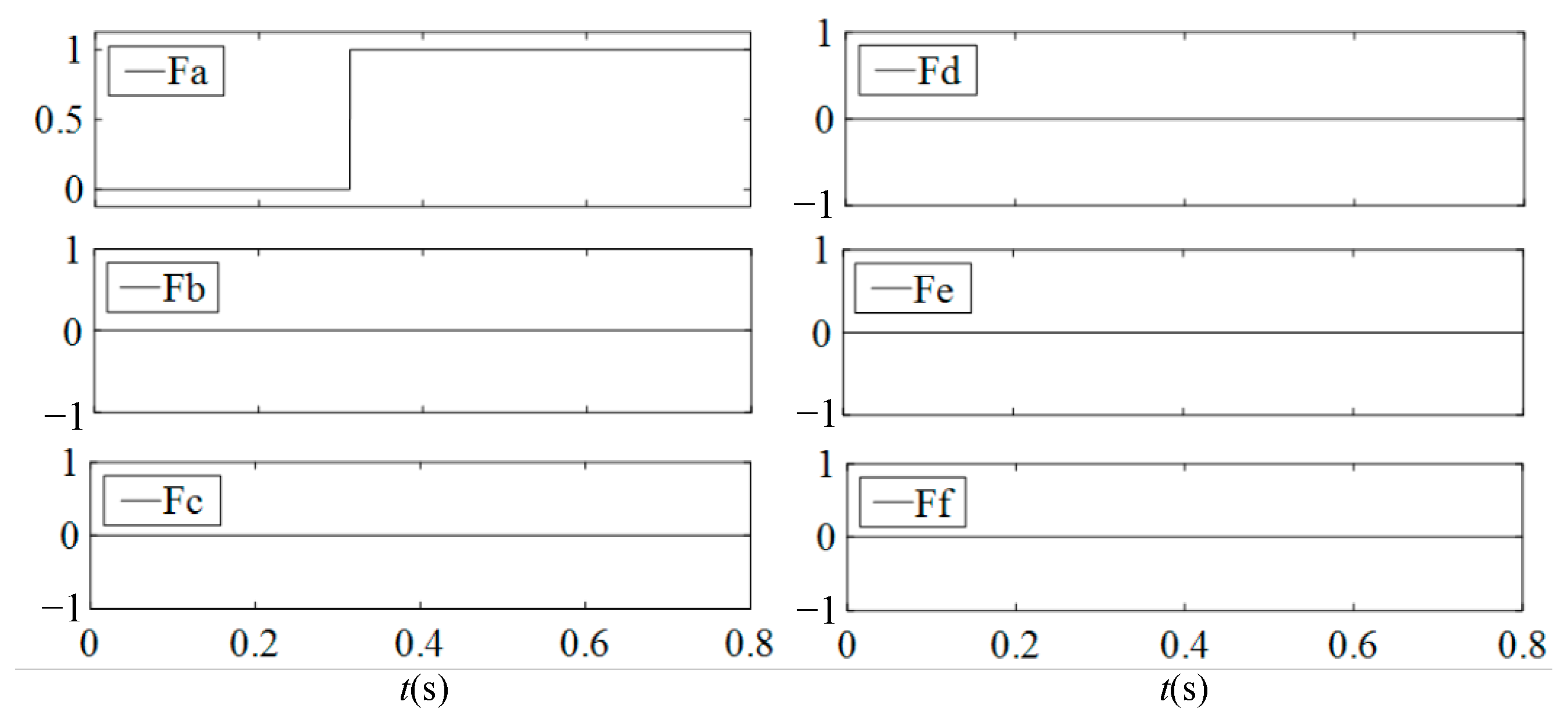
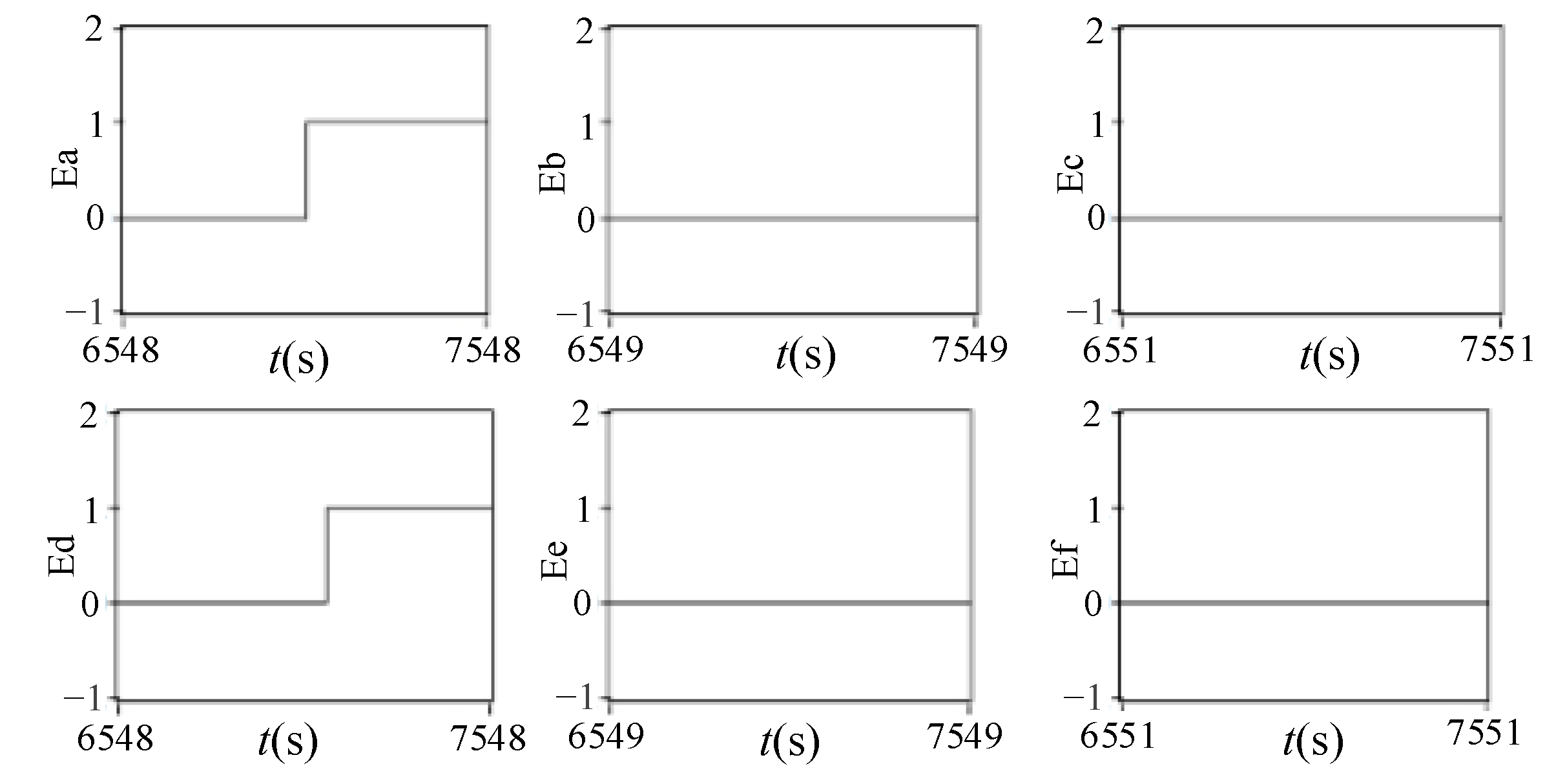
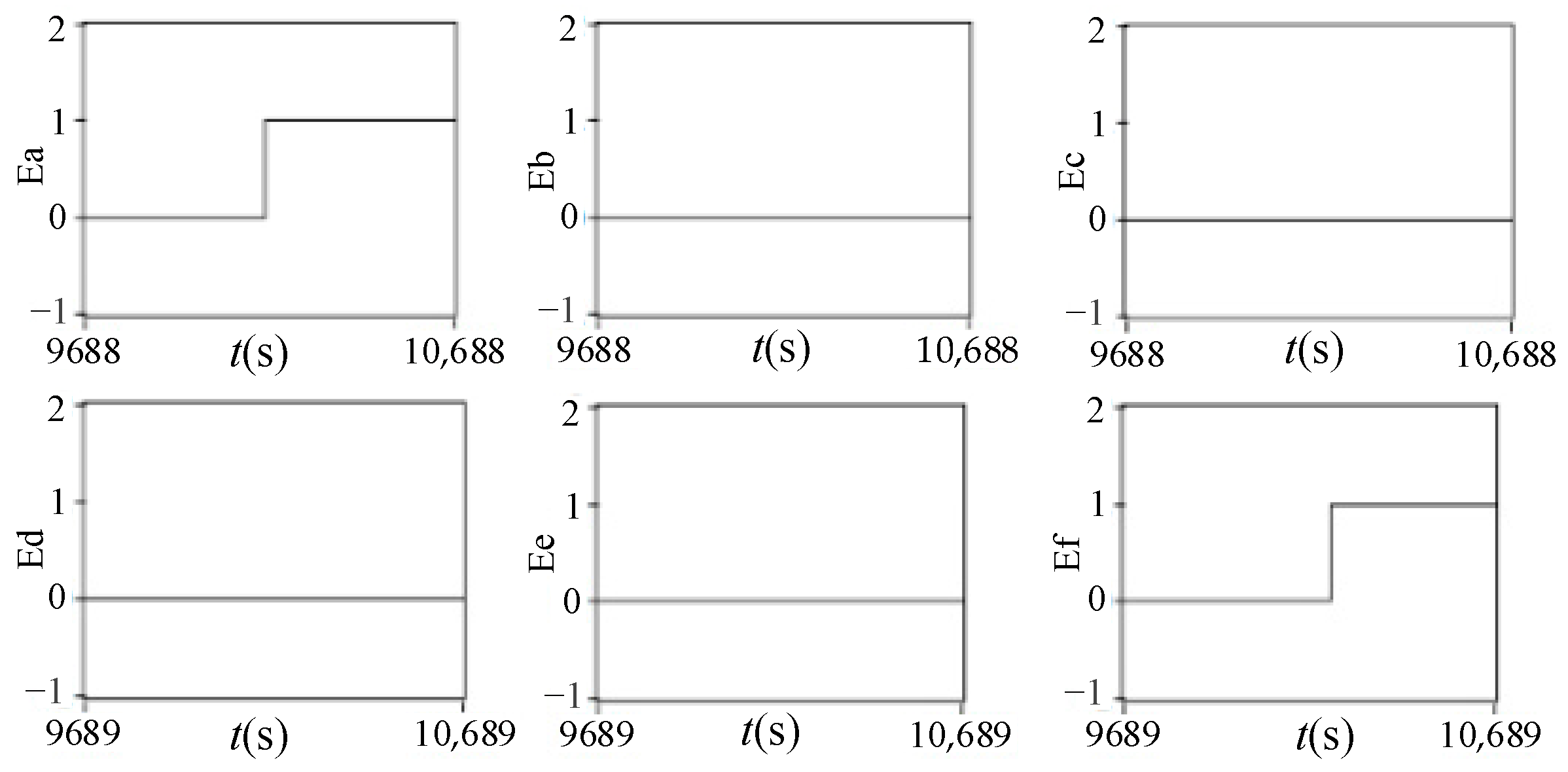
5.1. Simulation Analysis of Winding Open-Circuit Fault
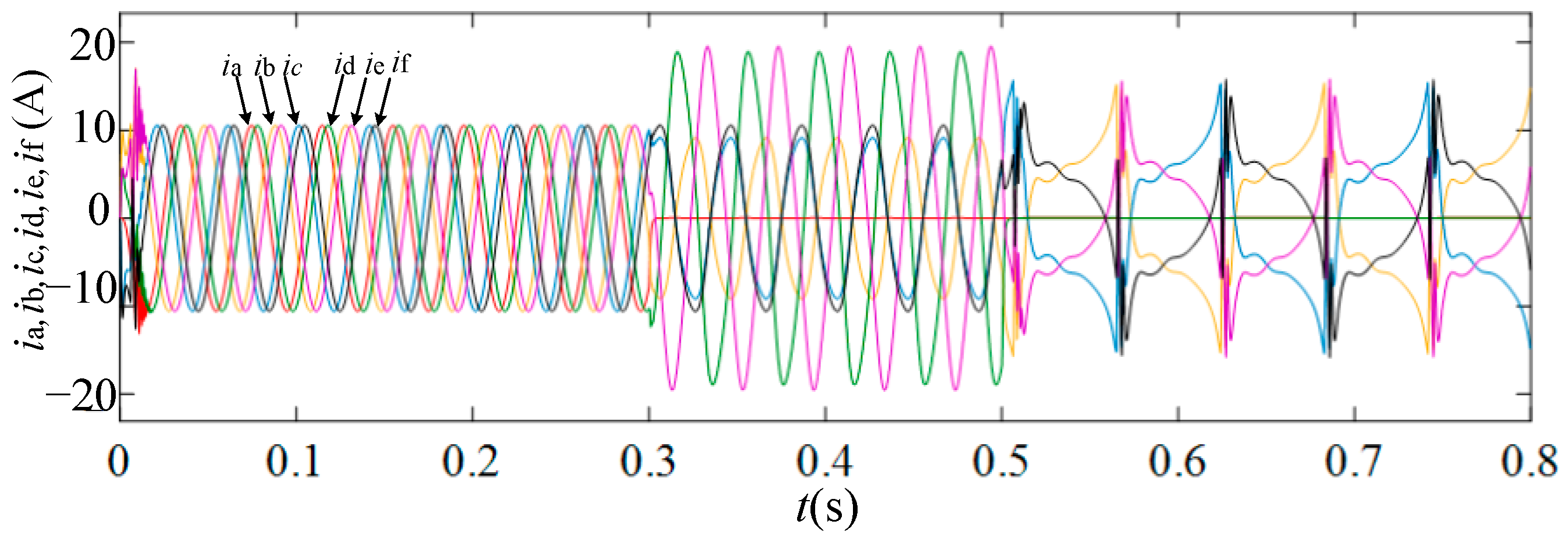
5.2. Switch Fault Simulation
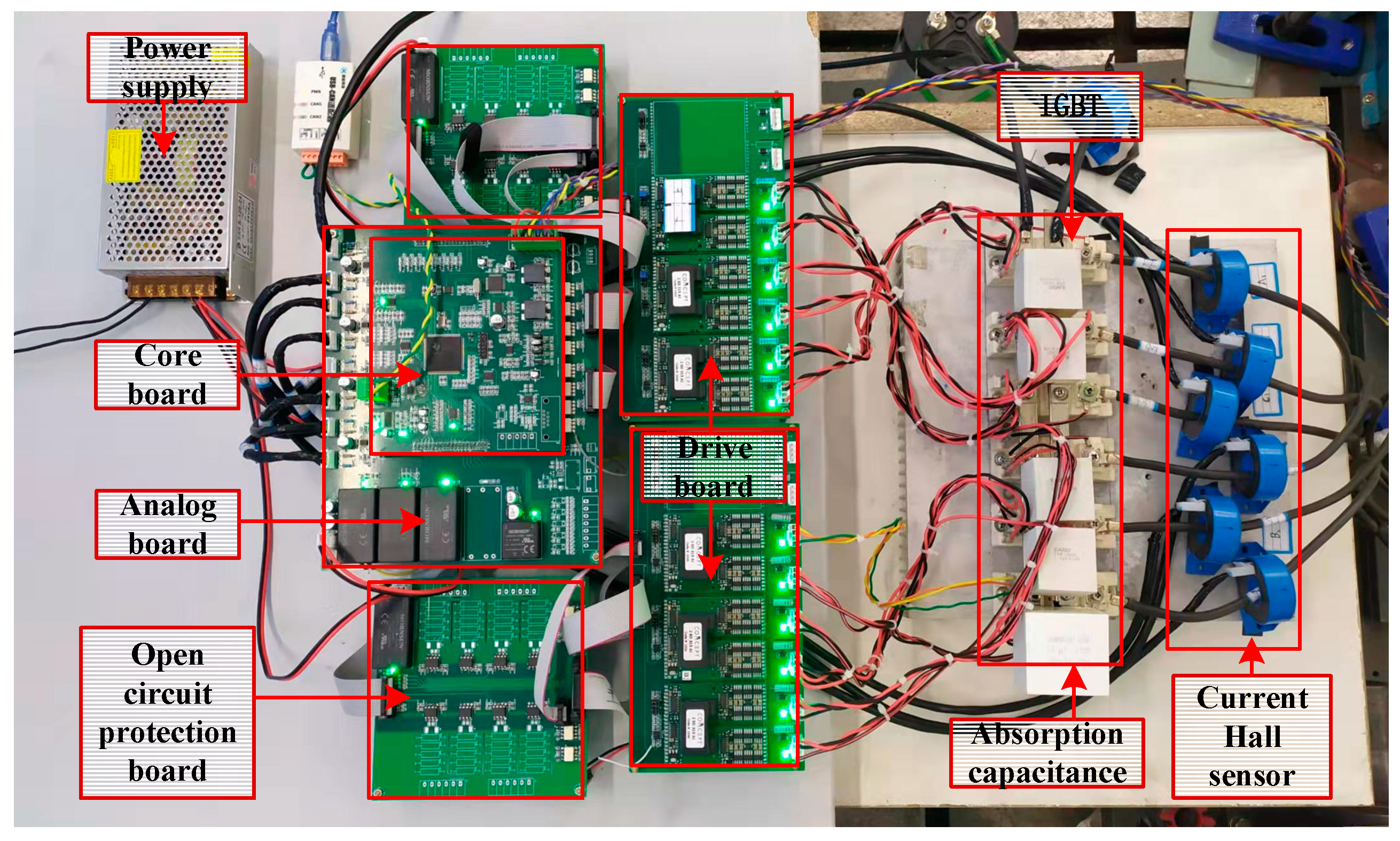
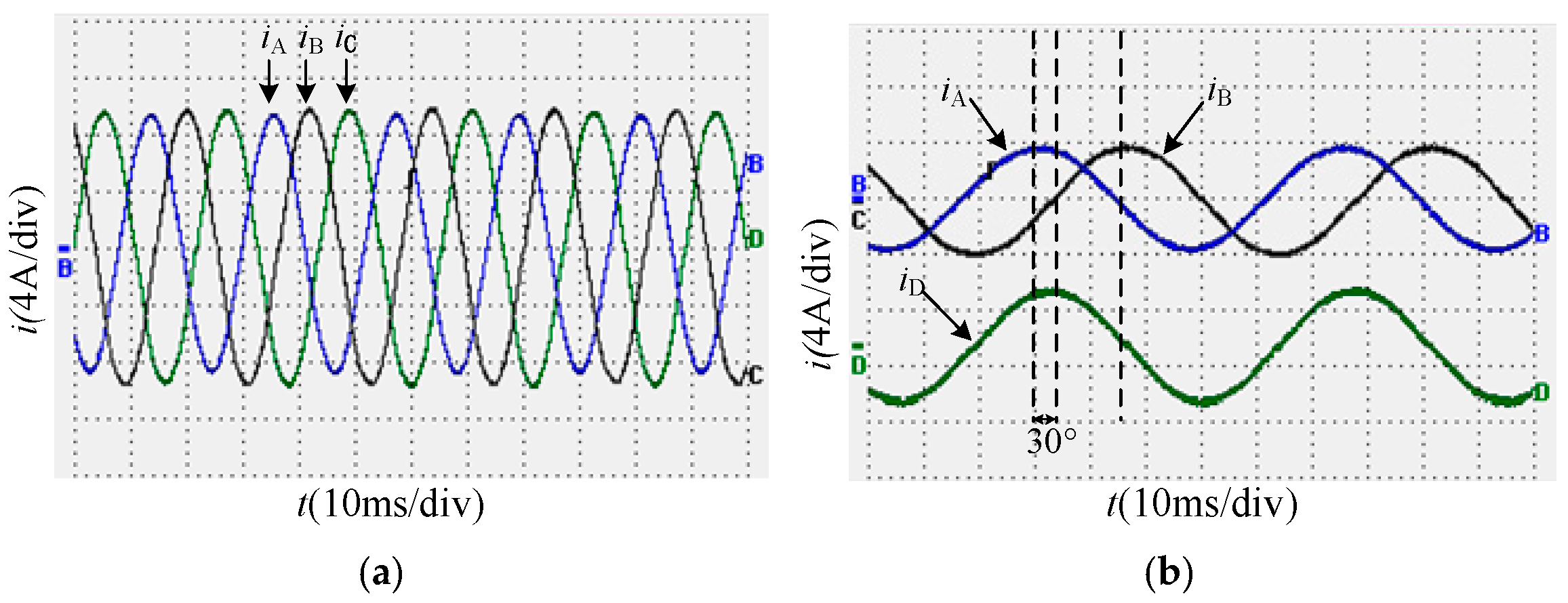
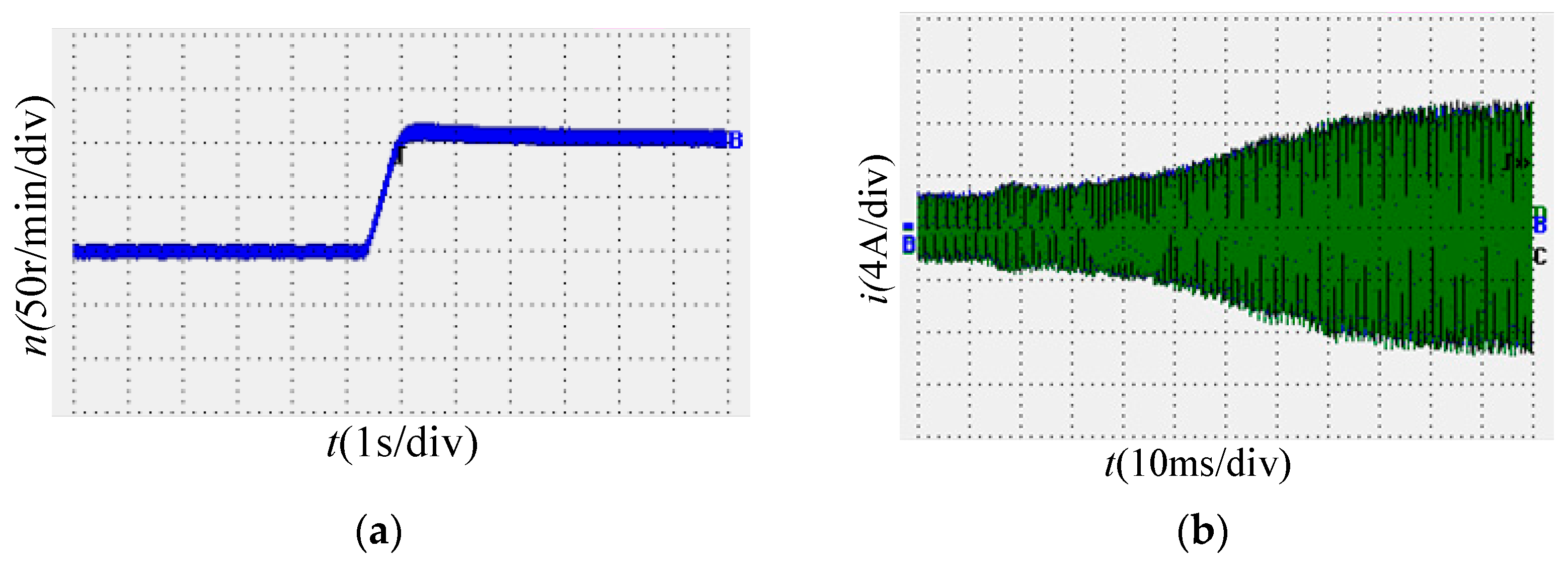
6. Experimental Verification
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Boglietti, A.; Cavagnino, A.; Tenconi, A.; Vaschetto, S. The Safety Critical Electric Machines and Drives in the more Electric Aircraft: A survey. In Proceedings of the 2009 35th Annual Conference of IEEE Industrial Electronics, Porto, Portugal, 3–5 November 2009; pp. 2587–2594. [Google Scholar]
- Ma, W.M.; Wang, D.; Cheng, S.W.; Chen, J.Q. Common basic scientific problems and technological development frontier of high performance motor system. Chin. J. Electr. Eng. 2016, 36, 2025–2035. [Google Scholar]
- Yan, M.; Ma, W.M.; Ou, Y.B.; Mang, M.Z.; Lu, L. Study on performance of dual nine phase energy storage motor system. Chin. J. Electr. Eng. 2015, 35, 6. [Google Scholar]
- Jeong, Y.S.; Sul, S.K.; Schulz, S.E.; Patel, N.R. Fault Detection and Dault Tolerant Control of Interior Permanent Magnet Motor Drive System for Electric Vehicle. IEEE Trans. Ind. Appl. 2003, 41, 1458–1463. [Google Scholar]
- IEEE Committee Report. Report of Large Motor Reliability Survey of Industrial and Commercial Installations. IEEE Trans. Ind. Appl. 1985, 23, 153–158. [Google Scholar]
- Gao, H.W.; Su, J.Y.; Yang, G.J. Open circuit fault diagnosis method of five phase inverter based on pole voltage error standardization. Chin. J. Electr. Eng. 2016, 36, 10. [Google Scholar]
- Zhang, Z.; Luo, G.A. Hybrid Diagnosis Method for Inverter Open-Circuit Faults in PMSM Drives. China Electrotech. Soc. Trans. Electr. Mach. Syst. 2020, 4, 180–189. [Google Scholar] [CrossRef]
- Diallo, D.; Benbouzid, M.E.H.; Hamad, D.; Pierre, X. Fault Detection and Diagnosis in an Induction Machine Drive: A Pattern Recognition Approach Based on Concordia Stator Mean Current Vector. IEEE Trans. Energy Convers. 2005, 20, 512–519. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.L.; Wu, Z.G.; Li, H. Open circuit fault diagnosis method of inverter based on DC side current detection. Chin. J. Electr. Eng. 2008, 28, 18–22. [Google Scholar]
- Dabour, S.M.; Rashad, E.; Hammad, R. Open-Circuit Fault Detection of Asymmetrical Six-phase Induction Motor Fed from Z-Source Inverter. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019; pp. 1216–1222. [Google Scholar]
- Zhang, Z.; Qi, S.; Liu, X. A Diagnosis Method for Open Circuit Fault of Dual Three-Phase Permanent Magnet Synchronous Motor Drive System. In Proceedings of the 2018 21st International Conference on Electrical Machines and Systems (ICEMS), Jeju, Korea, 7–10 October 2018; pp. 1425–1430. [Google Scholar]
- Yang, C.; Gui, W.; Chen, Z.; Zhang, J.; Peng, T.; Yang, C. Voltage Difference Residual-Based Open-Circuit Fault Diagnosis Approach for Three-Level Converters in Electric Traction Systems. IEEE Trans. Power Electron. 2019, 35, 3012–3028. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, J.J.; Chen, Z.Y. On line diagnosis of open circuit fault of three-phase inverter circuit based on current observer. J. Electrotech. 2019, 34, 609–617. [Google Scholar]
- Chen, C.B.; Wang, X.X.; Gao, S.; Zhang, Y.M. Open circuit fault diagnosis method of inverter based on interval sliding mode observer. Chin. J. Electr. Eng. 2020, 40, 4569–4579. [Google Scholar]
- Danjiang, C.; Yinzhong, Y. Open circuit fault diagnosis method of three-level inverter based on multi neural network. J. Electrotech. 2013, 28, 120–126. [Google Scholar]
- Cai, F.Y. Research on Fault Diagnosis and Fault Tolerant Operation of Underwater Permanent Magnet Synchronous Motor Driver; Harbin Institute of Technology: Harbin, China, 2016. [Google Scholar]
- Zhang, X.D.; Xu, B.J.; Wu, G.X.; Zuo, Y.B. Research on wind turbine fault diagnosis expert system. Manuf. Autom. 2014, 36, 21–25. [Google Scholar]
- Trabelsi, M.; Nguyen, N.K.; Semail, E. Real-Time Switches Fault Diagnosis Based on Typical Operating Characteristics of Five-Phase Permanent Magnetic Synchronous Machines. IEEE Trans. Ind. Electron. 2016, 63, 4683–4694. [Google Scholar] [CrossRef] [Green Version]
- Zhou, C.Y.; Shen, Y.X. Open circuit fault diagnosis of double three-phase voltage source inverter based on wavelet analysis. J. Mot. Control. 2020, 24, 65–75. [Google Scholar]
- Chen, Y.; Liu, Z.L.; Chen, Z.Y. Fast diagnosis and location method of inverter open circuit fault based on current vector feature analysis. J. Electrotech. 2018, 33, 883–891. [Google Scholar]
- Cui, J.; Wang, Q.; Gong, C.Y. Research on inverter power tube fault diagnosis technology combined with wavelet and Concordia transform. Chin. J. Electr. Eng. 2015, 35, 3110–3116. [Google Scholar]
- Hu, Y.; Li, Y.; Ma, X.; Li, X.; Huang, S. Flux-Weakening Control of Dual Three-Phase PMSM Based on Vector Space Decomposition Control. IEEE Trans. Power Electron. 2021, 36, 8428–8438. [Google Scholar] [CrossRef]
- Xie, R.; Wang, X.M.; Li, Y.; Zhao, K.R. Research and application on improved BP neural network algorithm. In Proceedings of the 2010 5th IEEE Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 June 2010; pp. 1462–1466. [Google Scholar]
- Cheng, H.; Cui, L.; Li, J. Application of improved BP neural network based on LM algorithm in desulfurization system of thermal power plant. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 5917–5920. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Switch | Fault Type | Fault Code | Fault Switch | Fault Type | Fault Code |
|---|---|---|---|---|---|
| Nothing | Normal | 000000000000 | |||
| T1 | Single-switch fault of the first set of winding | 100000000000 | T4 | Single-switch fault of the second set of winding | 000100000000 |
| T2 | 010000000000 | T5 | 000010000000 | ||
| T3 | 001000000000 | T6 | 000001000000 | ||
| T7 | 000000100000 | T10 | 000000000100 | ||
| T8 | 000000010000 | T11 | 000000000010 | ||
| T9 | 000000001000 | T12 | 000000000001 | ||
| T1T2 | Failure of two switches of the first set of winding | 110000000000 | T4T5 | Failure of two switches of the second set of winding | 000110000000 |
| T1T3 | 101000000000 | T4T6 | 000101000000 | ||
| T1T8 | 100000010000 | T4T11 | 000100000010 | ||
| T1T9 | 100000001000 | T4T12 | 000100000001 | ||
| T2T3 | 011000000000 | T5T6 | 000011000000 | ||
| T2T7 | 010000100000 | T5T10 | 000010000100 | ||
| T2T9 | 010000001000 | T5T12 | 000010000001 | ||
| T3T7 | 001000100000 | T6T10 | 000001000100 | ||
| T3T8 | 001000010000 | T6T11 | 000001000010 | ||
| T7T8 | 000000110000 | T10T11 | 000000000110 | ||
| T7T9 | 000000101000 | T10T12 | 000000000101 | ||
| T8T9 | 000000011000 | T11T12 | 000000000011 |
| Serial Number | Actual Output | Ideal Output | Fault Type |
|---|---|---|---|
| 1 | 0.9574 0.0003 0.0923 0.0119 0.0492 0.0087 0.0029 0.0565 0.0984 0.0278 0.0106 0.0012 | 100000000000 | T1 |
| 2 | 0.0094 0.9869 0.0147 0.0131 0.0106 0.0236 0.0293 0.0001 0.0882 0.0017 0.0453 0.0031 | 010000000000 | T2 |
| 3 | 0.0895 0.0282 0.9365 0.0013 0.0003 0.0002 0.0718 0.1507 0.0004 0.0077 0.0002 0.0221 | 001000000000 | T3 |
| 4 | 0.0016 0.0000 0.0071 0.9399 0.0615 0.0297 0.0001 0.0578 0.0000 0.0313 0.0001 0.0373 | 000100000000 | T4 |
| 5 | 0.0002 0.0181 0.0001 0.0198 0.9987 0.0001 0.0003 0.0001 0.0000 0.0001 0.2961 0.0052 | 000010000000 | T5 |
| 6 | 0.0068 0.0009 0.0001 0.0384 0.0000 0.9631 0.0064 0.0002 0.0103 0.0000 0.0200 0.0000 | 000001000000 | T6 |
| 7 | 0.0010 0.0060 0.0217 0.0580 0.1198 0.0036 0.9840 0.0385 0.0447 0.0691 0.0316 0.0005 | 000000100000 | T7 |
| 8 | 0.1813 0.0000 0.0052 0.0019 0.0398 0.0241 0.0077 0.9211 0.0005 0.0055 0.0000 0.0904 | 000000010000 | T8 |
| 9 | 0.0049 0.0096 0.0003 0.0111 0.0893 0.0558 0.0040 0.0764 0.9695 0.1351 0.0002 0.0058 | 000000001000 | T9 |
| 10 | 0.0156 0.0001 0.0099 0.0003 0.085 0.0324 0.0000 0.0054 0.0009 0.9973 0.0001 0.0237 | 000000000100 | T10 |
| 11 | 0.0000 0.0019 0.0021 0.0021 0.0055 0.0009 0.0001 0.0000 0.0014 0.6796 0.9954 0.0058 | 000000000010 | T11 |
| 12 | 0.0137 0.0000 0.0233 0.0171 0.0014 0.0001 0.0244 0.0005 0.0000 0.0001 0.0227 0.9101 | 000000000001 | T12 |
| 13 | 0.9455 0.9961 0.0199 0.0014 0.0007 0.0059 0.0699 0.0720 0.0533 0.0006 0.0000 0.0012 | 110000000000 | T1T2 |
| 14 | 0.9635 0.0585 0.9787 0.0003 0.0013 0.0002 0.1210 0.0322 0.0418 0.1409 0.0006 0.0002 | 101000000000 | T1T3 |
| 15 | 0.9465 0.0002 0.0262 0.0004 0.0414 0.0618 0.0002 0.9202 0.0022 0.0302 0.0000 0.0214 | 100000010000 | T1T8 |
| 16 | 0.9799 0.1623 0.0730 0.0002 0.0022 0.0116 0.0092 0.0692 0.9608 0.1598 0.0000 0.0007 | 100000001000 | T1T9 |
| 17 | 0.0247 0.9807 0.9339 0.0015 0.0016 0.0001 0.0754 0.0216 0.0840 0.0010 0.0391 0.0007 | 011000000000 | T2T3 |
| 18 | 0.0001 0.9602 0.0222 0.0063 0.0264 0.0007 0.9491 0.0050 0.0870 0.0007 0.0175 0.0411 | 010000100000 | T2T7 |
| 19 | 0.0004 0.9792 0.0095 0.0001 0.0016 0.0549 0.0009 0.0012 0.9561 0.0095 0.0141 0.0937 | 010000001000 | T2T9 |
| 20 | 0.0479 0.0051 0.9673 0.0080 0.0000 0.0008 0.9701 0.0603 0.0000 0.0512 0.0000 0.0003 | 001000100000 | T3T7 |
| 21 | 0.0076 0.0000 0.9344 0.0029 0.0003 0.0068 0.0003 0.9902 0.0001 0.0724 0.0958 0.0069 | 001000010000 | T3T8 |
| 22 | 0.0000 0.0000 0.0195 0.9876 0.8665 0.0032 0.0001 0.0001 0.0000 0.0051 0.0507 0.0106 | 000110000000 | T4T5 |
| 23 | 0.0002 0.0186 0.0001 0.9968 0.0311 0.9535 0.0064 0.0002 0.0000 0.0000 0.0366 0.0000 | 000101000000 | T4T6 |
| 24 | 0.0000 0.0092 0.0005 0.9422 0.0242 0.0008 0.0000 0.0008 0.0000 0.0036 0.9658 0.0414 | 000100000010 | T4T11 |
| 25 | 0.0000 0.0000 0.0051 0.9606 0.0115 0.0004 0.0428 0.0034 0.0000 0.0009 0.0274 0.9119 | 000100000001 | T4T12 |
| 26 | 0.0002 0.0494 0.0000 0. 0011 0.8858 0.9982 0.0017 0.0001 0.0032 0.0001 0.0969 0.0000 | 000011000000 | T5T6 |
| 27 | 0.1324 0.0013 0.0000 0.0000 0.9892 0.0006 0.0000 0.0357 0.0004 0.8010 0.0008 0.0048 | 000010000100 | T5T10 |
| 28 | 0.0001 0.0001 0.0122 0.1004 0.9647 0.0000 0.0021 0.0003 0.0000 0.0363 0.0163 0.7030 | 000010000001 | T5T12 |
| 29 | 0.0315 0.0002 0.0368 0.0010 0.0001 0.9669 0.0163 0.0004 0.0328 0.8387 0.0001 0.0033 | 000001000100 | T6T10 |
| 30 | 0.0000 0.0015 0.0001 0.1827 0.0001 0.6872 0.0673 0.0000 0.0026 0.0000 0.9825 0.0000 | 000001000010 | T6T11 |
| 31 | 0.0050 0.0000 0.1506 0.0274 0.0174 0.0003 0.9406 0.9372 0.0022 0.0685 0.0001 0.0021 | 000000110000 | T7T8 |
| 32 | 0.0724 0.0930 0.0004 0.0007 0.0014 0.0508 0.9778 0.1332 0.9280 0.0191 0.0000 0.0002 | 000000101000 | T7T9 |
| 33 | 0.0837 0.0270 0.0092 0.0007 0.0446 0.0027 0.0275 0.9727 0.9892 0.1027 0.0000 0.0011 | 000000011000 | T8T9 |
| 34 | 0.0000 0.0000 0.0401 0.0074 0.0001 0.0153 0.0005 0.0002 0.0005 0.9980 0.6568 0.1243 | 000000000110 | T10T11 |
| 35 | 0.0002 0.0001 0.0033 0.1092 0.1596 0.0033 0.0033 0.0407 0.0000 0.9995 0.0083 0.9203 | 000000000101 | T10T12 |
| 36 | 0.0008 0.0044 0.0451 0.0283 0.0005 0.0000 0.0014 0.0002 0.0000 0.0009 0.9609 0.9795 | 000000000011 | T11T12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, H.; Guo, J.; Hou, Z.; Zhang, B.; Dong, Y. Fault Diagnosis Method of Six-Phase Permanent Magnet Synchronous Motor Based on Vector Space Decoupling. Electronics 2022, 11, 1229. https://doi.org/10.3390/electronics11081229
Gao H, Guo J, Hou Z, Zhang B, Dong Y. Fault Diagnosis Method of Six-Phase Permanent Magnet Synchronous Motor Based on Vector Space Decoupling. Electronics. 2022; 11(8):1229. https://doi.org/10.3390/electronics11081229
Chicago/Turabian StyleGao, Hanying, Jie Guo, Zengquan Hou, Bangping Zhang, and Yao Dong. 2022. "Fault Diagnosis Method of Six-Phase Permanent Magnet Synchronous Motor Based on Vector Space Decoupling" Electronics 11, no. 8: 1229. https://doi.org/10.3390/electronics11081229
APA StyleGao, H., Guo, J., Hou, Z., Zhang, B., & Dong, Y. (2022). Fault Diagnosis Method of Six-Phase Permanent Magnet Synchronous Motor Based on Vector Space Decoupling. Electronics, 11(8), 1229. https://doi.org/10.3390/electronics11081229