


Simulation Study on Variable Pressure Margin Energy Recovery of Electric Loader Actuator

Abstract
1. Introduction
2. Working Principle of the System
2.1. Working Principle of the Conventional System
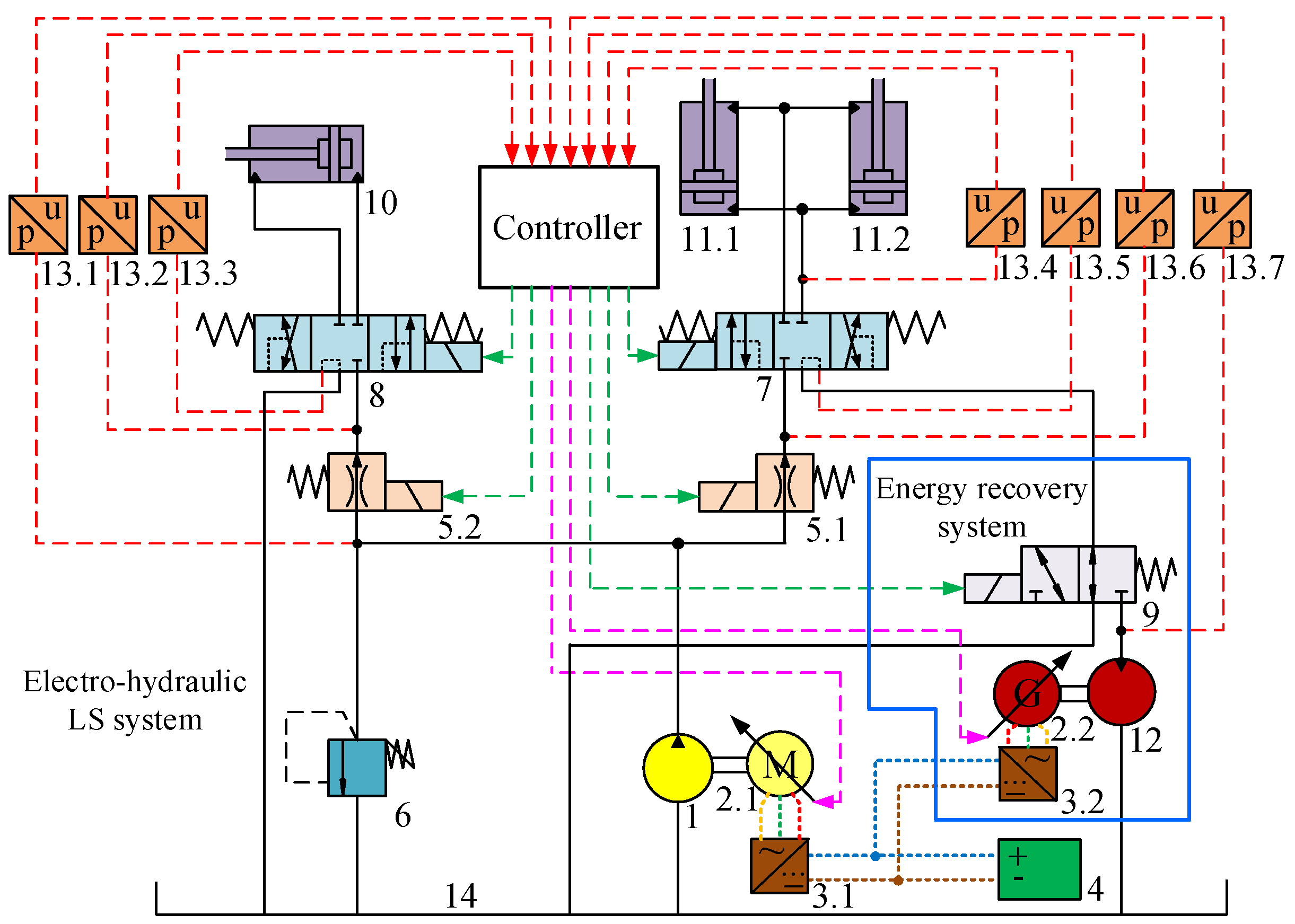
2.2. Working Principle of the New System
2.3. Control Strategy of the System
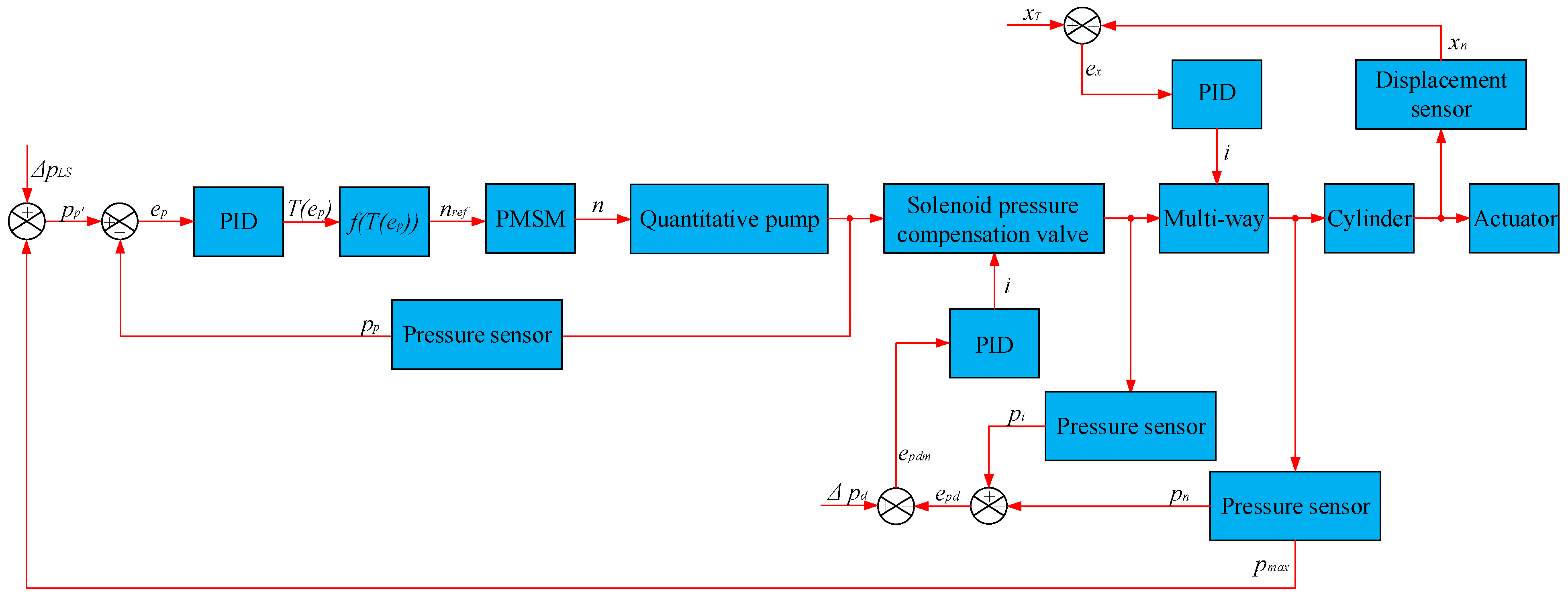
2.3.1. Principle of the Variable LS Pressure Margin Control
2.3.2. Principle of the Variable Pressure Margin Control of the Pressure Compensation Valve
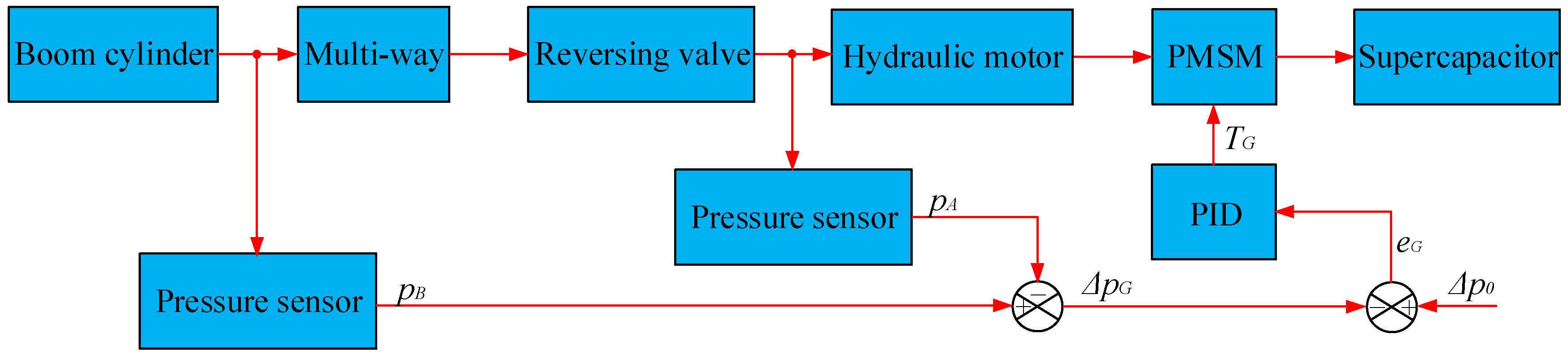
2.3.3. Control Principle of the Energy Recovery System
3. Analysis of the System Mathematical Model
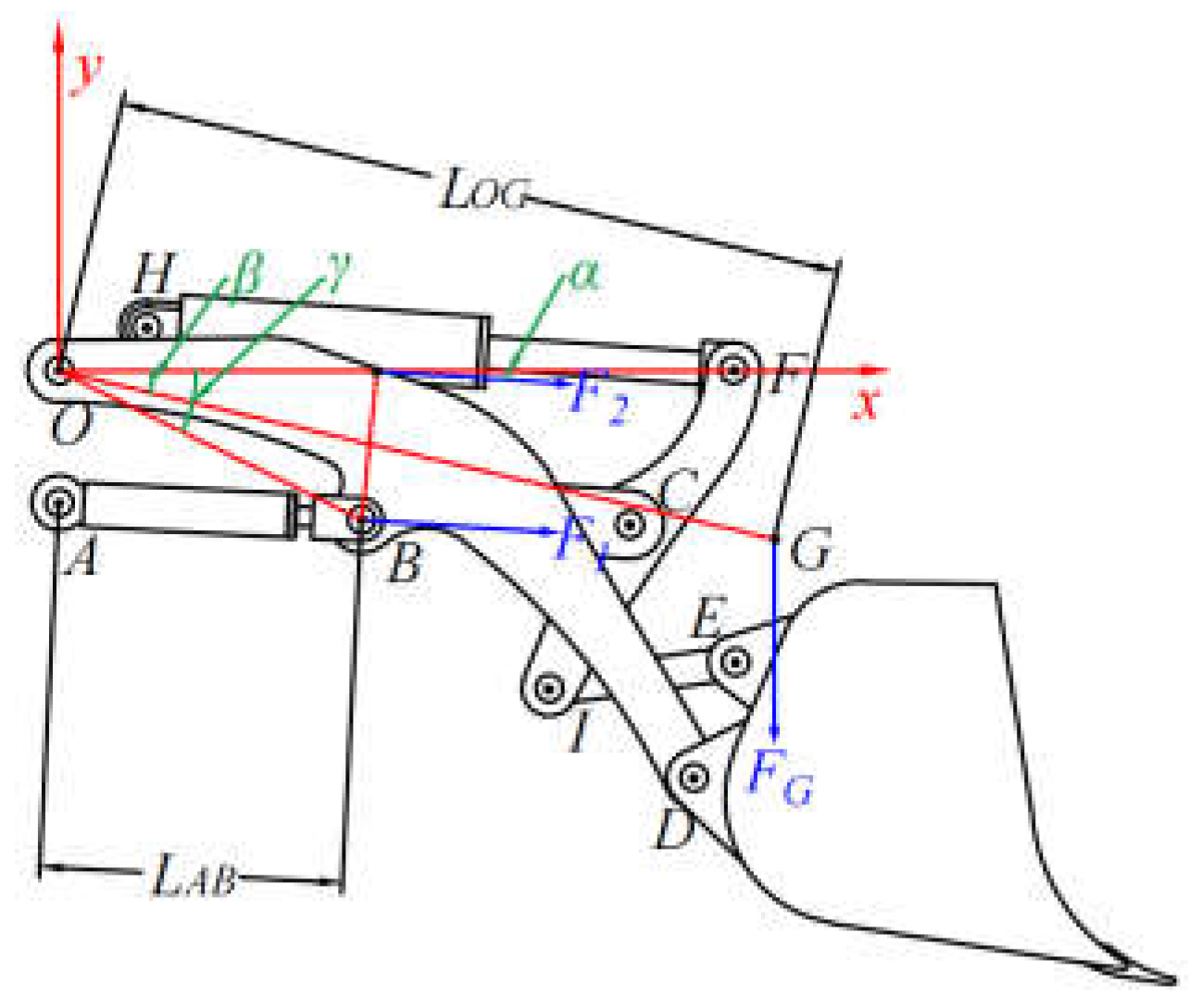
3.1. Analysis of the Mathematical Model of the Actuator
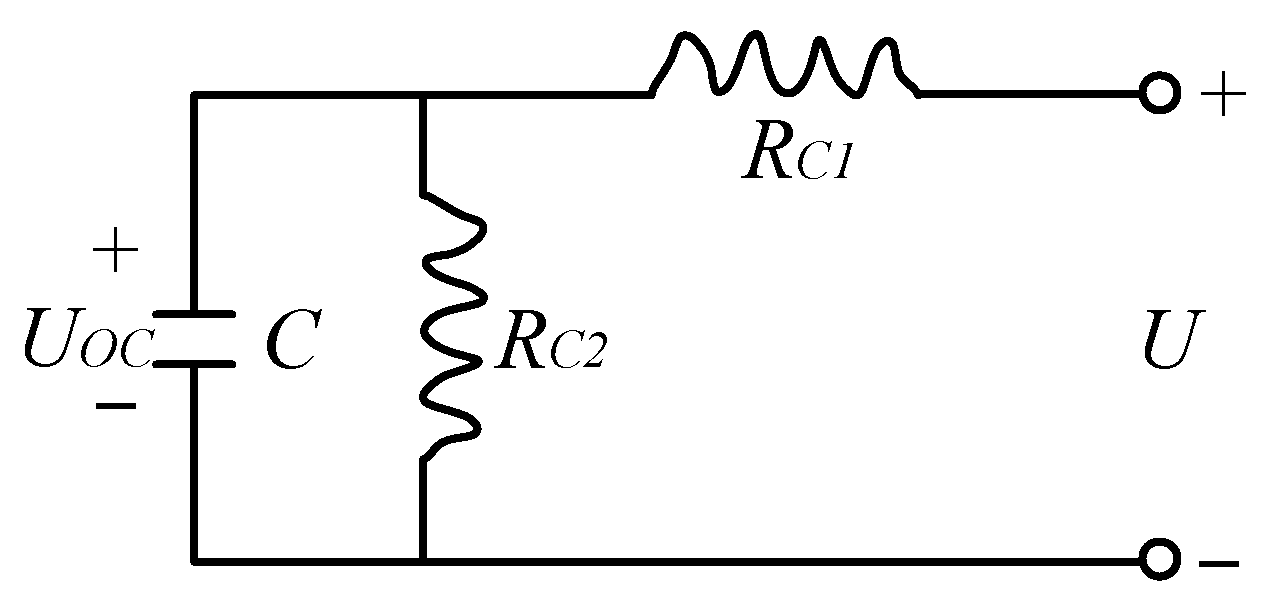
3.2. Analysis of the Mathematical Model of the Supercapacitor
3.3. Analysis and Validation of the PMSM Mathematical Model
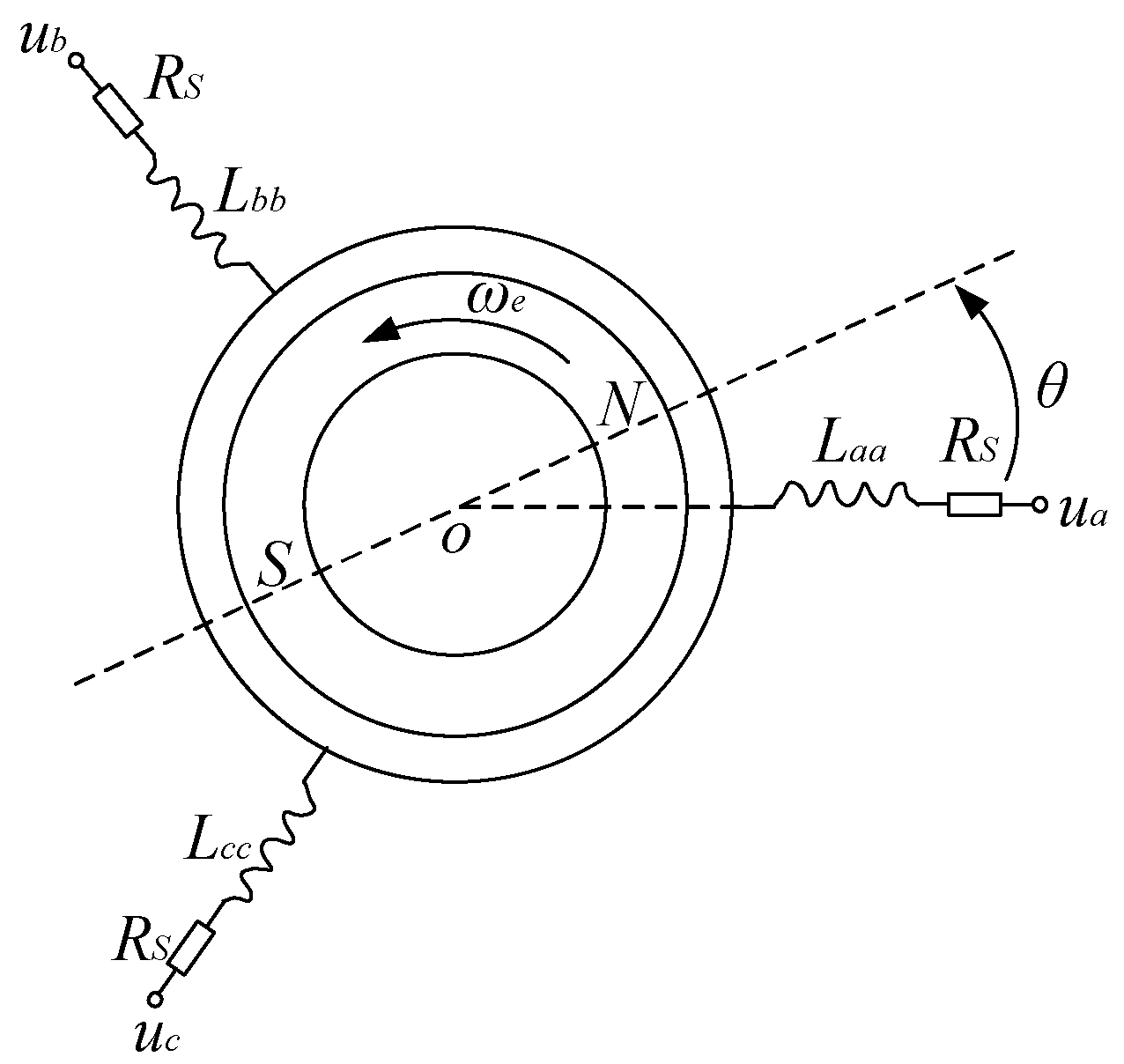
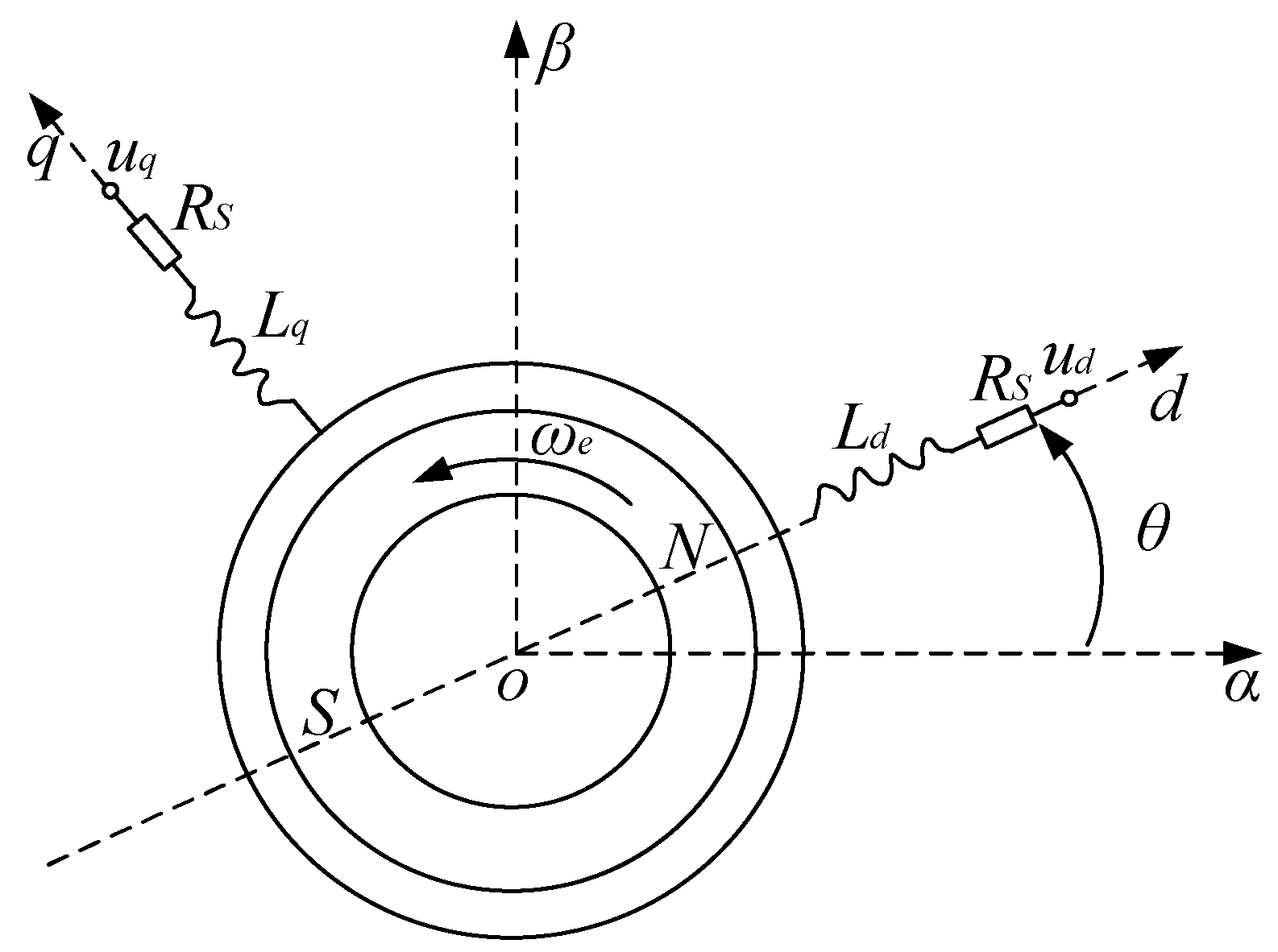
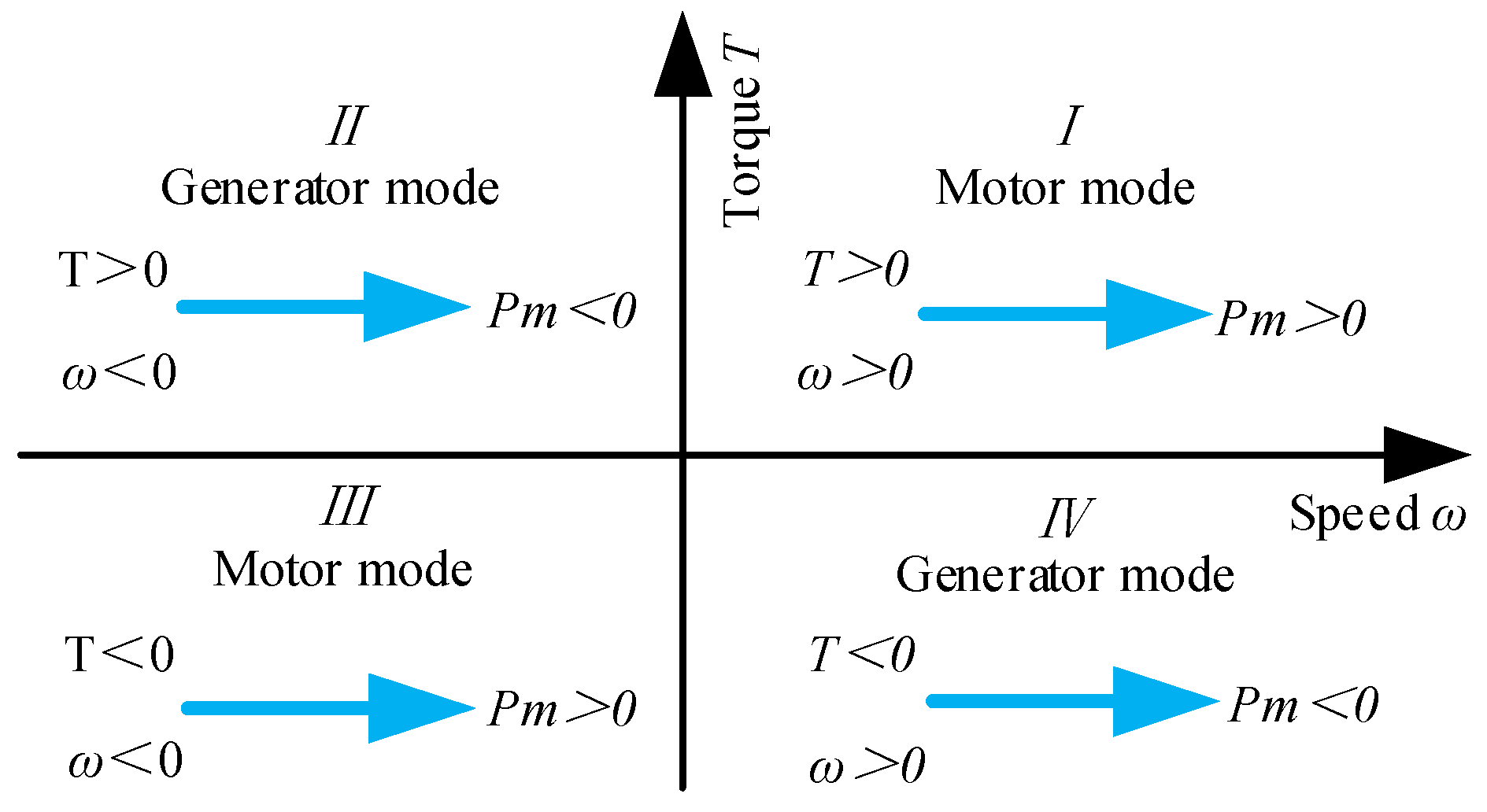
3.3.1. Analysis of the PMSM Mathematical Model
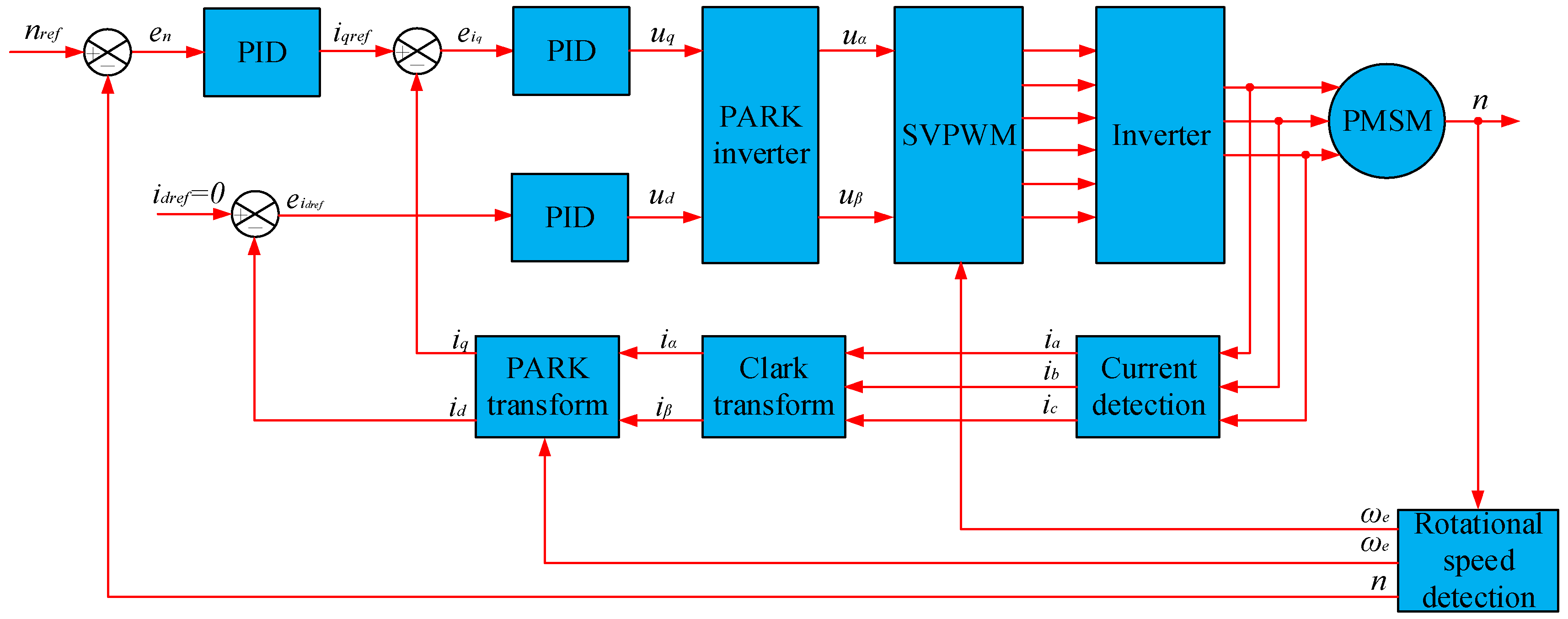
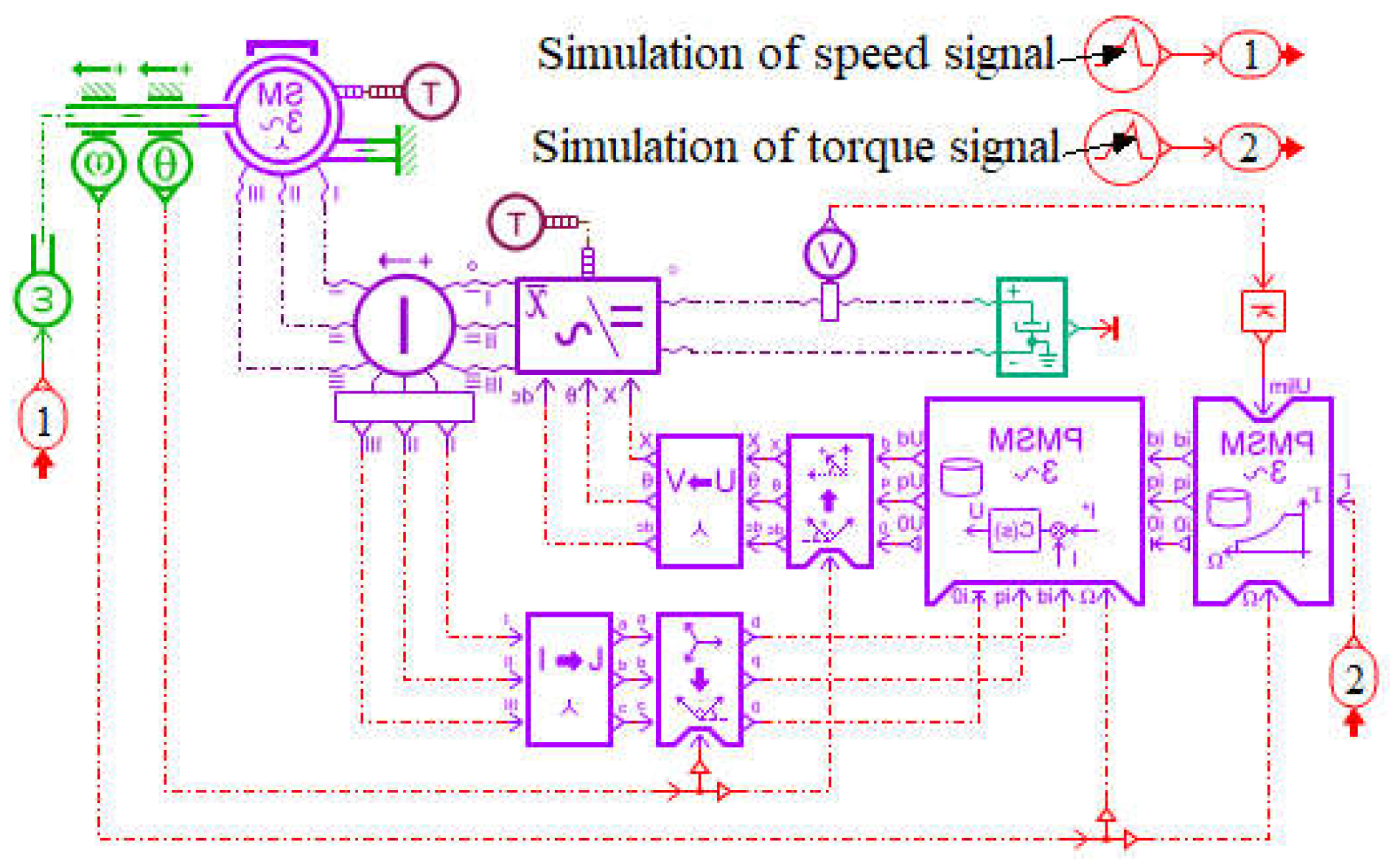
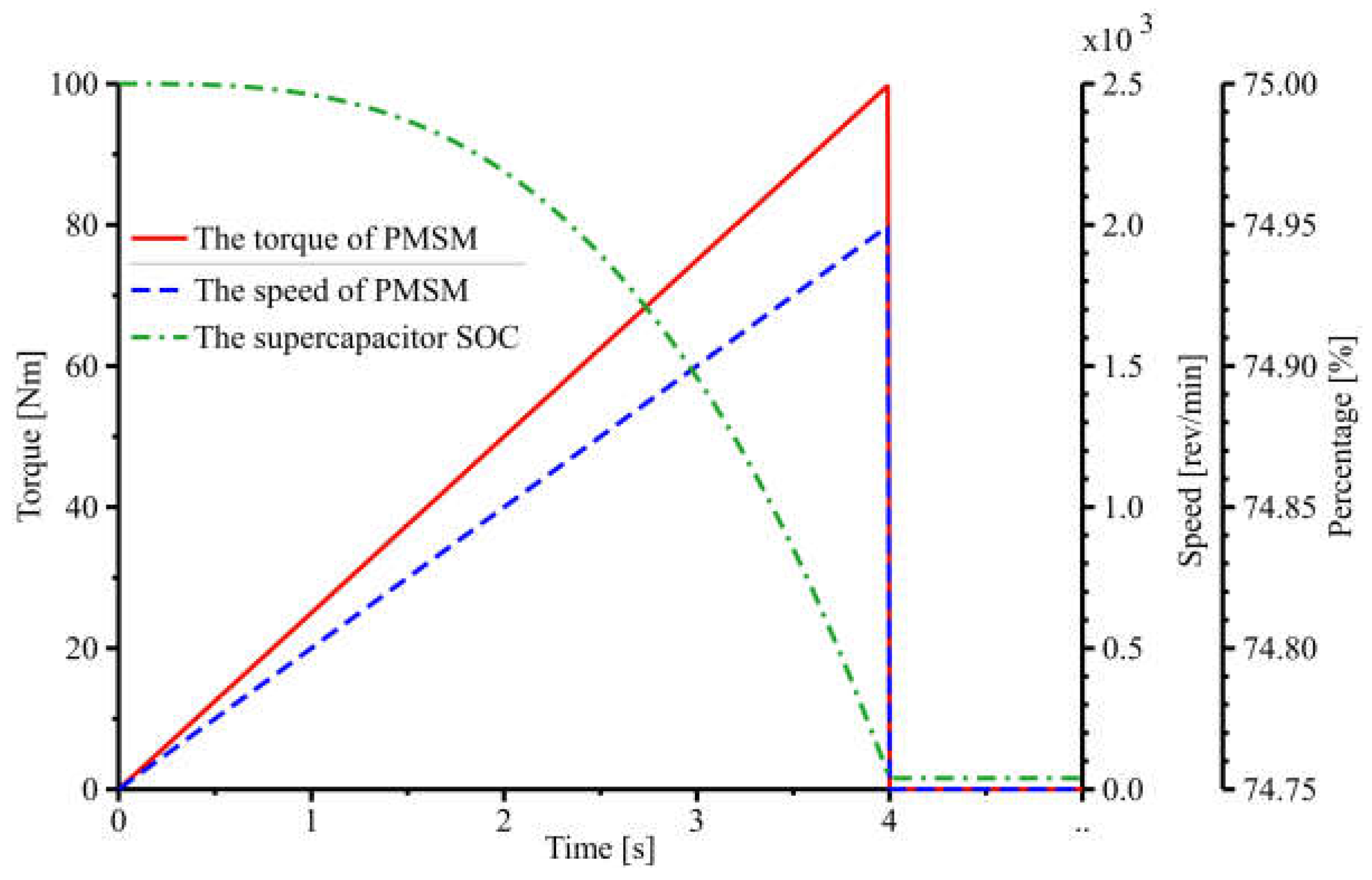
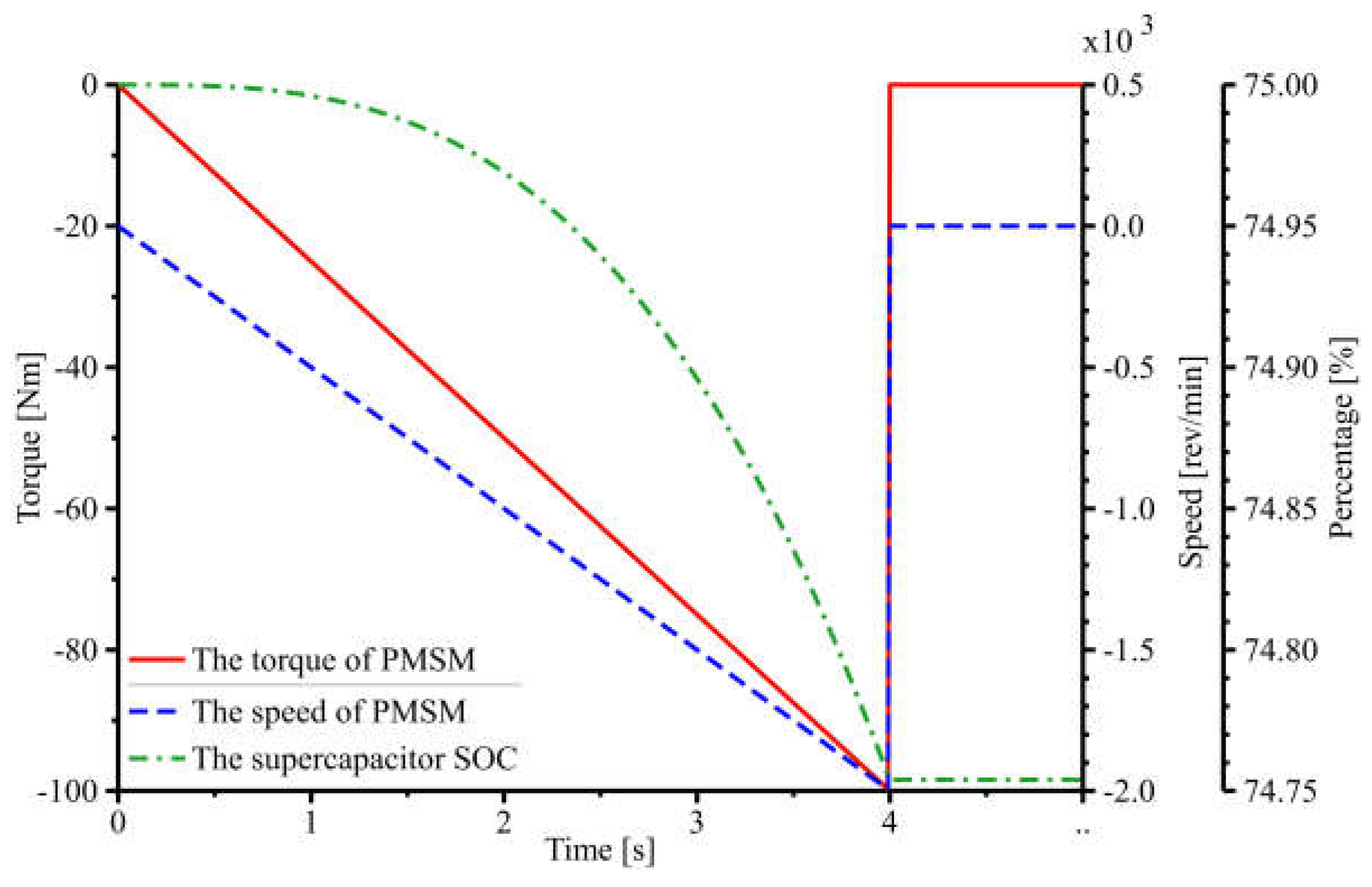
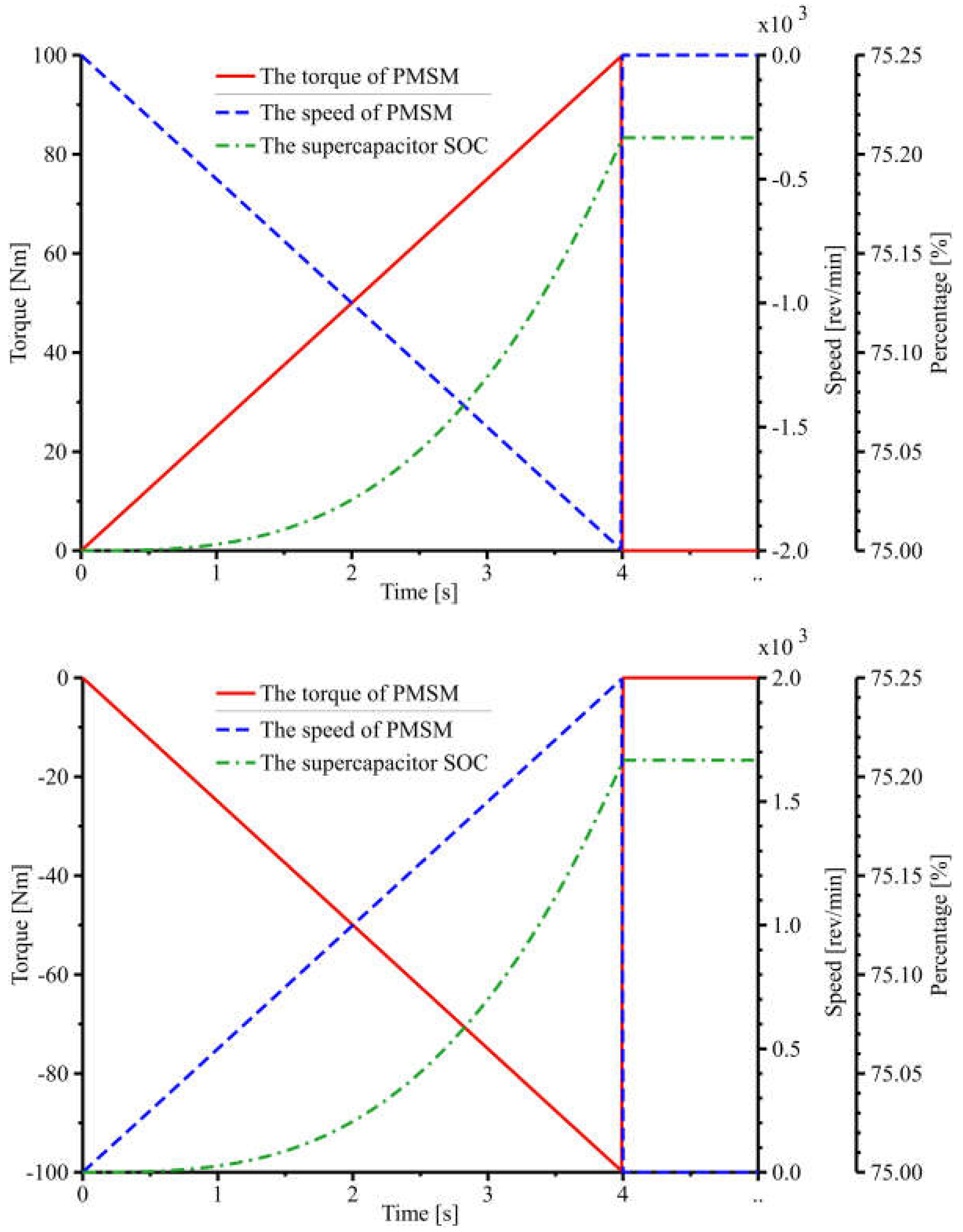
3.3.2. Validation of the PMSM Simulation Model
4. Modeling and Simulation of the System
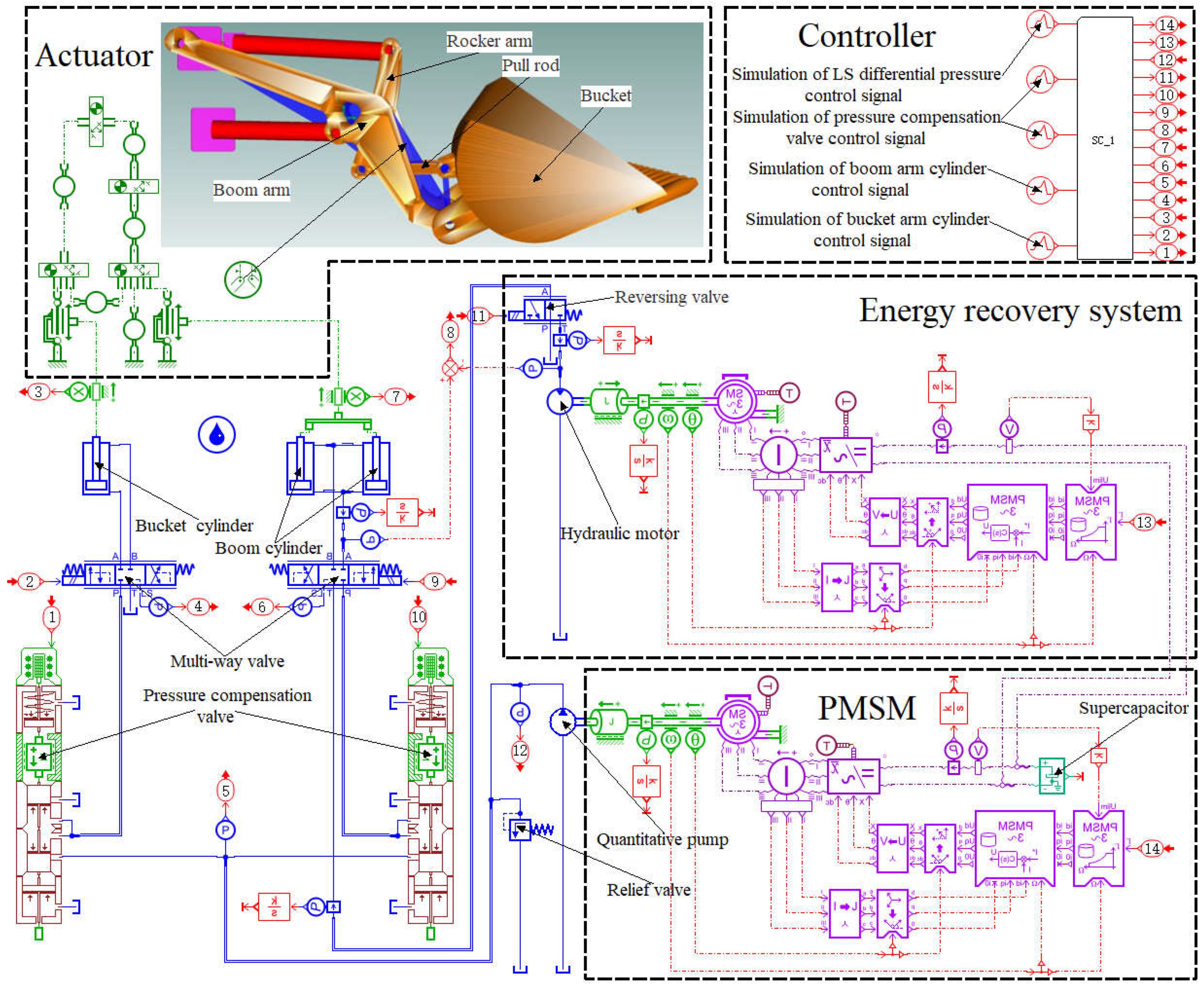
4.1. Modeling of the System
4.2. Simulation of the System
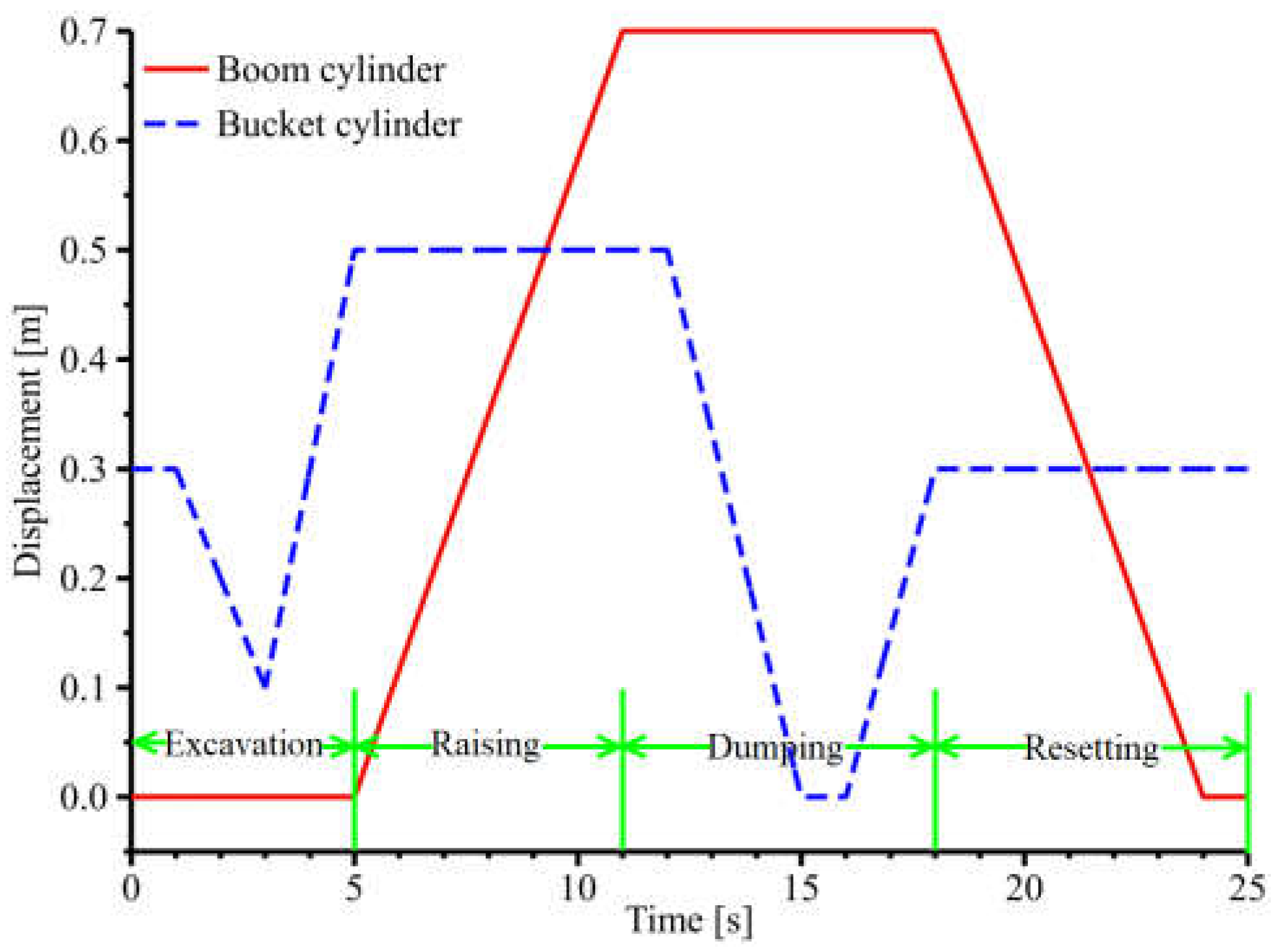
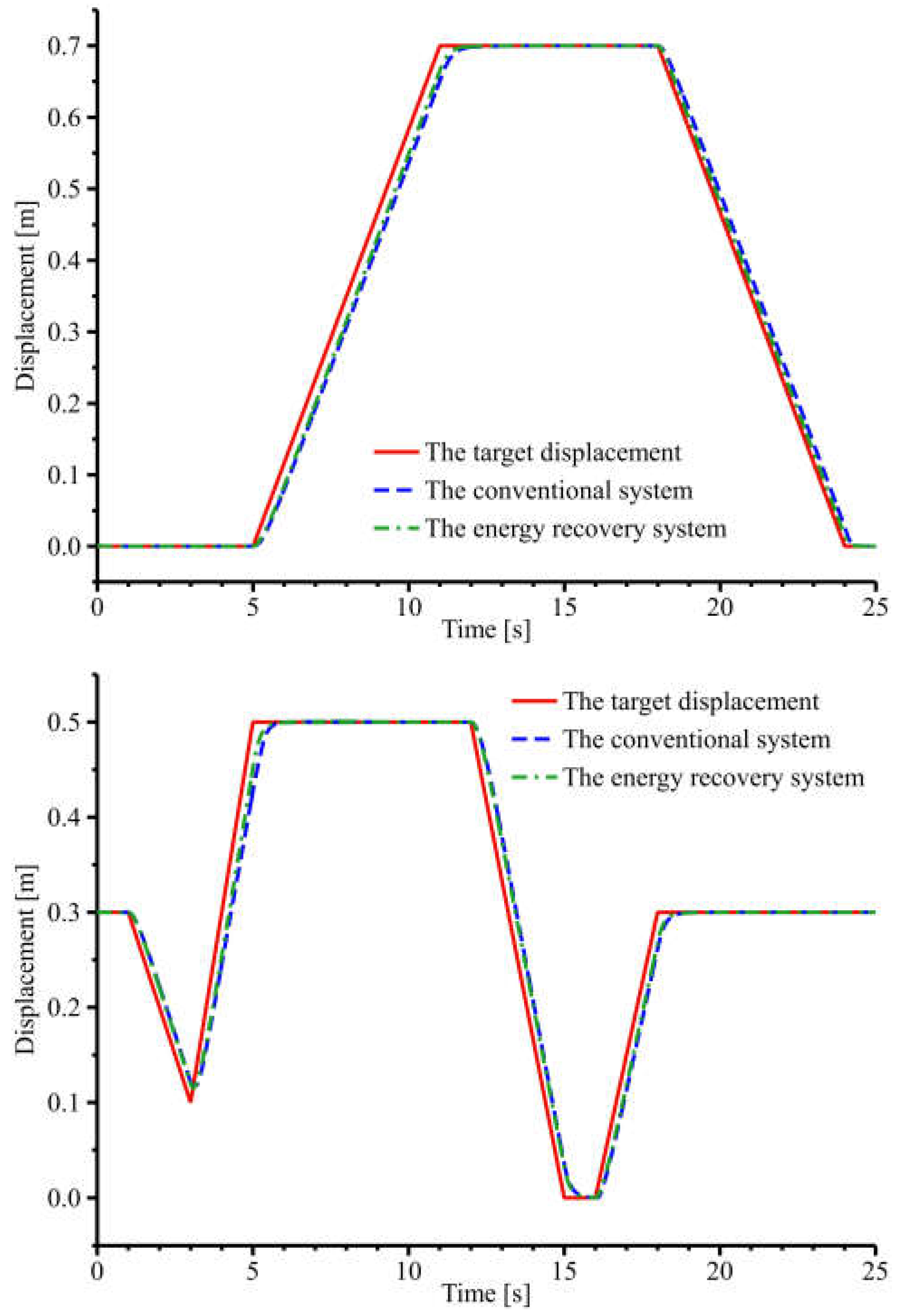
4.2.1. Analysis of the Characteristics of the Cylinder Displacement
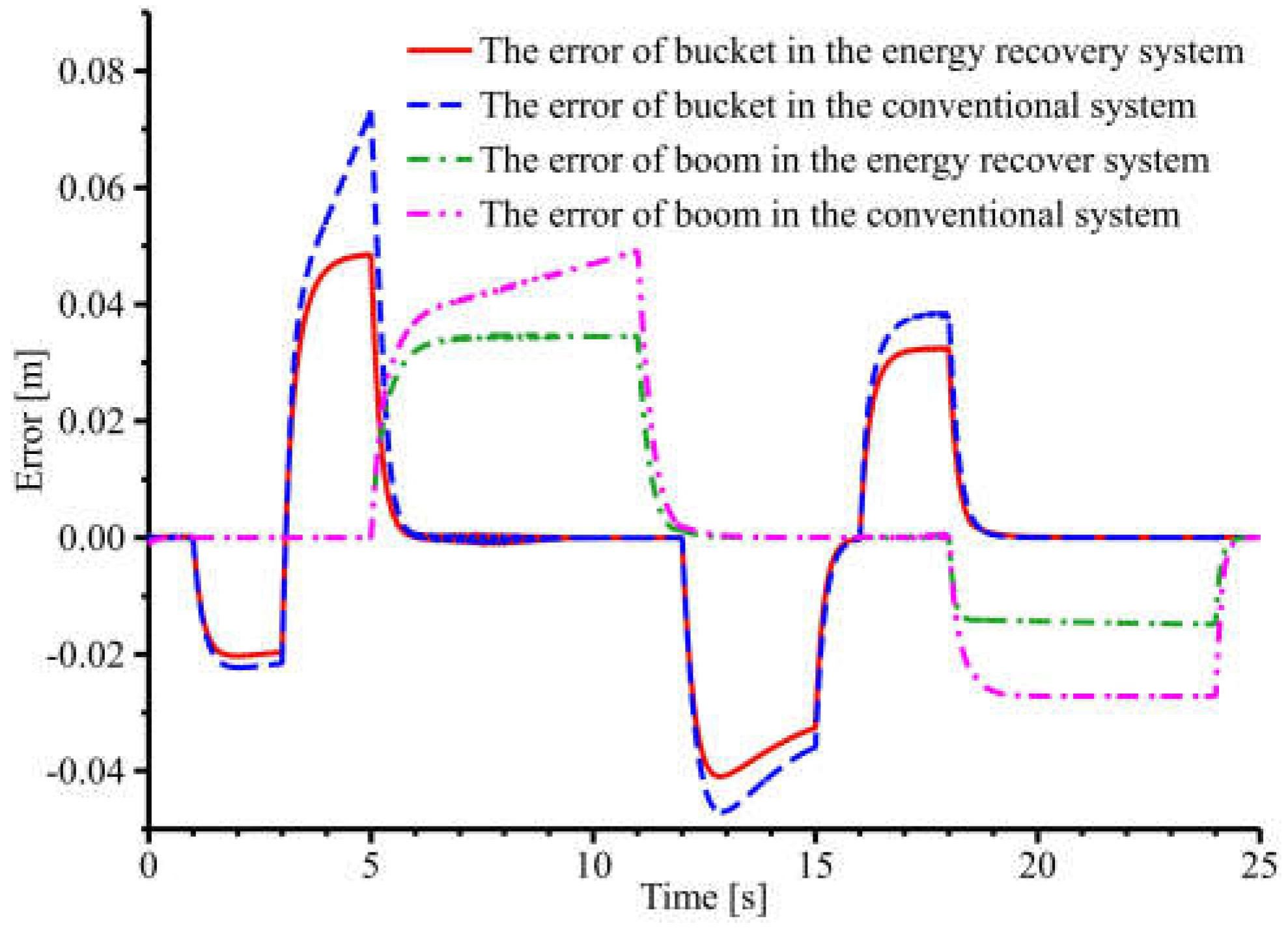
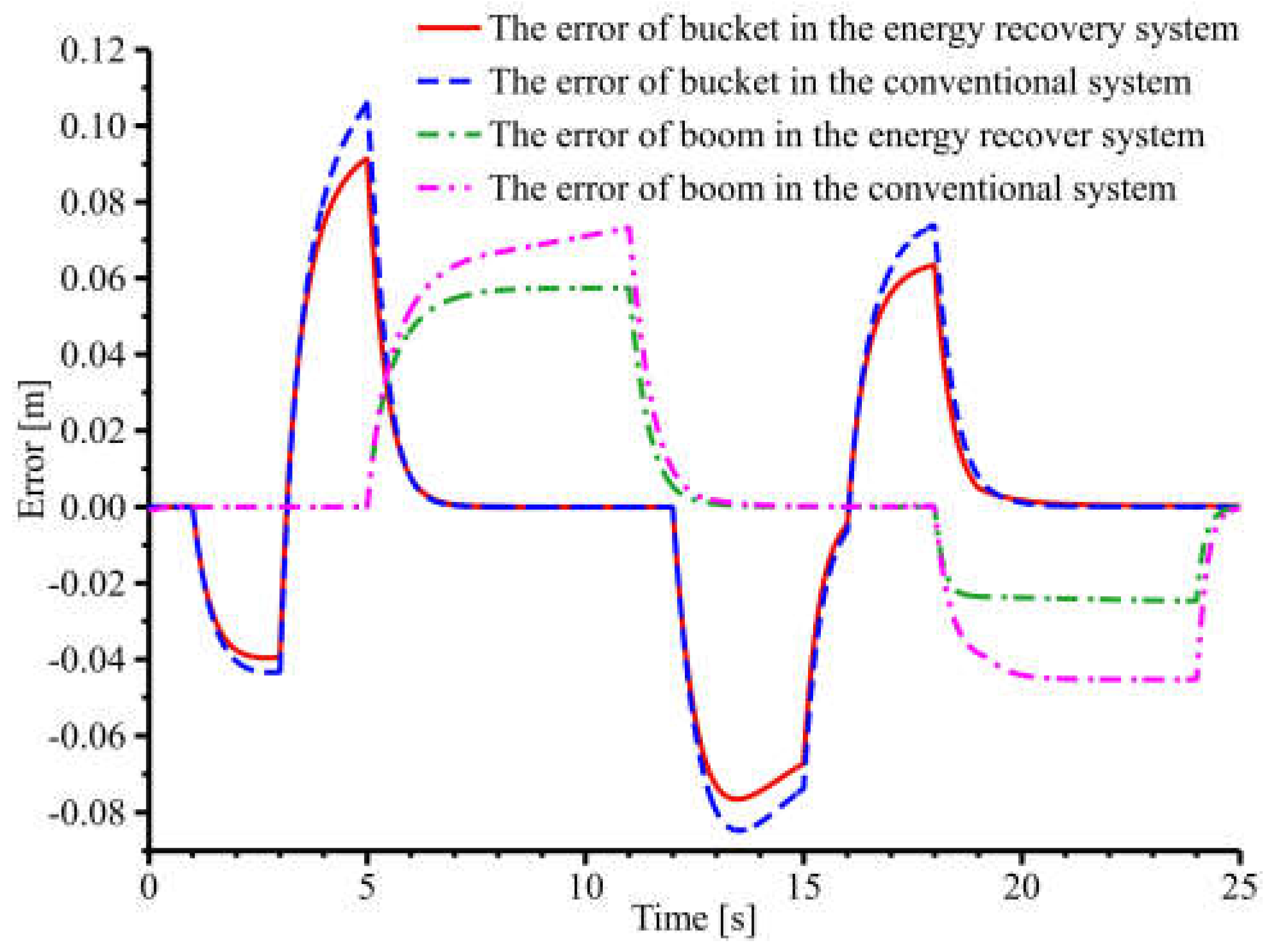
4.2.2. Analysis of the System Robustness
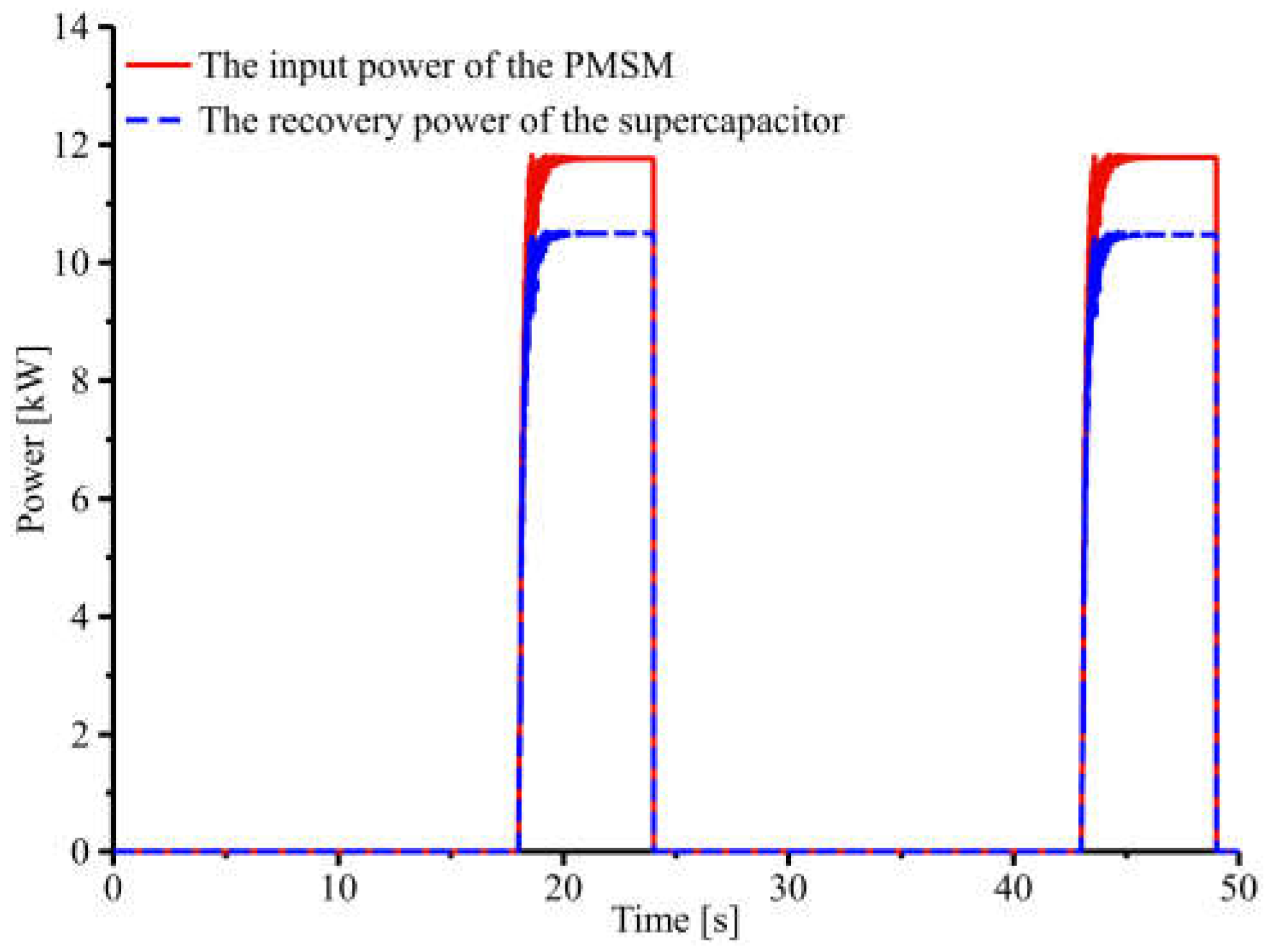
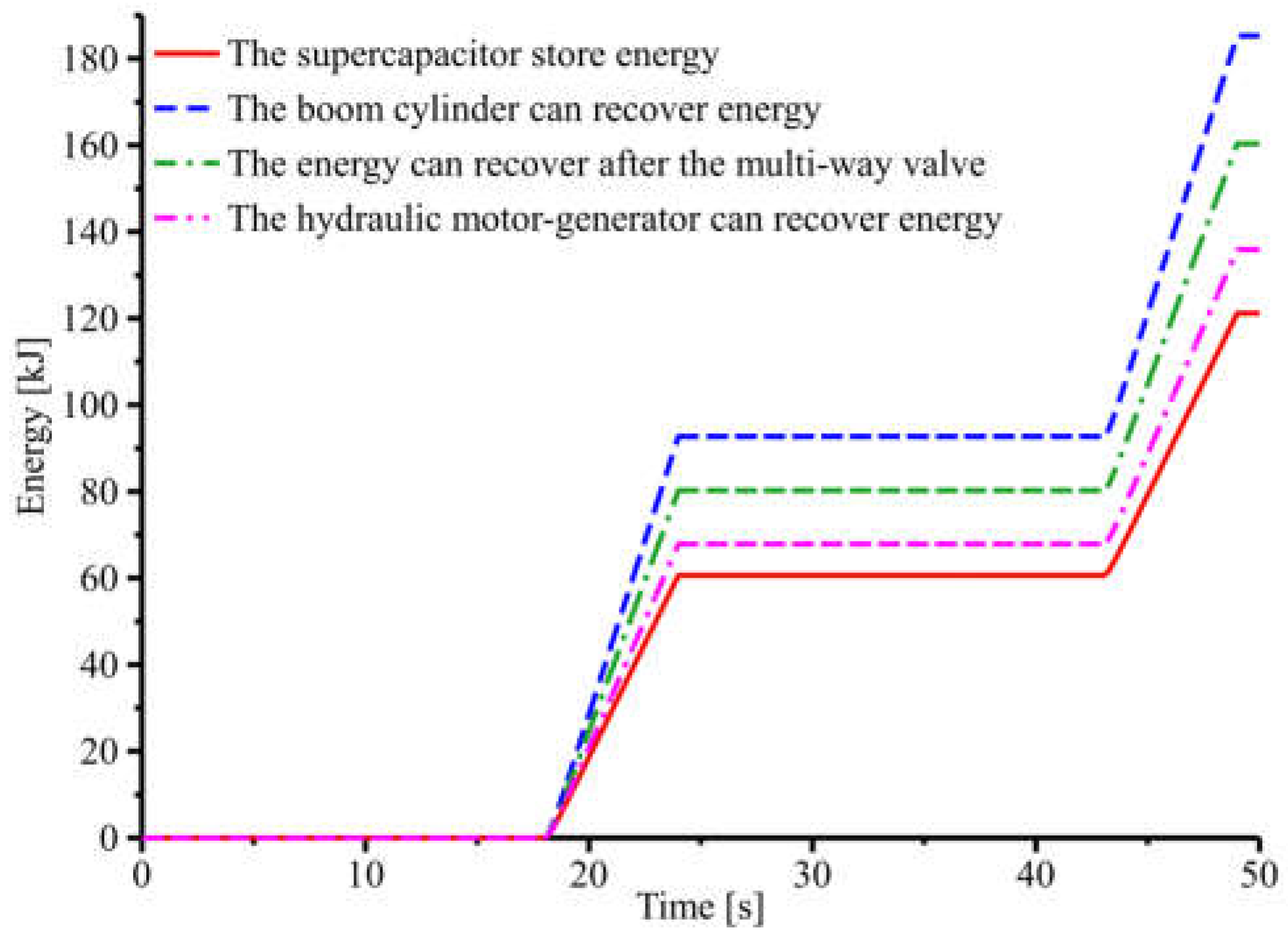
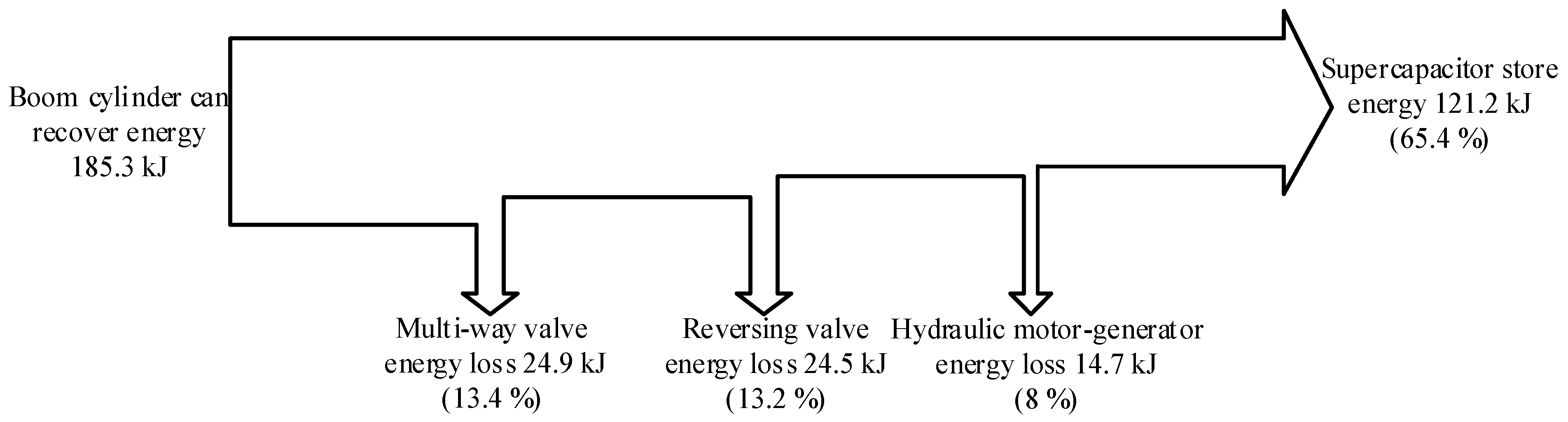
4.2.3. Analysis of the System Energy Recovery Performance
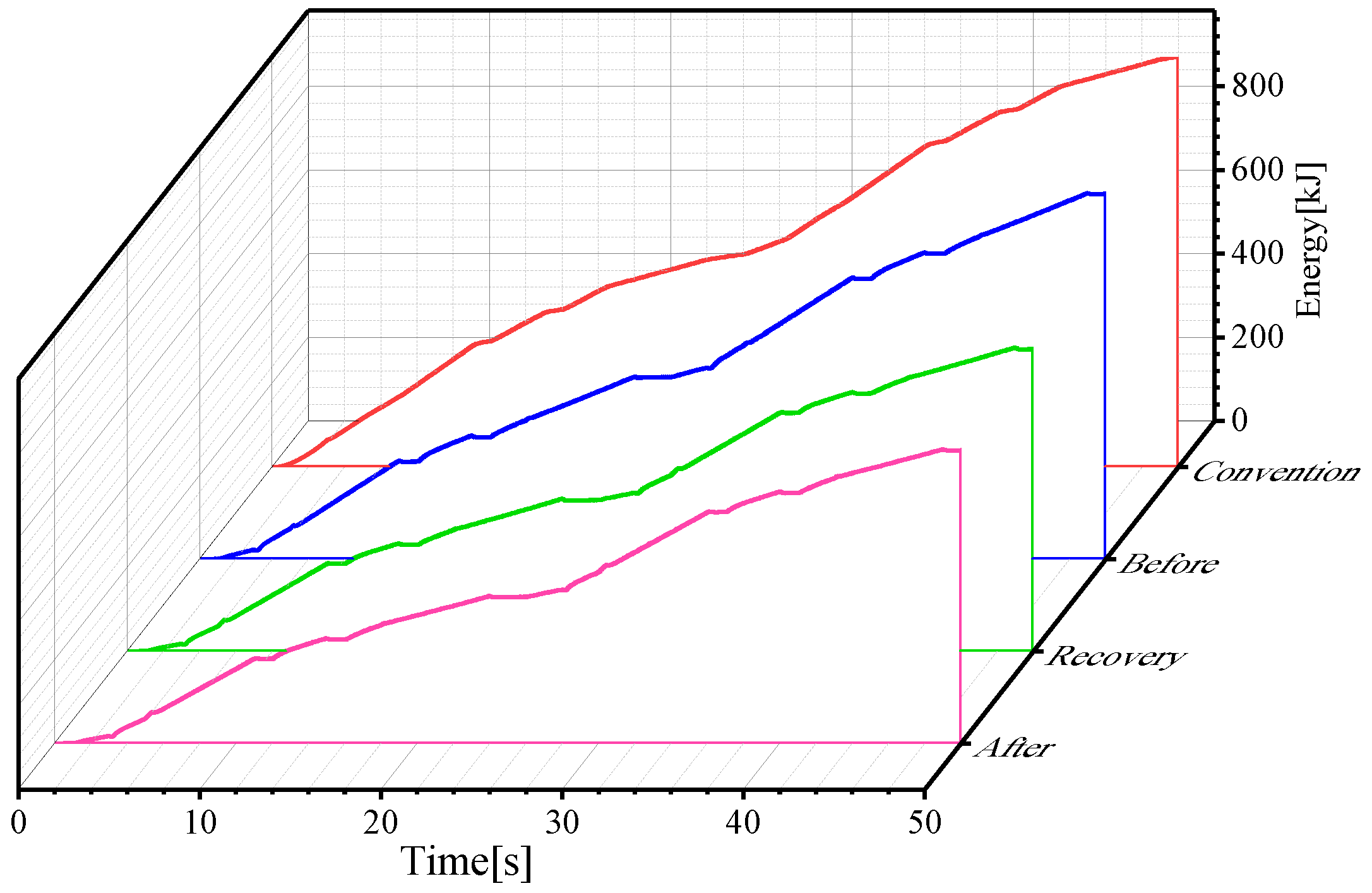
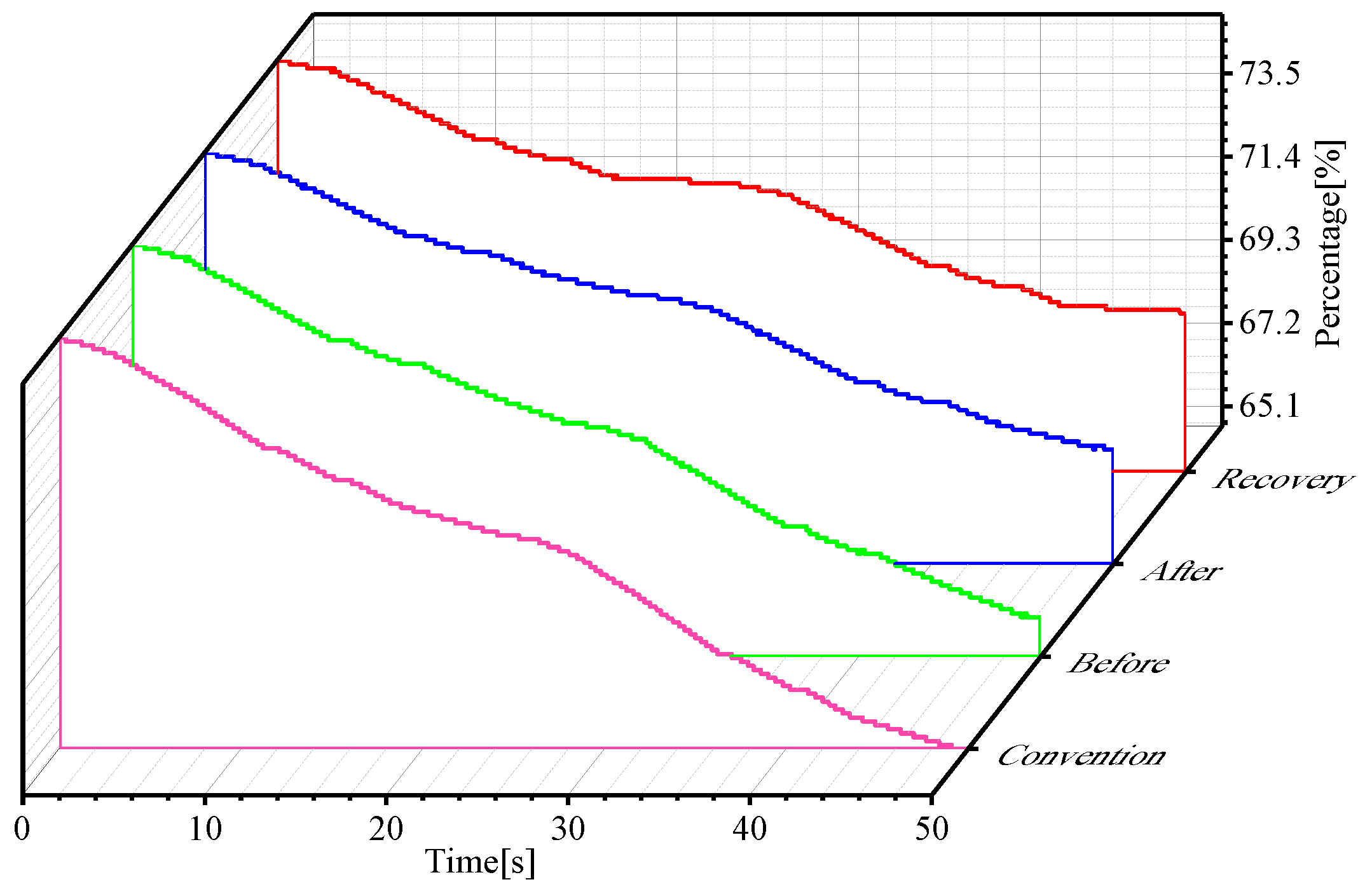
4.2.4. Analysis of the System Energy-Saving Performance
5. Discussion
6. Conclusions
- The energy recovery system’s transient performance is better than that of the conventional system.
- The energy recovery system effectively reduces the cylinder displacement error and has better robustness than the conventional system when the bucket material mass changes.
- The system has high energy recovery efficiency and good energy recovery performance, and the energy recovery efficiency is 65.4%.
- The variable pressure margin control is feasible and can effectively reduce the system pressure loss, thus reducing the system energy loss. The energy recovery system has less impact on the variable pressure margin control. The before, after, and energy recovery systems are more energy-saving than the conventional system.
- The variable pressure margin energy recovery system is feasible and can effectively reduce energy consumption than the conventional, before, and after systems.
- The energy recovery system has high energy-saving performance, and the energy-saving efficiency is 38.5%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lin, T. Energy-Saving Technology and Application of Construction Machinery; China Machine Press: Beijing, China, 2018. [Google Scholar]
- Lin, Y.; Lin, T.; Chen, Q.; Li, Z.; Fu, S.; Ren, H.; Guo, T. Research Progress on Key Technologies of Electric Construction Machinery. Chin. Hydraul. Pneum. 2021, 45, 1. [Google Scholar]
- Fan, Z.; Tao, P.; Dan, H.; Lin, J.; Mei, S. Modulated model predictive control of permanent magnet synchronous motor. In Proceedings of the 2018 IEEE International Conference on Industrial Electronics for Sustainable Energy Systems (IESES), Hamilton, New Zealand, 31 January–2 February 2018. [Google Scholar]
- Qin, D. Research and implementation of PMSM-DTC system. Master’s Thesis, Anhui University of Science and Technology, Anhui, China, 2018. [Google Scholar]
- Shi, Y.; Xu, S.; Sun, Z.; Nie, Y.; Wang, Y. Research on the Pressure Regulator Effect on a Pneumatic Vibration Isolation System. Chin. J. Mech. Eng. 2022, 35, 128. [Google Scholar] [CrossRef]
- Shi, Y.; Chang, J.; Wang, Y.; Zhao, X.; Zhang, Q.; Yang, L. Gas Leakage Detection and Pressure Difference Identification by Asymmetric Differential Pressure Method. Chin. J. Mech. Eng. 2022, 35, 44. [Google Scholar] [CrossRef]
- Chakraboity, A.K.; Sliamia, N. Control of permanent magnet synchronous motor (PMSM) using vector control approach. In Proceedings of the 2016 IEEE/PES Transmission and Distribution Conference and Exposition (T&D), Morelia, Mexico, 3–5 May 2016. [Google Scholar]
- Cao, B. Study on Dynamic Power Matching and Energy-saving Control Technology of Loaders with Bi-variable Hydraulic System. Ph.D. Thesis, Jilin University, Jilin, China, 2020. [Google Scholar]
- Yuan, S.; Yin, C.; Liu, S. Performance analysis of machinery load sensitive quantitative pump system. Trans. Chin. Soc. Agric. Eng. 2013, 29, 38–45. [Google Scholar]
- Pedersen, H.C.; Andersen, T.O.; Hansen, M.R. Load Sensing Systems—A Review of the Research Contributions Throughout the Last Decades. In Proceedings of the 4th IFK Workshop, Dresden, Germany, 25–26 March 2004; pp. 125–139. [Google Scholar]
- Vukovic, M.; Leifeld, R.; Murrenhoff, H. Reducing fuel consumption in hydraulic excavators—A comprehensive analysis. Energies 2017, 10, 687. [Google Scholar] [CrossRef]
- Cheng, M.; Zhang, J.; Xu, B.; Ding, R. An Electrohydraulic Load Sensing System based on flow/pressure switched control for mobile machinery. Isa Trans. 2020, 96, 367–375. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.; Cheng, M.; Ding, R.; Wang, F.; Xu, B.; Chen, B. Human–Robot Shared Control Based on Locally Weighted Intent Prediction for a Teleoperated Hydraulic Manipulator System. IEEE/ASME Trans. Mechatron. 2022. Early Access. [Google Scholar] [CrossRef]
- Na, W.; Qing, L.; Yan, S.; Shi, W.; Xian, Z.; Cheng, H.; Xun, J. Modeling and Simulation of an Invasive Mild Hypothermic Blood Cooling System. Chin. J. Mech. Eng. 2021, 34, 23. [Google Scholar]
- Zhang, F.; Zhang, J.; Cheng, M.; Xu, B. A Flow-Limited Rate Control Scheme for the Master–Slave Hydraulic Manipulator. IEEE Trans. Ind. Electron. 2021, 69, 4988–4998. [Google Scholar] [CrossRef]
- Fu, S.; Lin, T.; Wang, L.; Liao, C. Load Sensitive System Based on Variable Speed Control. China J. Highw. Transp. 2020, 33, 189. [Google Scholar]
- Madau, R.; Vacca, A.; Pintore, F. Energy Saving on a Full-Size Wheel Loader Through Variable Load Sense Margin Control. J. Dyn. Systems. Meas. Control 2022, 144, 031003. [Google Scholar] [CrossRef]
- Chen, Q.; Lin, T.; Ren, H.; Fu, S. Novel potential energy regeneration systems for hybrid hydraulic excavators. Math. Comput. Simul. (MATCOM) 2019, 163, 130–145. [Google Scholar] [CrossRef]
- Feng, J. Research on Characteristics of Three-chamber Hydraulic Cylinder Driving Loader Boom. Master’s Thesis, Taiyuan University of Technology, Taiyuan, China, 2019. [Google Scholar]
- Li, L.; Zhang, T.; Wu, K.; Lu, L.; Lin, L.; Xu, H. Design and Research on Electro-Hydraulic Drive and Energy Recovery System of the Electric Excavator Boom. Energies 2022, 15, 4757. [Google Scholar] [CrossRef]
- Wang, C. Research on Hybrid Pressure Compensated Hydraulic Control System. Master’s Thesis, Guizhou University, Guiyang, China, 2021. [Google Scholar]
- Wang, T. Study on Boom Energy Recovery Element and System of Hybrid Excavator. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2013. [Google Scholar]
- Zhang, X.; Wang, X.; Zhang, H.; Quan, L. Characteristics of Wheel Loader Lifting Device Based on Closed Pump-controlled Three-chamber Hydraulic Cylinder. Trans. Chin. Soc. Agric. Eng. 2019, 50, 410–418. [Google Scholar]
- Lin, T. Research on the Potential Energy Recovery System Based on the Hybrid Hydraulic Excavator. Ph.D. Thesis, Zhejiang University, Hangzhou, China, 2011. [Google Scholar]
- Wu, S.; Wang, W.; Wang, H.; Yuan, J. Study on hybrid energy storage control strategy based on quadratic exponential smoothing. Mod. Electron. Tech. 2022, 45, 133–138. [Google Scholar]
- Wei, X. Research on Dual-variable Control Algorithm of Electro-hydrostatic Actuator. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2020. [Google Scholar]
- Liu, X. Study on Energy characteristics of Working Device Hydraulic System for 50-type Loaders. Master’s Thesis, Jilin University, Changchun, China, 2017. [Google Scholar]
- Wang, K. The Working Characteristics and Energy Consumption Analysis of the 50 Wheel loader’s Hydraulic System. Master’s Thesis, Jilin University, Changchun, China, 2011. [Google Scholar]
- Luo, K. Simulation model and test verification of loader working device and its electro-hydraulic control system. Master’s Thesis, Zhejiang University, Hangzhou, China, 2020. [Google Scholar]
- Fu, S.; Wang, L.; Lin, T. Control of electric drive powertrain based on variable speed control in construction machinery. Autom. Constr. 2020, 119, 103281. [Google Scholar] [CrossRef]
- Chi, B. Analysis of Energy Recovery System for Electric Excavator. Hydraul. Pneum. Seals 2022, 42, 56–61. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Name of Parameters | Value |
|---|---|---|
| PMSM | Rated speed | 2000 rev/min |
| Efficiency | 95% | |
| Quantitative pump | Displacement | 150 cm3/rev |
| Efficiency | 90% | |
| Boom cylinder | The diameter of piston | 0.165 m |
| The diameter of rod | 0.08 m | |
| The length of stroke | 0.757 m | |
| Bucket cylinder | The diameter of piston | 0.2 m |
| The diameter of rod | 0.1 m | |
| The length of stroke | 0.54 m | |
| Bucket | Mass | 1433.8 kg |
| Pressure compensation valve | Pressure range | 10~15 bar |
| LS | Pressure range | 20~25 bar |
| Energy recovery system | Preset differential pressure | 1 bar |
| Multi-way valve | Valve rated current | 40 mA |
| Valve natural frequency | 80 Hz | |
| Hydraulic motor | Displacement | 100 mL/rev |
| Efficiency | 90% | |
| Supercapacitor | Open circuit Voltage | 375 V |
| Capacitance | 40 F | |
| Initial charge | 18,000 C | |
| Maximum charge | 24,000 C | |
| Relief valve | Preset pressure | 170 bar |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mu, H.; Luo, Y.; Luo, Y.; Chen, L. Simulation Study on Variable Pressure Margin Energy Recovery of Electric Loader Actuator. Electronics 2022, 11, 4215. https://doi.org/10.3390/electronics11244215
Mu H, Luo Y, Luo Y, Chen L. Simulation Study on Variable Pressure Margin Energy Recovery of Electric Loader Actuator. Electronics. 2022; 11(24):4215. https://doi.org/10.3390/electronics11244215
Chicago/Turabian StyleMu, Hongyun, Yanlei Luo, Yu Luo, and Lunjun Chen. 2022. "Simulation Study on Variable Pressure Margin Energy Recovery of Electric Loader Actuator" Electronics 11, no. 24: 4215. https://doi.org/10.3390/electronics11244215
APA StyleMu, H., Luo, Y., Luo, Y., & Chen, L. (2022). Simulation Study on Variable Pressure Margin Energy Recovery of Electric Loader Actuator. Electronics, 11(24), 4215. https://doi.org/10.3390/electronics11244215