
A Path-Planning Method for Wall Surface Inspection Robot Based on Improved Genetic Algorithm


Abstract
:1. Introduction
- A raster map of the environment construction method was present. The motion area according to the level of the premeasured GPS strength was divided. The spatial map containing GPS signal was established by introducing the GPS signal strength information into the raster map.
- Based on the environment condition and operating feature of the wall surface inspection robot, the GA was improved. The particle swarm optimization (PSO) algorithm was used to initialize the GA, aiming to avoid the local optimum and slow convergence caused by over-randomness in GA initialization. The fitness function was optimized by taking into account the changes in the GPS signal strength and path angle. Additionally, a new crossover and mutation probability update method was used to develop the performance of GA based on population fitness.
- Using the raster map, the simulation experiment was performed for comparison so as to validate the feasibility and effectiveness of the proposed method.
2. Related Work
3. Establishment of the Motion Space Map with GPS Signal
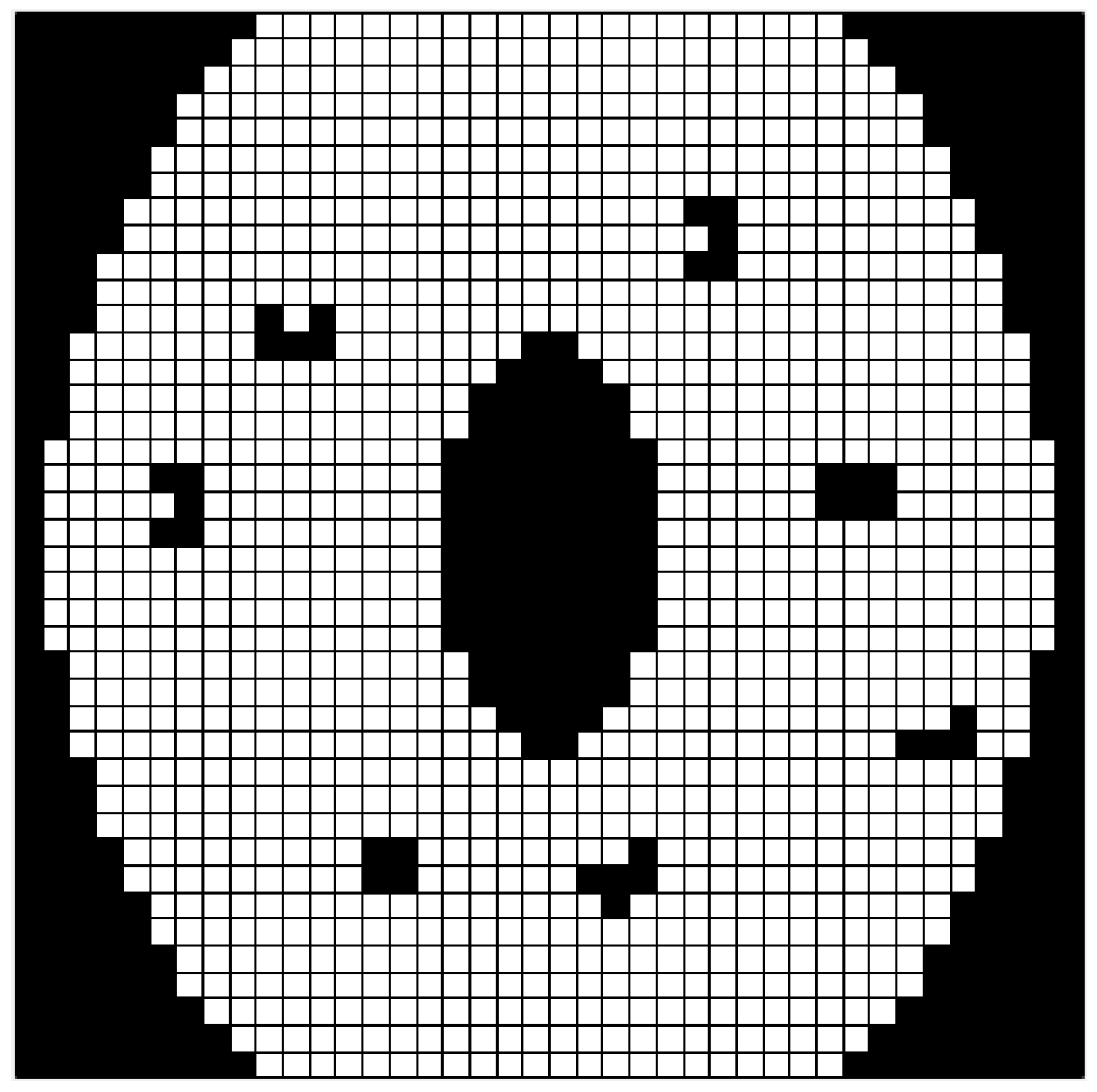
3.1. Establishment of Raster Map
3.2. GPS Signal Strength Map
3.3. Map of Motion Space
4. Improved Generic Algorithm
4.1. GA and PSO Algorithm
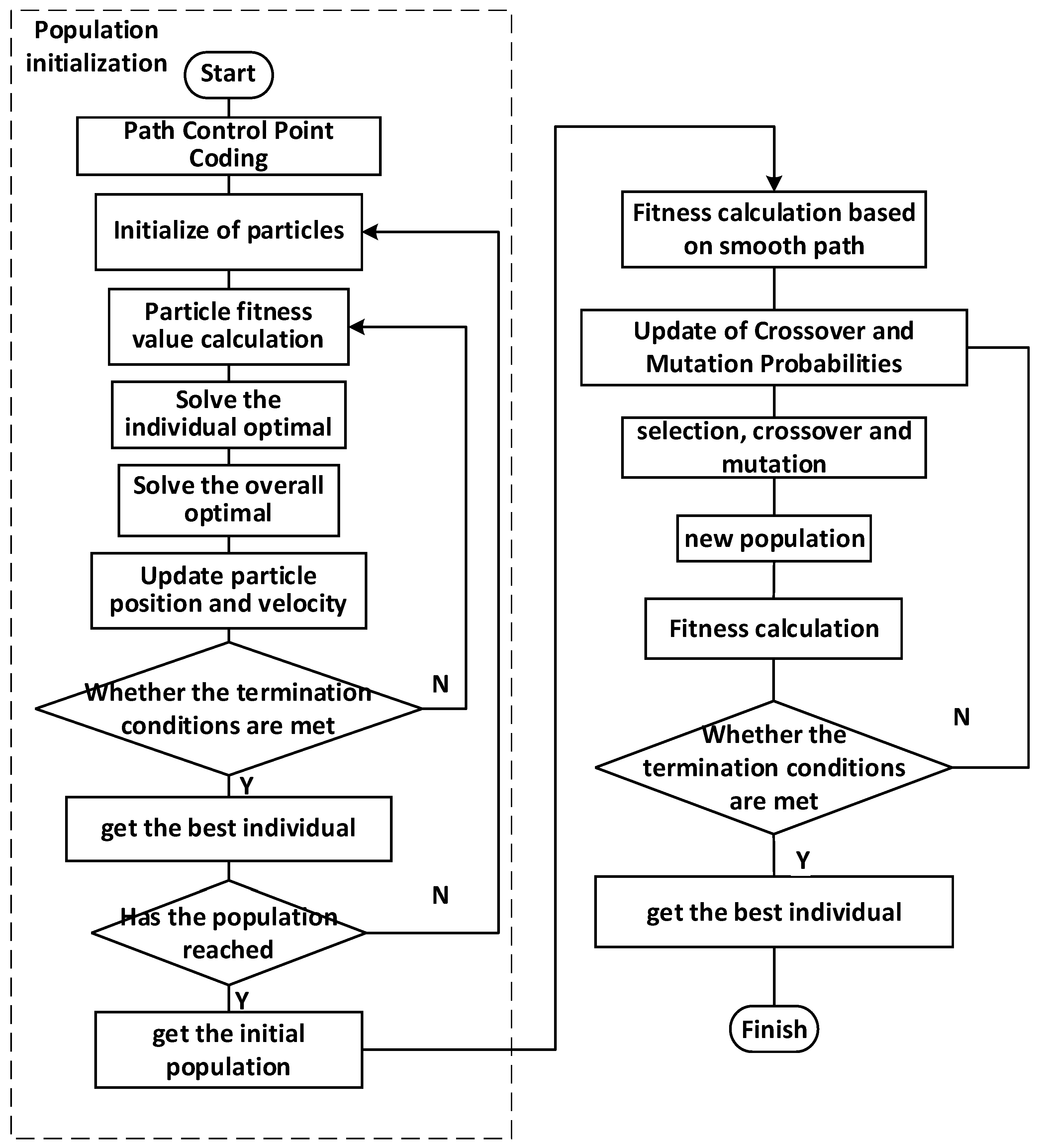
4.2. Robot Path-Planning Algorithm Based on the Combination of PSO Algorithm and GA
4.2.1. Algorithm Flow
4.2.2. Initialization Method
4.2.3. Fitness Function
4.2.4. Adaptive Crossover and Mutation Probability
5. Simulation Experiment
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rui, W. Structural Optimization Design of Special Robot for Large Generator Air Gap Inspection. Master’s Thesis, Huazhong University of Science & Technology, Wuhan, China, 2020. [Google Scholar]
- Tao, Y.; Gao, H.; Ren, F.; Chen, C.; Jiang, S. A Mobile Service Robot Global Path Planning Method Based on Ant Colony Optimization and Fuzzy Control. Appl. Sci. 2021, 11, 3605. [Google Scholar] [CrossRef]
- Bisht, R.S.; Pathak, P.M.; Panigrahi, S.K.M. Design and development of a glass façade cleaning robot. J. Mech. Mach. Theory 2022, 168, 104585. [Google Scholar] [CrossRef]
- Dos Santos, C.H.F.; Abdali, M.H.; Martins, D.; Aníbal Alexandre, C.B. Geometrical motion planning for cable-climbing robots applied to distribution power lines inspection. Int. J. Syst. Sci. 2021, 52, 1646–1663. [Google Scholar] [CrossRef]
- Mrudul, K.; Mandava, R.K.; Vundavilli, P.R. An efficient path planning algorithm for biped robot using fast marching method. Procedia Comput. Sci. 2018, 133, 116–123. [Google Scholar] [CrossRef]
- Wanting, R. Research on Key Technology of Hull Cleaning Robot Based on High Pressure Water Jet. Master’s Thesis, Harbin Engineering University, Harbin, China, 2017. [Google Scholar]
- Lefebvre, N.; Schjølberg, I.; Utne, I.B. Integration of risk in hierarchical path planning of underwater vehicles. IFAC Pap. 2016, 49, 226–231. [Google Scholar] [CrossRef]
- Chaari, I.; Koubaa, A.; Bennaceur, H.; Ammar, A.; Alajlan, M.; Youssef, H. Design and performance analysis of global path planning techniques for autonomous mobile robots in grid environments. Int. J. Adv. Robot. Syst. 2017, 14. [Google Scholar] [CrossRef]
- Liu, C.; Mao, Q.; Chu, X.; Xie, S. An Improved A-Star Algorithm Considering Water Current, Traffic Separation and Berthing for Vessel Path Planning. Appl. Sci. 2019, 9, 1057. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ming, Y.; Zhang, Z.; Yan, W.; Wang, K. An adaptive ant colony algorithm for autonomous vehicles global path planning. In Proceedings of the 2021 IEEE 24th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Dalian, China, 5–7 May 2021; pp. 1117–1122. [Google Scholar]
- Meier, D.; Tullumi, I.; Stauffer, Y.; Dornberger, R.; Hanne, T. A novel backup path planning approach with ACO. In Proceedings of the 2017 5th International Symposium on Computational and Business Intelligence (ISCBI), Dubai, United Arab Emirates, 11–14 August 2017. [Google Scholar]
- Rashid, R.; Perumal, N.; Elamvazuthi, I.; Tageldeen, M.K.; Parasuraman, S. Mobile robot path planning using Ant Colony Optimization. In Proceedings of the 2016 2nd IEEE International Symposium on Robotics and Manufacturing Automation (ROMA), Ipoh, Malaysia, 25–27 September 2017. [Google Scholar]
- Zhou, X.; Gao, F.; Fang, X.; Lan, Z. Improved bat algorithm for UAV path planning in three-dimensional space. IEEE Access 2021, 9, 20100–20116. [Google Scholar] [CrossRef]
- Yuming, L.; Lihong, X. Global Path Planning of Mobile Robot Based on Improved Simulated Annealing Hybrid Algorithm. Control Decis. Mak. 2010, 25, 237–240+245. [Google Scholar]
- Nayyar, A.; Nguyen, N.G.; Kumari, R.; Kumar, S. Robot Path Planning Using Modified Artificial Bee Colony Algorithm. In Frontiers in Intelligent Computing: Theory and Applications; Springer: Singapore, 2020. [Google Scholar]
- Spanogianopoulos, S.; Sirlantzis, K. Non-holonomic path planning of car-like robot using RRT*FN. In Proceedings of the International Conference on Ubiquitous Robots & Ambient Intelligence, Goyangi, Korea, 28–30 October 2015. [Google Scholar]
- Devaurs, D.; Siméon, T.; Cortés, J. Optimal Path Planning in Complex Cost Spaces With Sampling-Based Algorithms. IEEE Trans. Autom. Sci. Eng. 2016, 13, 415–424. [Google Scholar] [CrossRef] [Green Version]
- Mthabela, C.; Withey, D.; Kuchwa-Dube, C. RRT based path planning for mobile robots on a 3D surface mesh. In Proceedings of the 2021 Southern African Universities Power Engineering Conference/Robotics and Mechatronics/Pattern Recognition Association of South Africa (SAUPEC/RobMech/PRASA), Potchefstroom, South Africa, 27–29 January 2021. [Google Scholar]
- Nayyar, A.; Garg, S.; Gupta, D.; Khanna, A. Evolutionary computation: Theory and algorithms. In Advances in Swarm Intelligence for Optimizing Problems in Computer Science; Chapman and Hall/CRC: London, UK, 2018; pp. 1–26. [Google Scholar]
- Nayyar, A.; Nguyen, N.G. Introduction to swarm intelligence. In Advances in Swarm Intelligence for Optimizing Problems in Computer Science; Chapman and Hall/CRC: London, UK, 2018; pp. 53–78. [Google Scholar]
- Abdullah, J.M.; Rashid, T.A. Fitness Dependent Optimizer: Inspired by the Bee Swarming Reproductive Process. IEEE Access 2019, 7, 43473–43486. [Google Scholar] [CrossRef]
- Shamsaldin, A.S.; Rashid, T.A.; Al-Rashid, A.; Al-Salihi, N.K.; Mokhtar, M. Donkey and Smuggler Optimization Algorithm: A Collaborative Working Approach to Path Finding. J. Comput. Des. Eng. 2019, 6, 4. [Google Scholar] [CrossRef]
- Rahman, C.M.; Rashid, T.A. A new evolutionary algorithm: Learner performance based behavior algorithm. Egypt. Inform. J. 2020, 22, 213–223. [Google Scholar] [CrossRef]
- Durgam, R.; Devarakonda, N.; Nayyar, A.; Eluri, R. Improved Genetic Algorithm Using Machine Learning Approaches to Feature Modelled for Microarray Gene Data. In Soft Computing for Security Applications; Springer: Berlin/Heidelberg, Germany, 2022; pp. 859–872. [Google Scholar]
- Hama Rashid, D.N.; Rashid, T.A.; Mirjalili, S. ANA: Ant Nesting Algorithm for Optimizing Real-World Problems. Mathematics 2021, 9, 3111. [Google Scholar] [CrossRef]
- Tuncer, A.; Yildirim, M. Dynamic path planning of mobile robots with improved genetic algorithm. Comput. Electr. Eng. 2012, 38, 1564–1572. [Google Scholar] [CrossRef]
- Zhang, T.W.; Xu, G.H.; Zhan, X.S.; Han, T. A new hybrid algorithm for path planning of mobile robot. J. Supercomput. 2021, 78, 4158–4181. [Google Scholar] [CrossRef]
- Wu, Y.; Wu, S.; Hu, X. Cooperative Path Planning of UAVs & UGVs for a Persistent Surveillance Task in Urban Environments. IEEE Internet Things J. 2020, 8, 4906–4919. [Google Scholar]
- Guojun, S. Study on Magnetic Leakage Detection and Path Planning of a Crawling Robot for Oil Storage Tank Wall. Ph.D. Thesis, Northeast Petroleum University, Daqing, China, 2018. [Google Scholar]
- Junhua, L. Path Planning of a Biped Wall-Climbing Robot in SPatial Environments. Master’s Thesis, Guangdong University of Technology, Guangzhou, China, 2019. [Google Scholar]
- Junhua, L.; Haifei, Z.; Jinglun, L.; Yisheng, G. Global path planning of 3D wall environment for biped wall-climbing robot. J. Harbin Inst. Technol. 2020, 52, 8. [Google Scholar]
- Zhu, H.; Lu, J.; Gu, S.; Wei, S.; Guan, Y. Planning 3D Collision-free Optimized Climbing Path for Biped Wall-climbing Robots. IEEE/ASME Trans. Mechatron. 2020, 26, 2712–2723. [Google Scholar] [CrossRef]
- Jun, L. Motor Control and Path Planning of Wall-Climbing Robots. Master’s Thesis, Northeastern University, Shenyang, China, 2010. [Google Scholar]
- Liu, J.; Xiao, J.; Sha, X.Z. The Research on Path Planning of Wall Climbing Robot Based on Ant Colony Algorithm and Minimum Gravity Consumption Algorithm. Appl. Mech. Mater. 2011, 44–47, 414–424. [Google Scholar] [CrossRef]
- Yue, R.; Wang, S. Path Planning of Wall Climbing Robot Based on Mixed Integer Linear Programming. J. Beijing Univ. Aeronaut. Astronaut. 2013, 39, 792–797. [Google Scholar]
- Zhu, P.; Wang, W.; Li, X.; Wu, S. Path planning of bionic wall-climbing robot based on GPL model. China Mech. Eng. 2016, 27, 6. [Google Scholar]
- Dang, F.L.; Wu, C.X.; Wu, Y.; Li, R.; Zhang, S.; Huang, J.; Liu, Z.G. Cost-based multi-parameter logistics routing path optimization algorithm. Math. Biosci. Eng. 2019, 16, 6975–6989. [Google Scholar] [CrossRef] [PubMed]
- Luo, H. Path Planning and Contact Force Compliance Control of Climbing Robot for Rotor Blade Inspection. Master’s Thesis, China Jiliang University, Hangzhou, China, 2014. [Google Scholar]
- Binrui, W.; Haohua, L.; Yinglian, J.; Weibo, F. Design and Simulation of Surface Path Planning and Simulation of Wind Turbine Blade for Wall Climbing Robot. J. Sol. Energy 2015, 36, 6. [Google Scholar]
- Beeson, P.; Modayil, J.; Kuipers, B. Factoring the Mapping Problem: Mobile Robot Map-building in the Hybrid Spatial Semantic Hierarchy. Int. J. Robot. Res. 2010, 29, 428–459. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic Algorithms and the Optimal Allocation of Trials. SIAM J. Comput. 1973, 2, 88–105. [Google Scholar] [CrossRef]
- Pereira, J.; Mendes, J.; Júnior, J.S.; Viegas, C.; Paulo, J.R. A Review of Genetic Algorithm Approaches for Wildfire Spread Prediction Calibration. Mathematics 2022, 10, 300. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle Swarm Optimization. In Proceedings of the Icnn95-International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995. [Google Scholar]
- Rastegar, S.; Araujo, R.; Mendes, J. Online identification of Takagi–Sugeno fuzzy models based on self-adaptive hierarchical particle swarm optimization algorithm. Appl. Math. Model. 2017, 45, 606–620. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Level | Signal Quality | Positioning and Navigation Effect |
|---|---|---|
| 0 | Fine | Capable of normal positioning and navigation, and the trajectory is basically free of deviation. |
| 1 | General | Capable of positioning and navigation, there is a small trajectory deviation. |
| 2 | Weak | Reluctant to perform positioning and navigation, the trajectory deviation is large |
| 3 | Poor | GPS signal reception is difficult, and positioning and navigation cannot be performed |
| IPSOGA | 500 | 7 | 0.7 | 0.1 | 0.5 | 1 | 8 | 10 |
| GA | 2000 | 7 | 0.7 | 0.1 | 0.5 | 1 | 8 | 0 |
| Total Group Number | Inertia Weight | Learning Factor | Learning Factor | |
|---|---|---|---|---|
| PSO | 2000 | 7 | 2 | 2 |
| IPSOGA | GA | PSO | PSO-ABC | ACO | Informed RRT * | A Star | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A * | CT | A | CT | A | CT | A | CT | A | CT | A | A | |
| 1 | 72.73 | 34 | 97.74 | 20 | 145.68 | 76 | 71.88 | 60 | 225.00 | 220 | 80.16 | 135 |
| 2 | 71.60 | 27 | 108.30 | 39 | 88.53 | 83 | 152.11 | 85 | 298.30 | 235 | 90.23 | |
| 3 | 67.01 | 23 | 71.21 | 29 | 85.06 | 100 | 128.02 | 55 | 213.69 | 310 | 109.37 | |
| 4 | 52.88 | 20 | 104.96 | 14 | 150.11 | 88 | 109.31 | 94 | 302.47 | 209 | 133.83 | |
| 5 | 69.71 | 34 | 118.13 | 46 | 91.85 | 106 | 187.46 | 75 | 257.11 | 244 | 92.28 | |
| 6 | 44.38 | 45 | 86.77 | 88 | 99.62 | 102 | 87.53 | 70 | 300.26 | 317 | 116.12 | |
| 7 | 44.18 | 45 | 58.43 | 94 | 131.71 | 122 | 99.11 | 113 | 348.69 | 161 | 102.19 | |
| 8 | 43.83 | 60 | 44.73 | 11 | 82.48 | 40 | 71.14 | 85 | 261.29 | 302 | 94.49 | |
| 9 | 44.09 | 41 | 48.23 | 40 | 106.07 | 146 | 82.57 | 97 | 208.30 | 223 | 77.87 | |
| 10 | 58.20 | 24 | 85.93 | 38 | 118.10 | 37 | 95.37 | 67 | 210.96 | 258 | 82.93 | |
| 11 | 55.10 | 61 | 66.49 | 86 | 143.81 | 48 | 91.59 | 95 | 315.00 | 191 | 138.39 | |
| 12 | 73.56 | 26 | 64.23 | 43 | 107.34 | 73 | 78.04 | 88 | 206.32 | 236 | 148.64 | |
| 13 | 72.33 | 26 | 71.05 | 14 | 128.17 | 32 | 147.03 | 93 | 225.00 | 208 | 111.41 | |
| 14 | 44.30 | 26 | 66.05 | 58 | 86.80 | 63 | 90.46 | 121 | 255.26 | 211 | 72.48 | |
| 15 | 53.00 | 61 | 87.19 | 20 | 152.35 | 53 | 182.74 | 107 | 338.19 | 235 | 115.20 | |
| 16 | 48.70 | 22 | 84.07 | 24 | 112.31 | 55 | 62.35 | 101 | 221.27 | 211 | 92.87 | |
| 17 | 64.95 | 32 | 95.67 | 22 | 108.66 | 53 | 185.20 | 98 | 225.00 | 170 | 105.21 | |
| 18 | 53.77 | 48 | 74.94 | 37 | 117.93 | 66 | 68.99 | 93 | 202.83 | 251 | 84.87 | |
| 19 | 46.50 | 18 | 40.41 | 79 | 167.35 | 79 | 75.86 | 64 | 225.00 | 223 | 78.97 | |
| 20 | 50.32 | 29 | 102.23 | 32 | 132.04 | 104 | 73.59 | 114 | 315.00 | 212 | 49.09 | |
| 21 | 63.70 | 32 | 76.31 | 11 | 134.72 | 35 | 82.26 | 99 | 270.00 | 254 | 105.35 | |
| 22 | 43.76 | 57 | 86.25 | 30 | 122.16 | 32 | 181.21 | 76 | 225.00 | 150 | 125.36 | |
| 23 | 79.11 | 47 | 54.93 | 65 | 103.09 | 54 | 89.87 | 114 | 270.00 | 187 | 81.46 | |
| 24 | 53.18 | 35 | 105.35 | 26 | 126.47 | 34 | 64.62 | 84 | 225.00 | 192 | 68.98 | |
| 25 | 49.36 | 43 | 71.99 | 55 | 114.09 | 74 | 73.76 | 72 | 240.54 | 213 | 157.23 | |
| 26 | 52.24 | 53 | 83.86 | 10 | 129.86 | 71 | 64.68 | 85 | 225.00 | 232 | 59.91 | |
| 27 | 50.61 | 21 | 109.31 | 39 | 53.53 | 31 | 69.02 | 72 | 206.57 | 227 | 70.70 | |
| 28 | 46.47 | 26 | 88.24 | 62 | 110.49 | 37 | 181.89 | 106 | 206.57 | 170 | 49.24 | |
| 29 | 50.23 | 31 | 87.85 | 34 | 105.26 | 39 | 73.80 | 67 | 298.30 | 243 | 89.20 | |
| 30 | 56.49 | 30 | 74.13 | 35 | 153.29 | 78 | 71.81 | 108 | 183.01 | 236 | 77.04 | |
| Average | 55.88 | 35.9 | 80.50 | 40.03 | 116.96 | 67.03 | 103.11 | 88.60 | 250.16 | 224.37 | 95.37 | 135 |
| Standard Deviation | 10.76 | 13.13 | 19.99 | 23.80 | 25.25 | 29.87 | 42.76 | 17.88 | 45.17 | 39.89 | 27.20 | - |
| IPSOGA | GA | PSO | PSO-ABC | ACO | Informed RRT * | A Star | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A * | CT | A | CT | A | CT | A | CT | A | CT | A | A | |
| 1 | 85.74 | 58 | 96.77 | 53 | 133.03 | 127 | 157.64 | 81 | 405 | 275 | 78.08 | 135 |
| 2 | 81.61 | 21 | 141.23 | 36 | 112.67 | 60 | 135.13 | 108 | 315 | 288 | 102.28 | |
| 3 | 81.01 | 34 | 90.31 | 58 | 117.59 | 116 | 117.72 | 66 | 405 | 261 | 79.21 | |
| 4 | 80.43 | 19 | 104.23 | 44 | 182.89 | 114 | 96.96 | 99 | 315 | 305 | 78.08 | |
| 5 | 63.82 | 53 | 115.06 | 43 | 109.58 | 96 | 123.82 | 78 | 495 | 329 | 102.28 | |
| 6 | 80.90 | 94 | 77.39 | 125 | 115.73 | 73 | 95.26 | 56 | 405 | 241 | 73.60 | |
| 7 | 85.72 | 25 | 138.19 | 36 | 133.90 | 56 | 117.14 | 83 | 405 | 295 | 127.32 | |
| 8 | 55.89 | 28 | 76.88 | 66 | 150.42 | 64 | 165.15 | 85 | 405 | 313 | 89.12 | |
| 9 | 61.82 | 32 | 97.25 | 54 | 115.96 | 73 | 116.08 | 76 | 405 | 341 | 45.14 | |
| 10 | 92.86 | 29 | 80.20 | 55 | 98.13 | 62 | 118.11 | 86 | 495 | 379 | 53.53 | |
| 11 | 68.57 | 37 | 88.19 | 32 | 132.87 | 58 | 128.42 | 98 | 495 | 411 | 83.24 | |
| 12 | 79.50 | 36 | 117.59 | 54 | 95.34 | 66 | 119.03 | 115 | 405 | 287 | 116.47 | |
| 13 | 70.13 | 43 | 126.70 | 67 | 131.76 | 78 | 149.11 | 76 | 405 | 243 | 45.29 | |
| 14 | 80.53 | 30 | 79.94 | 73 | 120.81 | 33 | 141.45 | 63 | 495 | 275 | 50.67 | |
| 15 | 55.95 | 28 | 88.65 | 41 | 153.63 | 86 | 92.33 | 92 | 405 | 288 | 49.13 | |
| 16 | 88.95 | 39 | 121.55 | 57 | 116.19 | 53 | 106.01 | 50 | 495 | 261 | 55.41 | |
| 17 | 67.58 | 28 | 88.69 | 33 | 127.03 | 52 | 151.26 | 68 | 405 | 311 | 71.37 | |
| 18 | 65.20 | 41 | 103.12 | 91 | 162.05 | 50 | 103.85 | 67 | 495 | 305 | 84.85 | |
| 19 | 78.70 | 22 | 95.24 | 75 | 108.79 | 71 | 118.11 | 76 | 495 | 329 | 73.53 | |
| 20 | 78.93 | 23 | 97.13 | 47 | 118.99 | 86 | 152.60 | 81 | 315 | 241 | 129.66 | |
| 21 | 84.56 | 38 | 115.28 | 32 | 134.94 | 83 | 125.77 | 62 | 315 | 295 | 79.79 | |
| 22 | 69.13 | 49 | 114.20 | 41 | 100.81 | 71 | 114.63 | 61 | 405 | 436 | 88.29 | |
| 23 | 66.99 | 57 | 93.75 | 73 | 104.95 | 83 | 127.81 | 117 | 495 | 313 | 108.24 | |
| 24 | 76.17 | 34 | 86.96 | 58 | 164.35 | 81 | 145.82 | 64 | 405 | 347 | 107.69 | |
| 25 | 85.57 | 37 | 60.35 | 35 | 143.56 | 58 | 100.06 | 55 | 495 | 341 | 50.32 | |
| 26 | 69.52 | 27 | 90.72 | 55 | 158.14 | 77 | 103.18 | 86 | 405 | 287 | 109.24 | |
| 27 | 79.90 | 32 | 110.04 | 44 | 149.78 | 107 | 154.53 | 83 | 315 | 315 | 88.55 | |
| 28 | 75.48 | 39 | 112.87 | 31 | 136.07 | 70 | 127.82 | 52 | 495 | 341 | 95.15 | |
| 29 | 80.77 | 22 | 103.39 | 44 | 131.98 | 87 | 101.67 | 78 | 495 | 298 | 44.15 | |
| 30 | 84.72 | 25 | 92.69 | 57 | 121.40 | 52 | 126.28 | 56 | 495 | 339 | 81.93 | |
| Average | 75.89 | 36.00 | 100.15 | 53.67 | 129.45 | 74.77 | 124.42 | 77.26 | 426.00 | 309.67 | 81.39 | 135 |
| Standard Deviation | 9.60 | 15.04 | 18.49 | 20.08 | 21.44 | 21.55 | 20.37 | 17.96 | 65.51 | 45.72 | 24.74 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, Y.; Wen, Y.; Gao, H.; Wang, T.; Wan, J.; Lan, J. A Path-Planning Method for Wall Surface Inspection Robot Based on Improved Genetic Algorithm. Electronics 2022, 11, 1192. https://doi.org/10.3390/electronics11081192
Tao Y, Wen Y, Gao H, Wang T, Wan J, Lan J. A Path-Planning Method for Wall Surface Inspection Robot Based on Improved Genetic Algorithm. Electronics. 2022; 11(8):1192. https://doi.org/10.3390/electronics11081192
Chicago/Turabian StyleTao, Yong, Yufang Wen, He Gao, Tianmiao Wang, Jiahao Wan, and Jiangbo Lan. 2022. "A Path-Planning Method for Wall Surface Inspection Robot Based on Improved Genetic Algorithm" Electronics 11, no. 8: 1192. https://doi.org/10.3390/electronics11081192
APA StyleTao, Y., Wen, Y., Gao, H., Wang, T., Wan, J., & Lan, J. (2022). A Path-Planning Method for Wall Surface Inspection Robot Based on Improved Genetic Algorithm. Electronics, 11(8), 1192. https://doi.org/10.3390/electronics11081192