
Adaptation Scheduling for Urban Traffic Lights via FNT-Based Prediction of Traffic Flow


Abstract
1. Introduction
- (1)
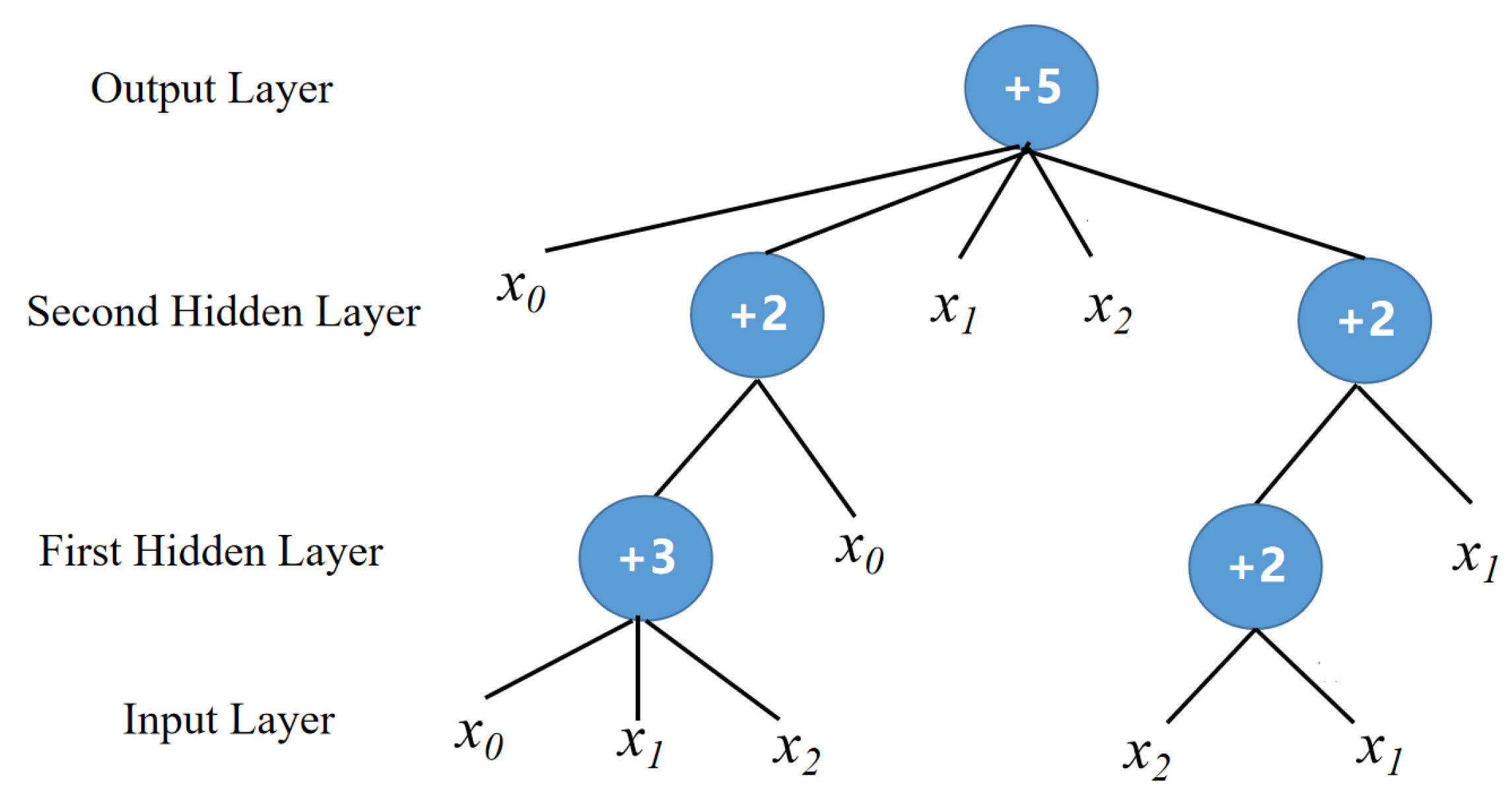
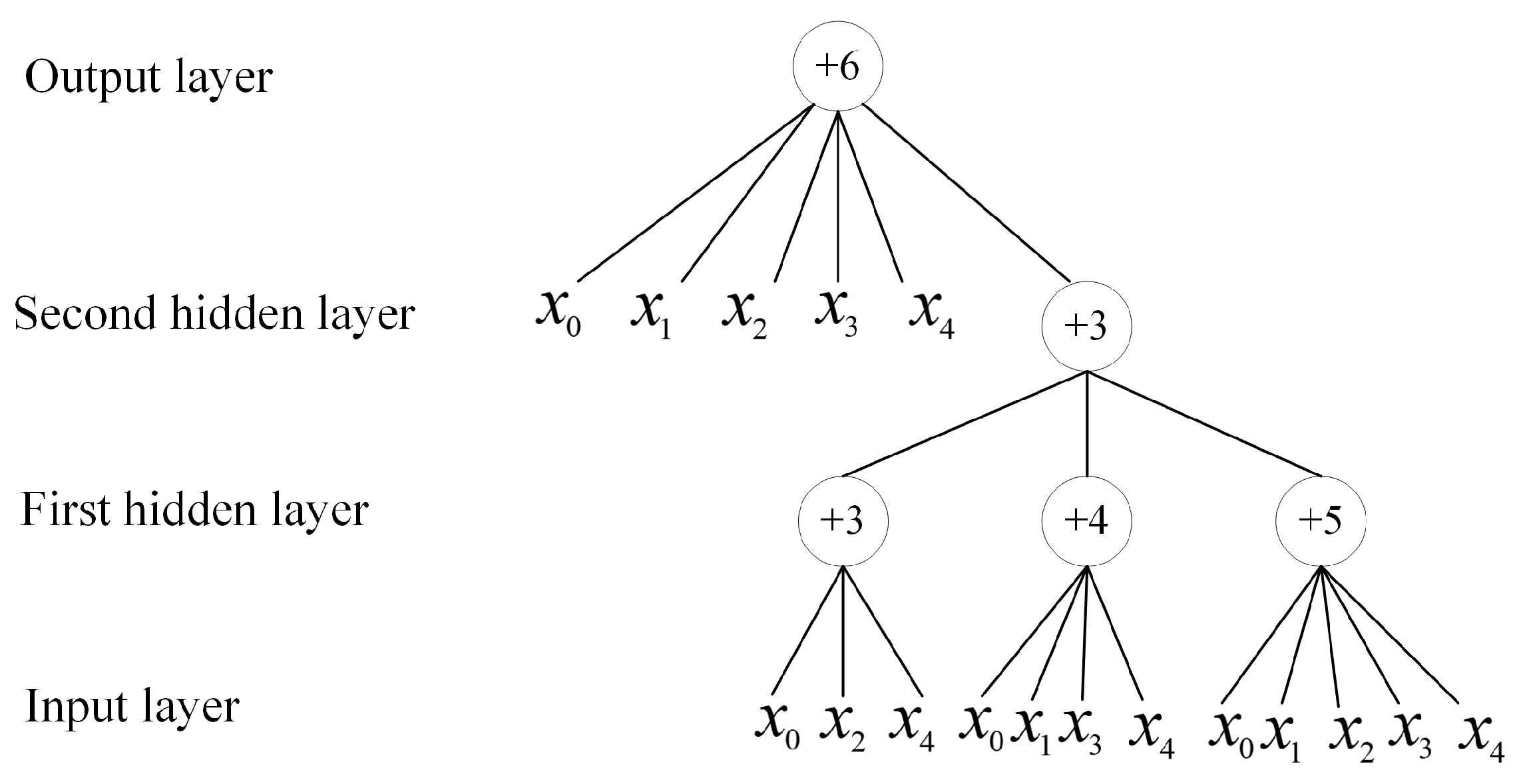
- By employing genetic programming and particle swarm optimization algorithm (PSO), the structure and parameters of flexible neural tree (FNT) are designed to predict the traffic flow in the next-time frame, in which the variable inputs are allowed for covering many complicated factors in real-time traffic system concerning holidays and weather conditions;
- (2)
- A duration adjustment strategy of signal cycle is proposed for enhancing the intersection’s ability to undertake the overload or lightweight traffic flow in the next-time frame;
- (3)
- Linking the competitive relationship among the contradictory phases with the prediction traffic flow directly, an elastic adaption scheduling strategy for the separate phases’ green lights is derived from the analytical solution to achieve the adaptability for the upcoming traffic flow and make full use of the utilization of the presetting duration of signal cycle, which is obtained from a designed tradeoff scheduling optimization problem.
2. Overall Frame Structure for Urban Traffic Light Scheduling
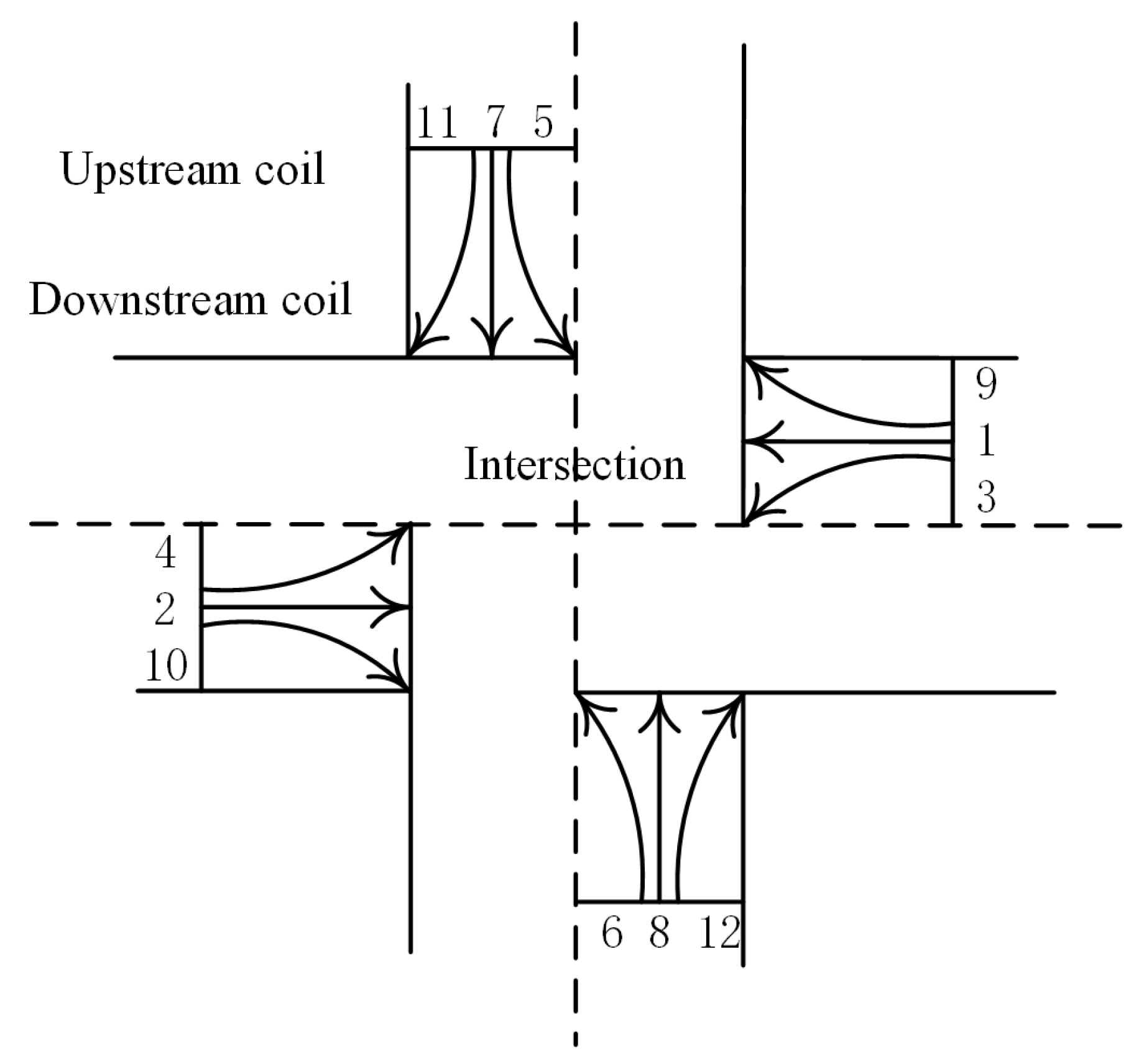
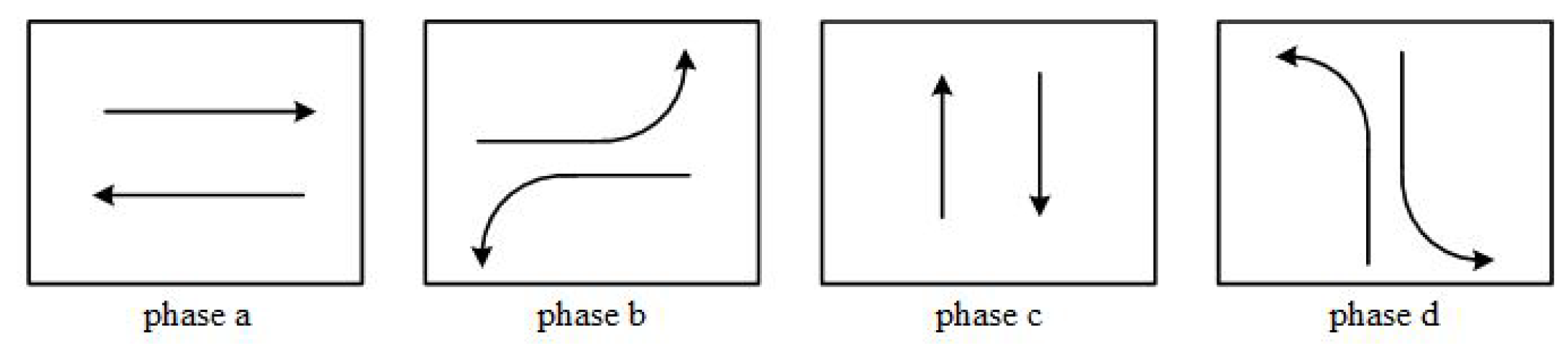
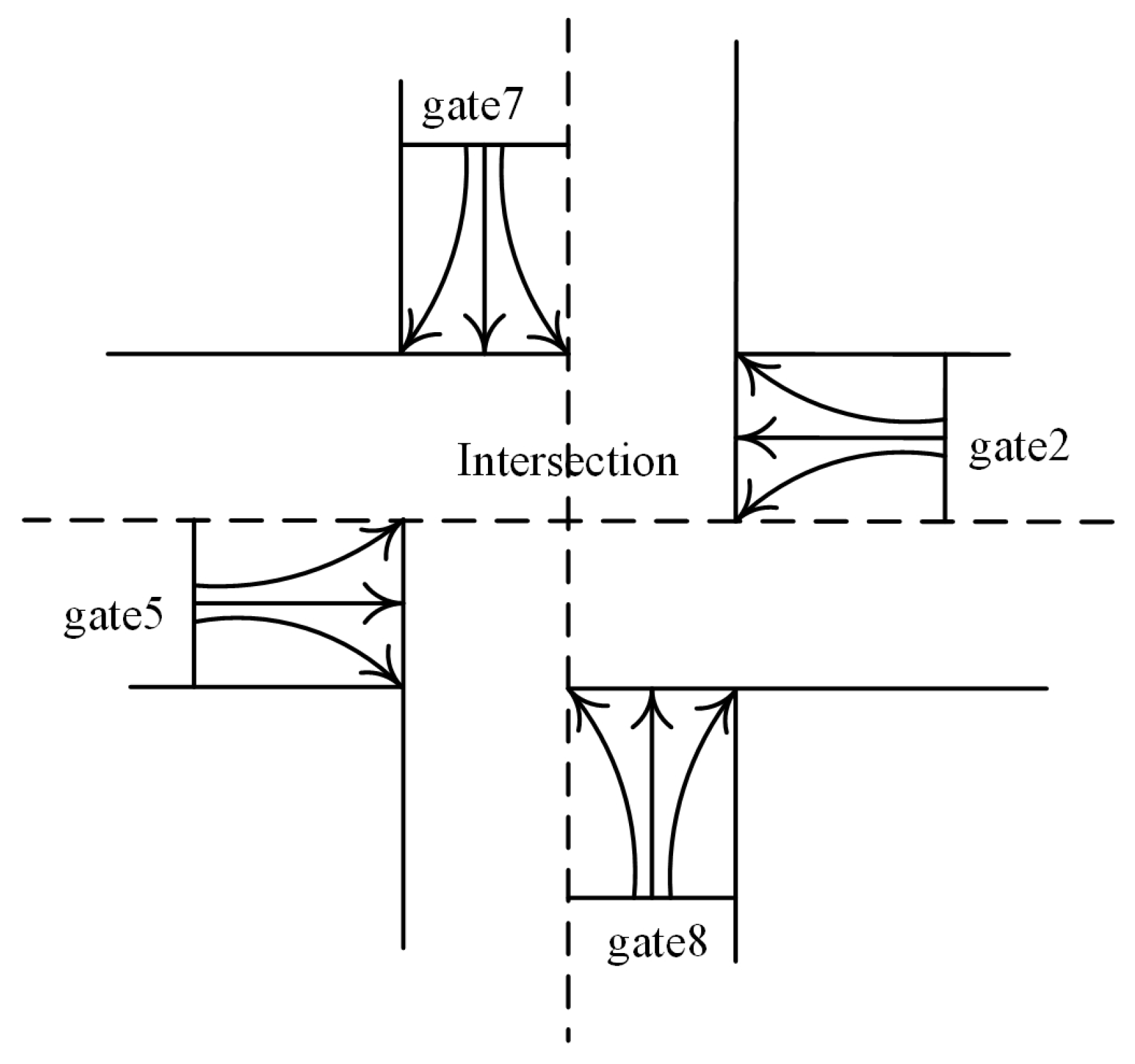
2.1. Signal Phases in Traffic Light Control Systems
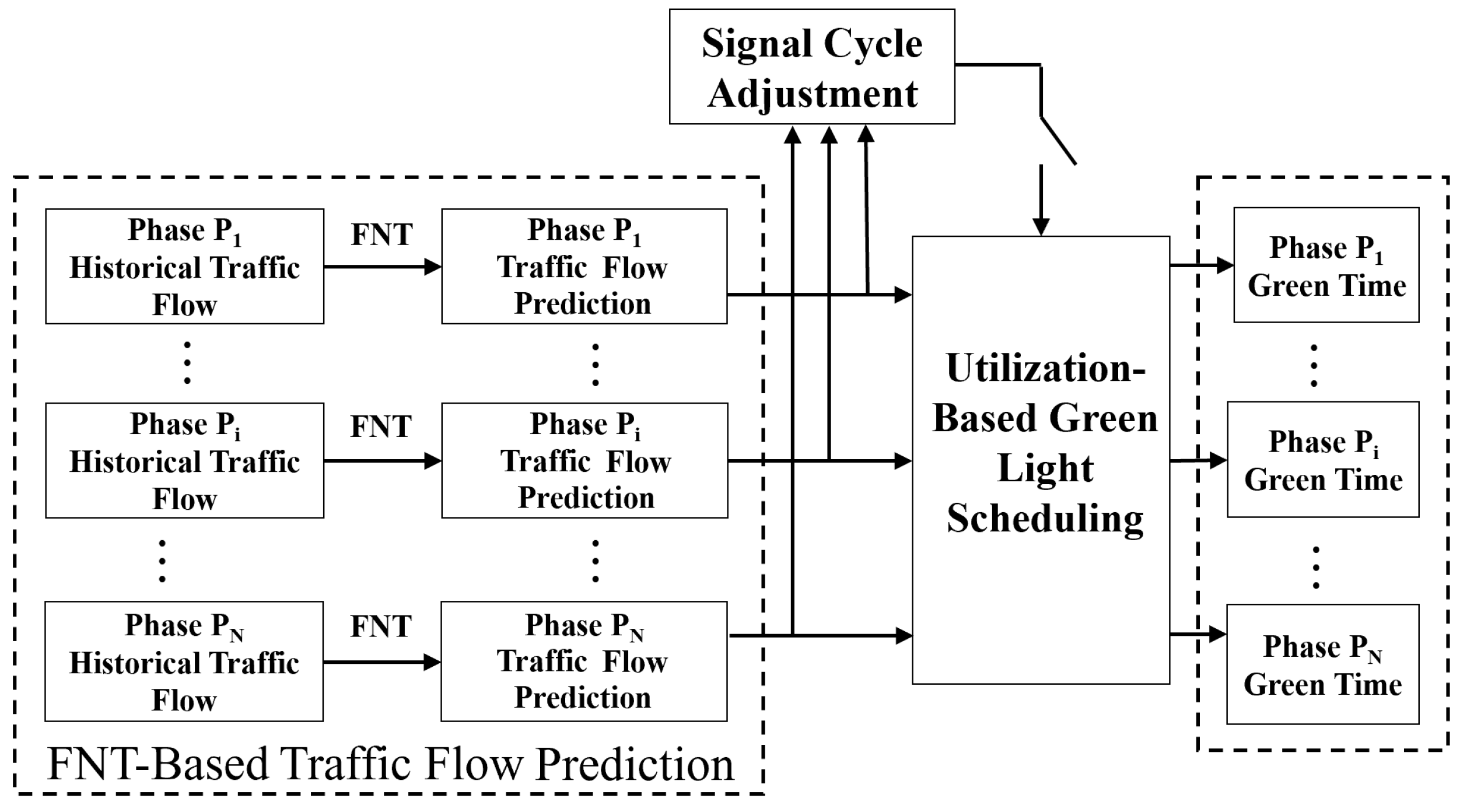
2.2. Framework for Traffic Light Adaptation Scheduling
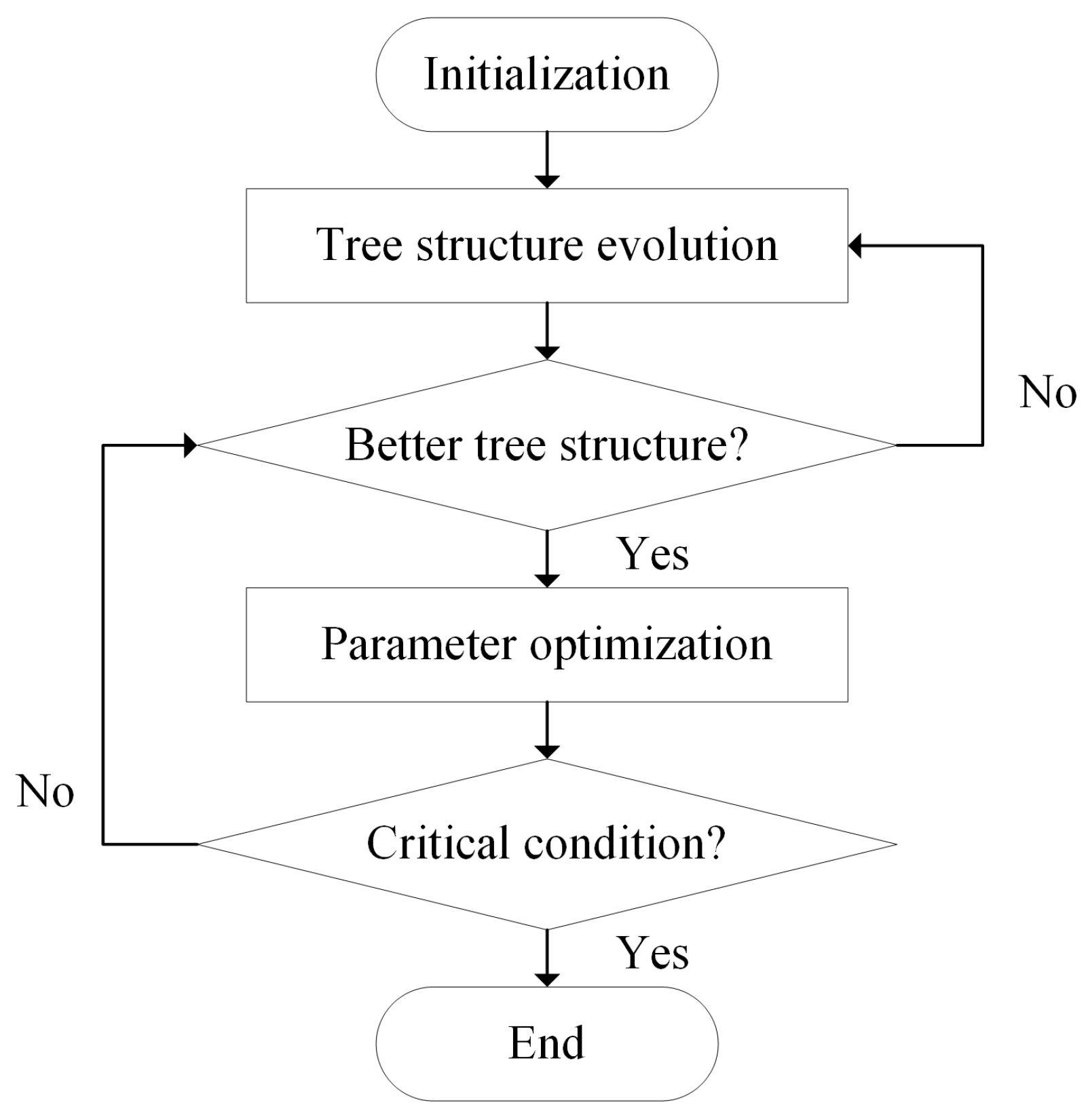
3. Signal Phase Traffic Flow Prediction via FNT
| Algorithm 1: The particle swarm optimization (PSO) |
|
| Algorithm 2: Signal Phase Traffic Flow Prediction via FNT. |
|
4. Adaptation Strategy for Urban Traffic Light Scheduling
4.1. Duration Adjustment for Signal Cycle Based on Traffic Flow Prediction
- (1)
- If the traffic load is too heavy (i.e., q is with large value) or is increased significantly (i.e., is with large positive number), the duration of signal cycle will be prolonged;
- (2)
- If the traffic load is too light (i.e., q is with small value) or is decreased significantly (i.e., is with large negative number), the duration of signal cycle will be reduced to save the intersection sources;
- (3)
- Otherwise, if the traffic load is neither heavy nor too light (i.e., q is with moderate value) or is changed smoothly (i.e., is with moderate value), the duration of signal cycle will be maintained and the green time for each phase will be scheduled directly in the next-time frame.
- (1)
- When is bigger than a maximum threshold , the traffic flow is too heavy. Thus set T to its maximum according towhere is the allowed maximum green time of the ith phase in an intersection.
- (2)
- When is smaller than a minimum threshold , the traffic flow is too light. Thus, set T to its minimum according towhere is the allowed minimum green time of the ith phase in an intersection.
- (3)
- Otherwise, i.e., is between and , set T between its upper and lower bounds according to
4.2. Elastic Utilization-Based Adaptive Scheduling for Phase Green Light
4.3. Algorithm for Adaptation Scheduling for Urban Traffic Light
| Algorithm 3: Adaptation Scheduling of Urban Traffic Lights. |
|
5. Simulation Results and Analysis
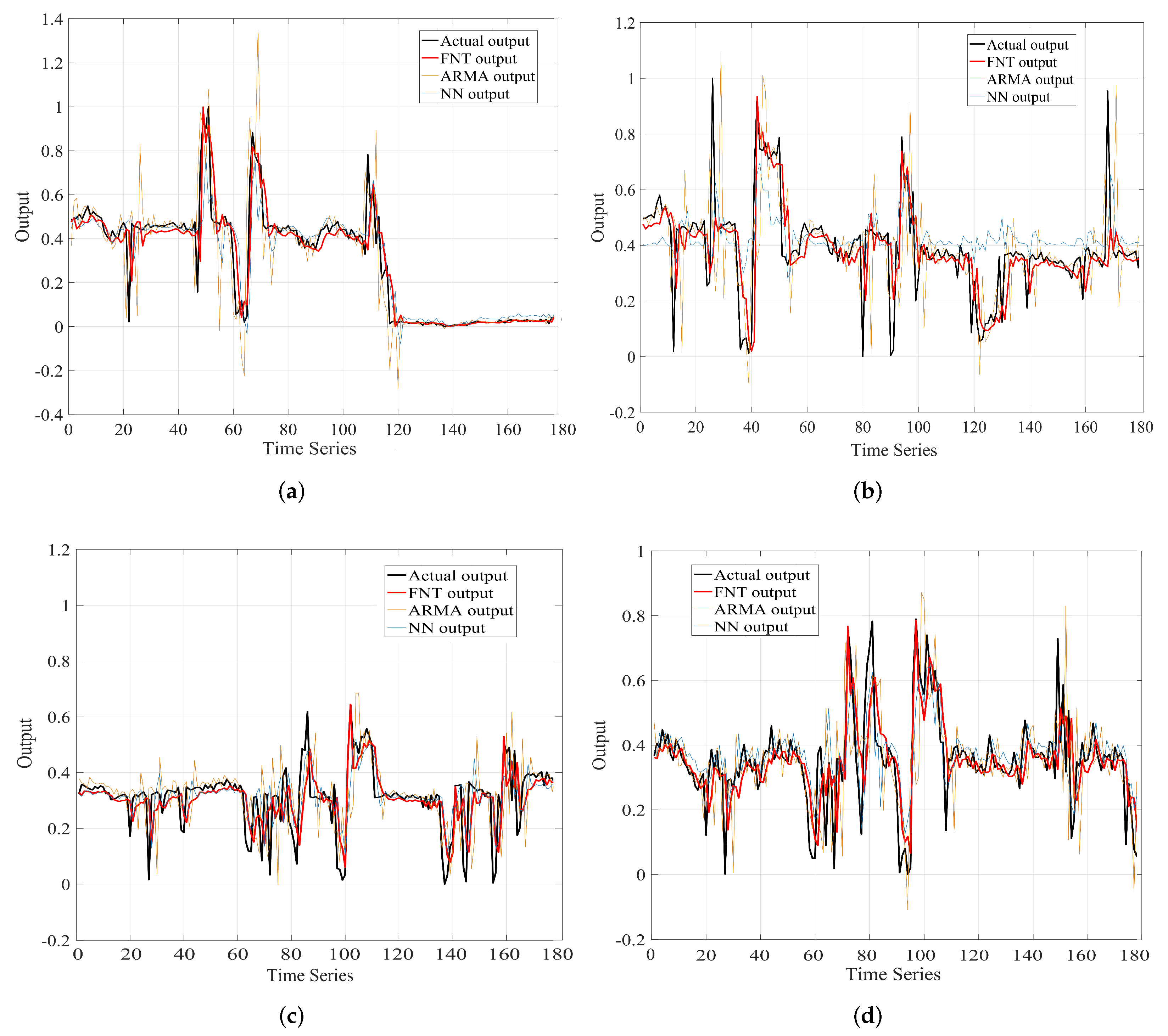
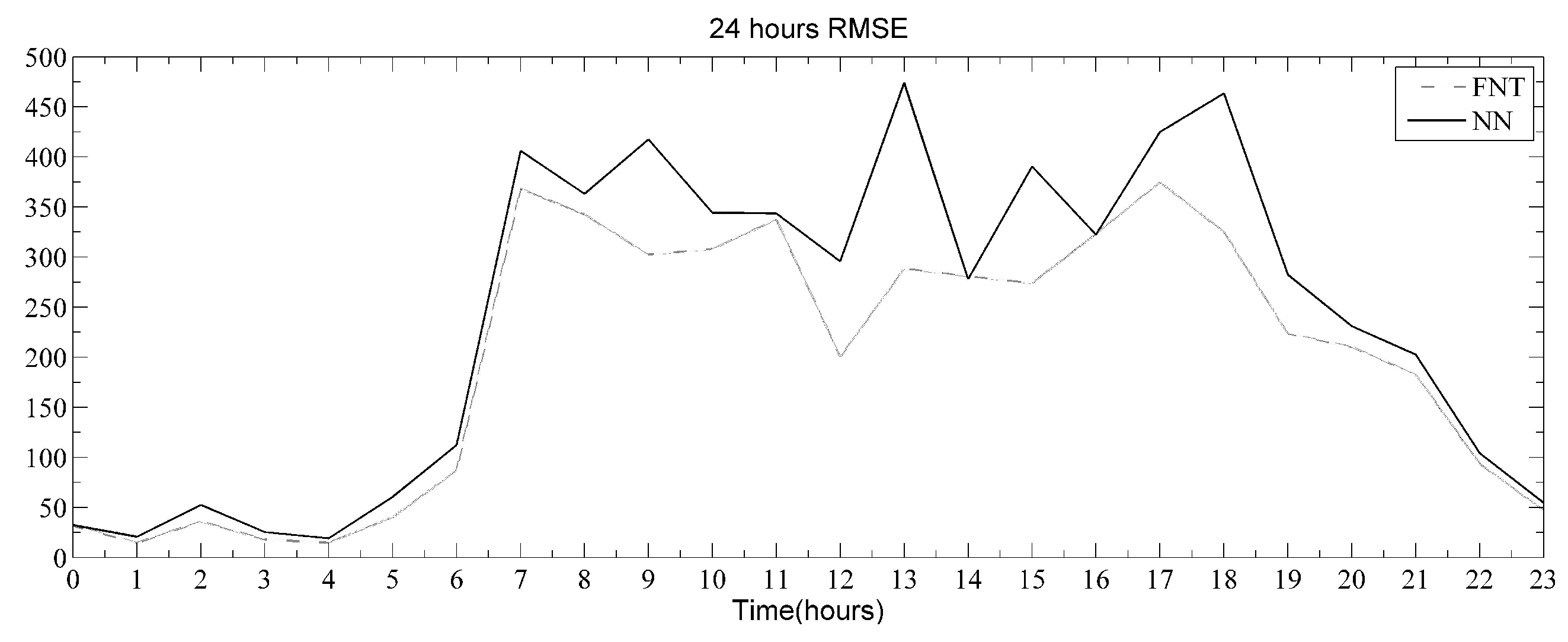
5.1. Performance of Traffic Flow Prediction via FNT
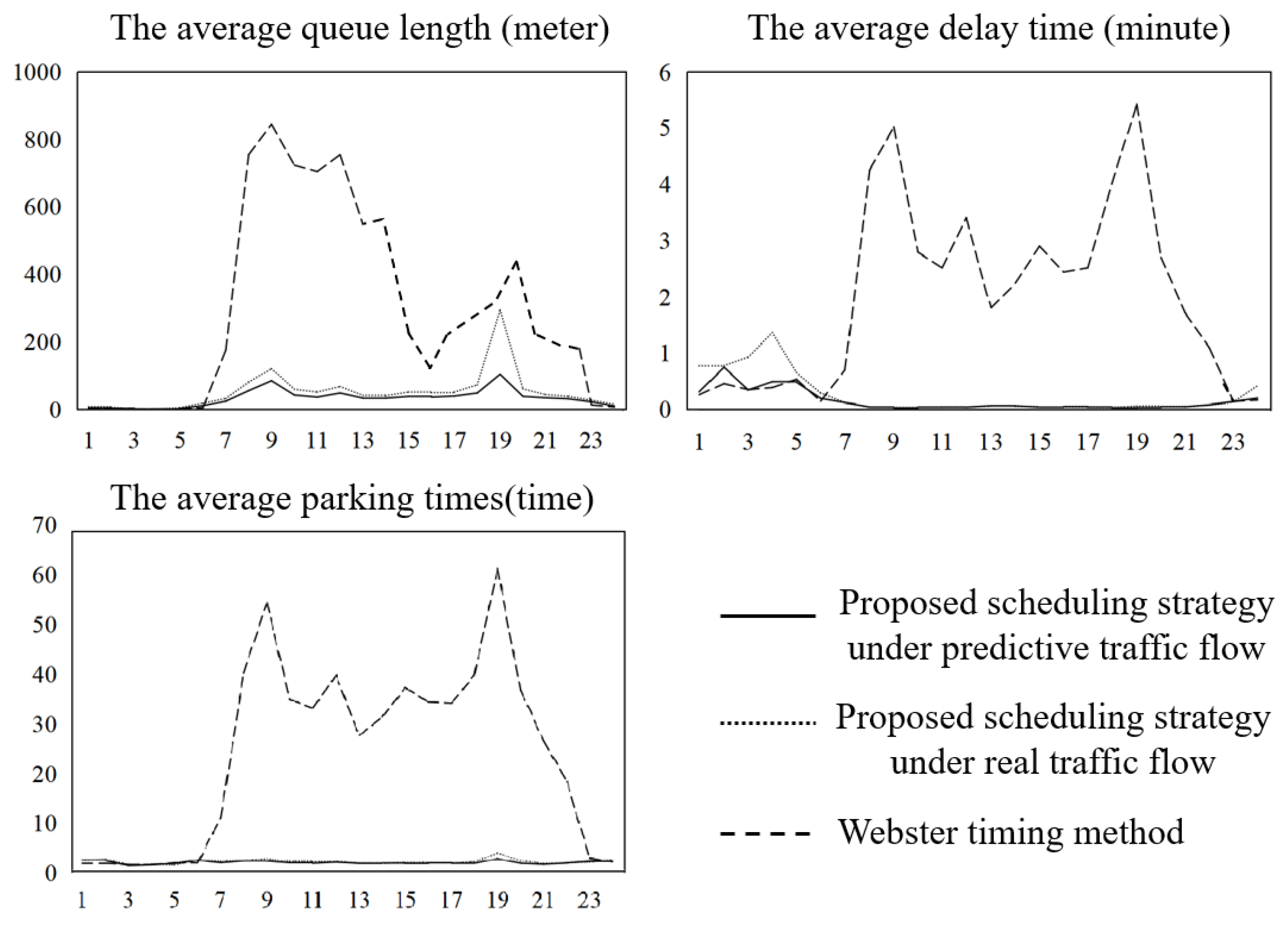
5.2. Performance of Adaptation Scheduling Algorithm of Urban Traffic Light
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Chen, L.-W.; Hu, T.-Y. Flow equilibrium under dynamic traffic assignment and signal controlan illustration of pretimed and actuated signal control policies. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1266–1276. [Google Scholar] [CrossRef]
- Pacheco, A.; Simoes, M.L.; Milheiro-Oliveira, P. Queues with server vacations as a model for pretimed signalized urban traffic. Transp. Sci. 2017, 51, 841–851. [Google Scholar] [CrossRef]
- Spall, J.C.; Chin, D.C. Traffic-responsive signal timing for system-wide traffic control. Transp. Res. Part C Emerg. Technol. 1997, 5, 153–163. [Google Scholar] [CrossRef]
- Li, Y.-Q.; Li, K.; Feng, Y.-J. Data-driven traffic-responsive green wave coordinated signal control. Control Theory Appl. 2016, 33, 588–598. [Google Scholar]
- Jin, J.; Ma, X.; Kosonen, I. An intelligent control system for traffic lights with simulation-based evaluation. Control Eng. Pract. 2017, 58, 24–33. [Google Scholar] [CrossRef]
- Zhao, D.; Dai, Y.; Zhang, Z. Computational intelligence in urban traffic signal control: A survey. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 485–494. [Google Scholar] [CrossRef]
- Liang, X.; Du, X.; Wang, G.; Han, Z. A deep reinforcement learning network for traffic light cycle control. IEEE Trans. Veh. Technol. 2019, 68, 1243–1253. [Google Scholar] [CrossRef]
- Vilarinho, C.; Tavares, J.P.; Rossetti, R.J.F. Design of a multiagent system for real-time traffic control. IEEE Intell. Syst. 2016, 31, 68–80. [Google Scholar] [CrossRef]
- Shirvani, S.M.J.; Maleki, H.R. Maximum green time settings for traffic-actuated signal control at isolated intersections using fuzzy logic. Int. J. Fuzzy Syst. 2017, 19, 247–256. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, J.; Wang, R.; Chen, L.; Chen, C.L.P.; Zhang, T.; Han, S. Transfer Collaborative Fuzzy Clustering in Distributed Peer-to-Peer Networks. IEEE Trans. Fuzzy Syst. 2022, 30, 500–514. [Google Scholar]
- Grandinetti, P.; Canudas-de-Wit, C.; Garin, F. Distributed optimal traffic lights design for large-scale urban networks. IEEE Trans. Control Syst. Technol. 2019, 27, 950–963. [Google Scholar] [CrossRef]
- Han, S.Y.; Zhou, J.; Chen, Y.H. Active fault-tolerant control for discrete vehicle active suspension via reduced-order observer. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6701–6711. [Google Scholar] [CrossRef]
- Knorn, S.; Teixeira, A. Effects of jamming attacks on a control system with energy harvesting. IEEE Control Syst. Lett. 2019, 3, 29–34. [Google Scholar] [CrossRef]
- Li, L.; Qin, L.; Xu, X.; Zhang, J.; Wang, Y.; Ran, B. Day-ahead traffic flow forecasting based on a deep belief network optimized by the multi-objective particle swarm algorithm. Knowl.-Based Syst. 2019, 172, 1–14. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, K.; Li, J.; Lin, X.; Yang, B. LSTM-based traffic flow prediction with missing data. Neurocomputing 2018, 318, 297–305. [Google Scholar] [CrossRef]
- Wu, Y.; Tan, H.; Qin, L.; Ran, B.; Jiang, Z. A hybrid deep learning based traffic flow prediction method and its understanding. Transp. Res. Part C Emerg. Technol. 2018, 90, 166–180. [Google Scholar] [CrossRef]
- Habtemichael, F.G.; Cetin, M. Short-term traffic flow rate forecasting based on identifying similar traffic patterns. Transp. Res. Part C Emerg. Technol. 2016, 66, 61–78. [Google Scholar] [CrossRef]
- Zhang, K.; He, F.; Zhang, Z.; Lin, X.; Li, M. Graph attention temporal convolutional network for traffic speed forecasting on road networks. Transp. B Transp. Dyn. 2021, 9, 622–640. [Google Scholar] [CrossRef]
- Yu, J.Q.; Markos, C.; Zhang, S. Long-term urban traffic speed prediction with deep learning on graphs. IEEE Trans. Intell. Transp. Syst. 2021. [Google Scholar] [CrossRef]
- Guo, K.; Hu, Y.; Sun, Y.; Qian, S.; Gao, J.; Yin, B. Hierarchical Graph Convolution Networks for Traffic Forecasting. Proc. AAAI Conf. Artif. Intell. 2021, 35, 151–159. [Google Scholar]
- Guo, K.; Hu, Y.; Qiang, Z.S.; Liu, H.; Zhang, K.; Sun, Y.; Guo, J.; Yin, B. Optimized graph convolution recurrent neural network for traffic rrediction. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1138–1149. [Google Scholar] [CrossRef]
- Wu, Z.; Pan, S.; Long, G.; Jiang, J.; Zhang, C. Graph waveNet for deep spatial-temporal graph modelling. arXiv 2019, arXiv:1906.00121. [Google Scholar]
- Carlos, Z.-G.; Chris, H. Expert system for traffic signal setting assistance. J. Transp. Eng. 1987, 113, 108–126. [Google Scholar]
- Porto, W., Jr.; Ferreira, A.C.M. Suggestions for a new traffic signal setting. Inf. Tecnol. 1997, 8, 305–315. [Google Scholar]
- Zhu, L.; Yu, F.R.; Wang, Y.; Ning, B.; Tang, T. Big data analytics in intelligent transportation systems: A survey. IEEE Trans. Intell. Transp. Syst. 2019, 20, 383–398. [Google Scholar] [CrossRef]
- Wolshon, A.B. Analysis of intersection delay under real-time adaptive signal control. Transp. Res. Part C Emerg. Technol. 1999, 7, 53–72. [Google Scholar] [CrossRef]
- Robertson, D.I.; Bretherton, R.D. Optimizing networks of traffic signals in real time-the scoot method. IEEE Trans. Veh. Technol. 1991, 40, 11–15. [Google Scholar] [CrossRef]
- Aoyama, K. Universal Traffic Management System (UTMS) in Japan. In Proceedings of the VNIS’94—1994 Vehicle Navigation and Information Systems Conference, Yokohama, Japan, 31 August–2 September 1994; pp. 619–622. [Google Scholar]
- Jayakrishnan, R.; Mahmassani, H.S. An evaluation tool for advanced traffic information and management systems in urban networks. Transp. Res. Part C Emerg. Technol. 1994, 2, 129–147. [Google Scholar] [CrossRef]
- Ossama, Y.; Nader, M. Employing cyber-physical systems: Dynamic traffic light control at road intersections. IEEE Internet Things J. 2017, 4, 2286–2296. [Google Scholar]
- Na, W.; Lee, Y.; Dao, N.N.; Vu, D.N.; Masood, A.; Cho, S. Directional link scheduling for real-time data processing in smart manufacturing system. IEEE Internet Things J. 2018, 5, 3661–3671. [Google Scholar] [CrossRef]
- Tian, Y.; Jiang, X.; Levy, D.; Agrawala, A. Local adjustment and global adaptation of control periods for QoC management of control systems. IEEE Trans. Control Syst. Technol. 2012, 20, 846–854. [Google Scholar] [CrossRef]
- Tian, Y.; Li, G. QoC Elastic scheduling for real-time control systems. Real-Time Syst. 2011, 47, 534–561. [Google Scholar] [CrossRef][Green Version]
- Liang, X.; Guler, S.I.; Gayah, V.V. An equitable traffic signal control scheme at isolated signalized intersections using Connected Vehicle technology. Transp. Res. Part C Emerg. Technol. 2020, 110, 81–97. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, B.; Dong, J.; Abraham, A. Time-series forecasting using flexible neural tree model. Inf. Sci. 2005, 174, 219–235. [Google Scholar] [CrossRef]
- Yang, B.; Chen, Y.H.; Jiang, M.Y. Reverse engineering of gene regulatory networks using flexible neural tree models. Neurocomputing 2013, 99, 458–466. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traffic Flow | (Vehicle) | Traffic Flow | (Vehicle) | Traffic Flow | (Vehicle) | |||
|---|---|---|---|---|---|---|---|---|
| Time (Hour) | True Data | Forescast Data | Time (Hour) | True Data | Forescast Data | Time (Hour) | True Data | Forescast Data |
| 0 | 22 | 29 | 8 | 452 | 342 | 16 | 422 | 352 |
| 1 | 15 | 13 | 9 | 387 | 317 | 17 | 482 | 328 |
| 2 | 10 | 11 | 10 | 333 | 315 | 18 | 577 | 446 |
| 3 | 15 | 11 | 11 | 397 | 351 | 19 | 376 | 305 |
| 4 | 17 | 16 | 12 | 227 | 164 | 20 | 207 | 172 |
| 5 | 28 | 34 | 13 | 277 | 189 | 21 | 165 | 141 |
| 6 | 102 | 88 | 14 | 425 | 353 | 22 | 109 | 80 |
| 7 | 454 | 178 | 15 | 394 | 387 | 23 | 41 | 36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, S.-Y.; Sun, Q.-W.; Yang, X.-H.; Han, R.-Z.; Zhou, J.; Chen, Y.-H. Adaptation Scheduling for Urban Traffic Lights via FNT-Based Prediction of Traffic Flow. Electronics 2022, 11, 658. https://doi.org/10.3390/electronics11040658
Han S-Y, Sun Q-W, Yang X-H, Han R-Z, Zhou J, Chen Y-H. Adaptation Scheduling for Urban Traffic Lights via FNT-Based Prediction of Traffic Flow. Electronics. 2022; 11(4):658. https://doi.org/10.3390/electronics11040658
Chicago/Turabian StyleHan, Shi-Yuan, Qi-Wei Sun, Xiao-Hui Yang, Rui-Zhi Han, Jin Zhou, and Yue-Hui Chen. 2022. "Adaptation Scheduling for Urban Traffic Lights via FNT-Based Prediction of Traffic Flow" Electronics 11, no. 4: 658. https://doi.org/10.3390/electronics11040658
APA StyleHan, S.-Y., Sun, Q.-W., Yang, X.-H., Han, R.-Z., Zhou, J., & Chen, Y.-H. (2022). Adaptation Scheduling for Urban Traffic Lights via FNT-Based Prediction of Traffic Flow. Electronics, 11(4), 658. https://doi.org/10.3390/electronics11040658