
Application of Weld Scar Recognition in Small-Diameter Transportation Pipeline Positioning System


Abstract
:1. Introduction
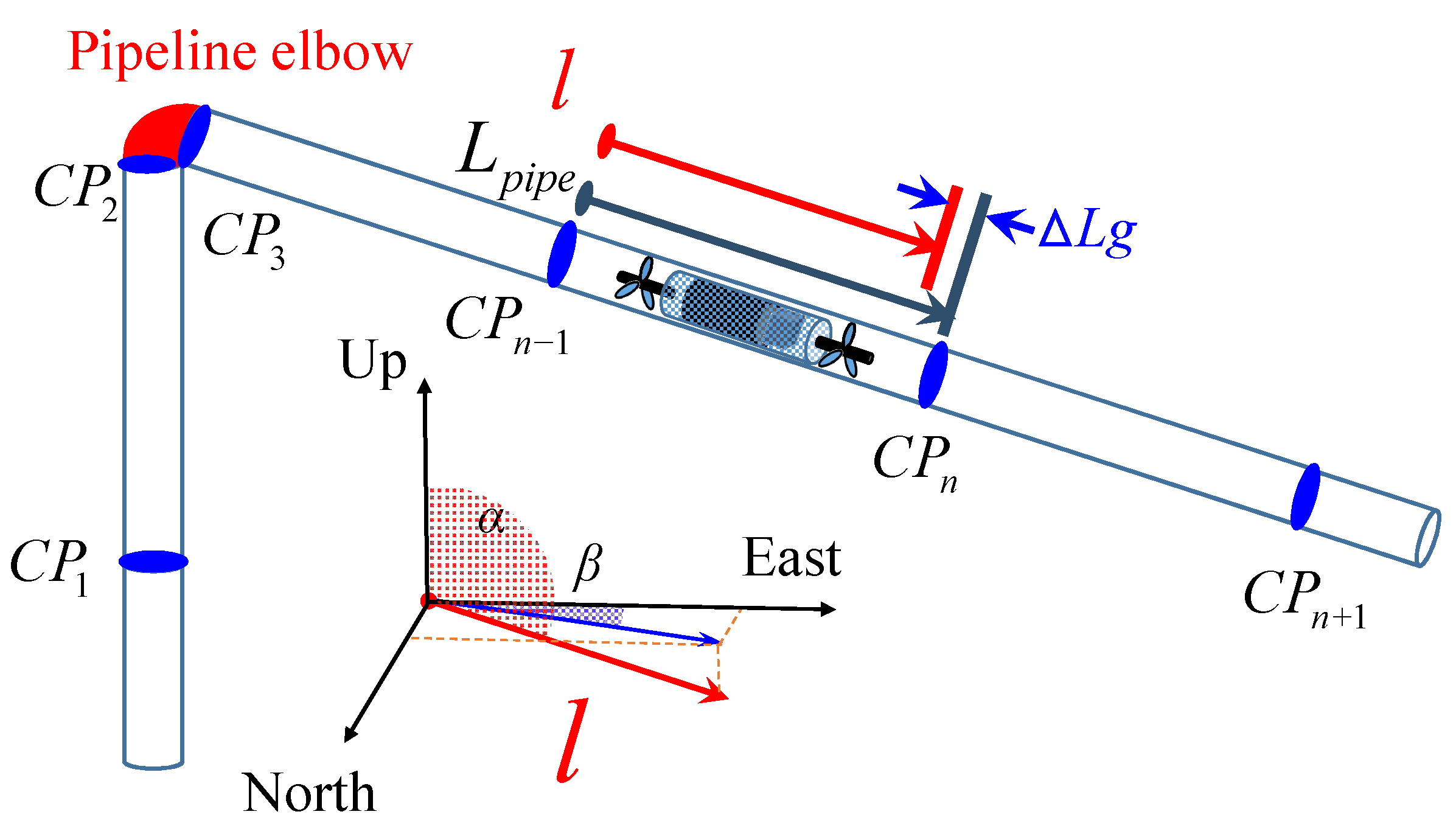
2. Collision Modeling and Noise Analysis
3. Characteristic Position Recognition
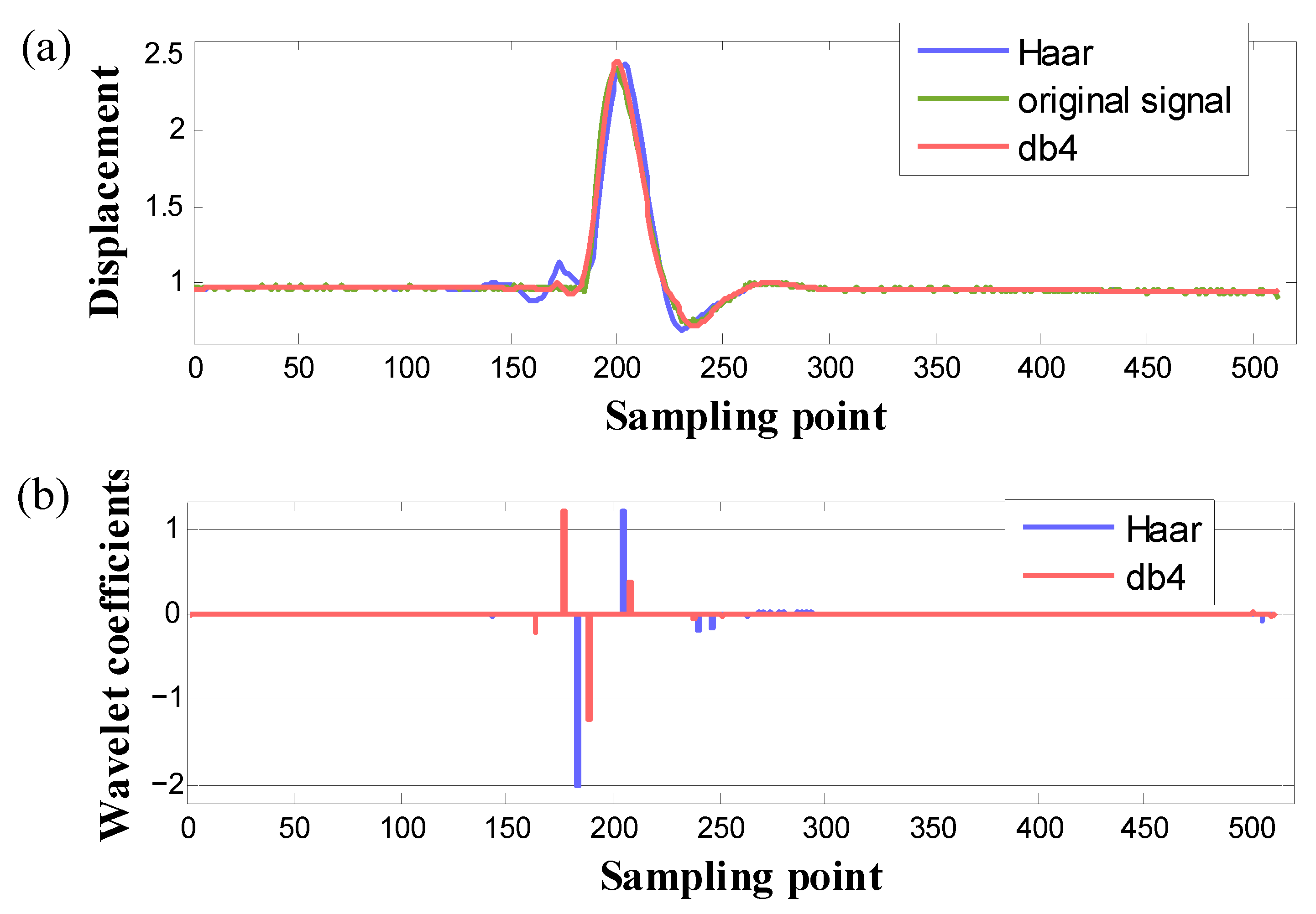
3.1. Optimal Wavelet Selection
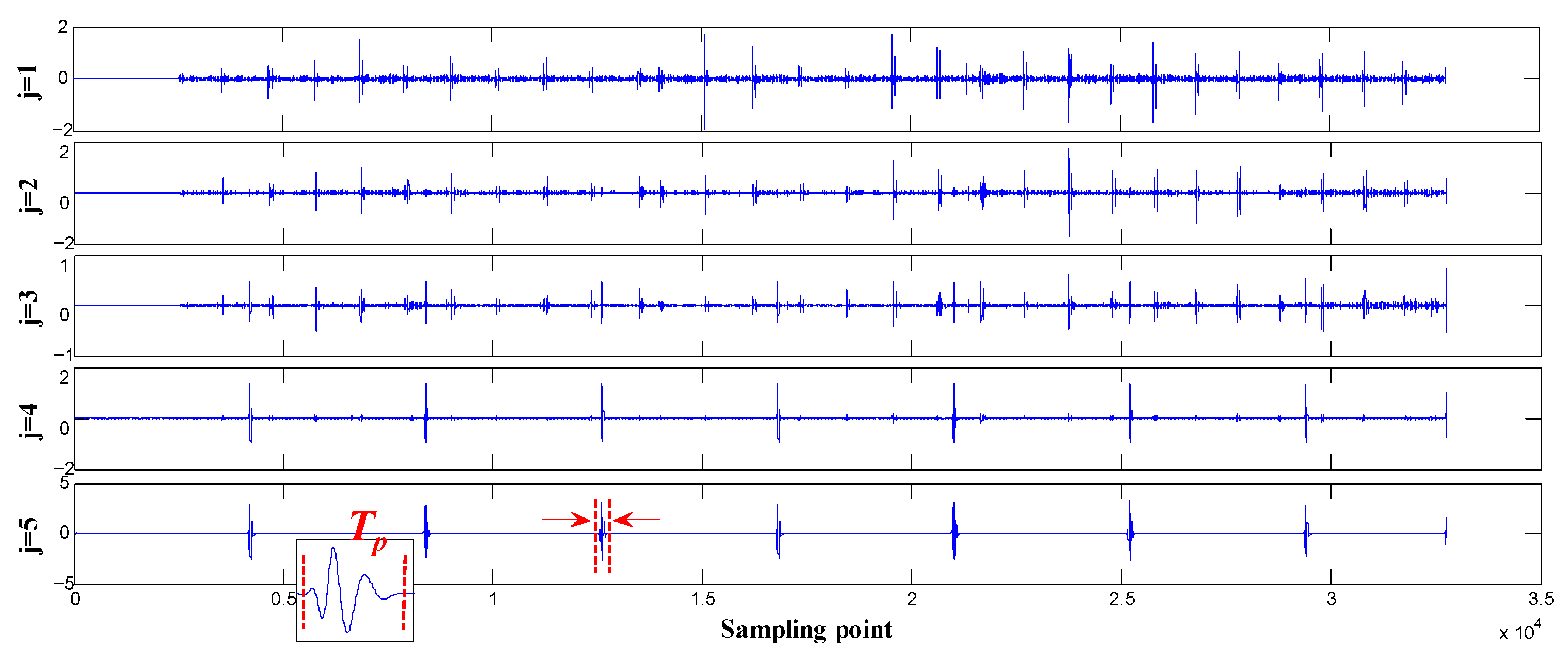
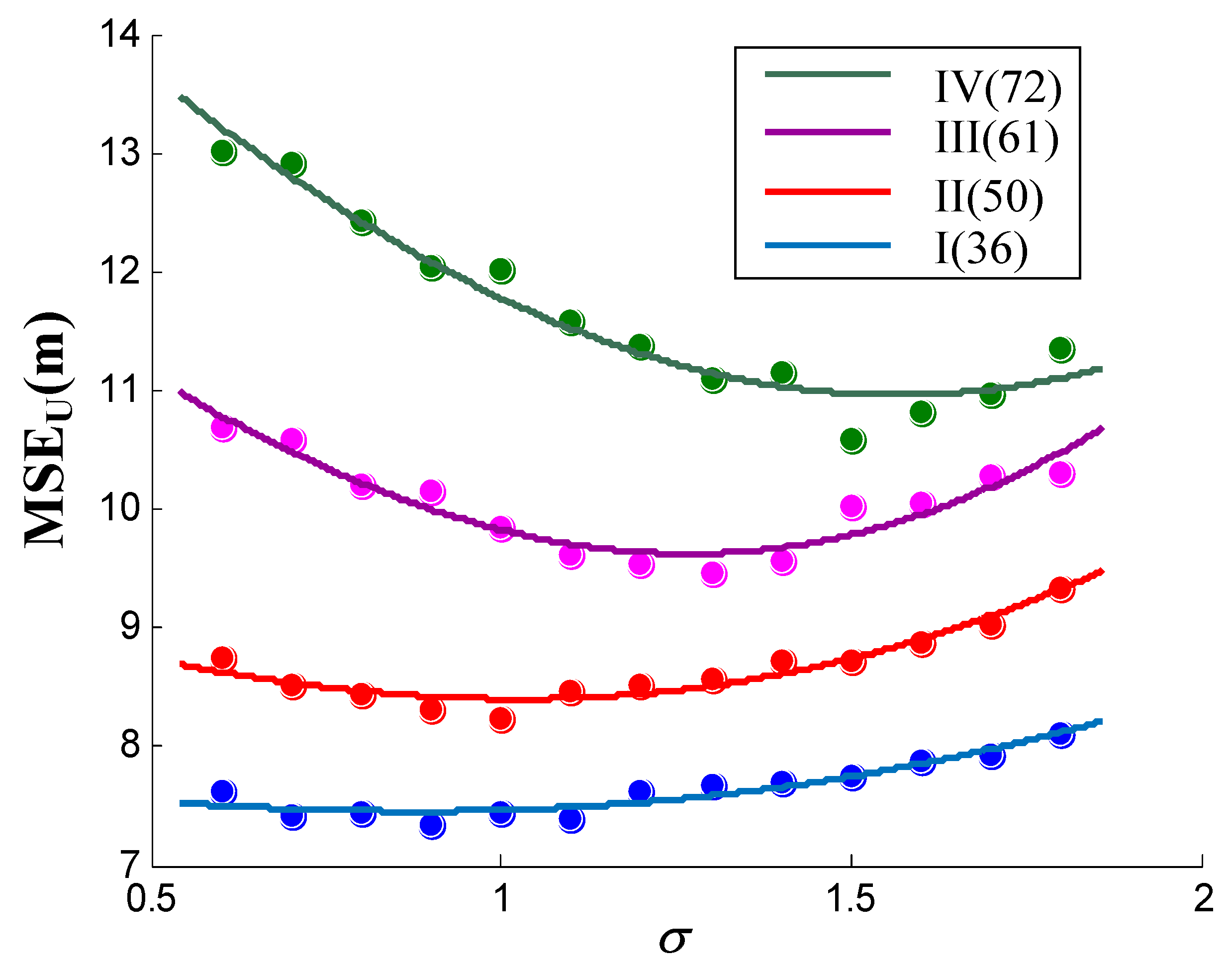
3.2. Decomposition Level Selection
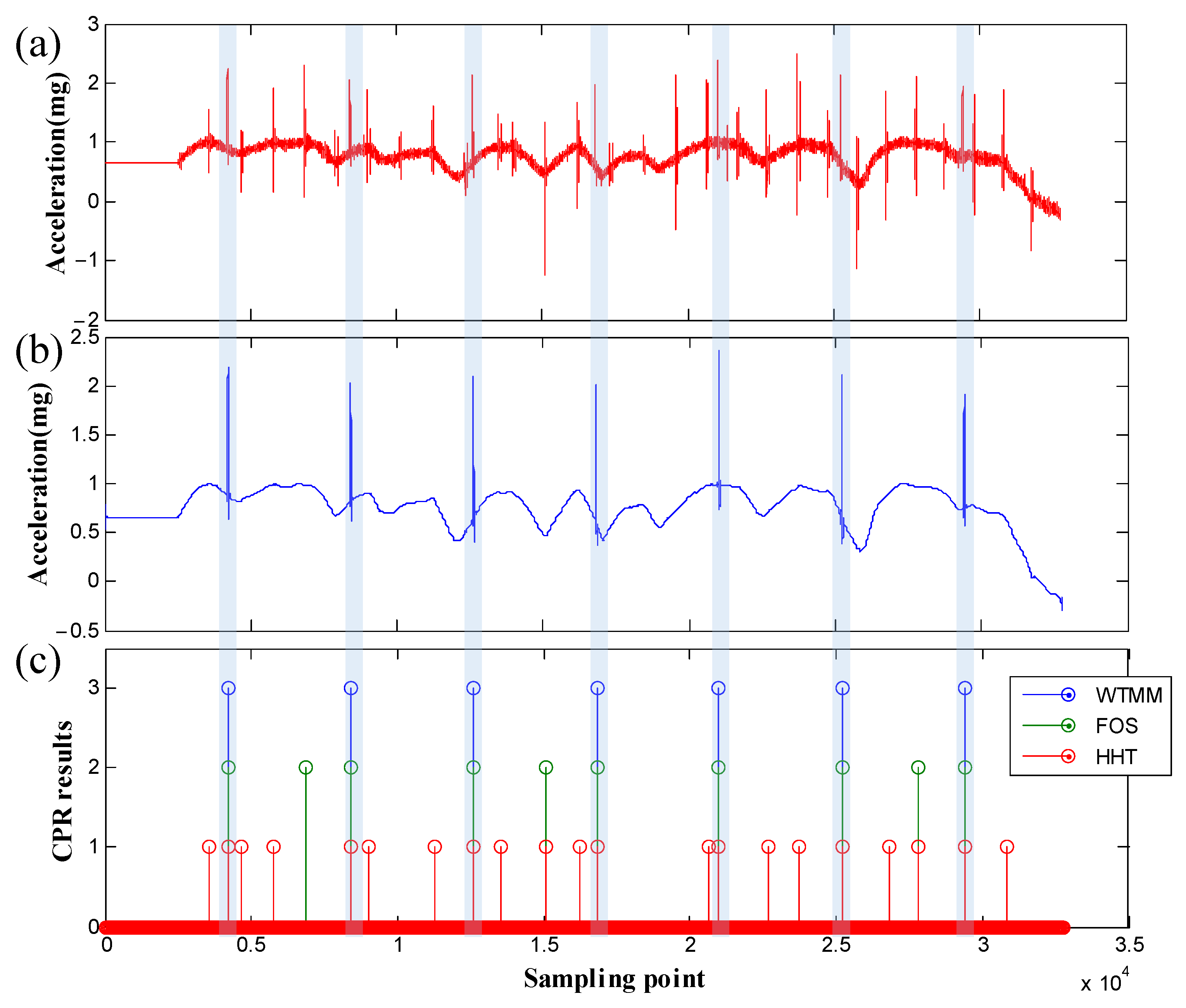
3.3. Characteristic Position Recognition
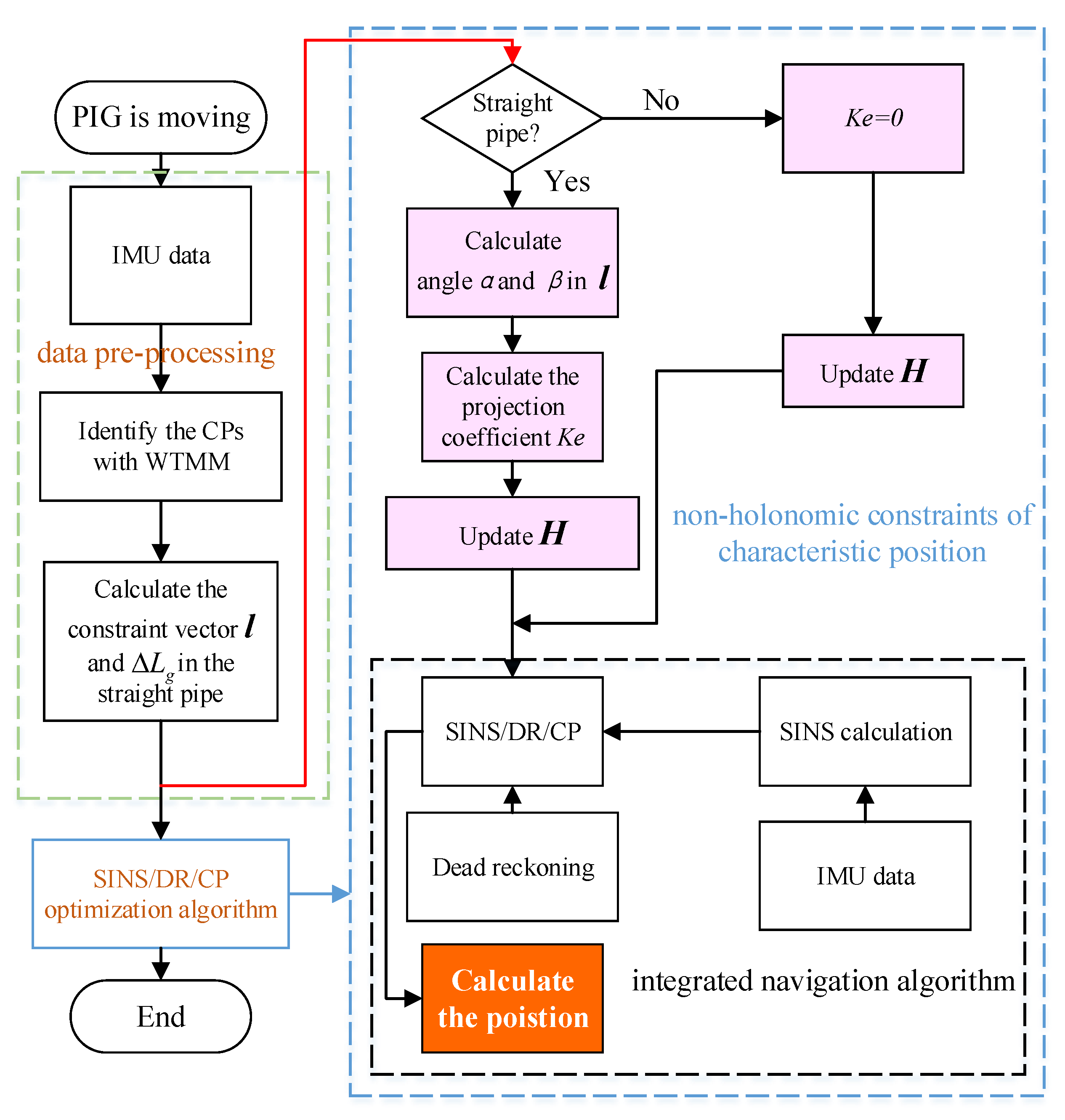
4. Models of SINS/DR/CP System
4.1. System Error Model
4.2. System Design Model
5. Simulation and Experiment
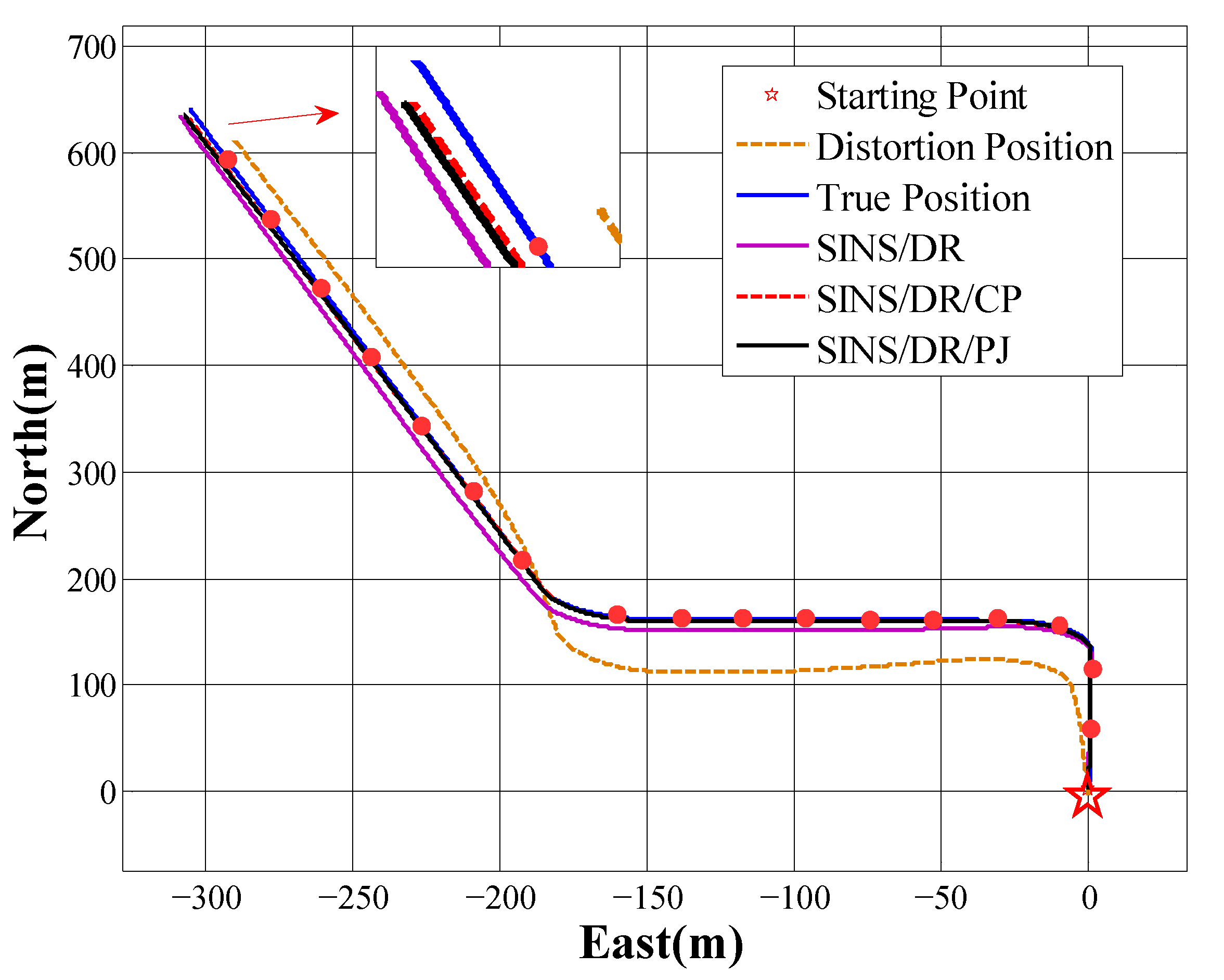
5.1. Simulation Results
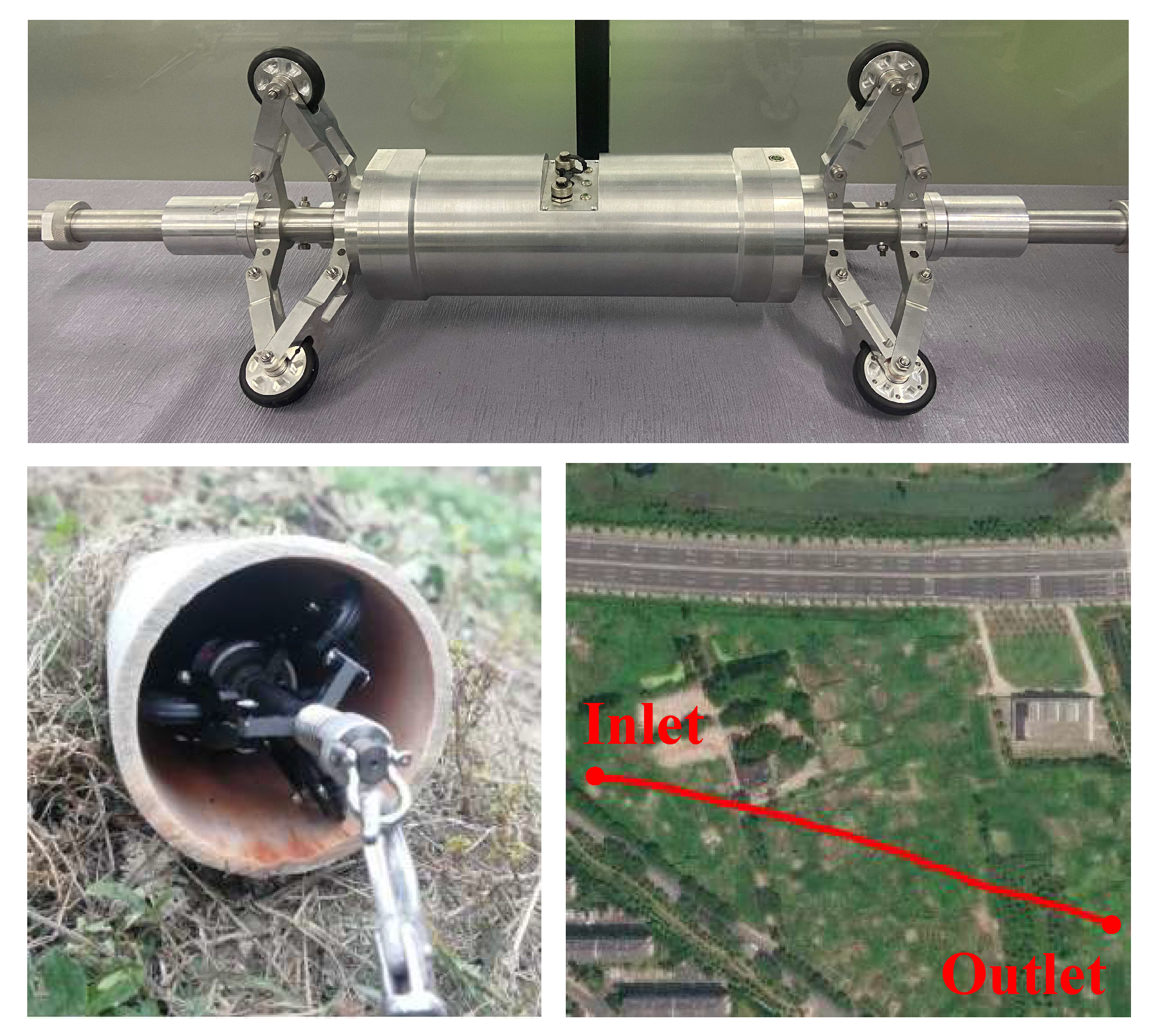
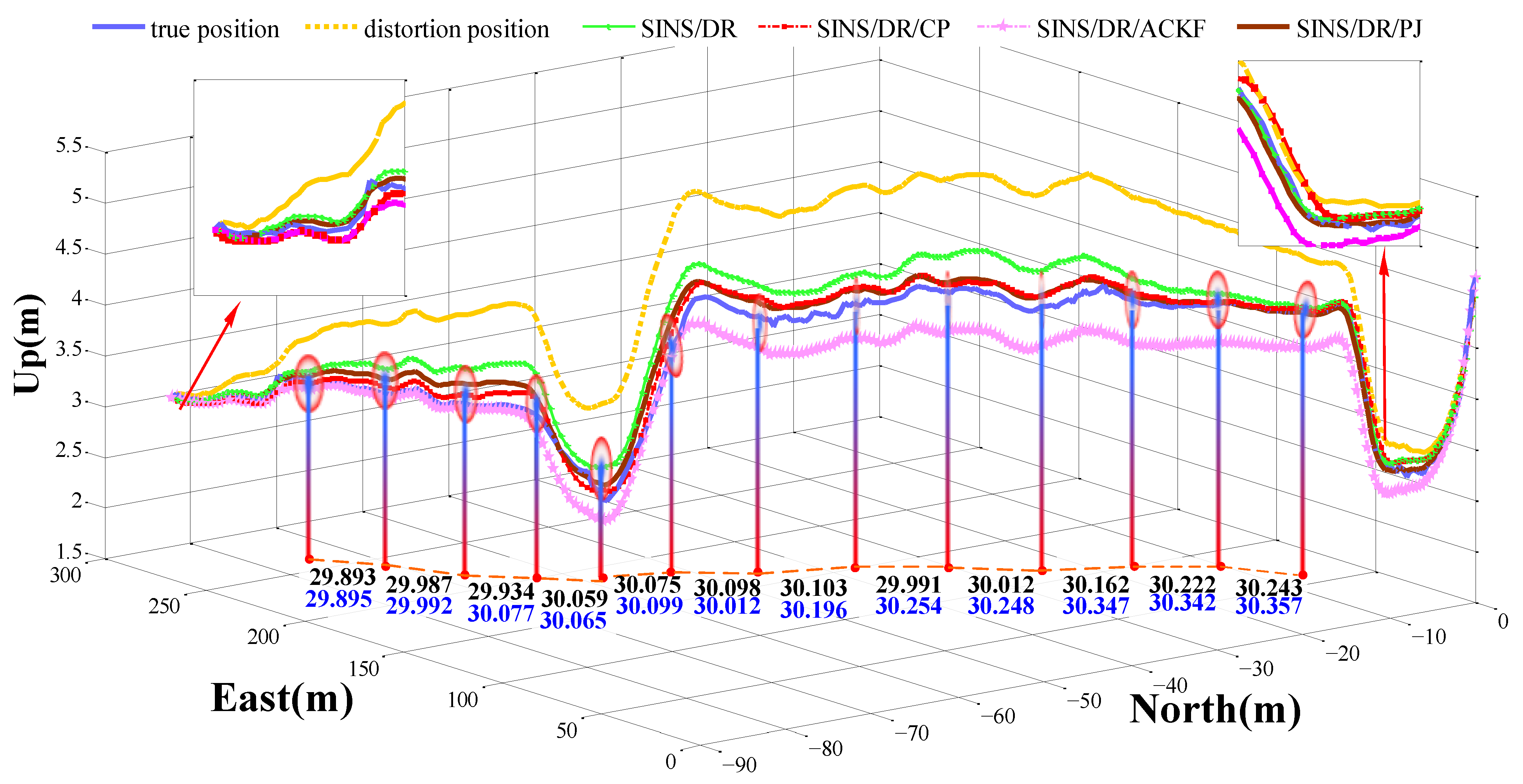
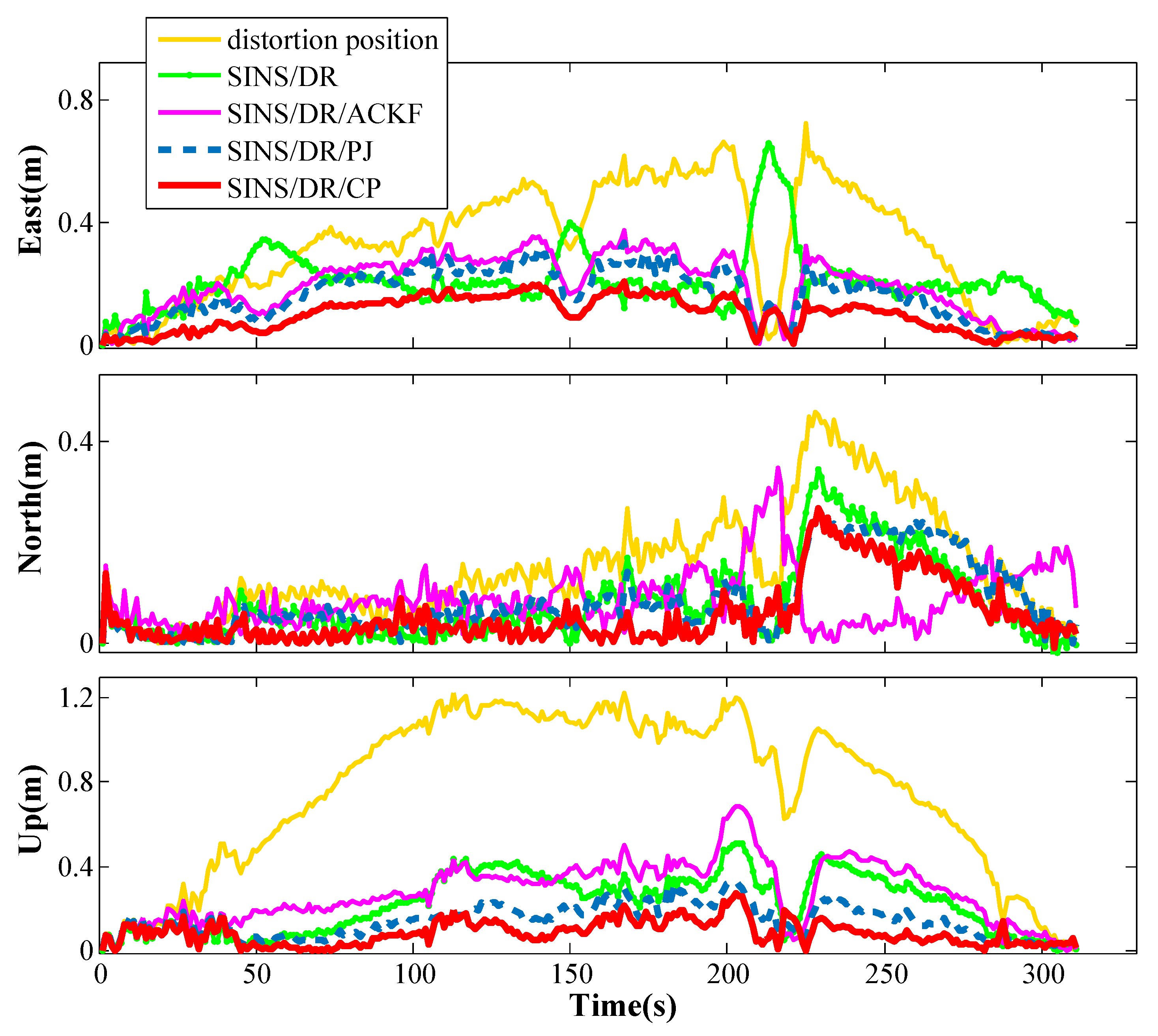
5.2. Experiment Results
- *
- Use real-time kinematic technology (RTK) to obtain pipeline real position.
- *
- Keep the PIG still at the pipe inlet and complete the initial alignment.
- *
- Follow the direction of the arrow on the PIG, push the PIG slowly into the pipe until the rear is flush with the pipe entrance, let it stand for 1 min, and pull the iron chain connected with the PIG until the PIG reaches the end of the pipeline.
- *
- Keep PIG still for 1 min, pull the PIG back at the pipeline inlet.
- *
- Repeat the above process three times.
- *
- Read the data stored in the SD card, and calculate the trajectory of the pipeline.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Souas, F.; Safri, A.; Benmounah, A. A review on the rheology of heavy crude oil for pipeline transportation. Pet. Res. 2021, 6, 116–136. [Google Scholar] [CrossRef]
- Pérez-Pérez, E.; López-Estrada, F.; Valencia-Palomo, G.; Torres, L.; Mina-Antonio, J.D. Leak diagnosis in pipelines using a combined artificial neural network approach. Control Eng. Pract. 2021, 107, 104677. [Google Scholar] [CrossRef]
- Xiao, R.; Hu, Q.; Li, J. A model-based health indicator for leak detection in gas pipeline systems. Measurement 2020, 171, 108843. [Google Scholar] [CrossRef]
- Lameri, S.; Lombardi, F.; Bestagini, P.; Lualdi, M.; Tubaro, S. Landmine detection from GPR data using convolutional neural networks. In Proceedings of the 2017 25th European Signal Processing Conference (EUSIPCO), Kos Island, Greece, 28 August–2 September 2017. [Google Scholar]
- Lang, X.; Li, P.; Guo, Y.; Cao, J.; Lu, S. A Multiple Leaks’ Localization Method in a Pipeline Based on Change in the Sound Velocity. IEEE Trans. Instrum. Meas. 2019, 69, 5010–5017. [Google Scholar] [CrossRef]
- Moles, M.; Dubé, N.; Labbé, S.; Ginzel, E. Pipeline girth weld inspections using ultrasonic phased arrays. In Proceedings of the ASME Pressure Vessels & Piping Conference, Vancouver, BC, Canada, 17–21 July 2016. [Google Scholar]
- Xu, Y.; Wang, T.; Gao, S.; Li, J.; Qiao, L. Pipeline leak detection using Raman distributed fiber sensor with dynamic threshold identification method. IEEE Sens. J. 2020, 20, 7870–7877. [Google Scholar] [CrossRef]
- Narkhov, E.D.; Sapunov, V.A.; Denisov, A.U.; Savelyev, D.V. Novel Quantum NMR Magnetometer Non-contact Defectoscopy And Monitoring Technique For The Safe Exploitation Of Gas Pipelines. Wit Trans. Ecol. Environ. 2015, 186, 649–658. [Google Scholar]
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Otegui, J.; Bahillo, A.; Lopetegi, I.; Díez, L.E. Evaluation of Experimental GNSS and 10-DOF MEMS IMU Measurements for Train Positioning. IEEE Trans. Instrum. Meas. 2018, 68, 269–279. [Google Scholar] [CrossRef]
- Huang, T.; Ye, L.; Hu, Y.; Song, K. A novel flowrate measurement method for small-diameter pipeline based on bidirectional acoustic resonance. Flow Meas. Instrum. 2019, 70, 101656. [Google Scholar] [CrossRef]
- Sahli, H. MEMS-Based Aided Inertial Navigation System for Small Diameter Pipelines. Ph.D. Thesis, University of Calgary, Calgary, AB, Canada, 2016. [Google Scholar]
- Al-Masri, W.; Abdel-Hafez, M.F.; Jaradat, M.A. Inertial Navigation System of Pipeline Inspection Gauge. IEEE Trans. Control Syst. Technol. 2018, 28, 609–616. [Google Scholar] [CrossRef]
- Yang, Y.; Li, B.; Wu, X.; Yang, L. Application of Adaptive Cubature Kalman Filter to In-Pipe Survey System for 3D Small-Diameter Pipeline Mapping. IEEE Sens. J. 2020, 20, 6331–6337. [Google Scholar] [CrossRef]
- Liu, H.; Liu, M.R.; Zhang, G.J.; Jian, Z.M.; Song, X.P.; Zhang, W.D. Study of a new scheme for MEMS vector sensor used for pipeline ground mark. Transducer Microsyst. Technol. 2013, 11, 14–17. [Google Scholar]
- Guan, L.; Cong, X.; Sun, Y.; Gao, Y.; Iqbal, U.; Noureldin, A. Enhanced MEMS SINS Aided Pipeline Surveying System by Pipeline Junction Detection in Small Diameter Pipeline. IFAC-PapersOnLine 2017, 50, 3560–3565. [Google Scholar] [CrossRef]
- Hussein, S.; Naser, E.S. A Novel Method to Enhance Pipeline Trajectory Determination Using Pipeline Junctions. Sensors 2016, 16, 567. [Google Scholar]
- Guan, L.; Gao, Y.; Noureldin, A.; Cong, X. Junction Detection Based on CCWT and MEMS Accelerometer Measurement. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Hefei, China, 18–21 May 2018. [Google Scholar]
- Zhang, H.; Zhang, S.; Liu, S.; Wang, Y. Collisional vibration of PIGs (pipeline inspection gauges) passing through girth welds in pipelines. J. Nat. Gas Ence Eng. 2017, 37, 15–28. [Google Scholar] [CrossRef]
- Mallat, S.G.; Hwang, W.L. Singularity detection and processing with wavelets. IEEE Trans. Inf. Theory 1992, 38, 617–643. [Google Scholar] [CrossRef]
- Mallat, S.; Zhong, S. Signal characterization from multiscale edges. In Proceedings of the International Conference on Pattern Recognition, Atlantic City, NJ, USA, 16–21 June 1990; pp. 891–896. [Google Scholar]
- Wang, S.Y.; Liu, X.; Yianni, J.; Aziz, T.Z.; Stein, J.F. Extracting burst and tonic components from surface electromyograms in dystonia using adaptive wavelet shrinkage. J. Neurosci. Methods 2004, 139, 177–184. [Google Scholar] [CrossRef]
- Yang, L.; Judd, M.; Bennoch, C.J. Denoising UHF signal for PD detection in transformers based on wavelet technique. In Proceedings of the Electrical Insulation and Dielectric Phenomena (CEIDP), Piscataway, NJ, USA, 12–15 October 2004. [Google Scholar]
- Xin, J.; Ma, Z.J.; Ren, W.X. Crack Detection from the Slope of the Mode Shape Using Complex Continuous Wavelet Transform. Comput.-Aided Civ. Infrastruct. Eng. 2012, 27, 187–201. [Google Scholar]
- Rahami, H.; Amiri, G.G.; Tehrani, H.A.; Akhavat, M. Structural Health Monitoring for Multi-story Shear Frames Based on Signal Processing Approach. Iran. J. Sci. Technol. Trans. Civ. Eng. 2018, 42, 287–303. [Google Scholar] [CrossRef]
- Shen, Z.; Georgy, J.; Korenberg, M.J.; Noureldin, A. FOS-based modelling of reduced inertial sensor system errors for 2D vehicular navigation. Electron. Lett. 2010, 46, 298–299. [Google Scholar] [CrossRef]
- Liu, C.W.; Li, Y.X.; Meng, L.Y.; Sun, Y.P. Time-frequency analysis of acoustic leakage signal for natural gas pipelines based on Hilbert-Huang transform. J. Vib. Shock 2014, 33, 42–49. [Google Scholar]
- Ghazali, M.F. Leak Detection Using Instantaneous Frequency Analysis. Ph.D. Thesis, University of Sheffield, Sheffield, UK, 2012. [Google Scholar]
- Huang, Y.; Zhang, Y.; Wang, X. Kalman-Filtering-Based In-Motion Coarse Alignment for Odometer-Aided SINS. IEEE Trans. Instrum. Meas. 2017, 66, 3364–3377. [Google Scholar] [CrossRef]
- Pan, J.; Zhang, C.; Zhang, X. Real-time accurate odometer velocity estimation aided by accelerometers. Measurement 2016, 91, 468–473. [Google Scholar] [CrossRef]
- Noureldin, A.; Karamat, T.B.; Georgy, J. Fundamentals of Inertial Navigation, Satellite-Based Positioning and Their Integration|Clc; Springer: Berlin/Heidelberg, Germany, 2013; pp. 125–166. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wavelet Filter | Wavelet Filter | ||
|---|---|---|---|
| db1 | 0.2957 | coif1 | 0.3636 |
| db2 | 0.4146 | coif2 | 0.3497 |
| db3 | 0.3191 | coif3 | 0.0506 |
| db4 | 0.6391 | coif4 | 0.0254 |
| db5 | 0.2169 | meyr | 0.1933 |
| db6 | 0.2946 | sym2 | 0.4146 |
| db7 | 0.3536 | sym3 | 0.2941 |
| db8 | 0.0172 | sym4 | 0.6115 |
| Haaar | 0.2957 | Mex Hat | 0.3181 |
| Different Methods | East (m) | North (m) | MSE(H/V) (m) |
|---|---|---|---|
| Distortion Position | 15.76 | 48.95 | (27.88; 11.41) |
| SINS/DR | 3.73 | 8.58 | (5.27; 2.81) |
| SINS/DR/PJ | 3.01 | 6.89 | (4.92; 2.68) |
| SINS/DR/CP | 2.64 | 5.82 | (4.49; 2.31) |
| Gyroscope | Zero Bias (°/s) | Scale Factor | Installation Error () | |
|---|---|---|---|---|
| x-axis | 0.0987 | 0.9875 | 198.231 | 256.325 |
| y-axis | 0.0996 | 1.0125 | 196.258 | 100.157 |
| z-axis | 0.1012 | 1.0079 | 299.345 | 100.108 |
| Accelerometer | Zero Bias (m/s) | Scale Factor | Installation Error () | |
| x-axis | 0.0895 | 0.8920 | 200.211 | 298.125 |
| y-axis | 0.1010 | 1.0052 | 199.435 | 100.156 |
| z-axis | 0.1123 | 0.9784 | 297.568 | 100.025 |
| Different Methods | Horizontal Error (m) | Vertical Error (m) | Positioning Error | MSE(East; North; Up) (m) |
|---|---|---|---|---|
| Distortion Position | 0.762 | 1.182 | 0.571% | (45.1; 10.51; 144.5) |
| SINS/DR | 0.651 | 0.511 | 0.276% | (16.6; 6.5; 21.3) |
| SINS/DR/ACKF | 0.492 | 0.680 | 0.268% | (20.1; 8.2; 30.3) |
| SINS/DR/PJ | 0.421 | 0.338 | 0.178% | (12.3; 6.4; 12.9) |
| SINS/DR/CP | 0.306 | 0.243 | 0.129% | (7.8; 5.6; 7.0) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Z.; Wang, G.; Wang, Z.; Zhao, H.; Gao, W. Application of Weld Scar Recognition in Small-Diameter Transportation Pipeline Positioning System. Electronics 2022, 11, 1100. https://doi.org/10.3390/electronics11071100
Lv Z, Wang G, Wang Z, Zhao H, Gao W. Application of Weld Scar Recognition in Small-Diameter Transportation Pipeline Positioning System. Electronics. 2022; 11(7):1100. https://doi.org/10.3390/electronics11071100
Chicago/Turabian StyleLv, Zhen, Guochen Wang, Zicheng Wang, Huachuan Zhao, and Wei Gao. 2022. "Application of Weld Scar Recognition in Small-Diameter Transportation Pipeline Positioning System" Electronics 11, no. 7: 1100. https://doi.org/10.3390/electronics11071100
APA StyleLv, Z., Wang, G., Wang, Z., Zhao, H., & Gao, W. (2022). Application of Weld Scar Recognition in Small-Diameter Transportation Pipeline Positioning System. Electronics, 11(7), 1100. https://doi.org/10.3390/electronics11071100