
Rate Maximization in a UAV Based Full-Duplex Multi-User Communication Network Using Multi-Objective Optimization



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
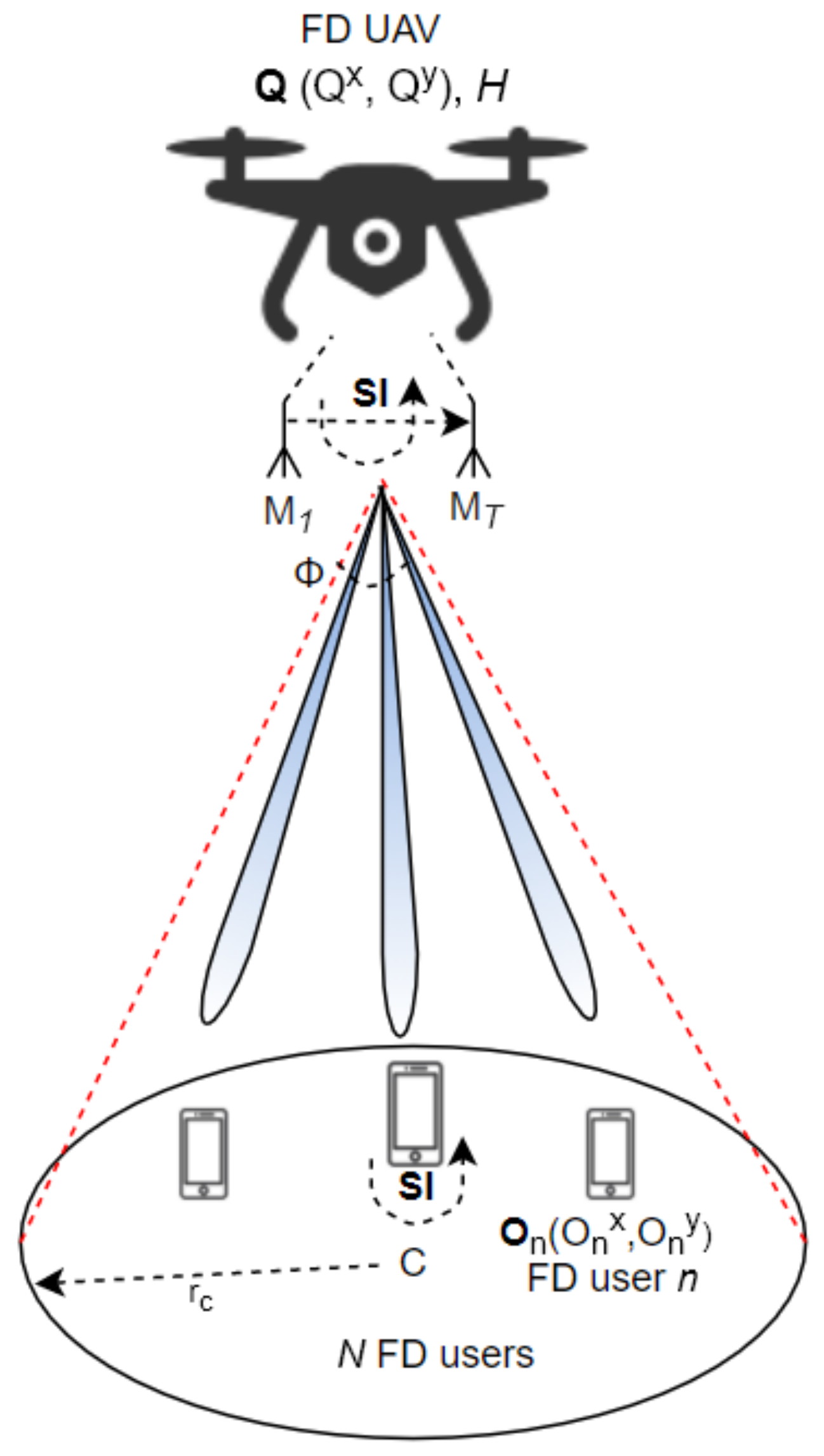
- We consider adjustable beamwidth antennas on the FD MIMO UAV in a multi-user aerial network where the users have FD capability and propose a novel optimization problem to optimize the UAV’s coverage area with resource allocation;
- We propose a computationally-efficient solution for transmit beamforming from FD MIMO UAV towards the single antenna FD users by utilizing a zero-forcing (ZF) approach;
- We found that the UL power optimization in a multi-user FD aerial network leads to a non-convexity in the optimization problem due to co-channel interference;
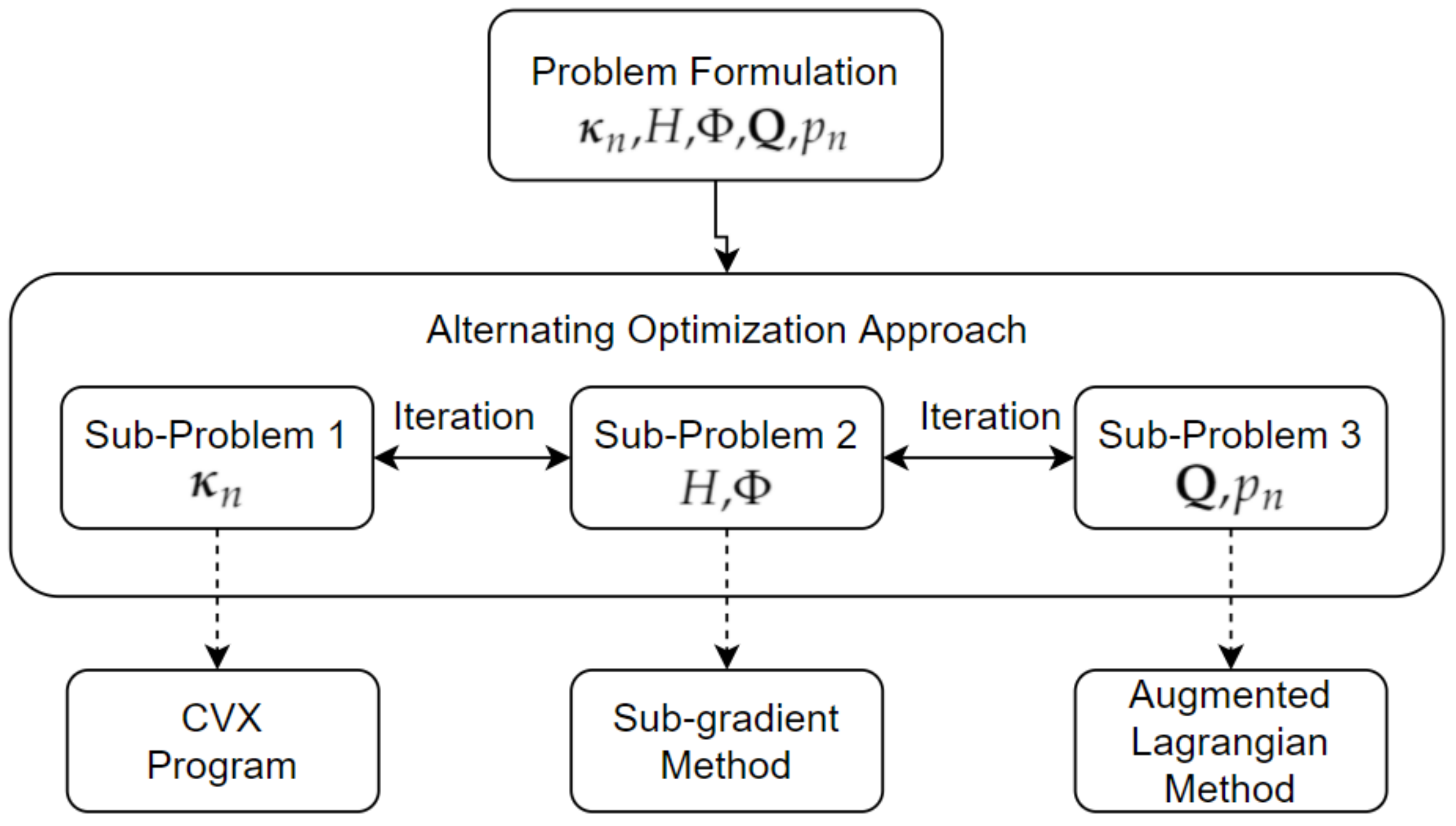
- We proposed a joint optimization solution for the optimization of DL beamformer, coverage area and location of the UAV, and UL power of the users in a multi-user FD aerial network when the objective is to maximize the sum bi-directional FD rate;
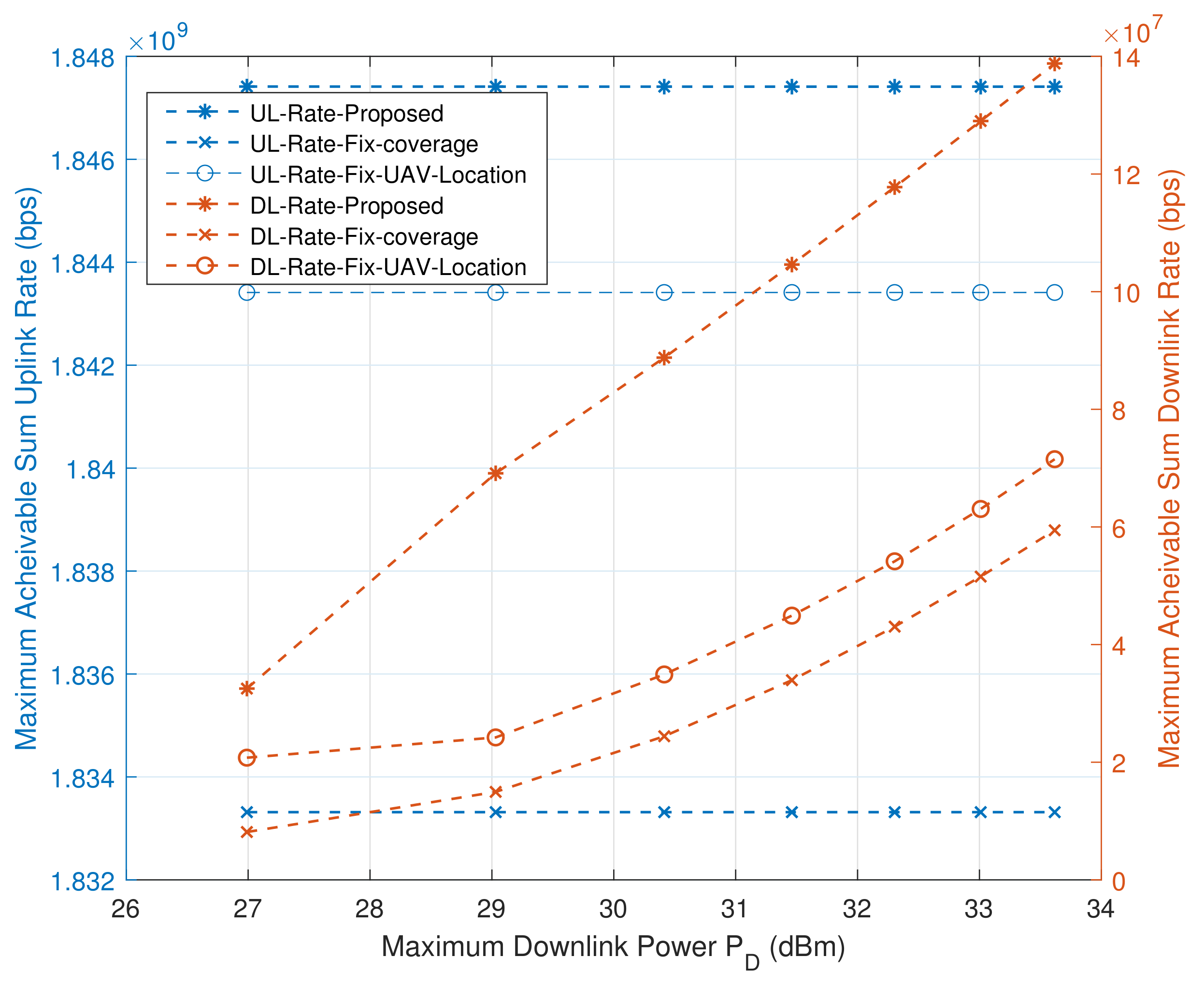
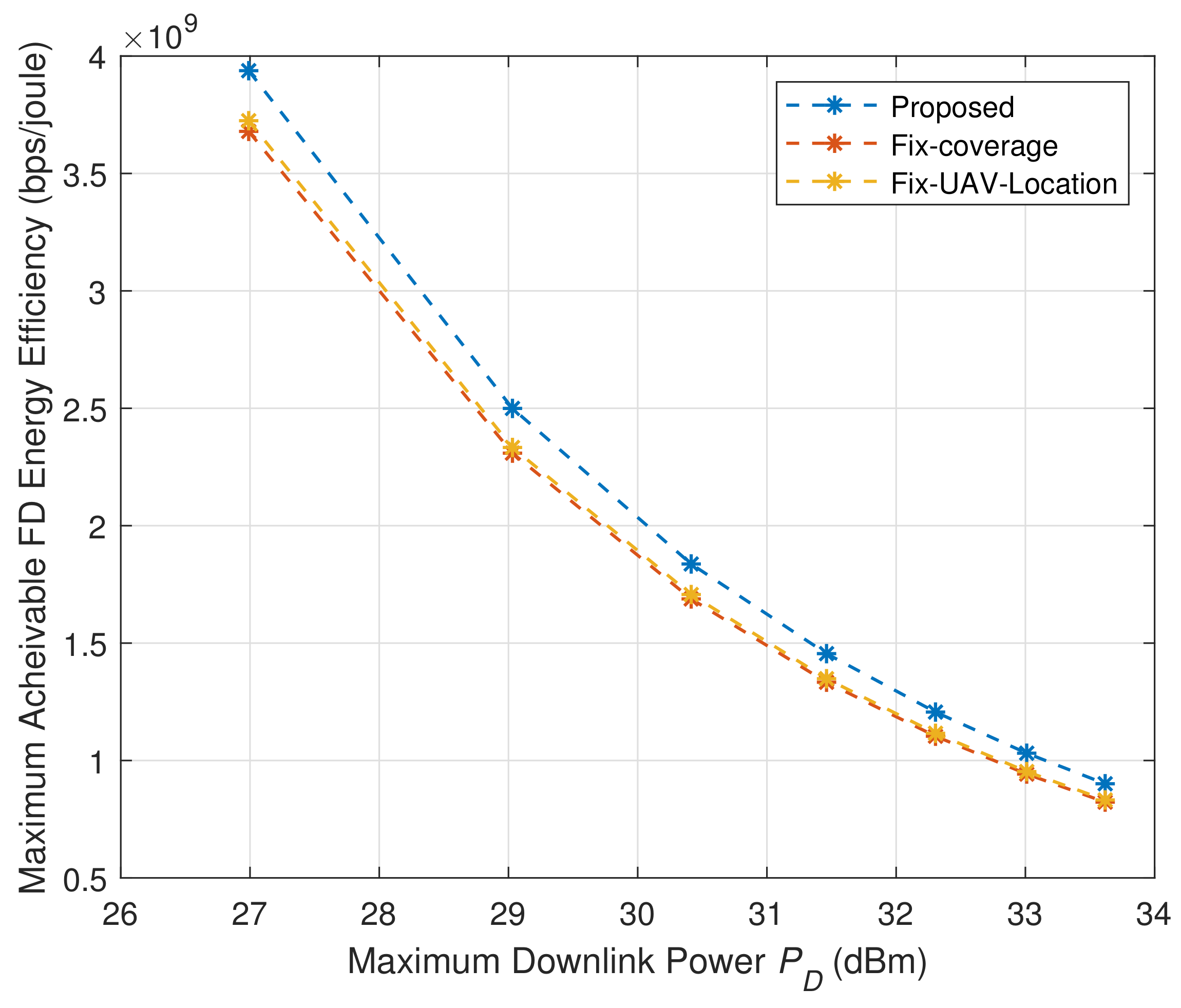
- Numerical results show that the proposed solution to the MOOP achieves better performance compared to the baseline FD algorithms. Similarly, FD functionality in the proposed system model provides notable performance improvement over a HD system.
2. System Model
2.1. System Model
2.2. Channel Model and Performance Metrics
3. Proposed MOOP Formulation
4. Solution of the MOOP
4.1. Optimal Downlink Beamformer
4.2. Optimal Coverage (Altitude and Beamwidth)
4.3. Optimal UAV Location and Uplink Power
4.4. Proposed Joint Optimization Algorithm
| Algorithm 1: Proposed Solution for Joint Optimization |
|
4.5. Complexity and Convergence Analysis
5. Numerical Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef] [Green Version]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. IEEE Commun. Surv. Tutor. 2019, 21, 2334–2360. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Zeng, Y.; Zhang, R. Joint trajectory and communication design for multi-UAV enabled wireless networks. IEEE Trans. Wirel. Commun. 2018, 17, 2109–2121. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Zhang, H.; He, Q.; Bian, K.; Song, L. Joint trajectory and power optimization for UAV relay networks. IEEE Commun. Lett. 2017, 22, 161–164. [Google Scholar] [CrossRef]
- He, H.; Zhang, S.; Zeng, Y.; Zhang, R. Joint altitude and beamwidth optimization for UAV-enabled multiuser communications. IEEE Commun. Lett. 2017, 22, 344–347. [Google Scholar] [CrossRef] [Green Version]
- Saeed, A.; Gurbuz, O. Joint power and beamwidth optimization for full duplex millimeter wave indoor wireless systems. In Proceedings of the 2019 IEEE Wireless Communications and Networking Conference (WCNC), Marrakesh, Morocco, 15–18 April 2019; pp. 1–6. [Google Scholar]
- Cisco Visual Networking Index: Global Mobile Data Traffic Forecast Update, 2012–2017. February 2013. Available online: http://www.cisco.com (accessed on 1 October 2021).
- Choi, J.I.; Jain, M.; Srinivasan, K.; Levis, P.; Katti, S. Achieving single channel, full duplex wireless communication. In Proceedings of the Sixteenth Annual International Conference on Mobile Computing and Networking, Chicago, IL, USA, 20–24 September 2010; pp. 1–12. [Google Scholar]
- Aryafar, E.; Keshavarz-Haddad, A. PAFD: Phased array full-duplex. In Proceedings of the IEEE Conference on Computer Communications (INFOCOM), Honolulu, HI, USA, 15–19 April 2018; pp. 261–269. [Google Scholar]
- Aryafar, E.; Khojastepour, M.A.; Sundaresan, K.; Rangarajan, S.; Chiang, M. MIDU: Enabling MIMO full duplex. In Proceedings of the ACM 18th Annual International Conference on Mobile Computing and Networking (MobiCom), Istanbul, Turkey, 22–26 August 2012; pp. 257–268. [Google Scholar]
- Hua, M.; Wang, Y.; Zhang, Z.; Li, C.; Huang, Y.; Yang, L. Outage probability minimization for low-altitude UAV-enabled full-duplex mobile relaying systems. China Commun. 2018, 15, 9–24. [Google Scholar] [CrossRef]
- Wang, H.; Wang, J.; Ding, G.; Chen, J.; Li, Y.; Han, Z. Spectrum sharing planning for full-duplex UAV relaying systems with underlaid D2D communications. IEEE J. Sel. Areas Commun. 2018, 36, 1986–1999. [Google Scholar] [CrossRef]
- Hua, M.; Yang, L.; Pan, C.; Nallanathan, A. Throughput maximization for full-duplex UAV aided small cell wireless systems. IEEE Wirel. Commun. Lett. 2019, 9, 475–479. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.H.; Chang, T.H.; Lin, S.C. Transmit-receive beamforming optimization for full-duplex cloud radio access networks. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Chalise, B.K.; Suraweera, H.A.; Zheng, G.; Karagiannidis, G.K. Beamforming optimization for full-duplex wireless-powered MIMO systems. IEEE Trans. Commun. 2017, 65, 3750–3764. [Google Scholar] [CrossRef] [Green Version]
- Song, Q.; Zheng, F.C.; Zeng, Y.; Zhang, J. Joint beamforming and power allocation for UAV-enabled full-duplex relay. IEEE Trans. Veh. Technol. 2018, 68, 1657–1671. [Google Scholar] [CrossRef]
- Kim, J.; Choi, W.; Park, H. Beamforming for full-duplex multiuser MIMO systems. IEEE Trans. Veh. Technol. 2016, 66, 2423–2432. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Ng, D.W.K.; Schober, R. Multi-objective optimization for power efficient full-duplex wireless communication systems. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Gazestani, A.H.; Ghorashi, S.A.; Yang, Z.; Shikh-Bahaei, M. Joint optimization of power and location in full-duplex UAV enabled systems. IEEE Syst. J. 2020. [Google Scholar] [CrossRef]
- Yu, Y.; Tang, J.; Huang, J.; Zhang, X.; So, D.K.C.; Wong, K.K. Multi-objective optimization for UAV-assisted wireless powered IoT networks based on extended DDPG algorithm. IEEE Trans. Commun. 2021, 69, 6361–6374. [Google Scholar] [CrossRef]
- Li, B.; Zhang, R.; Yang, L. Joint user scheduling and UAV trajectory optimization for full-duplex UAV relaying. In Proceedings of the IEEE International Conference on Communications (ICC), Montreal, QC, Canada, 14–23 June 2021; pp. 1–6. [Google Scholar]
- Yang, H.; Ye, Y.; Chu, X.; Sun, S. Energy efficiency maximization for UAV-enabled hybrid backscatter-harvest-then-transmit communications. IEEE Trans. Wirel. Commun. 2021. [Google Scholar] [CrossRef]
- Chan, C.; Kam, T. A procedure for power consumption estimation of multi-rotor unmanned aerial vehicle. J. Phys. Conf. Ser. 2020, 1509, 012015. [Google Scholar] [CrossRef]
- Tang, N.; Tang, H.; Li, B.; Yuan, X. Joint maneuver and beamwidth optimization for UAV-enabled multicasting. IEEE Access 2019, 7, 149503–149514. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, Y. Admissibility and robust stabilization of continuous linear singular fractional order systems with the fractional order α: The 0< α< 1 case. ISA Trans. 2018, 82, 42–50. [Google Scholar]
- Zhang, X.; Huang, W. Adaptive neural network sliding mode control for nonlinear singular fractional order systems with mismatched uncertainties. Fractal Fract. 2020, 4, 50. [Google Scholar] [CrossRef]
- Bharadia, D.; McMilin, E.; Katti, S. Full duplex radios. SIGCOMM Comput. Commun. Rev. 2013, 43, 375–386. [Google Scholar] [CrossRef]
- Heath, R.W., Jr.; Lozano, A. Foundations of MIMO Communication; Cambridge University Press: Cambridge, UK, 2018. [Google Scholar]
- Tse, D.; Viswanath, P. Fundamentals of Wireless Communication; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Ngo, H.Q.; Suraweera, H.A.; Matthaiou, M.; Larsson, E.G. Multipair full-duplex relaying with massive arrays and linear processing. IEEE J. Sel. Areas Commun. 2014, 32, 1721–1737. [Google Scholar] [CrossRef] [Green Version]
- Grant, M.; Boyd, S. CVX: Matlab Software for dIsciplined Convex Programming. Version 2.1. 2014. Available online: http://cvxr.com/cvx (accessed on 1 September 2021).
- Luo, Z.Q.; Ma, W.K.; So, A.M.C.; Ye, Y.; Zhang, S. Semidefinite relaxation of quadratic optimization problems. IEEE Signal Process. Mag. 2010, 27, 20–34. [Google Scholar] [CrossRef]
- Timotheou, S.; Krikidis, I.; Zheng, G.; Ottersten, B. Beamforming for MISO interference channels with QoS and RF energy transfer. IEEE Trans. Wirel. Commun. 2014, 13, 2646–2658. [Google Scholar]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Nocedal, J.; Wright, S. Numerical Optimization; Springer: New York, NY, USA, 2006. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hashir, S.M.; Gupta, S.; Megson, G.; Aryafar, E.; Camp, J. Rate Maximization in a UAV Based Full-Duplex Multi-User Communication Network Using Multi-Objective Optimization. Electronics 2022, 11, 401. https://doi.org/10.3390/electronics11030401
Hashir SM, Gupta S, Megson G, Aryafar E, Camp J. Rate Maximization in a UAV Based Full-Duplex Multi-User Communication Network Using Multi-Objective Optimization. Electronics. 2022; 11(3):401. https://doi.org/10.3390/electronics11030401
Chicago/Turabian StyleHashir, Syed Muhammad, Sabyasachi Gupta, Gavin Megson, Ehsan Aryafar, and Joseph Camp. 2022. "Rate Maximization in a UAV Based Full-Duplex Multi-User Communication Network Using Multi-Objective Optimization" Electronics 11, no. 3: 401. https://doi.org/10.3390/electronics11030401
APA StyleHashir, S. M., Gupta, S., Megson, G., Aryafar, E., & Camp, J. (2022). Rate Maximization in a UAV Based Full-Duplex Multi-User Communication Network Using Multi-Objective Optimization. Electronics, 11(3), 401. https://doi.org/10.3390/electronics11030401