
Research on Co-Estimation Algorithm of SOC and SOH for Lithium-Ion Batteries in Electric Vehicles

 ,
,
Abstract
:1. Introduction
2. Experiment
2.1. Test Bench and Battery
2.2. Static Capacity Test
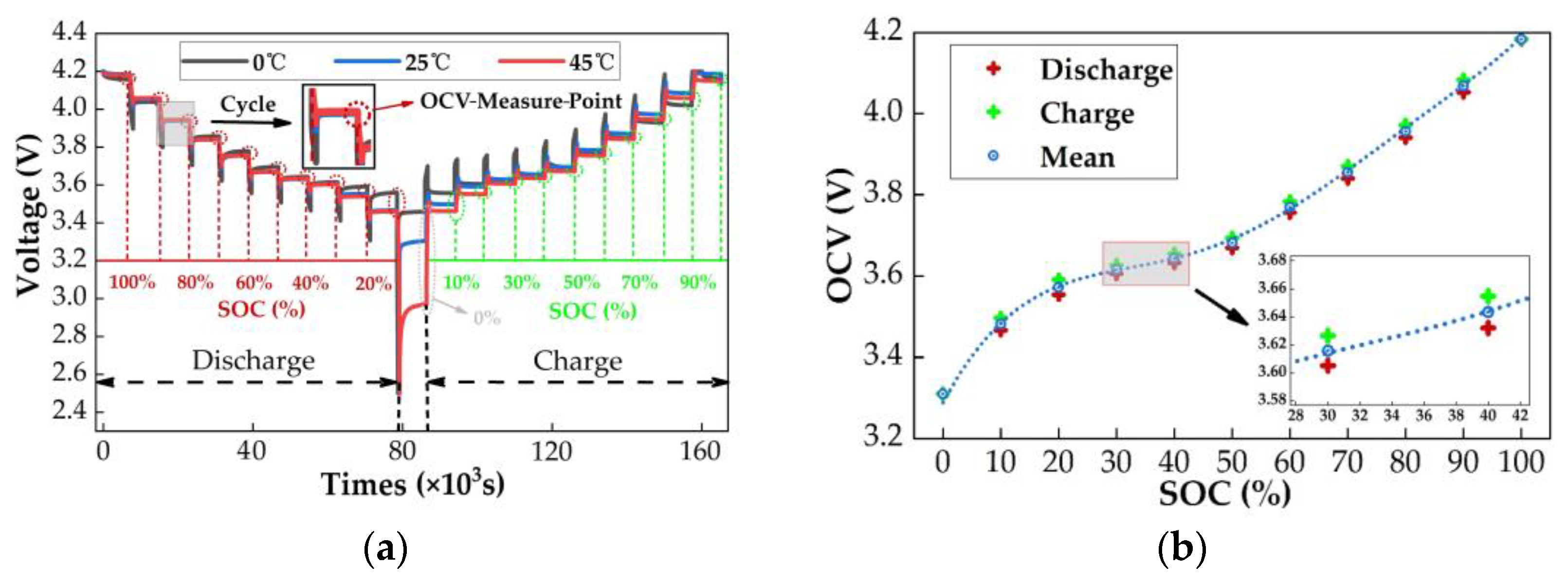
2.3. SOC–OCV Test
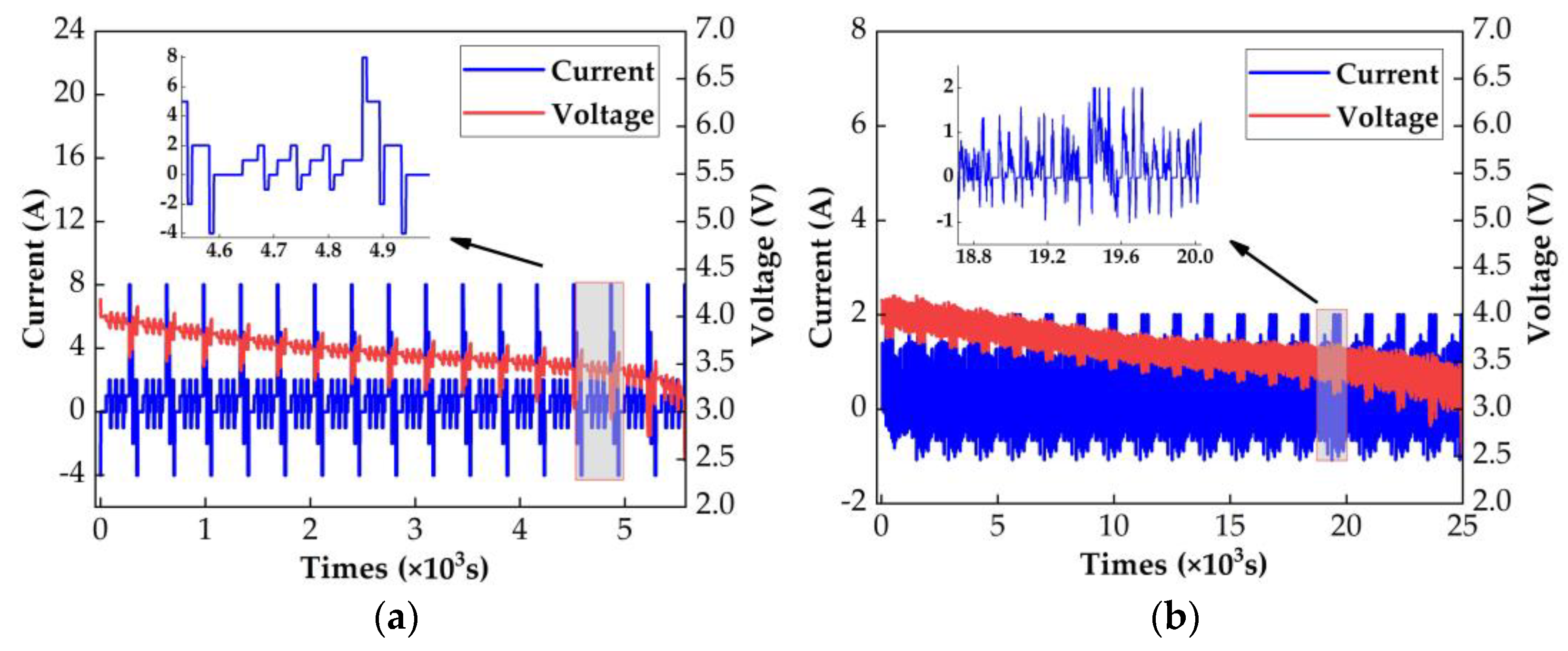
2.4. DST and FUDS Tests
3. Battery Model
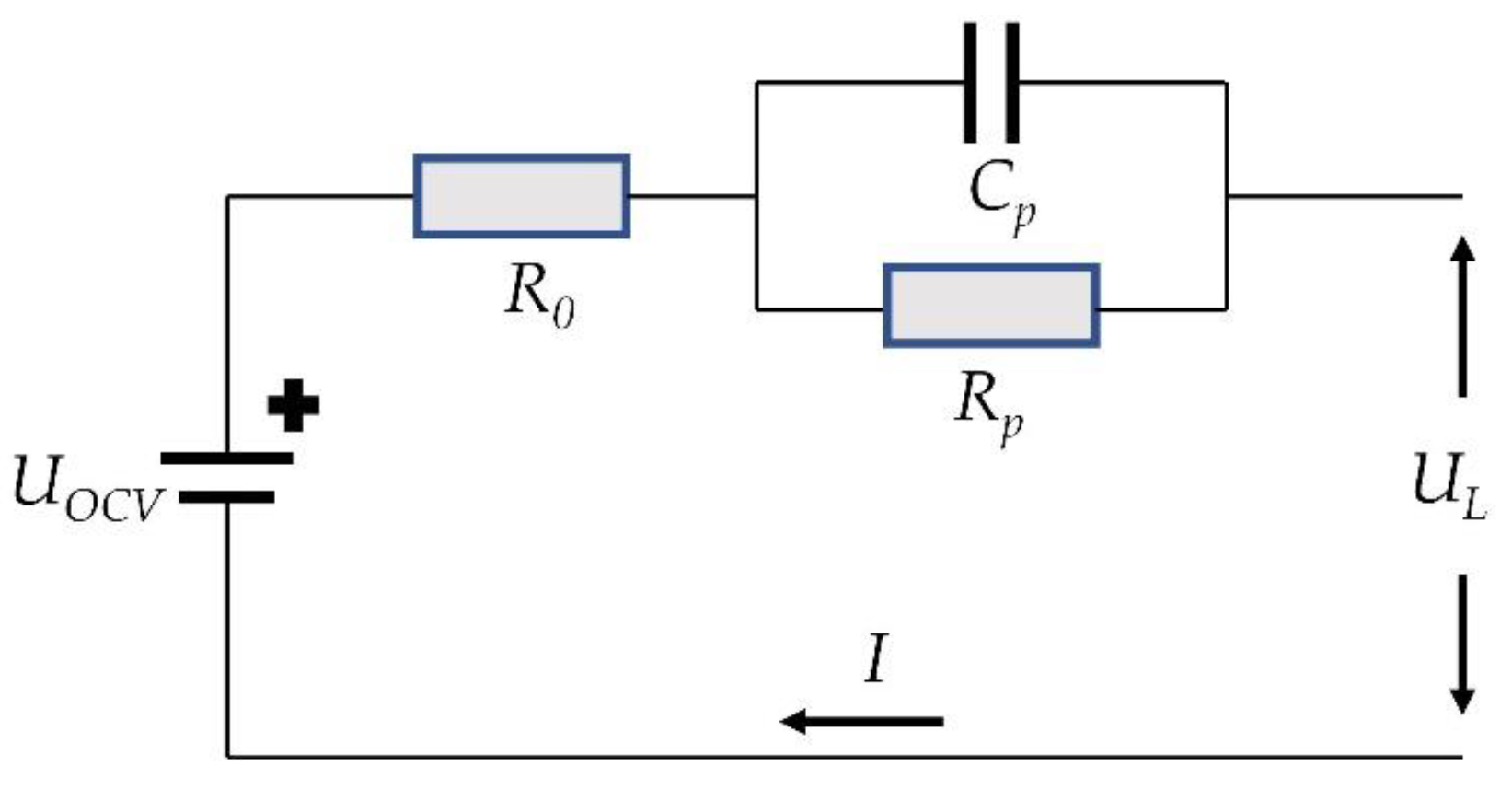
3.1. Equivalent Circuit Model
3.2. Model Parameters
3.2.1. SOC–OCV Curve
3.2.2. RLS Algorithm with Forgetting Factor
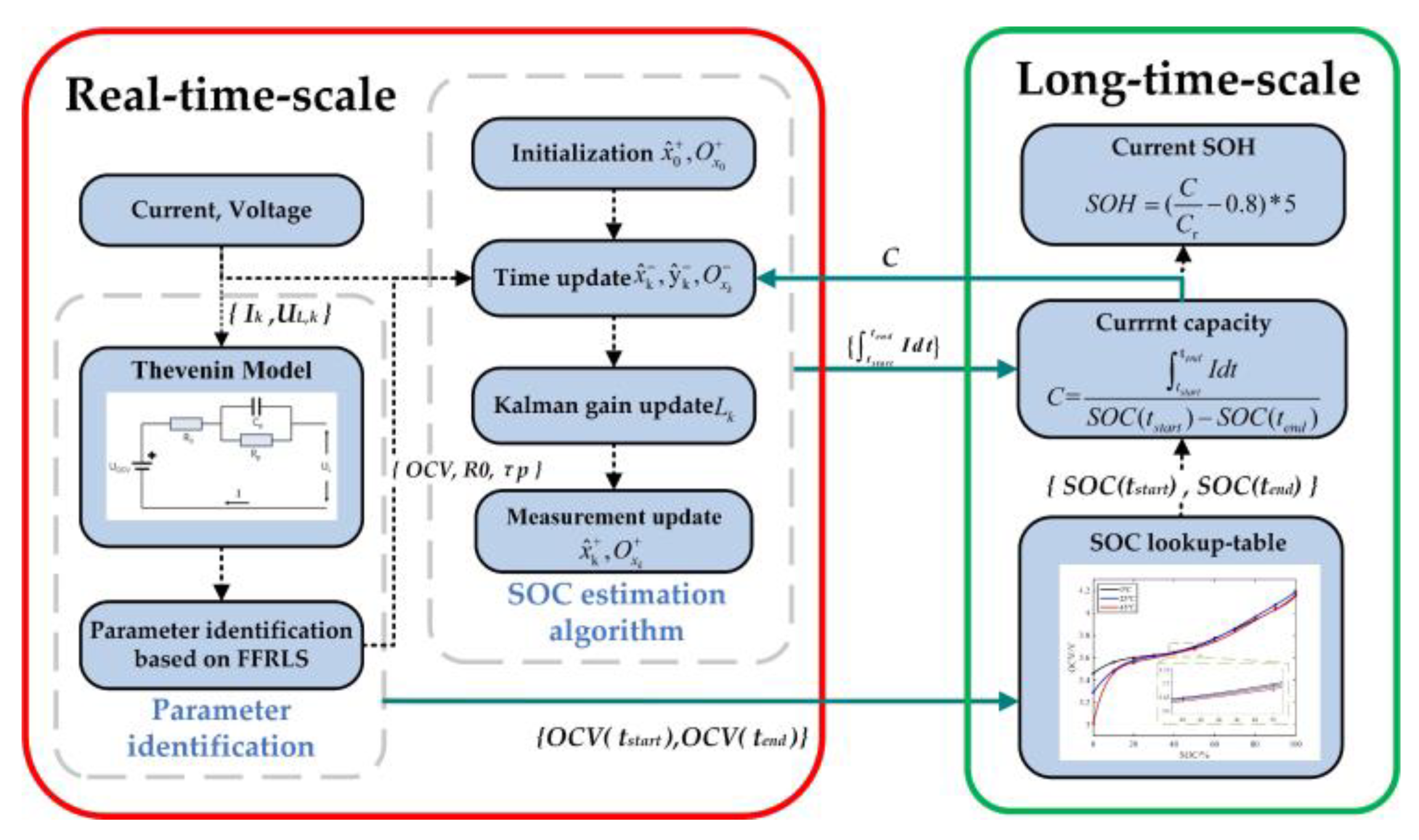
4. Collaborative Estimation Algorithm
4.1. SOC Estimation Algorithm Based on EKF
| Algorithm 1 The flow of extended Kalman filter (EKF) algorithm | |
| Step 1: Initialization, | |
| Step 2: Iteration, | |
| State update: | |
| Kalman gain: | |
| Measurement update: | |
4.2. SOH Estimation Algorithm
5. Results and Discussion
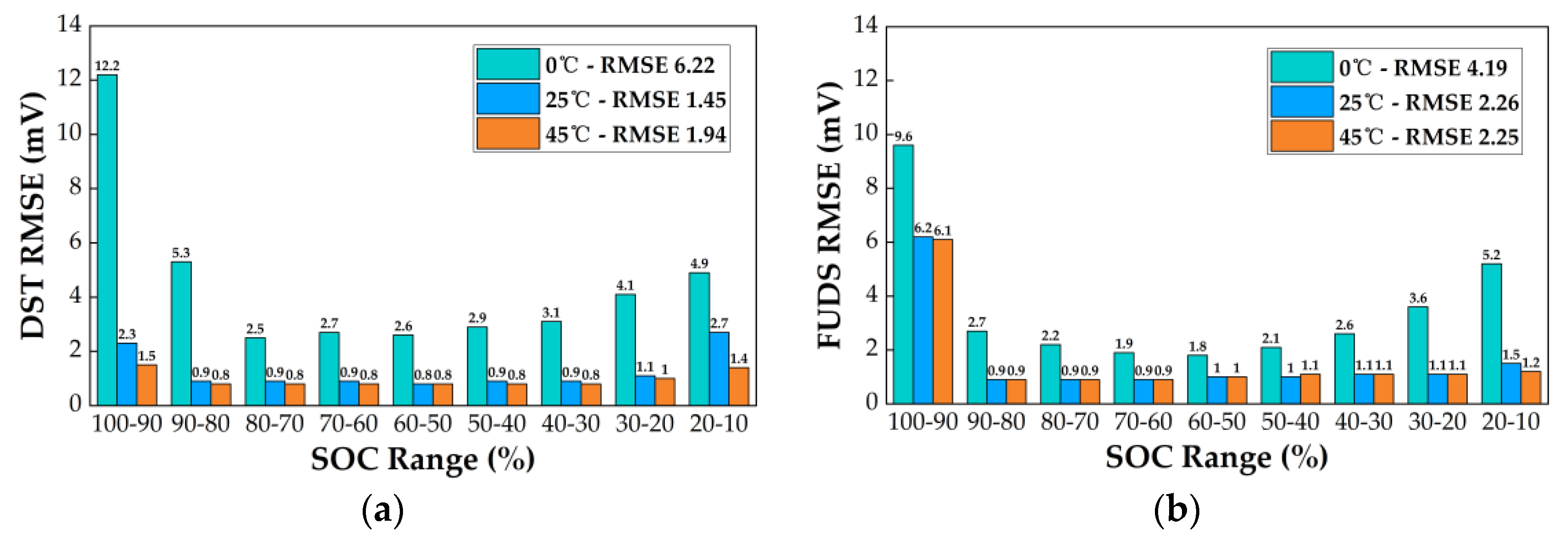
5.1. Analysis of the Model Accuracy
5.2. Analysis of Collaborative Estimation Algorithm
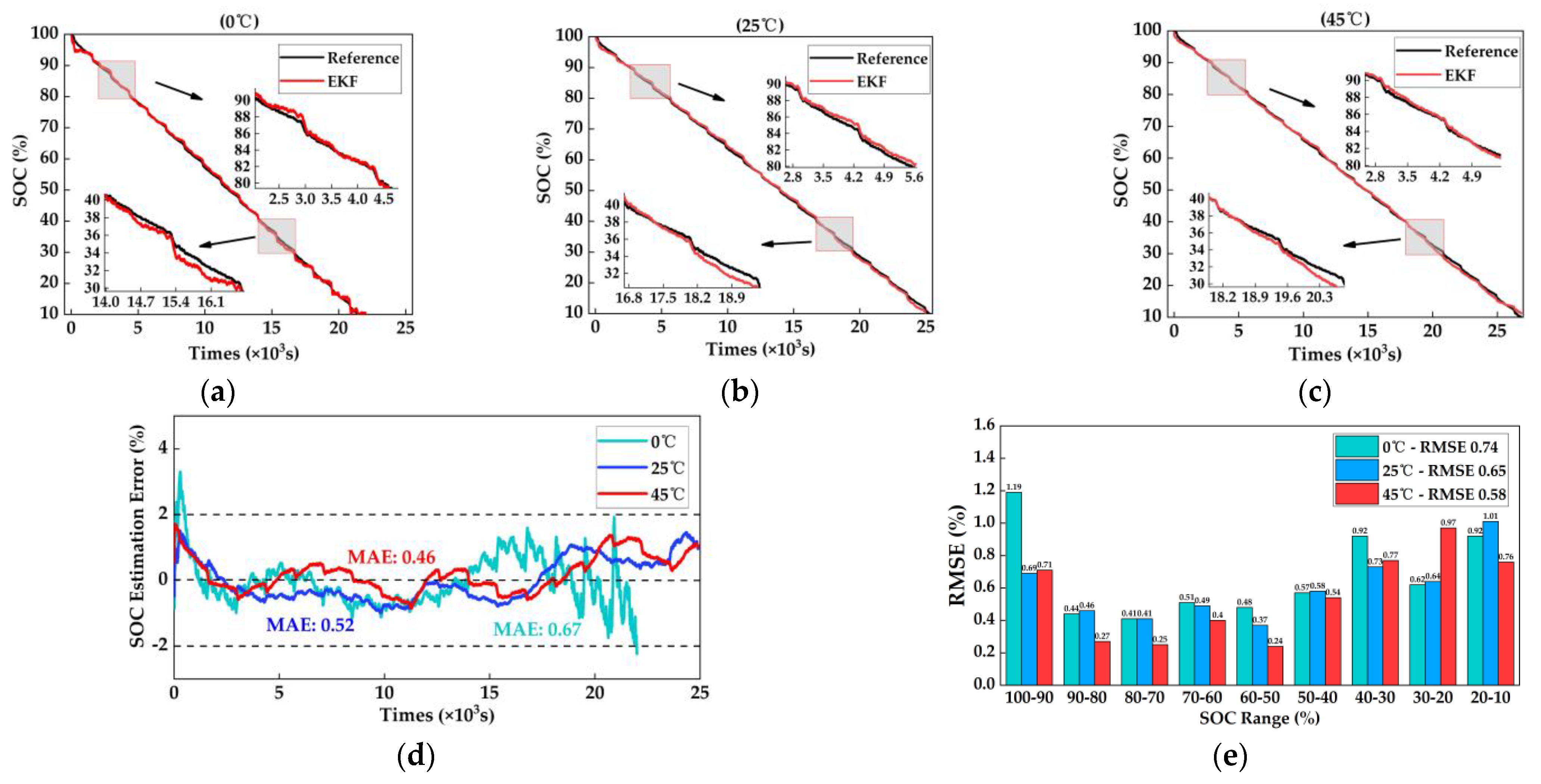
5.2.1. Analysis of the SOC Estimation Result
5.2.2. Analysis of the SOH Estimation Result
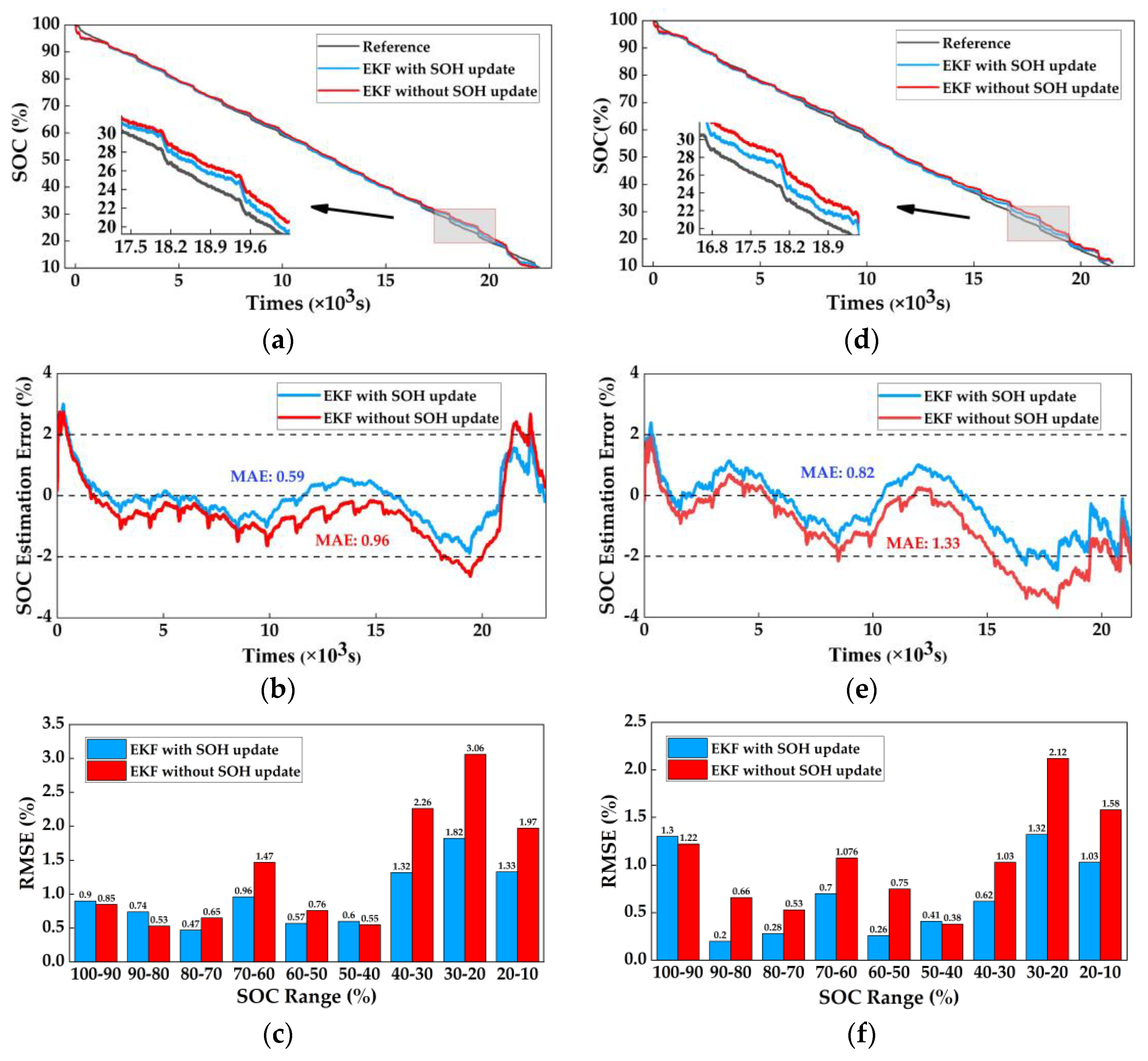
5.2.3. Analysis of the SOC and SOH Collaborative Estimation Algorithm
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, L.; Ding, H.T.; Shi, J.P.; Huang, Y.J.; Chen, H.; Guo, K.H.; Li, Q. An Adaptive Backstepping Sliding Mode Controller to Improve Vehicle Maneuverability and Stability via Torque Vectoring Control. IEEE Trans. Veh. Technol. 2020, 69, 2598–2612. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, F.C.; Chen, Z.; He, H.W. A data-driven multi-scale extended Kalman filtering based parameter and state estimation approach of lithium-ion polymer battery in electric vehicles. Appl. Energy 2014, 113, 463–476. [Google Scholar] [CrossRef]
- He, Z.G.; Chen, D.; Pan, C.F.; Chen, L.; Wang, S.H. State of charge estimation of power Li-ion batteries using a hybrid estimation algorithm based on UKF. Electrochim. Acta 2016, 211, 101–109. [Google Scholar]
- Lipu, M.S.H.; Hannan, M.A.; Hussain, A.; Ayob, A.; Saad, M.H.M.; Karim, T.F.; How, D.N.T. Data-driven state of charge estimation of lithium-ion batteries: Algorithms, implementation factors, limitations and future trends. J. Clean. Prod. 2020, 277, 124110. [Google Scholar] [CrossRef]
- Song, C.; Kim, K.; Sung, D.; Kim, K.; Yang, H.; Lee, H.; Cho, G.Y.; Cha, S.W. A Review of Optimal Energy Management Strategies Using Machine Learning Techniques for Hybrid Electric Vehicles. Int. J. Automot. Technol. 2021, 22, 1437–1452. [Google Scholar] [CrossRef]
- Hu, X.S.; Feng, F.; Liu, K.L.; Zhang, L.; Xie, J.L.; Liu, B. State estimation for advanced battery management: Key challenges and future trends. Renew. Sustain. Energy Rev. 2019, 114, 109334. [Google Scholar] [CrossRef]
- Feng, F.; Lu, R.G.; Zhu, C.B. A Combined State of Charge Estimation Method for Lithium-Ion Batteries Used in a Wide Ambient Temperature Range. Energies 2014, 7, 3004–3032. [Google Scholar] [CrossRef] [Green Version]
- He, W.; Williard, N.; Chen, C.C.; Pecht, M. State of charge estimation for Li-ion batteries using neural network modeling and unscented Kalman filter-based error cancellation. Int. J. Electr. Power Energy Syst. 2014, 62, 783–791. [Google Scholar] [CrossRef]
- Sun, F.C.; Xiong, R.; He, H.W. A systematic state-of-charge estimation framework for multi-cell battery pack in electric vehicles using bias correction technique. Appl. Energy 2016, 162, 1399–1409. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs—Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs—Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs—Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Liu, C.Z.; Liu, W.Q.; Wang, L.Y.; Hu, G.D.; Ma, L.P.; Ren, B.Y. A new method of modeling and state of charge estimation of the battery. J. Power Sources 2016, 320, 1–12. [Google Scholar] [CrossRef]
- Duan, J.D.; Wang, P.; Ma, W.T.; Qiu, X.Y.; Tian, X.; Fang, S. State of Charge Estimation of Lithium Battery Based on Improved Correntropy Extended Kalman Filter. Energies 2020, 13, 4197. [Google Scholar] [CrossRef]
- Wang, S.L.; Fernandez, C.; Shang, L.P.; Li, Z.F.; Li, J.C. Online state of charge estimation for the aerial lithium-ion battery packs based on the improved extended Kalman filter method. J. Energy Storage 2017, 9, 69–83. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Hannan, M.A.; Hussain, A.; Hoque, M.M.; Ker, P.J.; Saad, M.H.M.; Ayob, A. A review of state of health and remaining useful life estimation methods for lithium-ion battery in electric vehicles: Challenges and recommendations. J. Clean. Prod. 2018, 205, 115–133. [Google Scholar] [CrossRef]
- Tian, H.X.; Qin, P.L.; Li, K.; Zhao, Z. A review of the state of health for lithium -ion batteries: Research status and suggestions. J. Clean. Prod. 2020, 261, 120813. [Google Scholar] [CrossRef]
- Wang, J.; Liu, P.; Hicks-Garner, J.; Sherman, E.; Soukiazian, S.; Verbrugge, M.; Tataria, H.; Musser, J.; Finamore, P. Cycle-life model for graphite-LiFePO4 cells. J. Power Sources 2011, 196, 3942–3948. [Google Scholar] [CrossRef]
- Christensen, J.; Newman, J. A mathematical model of stress generation and fracture in lithium manganese oxide. J. Electrochem. Soc. 2006, 153, A1019–A1030. [Google Scholar] [CrossRef]
- Li, X.Y.; Wang, Z.P.; Zhang, L.; Zou, C.F.; Dorrell, D.D. State-of-health estimation for Li-ion batteries by combing the incremental capacity analysis method with grey relational analysis. J. Power Sources 2019, 410, 106–114. [Google Scholar] [CrossRef]
- Liu, T.Y.; Sun, Q.; Feng, J.; Pan, Z.Q.; Huangpeng, Q.Z. Residual life estimation under time-varying conditions based on a Wiener process. J. Stat. Comput. Simul. 2017, 87, 211–226. [Google Scholar] [CrossRef]
- Safari, M.; Delacourt, C. Mathematical Modeling of Lithium Iron Phosphate Electrode: Galvanostatic Charge/Discharge and Path Dependence. J. Electrochem. Soc. 2011, 158, A63–A73. [Google Scholar] [CrossRef]
- Yang, D.; Zhang, X.; Pan, R.; Wang, Y.J.; Chen, Z.H. A novel Gaussian process regression model for state-of-health estimation of lithium-ion battery using charging curve. J. Power Sources 2018, 384, 387–395. [Google Scholar] [CrossRef]
- Chaoui, H.; Miah, S.; Oukaour, A.; Gualous, H. State-of-Charge and State-of-Health Prediction of Lead-Acid Batteries with Genetic Algorithms. In Proceedings of the 2015 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 14–17 June 2015. [Google Scholar]
- Zou, Y.; Hu, X.S.; Ma, H.M.; Li, S.E. Combined state of charge and state of health estimation over lithium-ion battery cell cycle lifespan for electric vehicles. J. Power Sources 2015, 273, 793–803. [Google Scholar] [CrossRef]
- Ren, Z.; Du, C.Q.; Wu, Z.Y.; Shao, J.B.; Deng, W.J. A comparative study of the influence of different open circuit voltage tests on model-based state of charge estimation for lithium-ion batteries. Int. J. Energy Res. 2021, 45, 13692–13711. [Google Scholar] [CrossRef]
- Suarez-Garcia, A.; Alfonsin, V.; Urrejola, S.; Sanchez, A. Optimal parametrization of electrodynamical battery model using model selection criteria. J. Power Sources 2015, 285, 119–130. [Google Scholar] [CrossRef]
- Liu, W.; Xia, X.; Xiong, L.; Lu, Y.S.; Gao, L.T.; Yu, Z.P. Automated Vehicle Sideslip Angle Estimation Considering Signal Measurement Characteristic. IEEE Sens. J. 2021, 21, 21675–21687. [Google Scholar] [CrossRef]
- Shen, P.; Ouyang, M.G.; Lu, L.G.; Li, J.Q.; Feng, X.N. The Co-estimation of State of Charge, State of Health, and State of Function for Lithium-Ion Batteries in Electric Vehicles. IEEE Trans. Veh. Technol. 2018, 67, 92–103. [Google Scholar] [CrossRef]
- Yu, Q.Q.; Xiong, R.; Wang, L.Y.; Lin, C. A Comparative Study on Open Circuit Voltage Models for Lithium-ion Batteries. Chin. J. Mech. Eng. 2018, 31, 65. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Type | Nominal Capacity (mAH) | Nominal Voltage (V) | Discharge Cut-Off Voltage (V) | Charge Cut-Off Voltage (V) |
|---|---|---|---|---|---|
| EVE ICR 18650 | NCM | 2000 | 3.6 | 2.5 | 4.2 |
| Battery | Start Time (s) | End Time (s) | Change of SOC (%) | Used Capacity (mAH) | Estimated Capacity (mAH) | Estimated SOH (%) | Estimation Error (%) |
|---|---|---|---|---|---|---|---|
| B01 | 3000 | 4000 | 3.58 | 63.46 | 1772 | 88.6 | −0.4 |
| 5000 | 6000 | 3.98 | 72.32 | 1817 | 90.8 | 1.8 | |
| 7000 | 8000 | 4.22 | 78.34 | 1856 | 92.8 | 3.8 | |
| 9000 | 10000 | 4.04 | 74.64 | 1847 | 92.3 | 3.3 | |
| Mean Value | -------- | -------- | 1823 | 91.1 | 2.1 | ||
| B02 | 3000 | 4000 | 3.82 | 63.46 | 1661 | 83 | −1.5 |
| 5000 | 6000 | 4.34 | 72.32 | 1666 | 83.3 | −1.2 | |
| 7000 | 8000 | 4.42 | 78.34 | 1772 | 88.6 | 4.1 | |
| 9000 | 10000 | 4.2 | 74.64 | 1777 | 88.8 | 4.3 | |
| Mean Value | -------- | -------- | 1719 | 85.9 | 1.4 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, C.-Q.; Shao, J.-B.; Wu, D.-M.; Ren, Z.; Wu, Z.-Y.; Ren, W.-Q. Research on Co-Estimation Algorithm of SOC and SOH for Lithium-Ion Batteries in Electric Vehicles. Electronics 2022, 11, 181. https://doi.org/10.3390/electronics11020181
Du C-Q, Shao J-B, Wu D-M, Ren Z, Wu Z-Y, Ren W-Q. Research on Co-Estimation Algorithm of SOC and SOH for Lithium-Ion Batteries in Electric Vehicles. Electronics. 2022; 11(2):181. https://doi.org/10.3390/electronics11020181
Chicago/Turabian StyleDu, Chang-Qing, Jian-Bo Shao, Dong-Mei Wu, Zhong Ren, Zhong-Yi Wu, and Wei-Qun Ren. 2022. "Research on Co-Estimation Algorithm of SOC and SOH for Lithium-Ion Batteries in Electric Vehicles" Electronics 11, no. 2: 181. https://doi.org/10.3390/electronics11020181
APA StyleDu, C.-Q., Shao, J.-B., Wu, D.-M., Ren, Z., Wu, Z.-Y., & Ren, W.-Q. (2022). Research on Co-Estimation Algorithm of SOC and SOH for Lithium-Ion Batteries in Electric Vehicles. Electronics, 11(2), 181. https://doi.org/10.3390/electronics11020181