This section will cover the design of the guinea fowl jumping robot and the momentum wheel mechanism. Then, we will analyze the dynamic model of the guinea fowl jumping robot and the momentum wheel model.
2.1. Design of Leg Model of Guinea Fowl Jumping Robot
The vertical jumping performance of the guinea fowl is important to control the jumping angle of the robot in the air. To provide vertical jumping, we consider the limb angle and bone structure. First, to design the linkage structure, it is necessary to see how the leg angle of the guinea fowl changes over time. As described in [
16], the preparation time for jumping required is 270 ms from the initial position and the jumping energy value reaches the maximum at 0 ms. The state when the guinea fowl has maximum jumping energy is called the pre-takeoff (PRT) stage. The guinea fowl starts to release the jumping energy using the leg muscles at 0 ms, and the time of maximum jumping energy emission is 120 ms. At 120 ms, the guinea fowl fully stretches its two legs, and this state is called the post-takeoff (POT) stage.
To construct the linkage model based on the limbs of the guinea fowl, it is necessary to analyze how the leg angle changes when the state changes from PRT to POT. This reference also investigated the limb angle of the guinea fowl model: in the initial motion of the guinea fowl, hip angle, knees angle, ankle angle, and toe angle are 43 5 degrees, 64 3 degrees, and 90 9 degrees, respectively. When the guinea fowl moves its posture into PRT, hip angle, knees angle, ankle angle, and toe angle become 30 3 degrees, 54 4 degrees, 45 5 degrees, and 160 3 degrees, respectively. Finally, at the POT stage, hip angle, knees angle, ankle angle, and toe angle are 98 3 degrees, 97 4 degrees, 154 5 degrees, and 173 4 degrees, respectively, and the guinea fowl fully stretches the limb and starts to take-off.
Besides, we consider the bone structure of the guinea fowl’s leg. The leg consists of the femur, tibiotarsus, tarsometatarsal, digits, and hallux. We measured the bone length introduced in the reference so we could determine that the length ratio of the limb bone is 1:1.5:0.8:0.75:0.37 [
16,
17,
18,
19].
The linkage model of the robot is created by mimicking the joint angle and the bone structure of the guinea fowl model shown in
Figure 1. This linkage structure is designed such that the whole link can move using one motor and it is considered the bone length ratio of the guinea fowl model. In the actual guinea fowl bone model, the tarsometatarsal and the digits are composed of different bones. However, in the designed linkage model, these two parts are united. This is because the designed robot’s legs can only be moved by one motor.
The guinea fowl moves digits when jumping or running, allowing it to move more efficiently depending on the environment. To create this motion, we need an additional motor, but if we attach an additional motor, the jumping robot becomes heavy. To solve these problems, we designed the hallux that can move passively when the digits angle is changed. In
Figure 1, when the guinea fowl robot changes from the PRT (left) to the POT (right), the legs can stably stand on the ground. We used the LINKAGE program to test the designed linkage model. The simulation results are shown in
Figure 2c. We confirmed that the hallux can stably contact the ground, and we checked that the trajectory of jumping is vertical.
Then, we carried out a closed loop equation and simulation to assess whether the non-passive hallux model can perform the PRT and POT stages on the ground.
Figure 2a shows the closed-loop equation model for the jumping trajectory that changes when the non-passive hallux model is moved from POT to PRT.
Figure 2a shows the trajectory of the joint of hallux (
) that changes when the rotational joint (
) rotates by
. In the linkage model, each joint point is defined from A to
, and the coordinates of each point are defined as
. Next, the rotation angle for each link is expressed in the form of
. In
Figure 2a, the closed-loop equation for the ground joints A, B, C, and D to the joint of hallux (
) can be defined by Equations (1)–(7). Through Equations (6) and (7), we can obtain the
coordinates that change according to the rotation angle of the motor, and the optimal values for the length and change angle of each link can be obtained using Equations (1)–(7).
Then, we verified how the coordinate of the joint of the hallux rotates as the linkage structure changes, as shown in
Figure 2b. In the non-passive hallux model, the angle between hallux and digit is fixed. When the initial coordinates of the joint of the hallux in the non-passive hallux model are set to
(x,y), the coordinates of the joint of hallux that change from POT to PRT become
(x’,y’). In addition, before the non-passive hallux model moves, the point of contact with the ground is set to O(0,0), and point O is assumed as the anchor. Besides, the changing angle as the joint of hallux is defined as
. As a result, we can define the vector equation as Equation (8). To increase the jumping stability when the robot changes from the POT stage to the PRT stage,
should be maintained at 0 degrees.
The simulation results for the passive hallux model and the non-passive hallux model are shown in
Figure 2c. The red line is the non-passive hallux model, and the blue line is the passive hallux model. Furthermore, it takes 120 ms for the robot to change the motion from the POT stage to the PRT stage. In the case of the non-passive hallux model,
changed from 0 degrees to 25 degrees over time. For this reason, when the robot reaches the PRT stage, the robot is lifted backwards and then tilted forwards from 120 ms to 240 ms. In contrast, the passive hallux model maintains the
to 0 degrees until the PRT stage, and hence the robot can stand stably when the robot reaches the POT to PRT stage.
In the case of Salto-1P, a non-passive hallux model can be used to initiate a jump only at the PRT stage. However, in the case of the passive hallux model, the jumping robot can start the first jump in the POT stage as well as the PRT stage. This advantage can increase the initial stability by positioning the robot such that it can return to its original position even if an initial jumping error occurs. As a result, the passive hallux model contributes to the stability of the pre-jumping motion and vertical jumping motion.
2.2. Design of Trigger Mechanism
To design the trigger mechanism, we considered a torsion spring and rubber band. The spring model corresponding to the muscle attached to the femur uses a torsion spring, and a rubber band is used to transmit the force between the femur and the tarsometatarsal. First, we chose the torsion springs model. We use four torsion springs to accumulate the jumping energy, and the spring constant is 38.3 Nmm/deg. Second, we consider the torsion spring part of the trigger mechanism. The implemented force transmission structure using the torsion spring model is shown in
Figure 3a. The yellow part is the femur, and the torsion spring is fixed to the femur. The operation mechanism is as follows. First, when the motor moves, the cam pushes the roller and swinging bar to compress the torsion spring. When the torsion spring is fully compressed, the cam reaches the critical point. If the cam passes the critical point, the torsion spring starts to release the elastic energy.
Then, we considered the muscle located between the femur and the tarsometatarsal. For transmitting the jumping energy to the linkage model efficiently, we considered the leg model by mimicking the muscles of each part. The mechanism designed with a rubber band is shown in
Figure 3b. As shown in
Figure 3b, we attached the rubber band to the joint of the femur and the joint of the tarsometatarsal. As a result, when the whole link moves, the rubber band is stretched, and the jumping energy is accumulated. Like the torsion spring mechanism, when the cam passes the critical point, the elastic energy starts to release. We wound the rubber bands nine times to the limb model. In addition, we performed ten iterations of tensile tests and confirmed that the spring constant of the rubber band is 50 N/m.
After we chose the spring model and trigger mechanism, we calculated the jumping height. Our goal is to create a robot that can jump 20 cm without a balance control circuit. The equation for calculating the jumping height is given in Equation (9), where
is the jumping height,
is the takeoff angle, and
is the stiffness coefficient of the torsion spring.
is the maximum compression angle of the torsion spring,
is the number of torsion springs, and
is the number of times the rubber band is wound.
is the stiffness coefficient of the rubber band,
is the stretched length of the rubber band,
is the moment of inertia of the jumping robot,
is the angular velocity that occurs when the robot starts jumping, and
is the mass of the guinea fowl jumping robot.
Table 1 shows the parameter values for calculating the jumping height. Through the calculation, we confirmed that the jumping height is 25.3 cm and that the jumping robot can jump 20 cm.
To accumulate elastic energy using torsion springs and rubber bands, we selected a motor that can provide sufficient torque to the cam. The equation for obtaining the required torque to rotate the cam is given in Equation (10).
is the required torque of the system,
is the distance between the point
and the operating line of force
,
is the distance between the point
and the operating line of force
, and
is the rotation angle of the swinging bar. The required torque obtained by using the values in
Table 1 is 4789.63 Nmm.
We use the DCX model of the MAXON motor. The torque value of this motor is 11.6 Nm, the maximum allowable speed of the motor is 13,100 rpm, the rated output is 10 W, and the gearhead is the GPX 16: 1 model. In addition, we designed a 13:1 reduction gear to increase the torque of the cam, and we designed a cam that can jump two times per cycle to double the torque. Through the calculation, the torque of the cam is 4825.60 Nmm and its angular velocity is 0.52 rev/s. As a result, we can see that the cam has enough torque to compress the torsion spring and the rubber band, and the robot can jump twice in one second.
Next, we checked how the coordinates of the center of mass (C.M.) change when the jumping robot changes from the PRT stage to the POT stage.
Figure 3c shows the center of mass for the PRT stage and POT stage. In this figure, the red line is the x-axis, the green line is the y-axis, and the blue line is the z-axis.
Figure 3c shows the coordinates of C.M. during the PRT stage, and the coordinates are (16.431, −11.168, −21.025). The coordinates of C.M. are (17.996, −11.168, −47.040). At this time, for the robot not to fall while bending the leg, the variation of the x-axis must be within 2 mm. Since the variation of the x-axis is 1.565 mm, we can see that C.M. is located on the line when the robot is changing from the PRT stage to the POT stage.
2.3. Design and Analysis of Momentum Wheel Mechanism
A balance control mechanism is needed to balance the robot after jumping and adjust the jumping angle before landing [
13,
20]. The jumping robot should be able to control the body angle in the stance phase and takeoff phase by using the balance control mechanism. A jumping robot can perform a stable landing if the body angle is maintained. To control the body angle of the guinea fowl jumping robot, we chose the momentum wheel as a method to control the balance of the robot. The reason for using the momentum wheel is that it can reduce the volume of the balance control mechanism better than other jumping robots using an inertial tail. As a result, we can control the robot more stably due to the decrease of the probability of collision with obstacles. In addition, the momentum wheel can generate a large control output with a small control input, so the control efficiency is high [
19,
20,
21,
22]. These advantages allow the robot to avoid obstacles stably and help to control the jumping angle and jumping height when the user adjusts the body angle of the jumping robot by using the control signal.
Figure 4 shows the balance control process of a guinea fowl jumping robot with a moment wheel. The blue arrow indicates the direction of the movement,
is the jumping height,
is the jumping distance,
is the initial body angle, and
is the changed body angle. The black circle superimposed on the robot’s body indicates the momentum wheel, the torque of the jumping robot is
(yellow arrow), and the torque of the momentum wheel is defined as
(green arrow). At the first jump, the robot jumps vertically to control the jumping angle of the next jump, and the second jump shows how the jumping angle changes when the body angle is adjusted.
In
Figure 4a, the body angle of the jumping robot is 0 degrees. After the jump, torque is applied to the robot. For this reason, the jumping height will be reduced. To compensate for this, the torque direction of the momentum wheel must be operated in the opposite direction to the torque direction of the jumping robot before the robot jumps, as in
Figure 4a. In
Figure 4b, the jumping robot reaches the maximum height. At this time, the robot must rotate the momentum wheel in the
direction to decrease the generated torque value in the
direction. In
Figure 4c, the jumping robot controls the body angle to
using the momentum wheel. Before the robot reaches the landing point, the torque value of the momentum wheel should be larger than the torque value of the jumping robot.
In
Figure 4d, the jumping energy of the jumping robot is maximized, and the front foot of the robot reaches the landing point. After the landing, the center of gravity of the robot moves forward, and torque is applied to the robot in the
direction. At this time, the direction of the momentum wheel to maintain the balance is
. When the robot starts jumping, the jumping angle is 90 −
. The jumping angle and jumping height become smaller, but the jumping distance of
is bigger than
.
Figure 4e controls the body angle of the jumping robot as in
Figure 4b, and the jumping robot stably lands on the ground and prepares for the next jump, as shown in
Figure 4f.
Figure 4 shows that the jumping angle, height, and jumping length can be adjusted by controlling the body angle of the jumping robot using the 1-axis momentum wheel mechanism. For continuous jumping and stable landing, the jumping robot needs to maintain the body angle at 0 degrees during the stance phase and takeoff phase. Moreover, to apply the jumping robot to the actual environment, it is necessary to attach the 3-axis momentum wheel mechanism to the jumping robot. However, in this paper, we will discuss the basic study on the 1-axis momentum wheel mechanism to allow for a stable and continuous jumping motion.
As a result, to design the 1-axis momentum wheel mechanism, we have to consider the torque value that occurs when the robot starts jumping.
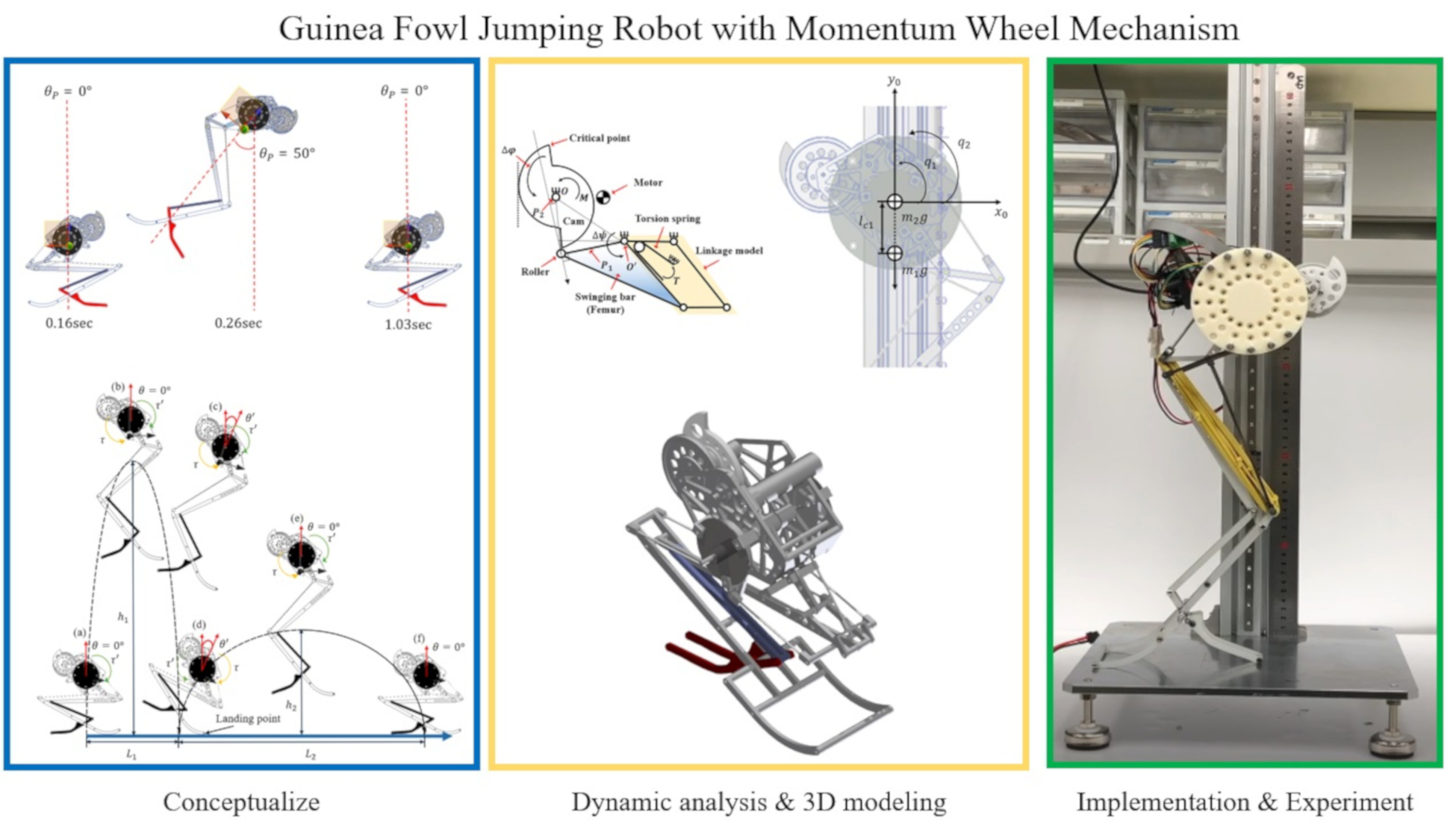
Figure 5 shows the assumption of the change of the body angle after jumping.
is the body angle, and the red line is the line connecting C.M. and joint A, and it can be seen that it is perpendicular to the ground. Unlike the jumping experiment, the tilted angle is set to 50 degrees at 0.26 s. The reason for this is that the momentum wheel must be able to control the robot even if the robot’s body is tilted by 50 degrees. Next, to calculate the angular acceleration, we considered the change of time and
between 0.16 s and 0.26 s. The variation of time is 0.1 s, and the variation of the body angle is 50 degrees. Thus, the angular acceleration of the jumping robot is 43.195 rad/
. We subsequently calculate the moment of inertia using the Autodesk inventor. The value of the moment of inertia of guinea fowl jumping robot is 4519.018 kg
.
Using Equation (11), we can calculate the torque value when the robot starts jumping. At this time, if the torque value of the momentum wheel is equal to the torque value generated while jumping, it is possible to cancel the torque. Therefore, our goal is to control the altitude by canceling the torque, and thus we need to adjust the moment of inertia of the momentum wheel. At this time, the angular acceleration of the motor is obtained by dividing the mechanical time constant by 63.2% of the nominal speed, and the value of the maximum angular acceleration of the motor is 10,279 rad/
. In Equation (11),
represents the maximum moment of inertia on the y-axis of the robot, and the value is 6678.5
. This is because the moment of inertia is multiplied by 1.5 for the safety factor.
is the moment of inertia of the rotor, and the value obtained using the datasheet of the EC45 flat motor is 5.23
. The value of
is the angular acceleration of the robot’s body, and this value is 43.195
.
is assumed to be 80 g by the weight of the momentum wheel.
is the radius of the momentum wheel,
is the angular acceleration of the motor, and the value of
is 10,279 rad/
. The radius of the momentum wheel obtained by substituting the parameter to Equation (11) is 5.1 cm. Salto-1P has an inertial tail mechanism, and the length of the inertial tail is 15 cm. As a result, we see that the momentum wheel mechanism can reduce the volume of the inertial tail mechanism.
Next, to verify the performance of the momentum wheel, we design the experiment apparatus as shown in
Figure 6a. We fix the jumping robot to the rotating joint with Slider A so that it can test whether the body of the robot moves when the jumping robot activates the momentum wheel. In addition, we can fix Slider A by fixing Slider B. At this time, if Slider B is released, we can perform the jumping experiment using the momentum wheel. As a result, the performance of the momentum wheel can be confirmed by using the experimental apparatus, and the continuous jumping performance of the jumping robot can be tested by releasing Slider B.
Figure 6b is the dynamic model of the jumping robot with the momentum wheel. When
,
,
denotes the body angle of the jumping robot, and
is the angle of the inertia wheel.
is the mass of the jumping robot, and
is the mass of the momentum wheel.
is the distance from the anchor to the center of mass of the momentum wheel,
is the distance from the anchor to the center of mass of the jumping robot,
is the moment of inertia of the robot, and
is the moment of inertia of the inertia wheel.
To calculate the dynamic model, we use the Euler–Lagrange equation, given in Equation (12). The first term of Equation (12) is the kinetic energy part that consists of the translational kinetic energy and rotational kinetic energy part. The second part is Coriolis terms, and the third part is the potential energy part. Our goal is to obtain the inertia matrix by adding the translational kinetic energy and the rotational kinetic energy, and then calculating the Coriolis terms and the potential energy part. These parts will be used to define the control parameters.
First, to find the inertia matrix
, we consider the Jacobian expression
. The results of
are shown in Equations (13) and (14).
Then, to calculate the kinetic energy part of Equation (12), we can obtain the translational part of the kinetic energy using Equation (15).
After we calculate the rotational kinetic energy part, we consider the angular velocity terms using Equation (16).
When expressed in the base inertial frame, the rotational kinetic energy of the balance control system is then given by Equation (17). Finally, using Equations (15) and (16), we can find the inertia matrix using Equation (18).
Next, to find the potential energy term of Equation (12), we can use Equation (19).
After finding the potential energy, we can obtain the function of potential energy using Equation (20). The potential energy function is a partial derivative of the potential energy with the angle value.
Next, to calculate the Coriolis term, we consider the Christoffel symbols via Equation (21).
After calculating the Coriolis terms, we see that the Coriolis terms become zero. We can then obtain Equations (22) and (23).
In Equation (23), the value of
denotes the torque constant of the EC motor and the value is 10.4 mNm/A. The value of
is the current value and it can be controlled by the user up to 2A when using the EPOS24/2 Maxon motor controller. The parameters for obtaining the dynamic model of the guinea fowl jumping robot are shown in
Table 2. Using Equation (23), we can derive Equation (24).
However, it is difficult to control the body angle by using the angular acceleration of the motor as a variable for controlling the whole system. For this reason, to control the body angle of the jumping robot, the current should be used rather than the acceleration of the motor. As a result, we can obtain Equation (25).






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}