
Diagnosis and Fault Detection of Rotor Bars in Squirrel Cage Induction Motors Using Combined Park’s Vector and Extended Park’s Vector Approaches

 ,
,  ,
, 

Abstract
:1. Introduction
1.1. Motivation and Incitement
1.2. Literature Review
1.3. Contribution
1.4. Organization of the Paper
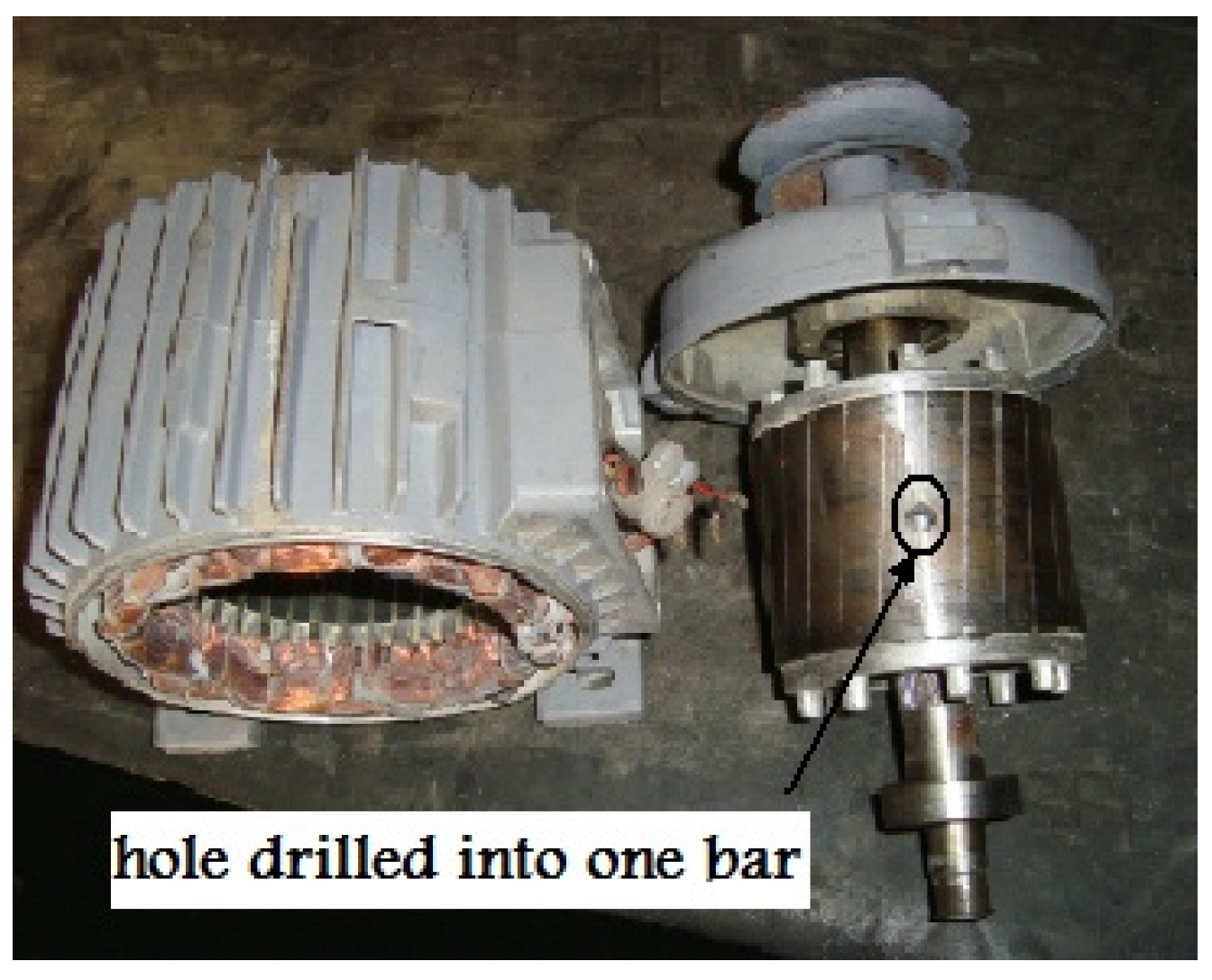
2. Reasons for BRB and End-Ring Breakage
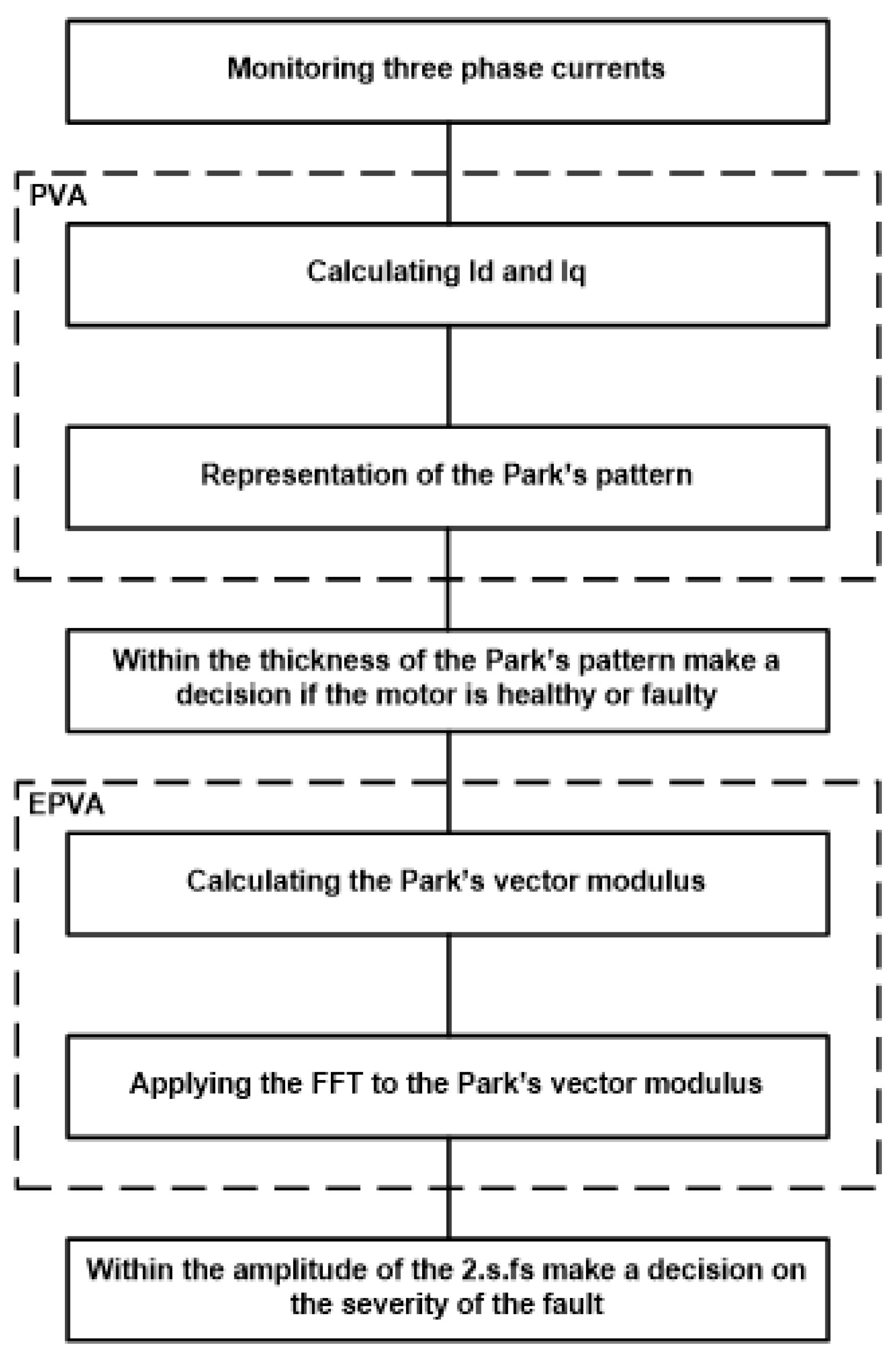
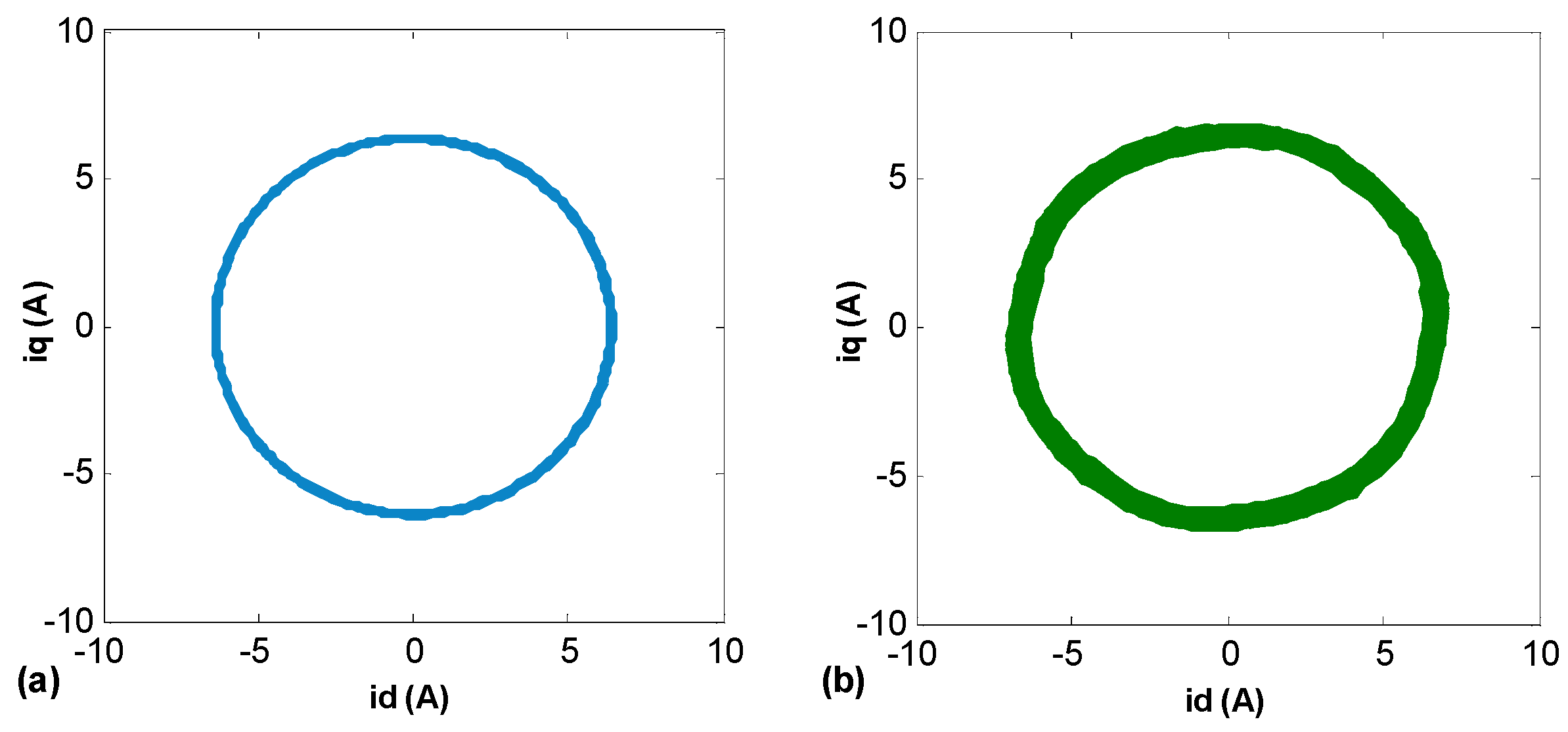
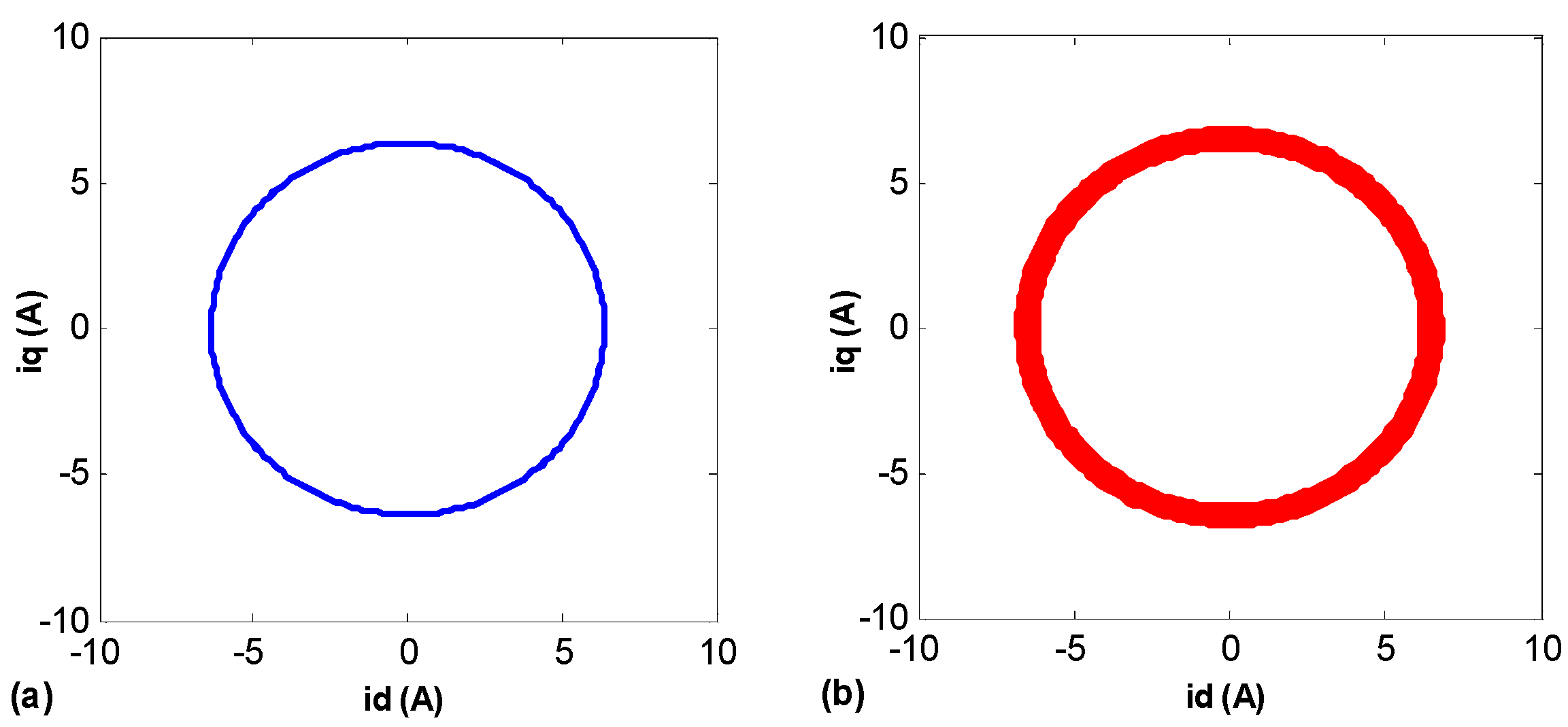
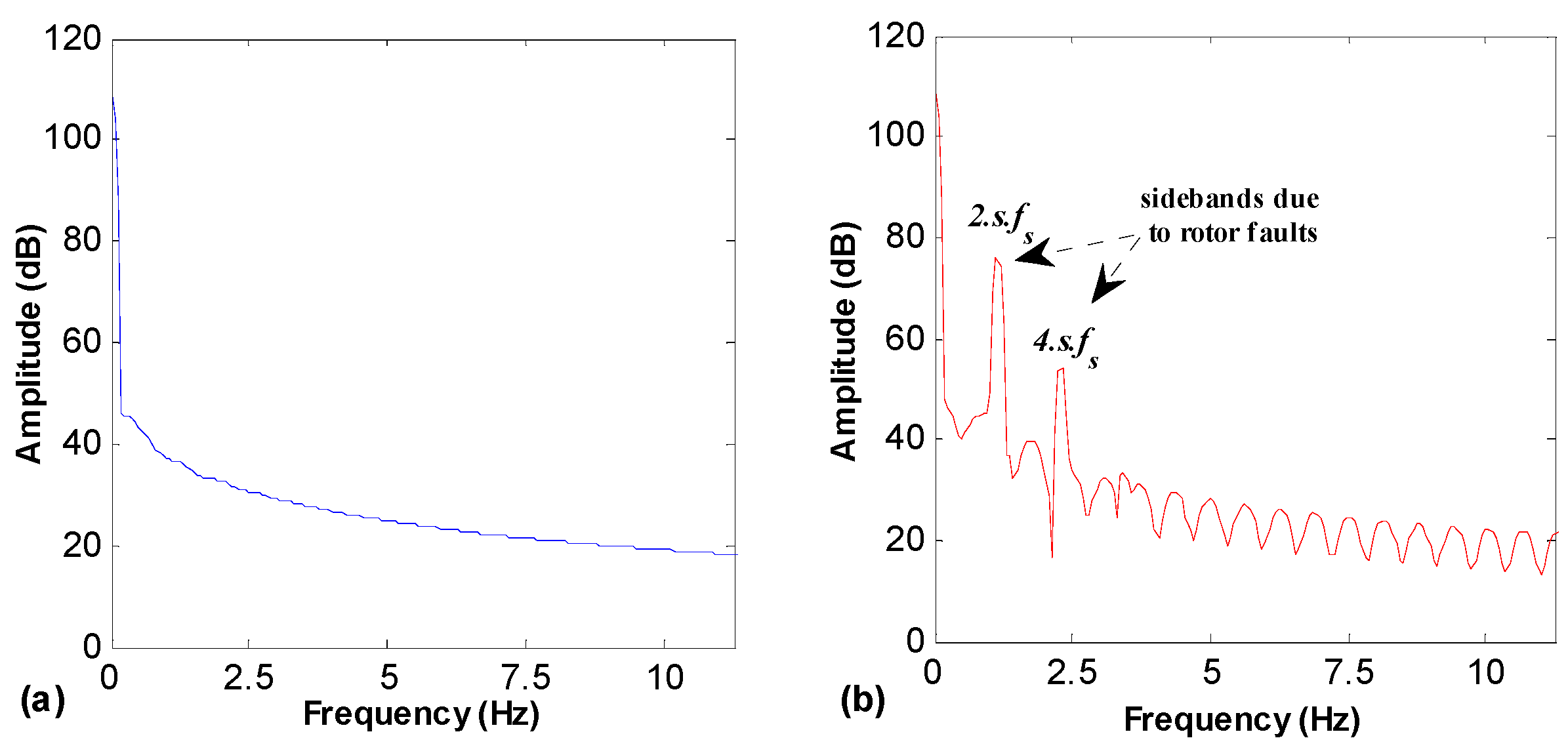
3. Principles of Park’s and Extended Park’s Vector Approaches
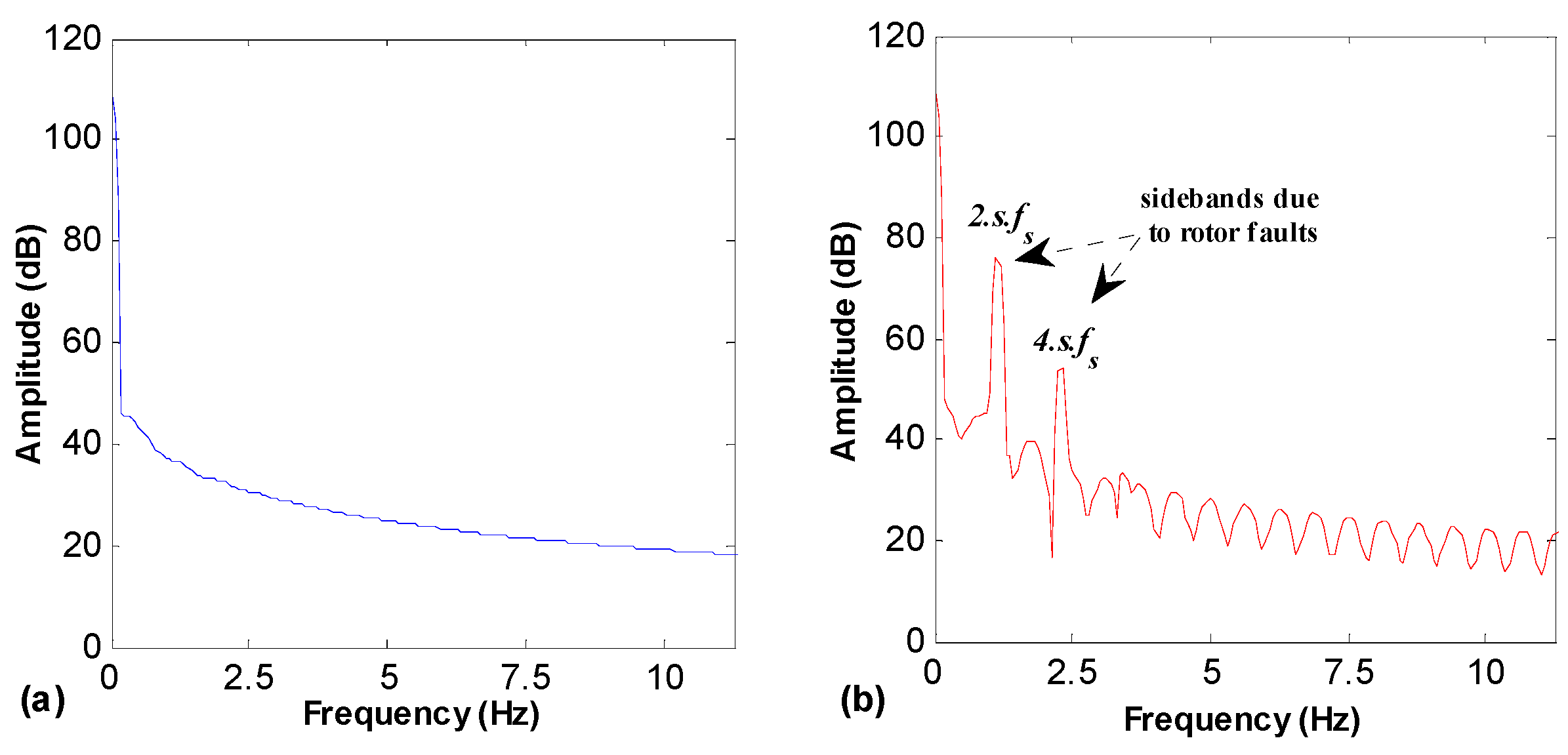
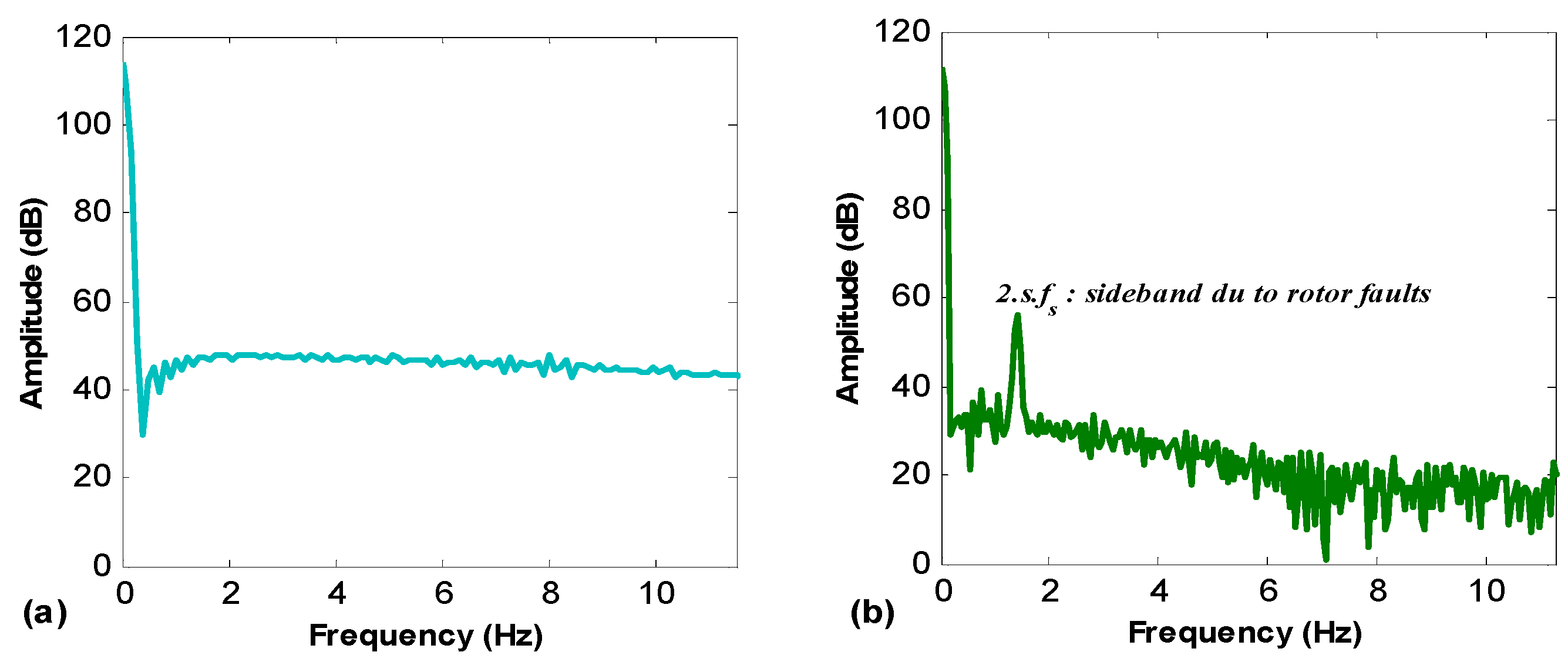
4. Application of the Combined Park’s and the Extended Park’s Vector Approaches for Fault Diagnosis
4.1. Simulation Results
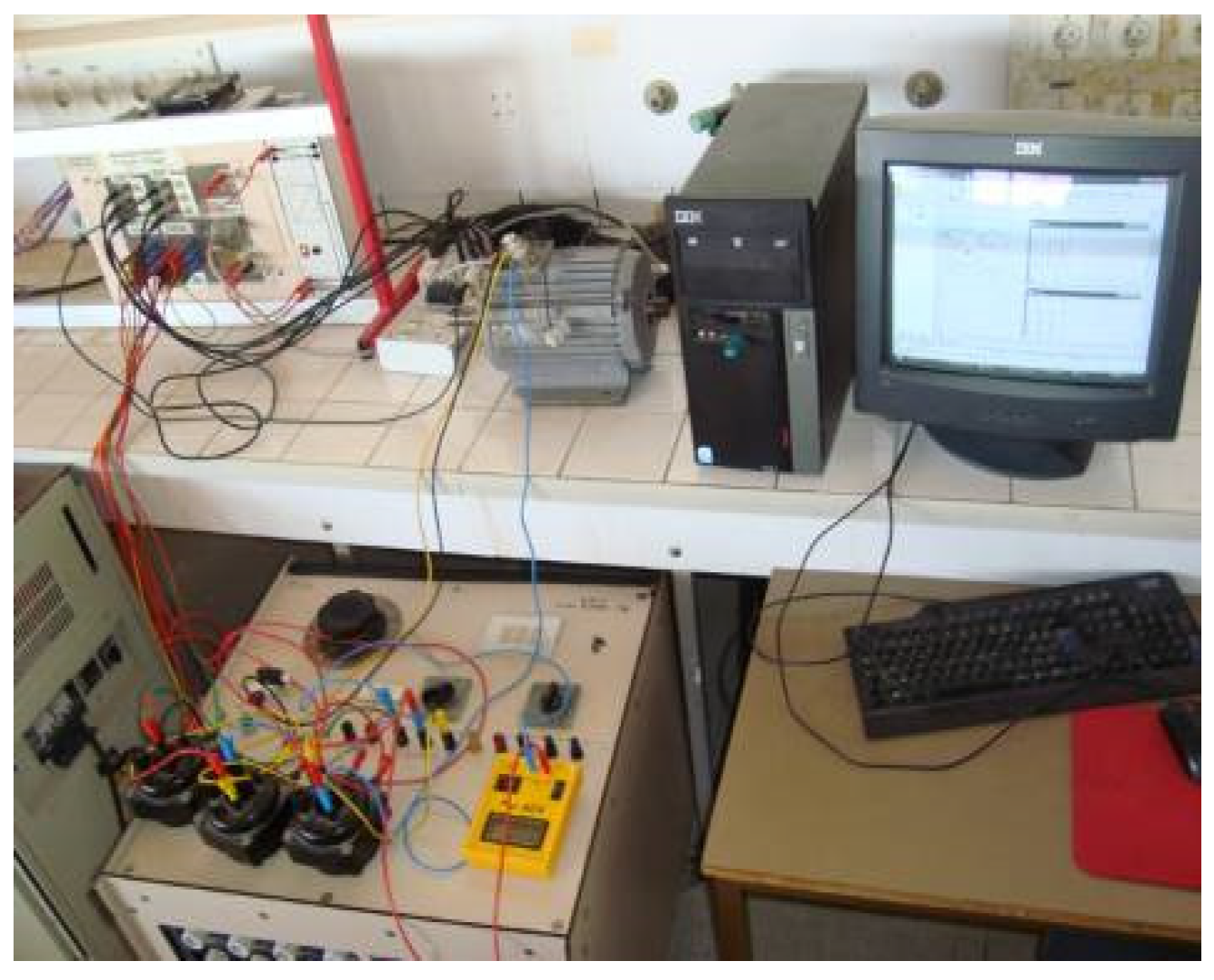
4.2. Experimental Results
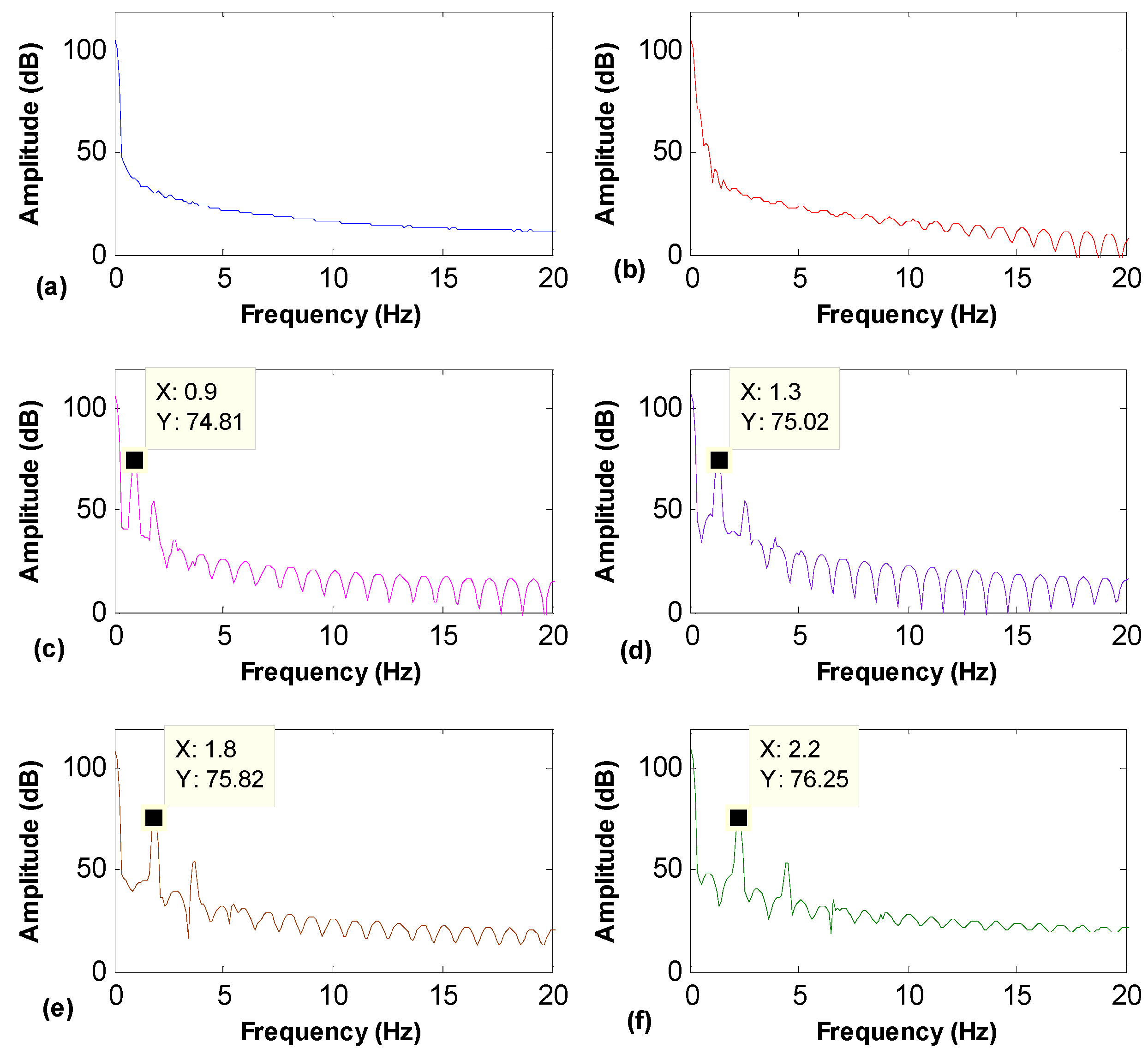
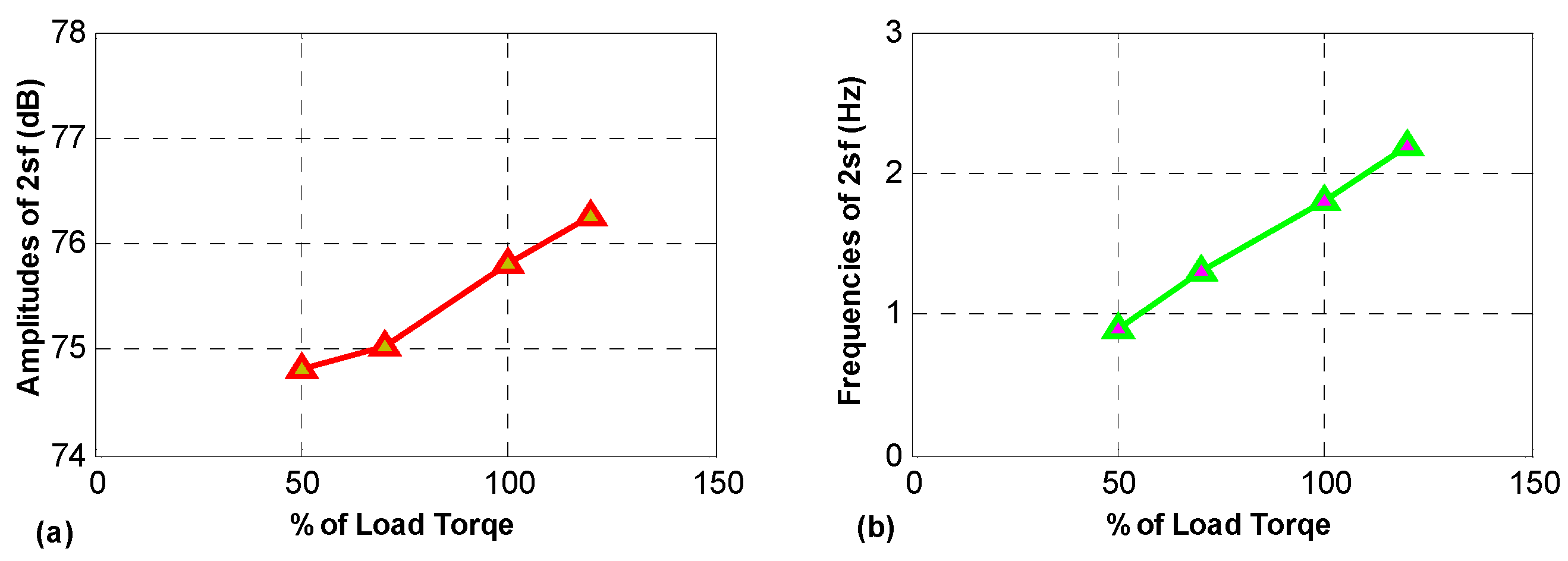
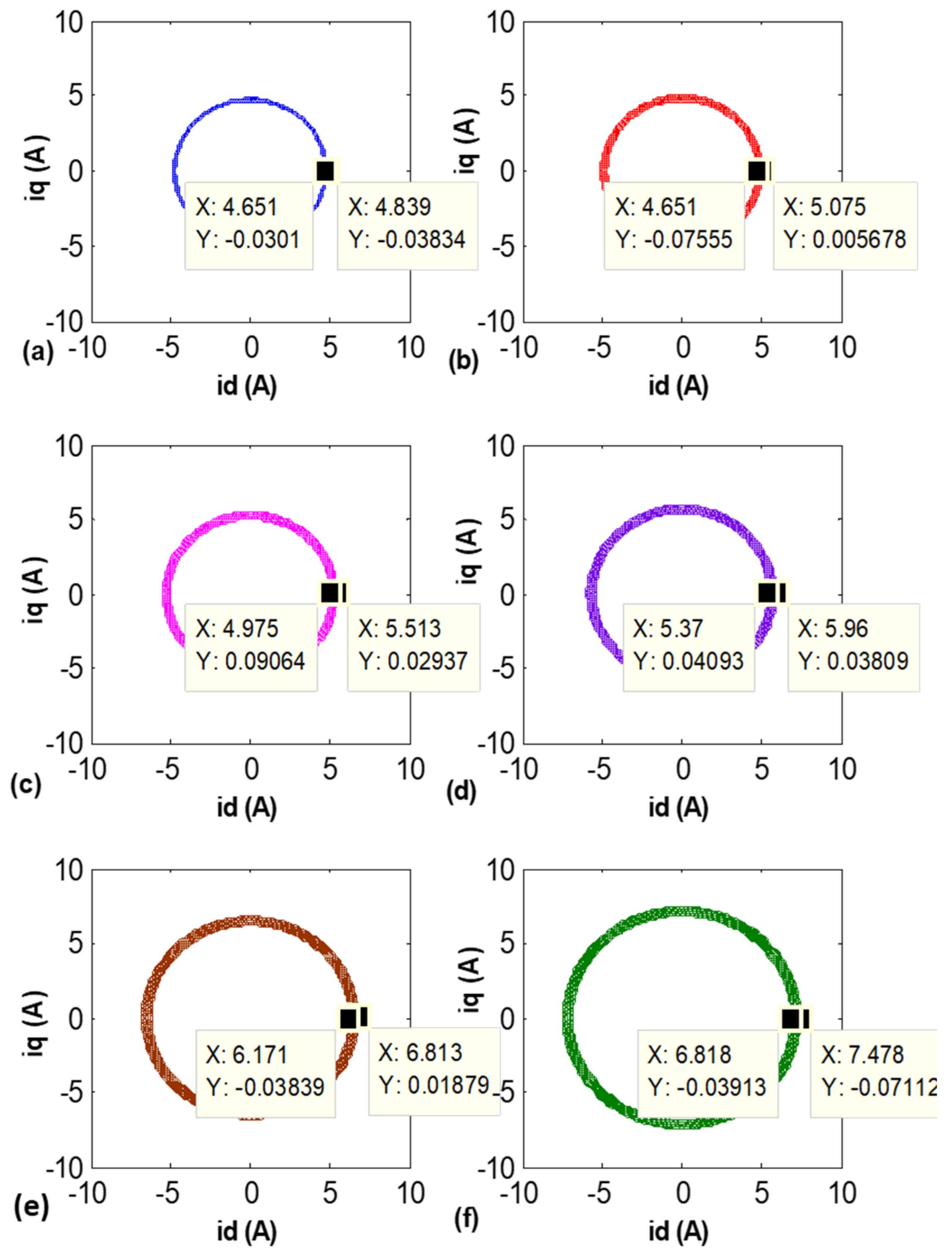
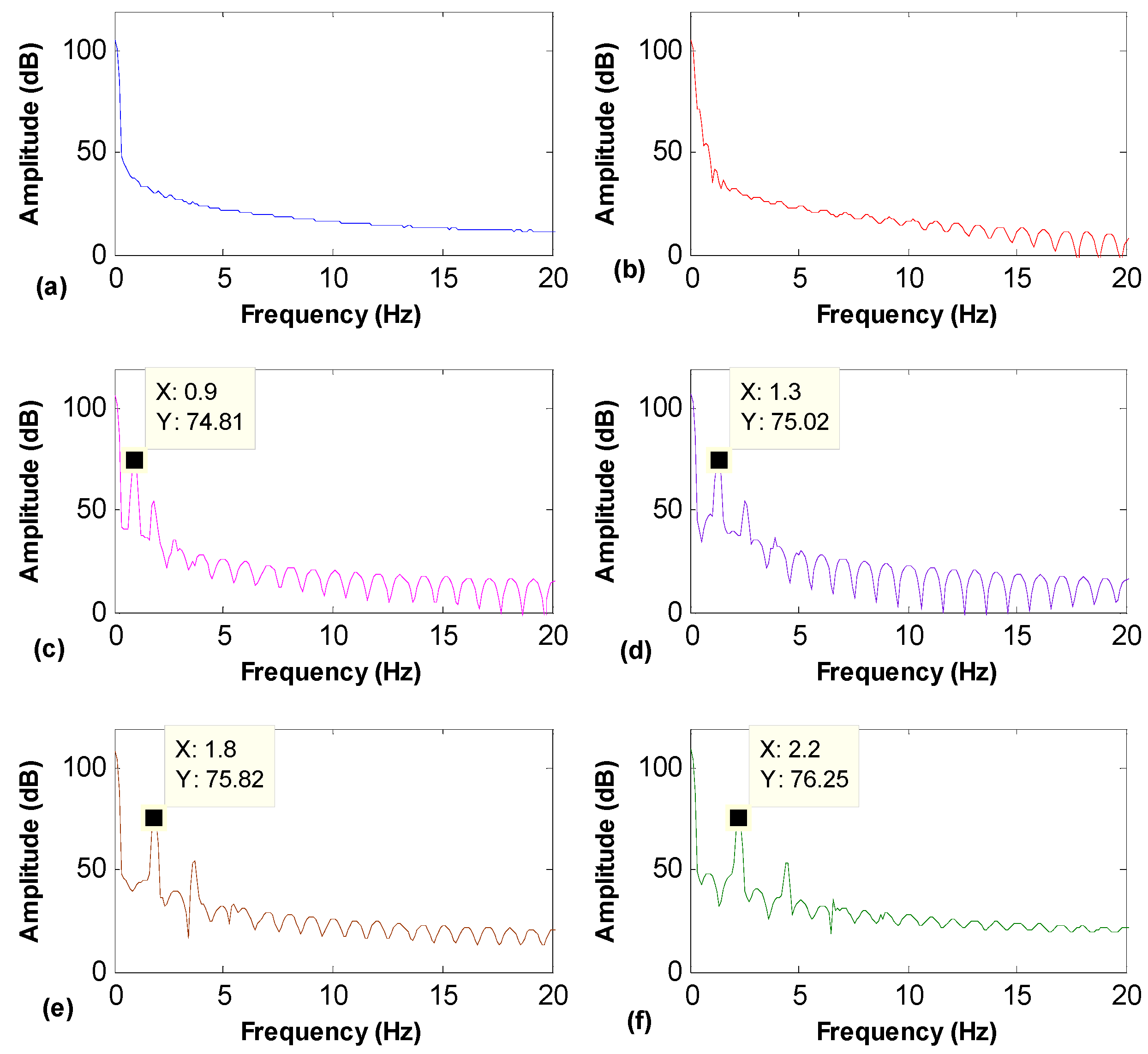
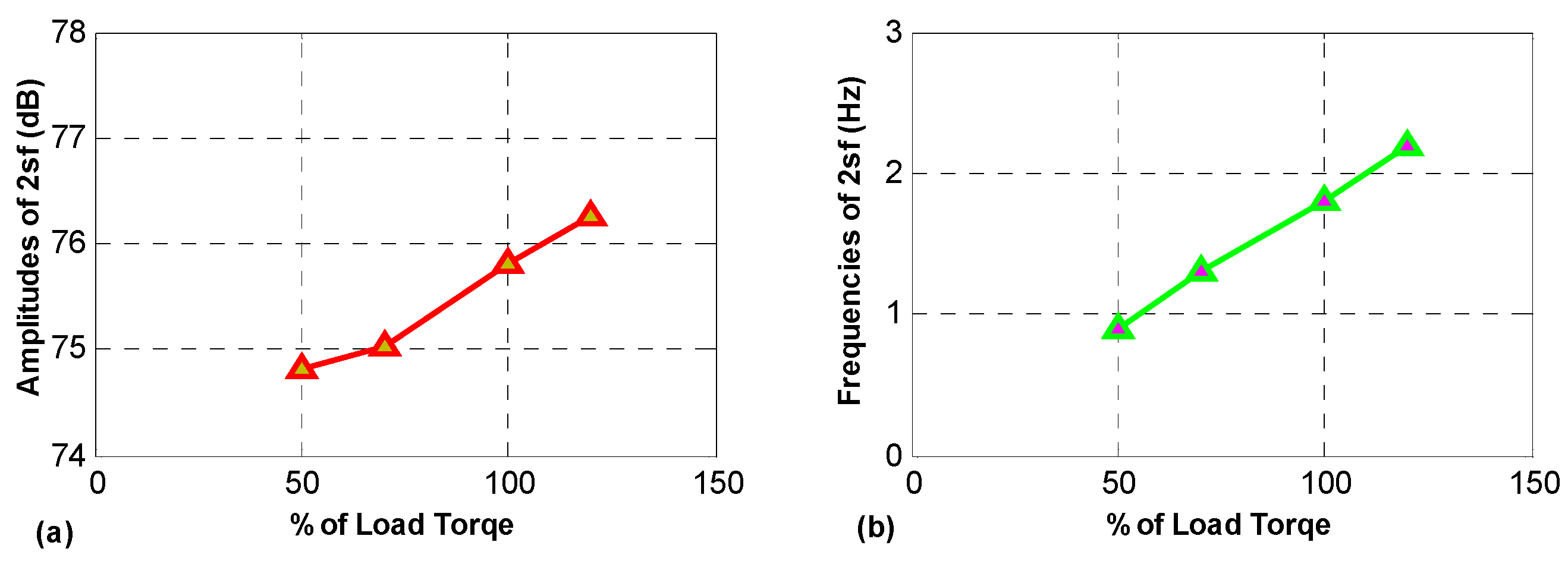
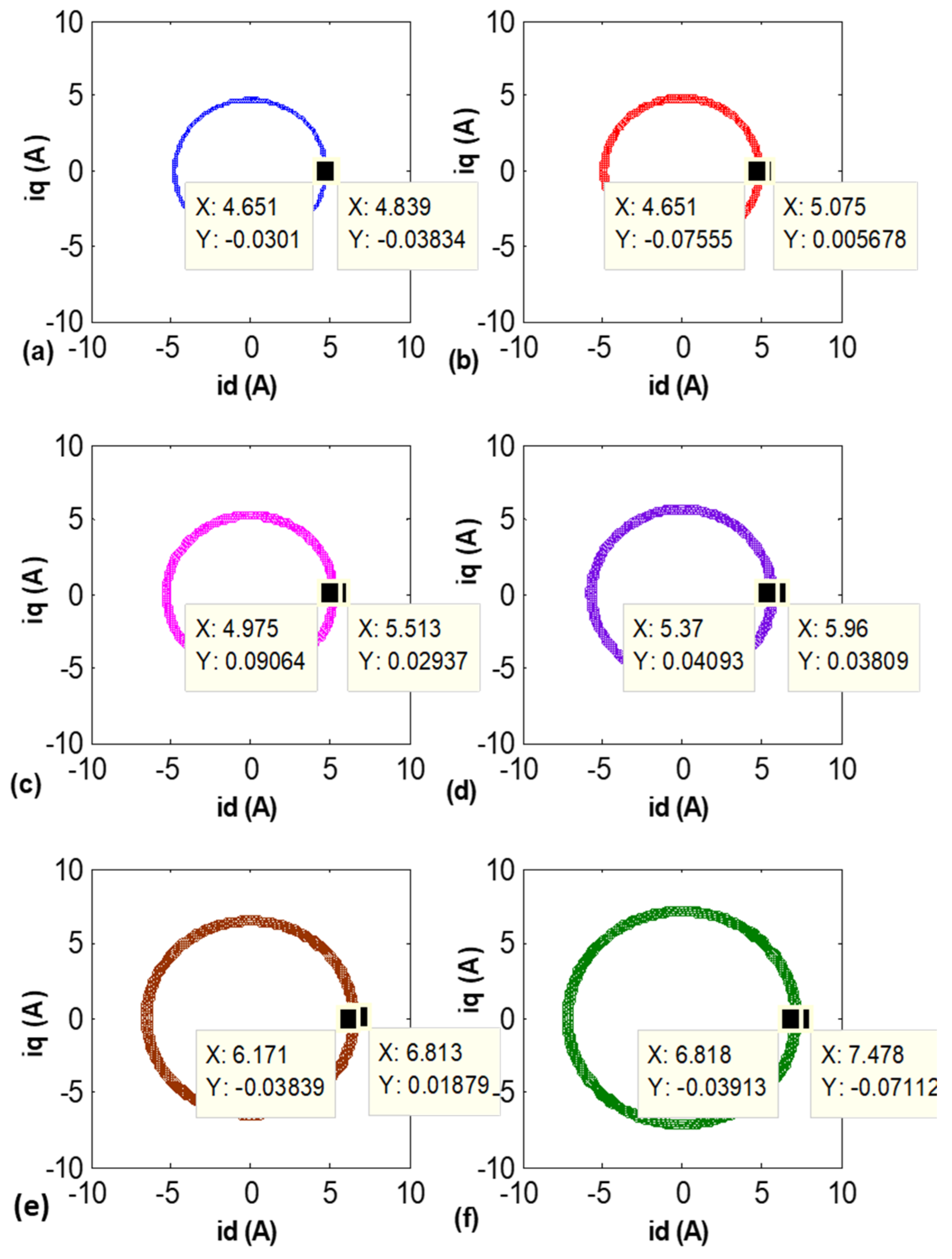
4.3. Influence of the Load Torque Variation on the Rotor Bar Fault Signature
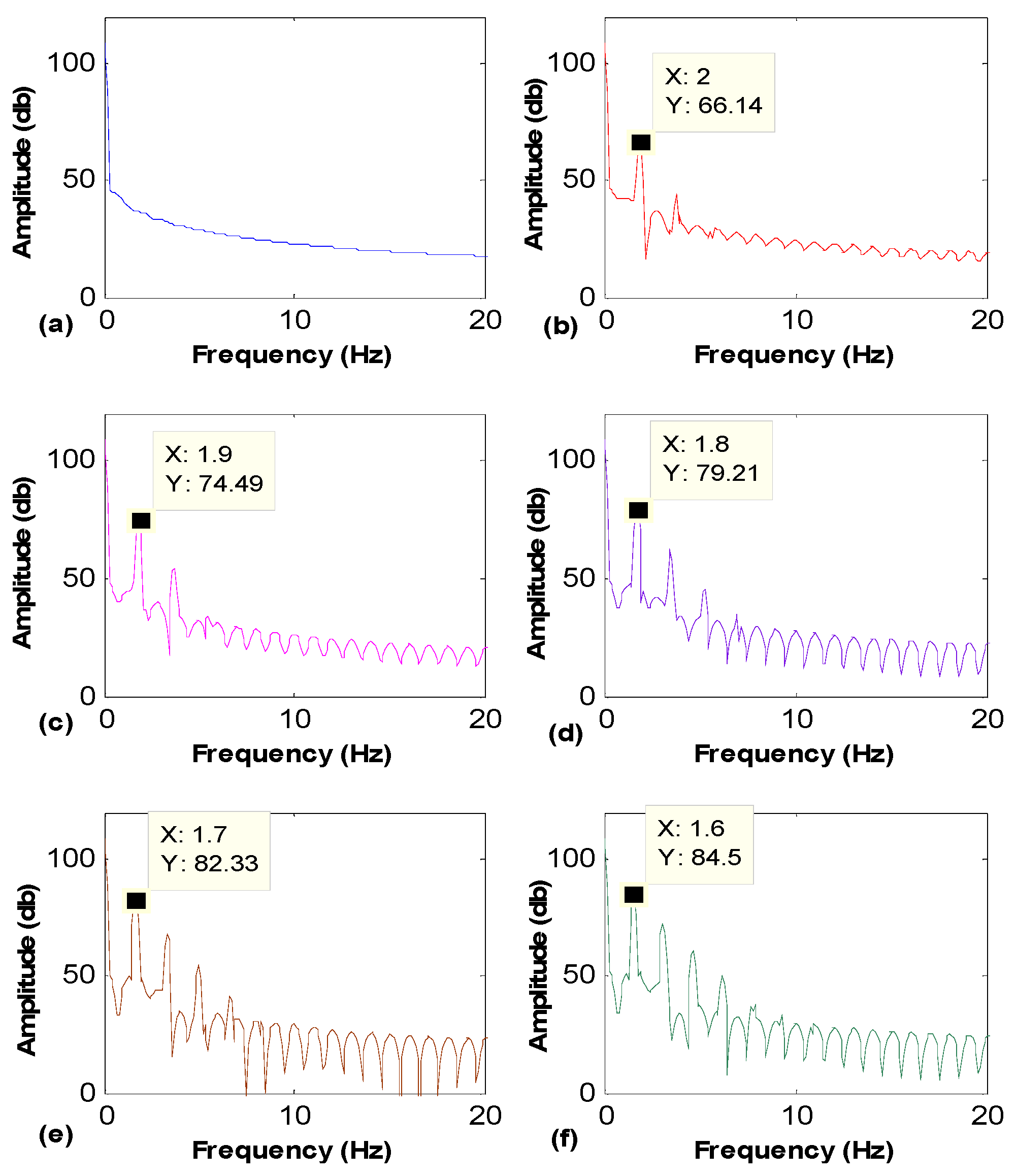
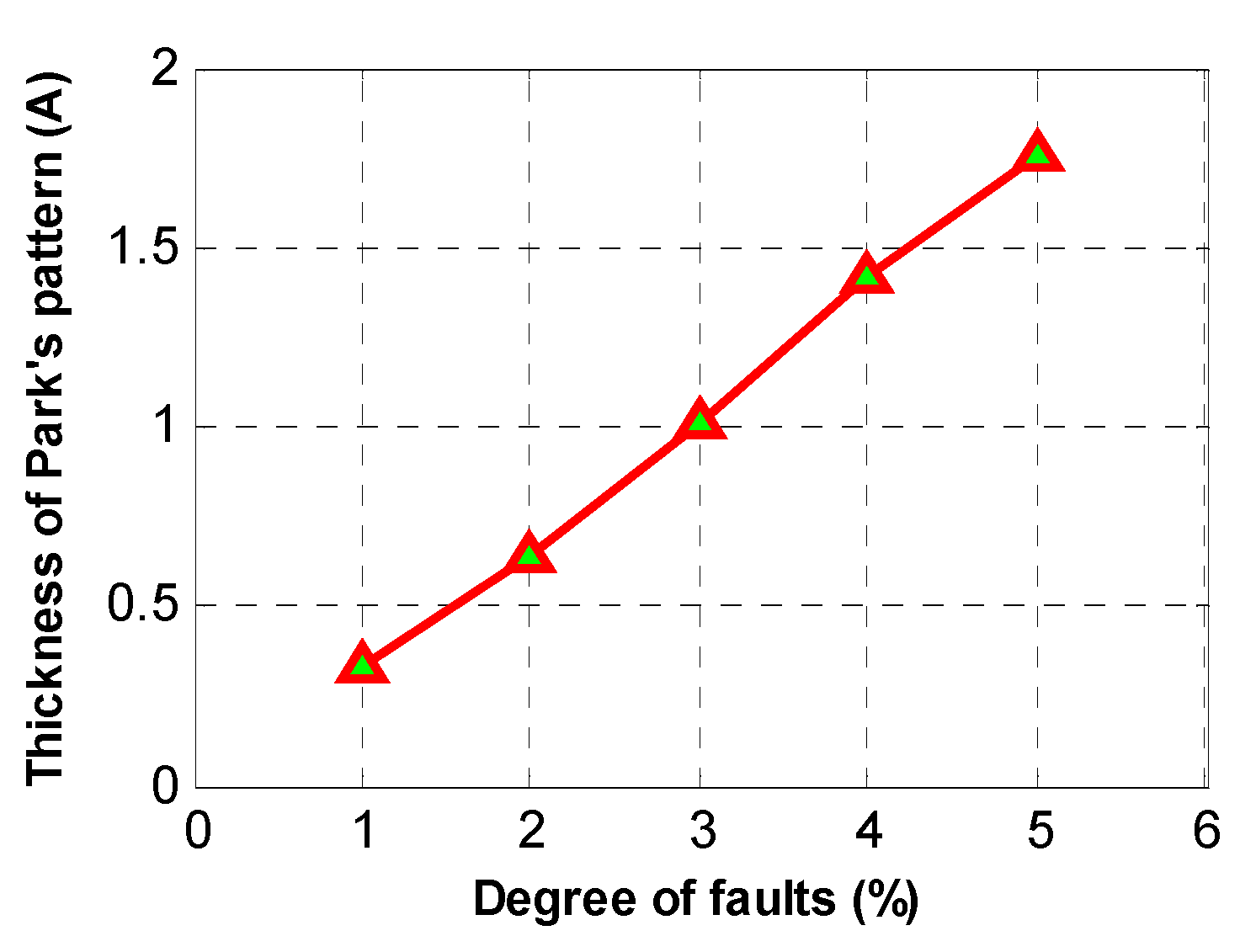
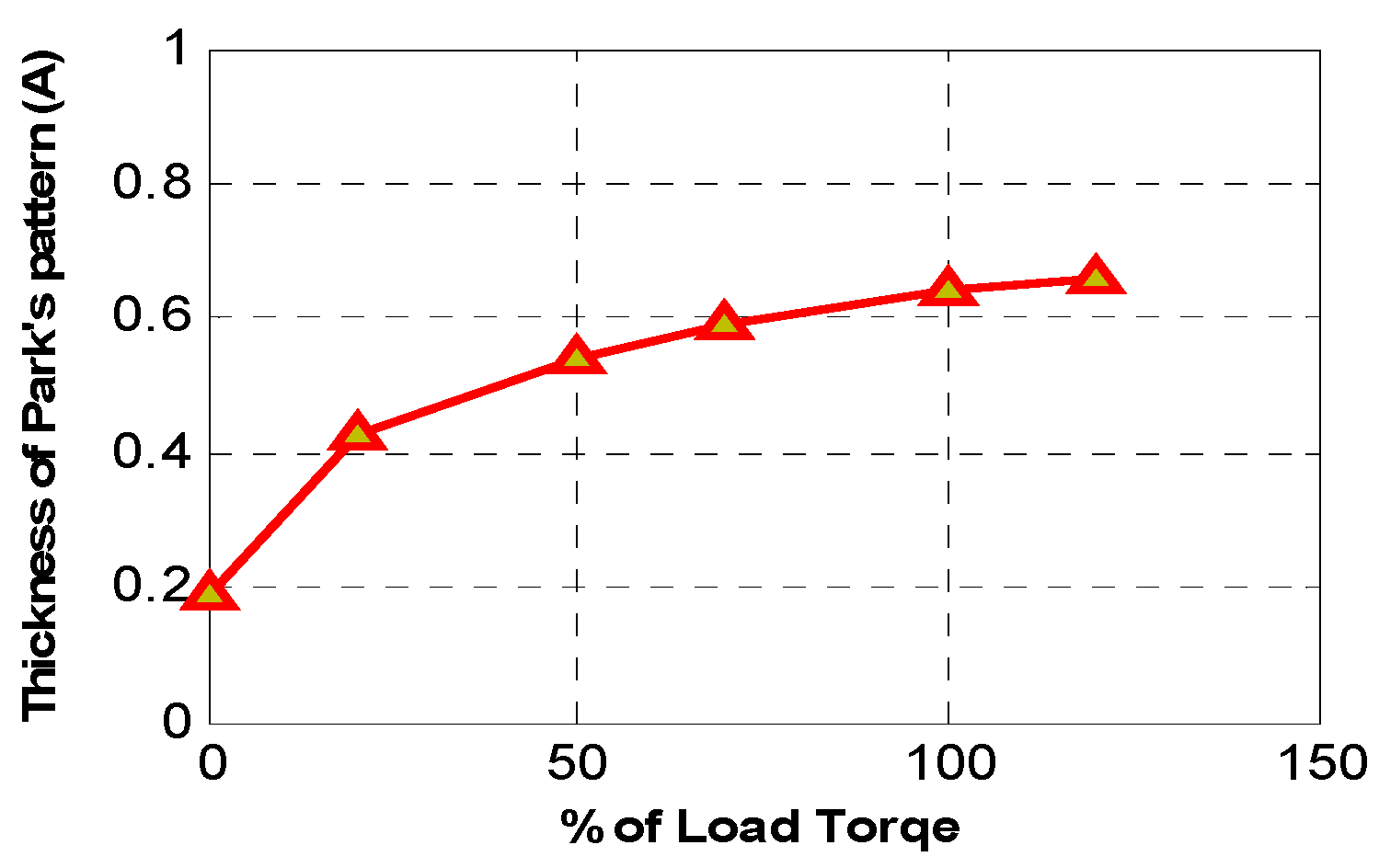
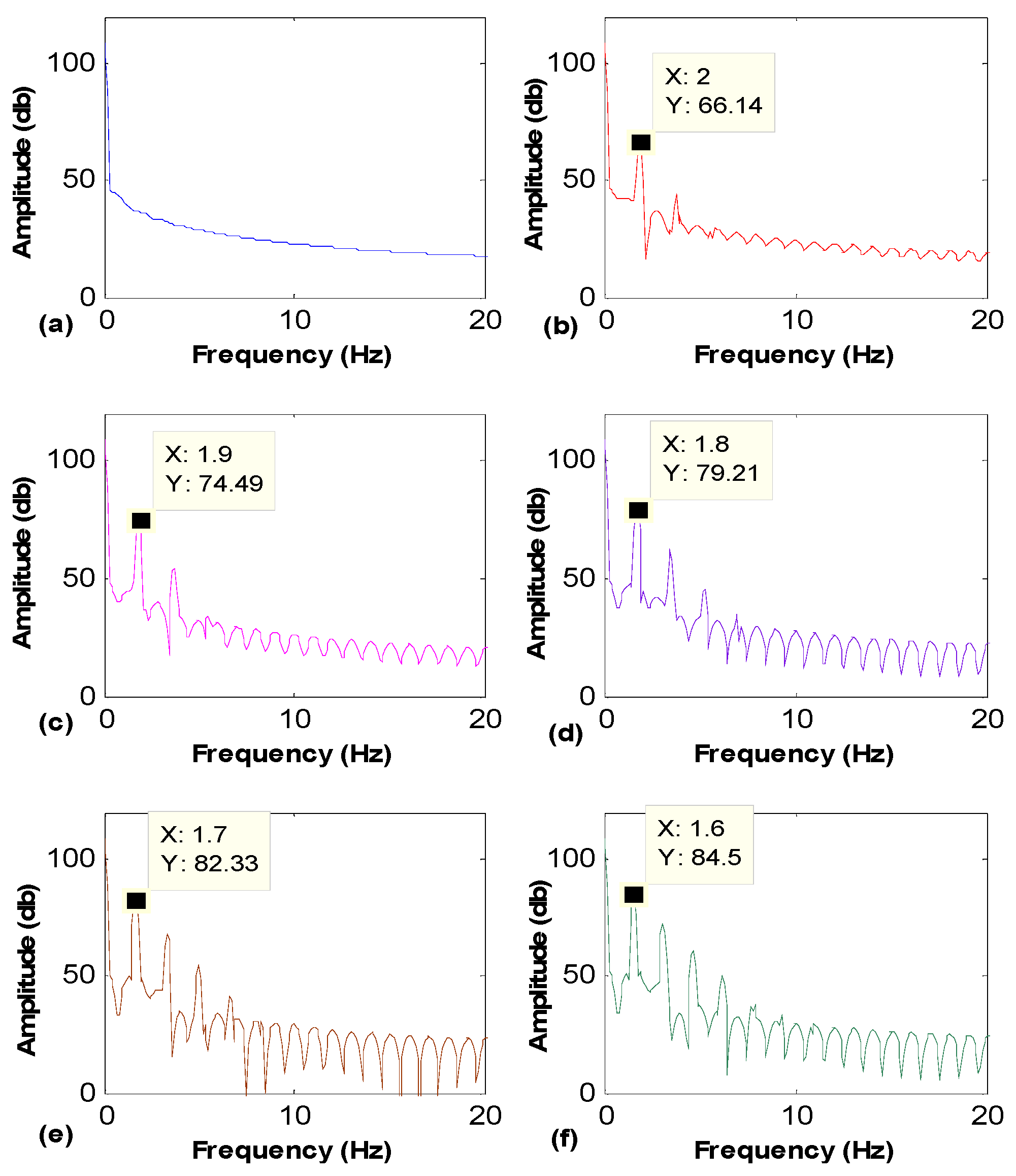
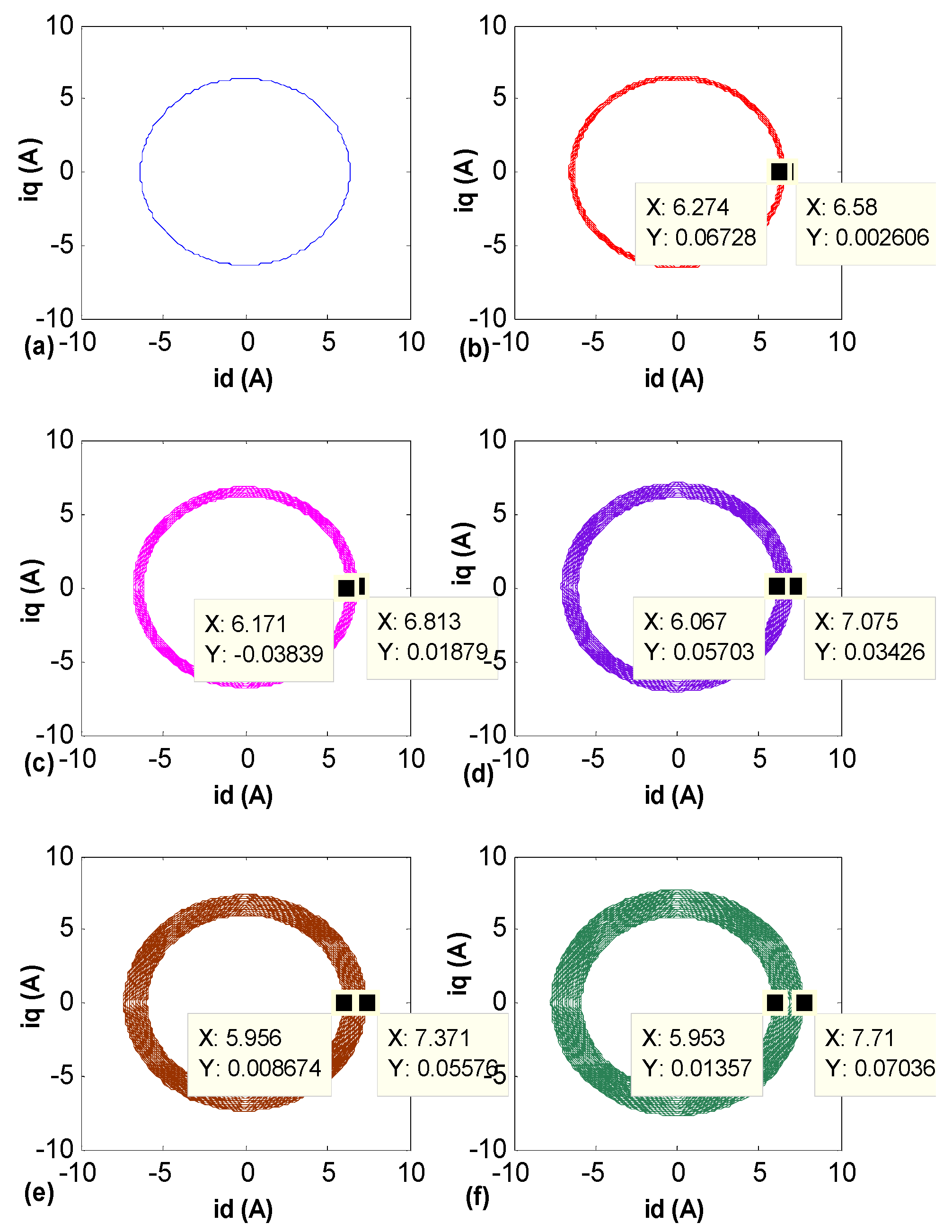
4.4. Influence of Fault’s Degree under Constant Load Condition on the Rotor Bar Fault Signature
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclatures
| Abbreviations | |
| BRB | Broken Rotor Bar |
| CPEPVA | Combined Park’s and Extended Park’s Vector Approach |
| DWT | Discrete Wavelet Transform |
| EPVA | Extended Park’s Vector Approach |
| FFT | Fast Fourier Transform |
| HMCSV | Hilbert Modulus Current Space Vector |
| HPCSV | Hilbert Phase Current Space Vector |
| IM | Induction Motor |
| IMF | Intrinsic Mode Function |
| LS-PMSM | Line Start-Permanent Magnet Synchronous Motor |
| MCSA | Motor Current Signature Analysis |
| MEMS | Micro Electro Mechanical System |
| PVA | Park’s Vector Approach |
| SCIM | Squirrel Cage Induction Motor |
| Parameters and Variables | |
| ias, ibs, ics | Three-phase stator currents, [A] |
| ids, iqs | Quadratic and direct stator currents components, respectively, [A] |
| Imax | Maximum value of the supply phase current, [A] |
| fs | Angular supply frequency, [rad/s] |
| ωs | Ordinary supply frequency, [s−1] |
| t | Time variable, [s] |
| s | Motor slip |
| if | Maximum value of the fundamental supply current, [A] |
| il | Maximum value of the current’s lower sideband component, [A] |
| iu | Maximum value of the current’s upper sideband component, [A] |
| θf | Initial phase angle for the fundamental supply current, [rad] |
| θl | Initial phase angle for the current’s lower sideband component, [rad] |
| θu | Initial phase angle for the current’s upper sideband component, respectively, [rad] |
References
- Cardoso, A.J.M.; Cruz, S.M.A.; Fonseca, D.S.B. Inter-Turn Stator Winding Fault Diagnosis in Three-phase Induction Motors, by Park’s Vector Approach. IEEE Trans. Energy Conv. 1999, 14, 595–598. [Google Scholar] [CrossRef]
- Benbouzid, M. A review of induction motors signature analysis as a medium for faults detection. IEEE Trans. Indust. Electron. 2000, 47, 984–993. [Google Scholar] [CrossRef] [Green Version]
- Cruz, S.M.A.; Cardoso, A.J.M. Rotor Cage Fault Diagnosis in Three-Phase Induction Motors by Extended Park’s Vector Approach. Electric Mach. Power Syst. 2000, 28, 289–299. [Google Scholar]
- Nandi, S.; Toliyat, H.A.; Li, X. Condition Monitoring and Fault Diagnosis of Electrical Motors-A Review. IEEE Trans. Energy Conv. 2005, 20, 719–729. [Google Scholar] [CrossRef]
- Gu, F.; Yesilyurt, I.; Li, Y.; Harris, G.; Ball, A. An investigation of the effects of measurement noise in the use of instantaneous angular speed for machine diagnosis. Mech. Syst. Signal Proc. 2006, 20, 1444–1460. [Google Scholar] [CrossRef]
- Casimir, R.; Boutleux, E.; Clerc, G.; Yahoui, A. The use of features selection and nearest neighbours rule for faults diagnostic in induction motors. Eng. Appl. Artif. Intell. 2006, 19, 169–177. [Google Scholar] [CrossRef]
- Didier, G.; Ternisien, E.; Caspary, O.; Razik, H. A new approach to detect broken rotor bars in induction machines by current spectrum analysis. Mech. Syst. Signal Proc. 2007, 21, 1127–1142. [Google Scholar] [CrossRef] [Green Version]
- Messaoudi, M.; Sbita, L.; Abdelkrim, M.N. Faults Detection in Induction Motor via Stator Current Spectrum Analysis. In Proceedings of the ICEEDT’07 International Conference on Electrical Engineering Design & Technologies, Hammamet, Tunisia, 4–6 November 2007. [Google Scholar]
- Serrano, P.; Zamarrón, A.; Hernandez, A.; Ochoa, A. Artificial Neural Networks for Diagnosing Stator Induction Motor Faults. Res. Comput. Sci. 2008, 39, 251–262. [Google Scholar]
- Verucchi, C.J.; Acosta, G.G.; Benger, F.A. A Review on fault diagnosis of induction machines. Lat. Am. Appl. Res. 2008, 38, 113–121. [Google Scholar]
- Pezzani, C.M.; Donolo, P.D.; Castellino, A.M.; Bossio, G.R.; De Angelo, C.H. A new approach to the Park’s vector for broken bars and load oscillation diagnosis on IM. In Proceedings of the 2010 IEEE International Conference on Industrial Technology, Via del Mar, Chile, 14–17 March 2010; pp. 1221–1226. [Google Scholar]
- Messaoudi, M.; Sbita, L. Multiple faults diagnosis in induction motor using the MCSA method. Int. J. Signal Image Proc. 2010, 1, 190–195. [Google Scholar]
- Spyropoulos, D.V.; Mitronikas, E.D. Induction motor stator fault diagnosis technique using Park vector approach and complex wavelets. In Proceedings of the 2012 XXth International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; pp. 1730–1734. [Google Scholar]
- Bacha, K.; Salem, S.B.; Chaari, A. An improved combination of Hilbert and Park transforms for fault detection and identification in three-phase induction motors. Int. J. Electr. Power Energy Syst. 2012, 43, 1006–1016. [Google Scholar] [CrossRef]
- Pires, V.F.; Kadivonga, M.; Martins, J.F.; Pires, A.J. Motor square current signature analysis for induction motor rotor diagnosis. Measurement 2013, 46, 942–948. [Google Scholar] [CrossRef]
- Sonje, D.M.; Chowdhury, A.; Kundu, P. Fault diagnosis of induction motor using parks vector approach. In Proceedings of the 2014 International Conference on Advances in Electrical Engineering (ICAEE), Vellore, India, 9–11 January 2014; pp. 1–4. [Google Scholar] [CrossRef]
- Gyftakis, K.N.; Cardoso, A.J.M.; Daviu, J.A.A. Introducing the Filtered Park’s and Filtered Extended Park’s Vector Approach to detect broken rotor bars in IM. Mech. Syst. Signal Proc. 2017, 93, 30–50. [Google Scholar] [CrossRef]
- Delgado-Arredondo, P.A.; Morinigo-Sotelo, D.; Osornio-Rios, R.A.; Avina-Cervantes, J.G.; Rostro-Gonzalez, H.; de Jesus Romero-Troncoso, R. Methodology for fault detection in induction motors via sound and vibration signals. Mech. Syst. Signal Proc. 2017, 83, 568–589. [Google Scholar] [CrossRef]
- Abd-el-Malek, M.B.; Abdelsalam, A.K.; Hassan, O.E. Novel approach using Hilbert Transform for multiple broken rotor bars fault location detection for three phase induction motor. ISA Trans. 2018, 80, 439–457. [Google Scholar] [CrossRef]
- Glowacz, A. Acoustic based fault diagnosis of three-phase induction motor. Appl. Acoust. 2018, 137, 82–89. [Google Scholar] [CrossRef]
- Singh, G.; Naikan, V.N.A. Detection of half broken rotor bar fault in VFD driven induction motor drive using motor square current MUSIC analysis. Mech. Syst. Signal Proc. 2018, 110, 333–348. [Google Scholar] [CrossRef]
- Ameid, T.; Menacer, A.; Talhaoui, H.; Azzoug, Y. Discrete wavelet transform and energy eigen value for rotor bars fault detection in variable speed field-oriented control of induction motor drive. ISA Trans. 2018, 79, 217–231. [Google Scholar] [CrossRef]
- Quiroz, J.C.; Mariun, N.; Mehrjou, M.R.; Izadi, M.; Misron, N.; Radzi, M. Fault detection of broken rotor bar in LS-PMSM using random forests. Measurement 2018, 116, 273–280. [Google Scholar] [CrossRef]
- Guven, Y.; Atis, S. Implementation of an embedded system for real-time detection of rotor bar failures in induction motors. ISA Trans. 2018, 81, 210–221. [Google Scholar] [CrossRef]
- Xie, Y.; Chen, P.; Li, F.; Liu, H. Electromagnetic forces signature and vibration characteristic for diagnosis broken bars in squirrel cage induction motors. Mech. Syst. Signal Proc. 2019, 123, 554–572. [Google Scholar] [CrossRef]
- Rocha, E.M.; Junior, W.; Lucas, K.E.; da Costa Júnior, C.T.; de Carvalho Júnior, J.G.; de Medeiros, P.; Nogueira, F.G. A fuzzy type-2 fault detection methodology to minimize false alarm rate in induction motor monitoring applications. Appl. Soft Comput. 2020, 93, 106373. [Google Scholar] [CrossRef]
- Kumar, P.; Hati, A.S. Deep convolutional neural network based on adaptive gradient optimizer for fault detection in SCIM. ISA Trans. 2021, 111, 350–359. [Google Scholar] [CrossRef] [PubMed]
- Yaman, O. An automated faults classification method based on binary pattern and neighborhood component analysis using induction motor. Measurement 2021, 168, 108323. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Main Factors | Examples of the Factors |
|---|---|
| Thermal factors: |
|
| Environmental factors: |
|
| Magnetic factors: |
|
| Mechanical factors: |
|
| Dynamic factors: |
|
| Residual factors: |
|
| Operating factors: |
|
| Load Torque (%) | 0% | 20% | 50% | 70% | 100% | 120% |
| Amplitudes of 2·s·fs Sideband (dB) | - | - | 74.81 | 75.02 | 75.82 | 76.25 |
| Frequencies of 2·s·fs Sideband (Hz) | - | - | 0.9 | 1.3 | 1.8 | 2.2 |
| Load Torque (%) | 0% | 20% | 50% | 70% | 100% | 120% |
| Thickness of Park’s Vector Pattern (A) | 0.188 | 0.424 | 0.538 | 0.59 | 0.642 | 0.66 |
| Degree of Rotor Faults (%) | 0% | 1% | 2% | 3% | 4% | 5% |
| Amplitudes of 2·s·fs Sidebands (dB) | - | 66.14 | 74.49 | 79.21 | 82.33 | 84.5 |
| frequencies of 2·s·fs Sidebands (Hz) | - | 2 | 1.9 | 1.8 | 1.7 | 1.6 |
| Degree of Rotor Faults (%) | 0% | 1% | 2% | 3% | 4% | 5% |
| Thickness of Park’s Vector Pattern (A) | 0 | 0.333 | 0.642 | 1.008 | 1.415 | 1.757 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Messaoudi, M.; Flah, A.; Alotaibi, A.A.; Althobaiti, A.; Sbita, L.; Ziad El-Bayeh, C. Diagnosis and Fault Detection of Rotor Bars in Squirrel Cage Induction Motors Using Combined Park’s Vector and Extended Park’s Vector Approaches. Electronics 2022, 11, 380. https://doi.org/10.3390/electronics11030380
Messaoudi M, Flah A, Alotaibi AA, Althobaiti A, Sbita L, Ziad El-Bayeh C. Diagnosis and Fault Detection of Rotor Bars in Squirrel Cage Induction Motors Using Combined Park’s Vector and Extended Park’s Vector Approaches. Electronics. 2022; 11(3):380. https://doi.org/10.3390/electronics11030380
Chicago/Turabian StyleMessaoudi, Mustapha, Aymen Flah, Abdullah Alhumaidi Alotaibi, Ahmed Althobaiti, Lassaad Sbita, and Claude Ziad El-Bayeh. 2022. "Diagnosis and Fault Detection of Rotor Bars in Squirrel Cage Induction Motors Using Combined Park’s Vector and Extended Park’s Vector Approaches" Electronics 11, no. 3: 380. https://doi.org/10.3390/electronics11030380
APA StyleMessaoudi, M., Flah, A., Alotaibi, A. A., Althobaiti, A., Sbita, L., & Ziad El-Bayeh, C. (2022). Diagnosis and Fault Detection of Rotor Bars in Squirrel Cage Induction Motors Using Combined Park’s Vector and Extended Park’s Vector Approaches. Electronics, 11(3), 380. https://doi.org/10.3390/electronics11030380