



Space Discretization-Based Optimal Trajectory Planning for Automated Vehicles in Narrow Corridor Scenes
 , and
, and
Abstract
1. Introduction
1.1. Related Work
1.2. Contributions
1.3. Organization
2. Problem Statement
3. Methodology
3.1. Vehicle Kinematics Modeling
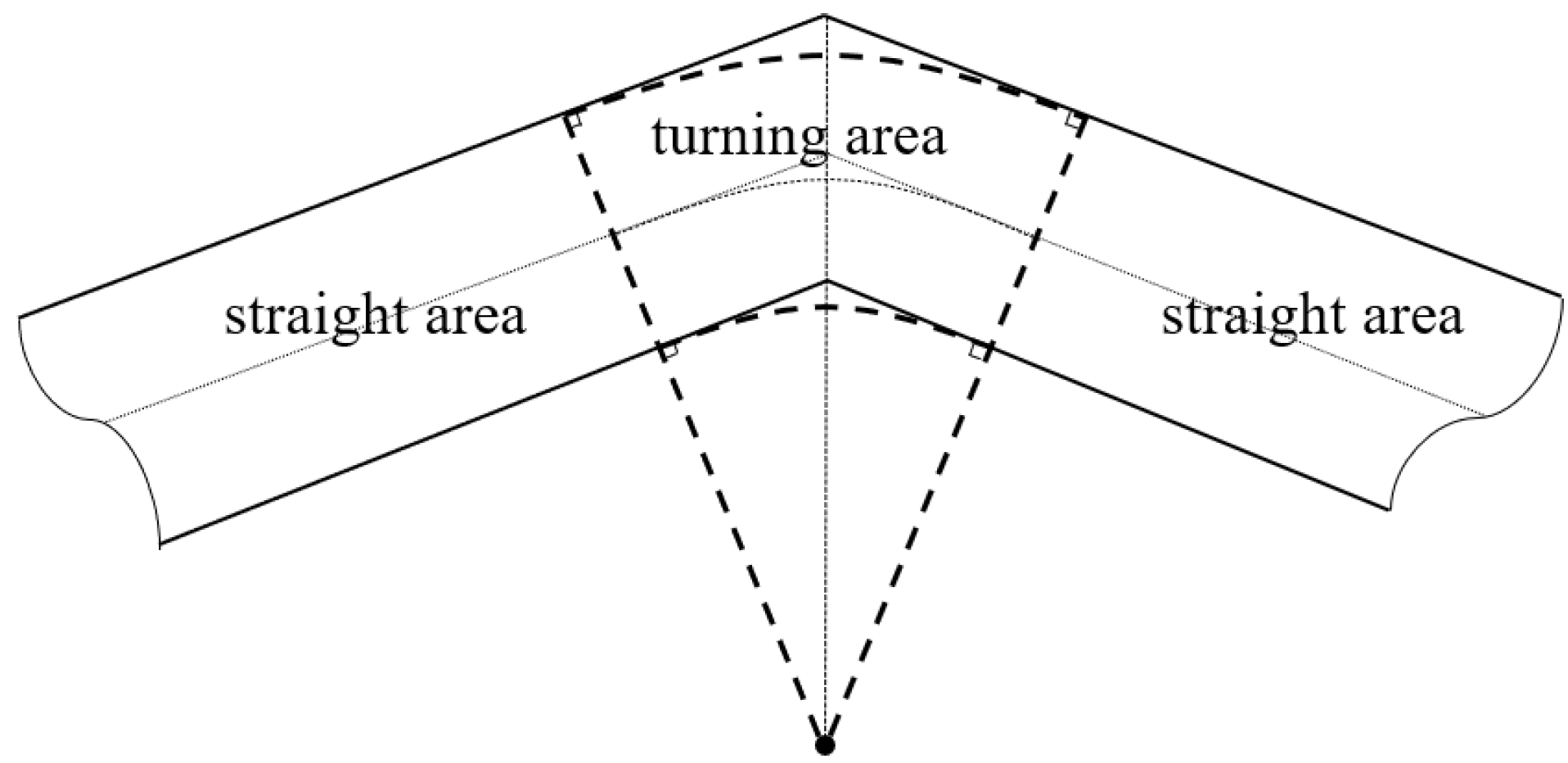
3.2. Space Discretization Strategy
3.3. Vehicle Trajectory Optimization
3.3.1. Objective Function
3.3.2. Terminal Posture Constraints
3.3.3. Vehicle Kinematics Constraints
3.3.4. Vehicle Speed Constraints
3.3.5. Actuator Range Constraints
3.3.6. Tire Side-Force Constraints
3.3.7. Acceleration and Angular Velocity Constraints
3.3.8. Collision Avoidance Constraints
3.4. SOTP Method Design
4. Numerical Simulation
4.1. Single Corner Scenario
4.1.1. Simulation Setup
4.1.2. Simulation Result
4.2. Multi Corners Scenario
4.2.1. Baseline Methods
4.2.2. Simulation Setup
4.2.3. Evaluation Metrics
4.2.4. Trajectory Generation Result
4.3. Sensitivity Analysis
5. Field Experiment
5.1. Experiment Setup
5.2. Experiment Result
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning | Value |
|---|---|---|
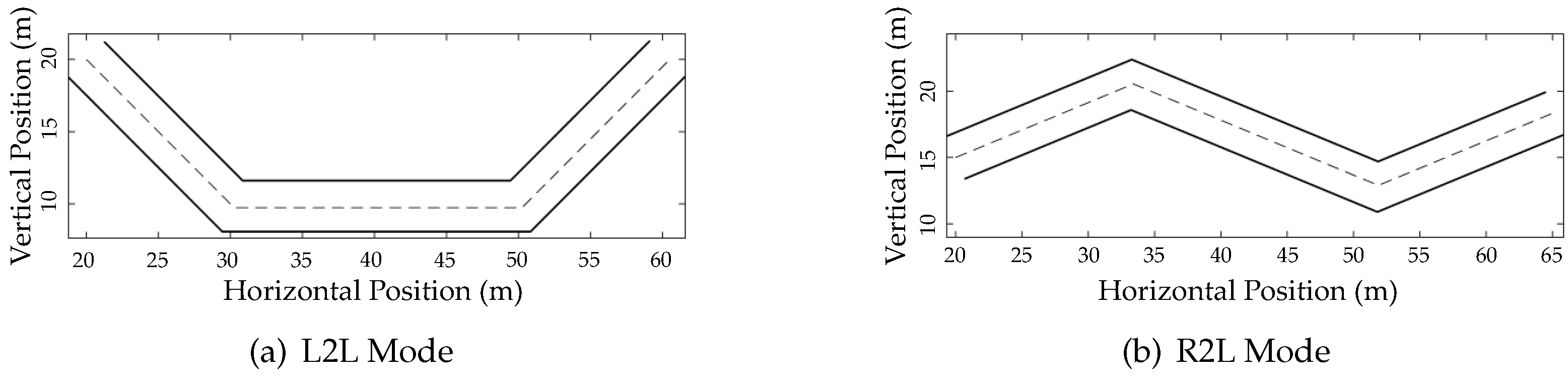
| W | Corridor width (L2L) | 3.5 m |
| T1 | The first corridor turning angle (L2L) | |
| T2 | The second corridor turning angle (L2L) | |
| W | Corridor width (R2L) | 3.5 m |
| T1 | The first corridor turning angle (R2L) | |
| T2 | The second corridor turning angle (R2L) |
| Symbol | Meaning | Value |
|---|---|---|
| l | Vehicle length | 4.925 m |
| L | Vehicle wheelbase | 2.850 m |
| Vehicle front overhang | 1.076 m | |
| w | Vehicle width | 1.864 m |
| Symbol | Meaning | Value |
|---|---|---|
| The maximum steering angle | ||
| The limitation of wheel steering angular velocity | s | |
| The maximum allowable vehicle speed | 10 m · s | |
| The minimum allowable vehicle speed | 1 m · s | |
| The maximum limitation of vehicle acceleration | 2 m · s | |
| The maximum limitation of vehicle deceleration | −2 m · s | |
| The adhesive coefficient | 0.3 | |
| g | The gravity coefficient | 9.8 m · s |
References
- Milakis, D.; Arem, B.V.; Wee, B.V. Policy and society related implications of automated driving: A review of literature and directions for future research. J. Intell. Transp. Syst. 2017, 21, 324–348. [Google Scholar] [CrossRef]
- Chan, T.K.; Chin, C.S. Review of Autonomous Intelligent Vehicles for Urban Driving and Parking. Electronics 2021, 10, 1021. [Google Scholar] [CrossRef]
- Guo, Z.; Huang, Y.; Hu, X.; Wei, H.; Zhao, B. A Survey on Deep Learning Based Approaches for Scene Understanding in Autonomous Driving. Electronics 2021, 10, 471. [Google Scholar] [CrossRef]
- Li, B.; Tang, S.; Zhang, Y.; Zhong, X. Occlusion-Aware Path Planning to Promote Infrared Positioning Accuracy for Autonomous Driving in a Warehouse. Electronics 2021, 10, 3093. [Google Scholar] [CrossRef]
- Ziegler, J.; Bender, P.; Schreiber, M.; Lategahn, H.; Strauss, T.; Stiller, C.; Dang, T.; Franke, U.; Appenrodt, N.; Keller, C.G.; et al. Making bertha drive—an autonomous journey on a historic route. IEEE Intell. Transp. Syst. Mag. 2014, 6, 8–20. Available online: https://ieeexplore.ieee.org/document/6803933 (accessed on 15 November 2022). [CrossRef]
- Vu, T.M.; Moezzi, R.; Cyrus, J.; Hlava, J. Model Predictive Control for Autonomous Driving Vehicles. Electronics 2021, 10, 2593. [Google Scholar] [CrossRef]
- Sharma, O.; Sahoo, N.C.; Puhan, N.B. Recent advances in motion and behavior planning techniques for software architecture of autonomous vehicles: A state-of-the-art survey. Eng. Appl. Artif. Intell. 2021, 101, 104211. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. Available online: https://ieeexplore.ieee.org/document/7490340 (accessed on 15 November 2022). [CrossRef]
- Zhang, C.; Chu, D.; Liu, S.; Deng, Z.; Wu, C.; Su, X. Trajectory planning and tracking for autonomous vehicle based on state lattice and model predictive control. IEEE Intell. Transp. Syst. Mag. 2019, 11, 29–40. Available online: https://ieeexplore.ieee.org/abstract/document/8668708 (accessed on 15 November 2022). [CrossRef]
- Jiang, B.; Li, X.; Zeng, Y.; Liu, D. Human-Machine Cooperative Trajectory Planning for Semi-Autonomous Driving Based on the Understanding of Behavioral Semantics. Electronics 2021, 10, 946. [Google Scholar] [CrossRef]
- Li, B.; Ouyang, Y.; Li, L.; Zhang, Y. Autonomous Driving on Curvy Roads Without Reliance on Frenet Frame: A Cartesian-Based Trajectory Planning Method. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15729–15741. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A review of motion planning techniques for automated vehicles. IEEE Intell. Trans. Intell. Transp. Syst. 2015, 17, 1135–1145. Available online: https://ieeexplore.ieee.org/document/7339478 (accessed on 15 November 2022). [CrossRef]
- Fraichard, T.; Scheuer, A. From Reeds and Shepp’s to continuous-curvature paths. IEEE Trans. Robot. 2004, 20, 1025–1035. Available online: https://ieeexplore.ieee.org/document/1362698 (accessed on 15 November 2022). [CrossRef]
- Bae, I.; Kim, J.H.; Moon, J.; Kim, S. Lane Change Maneuver based on Bezier Curve providing Comfort Experience for Autonomous Vehicle Users. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 2272–2277. [Google Scholar]
- Elbanhawi, M.; Simic, M. Sampling-based robot motion planning: A review. IEEE Access 2014, 2, 56–77. Available online: https://ieeexplore.ieee.org/abstract/document/6722915/ (accessed on 15 November 2022). [CrossRef]
- Zheng, K.; Liu, S. RRT based path planning for autonomous parking of vehicle. In Proceedings of the 2018 IEEE 7th Data Driven Control and Learning Systems Conference (DDCLS), Enshi, China, 25–27 May 2018; pp. 627–632. [Google Scholar]
- Stentz, A. Optimal and efficient path planning for partially known environments. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation (ICRA), San Diego, CA, USA, 8–13 May 1994; pp. 3310–3317. [Google Scholar]
- Min, H.; Xiong, X.; Wang, P.; Yu, Y. Autonomous driving path planning algorithm based on improved A* algorithm in unstructured environment. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 513–526. [Google Scholar] [CrossRef]
- Li, C.; Du, J.; Liu, B.; Li, J. A Path Planning Method Based on Hybrid A-Star and RS Algorithm. In Proceedings of the 3rd International Forum on Connected Automated Vehicle Highway System, Jinan, China, 23–25 October 2020. [Google Scholar]
- Dirik, M.; Kocamaz, F. RRT-Dijkstra: An Improved Path Planning Algorithm for Mobile Robots. J. Soft Comput. Artif. Intell. 2020, 1, 69–77. Available online: https://dergipark.org.tr/en/pub/jscai/issue/56697/784679 (accessed on 15 November 2022).
- Kogan, D.; Murray, R. Optimization-based navigation for the DARPA Grand Challenge. In Proceedings of the 45th IEEE Conference on Decision and Control (CDC), San Diego, CA, USA, 13–15 December 2006. [Google Scholar]
- Li, S.; Li, Z.; Yu, Z.; Zhang, B.; Zhang, N. Dynamic trajectory planning and tracking for autonomous vehicle with obstacle avoidance based on model predictive control. IEEE Access 2019, 7, 132074–132086. Available online: https://ieeexplore.ieee.org/document/8835033/ (accessed on 15 November 2022). [CrossRef]
- Dixit, S.; Montanaro, U.; Dianati, M.; Oxtoby, D.; Mizutani, T.; Mouzakitis, A.; Fallah, S. Trajectory planning for autonomous high-speed overtaking in structured environments using robust MPC. IEEE Intell. Trans. Intell. Transp. Syst. 2019, 21, 2310–2323. Available online: https://ieeexplore.ieee.org/document/8734145 (accessed on 15 November 2022). [CrossRef]
- Zhu, S.; Aksun-Guvenc, B. Trajectory Planning of Autonomous Vehicles Based on Parameterized Control Optimization in Dynamic on-Road Environments. J. Intell. Robot. Syst. 2020, 100, 1055–1067. Available online: https://link.springer.com/article/10.1007/s10846-020-01215-y (accessed on 15 November 2022). [CrossRef]
- Szkandera, J.; Kolingerová, I.; Maňák, M. Narrow passage problem solution for motion planning. In Proceedings of the International Conference on Computational Science (ICCS), Amsterdam, The Netherlands, 3–5 June 2020; pp. 459–470. [Google Scholar]
- Kim, D.; Chung, W.; Park, S. Practical motion planning for car-parking control in narrow environment. IET Control. Theory Appl. 2010, 4, 129–139. [Google Scholar] [CrossRef]
- Li, B.; Yin, Z.; Ouyang, Y.; Zhang, Y.; Zhong, X.; Tang, S. Online Trajectory Replanning for Sudden Environmental Changes During Automated Parking: A Parallel Stitching Method. IEEE Trans. Intell. Veh. 2022, 7, 748–757. [Google Scholar] [CrossRef]
- Do, Q.H.; Mita, S.; Yoneda, K. Narrow passage path planning using fast marching method and support vector machine. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings (IV), Ypsilanti, CA, USA, 8–11 June 2014; pp. 630–635. [Google Scholar]
- Tian, X.; Fu, M.; Yang, Y.; Wang, M.; Liu, D. Local Smooth Path Planning for Turning Around in Narrow Environment. In Proceedings of the 28th IEEE International Symposium on Industrial Electronics (ISIE), Vancouver, BC, Canada, 12–14 June 2019; pp. 1924–1929. [Google Scholar]
- Li, B.; Acarman, T.; Zhang, Y.; Zhang, L.; Yaman, C.; Kong, Q. Tractor-trailer vehicle trajectory planning in narrow environments with a progressively constrained optimal control approach. IEEE Trans. Intell. Veh. 2020, 5, 414–425. [Google Scholar] [CrossRef]
- Li, B.; Acarman, T.; Zhang, Y.; Ouyang, Y.; Yaman, C.; Kong, Q.; Zhong, X.; Peng, X. Optimization-Based Trajectory Planning for Autonomous Parking With Irregularly Placed Obstacles: A Lightweight Iterative Framework. IEEE Trans. Intell. Transp. Syst. 2022, 23, 11970–11981. [Google Scholar] [CrossRef]
- Lin, X.; Xie, H.; Xu, B.; Yuan, S.; Bian, Y.; Hu, M.; Qin, Z.; Hu, J. A Vehicle Trajectory Planning Method for Narrow Corridor in Mines Based on Optimal Control. Control Inf. Technol. 2022, 05, 23–29. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?filename=BLJS202205004&dbname=cjfdtotal&dbcode=CJFD&v=MTE0NzhSNkRnOC96aFlVN3pzT1QzaVFyUmN6RnJDVVI3aWVaZWRyRmkza1Y3N0JKeUhCZmJHNEhOUE1xbzlGWUk= (accessed on 15 November 2022).
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Springer: New York, NY, USA, 2012; pp. 24–25. [Google Scholar]
- Ziegler, J.; Bender, P.; Dang, T.; Stiller, C. Trajectory planning for Bertha—A local, continuous method. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings (IV), Ypsilanti, CA, USA, 8–11 June 2014; pp. 450–457. [Google Scholar]
- Biegler, L.T.; Zavala, V.M. Large-scale nonlinear programming using IPOPT: An integrating framework for enterprise-wide dynamic optimization. Comput. Chem. Eng. 2009, 33, 575–582. [Google Scholar] [CrossRef]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Mahoney, P. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Practical search techniques in path planning for autonomous driving. In Proceedings of the First International Symposium on Search Techniques in Artificial Intelligence and Robotics (STAIR-08), Chicago, IL, USA, 13–14 July 2008. [Google Scholar]
- Yin, C.; Xu, B.; Chen, X.; Qin, Z.; Bian, Y.; Sun, N. Nonlinear Model Predictive Control for Path Tracking Using Discrete Previewed Points. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar]













| Symbol | Meaning | Value |
|---|---|---|
| NC1 | Corner angle of the first narrow corridor | 180 |
| NC2 | Corner angle of the second narrow corridor | 175 |
| ⋯ | ⋯ | ⋯ |
| NCz | Corner angle of the z narrow corridor | (185-5z) |
| Corridor width of the narrow corridors | 3.5 m |
| Symbol | Meaning | Value |
|---|---|---|
| The allowable error in the x-axis | 0.0625 m | |
| The allowable error in the y-axis | 0.0625 m | |
| The allowable heading error | 0.0685 rad | |
| The number of fitted circles | 3 | |
| N | The number of discrete waypoints | 60 |
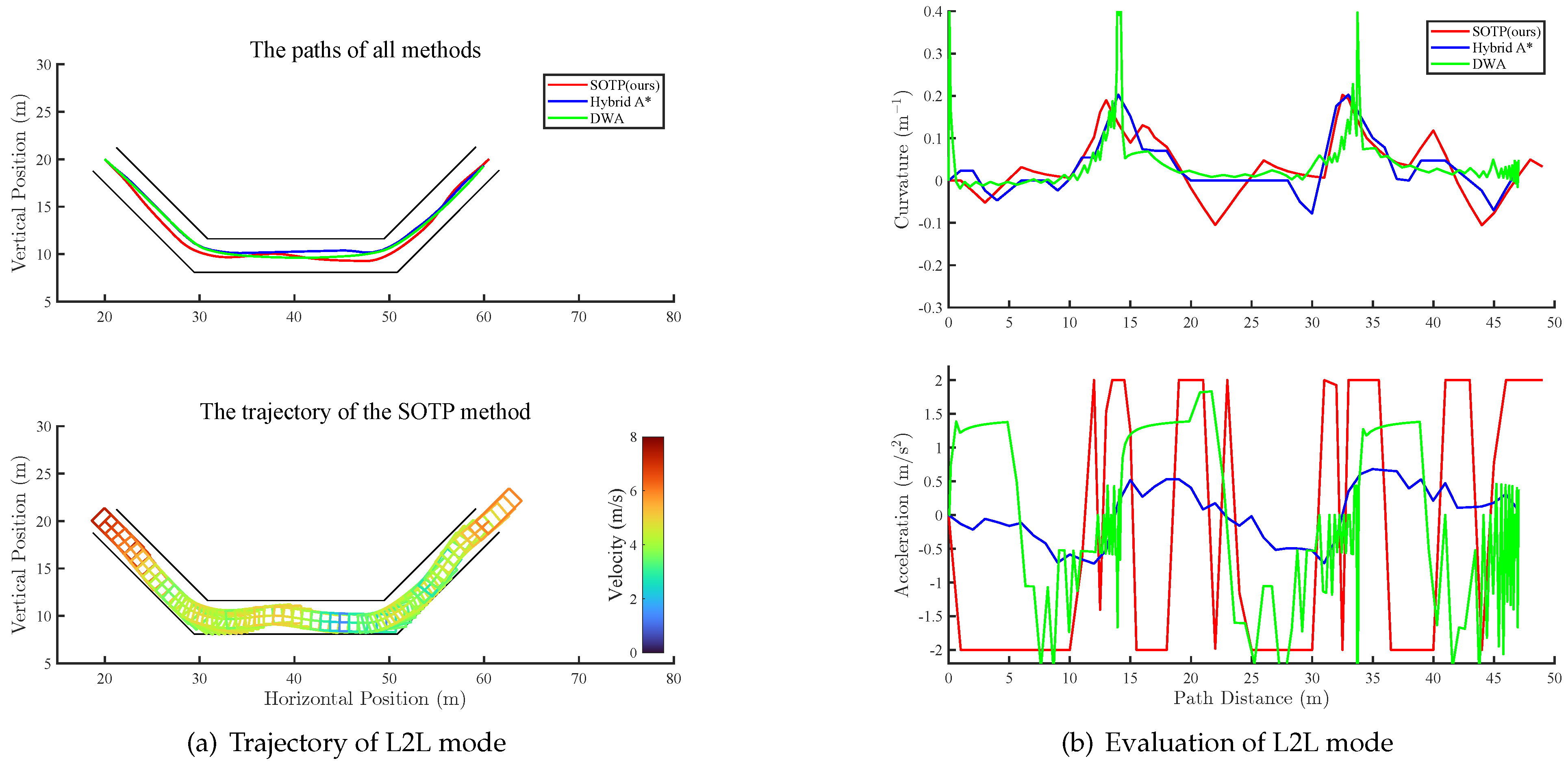
| Method | Mode | Max. Curvature (m) | Max. Acceleration (m/s) | Avg. Velocity (m/s) | Travel Time (s) | Computational Time (s) |
|---|---|---|---|---|---|---|
| Hybrid A star | L2L | 0.20 | 0.70 | 3.96 | 12.21 | 83.83 |
| R2L | 0.18 | 0.83 | 4.33 | 10.91 | 77.35 | |
| DWA | L2L | 0.69 | 2.33 | 1.77 | 27.68 | 48.65 |
| R2L | 0.62 | 2.42 | 1.47 | 33.33 | 82.62 | |
| SOTP(ours) | L2L | 0.20 | 2.00 | 4.39 | 11.16 | 30.91 |
| R2L | 0.20 | 2.00 | 4.84 | 10.11 | 9.37 |
| Fitted Circle Number | Mode | Max. Curvature (m) | Max. Acceleration (m/s) | Avg. Velocity (m/s) | Travel Time (s) | Computational Time (s) |
|---|---|---|---|---|---|---|
| L2L | 0.20 | 2.00 | 4.39 | 11.16 | 30.91 | |
| R2L | 0.20 | 2.00 | 4.84 | 10.11 | 9.37 | |
| L2L | 0.13 | 2.00 | 6.75 | 7.27 | 29.29 | |
| R2L | 0.12 | 2.00 | 6.83 | 7.17 | 5.62 | |
| L2L | 0.12 | 2.00 | 6.94 | 7.05 | 33.03 | |
| R2L | 0.11 | 2.00 | 6.97 | 7.01 | 8.21 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Yuan, S.; Lin, X.; Hu, M.; Bian, Y.; Qin, Z. Space Discretization-Based Optimal Trajectory Planning for Automated Vehicles in Narrow Corridor Scenes. Electronics 2022, 11, 4239. https://doi.org/10.3390/electronics11244239
Xu B, Yuan S, Lin X, Hu M, Bian Y, Qin Z. Space Discretization-Based Optimal Trajectory Planning for Automated Vehicles in Narrow Corridor Scenes. Electronics. 2022; 11(24):4239. https://doi.org/10.3390/electronics11244239
Chicago/Turabian StyleXu, Biao, Shijie Yuan, Xuerong Lin, Manjiang Hu, Yougang Bian, and Zhaobo Qin. 2022. "Space Discretization-Based Optimal Trajectory Planning for Automated Vehicles in Narrow Corridor Scenes" Electronics 11, no. 24: 4239. https://doi.org/10.3390/electronics11244239
APA StyleXu, B., Yuan, S., Lin, X., Hu, M., Bian, Y., & Qin, Z. (2022). Space Discretization-Based Optimal Trajectory Planning for Automated Vehicles in Narrow Corridor Scenes. Electronics, 11(24), 4239. https://doi.org/10.3390/electronics11244239