1. Introduction
Harmonic contamination is a major issue in power systems, because of the tremendous usage of power electronic equipment and various non-linear loads in recent years. Harmonic interference adversely affects the power quality under many aspects, such as, given that most of power electronic equipment is non-linear in nature, when used as a load, it draws a non-sinusoidal current from ac sources, hence generating undesirable current harmonics in the supply side, degrading the power quality [
1]. Low power quality may damage the sensitive equipment and cause a huge loss in the industry. Many methods of harmonic mitigation have been studied and suggested by researchers. The passive filter is one of the simplest methods of harmonic compensation. Passive filters are designed using passive storage elements, mainly, inductor and capacitor. Passive filters are simple, reliable and cost effective, but they have major disadvantages, such as resonance problems and static compensation. Because of these drawbacks, active power filters (APFs) have become very popular as power conditioning devices for harmonic and reactive power compensation [
2].
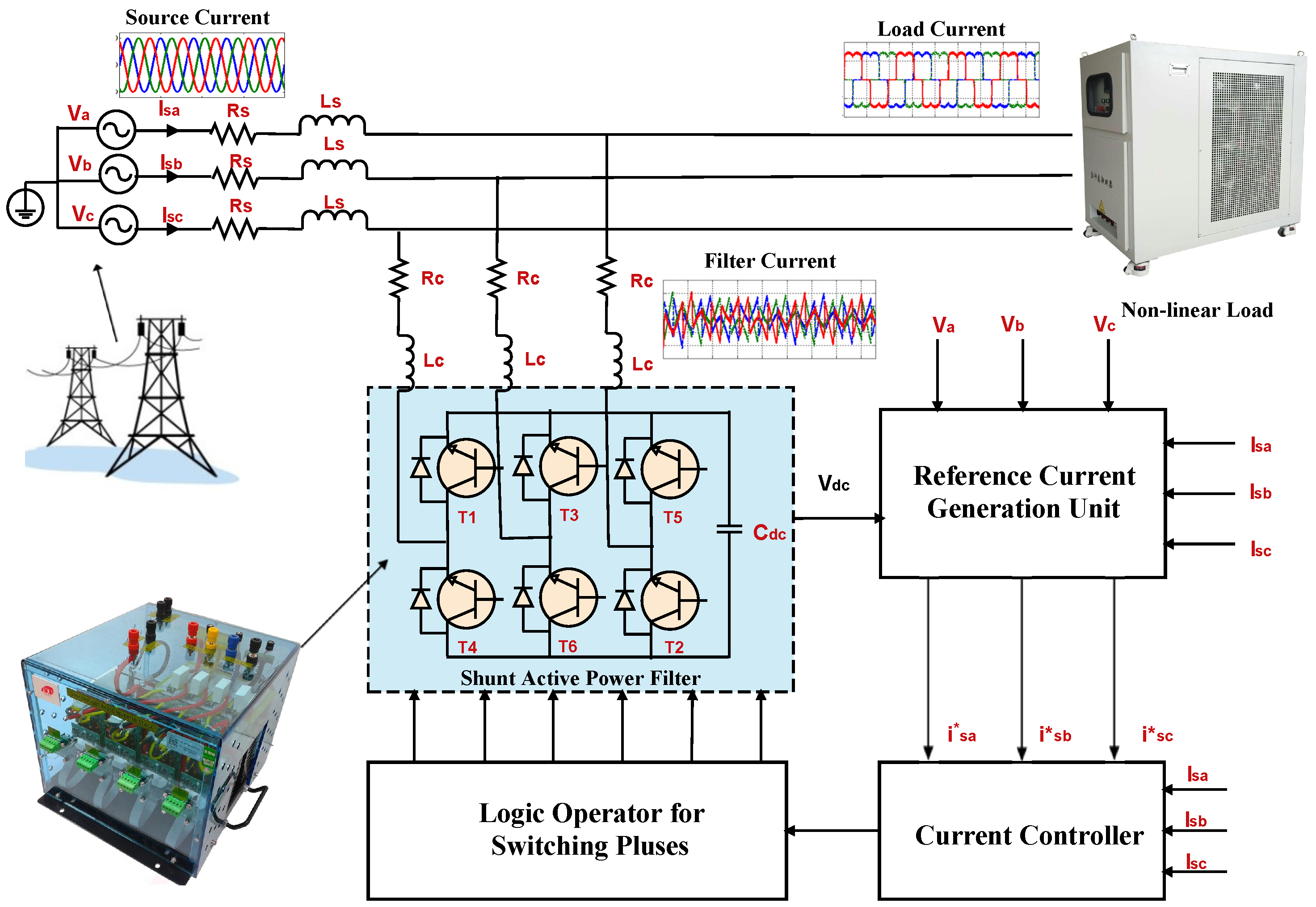
For current compensation, an active power filter (APF) should be connected in parallel with the source and load, so that the APF can inject filter current, which compensates the unwanted generated harmonics due to a non-linear load. The generated filter current should be just equal in magnitude and opposite in phase to the generated unwanted harmonic current for proper compensation. An active power filter is a power conditioning device which provides reactive power compensation and a load balancing solution in conjunction with harmonic compensation. A detailed review of active power filters with different configurations, control strategies, component selection and their selection criteria for specific applications is presented by Bhim Singh et al. [
3]. There are mainly four kinds of controlling evolved in the design of SAPFs, i.e., (1) controlling of current reference generation or harmonic extraction; (2) controlling of DC-link capacitor voltage (
); (3) controlling of switching pluses; (4) controlling of synchronization [
4]. The performance of SAPFs depends on the effectiveness of these controlling algorithms as well as proper selection of parameters.
There are many design parameters that affect the performance of SAPFs, such as gain of PI controller gains (
and
), DC-link capacitor (
) and interfacing impedance (
and
) of SAPFs. To extract the maximum performance for SAPFs, these parameters must be optimized. Some of these parameters have been optimized in earlier literature studies, such as Bruno A. Angelico’s use of a bode diagram for proportional-integral tuning for single-phase active power filter [
5]. The artificial bee colony optimization method has been implemented for optimal load compensation by SAPFs [
6]. Soft computing techniques, such as artificial neural network (ANN) and fuzzy logic controllers, have been used for designing SAPFs [
7,
8]. Hany M. Hasanien used the Taguchi method for optimizing PI controllers in cascaded control systems [
9]. The genetic algorithm (GA) was used for the tuning of the controller by Pericle Zanchetta [
10]. The design parameters of SAPFs have also been optimized by using the genetic algorithm approach by Hien [
11]. In spite of optimizing the parameters, none of the above-mentioned optimization methods provides information about the sensitivity of the parameters on the performance of SAPF compensation. The Taguchi method not only optimizes the parameters but also gives information about the sensitivity of the parameters on the performance of SAPF compensation. In Taguchi methods based on the difference in SNRs, a rank is allotted to each parameter which signifies the sensitivity of the parameters. The parameter variation in a more sensitive parameter affects results the most in the performance of SAPFs. Parameter’s sensitivity prediction is not possible in the genetic algorithm.
This paper proposes a new Taguchi SNR-based optimization method for the optimum selection of SAPF parameters [
9]. This manuscript is organized as follows: The configuration and proposed control structure used for SAPF designing are described in
Section 2; the optimization of SAPF parameters using the Taguchi method is given in
Section 3.
Section 4 describes the optimization of SAPF parameters by using the existing genetic algorithm method and simulation results and their analysis for both the existing and proposed methods. In
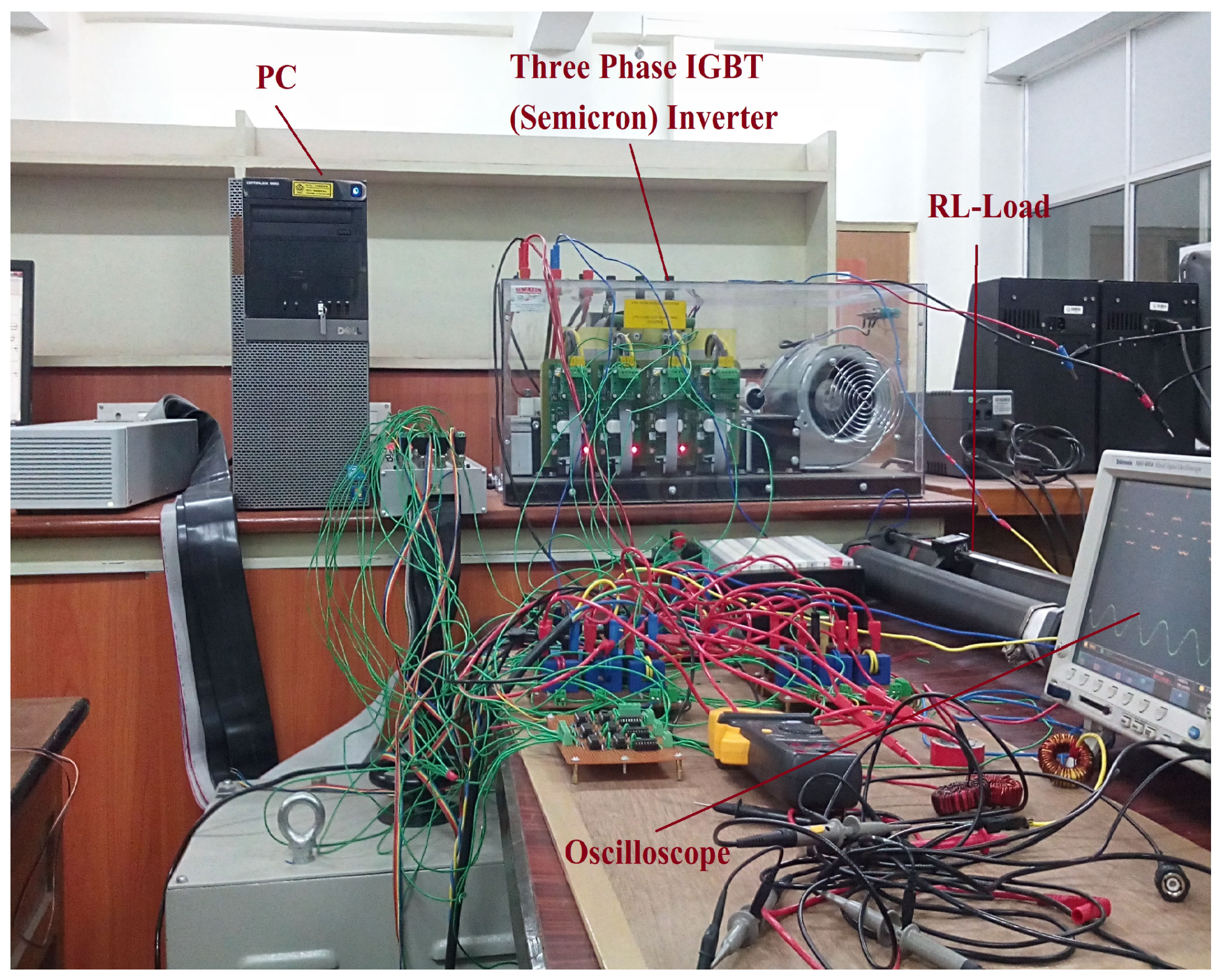
Section 5, the experimental results and their analysis for both the existing and proposed methods are given. Finally, some conclusions are discussed in
Section 6.
3. Taguchi Method for Optimization of SAPF Parameters
As other methods of optimization, such as genetic algorithm and particle swarm optimization, are not capable of describing the sensitivity of the parameters on the performance of an SAPF, the Taguchi method of optimization was used for this experimentation. The Taguchi Method is a statistical approach of parameter optimization introduced by Japanese engineer and statistician Genichi Taguchi in 1995 [
12]. The Taguchi method is not only capable of optimizing many parameters with lesser experimentation but also provides information about the effect of parameter variation on the performance of an SAPF based on the sensitivity of the parameters. Earlier, the Taguchi method has been mainly used to optimize the process parameters in manufacturing to improve the quality of the goods manufactured. Later, researchers have expanded its application in other fields of engineering. R.S. Rao et al. have discussed Taguchi method applications in biotechnology [
13]. R. Davis and P. John have presented Taguchi method applications in industrial chemical processes [
14]. A. Sorgdrager et al. have explained the use of the Taguchi method in electrical engineering [
15].
In the Taguchi method, the first parameters that need to be optimized are selected; then, a set of experiments is conducted as per orthogonal array (OA). After conducting the experimental run, the results are analyzed using the signal-to-noise ratio (SNR) to obtain the optimum values of the parameters and, finally, a verification run is conducted by taking the optimum values of the parameters obtained from the Taguchi method. Taguchi’s method for parameters requires the following steps [
16]:
Identify the function to be optimized.
Identify the controlling parameters and their levels.
Select a suitable orthogonal array (OA).
Perform a matrix experiment and obtain results.
Examine the results by SNR for optimization.
Perform a verification experiment.
3.1. Identifying the Function to Be Optimized
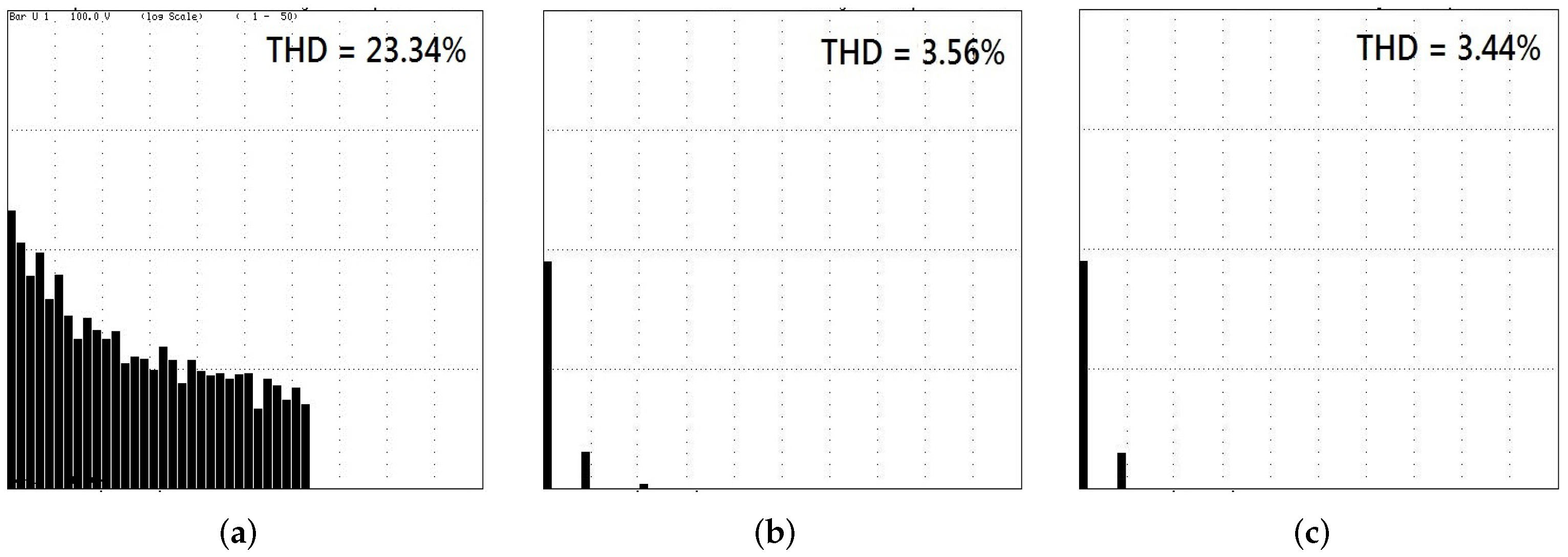
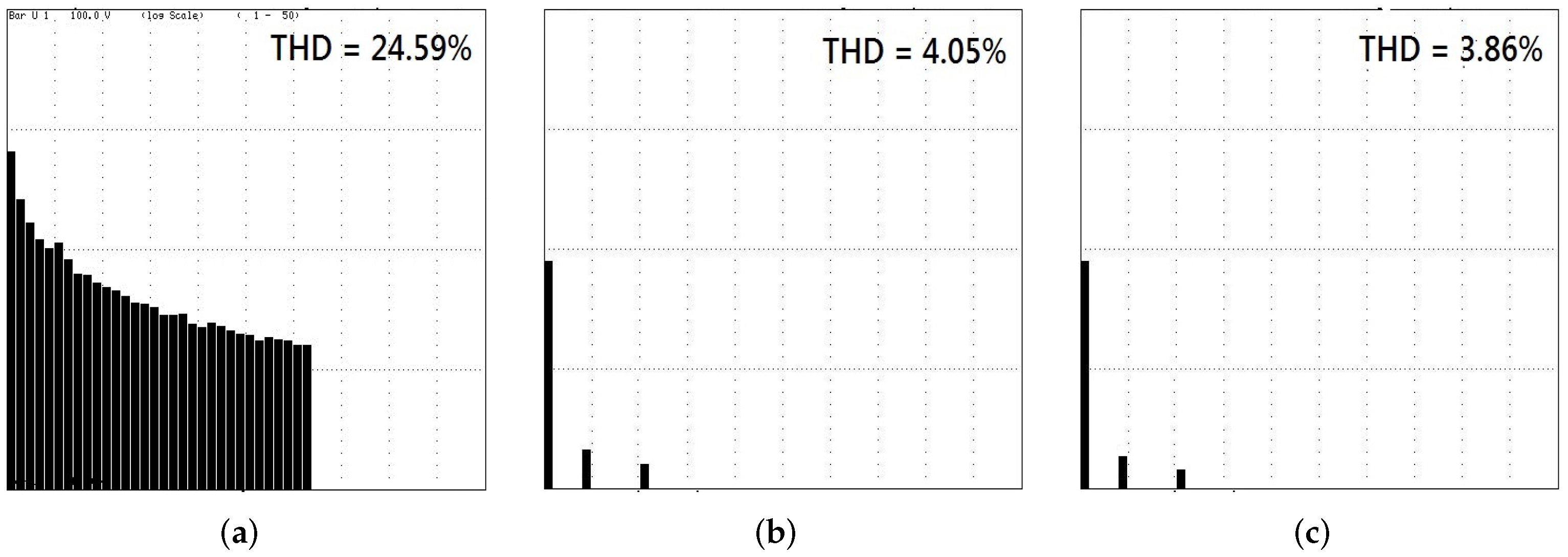
The main idea of designing a shunt active power filter is the mitigation of the harmonics generated by a non-linear load. Harmonics are measured by total harmonic distortion (THD). So, the main purpose of SAPF design is to minimize the THD. With the implementation of an SAPF, the THD should be less than 5%, as per IEEE Std.519. The smaller the THD, the better the SAPF; hence, we considered that a smaller SNR ratio was better for analyzing the results.
3.2. Identifying the Control Factors and Their Levels
The proper selection of the parameters is necessary for successful implementation of an SAPF. The selection of the parameters affects the performance of the SAPF. There are many parameters, such as the gain of the PI controller (
and
), coupling register (
) and inductor (
), and the DC-link capacitor (
) affects the performance of the parameters; hence, the proper selection of these parameters is necessary to obtain optimum performance of the SAPF. For our experimentation, we selected five parameters—coupling resistor (
), coupling inductor (
), PI controller gain parameters (
and
) and DC-link capacitor (
). Due to the lack of accuracy values of these parameters, we manually selected four different levels of these parameters. The Taguchi method reduces effort and time to find an optimum set of these levels. The purpose of implementing this method is to efficiently determine the optimum set of these parameters for achieving the least THD. The parameters and their level are shown in
Table 1.
3.3. Selecting a Suitable Orthogonal Array (OA)
The selection of an orthogonal array (OA) depends on number of factors and number of levels selected for experimentation. Taguchi uses the following convention for naming the orthogonal arrays : N = total number of trial during experimentation, S = number of levels for each factor and K = number of parameters or factors. Taguchi’s design can have many factors with several levels. This method requires a lower number of experiments than traditional full factorial designs. For our experimentation, we considered five factors with four levels. The full factorial design method would have required 4 = 1024 experiments, while the Taguchi method required only 16 experiments to obtain the optimum set of parameters. An orthogonal array (OA) should be selected so as to obtain proper optimum results with as few runs as possible. For our experimentation with five factors with four levels, a standard L16 orthogonal array meets the above criteria. The L16 orthogonal array was selected for the experimental matrix.
3.4. Performing Matrix Experiments and Obtaining Results
After selecting a suitable orthogonal array (OA), the experimental matrix was constructed according to the selected orthogonal array (OA). As per the experimental matrix, the experiments were performed and the results were collected. These results were used for calculating the signal-to-noise ratio. For our experimentation, we selected an L16 orthogonal array; hence, we had to perform a total of 16 experiments using this method, instead of 1024 experiment using a full factorial design method. The experimental matrix and results (THD) are noted in
Table 2.
Our objective function THD was used for calculating the SNR. The objective function (THD) is a “smaller-the-better”-type of control function i.e., the smaller the THD, the better the performance of the SAPF. The signal-to-noise ratio for the “smaller-the-better”-type objective function could be calculated from Equation (
4).
where
is the signal-to-noise ratio in dB and
is the output which is needed to be optimized; in this case,
is the THD.
The SNRs for all 16 experiments were calculated and tabulated in
Table 3.
The average SNR for the individual control factors and for each level is tabulated in
Table 4.
Table 4 also contains the sum of the differences in SNRs for each level of individual control factors. Based on the sum of the difference, the control factors were ranked. The larger the sum of the difference, the more sensitive the parameter. As we can see,
had a grater sum of difference; hence, it ranked first, i.e.,
was the most sensitive parameter and any variation in the
level affected the most the SAPF’s performance; hence, the THD changed the most with any variation in
. Similarly,
had the least sum of difference; hence, it ranked fifth, showing that the variation in the
level affected the least the SAPF’s performance and THD. The rank identification of parameters is not possible in soft computing techniques such as the genetic algorithm.
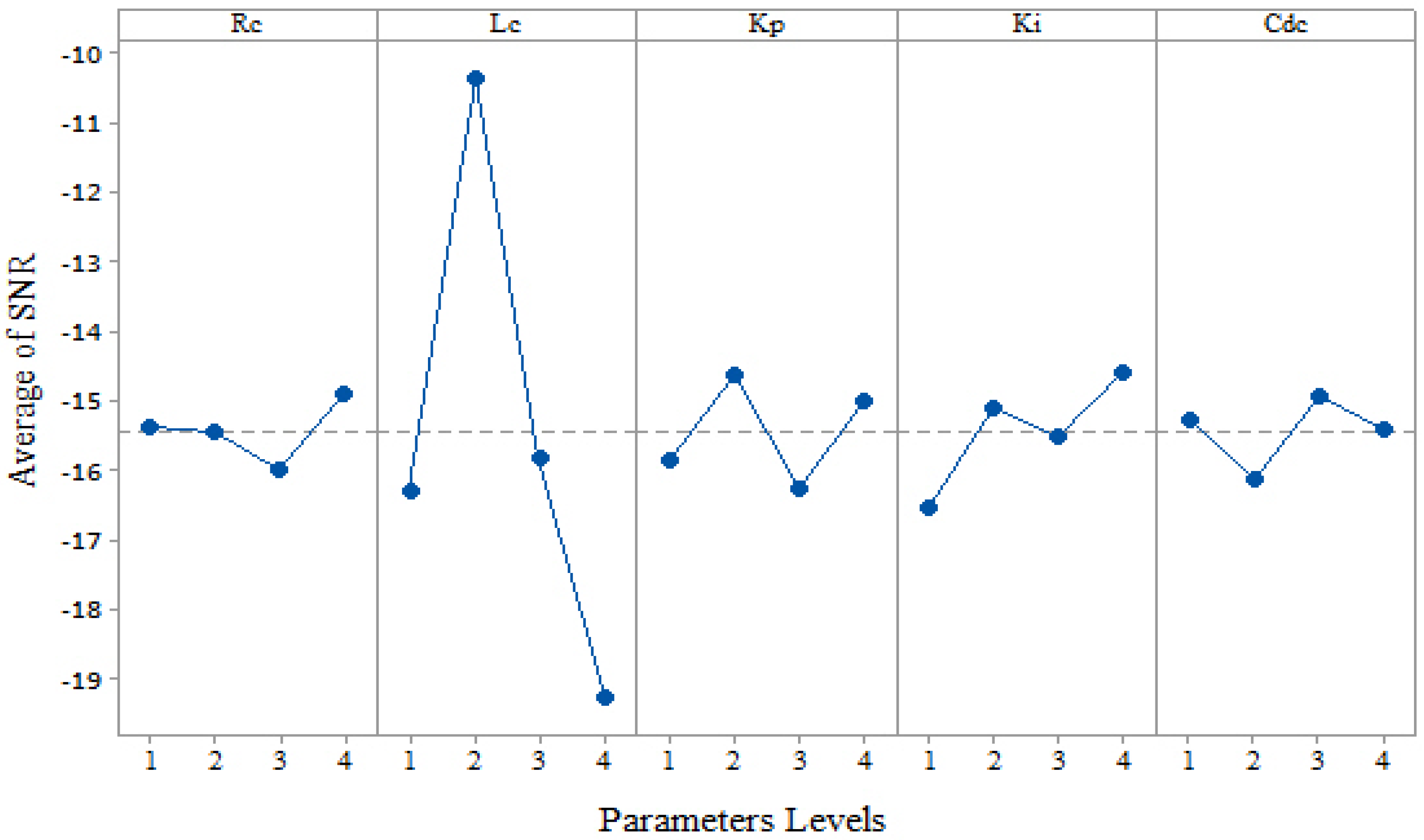
The factor level having the highest SNR is the most optimized level of that factor. From
Table 4, a linear graph was drawn, shown in
Figure 4. In
Figure 4, it is clear that the optimum levels of the parameters
,
,
,
and
were level 4, 2, 2, 4 and 3, respectively.
Table 5 contains the optimum level of the parameters with their optimum values for obtaining the least THD. Using this Taguchi method, we obtained the optimum levels by only conducting 16 experiments instead of conducting 1024 experiments, as we would have had to do adopting a full factorial design.
3.5. Performing A Verification Experiment
After obtaining the optimum levels of the parameters, a verification experiment was performed by taking the optimum values of these parameters (i.e., = 100 m, = 1 mH, = 0.05, = 10 and = 30 F) with a three-phase bridge rectifier, with R-L taken as the load. After performing the experiment, the THD was reduced to 2.88%, which is the lowest among all the possible combinations of the above parameters’ values.
4. SAPF Parameter Optimization by Genetic Algorithm
The genetic algorithm (GA) is an intelligent searching method inspired by the genetic laws of reproduction and natural evolution. The GA was proposed by J.H. Holland in 1992. The GA includes initialization of population, defining fitness function, selection, crossover, mutation and checking termination condition. The set of individual parameters which is a solution of a problem is called population. Initially, a population is randomly initialized, but basic parameters of the GA, such as chromosome length and population size, must be specified. A fitness function is used to determine the fitness of an individual population. Better fitness means a better individual, with better chances of survival. The selection process is used to select the fittest individuals for reproduction and for passing their genes to the next generation. Crossover is the process of interchanging genetic properties between two chromosomes to obtain the next generation. Mutation is the process of changing the values of genes of chromosomes after the crossover process. After the selection, crossover and mutation operations, a new population is generated that is better adapted than the previous generation. This algorithm is completed when the fitness function achieves maximum value or the stopping criteria are reached.
For comparing the optimization result with the Taguchi method, we took the same initial condition used in the Taguchi method. The fitness function was the THD as given in Equation (
5) and the same range of parameters was considered. The lower and upper boundaries of
,
,
,
and
were considered as [0.1–100] m
, [0.5–2] mH, [0.01–0.5], [0.01–10] and [10–40]
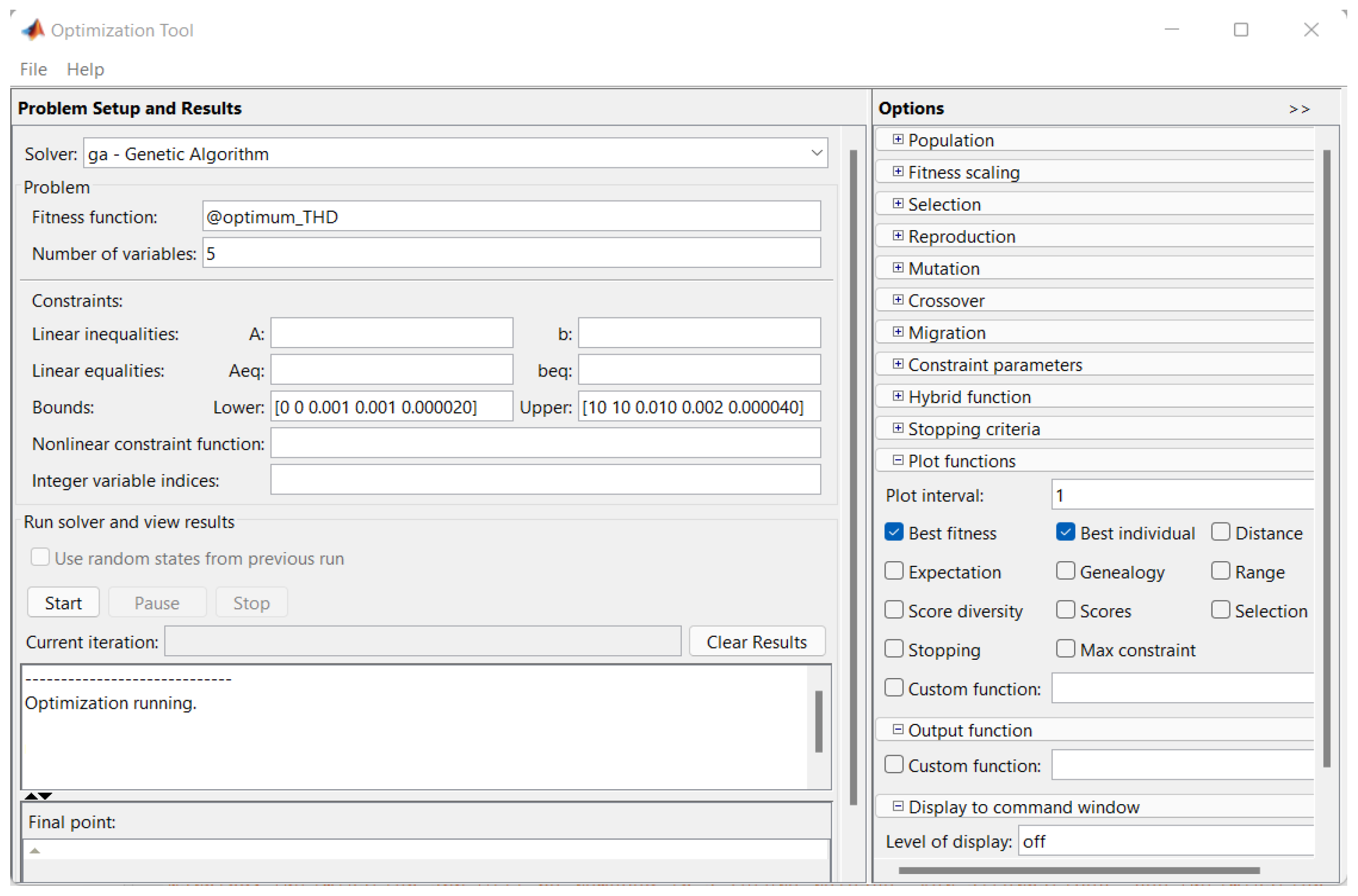
F, respectively. The MATLAB optimization toolbox was used for optimizing the parameters using the GA as shown in
Figure 5. The initial population was set to 4 and the maximum number of generations was set to 16 for the experimentation. The stochastic uniform selection criterion was chosen. Scatter crossover and uniform mutation were used for optimization.
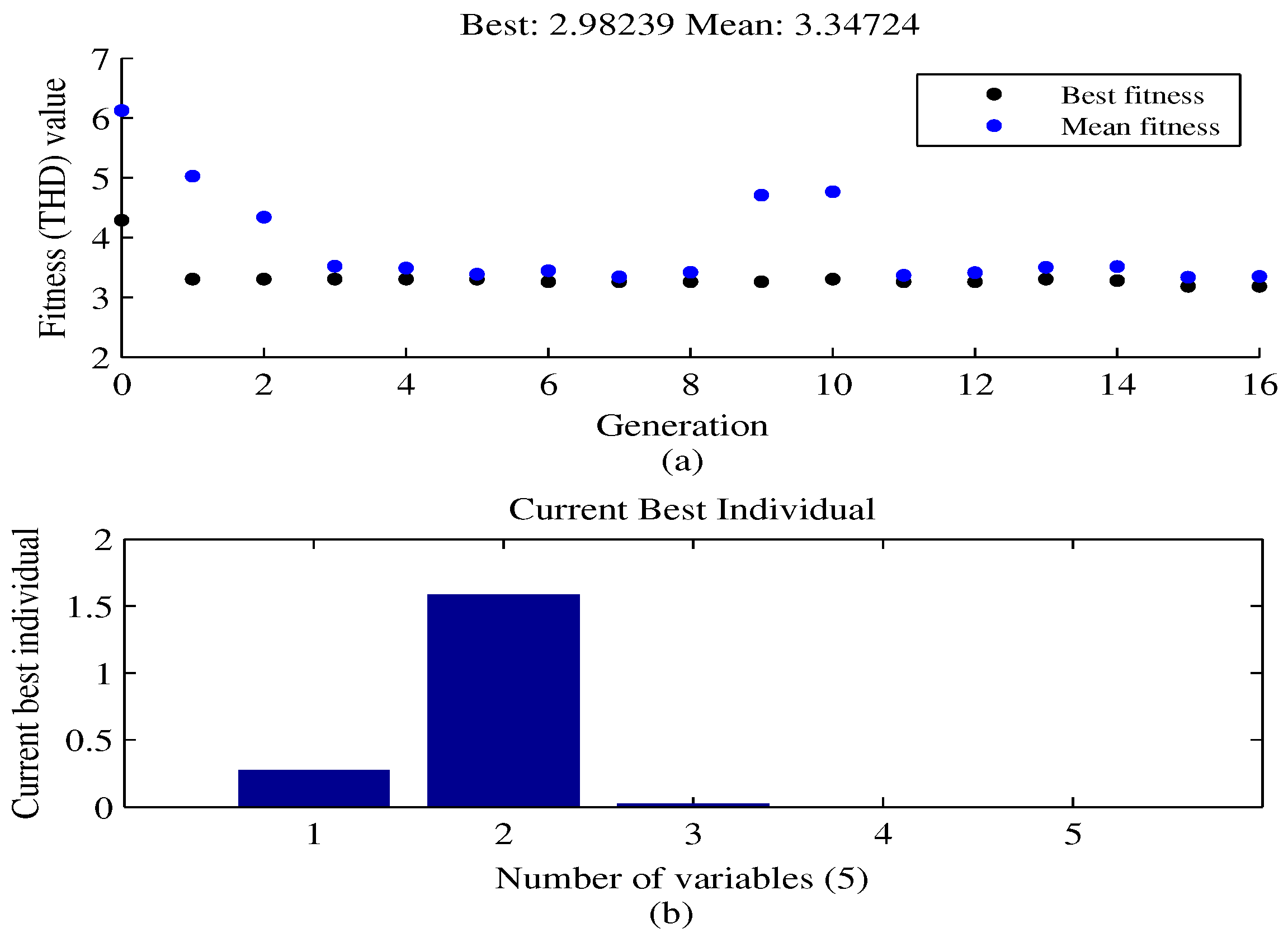
Figure 6 shows the optimization results obtained by the GA.
Figure 6a represents the best and mean values of the filthiness function, i.e., the THD after each generation. In
Figure 6a, we can observe the convergence of the THD with each generation.
Figure 6b represents the optimum values of the individual parameters. As observed from GA optimization, we obtained optimum values of the parameters as
= 25.4084 m
= 0.7738 mH,
= 0.2623
= 1.5846 and
= 38.7848
F), as well as the lowest THD value of 2.98%.
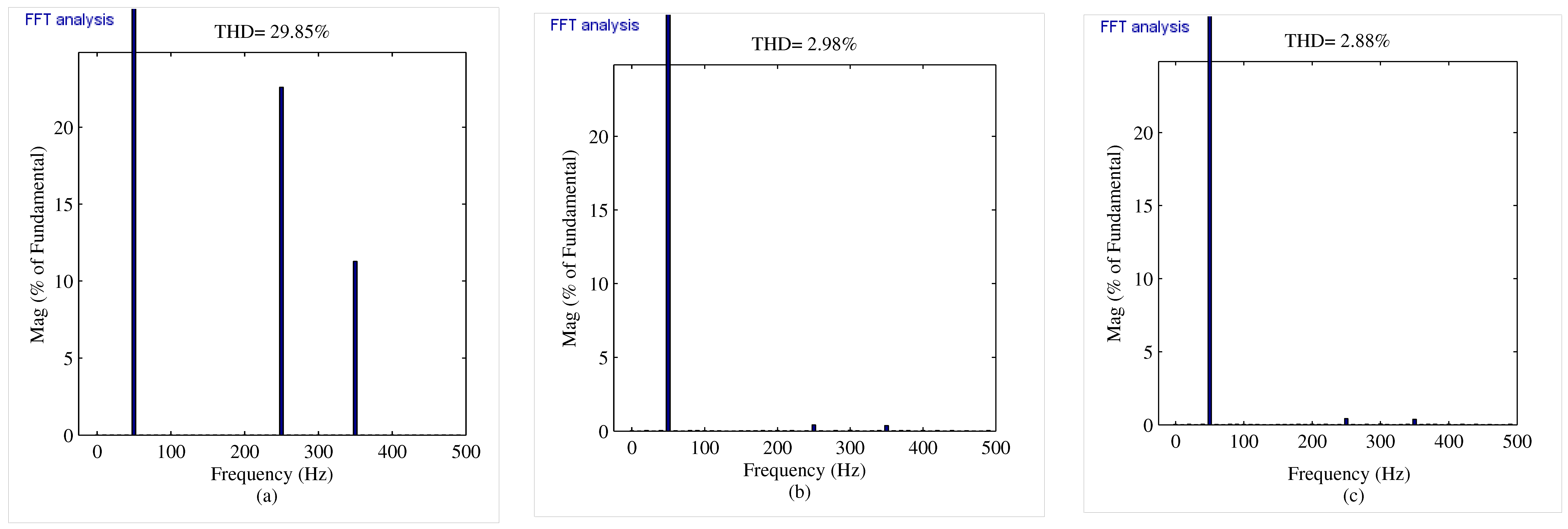
The simulation results for both the existing genetic algorithm method and the proposed Taguchi algorithm method are shown in
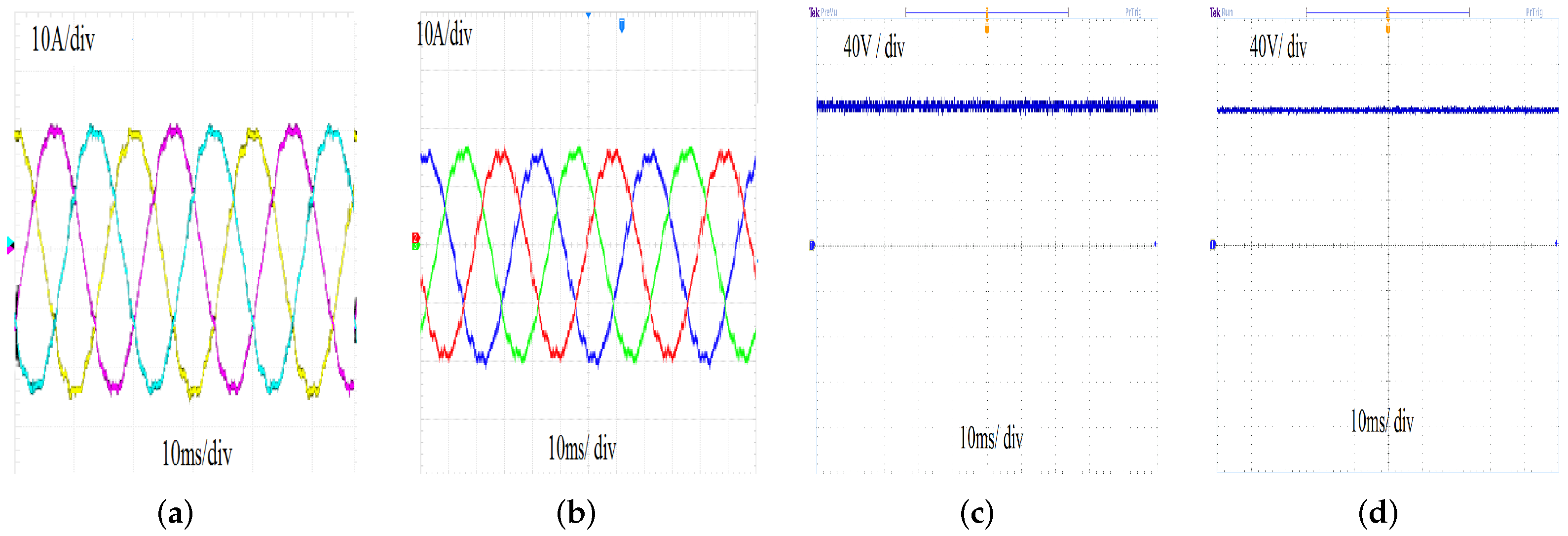
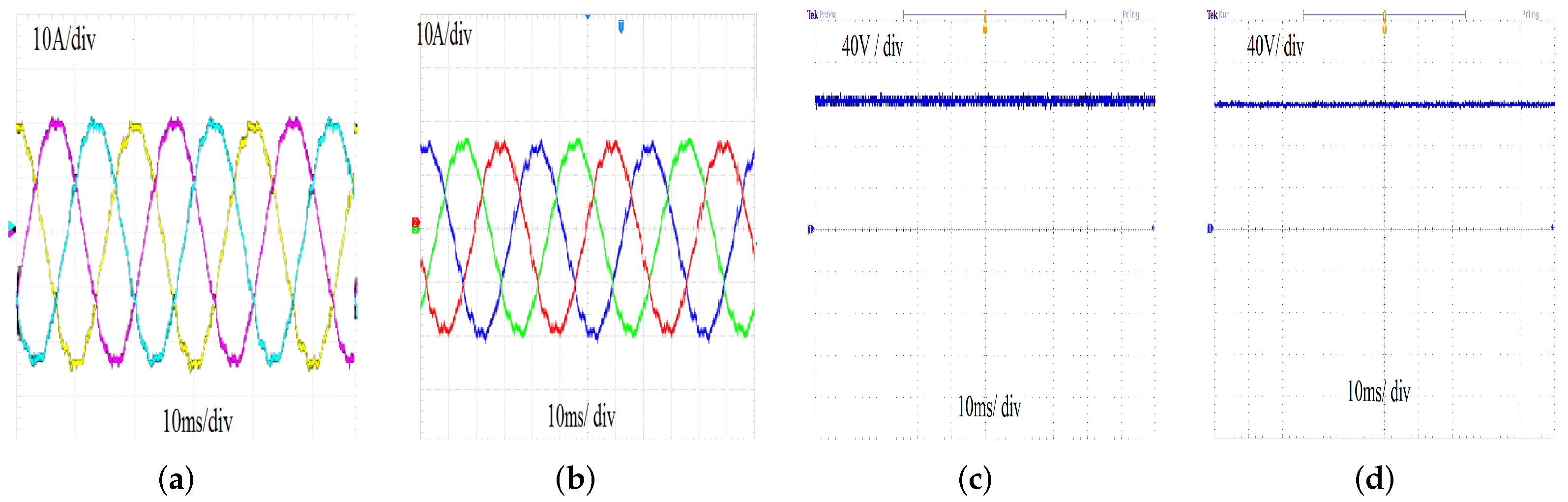
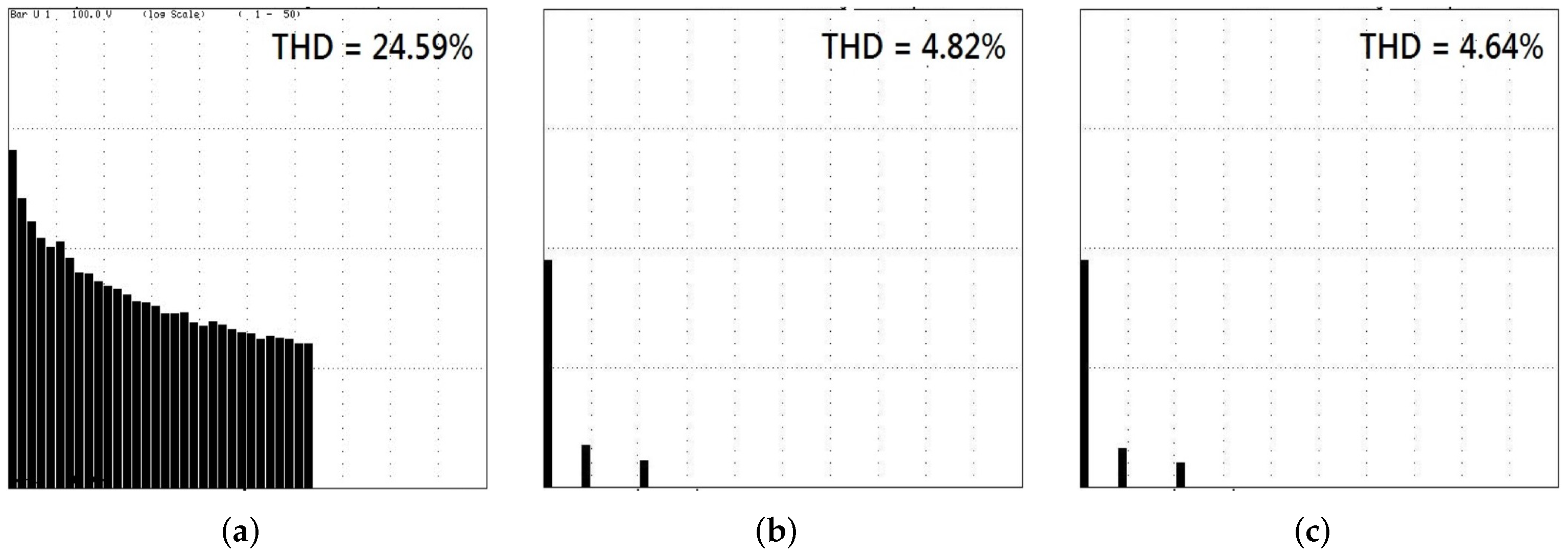
Figure 7. From the simulation results of the FFT analysis of the source current without compensation, the THD was 29.85%; with the proposed method’s compensation, the THD was reduced to 2.88%, which is lower than the existing genetic algorithm (THD = 2.98%). The superiority of the proposed method over the existing method was also verified by experimental validation with three different cases, mentioned below.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}