
Intelligent Fault Diagnosis Method for Industrial Processing Equipment by ICECNN-1D


Abstract
1. Introduction
2. Fault Diagnosis Method Based on ICECNNN-1D
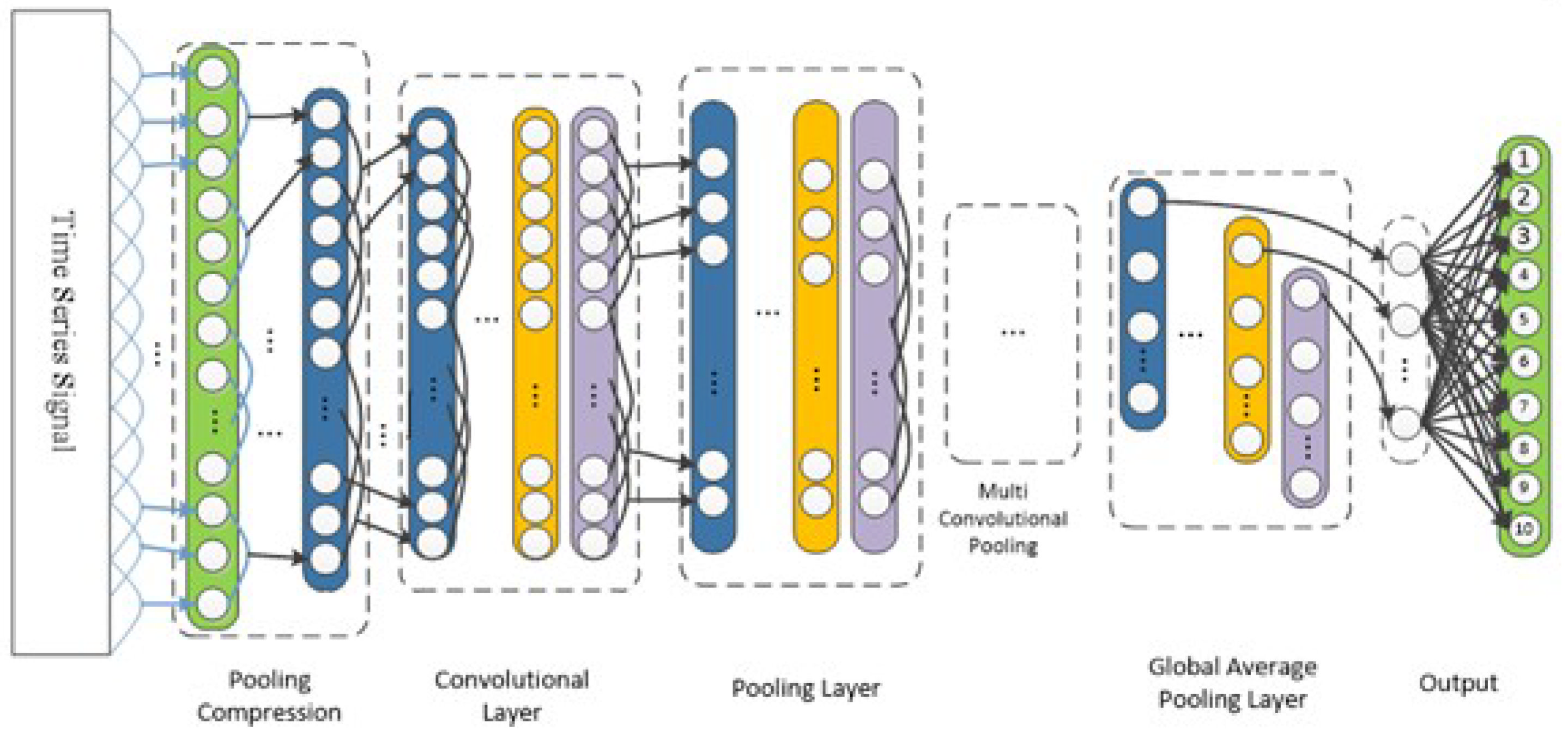
2.1. Basic Concept of Convolutional Neural Network with Compression Enhancement
2.2. Audio–Visual Information Fusion Methods Based on One-Dimensional Signal
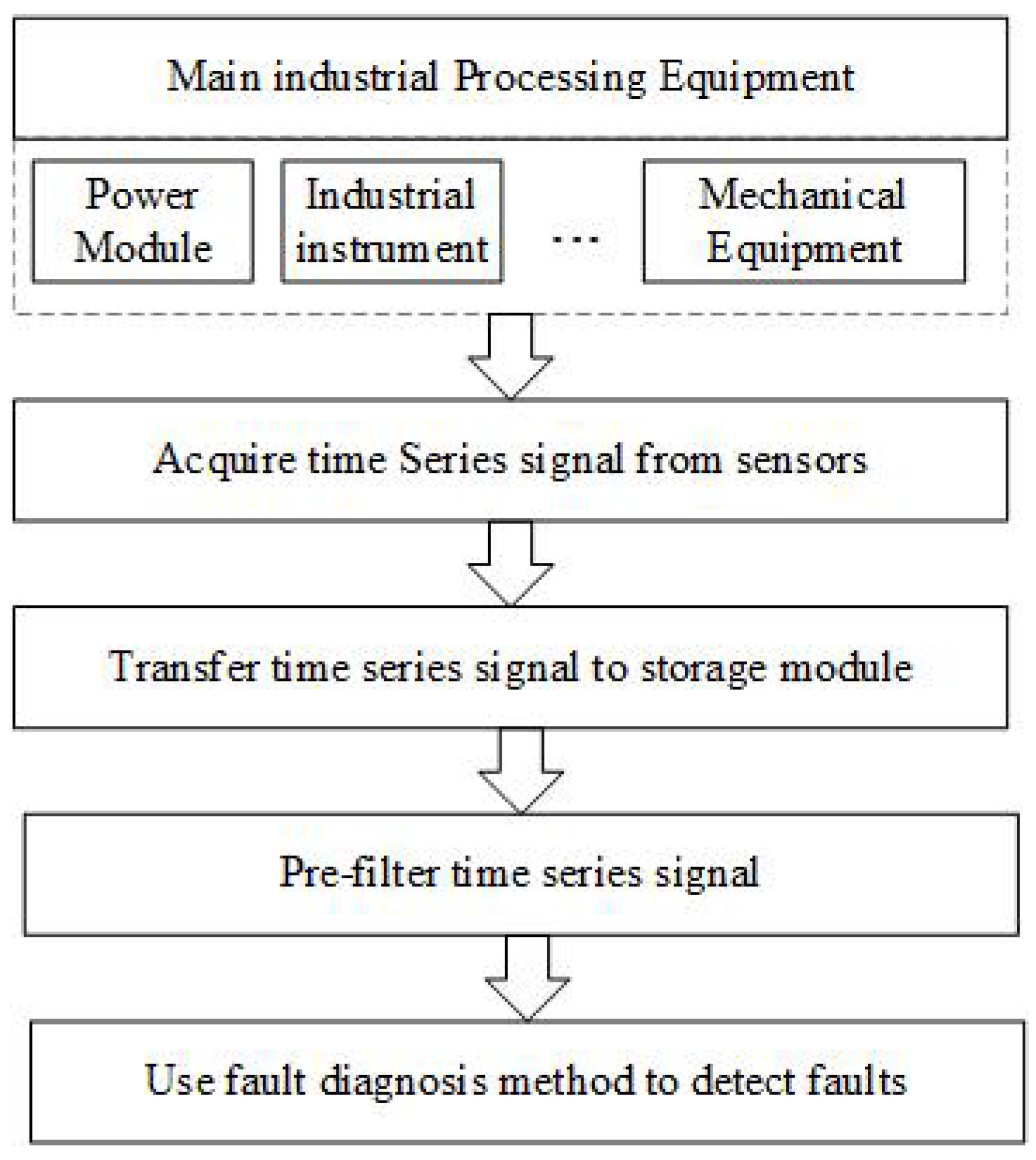
2.3. Working Principle Equipment Fault Diagnosis System
3. Intelligent Equipment Fault Diagnosis Experimental Scheme
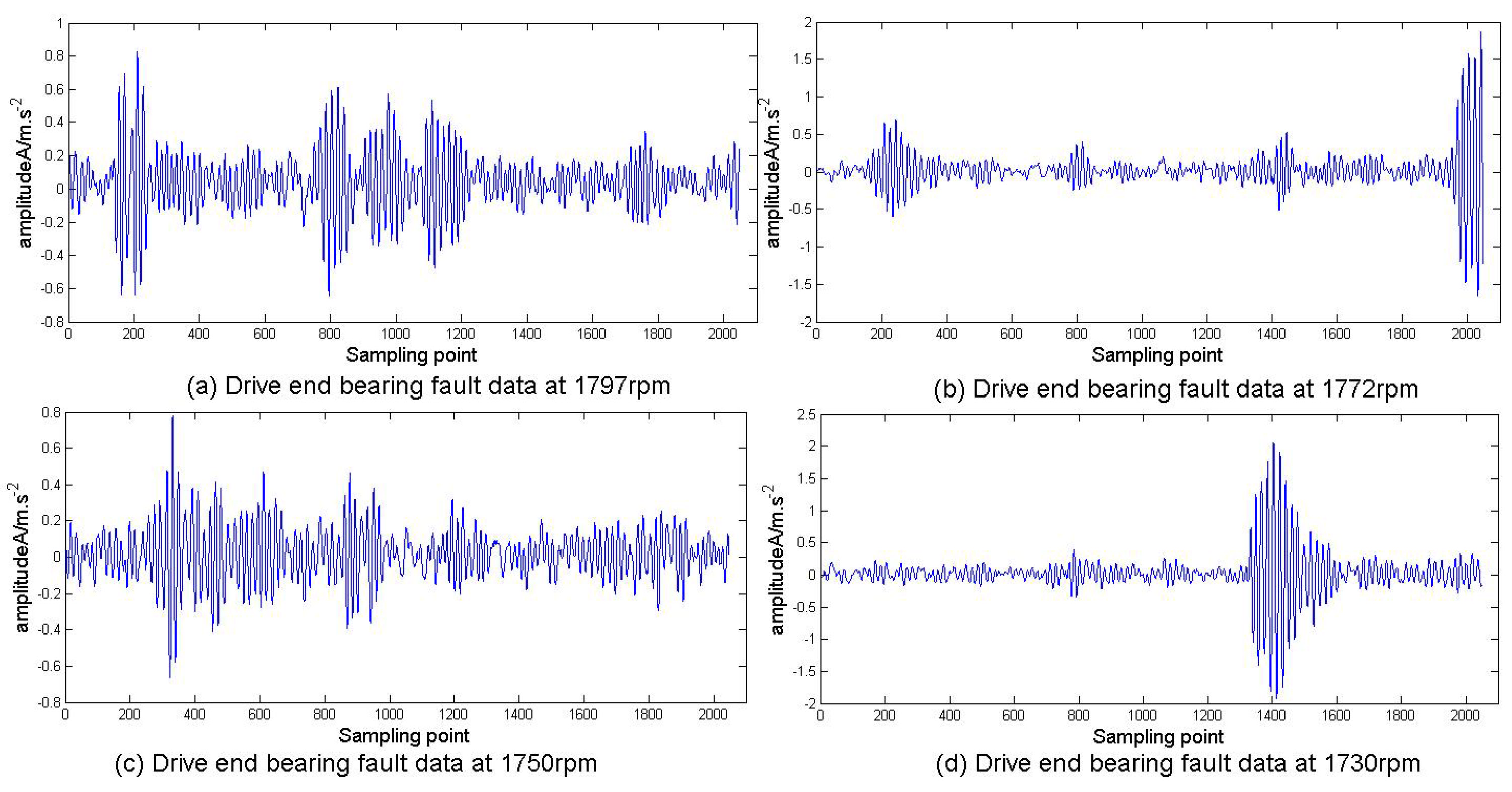
3.1. Experiment 1: Fault Diagnosis Effect of ICECNN-1D of High Frequency Time Series Signal
3.2. Experiment 2: Performance under Different Compression Sizes
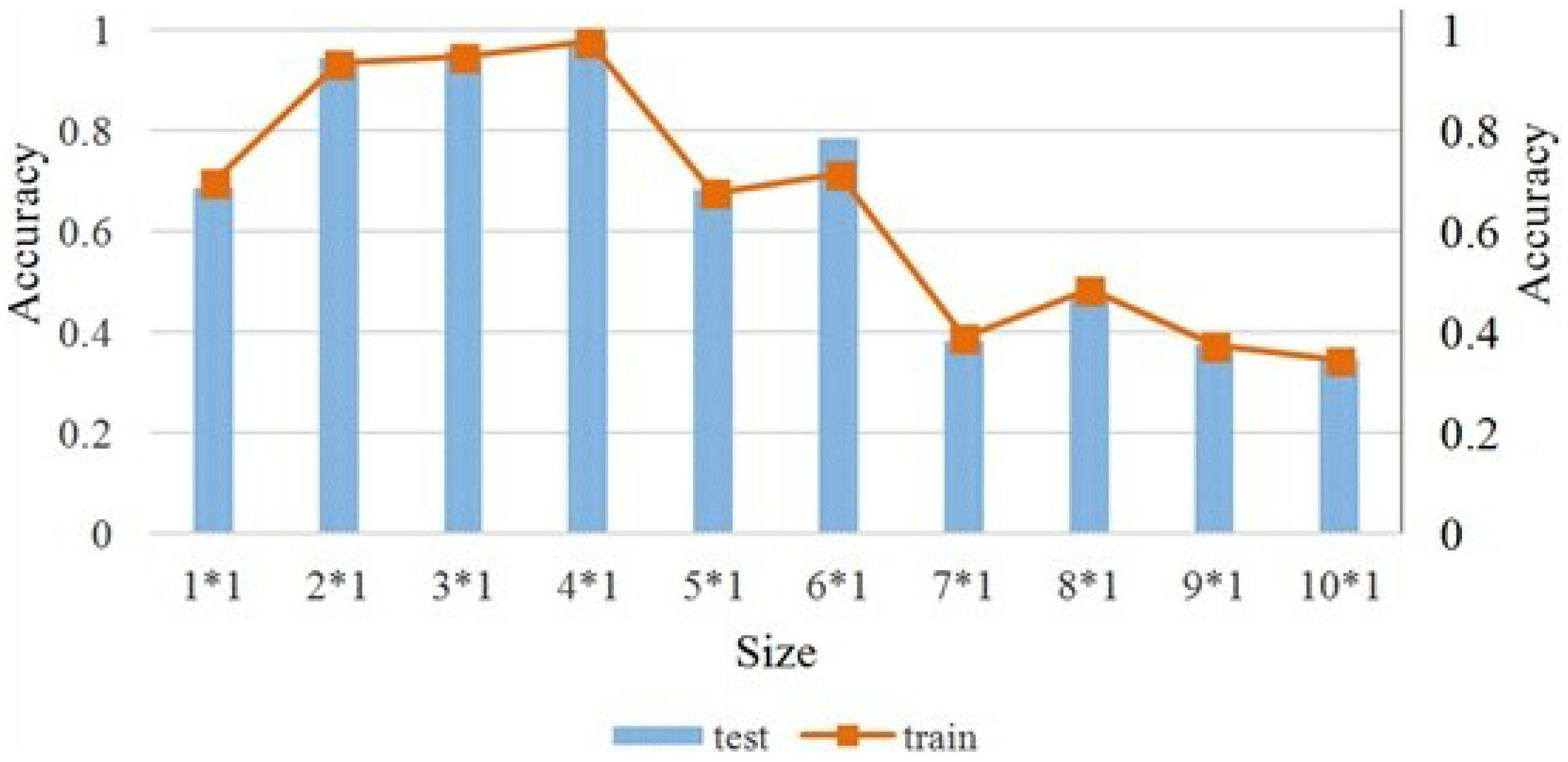
3.3. Performance of the First Convolutional Layer in Different Sizes of Convolution Kernels
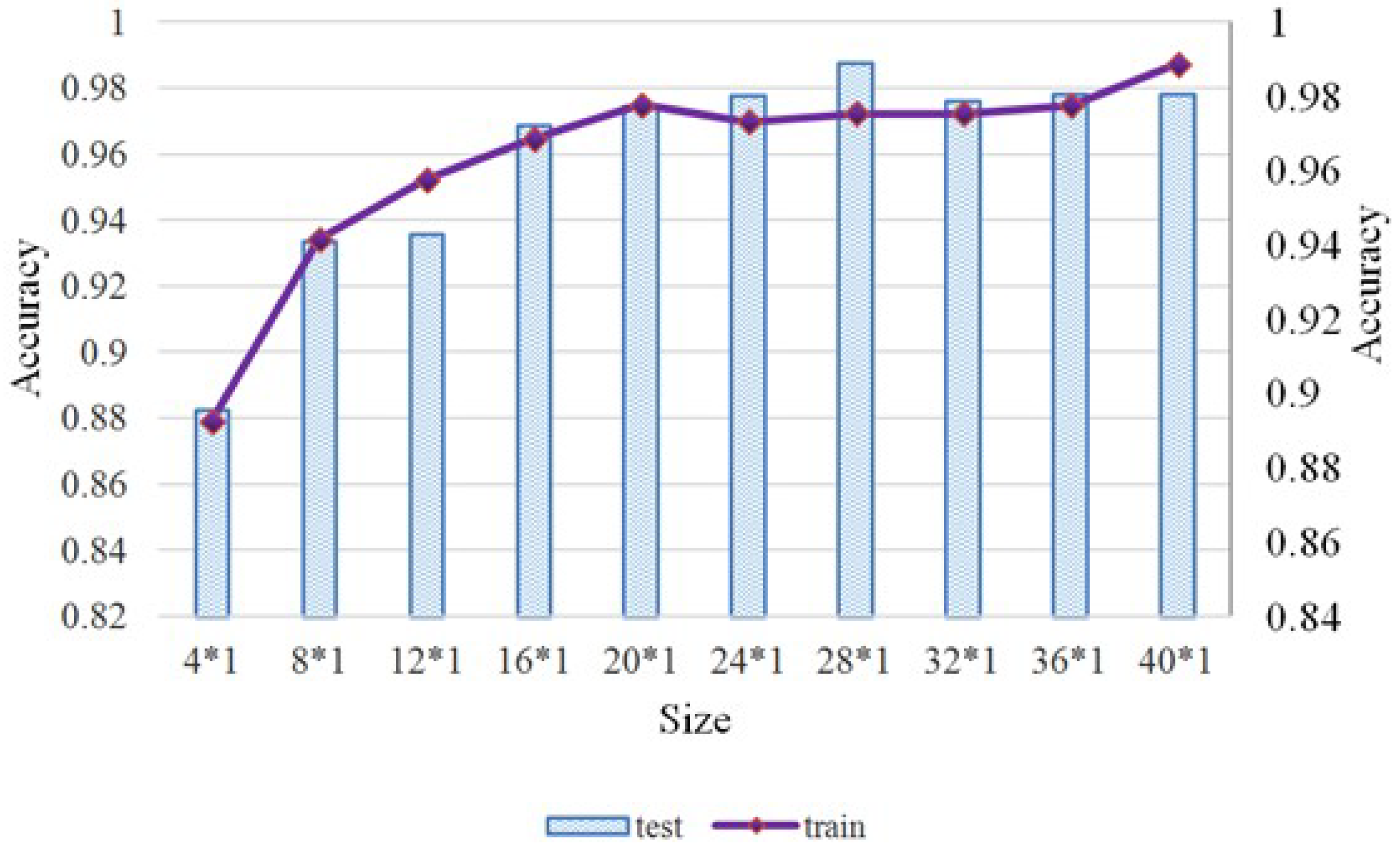
3.4. Experiment 4: Performance under Different Timing Input Widths
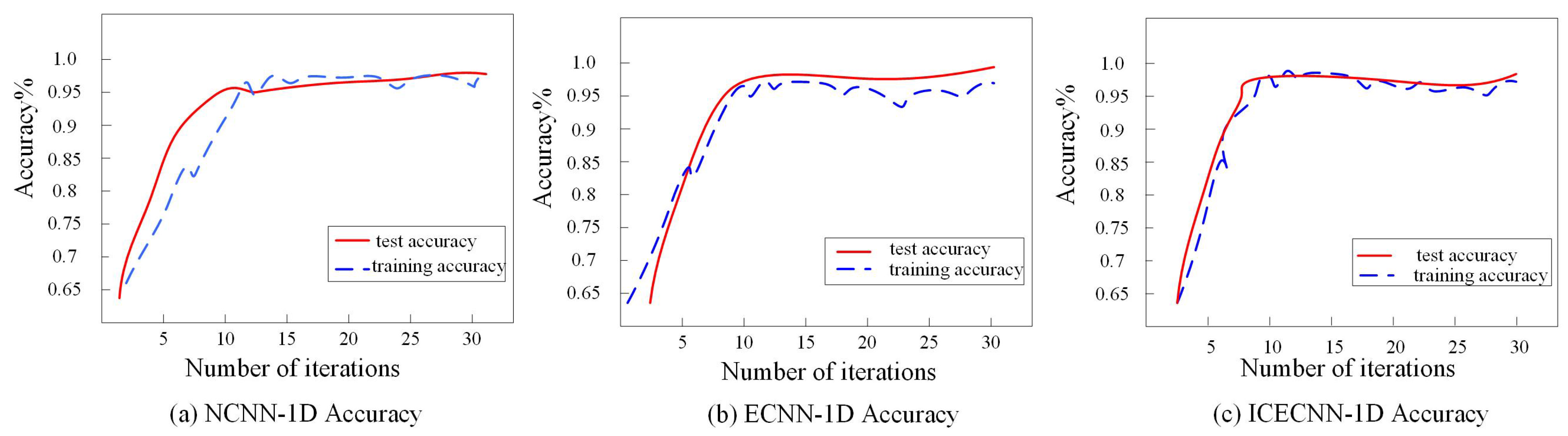
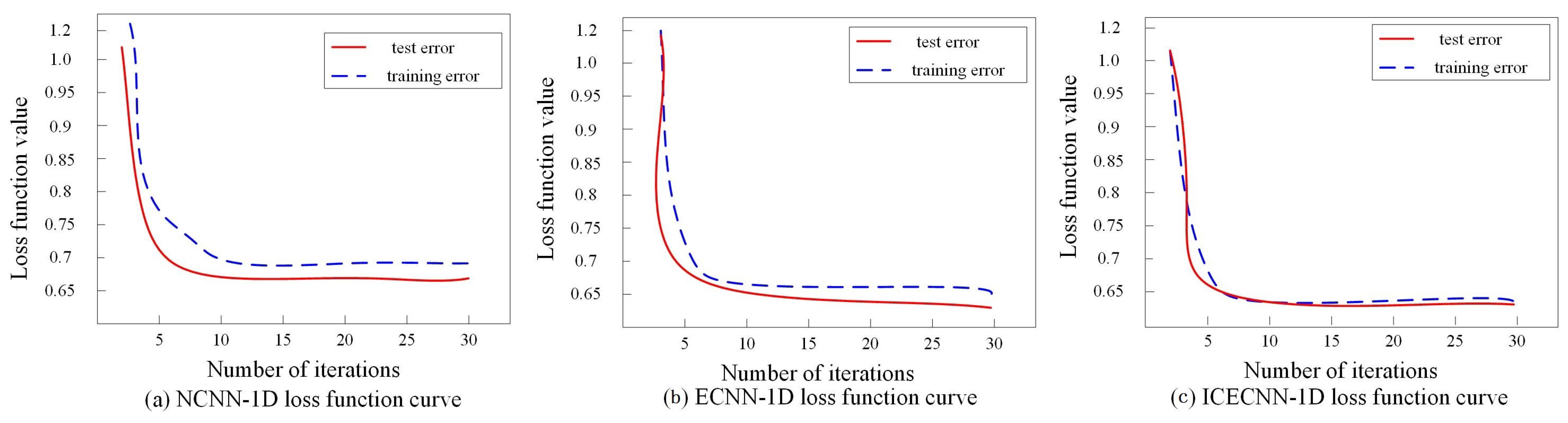
3.5. Experiment 5: Performance Comparison of Different Models
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fan, L.; Chai, Y.; Chen, X. Trend attention fully convolutional network for remaining useful life estimation. Reliab. Eng. Syst. Saf. 2022, 225, 108590. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, B.; Ding, S.X.; Huang, B. Data-driven fault diagnosis for traction systems in high-speed trains: A survey, challenges and perspectives. IEEE Trans. Intell. Transp. Syst. 2020, 23, 1700–1716. [Google Scholar] [CrossRef]
- Xu, S.; Tao, S.; Zheng, W.; Chai, Y.; Ma, M.; Ding, L. Multiple open-circuit fault diagnosis for back-to-back converter of PMSG wind generation system based on instantaneous amplitude estimation. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Xu, S.; Huang, W.; Wang, H.; Zheng, W.; Wang, J.; Chai, Y.; Ma, M. A Simultaneous Diagnosis Method for Power Switch and Current Sensor Faults in Grid-Connected Three-Level NPC Inverters. IEEE Trans. Power Electron. 2022, 38, 1104–1118. [Google Scholar] [CrossRef]
- Guo, Q. Research on the application of improved shuffled frog leaping algorithm in mechanical fault diagnosis. Acad. J. Manuf. Eng. 2018, 16, 137–142. [Google Scholar]
- Ziani, R.; Felkaoui, A.; Zegadi, R. Bearing fault diagnosis using multiclass support vector machines with binary particle swarm optimization and regularized Fisher’s criterion. J. Intell. Manuf. 2017, 28, 405–417. [Google Scholar] [CrossRef]
- Niu, Q. Discussion on fault diagnosis of and solution seeking for rolling bearing based on deep learning. Acad. J. Manuf. Eng. 2018, 16, 58–64. [Google Scholar]
- Shi, L.; Zhu, Y.; Zhang, Y.; Su, Z. Fault Diagnosis of Signal Equipment on the Lanzhou-Xinjiang High-Speed Railway Using Machine Learning for Natural Language Processing. Complexity 2021, 2021, 9126745. [Google Scholar] [CrossRef]
- Buczak, A.L.; Guven, E. A Survey of Data Mining and Machine Learning Methods for Cyber Security Intrusion Detection. IEEE Commun. Surv. Tutorials 2017, 18, 1153–1176. [Google Scholar] [CrossRef]
- Liu, B.; Chai, Y.; Huang, C.; Fang, X.; Tang, Q.; Wang, Y. Industrial process monitoring based on optimal active relative entropy components. Measurement 2022, 197, 111160. [Google Scholar] [CrossRef]
- Ren, H.; Qu, J.F.; Chai, Y.; Tang, Q.; Ye, X. Deep learning for fault diagnosis: The state of the art and challenge. Control. Decis. 2017, 32, 1345–1358. [Google Scholar]
- Abid, F.B.; Sallem, M.; Braham, A. Robust Interpretable Deep Learning for Intelligent Fault Diagnosis of Induction Motors. IEEE Trans. Instrum. Meas. 2019, 69, 3506–3515. [Google Scholar] [CrossRef]
- Chen, H.; Chen, Z.; Chai, Z.; Jiang, B.; Huang, B. A single-side Neural Network-aided canonical correlation analysis with applications to fault diagnosis. IEEE Trans. Cybern. 2021, 52, 9454–9466. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Wang, H.F.; Guo, J.; Xu, T.H. Bayesian Network Based Fault Diagnosis Method for On-board Equipment of Train Control System. J. China Railw. Soc. 2017, 39, 93–100. [Google Scholar]
- An, P. Fault diagnosis method of mechanical hydraulic system based on artificial intelligence. Acad. J. Manuf. Eng. 2017, 15, 55–59. [Google Scholar]
- Lu, Q.; Al-Wahaibi, S.S. Enhanced CNN with Global Features for Fault Diagnosis of Complex Chemical Processes. arXiv 2022, arXiv:2210.01727. [Google Scholar]
- Jiang, X.; Yang, S.; Wang, F.; Xu, S.; Wang, X.; Cheng, X. OrbitNet: A new CNN model for automatic fault diagnostics of turbomachines. Appl. Soft Comput. 2021, 110, 107702. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, H.; Wu, B.; Zhou, Q.; Hu, Y. A novel data-driven method based on sample reliability assessment and improved CNN for machinery fault diagnosis with non-ideal data. J. Intell. Manuf. 2022, 1–14. [Google Scholar] [CrossRef]
- Park, C.H.; Kim, H.; Lee, J.; Ahn, G.; Youn, M.; Youn, B.D. A Feature Inherited Hierarchical Convolutional Neural Network (FI-HCNN) for Motor Fault Severity Estimation Using Stator Current Signals. Korean Soc. Precis. Eng. 2021, 8, 1253–1266. [Google Scholar] [CrossRef]
- Deng, H.; Zhang, W.X.; Liang, Z.F. Application of BP Neural Network and Convolutional Neural Network (CNN) in Bearing Fault Diagnosis. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1043, 042026. [Google Scholar] [CrossRef]
- Li, H. Computer network connection enhancement optimization algorithm based on convolutional Neural Network. In Proceedings of the 2021 International Conference on Networking, Communications and Information Technology (NetCIT), Manchester, UK, 26–27 December 2021; pp. 281–284. [Google Scholar]
- Shoka, A.A.E.; Dessouky, M.M.; El-Sayed, A.; Hemdan, E.E.D. An Efficient CNN Based Epileptic Seizures Detection Framework Using Encrypted EEG Signals for Secure Telemedicine Applications. Alex. Eng. J. 2022, in press. [Google Scholar]
- Brynjolfsson, E.; Mitchell, T. What can machine learning do? Workforce implications. Science 2017, 358, 1530–1534. [Google Scholar] [CrossRef]
- Gastegger, M.; Behler, J.; Marquet, P. Machine Learning Molecular Dynamics for the Simulation of Infrared Spectra. Chem. Sci. 2017, 8, 6924–6935. [Google Scholar] [CrossRef]
- Lamperti, F.; Roventini, A.; Sani, A. Agent-Based Model Calibration using Machine Learning Surrogates. J. Econ. Dyn. Control. 2018, 90, 366–389. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Z.; Verma, N. In-Memory Computation of a Machine-Learning Classifier in a Standard 6T SRAM Array. IEEE J. Solid-State Circuits 2017, 52, 915–924. [Google Scholar] [CrossRef]
- Liu, Y.; Chai, Y.; Liu, B.; Wang, Y. Bearing Fault Diagnosis Based on Energy Spectrum Statistics and Modified Mayfly Optimization Algorithm. Sensors 2021, 21, 2245. [Google Scholar] [CrossRef] [PubMed]
- Goodfellow, I.; McDaniel, P.; Papernot, N. Making Machine Learning Robust Against Adversarial Inputs. Commun. ACM 2018, 61, 56–66. [Google Scholar] [CrossRef]
- Char, D.S.; Shah, N.H.; Magnus, D. Implementing Machine Learning in Health Care - Addressing Ethical Challenges. N. Engl. J. Med. 2018, 378, 981–983. [Google Scholar] [CrossRef]
- Assouline, D.; Mohajeri, N.; Scartezzini, J.L. Quantifying rooftop photovoltaic solar energy potential: A machine learning approach. Solar Energy 2017, 141, 278–296. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fault Location | No | Rolling Element | Inner Raceway | Outer Raceway | Load | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Label | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| Fault diameter (inch) | 0 | 0.007 | 0.014 | 0.021 | 0.007 | 0.014 | 0.021 | 0.007 | 0.014 | 0.021 | ||
| A | training | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 1 |
| Testing | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | ||
| B | training | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 2 |
| Testing | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | ||
| C | training | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 665 | 3 |
| Testing | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | 20 | ||
| D | training | 1985 | 1985 | 1985 | 1985 | 1985 | 1985 | 1985 | 1985 | 1985 | 1985 | 1,2,3 |
| Testing | 70 | 70 | 70 | 70 | 70 | 70 | 70 | 70 | 70 | 70 | ||
| Experimental Environment | Hardware Configuration |
|---|---|
| Operating system | Windows 11 |
| CPU | Intel(R) Xeon(R) Gold 5218R cpu @ 2.10 GHz |
| GPU | NVIDIA GeForce RTX 3080 |
| Tensorflow | 1.14 |
| python | 3.7 |
| Model | Average Accuracy (%) | Average Time (s) | ||
|---|---|---|---|---|
| Train | Test | Train | Test | |
| NCNN-1D | 0.9645 | 0.9532 | 223 | 0.79 |
| ECNN-1D | 0.9744 | 0.9776 | 164 | 0.71 |
| ICECNN-1D | 0.9782 | 0.9794 | 158 | 0.68 |
| Model ICECNN-1D | Recognition Accuracy (%) | ||||
|---|---|---|---|---|---|
| Period (T) | 1T | 2T | 3T | 4T | 5T |
| train | 0.9577 | 0.9626 | 0.9763 | 0.9726 | 0.9791 |
| test | 0.9452 | 0.9594 | 0.9676 | 0.9742 | 0.9762 |
| Period (T) | 6T | 7T | 8T | 9T | 10T |
| train | 0.9797 | 0.9796 | 0.9793 | 0.9782 | 0.9886 |
| test | 0.9749 | 0.9788 | 0.9723 | 0.9765 | 0.9781 |
| Model CECNN-1D | Recognition Accuracy (%) | ||||
|---|---|---|---|---|---|
| Period (T) | 1T | 2T | 3T | 4T | 5T |
| train | 0.9576 | 0.9623 | 0.9754 | 0.9746 | 0.9789 |
| test | 0.9498 | 0.9572 | 0.9668 | 0.9730 | 0.9759 |
| Period (T) | 6T | 7T | 8T | 9T | 10T |
| train | 0.9794 | 0.9794 | 0.9745 | 0.9714 | 0.9769 |
| test | 0.9721 | 0.9735 | 0.9715 | 0.9725 | 0.9779 |
| Model NCNN-ID | Recognition Accuracy (%) | ||||
|---|---|---|---|---|---|
| Period (T) | 1T | 2T | 3T | 4T | 5T |
| train | 0.9445 | 0.9540 | 0.9627 | 0.9644 | 0.9659 |
| test | 0.9459 | 0.9465 | 0.9530 | 0.9422 | 0.9551 |
| Period (T) | 6T | 7T | 8T | 9T | 10T |
| train | 0.9652 | 0.9677 | 0.9617 | 0.9647 | 0.9648 |
| test | 0.9540 | 0.9580 | 0.9589 | 0.9560 | 0.9539 |
| Average Recognition Rate | Average Training Time (s) | ||||
|---|---|---|---|---|---|
| A | B | C | D | ||
| BPNN | 78.86 | 74.33 | 75.79 | 78.15 | 132 |
| LetNet5-1D | 79.89 | 80.32 | 79.69 | 82.23 | 207 |
| AlexNet-2D | 86.64 | 89.59 | 88.66 | 87.26 | 225 |
| VI-CNN | 93.62 | 89.76 | 94.75 | 91.59 | 254 |
| CECNN-1D | 97.26 | 95.79 | 97.42 | 96.61 | 178 |
| ICECNN-1D | 97.55 | 97.86 | 97.89 | 97.84 | 167 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Jiang, Y.; Liu, B.; Ma, L.; Qu, J.; Chai, Y. Intelligent Fault Diagnosis Method for Industrial Processing Equipment by ICECNN-1D. Electronics 2022, 11, 4207. https://doi.org/10.3390/electronics11244207
Li Z, Jiang Y, Liu B, Ma L, Qu J, Chai Y. Intelligent Fault Diagnosis Method for Industrial Processing Equipment by ICECNN-1D. Electronics. 2022; 11(24):4207. https://doi.org/10.3390/electronics11244207
Chicago/Turabian StyleLi, Zhaofei, Yutao Jiang, Bowen Liu, Le Ma, Jianfeng Qu, and Yi Chai. 2022. "Intelligent Fault Diagnosis Method for Industrial Processing Equipment by ICECNN-1D" Electronics 11, no. 24: 4207. https://doi.org/10.3390/electronics11244207
APA StyleLi, Z., Jiang, Y., Liu, B., Ma, L., Qu, J., & Chai, Y. (2022). Intelligent Fault Diagnosis Method for Industrial Processing Equipment by ICECNN-1D. Electronics, 11(24), 4207. https://doi.org/10.3390/electronics11244207