
Demonstration of Converter Control Interactions in MMC-HVDC Systems

 ,
, 
 ,
, 
 and
and
Abstract
:1. Introduction
- The multiple cross-over caused by two control configurations in a point-to-point HVDC link are theoretically analysed. The resulting unintended DC voltage drops and power imbalances are also investigated.
- Guidelines on how to appropriately select droop coefficients to avoid the occurrence of multiple cross-over of control characteristics are presented.
- The impact of multiple crossing of control characteristics is demonstrated using a 60-kW physical MMC test-rig. This is also verified through simulations using an open access toolbox developed in MATLAB/Simulink for the BEST PATHS project [24].
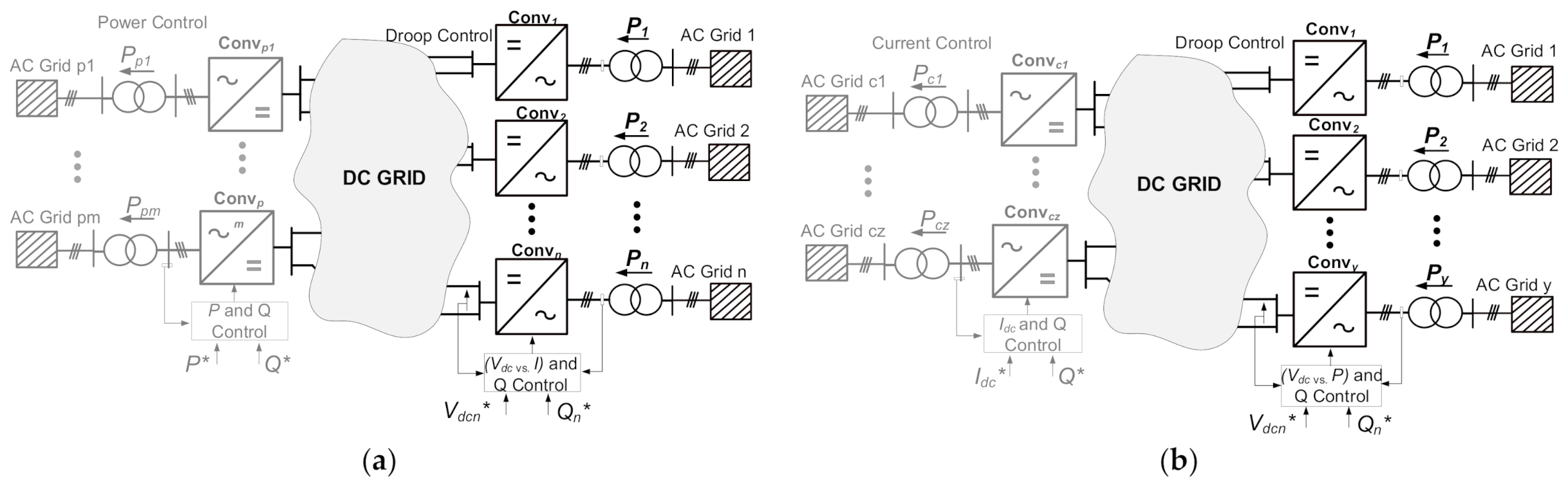
2. Droop Control Schemes in HVDC Networks
2.1. Overview of HVDC Control Schemes
2.2. Research Gap
3. Control Characteristics
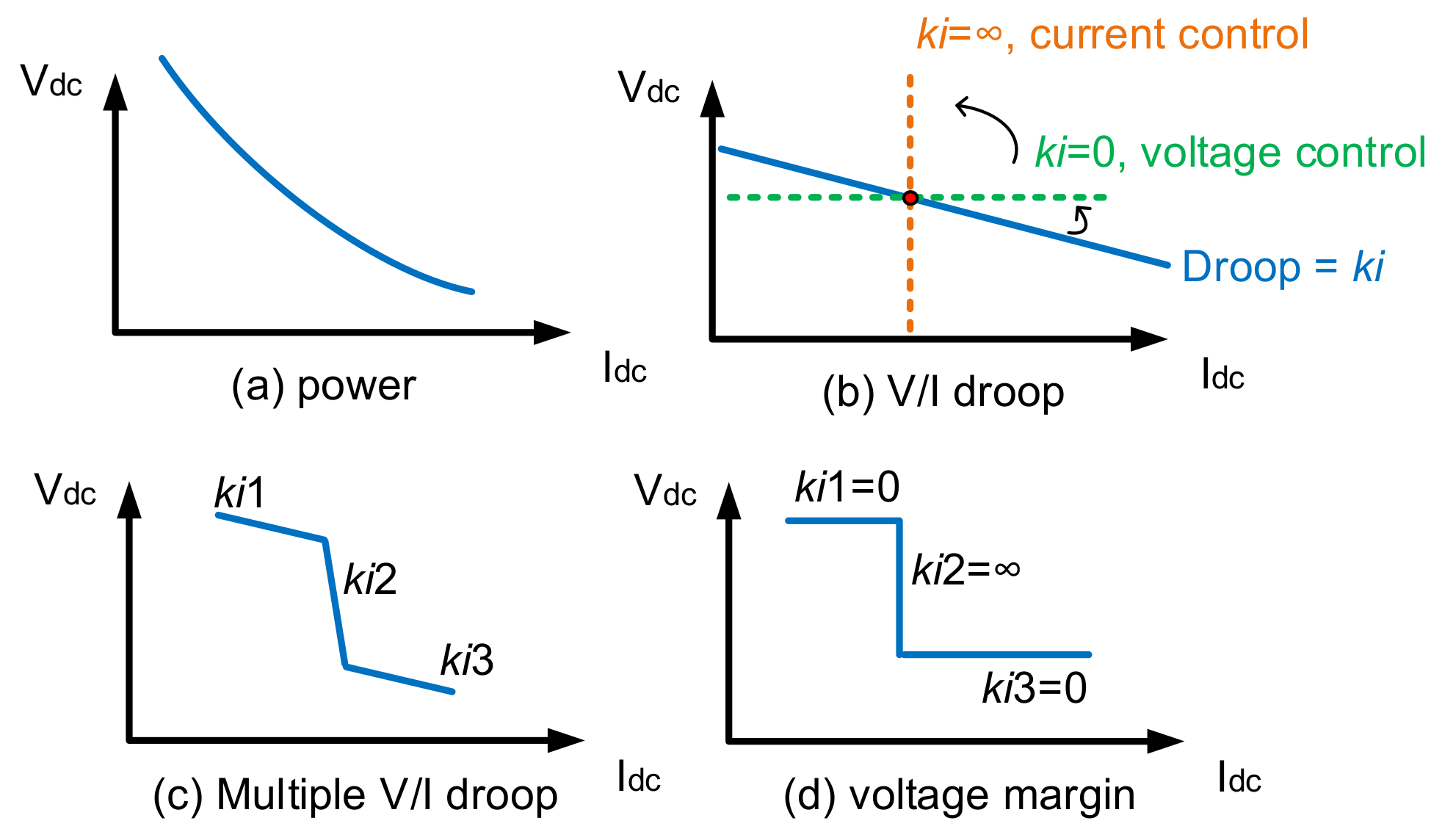
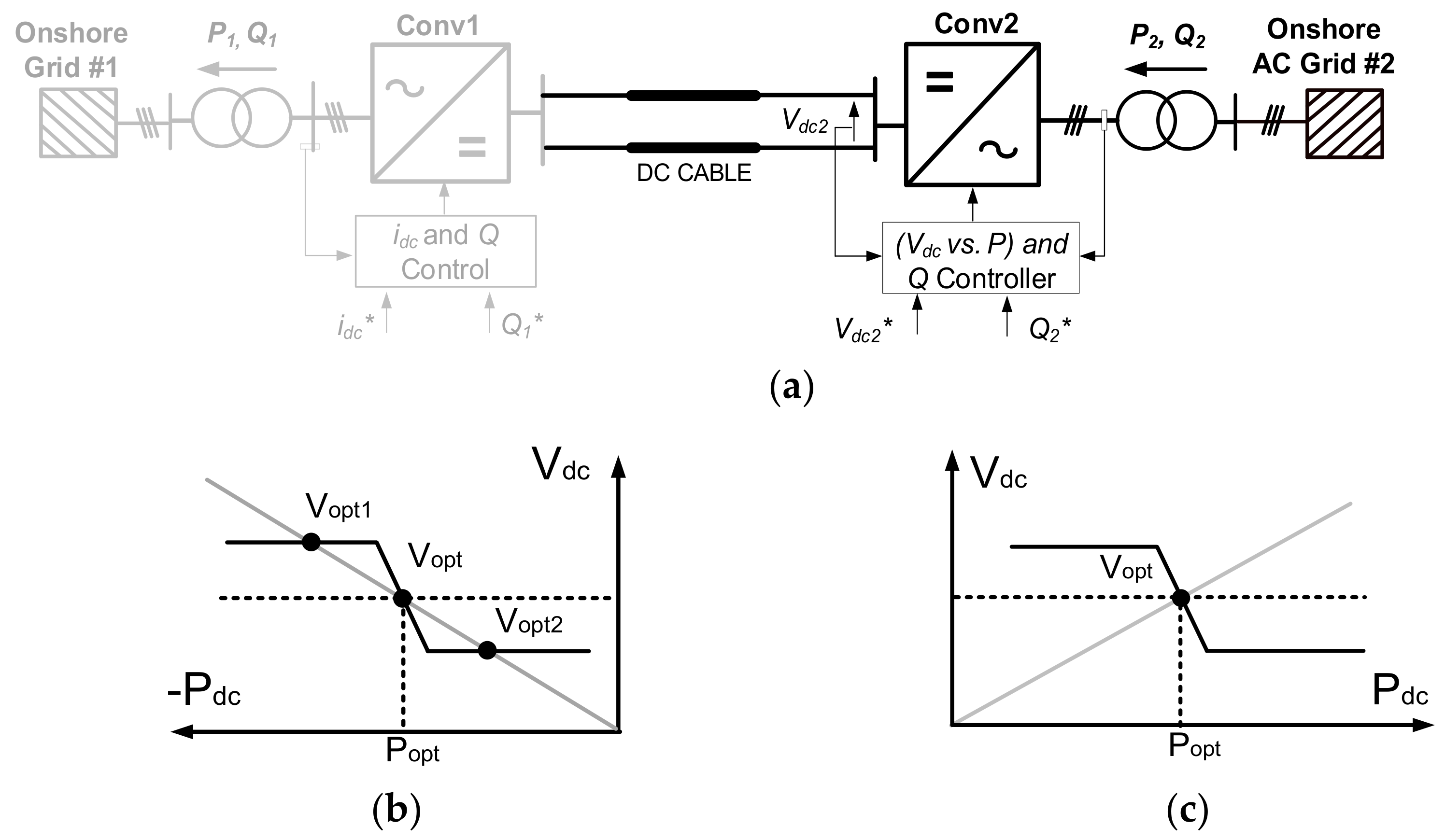
3.1. Voltage against Current (V-I) Frame
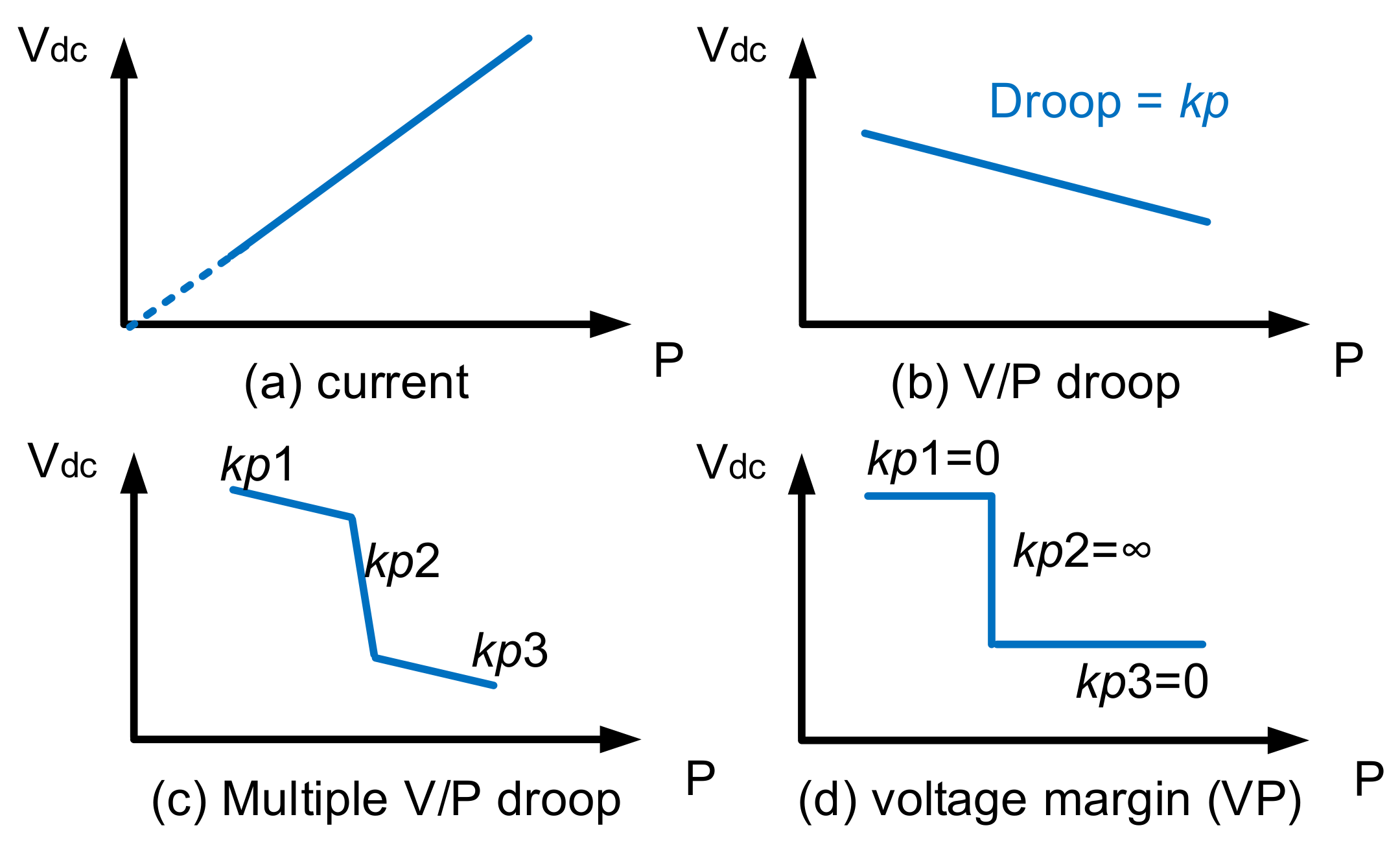
3.2. Voltage against Power (V-P) Frame
3.3. Multiple Cross-Over of Control Characteristics
4. Mathematical Analysis
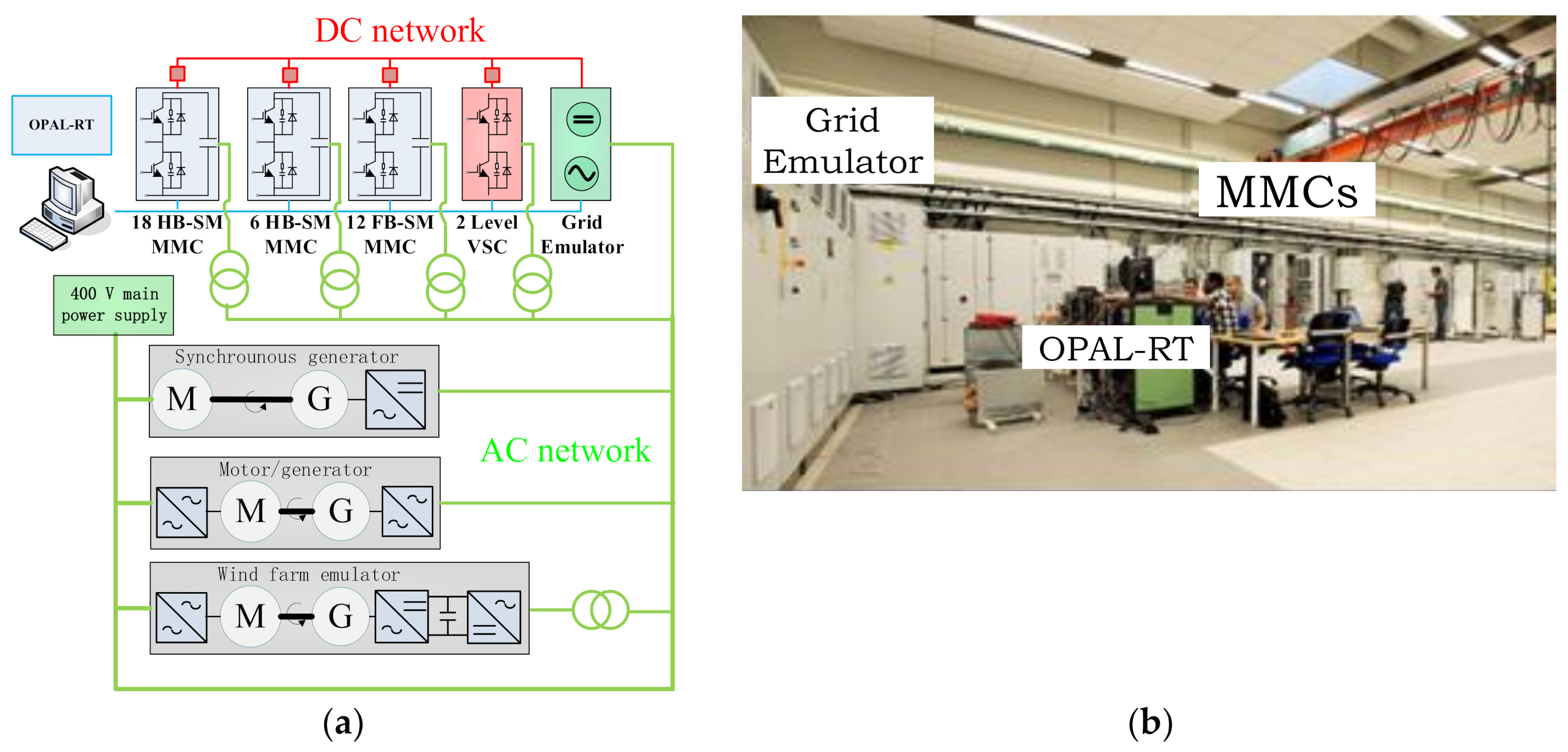
5. MMC-Based Test System
5.1. Configuration of the MMC Demonstrator
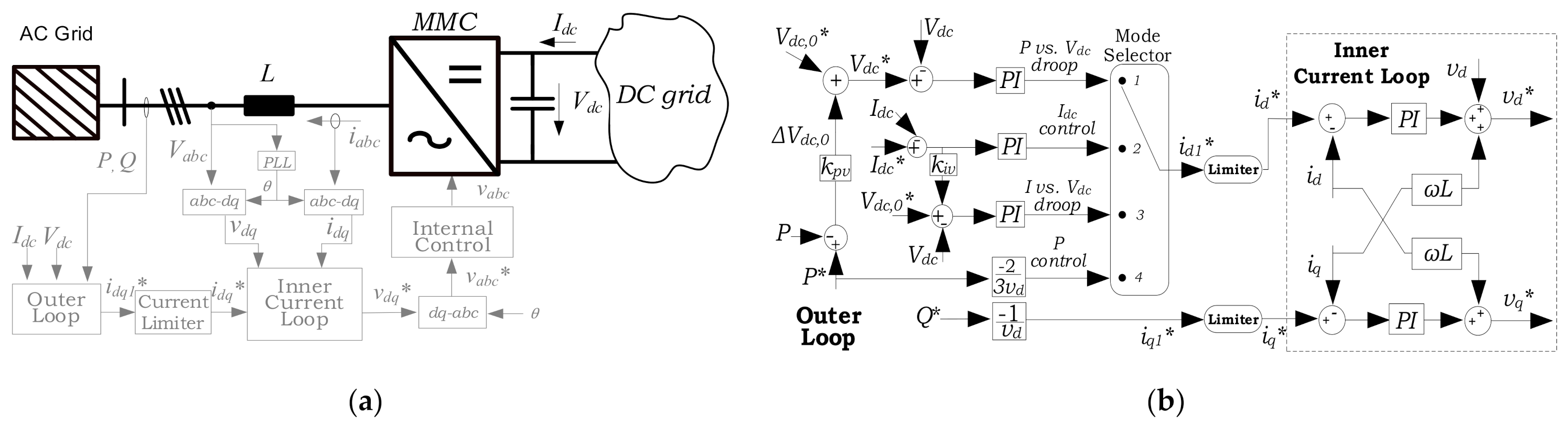
5.2. Control Structure of Grid-Tied MMC
5.3. Open-Access Simulation Tool for DC Networks
- Converter stations: with averaged and switched models of MMCs. Half and full-bridge submodules with arm reactors and AC circuit breakers are included. Averaged models can be employed to reduce the simulation time, while switched models may be used when an accurate assessment of system performance is required instead.
- High-level controllers: with three modes of operation including DC voltage control and reactive power control, active power and reactive power control and AC voltage and frequency control. The high-level controllers communicate with a dispatch controller which is used, in turn, to select the control mode and manage the operating set points. The reference voltages produced by the high-level controllers are communicated to a lower-level controller (modulator) to generate switching signals.
- Wind farm: a wind turbine generator with full power converters is modelled in detail and current injection is used to scale the generator output to the rated power of a wind farm.
- DC cables: using a frequency-dependent, travelling wave model based on the universal line model for the adequate simulation of electromagnetic transients [27].
- AC grid: adapted from the 9-bus system presented in [28].
6. Control Interaction Case Studies
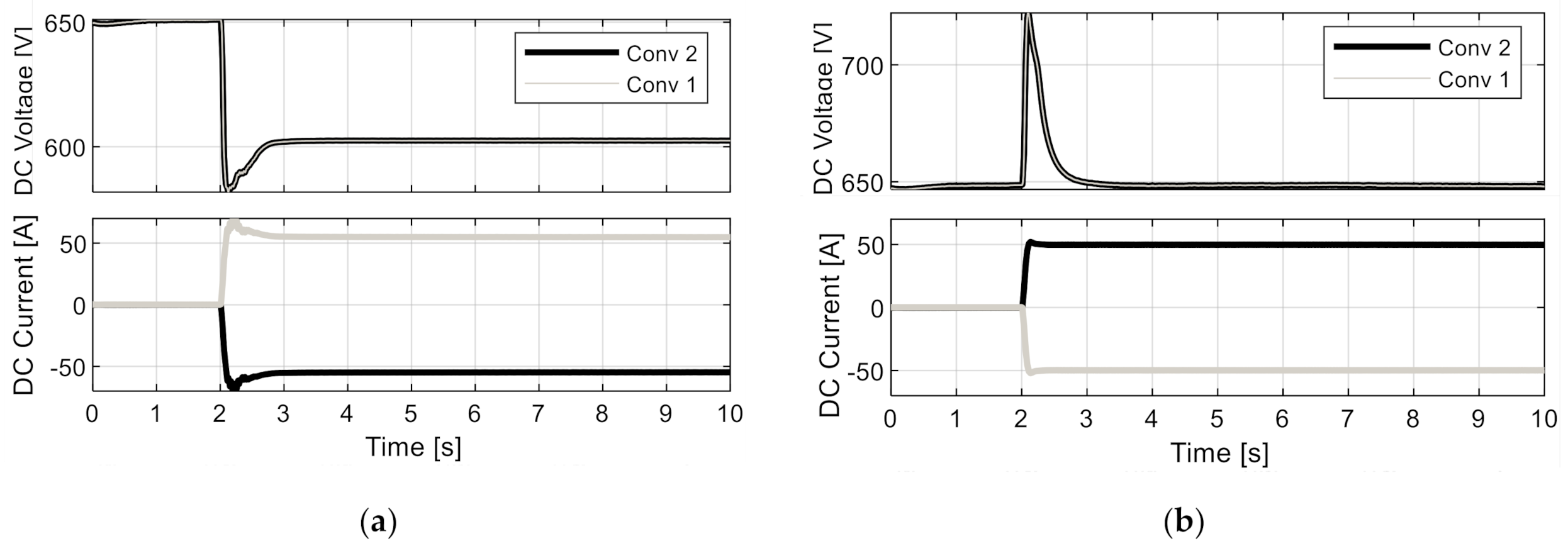
6.1. Experimental Results
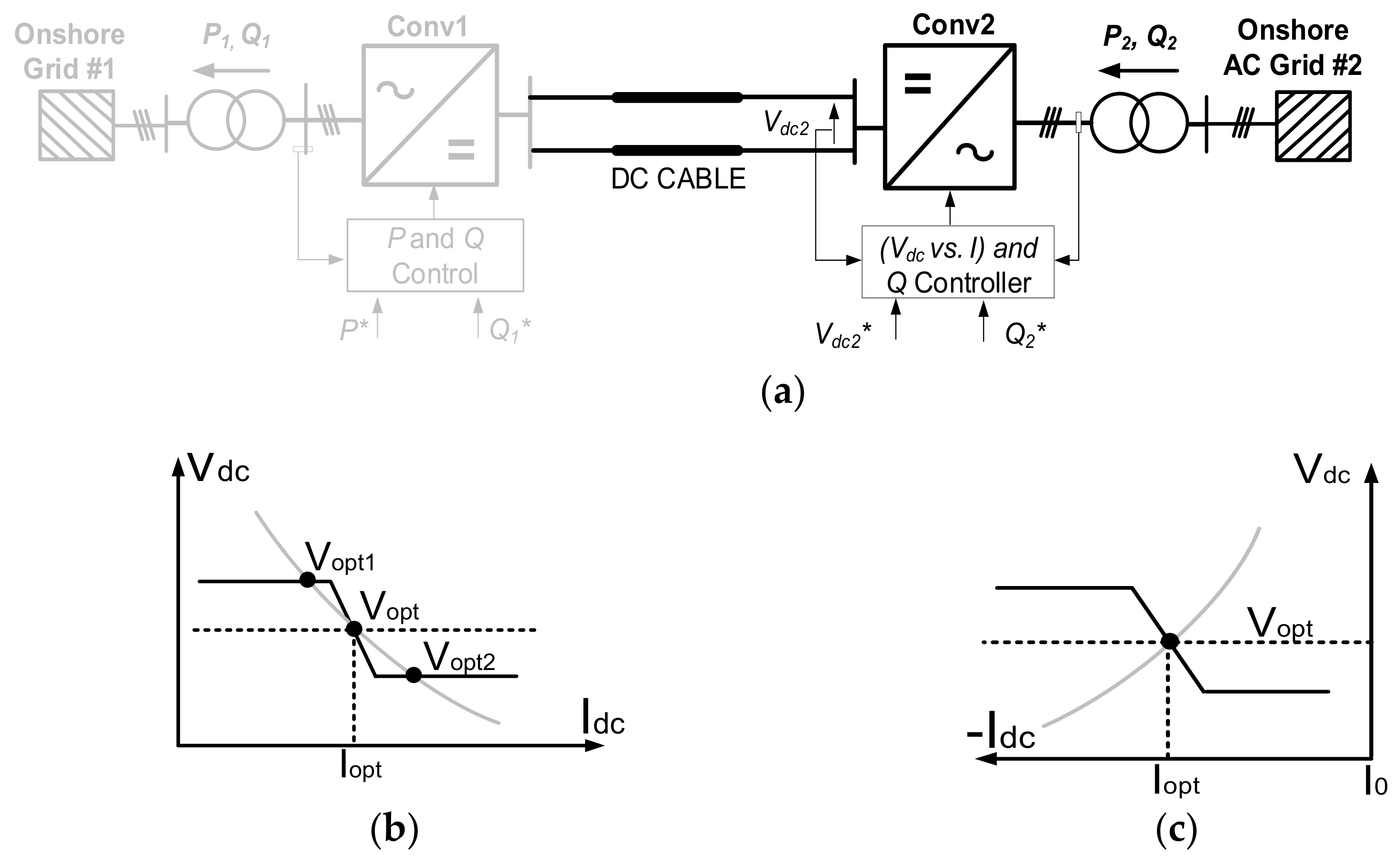
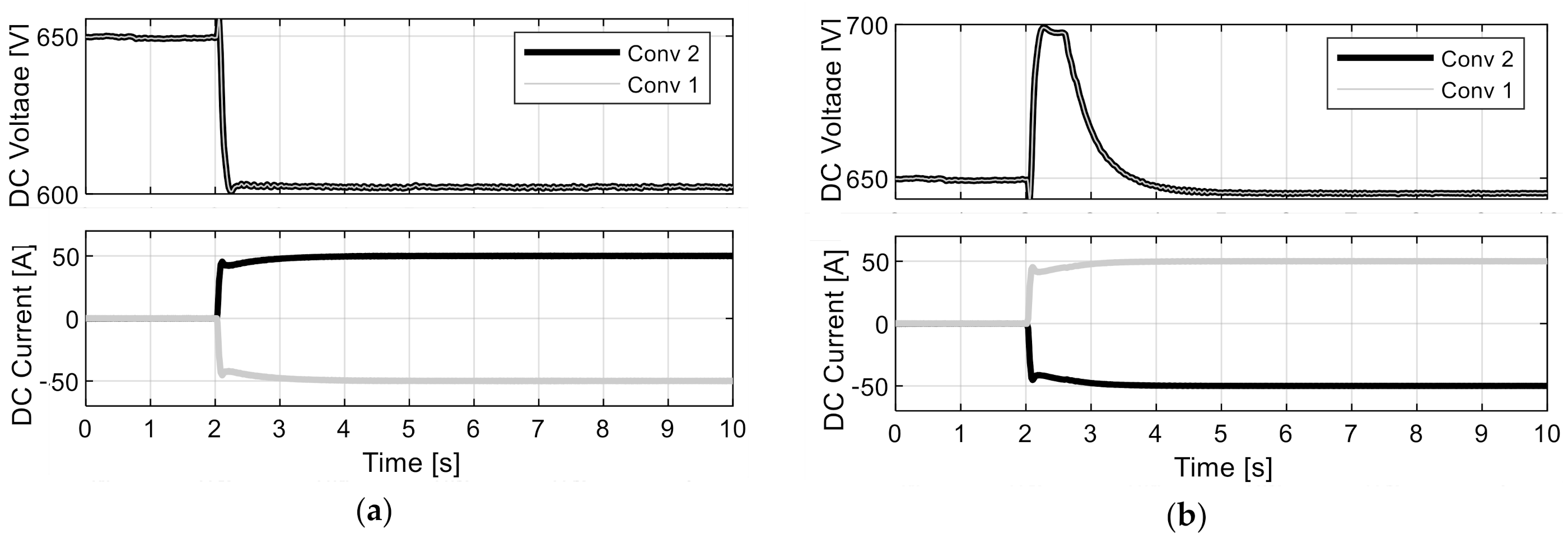
6.1.1. I vs. Vdc Droop against Power Control
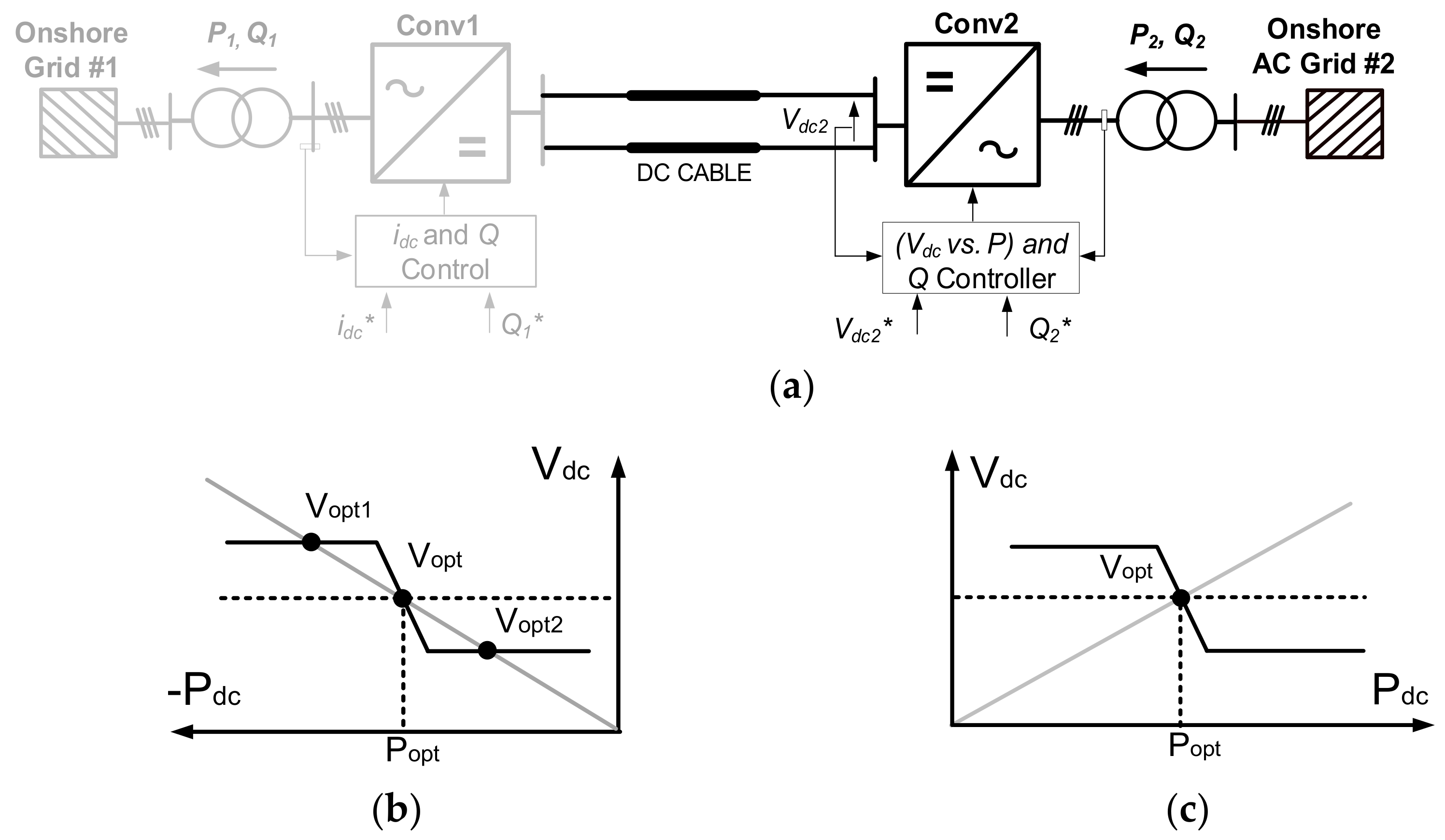
6.1.2. P vs. Vdc Droop against Current Control
6.2. Simulation Results
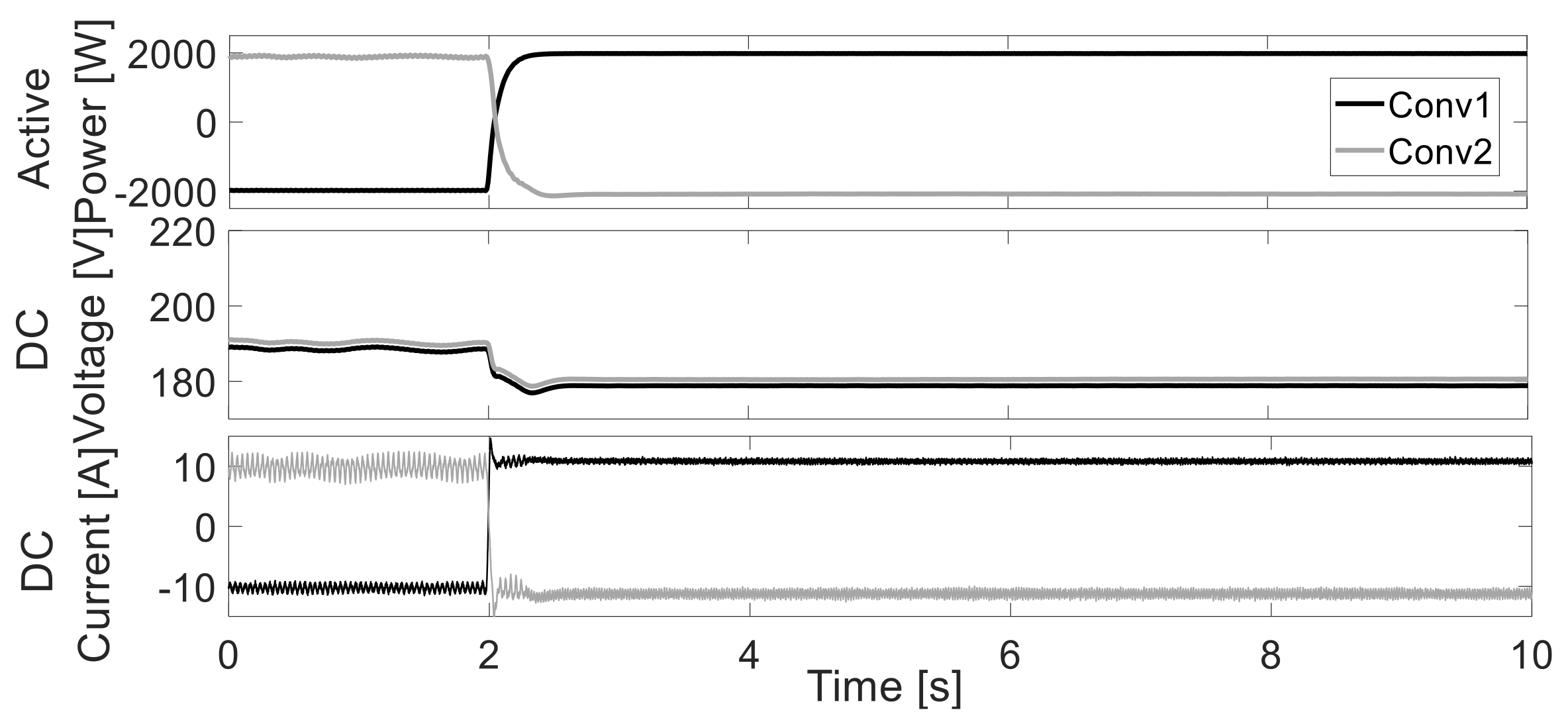
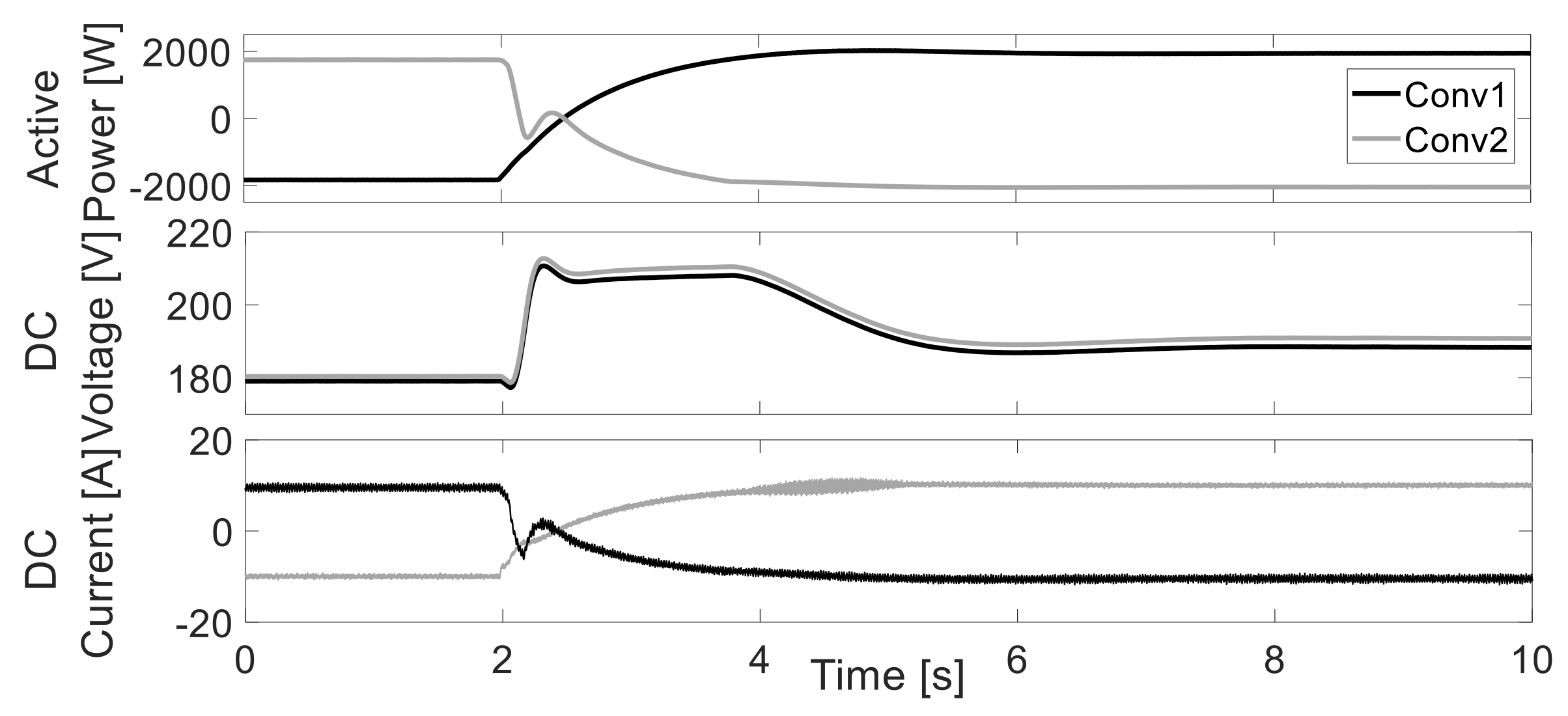
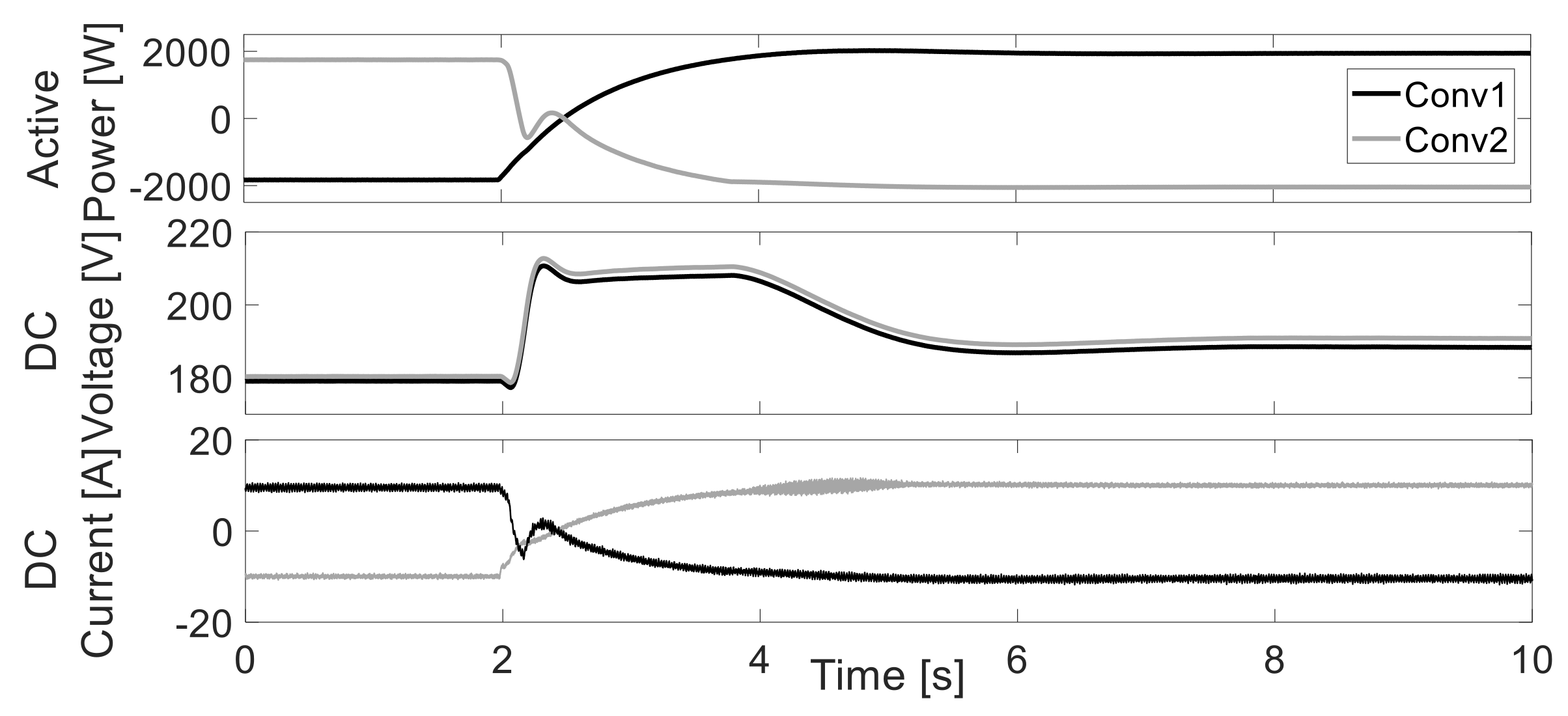
6.2.1. I vs. Vdc Droop against Power Control
- Conv1: MMC with 12-submodules using P control.
- Conv2: MMC with 6-submodules (inverter) in I vs. Vdc droop control, with DC voltage reference of 1 p.u. and droop gain of 1.25 p.u.
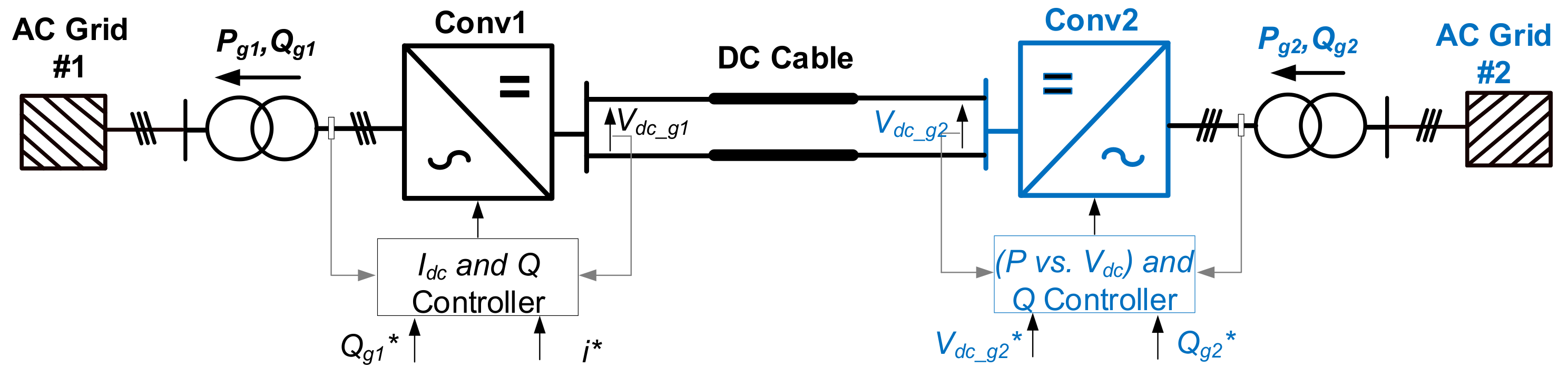
6.2.2. P vs. Vdc Droop against Current Control
- Conv1: MMC with 12-submodules with Idc control.
- Conv2: MMC with 6-submodules in P vs. Vdc droop control, with DC voltage reference of 1 p.u. and droop gain of 1.25 p.u.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. Parameters in MMC Demonstrator
Appendix A.2. Parameters in Simulation Model
References
- Shah, R.; Sánchez, J.C.; Preece, R.; Barnes, M. Stability and control of mixed AC–DC systems with VSC-HVDC: A review. IET Gener. Transm. Distrib. 2018, 12, 2207–2219. [Google Scholar] [CrossRef]
- Beddard, A.; Barnes, M.; Preece, R. Comparison of Detailed Modeling Techniques for MMC Employed on VSC-HVDC Schemes. IEEE Trans. Power Deliv. 2015, 30, 579–589. [Google Scholar] [CrossRef]
- Arai, T.; Sekiguchi, K.; Mochikawa, H.; Sano, K.; Fujita, H. Evaluation of Required Energy Storage in Neutral-Point-Clamped Modular Multilevel Converter for Downsizing Low-Voltage Grid Converters. IEEE Trans. Power Electron. 2021, 36, 6774–6786. [Google Scholar] [CrossRef]
- CIGRE Brochure 604 (WG B4-57). Guide for the Development of Models for HVDC Converters in a HVDC Grid. Cigré WG B 2014, 4, 27–32. [Google Scholar]
- Kaur, J.; Chaudhuri, N.R. Secondary Frequency Support to Weak Grids Through Coordinating Control of Hybrid HVDC System. IEEE Trans. Power Deliv. 2020, 35, 1685–1694. [Google Scholar] [CrossRef]
- Ceballos, S.; D’Arco, S.; Bergna, G.; Adeuyi, D.; Ugalde-Loo, C.E.; Barenys, M.; Parker, M.; Gatti, A.; Pitto, A.; Rapizza, M.; et al. BEST PATHS Deliverable D3.1. Models of WTG, HVDC Links, Offshore Grid. Control Algorithms, Models and Strategies; BEST PATHS: London, UK, 2016; pp. 1–68. [Google Scholar]
- Freytes, J.; Li, J.; de Préville, G.; Thouvenin, M. Grid-Forming Control with Current Limitation for MMC under Unbalanced Fault Ride-Through. IEEE Trans. Power Deliv. 2021, 36, 1914–1916. [Google Scholar] [CrossRef]
- ENTSO-E. Draft Network Code on High Voltage Direct Current Connections and DC-connected Power Park Modules; ENTSO-E: Brussels, Belgium, 2014. [Google Scholar]
- Bianchi, F.D.; Domínguez-García, J.L.; Gomis-Bellmunt, O. Control of multi-terminal HVDC networks towards wind power integration: A review. Renew. Sustain. Energy Rev. 2015, 55, 1055–1068. [Google Scholar] [CrossRef] [Green Version]
- Akhmatov, V.; Callavik, M.; Franck, C.M.; Rye, S.E.; Ahndorf, T.; Bucher, M.K.; Muller, H.; Schettler, F.; Wiget, R. Technical Guidelines and Prestandardization Work for First HVDC Grids. IEEE Trans. Power Deliv. 2014, 29, 327–335. [Google Scholar] [CrossRef] [Green Version]
- Muñoz, L.A.; Rios, M.A. Performance Comparison of Voltage Control Strategies of VSC-HVDC Grids. In Proceedings of the 2019 IEEE Workshop on Power Electronics and Power Quality Applications (PEPQA), Manizales, Colombia, 30–31 May 2019; pp. 1–5. [Google Scholar]
- Haileselassie, T.M.; Uhlen, K. Precise control of power flow in multiterminal VSC-HVDCs using DC voltage droop control. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 February 2012; pp. 1–9. [Google Scholar]
- Zhang, S.; Zhou, M.; Li, G. Applying power margin tracking droop control to flexible operation in multi-terminal DC collector systems of renewable generation. CSEE J. Power Energy Syst. 2021, 7, 1176–1186. [Google Scholar]
- Zhang, L.; Zou, Y.; Yu, J.; Qin, J.; Vijay, V.; Karady, G.G.; Shi, D.; Wang, Z. Modeling, control, and protection of modular multilevel converter-based multi-terminal HVDC systems: A review. CSEE J. Power Energy Syst. 2017, 3, 340–352. [Google Scholar] [CrossRef]
- Rouzbehi, K.; Miranian, A.; Candela, J.I.; Luna, A.; Rodriguez, P. A Generalized Voltage Droop Strategy for Control of Multiterminal DC Grids. IEEE Trans. Ind. Appl. 2015, 51, 607–618. [Google Scholar] [CrossRef]
- CIGRE Brochure 699 (WG B4.58). Control Methodologies for Direct Voltage and Power Flow in a Meshed HVDC Grid; CIGRE: Paris, France, 2017. [Google Scholar]
- Vrana, T.K.; Beerten, J.; Belmans, R.; Fosso, O.B. A classification of DC node voltage control methods for HVDC grids. Electr. Power Syst. Res. 2013, 103, 137–144. [Google Scholar] [CrossRef] [Green Version]
- Bibaya, L.; Liu, C.; Li, G. An Improved Coordinated Control Strategy of VSC-MTDC Distribution Network. In Proceedings of the 2018 2nd IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 20–22 October 2018; pp. 1–7. [Google Scholar]
- Chai, R.; Zhang, B.; Dou, J. Improved DC voltage margin control method for DC grid based on VSCs. In Proceedings of the 2015 IEEE 15th International Conference on Environment and Electrical Engineering (EEEIC), Rome, Italy, 10–13 June 2015; pp. 1683–1687. [Google Scholar]
- Liu, S.; Zheng, J.; Li, Z.; Li, R.; Fang, W.; Liu, X. Distributed Piecewise Droop Control of DC Microgrid with Improved Load Sharing and Voltage Compensation. In Proceedings of the 2019 IEEE Third International Conference on DC Microgrids (ICDCM), Shimane, Japan, 20–23 May 2019; pp. 1–6. [Google Scholar]
- Stamatiou, G.; Bongiorno, M. Power-dependent droop-based control strategy for multi-terminal HVDC transmission grids. IET Gener. Transm. Distrib. 2016, 11, 283–391. [Google Scholar] [CrossRef]
- Akkari, S.; Petit, M.; Dai, J.; Guillaud, X. Interaction between the voltage-droop and the frequency-droop control for multi-terminal HVDC systems. IET Gener. Transm. Distrib. 2016, 10, 1345–1352. [Google Scholar] [CrossRef] [Green Version]
- Barker, C.; Whitehouse, R.; Liang, J.; Wang, S. Risk of multiple cross-over of control characteristics in multi-terminal HVDC. IET Gener. Transm. Distrib. 2016, 10, 1353–1360. [Google Scholar] [CrossRef]
- Ugalde-Loo, C.E.; Adeuyi, O.D.; Wang, S.; Liang, J.; Jenkins, N.; Ceballos, S.; Santos, M.; Vidaurrazaga, I.; D’Arco, S.; Bergna, G.; et al. Open access simulation toolbox for the grid connection of offshore wind farms using multi-terminal HVDC networks. In Proceedings of the 13th IET International Conference on AC and DC Power Transmission (ACDC 2017), Manchester, UK, 14–16 February 2017; p. 54. [Google Scholar]
- D’Arco, S.; Torres, R.; Ljøkelsøy, K.; Guidi, G.; Reigstad, T.I.; Bergna, G. BEST PATHS Deliverable D8.1. Detailed Specification of the Demonstrator: Offshore Integration; BEST PATHS: London, UK, 2017; pp. 1–48. [Google Scholar]
- Xu, L.; Andersen, B.R.; Cartwright, P. VSC Transmission Operating Under Unbalanced AC Conditions—Analysis and Control Design. IEEE Trans. Power Deliv. 2005, 20, 427–434. [Google Scholar] [CrossRef]
- Morched, A.; Gustavsen, B.; Tartibi, M. A universal model for accurate calculation of electromagnetic transients on overhead lines and underground cables. IEEE Trans. Power Deliv. 1999, 14, 1032–1038. [Google Scholar] [CrossRef]
- Anderson, P.M.; Fouad, A.A. Power System Control and Stability; IEEE Press: Piscataway, NJ, USA, 2003. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Methods | Reference | Controller Structure | Distinctive Features |
|---|---|---|---|
| Conventional method with a single droop characteristic | [15] | Generic controller combining constant voltage/power and droop control. | Different control modes can be smoothly switched by selecting coefficients , and in . |
| [21] | Power control loop consisting of a PI controller with a negative feedback gain of 1/k. | The method provides a filtered droop signal to the voltage controller during transients, preventing large DC voltage changes—thereby improving the dynamic performance. | |
| [22] | Frequency and voltage droop loops are incorporated to the active power reference. | The method enables the DC system to participate in DC voltage and AC frequency regulation concurrently. | |
| Improved method with multiple droop characteristics | [17,18,19,20] | Outer loops with different droop slopes are integrated to create multiple droop characteristics. | The impact on power flow due to the drift in DC voltage is mitigated—the accuracy of the DC power flow control is thus improved. |
| [23] | One converter station operates with constant power control and the other station with current versus voltage droop control. | The adverse interaction caused by this control configuration in an HVDC link is first reported. The analysis is verified through computer simulations. | |
| This paper | Two configurations are studied: constant power and current versus voltage droop control; and constant current and power versus voltage droop control. | The adverse impact caused by these control configurations in the performance of DC voltage and power is analysed. The interactions are demonstrated through software simulations using an open access toolbox and experimentally with a 60-kW MMC test-rig. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Wang, S.; Ugalde-Loo, C.E.; Ming, W.; Adeuyi, O.D.; D’Arco, S.; Ceballos, S.; Parker, M.; Finney, S.; Pitto, A.; et al. Demonstration of Converter Control Interactions in MMC-HVDC Systems. Electronics 2022, 11, 175. https://doi.org/10.3390/electronics11020175
Chen J, Wang S, Ugalde-Loo CE, Ming W, Adeuyi OD, D’Arco S, Ceballos S, Parker M, Finney S, Pitto A, et al. Demonstration of Converter Control Interactions in MMC-HVDC Systems. Electronics. 2022; 11(2):175. https://doi.org/10.3390/electronics11020175
Chicago/Turabian StyleChen, Jinlei, Sheng Wang, Carlos E. Ugalde-Loo, Wenlong Ming, Oluwole D. Adeuyi, Salvatore D’Arco, Salvador Ceballos, Max Parker, Stephen Finney, Andrea Pitto, and et al. 2022. "Demonstration of Converter Control Interactions in MMC-HVDC Systems" Electronics 11, no. 2: 175. https://doi.org/10.3390/electronics11020175
APA StyleChen, J., Wang, S., Ugalde-Loo, C. E., Ming, W., Adeuyi, O. D., D’Arco, S., Ceballos, S., Parker, M., Finney, S., Pitto, A., Cirio, D., & Azpiri, I. (2022). Demonstration of Converter Control Interactions in MMC-HVDC Systems. Electronics, 11(2), 175. https://doi.org/10.3390/electronics11020175