
Intelligent Design of Multi-Machine Power System Stabilizers (PSSs) Using Improved Particle Swarm Optimization

 , ,
, ,
Abstract
:1. Introduction
- Proposed online optimized PSS for power system oscillation mitigation;
- A modified PSO algorithm is presented for performing optimization;
- An innovative objective function is proposed.
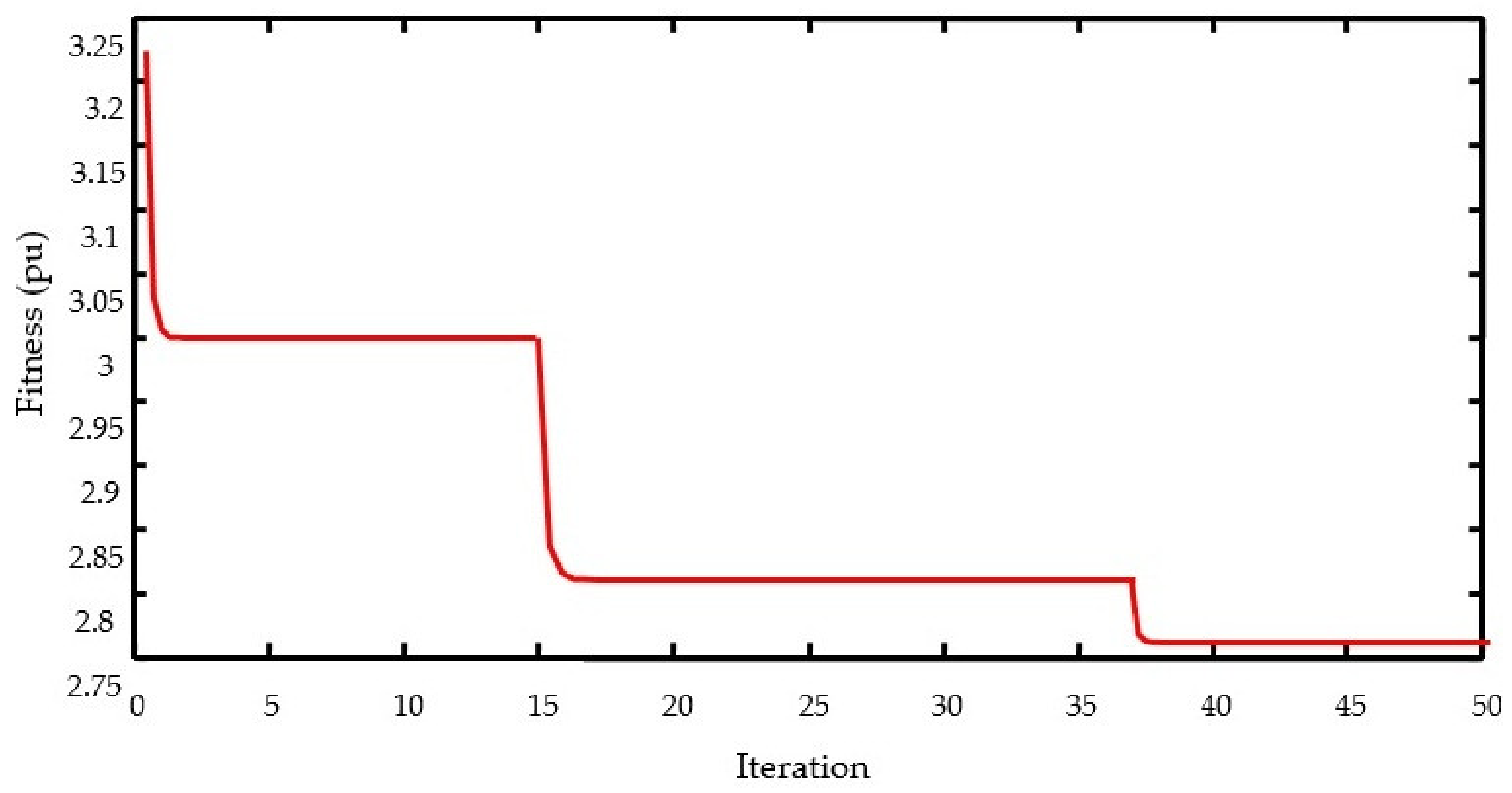
2. The Proposed PSO Algorithm
3. Power System Stabilizer
4. Proposed Objective Function and Constraints
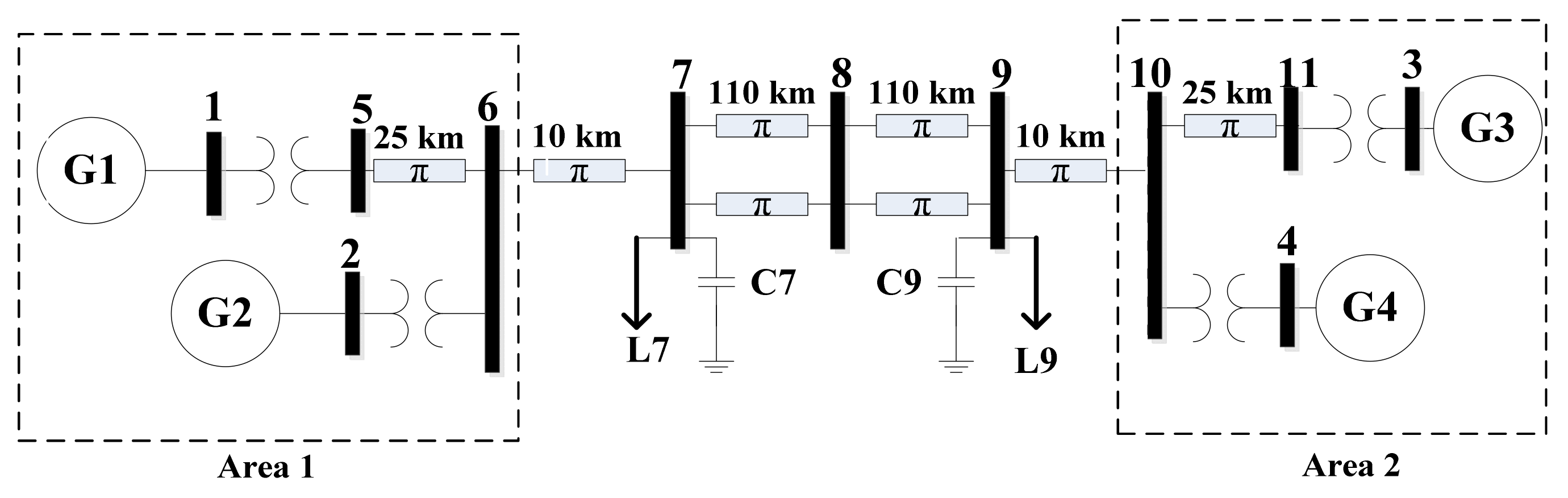
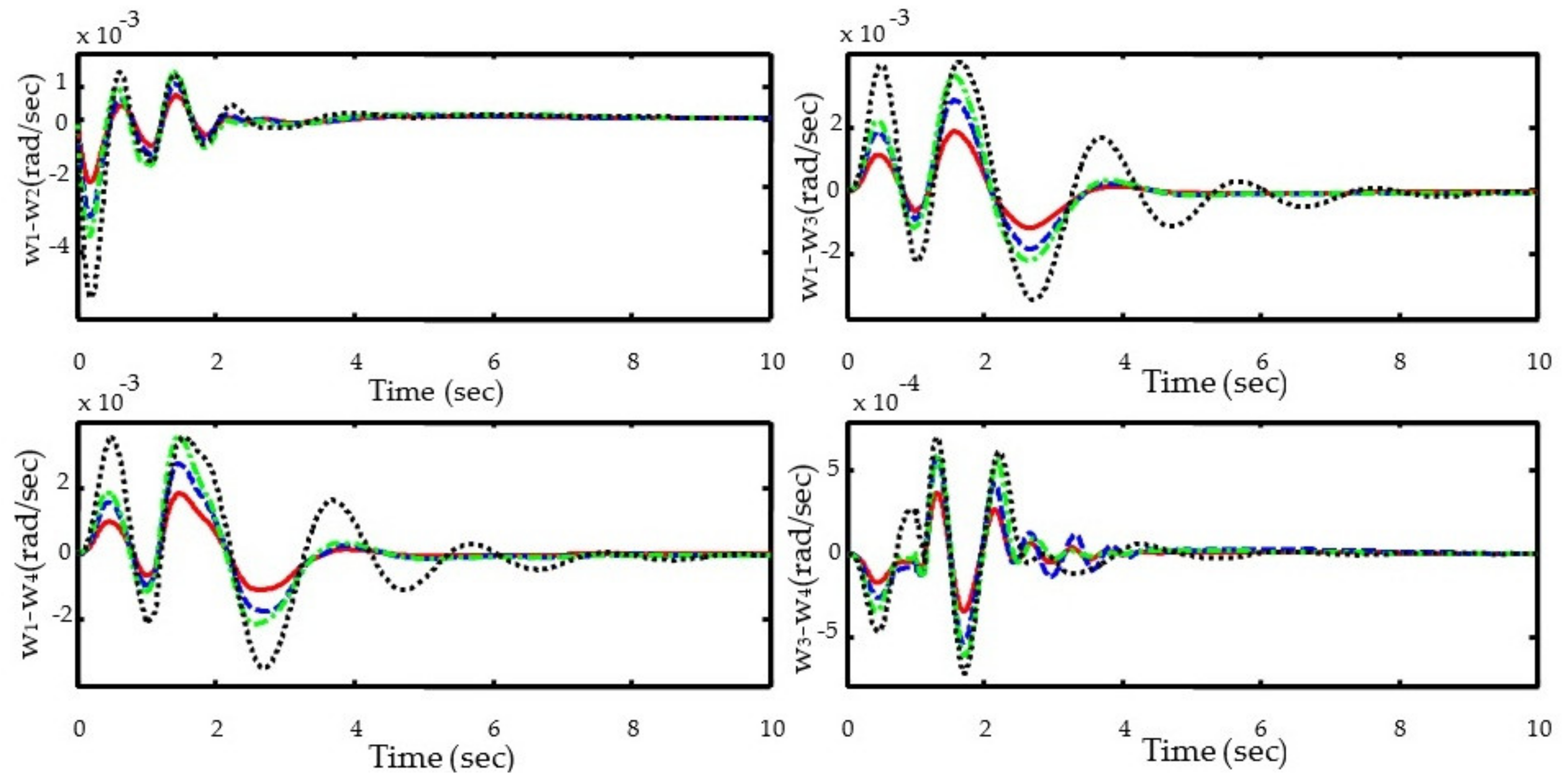
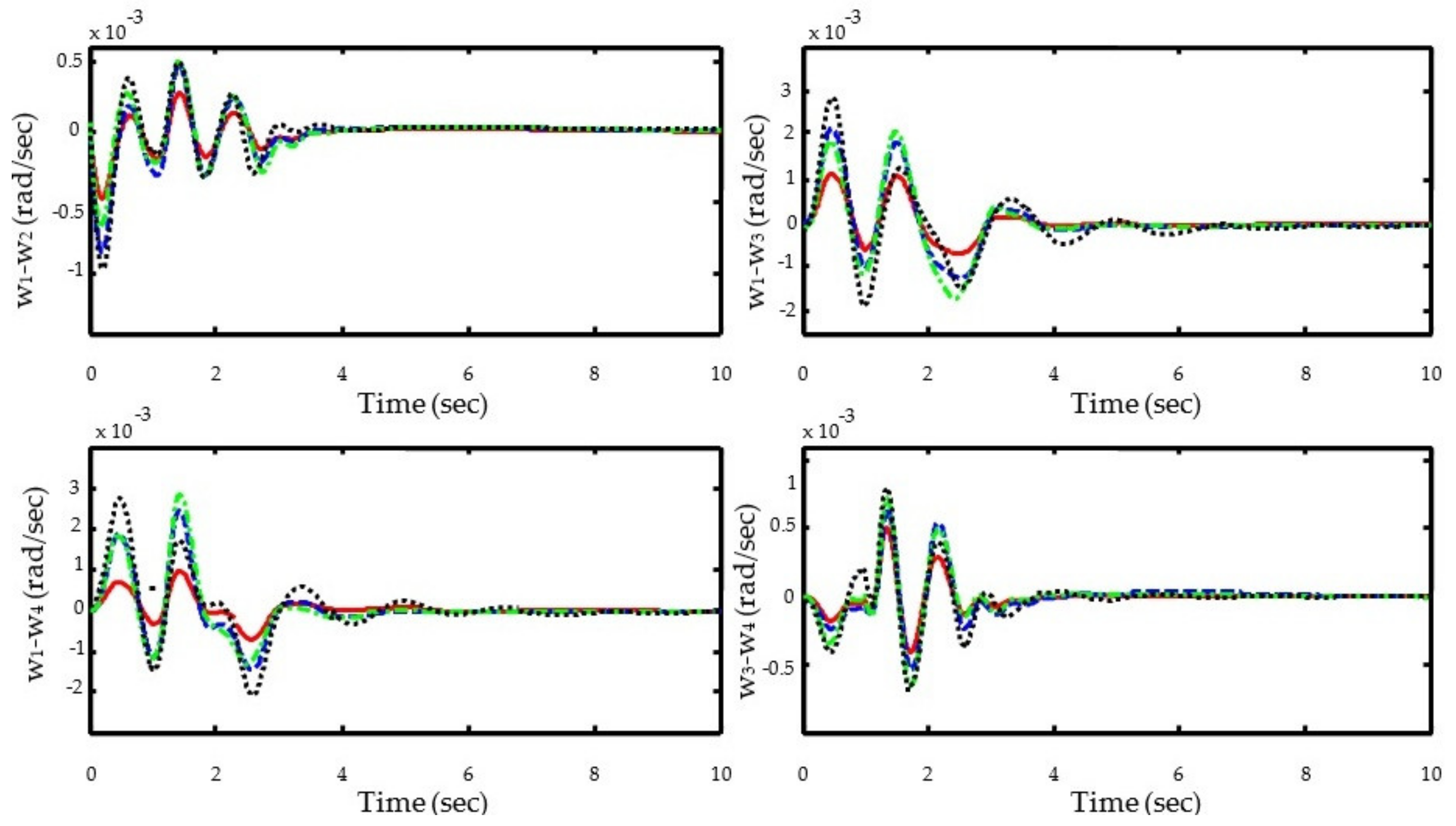
5. Simulation and Analysis of the Results
- The system with rated loading;
- The system under heavy loading (20% increase in the rated value);
- The system under low loading (20% decrease in the rated value).
- Scenario 1
- Scenario 2
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shokouhandeh, H.; Jazaeri, M. An enhanced and auto-tuned power system stabilizer based on optimized interval type-2 fuzzy PID scheme. Int. Trans. Electr. Energy Syst. 2017, 28, e2469. [Google Scholar] [CrossRef]
- Sreedivya, K.M.; Jeyanthy, P.A.; Devaraj, D. improved design of interval type-2 fuzzy based wide area power system stabilizer for inter-area oscillation damping. Microprocess. Microsyst. 2021, 83, 103957. [Google Scholar] [CrossRef]
- Nakhi, P.R.; Kamarposhti, M.A. Multi objective design of type II fuzzy based power system stabilizer for power system with wind farm turbine considering uncertainty. Int. Trans. Electr. Energy Syst. 2019, 30, 12285. [Google Scholar] [CrossRef]
- Shokouhandeh, H.; Jazaeri, M. Robust design of fuzzy-based power system stabiliser considering uncertainties of loading conditions and transmission line parameters. IET Gener. Transm. Distrib. 2019, 13, 4287–4300. [Google Scholar] [CrossRef]
- Devarapalli, R.; Bhattacharyya, B. Optimal controller parameter tuning of PSS using sine-cosine algorithm. In Metaheuristic and Evolutionary Computation: Algorithms and Applications; Springer: Singapore, 2021; pp. 337–360. [Google Scholar]
- Razmjooy, N.; Razmjooy, S.; Vahedi, Z.; Estrela, V.V.; de Oliveira, G.G. A new design for robust control of power system stabilizer based on Moth search algorithm. In Metaheuristics and Optimization in Computer and Electrical Engineering; Springer: Cham, Switzerland, 2021; pp. 187–202. [Google Scholar]
- Butti, D.; Mangipudi, S.K.; Rayapudi, S.R. An improved whale optimization algorithm for the design of multi-machine power system stabilizer. Int. Trans. Electr. Energy Syst. 2020, 30, 12314. [Google Scholar] [CrossRef]
- Butti, D.; Mangipudi, S.K.; Rayapudi, S. Model order reduction based power system stabilizer design using improved whale optimization algorithm. IETE J. Res. 2021, 1–20. [Google Scholar] [CrossRef]
- Izci, D. A novel improved atom search optimization algorithm for designing power system stabilizer. Evol. Intell. 2021, 314, 1–15. [Google Scholar] [CrossRef]
- Hauser, D.; Taranto, G.N. Analysis of Interarea Modes of the Brazilian Power System Using the Dominant Pole Spectrum Eigensolver Algorithm. J. Control. Autom. Electr. Syst. 2022, 31, 1–8. [Google Scholar] [CrossRef]
- Eslami, M.; Neshat, M.; Khalid, S.A. A Novel Hybrid Sine Cosine Algorithm and Pattern Search for Optimal Coordination of Power System Damping Controllers. Sustainability 2022, 14, 541. [Google Scholar] [CrossRef]
- Alshammari, F.A.; Guesmi, T.; Alzamil, A.A.; Alshammari, B.M.; Alshammari, A.S. Local Search-based Non-dominated Sorting Genetic Algorithm for Optimal Design of Multimachine Power System Stabilizers. Eng. Technol. Appl. Sci. Res. 2021, 11, 7283–7289. [Google Scholar] [CrossRef]
- Sabo, A.; Wahab, N.I.A.; Othman, M.L.; Jaffar, M.Z.A.M.; Beiranvand, H. Optimal design of power system stabilizer for multimachine power system using farmland fertility algorithm. Int. Trans. Electr. Energy Syst. 2020, 30, 12657. [Google Scholar] [CrossRef]
- Naghshbandy, A.H.; Faraji, A. Coordinated design of PSS and unified power flow controller using the combination of CWT and Prony methods with the help of BFA II multi-objective optimisation algorithm. IET Gener. Transm. Distrib. 2019, 13, 4900–4909. [Google Scholar] [CrossRef]
- Devarapalli, R.; Bhattacharyya, B.; Sinha, N.K.; Dey, B. Amended GWO approach based multi-machine power system stability enhancement. ISA Trans. 2021, 109, 152–174. [Google Scholar] [CrossRef] [PubMed]
- Chaib, L.; Choucha, A.; Arif, S.; Zaini, H.G.; El-Fergany, A.; Ghoneim, S.S.M. Robust Design of Power System Stabilizers Using Improved Harris Hawk Optimizer for Interconnected Power System. Sustainability 2021, 13, 11776. [Google Scholar] [CrossRef]
- De Marco, F.; Rullo, P. Damped Nyquist Plot for the Phase and Gain Optimization of Power System Stabilizers. Electr. Power Syst. Res. 2021, 205, 107708. [Google Scholar] [CrossRef]
- Rashwan, A.F.; Ahmed, M.; Mossa, M.R.; Baha-El-Din, A.M.; Alkhalaf, S.; Senjyu, T.; Hemeida, A.M. Explicit adaptive power system stabilizer design based an on-line identifier for single-machine infinite bus. Ain Shams Eng. J. 2021, 13, 101544. [Google Scholar] [CrossRef]
- Yang, S.; Xiong, L.; Huang, S.; He, Y.; Li, P.; He, D.; Wang, J. Optimal node selection of damping controller for power systems with high wind power penetration. Int. J. Electr. Power Energy Syst. 2021, 136, 107716. [Google Scholar] [CrossRef]
- Mujeer, S.A.; Jayaraman, R.; Krishna, P.S.; Kollati, S.; Nayak, M.R. FOPID and state space analysis based PSS for damping of oscillation in multi machine system. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Rodrigues, F.; Molina, Y.; Silva, C.; Ñaupari, Z. Simultaneous tuning of the AVR and PSS parameters using particle swarm optimization with oscillating exponential decay. Int. J. Electr. Power Energy Syst. 2021, 133, 107215. [Google Scholar] [CrossRef]
- Xu, L.; Cao, M.; Song, B. A new approach to smooth path planning of mobile robot based on quartic Bezier transition curve and improved PSO algorithm. Neurocomputing 2021, 473, 98–106. [Google Scholar] [CrossRef]
- Devarapalli, R.; Sinha, N.K.; Márquez, F.P.G. A Review on the Computational Methods of Power System Stabilizer for Damping Power Network Oscillations. Arch. Comput. Methods Eng. 2022, 144, 1–27. [Google Scholar] [CrossRef]
- Alotaibi, I.M.; Ibrir, S.; Abido, M.A.; Khalid, M. Nonlinear Power System Stabilizer Design for Small Signal Stability Enhancement. Arab. J. Sci. Eng. 2022, 46, 1–13. [Google Scholar] [CrossRef]
- Aribowo, W.; Muslim, S.; Suprianto, B.; Haryudo, S.I. Tunicate Swarm Algorithm-Neural Network for Adaptive Power System Stabilizer Parameter. Sci. Technol. Asia 2021, 26, 50–63. [Google Scholar]
- Su, X.-L.; Yang, Y.-Q.; Bai, W.-R.; Chen, C. Damping analysis of power system stabilizer based on transient equivalent circuit. J. Vib. Test. Syst. Dyn. 2022, 6, 53–61. [Google Scholar] [CrossRef]
- Lv, Z.; Guo, J.; Lv, H. Safety Poka Yoke in Zero-Defect Manufacturing Based on Digital Twins. IEEE Trans. Ind. Inform. 2022. Available online: https://ieeexplore.ieee.org/abstract/document/9669046 (accessed on 4 January 2022). [CrossRef]
- Mi, C.; Chen, J.; Zhang, Z.; Huang, S.; Postolache, O. Visual Sensor Network Task Scheduling Algorithm at Automated Container Terminal. IEEE Sens. J. 2022, 22, 6042–6051. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, T.; Cai, G.; Hai, K.L. Research on electric vehicle charging safety warning model based on back propagation neural network optimized by improved gray wolf algorithm. J. Energy Storage 2022, 49, 104092. [Google Scholar] [CrossRef]
- Fang, Z.; Lu, J.; Liu, F.; Xuan, J.; Zhang, G. Open Set Domain Adaptation: Theoretical Bound and Algorithm. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4309–4322. [Google Scholar] [CrossRef]
- Meng, F.; Cheng, W.; Wang, J. Semi-supervised Software Defect Prediction Model Based on Tri-training. KSII Trans. Internet Inf. Syst. 2021, 15, 4028–4042. [Google Scholar] [CrossRef]
- Liu, S.; Liu, C.; Song, Z.; Dong, Z.; Huang, Y. Candidate Modulation Patterns Solution for Five-Phase PMSM Drive System. IEEE Trans. Transp. Electrif. 2021. Available online: https://ieeexplore.ieee.org/abstract/document/9514518 (accessed on 16 August 2021). [CrossRef]
- Liu, S.; Liu, C.; Huang, Y.; Xiao, Y. Direct Modulation Pattern Control for Dual Three-Phase PMSM Drive System. IEEE Trans. Ind. Electron. 2021, 69, 110–120. [Google Scholar] [CrossRef]
- Sui, T.; Marelli, D.; Sun, X.; Fu, M. Multi-sensor state estimation over lossy channels using coded measurements. Automatica 2020, 111, 108561. [Google Scholar] [CrossRef]
- Zhou, H.; Xu, C.; Lu, C.; Jiang, X.; Zhang, Z.; Wang, J.; Xiao, X.; Xin, M.; Wang, L. Investigation of transient magnetoelectric response of magnetostrictive/piezoelectric composite applicable for lightning current sensing. Sens. Actuators A Phys. 2021, 329, 112789. [Google Scholar] [CrossRef]
- Liu, X.; Zheng, W.; Mou, Y.; Li, Y.; Yin, L. Microscopic 3D reconstruction based on point cloud data generated using defocused images. Meas. Control 2021, 54, 1309–1318. [Google Scholar] [CrossRef]
- Ma, Z.; Zheng, W.; Chen, X.; Yin, L. Joint embedding VQA model based on dynamic word vector. PeerJ Comput. Sci. 2021, 7, e353. [Google Scholar] [CrossRef]
- Wang, Y.; Zou, R.; Liu, F.; Zhang, L.; Liu, Q. A review of wind speed and wind power forecasting with deep neural networks. Appl. Energy 2021, 304, 117766. [Google Scholar] [CrossRef]
- Guo, L.; Ye, C.; Ding, Y.; Wang, P. Allocation of Centrally Switched Fault Current Limiters Enabled by 5G in Transmission System. IEEE Trans. Power Deliv. 2021, 36, 3231–3241. [Google Scholar] [CrossRef]
- Guo, C.; Ye, C.; Ding, Y.; Wang, P. A Multi-State Model for Transmission System Resilience Enhancement Against Short-Circuit Faults Caused by Extreme Weather Events. IEEE Trans. Power Deliv. 2020, 36, 2374–2385. [Google Scholar] [CrossRef]
- Yang, Y.; Peng, J.C.-H.; Ye, C.; Ye, Z.-S.; Ding, Y. A Criterion and Stochastic Unit Commitment towards Frequency Resilience of Power Systems. IEEE Trans. Power Syst. 2021, 37, 640–652. [Google Scholar] [CrossRef]
- Purba, S.R.P.; Amarilies, H.S.; Rachmawati, N.L.; Redi, A.A.N.P. Implementation of Particle Swarm Optimization Algorithm in Cross-Docking Distribution Problem. Acta Inform. Malays. 2021, 5, 16–20. [Google Scholar]
- Wang, G.; Hu, Y. Intelligent Control Algorithm of Impulse Current for Two Stage Wide Input Marine Switching Power Supply. J. Coast. Res. 2020, 103, 956. [Google Scholar] [CrossRef]
- Dasu, B.; Sivakumar, M.; Srinivasarao, R. Interconnected multi-machine power system stabilizer design using whale optimization algorithm. Prot. Control Mod. Power Syst. 2019, 4, 2. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C1f | 0.2 | wmin | 0.4 |
| C1i | 2.5 | wmax | 0.9 |
| C2f | 2.5 | population | 20 |
| C2i | 0.2 | iteration | 50 |
| φ | 4.1 | ||
| Kpss | T1 | T2 | T3 | T4 | |
|---|---|---|---|---|---|
| Min value | 1 | 0 | 0 | 0 | 0 |
| Max value | 100 | 2 | 2 | 10 | 10 |
| Method | Num—Gen | Kpss | T1 | T2 | T3 | T4 |
|---|---|---|---|---|---|---|
| CPSS | G1 | 20.00 | 0.05 | 0.02 | 3.00 | 5.40 |
| G2 | 20.00 | 0.05 | 0.02 | 3.00 | 5.40 | |
| G3 | 20.00 | 0.05 | 0.02 | 3.00 | 5.40 | |
| G4 | 20.00 | 0.05 | 0.02 | 3.00 | 5.40 | |
| BFA | G1 | 23.84 | 2.00 | 1.00 | 6.16 | 8.25 |
| G2 | 21.48 | 2.00 | 1.00 | 4.93 | 8.19 | |
| G3 | 18.22 | 2.00 | 1.00 | 4.87 | 7.24 | |
| G4 | 20.71 | 2.00 | 1.00 | 4.74 | 8.92 | |
| GA | G1 | 20.16 | 2.22 | 1.21 | 6.16 | 8.12 |
| G2 | 21.61 | 2.00 | 1.20 | 2.98 | 6.21 | |
| G3 | 19.54 | 2.01 | 0.98 | 4.21 | 6.16 | |
| G4 | 17.81 | 2.00 | 0.89 | 4.12 | 7.15 | |
| Proposed | G1 | 21.22 | 2.12 | 1.15 | 6.23 | 7.32 |
| G2 | 20.76 | 1.78 | 1.00 | 3.12 | 6.32 | |
| G3 | 19.09 | 1.99 | 0.96 | 4.43 | 6.37 | |
| G4 | 18.54 | 2.22 | 0.95 | 4.13 | 7.65 |
| Algorithm | Scenario | Compare Index | |||
|---|---|---|---|---|---|
| ITAE | FD | IAE | ISE | ||
| Propose | Base Case | 17.891 | 13.874 | 7.2581 | 1.5951 |
| 20% increase | 19.726 | 20.398 | 8.9785 | 2.8192 | |
| 20% decrease | 28.726 | 26.254 | 10.267 | 3.2651 | |
| 2 line tripe | 17.984 | 17.221 | 7.6275 | 1.6276 | |
| GA | Base Case | 24.942 | 36.276 | 12.423 | 2.3995 |
| 20% increase | 23.817 | 22.245 | 9.8981 | 3.0291 | |
| 20% decrease | 31.029 | 28.929 | 11.927 | 4.1783 | |
| 2 line tripe | 18.782 | 20.254 | 8.4245 | 1.8728 | |
| BFA | Base Case | 36.342 | 41.892 | 15.498 | 3.3954 |
| 20% increase | 39.288 | 29.425 | 13.287 | 4.9281 | |
| 20% decrease | 40.245 | 34.189 | 16.209 | 6.1552 | |
| 2 line tripe | 22.177 | 23.928 | 10.002 | 2.3091 | |
| CPSS | Base Case | 61.029 | 106.27 | 37.287 | 9.7363 |
| 20% increase | 69.267 | 145.28 | 48.278 | 15.039 | |
| 20% decrease | 79.266 | 100.93 | 57.245 | 20.516 | |
| 2 line tripe | 62.287 | 138.27 | 40.398 | 10.454 | |
| Operating Condition | G1 | G2 | G3 | G4 | ||||
|---|---|---|---|---|---|---|---|---|
| P | Q | P | Q | P | Q | P | Q | |
| Base Case | 0.7778 | 0.1021 | 0.7777 | 0.1308 | 0.7879 | 0.0913 | 0.7778 | 0.0918 |
| 20% increase for load | 1.084 | 0.3310 | 0.7778 | 0.4492 | 0.7879 | 0.1561 | 0.7778 | 0.2501 |
| 20% decrease for load | 0.7778 | 0.0502 | 0.2333 | 0.0371 | 0.7989 | 0.0794 | 0.7778 | 0.0704 |
| trip 2 line | 0.7778 | 0.1021 | 0.7777 | 0.1308 | 0.7989 | 0.0903 | 0.7778 | 0.0981 |
| Methods | Kpss | T1 | T2 | T3 | T4 | VSMax | |
|---|---|---|---|---|---|---|---|
| Propose | G2 | 41 | 0.001 | 0.002 | 8.4 | 11.8 | 0.36 |
| G4 | 40 | 0.002 | 0.002 | 9.1 | 12.6 | 0.37 | |
| BFA | G1 | 45 | 0.26 | 0.01 | 4.2 | 10 | 0.33 |
| G4 | 45 | 0.26 | 0.01 | 4.2 | 10 | 0.33 | |
| GA | G1 | 100 | 0.52 | 0.04 | 0.65 | 5.8 | 0.31 |
| G4 | 100 | 0.52 | 0.04 | 0.65 | 5.8 | 0.31 | |
| Methods | G1 | G2 | G3 | G4 | |
|---|---|---|---|---|---|
| Propose | %Peak overshoot | 501.65 | 676.75 | 1344.60 | 2252.91 |
| Settling time (s) | 1.6267 | 1.4812 | 3.8947 | 2.7110 | |
| BFA | %Peak overshoot | 553.30 | 687.71 | 1471.92 | 2405.92 |
| Settling time (s) | 1.8019 | 1.6418 | 4.0428 | 2.7992 | |
| GA | %Peak overshoot | 527.29 | 701.76 | 1415.68 | 2355.68 |
| Settling time (s) | 1.7497 | 1.5964 | 3.9155 | 2.8752 | |
| WOA [44] | %Peak overshoot | 518.55 | 680.21 | 1379.5 | 2278.3 |
| Settling time (s) | 1.6879 | 1.5374 | 3.9100 | 2.7717 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Latif, S.; Irshad, S.; Ahmadi Kamarposhti, M.; Shokouhandeh, H.; Colak, I.; Eguchi, K. Intelligent Design of Multi-Machine Power System Stabilizers (PSSs) Using Improved Particle Swarm Optimization. Electronics 2022, 11, 946. https://doi.org/10.3390/electronics11060946
Latif S, Irshad S, Ahmadi Kamarposhti M, Shokouhandeh H, Colak I, Eguchi K. Intelligent Design of Multi-Machine Power System Stabilizers (PSSs) Using Improved Particle Swarm Optimization. Electronics. 2022; 11(6):946. https://doi.org/10.3390/electronics11060946
Chicago/Turabian StyleLatif, Sohaib, Sadaf Irshad, Mehrdad Ahmadi Kamarposhti, Hassan Shokouhandeh, Ilhami Colak, and Kei Eguchi. 2022. "Intelligent Design of Multi-Machine Power System Stabilizers (PSSs) Using Improved Particle Swarm Optimization" Electronics 11, no. 6: 946. https://doi.org/10.3390/electronics11060946
APA StyleLatif, S., Irshad, S., Ahmadi Kamarposhti, M., Shokouhandeh, H., Colak, I., & Eguchi, K. (2022). Intelligent Design of Multi-Machine Power System Stabilizers (PSSs) Using Improved Particle Swarm Optimization. Electronics, 11(6), 946. https://doi.org/10.3390/electronics11060946