2.1. System Description
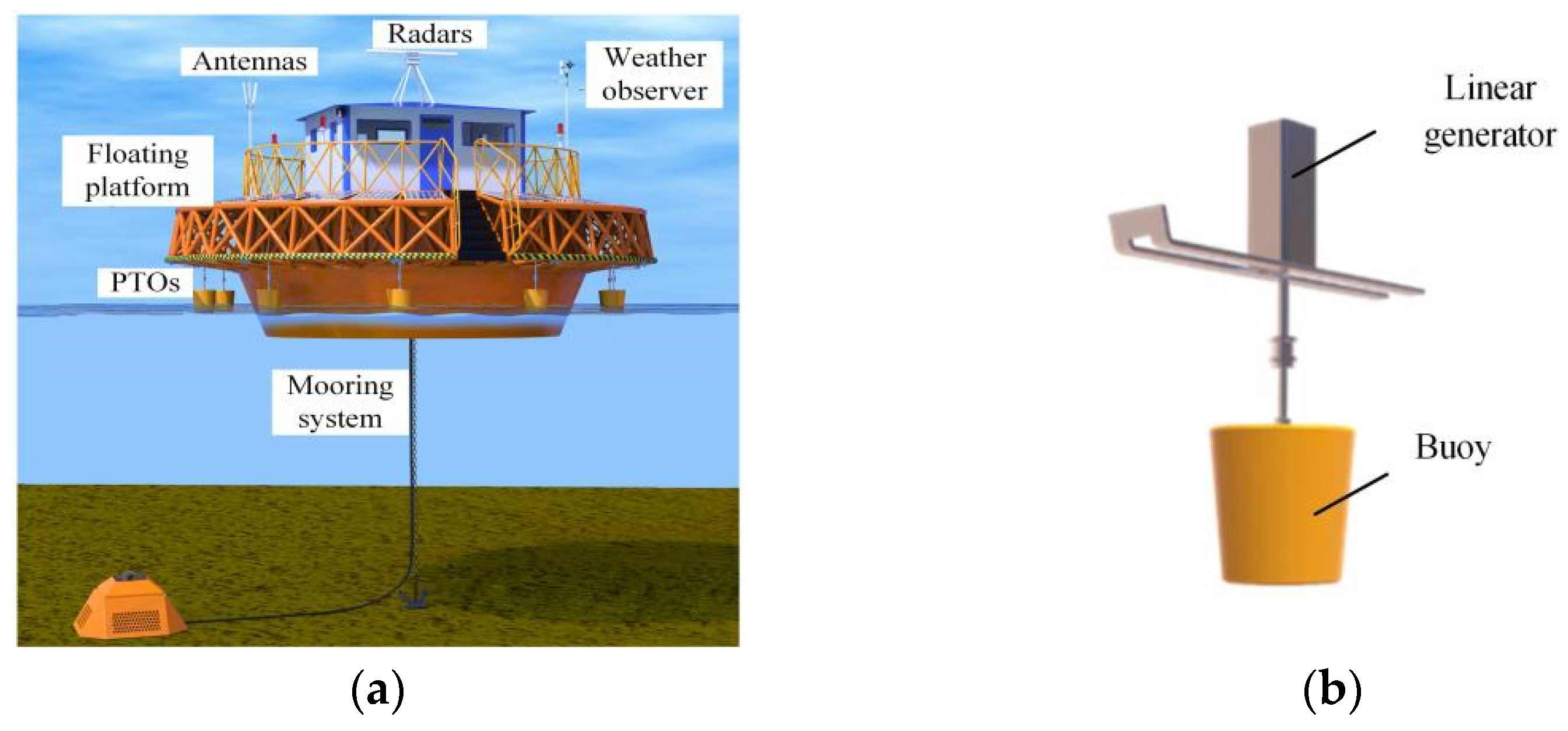
The ocean wave convert system proposed in this paper consists of a floating platform, several DD-WECs, and the mooring system, as shown in
Figure 1. Furthermore, devices with different functions can be installed on the platform, such as radars, weather observers, batteries, and so on [
26]. All the components together make up a microgrid, which can utilize wave energy to supply this equipment or store it in the batteries. The DD-WEC in this system is merely composed of a buoy and a linear generator (LG), in which the wave energy is captured by the buoy. The translator of the LG is directly coupled to the heaving buoy and the stator is mounted on the platform. When the incident waves excite the buoy and platform in the vertical direction simultaneously, the motion of the floating platform, which is fastened by the anchor, is much smaller than the buoy. Therefore, there is a relative speed between the buoy and the platform (i.e., the stator and the translator). Then, windings mounted in the stator of the LG will induce a voltage and generate electricity continuously.
Figure 1 shows that there are several small DD-WECs distributed around the platform and that all of them can convert the wave energy to electricity. This design improves the survivability and reliability of the wave energy conversion system under extreme ocean weather. Moreover, even if some of the DD-WECs are damaged by the enormous waves, the remaining machines can still support the operation of the equipment. Meanwhile, replacing the broken DD-WECs will be cheap and convenient because of their small volume and light weight. On the other hand, the small volume of the DD-WEC requires the LG to have a high power density and power output in the restricted space. Therefore, the PMs are widely applied in linear generators to increase power density. However, the PM machines usually suffer a large detent force, especially in the interior PM machines, which affects the stable operation of the small direct-drive power generation system. For this reason, the influence of the detent force in small WECs is analyzed in the following part.
2.2. Influence Analysis of Detent Force in WEC
Because the wave velocity in the experimental tank is simplified in sinusoidal and conforms to the characteristics of regular (linear) waves, the motion equation of the buoy can be described in the frequency domain. According to Newton’s second law, the equation of the motion of the buoy in the vertical direction is
where
is the imaginary number,
is the weight of the buoy,
is the moving speed of the buoy,
is the vertical excitation force of the wave,
is the hydrostatic force,
is the wave radiation force,
is the electromagnetic force of the generator,
is the friction force; the symbol “^” denotes a frequency domain expression, the acceleration of the buoy is
,
is the displacement of the buoy in the vertical direction, and
is the angular frequency. From motion equation, it can be seen that the speed of the buoy is related to different forces. Therefore, the following analysis is applied to the different forces.
Hydrostatics is the restoring force of the buoy due to the displacement under the still water. Its magnitude is related to the displacement and is calculated as:
where
is the static water cross-section (for the cylindrical buoy, i.e., the bottom area of the buoy),
is the density of water.
The composition of the electromagnetic force is different under no-load and load conditions. In the no-load state, the electromagnetic force is mainly composed of the detent force
. In the load state,
is the combined force of the detent force
and electromagnetic force
generated by the load. In order to analyze the influence of the detent force on the WEC more simply, it can be assumed that
. The exact electromagnetic force is calculated by Maxwell, one of the business finite element analysis (FEA) software. The friction force is generated by the friction between the bearings of MI-TLPMGs and the moving parts of the wave power generation system, which can be depicted as
where
is the coefficient of friction.
As the main interaction force between the buoy and the moving waves,
and
have a decisive impact on the hydrodynamic equation of the WEC. They are solved separately by using the potential flow theory. The fluid pressure on the bottom of the buoy is the main source of its wave force, therefore the wave excitation force can be described as
where
is the pressure,
is the unit normal vector and is in the same direction as the z-axis. According to the Bernoulli equation, the pressure is expressed as
where
is the wave velocity potential. Substituting Equation (5) into Equation (4) yields:
If the fixed buoy is released to the free movement state, the wave excitation force actuates it, and the wave nearby oscillates in the vertical direction. Conversely, the waves will react to the buoy. Therefore, it will produce a radiation force
where
is the added mass,
is the damping coefficient. Substituting Equations (2), (3), (6) and (7) into (1), the velocity and displacement of the buoy and linear generator are described as
From the above equations, it can be seen that the speed and buoy are affected by the detent force, which determines the shape and amplitude of the induced back electromotive force. To validate the analysis results, an experiment has been conducted in the wave tank as shown in
Figure 2. Based on a wave maker at the end of the tank, ocean waves with different heights and periods are produced to simulate the ocean waves. In the experiments, the ocean waves were assumed to be sinusoidal waves created by the flume with a period of 2 s and a wave height of 0.3 m. Due to the limited width of the flume, the radius, height, and thickness of the float is chosen to be 0.3 m, 0.5 m, and 0.002 m, respectively, in order to reduce the influence of the flume walls on the movement of the floats. The floats were also made of stainless steel to prevent corrosion and rusting.
Figure 3 shows that the wave reaches the maximum vertical velocity of 0.48 m/s at 0.5 s, and the buoy also reaches the maximum velocity of 0.28 m/s at the nearby time. Since the buoy is rigidly connected to the linear generator, they have the same moving speed. Nevertheless, the speed curve is not smooth and fluctuates with time, which is mainly caused by the detent force of the linear generator.
Figure 4 shows the three-phase induced back EMF waveforms of the linear generator driven by the buoy. The back EMF waveforms have a large fluctuation, which will affect the output power and wave energy conversion efficiency. Therefore, it is necessary to optimize and minimize the detent force in the small wave energy conversion device.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}