
Coverage Optimization of Wireless Sensor Networks Using Combinations of PSO and Chaos Optimization

Abstract
:1. Introduction
2. Model of Wireless Sensor Networks
3. Combined Using of PSO and VDCOA for WSNs Coverage Optimization
3.1. Overview of Particle Swarm Optimization
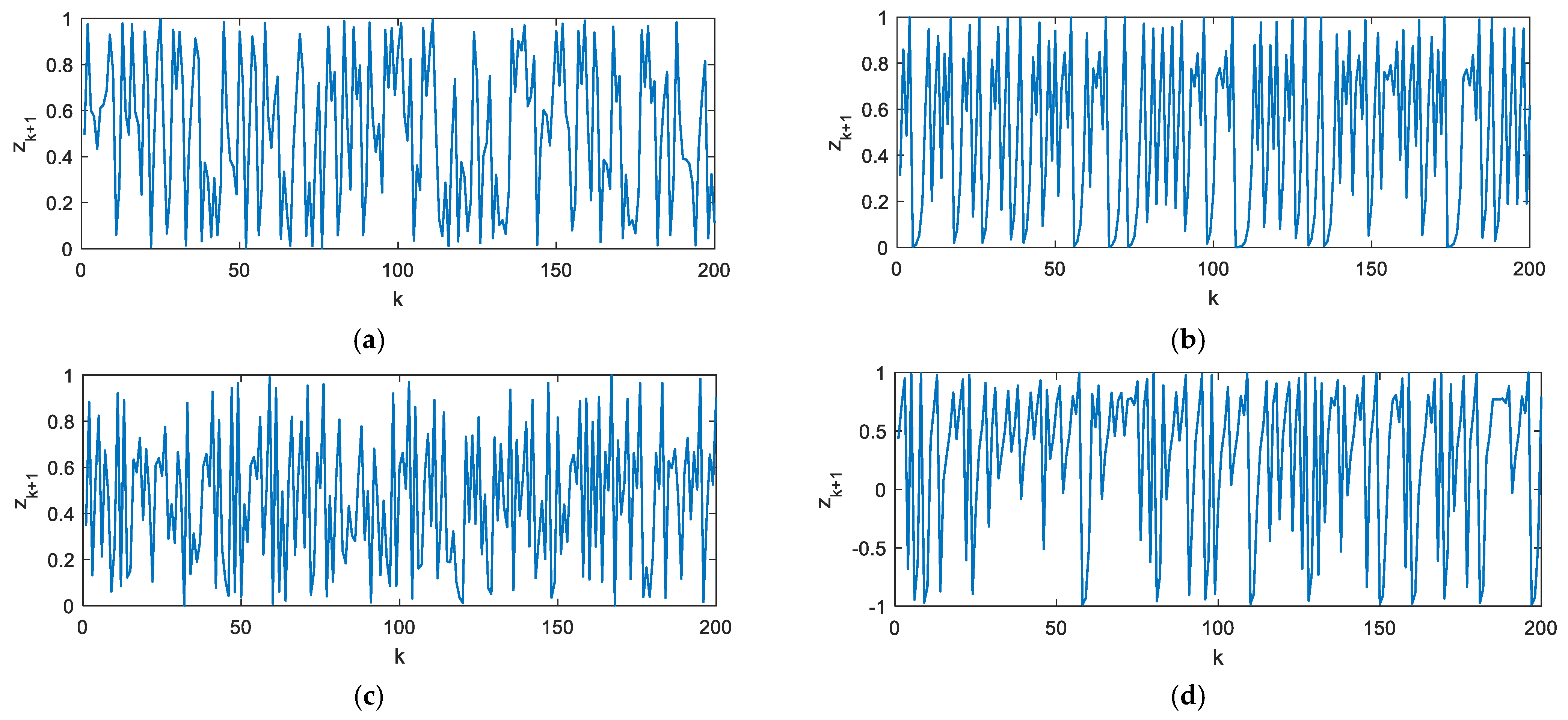
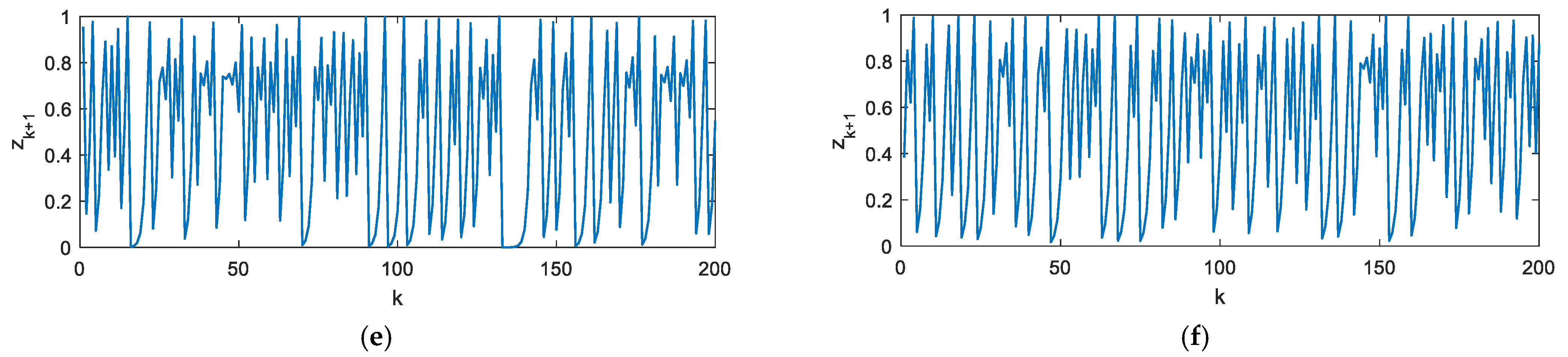
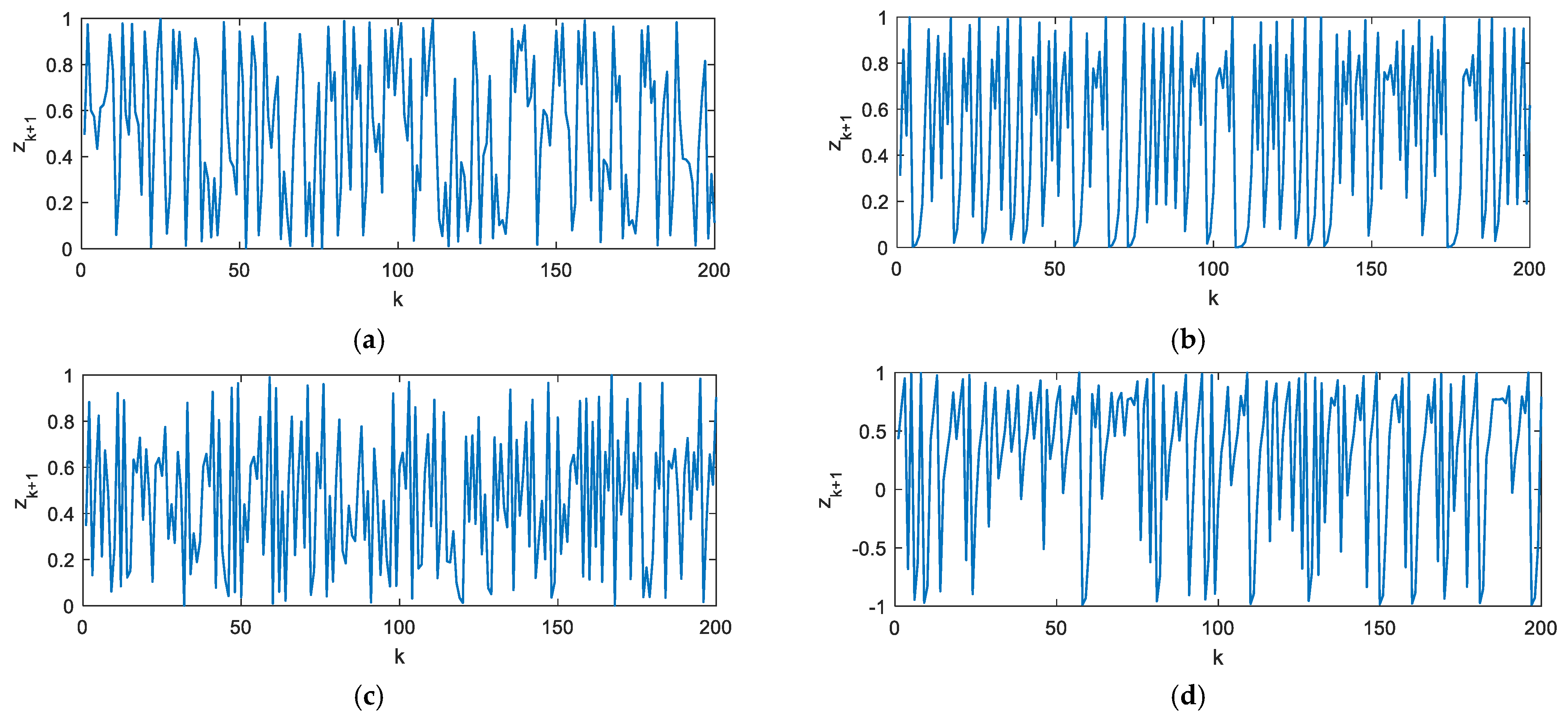
3.2. Overview of Chaos Optimization
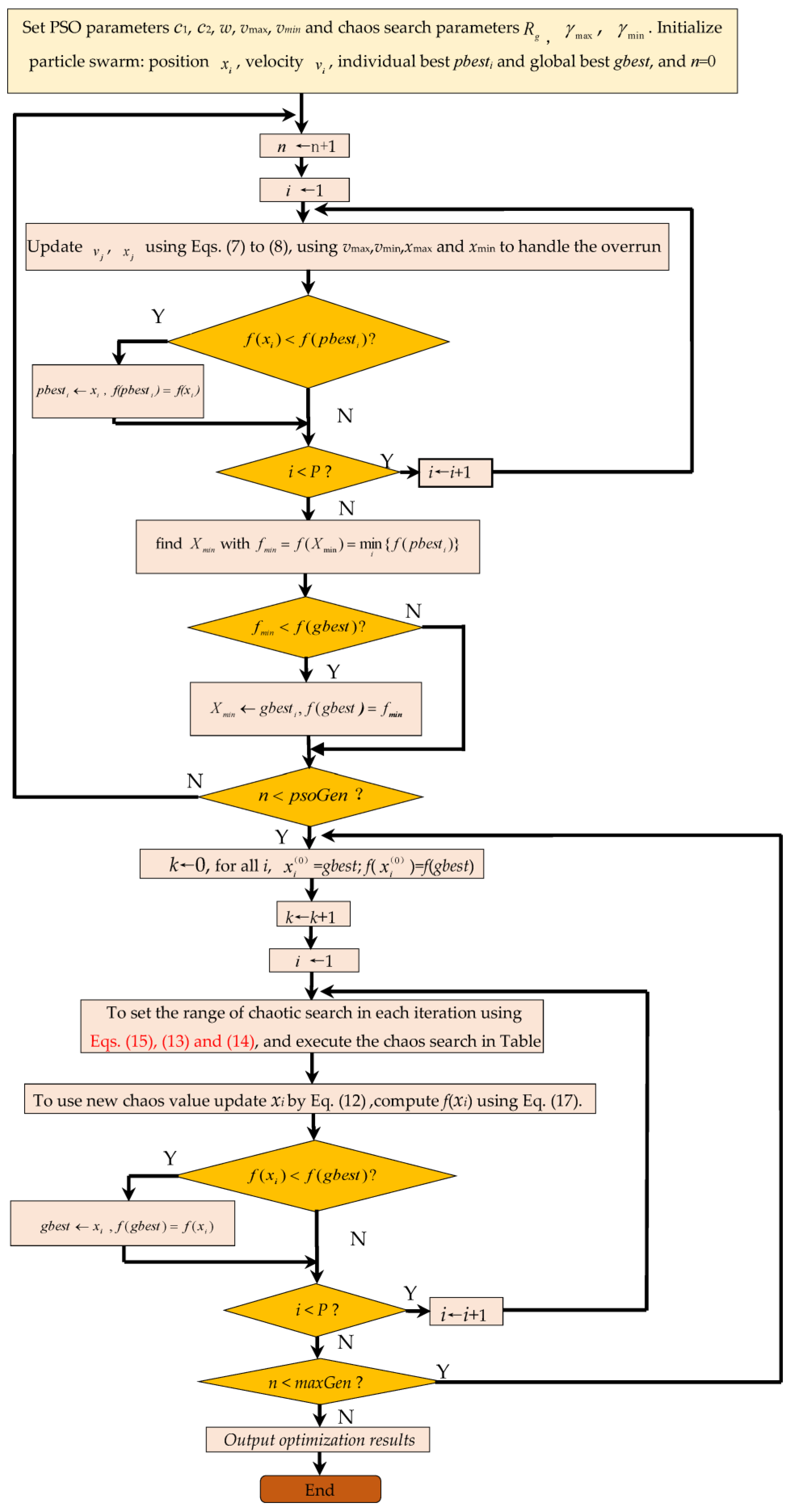
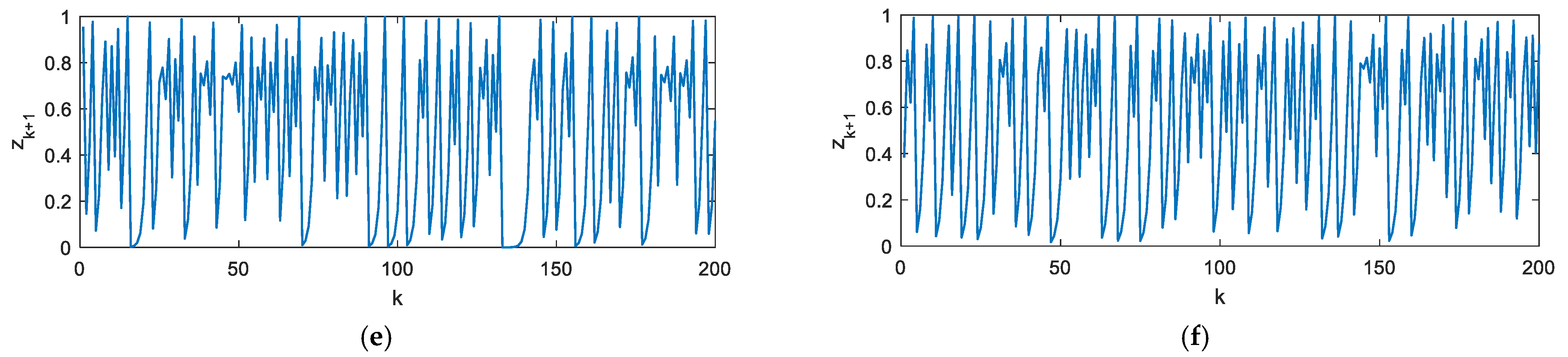
3.3. The Combined Method of PSO and VDCOA (PSO-VDCOA)
3.4. Wireless Sensor Networks Coverage Optimization Using PSO-VDCOA
- (1)
- Initialize particle swarm: randomly generate N particles: with velocities .
- (2)
- Evaluate the fitness of each particle using the objective function in Equation (17).
- (3)
- Update individual and global best value: if , . Search {} for the optimal with minimum fmin, and if , let .
- (4)
- Update particle velocity by Equation (7).
- (5)
- Update particle position by Equation (8).
- (6)
- Repeat Steps (2) to (5) until a given maximum number of iterations are achieved.
- (7)
- Chaos initializing: let denote the iterating counter, and set = 0. Select different random values for chaotic variable from (0, 1) (except for values of 0.25, 0.5 and 0.75 for logistic map).
- (8)
- Update according to Equation (15).
- (9)
- Set the region range of chaotic search based on the optimal point gbest.
- (10)
- Chaos iteration: Using certain chaotic map equation in Table 1.
- (11)
- Map the chaotic variable into the search space of design variable using Equation (12).
- (12)
- Search in the {} for the optimal with minimum fmin, and if , let .
- (13)
- Repeat steps (8)–(12), until the total number of iteration generations is achieved.
| Algorithm 1. Matrix-version of PSO-VDCOA. |
| Set parameters: dimension dS, swarm size pS, coefficients c1, c2, inertia weight w, total iteration generations maxGen, PSO iteration generations psoGen; position limit: xmax and xmin; velocity limit: vmax and vmin, Rg, γmax, γmin. Let k = 0. Initialize swarm: x = xmin + rand(pS, dS).*(xmax − xmin); Compute the fitness: FF = f(x); Pbest = x; fPbest = FF, fmin = min(fPbest), gbest = xmin, (xmin corresponding to fmin). Gbest = [gbest; gbest, …, gbest]T. //totally pS rows for iter = 1 to maxGen do  |
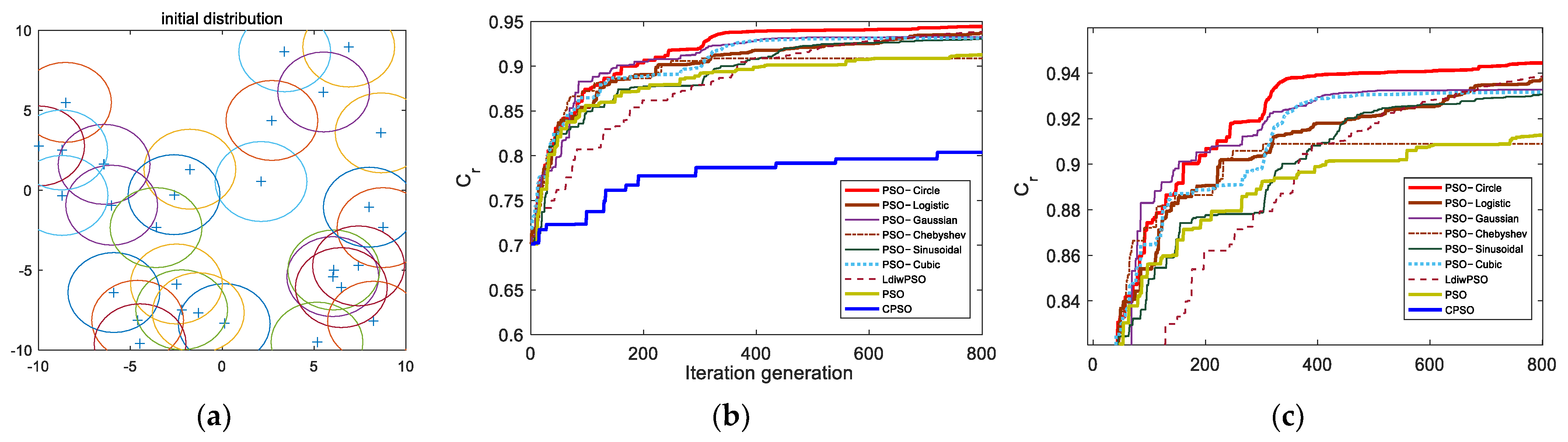
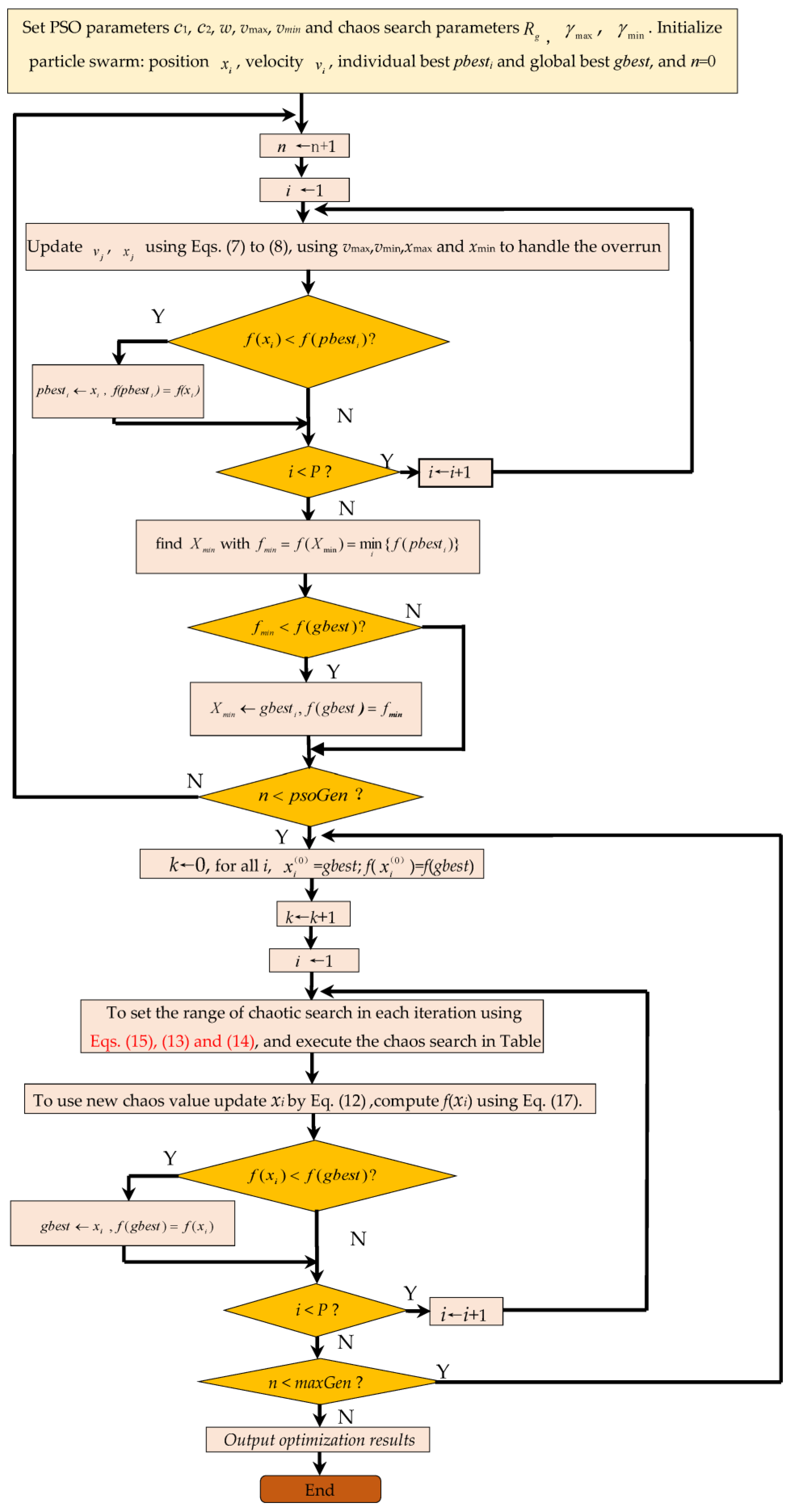
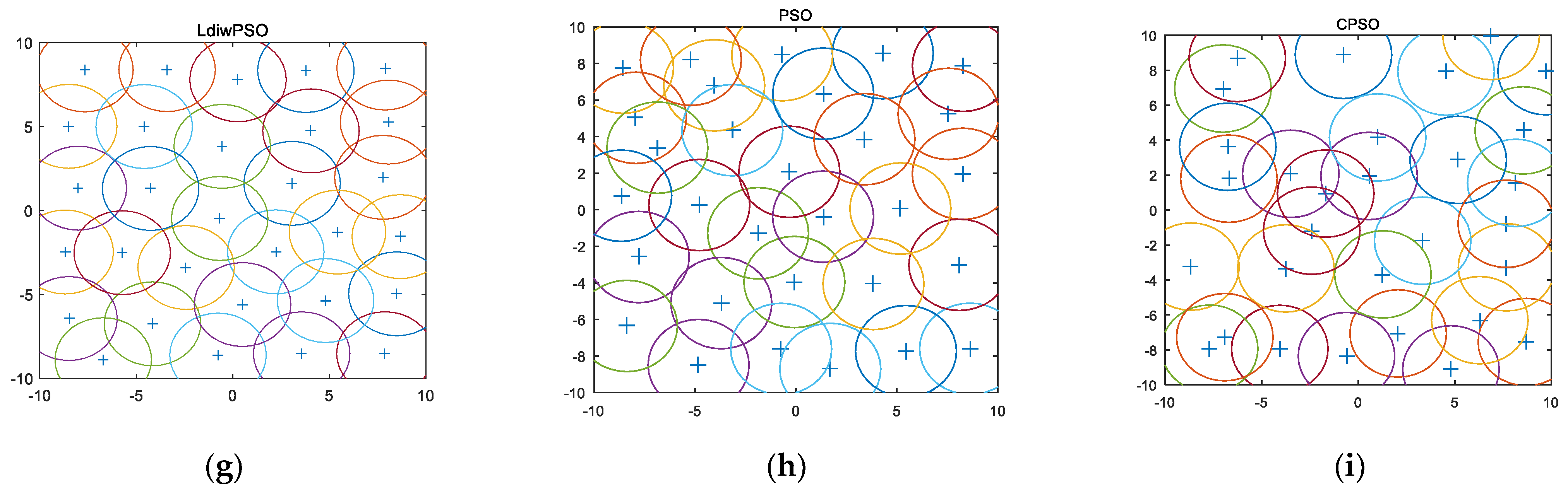
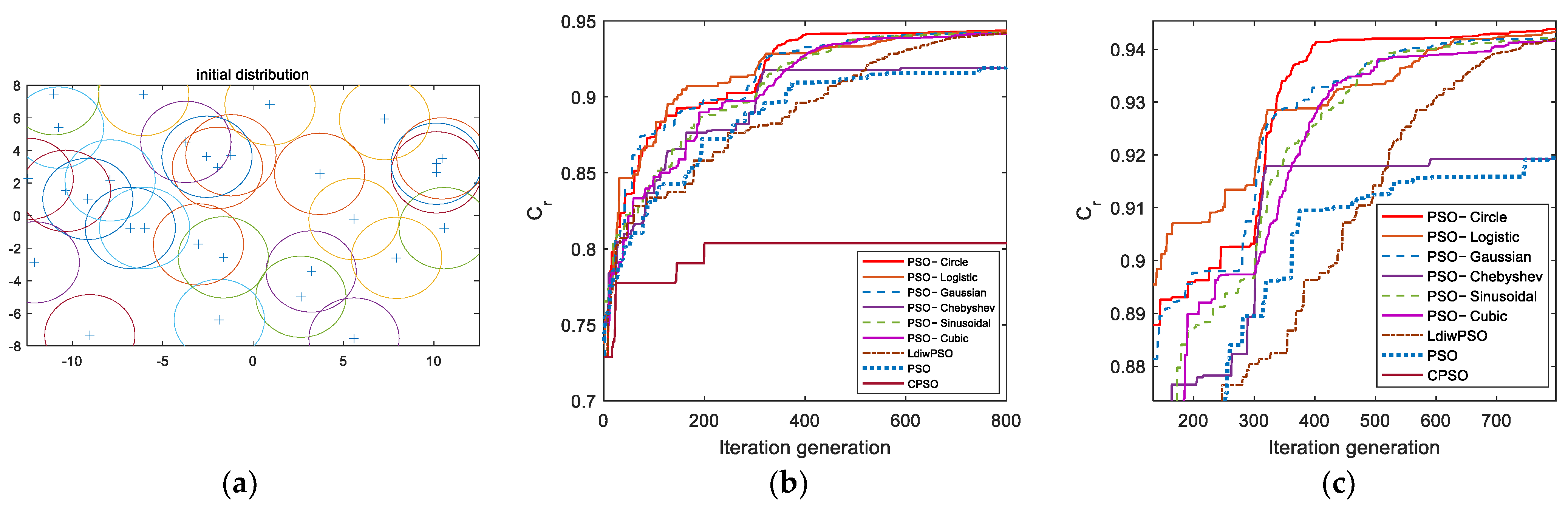
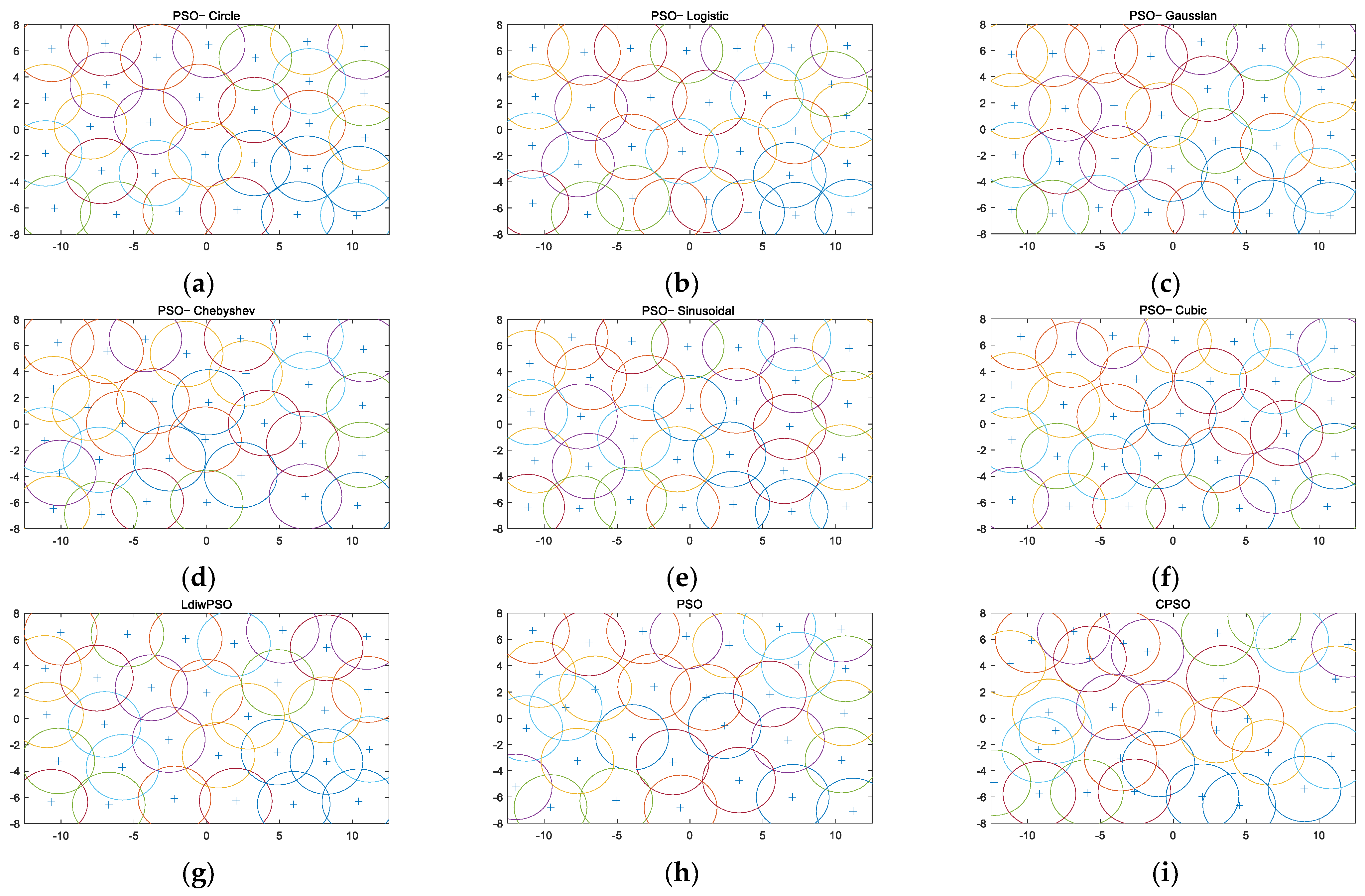
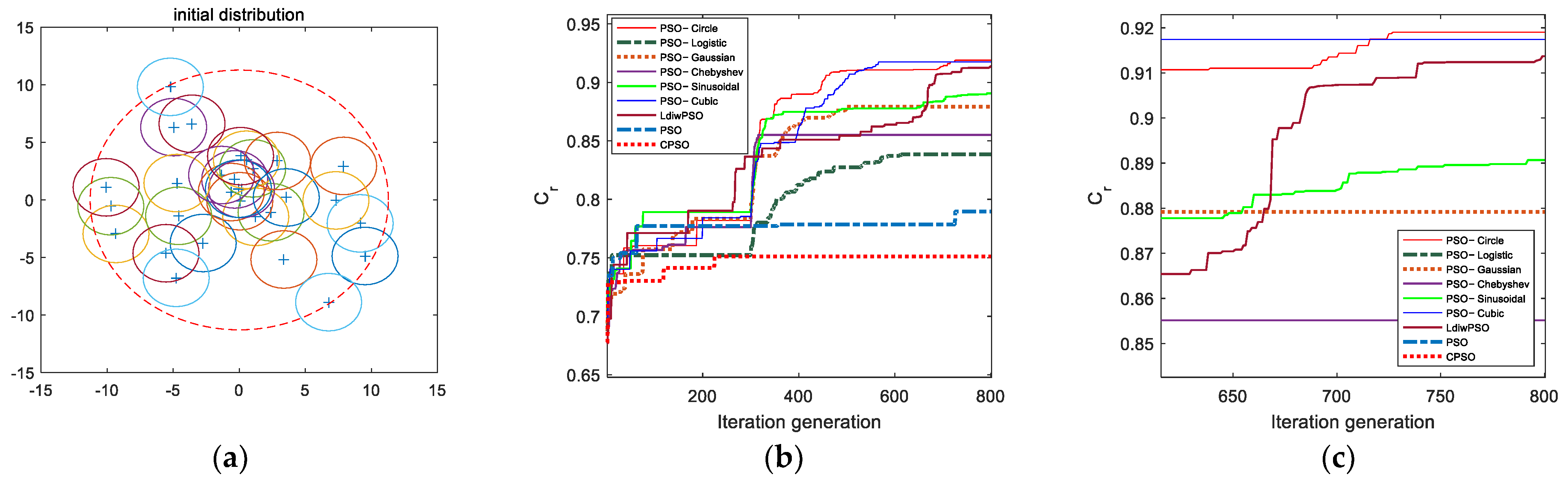
4. Simulation Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Akyildiz, I.F.; Su, W.; Sankarasubramaniam, Y.; Cayirci, E. A Survey on Sensor Networks. IEEE Commun. Mag. 2002, 40, 102–114. [Google Scholar] [CrossRef] [Green Version]
- Piromalis, D.; Arvanitis, K. Radio Frequency Identification and Wireless Sensor Networks Application Domains Integration Using DASH7 Mode 2 Standard in Agriculture. Int. J. Sustain. Agric. Manag. Inform. 2015, 1, 178. [Google Scholar] [CrossRef]
- Qadir, J.; UIlah, U.; de Abajo, B.S.; Zapirain, B.G. Energy-Aware and Reliability Based Localization-Free Cooperative Acoustic Wireless Sensor Networks. IEEE Access 2020, 8, 121366–121384. [Google Scholar] [CrossRef]
- Borja, B.; Carlos, M.; Ramón, A.; Tomás, R. A Hardware-Supported Algorithm for Self-Managed and Choreographed Task Execution in Sensor Networks. Sensors 2018, 18, 812. [Google Scholar]
- Ghosha, A.; Dasb, S.K. Coverage and Connectivity Issues in Wireless Sensor Networks: A Survey. Pervasive Mob. Comput. 2008, 4, 303–334. [Google Scholar] [CrossRef]
- Wang, D.; Xie, B.; Agrawal, D.P. Coverage and Lifetime Optimization of Wireless Sensor Networks with Gaussian Distribution. IEEE Trans. Mob. Comput. 2008, 7, 1444–1458. [Google Scholar] [CrossRef]
- Jia, J.; Chen, J.; Chang, G.; Wen, Y.; Song, J. Multi–objective Optimization for Coverage Control in Wireless Sensor Network with Adjustable Sensing Radius. Comput. Math. Appl. 2009, 59, 1767–1775. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Liu, D.; Chen, M.; Liu, Y. An Energy–efficient Coverage Optimization Method for Wireless Sensor Networks Based on Multi–objective Quantum–inspired Cultural Algorithm. In Proceedings of the ISNN’13: Proceedings of the 10th international conference on Advances in Neural Networks, Dalian, China, 4–6 July 2013; Springer: Berlin/Heidelberg, Germany, 2013; p. 349. [Google Scholar]
- Wang, L.; Wu, W.; Qi, J.; Jia, Z. Wireless Sensor Network Coverage Optimization Based on Whale Group Algorithm. Comput. Sci. Inf. Syst. 2018, 15, 569–583. [Google Scholar] [CrossRef] [Green Version]
- Deepa, A.; Venkataraman, R. Enhancing Whale Optimization Algorithm with Levy Flight for Coverage Optimization in Wireless Sensor Networks. Comput. Electr. Eng. 2021, 94, 107359. [Google Scholar] [CrossRef]
- Khalaf, O.I.; Abdulsahib, G.M.; Sabbar, B.M. Optimization of Wireless Sensor Network Coverage Using the Bee Algorithm. J. Inf. Sci. Eng. 2020, 36, 377–386. [Google Scholar]
- Roselin, I.; Latha, P. Energy Efficient Coverage Using Artificial Bee Colony Optimization in Wireless Sensor Networks. J. Sci. Ind. Res. 2016, 75, 19–27. [Google Scholar]
- Zhu, F.; Wang, W. A Coverage Optimization Method for WSNs Based on the Improved Weed Algorithm. Sensors 2021, 21, 5869. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; You, H.; Yue, Y.; Cao, L. A Novel Topology Optimization of Coverage-oriented Strategy for Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2021, 17, 155014772199229. [Google Scholar] [CrossRef]
- Aca, B.; Ddb, C. Energy-efficient Coverage Optimization in Wireless Sensor Networks Based on Voronoi-Glowworm Swarm Optimization-K-Means Algorithm. Ad Hoc Netw. 2021, 122, 102660. [Google Scholar]
- Chowdhury, A.; De, D. Fis-rgso: Dynamic Fuzzy Inference System Based Reverse Glowworm Swarm Optimization of Energy and Coverage in Green Mobile Wireless Sensor Networks. Comput. Commun. 2020, 163, 12–34. [Google Scholar] [CrossRef]
- Cao, L.; Yue, Y.; Cai, Y.; Zhang, Y. A Novel Coverage Optimization Strategy for Heterogeneous Wireless Sensor Networks Based on Connectivity and Reliability. IEEE Access 2021, 9, 18424–18442. [Google Scholar] [CrossRef]
- Ding, Y.S.; Lu, X.J.; Hao, K.R.; Li, L.F.; Hu, Y.F. Target Coverage Optimisation of Wireless Sensor Networks Using a Multi-Objective Immune Co-evolutionary Algorithm. Int. J. Syst. Sci. 2011, 42, 1531–1541. [Google Scholar] [CrossRef]
- Xenakis, A.; Foukalas, F.; Stamoulis, G.; Katsavounidis, I. Topology Control with Coverage and Lifetime Optimization of Wireless Sensor Networks with Unequal Energy Distribution. Comput. Electr. Eng. 2017, 64, 182–199. [Google Scholar] [CrossRef]
- Lee, J.W.; Choi, B.S.; Lee, J.J. Energy-efficient Coverage of Wireless Sensor Networks Using Ant Colony Optimization with Three Types of Pheromones. IEEE Trans. Ind. Inform. 2017, 7, 419–427. [Google Scholar] [CrossRef]
- Binh, H.T.T.; Hanh, N.T.; Van Quan, L.; Dey, N. Improved Cuckoo Search and Chaotic Flower Pollination Optimization Algorithm for Maximizing Area Coverage in Wireless Sensor Networks. Neural Comput. Appl. 2018, 30, 2305–2317. [Google Scholar] [CrossRef]
- Gupta, G.P.; Jha, S. Biogeography-based Optimization Scheme for Solving the Coverage and Connected Node Placement Problem for Wireless Sensor Networks. Wirel. Netw. 2019, 25, 3167–3177. [Google Scholar] [CrossRef]
- Miao, Z.; Yuan, X.; Zhou, F.; Qiu, X.; Chen, K. Grey Wolf Optimizer with an Enhanced Hierarchy and Its Application to the Wireless Sensor Network Coverage Optimization Problem. Appl. Soft Comput. 2020, 96, 10660. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, L.; Yue, Y.; Cai, Y.; Hang, B. A Novel Coverage Optimization Strategy Based on Grey Wolf Algorithm Optimized by Simulated Annealing for Wireless Sensor Networks. Comput. Intell. Neurosci. 2021, 2021, 6688408. [Google Scholar] [CrossRef] [PubMed]
- Subramanian, K.; Shanmugavel, S. A Complete Continuous Target Coverage Model for Emerging Applications of Wireless Sensor Network Using Termite Flies Optimization Algorithm. Wirel. Pers. Commun. 2021, 1–23. [Google Scholar] [CrossRef]
- Sun, Z.; Shu, Y.; Xing, X.; Wei, W.; Song, H.; Li, W. Lpocs: A Novel Linear Programming Optimization Coverage Scheme in Wireless Sensor Networks. Ad Hoc Sens. Wirel. Netw. 2016, 33, 173–197. [Google Scholar]
- Mostafaei, H.; Meybodi, M.R. An Energy Efficient Barrier Coverage Algorithm for Wireless Sensor Networks. Wirel. Pers. Commun. 2014, 77, 2099–2115. [Google Scholar] [CrossRef]
- Zhang, H.H.; Jennifer, C.; Hou, J. Maintaining Sensing Coverage and Connectivity in Large Sensor Networks. J. Wirel. Ad Hoc Sens. Netw. 2005, 1, 89–123. [Google Scholar]
- Tarnaris, K.; Preka, I.; Kandris, D.; Alexandridis, A. Coverage and K-coverage Optimization in Wireless Sensor Networks Using Computational Intelligence Methods: A Comparative Study. Electronics 2020, 9, 675. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Eberhart, R.A. Modified Particle Swarm Optimizer. In Proceedings of the IEEE International Conference on Evolutionary Computation Proceedings, Anchorage, AK, USA, 4–9 May 1998. [Google Scholar]
- Wang, X.; Wang, S.; Ma, J.J. An Improved Co–evolutionary Particle Swarm Optimization for Wireless Sensor Networks with Dynamic Deployment. Sensors 2007, 7, 354–370. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Li, J.; Wang, H. A Hybrid Particle Swarm Optimization for Wireless Sensor Network Coverage Problem. Sens. Lett. 2012, 10, 1744–1750. [Google Scholar] [CrossRef]
- Wang, Y.; Li, M. Coverage Control Optimization Algorithm for Wireless Sensor Networks Based on Combinatorial Mathematics. Math. Probl. Eng. 2021, 2021, 6066379. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, X.; Yu, Z. K-barrier Coverage in Wireless Sensor Networks Based on Immune Particle Swarm Optimization. Int. J. Sens. Netw. 2018, 27, 250–258. [Google Scholar] [CrossRef]
- Bai, X.; Li, S.; Xu, J. Mobile Sensor Deployment Optimization for K-coverage in Wireless Sensor Networks with a Limited Mobility Model. IETE Tech. Rev. 2010, 27, 124–137. [Google Scholar] [CrossRef]
- Xu, Y.; Ding, O.; Qu, R.; Li, K. Hybrid Multi-objective Evolutionary Algorithms Based on Decomposition for Wireless Sensor Network Coverage Optimization. Appl. Soft Comput. 2018, 68, 268–282. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Ma, J.J.; Sheng, W.; Bi, D.W. Distributed Particle Swarm Optimization and Simulated Annealing for Energy-efficient Coverage in Wireless Sensor Networks. Sensors 2007, 7, 628–648. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.H.; Eberhart, R.C. Empirical Study of Particle Swarm Optimization. In Proceedings of the Congress on Evolutionary Computation, Washington, DC, USA, 6–9 July 1999. [Google Scholar]
- Eberhart, R.C.; Shi, Y.H. Comparing Inertia Weights and Constriction Factors in Particle Swarm Optimization. In Proceedings of the IEEE Congress on Evolutionary Computation, La Jolla, CA, USA, 16–19 July 2000. [Google Scholar]
- Clerc, M.; Kennedy, J.E. The Particle Swarm–explosion, Stability in a Multidimensional Complex Space. IEEE Trans. Evol. Comput. 2002, 6, 259–267. [Google Scholar] [CrossRef] [Green Version]
- Sekikawa, M.; Kousaka, T.; Tsubone, T.; Inaba, N.; Okazaki, H. Bifurcation Analysis of Mixed-mode Oscillations and Farey Trees in an Extended Bonhoeffer–Van Der Pol Oscillator. Phys. D Nonlinear Phenom. 2022, 433, 133178. [Google Scholar] [CrossRef]
- Ahmad, J.; Hwang, S.O. Chaos-based Diffusion for Highly Autocorrelated Data in Encryption Algorithms. Nonlinear Dyn. 2015, 82, 1839–1850. [Google Scholar] [CrossRef]
- Yuan, X.; Zhang, T.; Xiang, Y.; Dai, X. Parallel Chaos Optimization Algorithm with Migration and Merging Operation. Appl. Soft Comput. 2015, 35, 591–604. [Google Scholar] [CrossRef]
- Kohli, M.; Arora, S. Chaotic Grey Wolf Optimization Algorithm for Constrained Optimization Problems. J. Comput. Des. Eng. 2018, 5, 458–472. [Google Scholar] [CrossRef]
- Tavazoei, M.S.; Haeri, M. Comparison of Different One-dimensional Maps as Chaotic Search Pattern in Chaos Optimization Algorithms. Appl. Math. Comput. 2007, 187, 1076–1085. [Google Scholar] [CrossRef]
- Jiang, C.; Bompard, E.A. Hybrid Method of Chaotic Particle Swarm Optimization and Linear Interior for Reactive Power Optimisation. Math. Comput. Simul. 2005, 68, 57–65. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Map Name | Map Equations | Parameters | Range |
|---|---|---|---|---|
| 1 | Circle map | |||
| 2 | Logistic map | , except 0.25, 0.5 and 0.75 | ||
| 3 | Gaussian map | , ; , | ||
| 4 | Chebyshev map | |||
| 5 | Sinusoidal map | |||
| 6 | Cubic map |
| Algorithm | Coverage Rate C | Relative Ratio of Coverage Rate C/C0 | Average Moving Distance (m) | Computing Time (s) |
|---|---|---|---|---|
| PSO-Circle | 0.9444 | 1.3467 | 11.1881 | 253.5560 |
| PSO-Logistic | 0.9372 | 1.3363 | 10.4060 | 252.4002 |
| PSO-Gaussian | 0.9328 | 1.3301 | 10.3102 | 249.2707 |
| PSO-Chebyshev | 0.9089 | 1.2961 | 10.2535 | 249.5167 |
| PSO-Sinusoidal | 0.9306 | 1.3270 | 10.3612 | 253.5338 |
| PSO-Cubic | 0.9317 | 1.3286 | 10.6821 | 250.6576 |
| LdiwPSO | 0.9385 | 1.3383 | 9.9958 | 251.2138 |
| PSO | 0.9127 | 1.3015 | 9.9053 | 251.7490 |
| CPSO | 0.8038 | 1.1461 | 8.9682 | 253.6211 |
| Algorithm | Coverage Rate C | Relative Ratio of Coverage Rate C/C0 | Average Moving Distance (m) | Computing Time (s) |
|---|---|---|---|---|
| PSO-Circle | 0.9438 | 1.2948 | 9.9614 | 240.0654 |
| PSO-Logistic | 0.9433 | 1.2942 | 9.9669 | 240.1280 |
| PSO-Gaussian | 0.9422 | 1.2926 | 10.3507 | 243.1568 |
| PSO-Chebyshev | 0.9192 | 1.2610 | 10.5988 | 239.6768 |
| PSO-Sinusoidal | 0.9421 | 1.2925 | 9.7804 | 240.9370 |
| PSO-Cubic | 0.9415 | 1.2916 | 10.5918 | 242.2828 |
| LdiwPSO | 0.9420 | 1.2924 | 5.3234 | 241.4363 |
| PSO | 0.9197 | 1.2617 | 5.2271 | 239.4996 |
| CPSO | 0.8036 | 1.1025 | 4.1400 | 242.8174 |
| Algorithm | Coverage Rate C | Relative Ratio of Coverage Rate C/C0 | Average Moving Distance (m) | Computing Time (s) |
|---|---|---|---|---|
| PSO-Circle | 0.9190 | 1.3577 | 4.7833 | 234.7328 |
| PSO-Logistic | 0.8384 | 1.2386 | 4.4619 | 237.3758 |
| PSO-Gaussian | 0.8792 | 1.2989 | 4.8718 | 238.1806 |
| PSO-Chebyshev | 0.8552 | 1.2634 | 4.7083 | 231.7538 |
| PSO-Sinusoidal | 0.8907 | 1.3158 | 4.2943 | 235.2170 |
| PSO-Cubic | 0.9174 | 1.3553 | 4.4186 | 230.4234 |
| LdiwPSO | 0.9137 | 1.3498 | 5.3896 | 234.5706 |
| PSO | 0.7896 | 1.1665 | 4.8956 | 232.8963 |
| CPSO | 0.7511 | 1.1096 | 5.4600 | 233.0806 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Q.; Li, C.; Zhu, D.; Xie, C. Coverage Optimization of Wireless Sensor Networks Using Combinations of PSO and Chaos Optimization. Electronics 2022, 11, 853. https://doi.org/10.3390/electronics11060853
Zhao Q, Li C, Zhu D, Xie C. Coverage Optimization of Wireless Sensor Networks Using Combinations of PSO and Chaos Optimization. Electronics. 2022; 11(6):853. https://doi.org/10.3390/electronics11060853
Chicago/Turabian StyleZhao, Qiang, Changwei Li, Dong Zhu, and Chunli Xie. 2022. "Coverage Optimization of Wireless Sensor Networks Using Combinations of PSO and Chaos Optimization" Electronics 11, no. 6: 853. https://doi.org/10.3390/electronics11060853
APA StyleZhao, Q., Li, C., Zhu, D., & Xie, C. (2022). Coverage Optimization of Wireless Sensor Networks Using Combinations of PSO and Chaos Optimization. Electronics, 11(6), 853. https://doi.org/10.3390/electronics11060853