



Decreasing the Negative Impact of Time Delays on Electricity Due to Performance Improvement in the Rwanda National Grid



Abstract
:1. Introduction
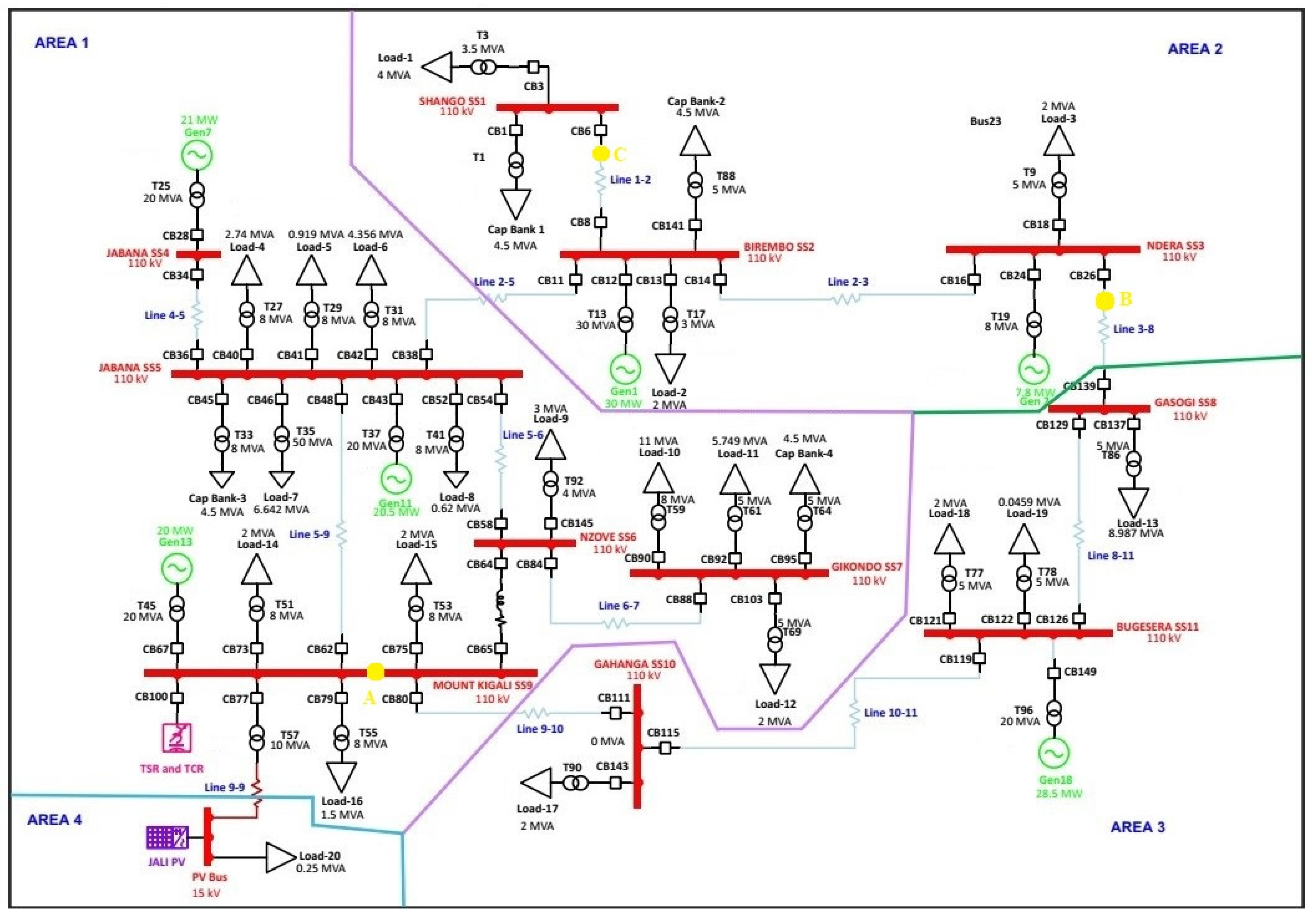
2. Kigali National Grid Description
3. Communication Delay Issues with Combined TSC and TCR Controller
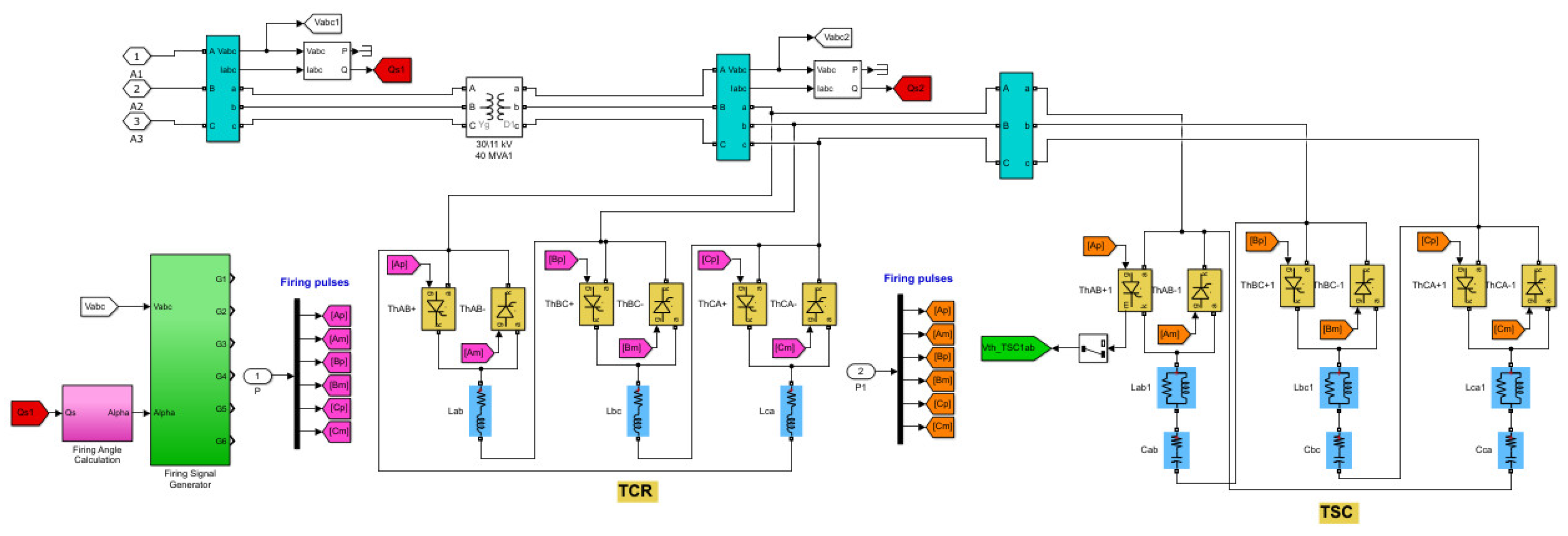
3.1. Combined TSC and TCR Model
3.2. Causes of Electrical Network Communication Delays
3.3. TSC-TCR Controller Time Delay Issue
3.4. Performance Expectations
4. Modeling the Problem to Suggest a Solution, Including Developing Communication Delay Reduction Solutions
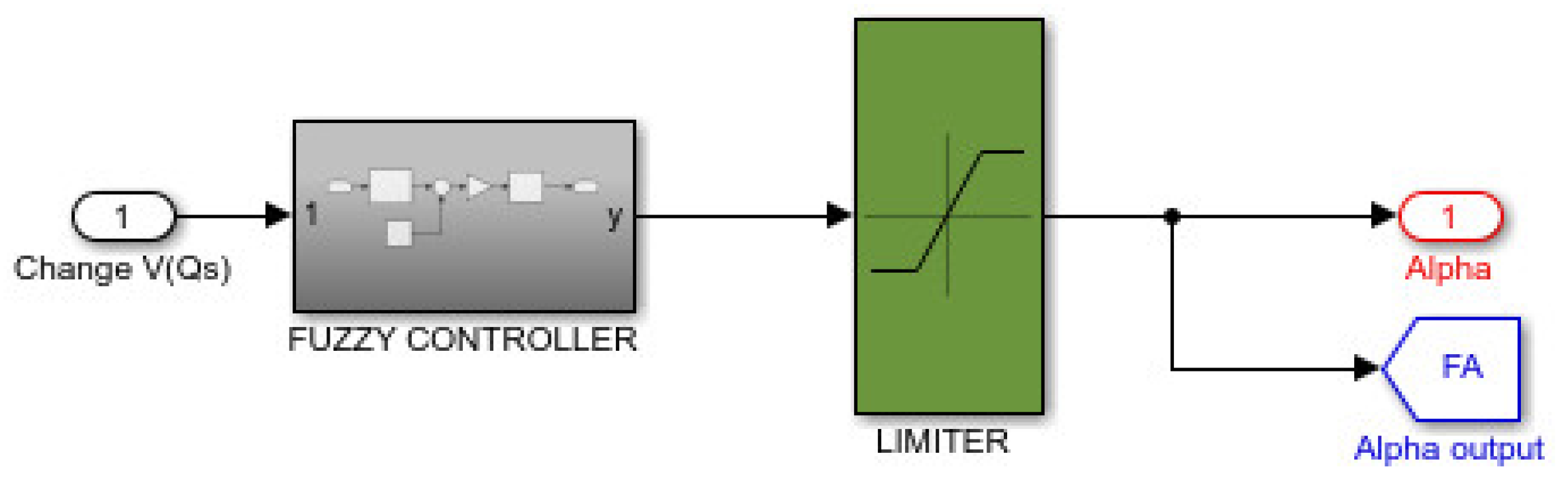
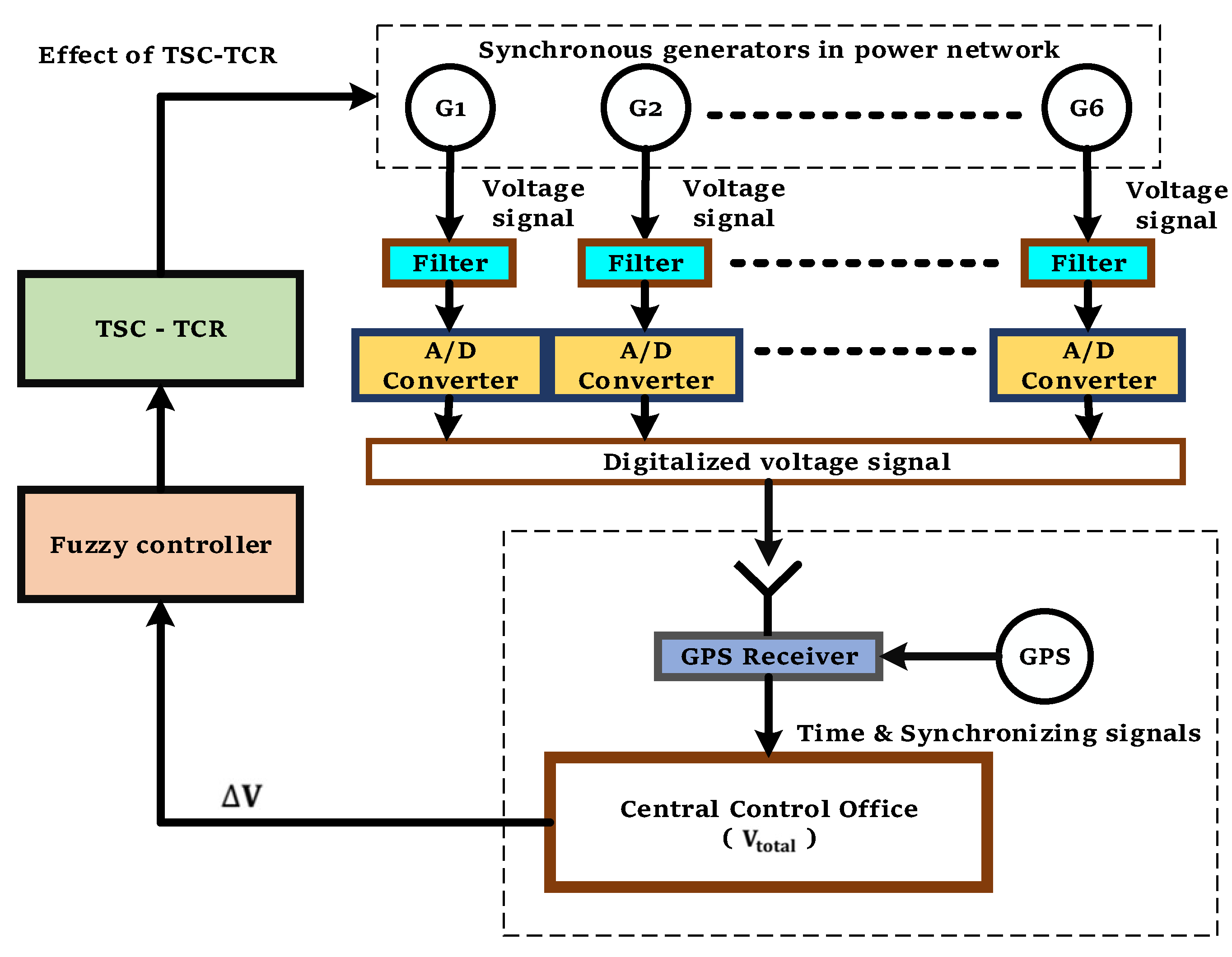
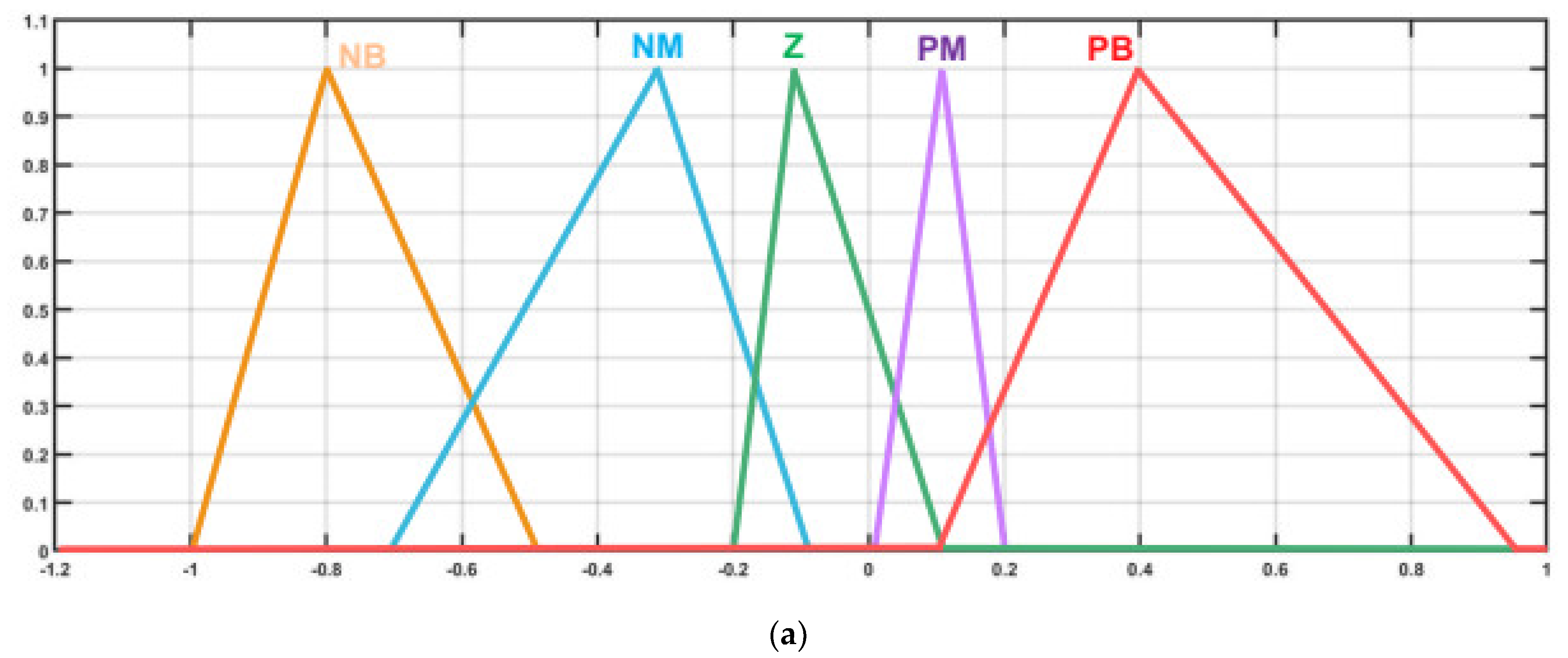
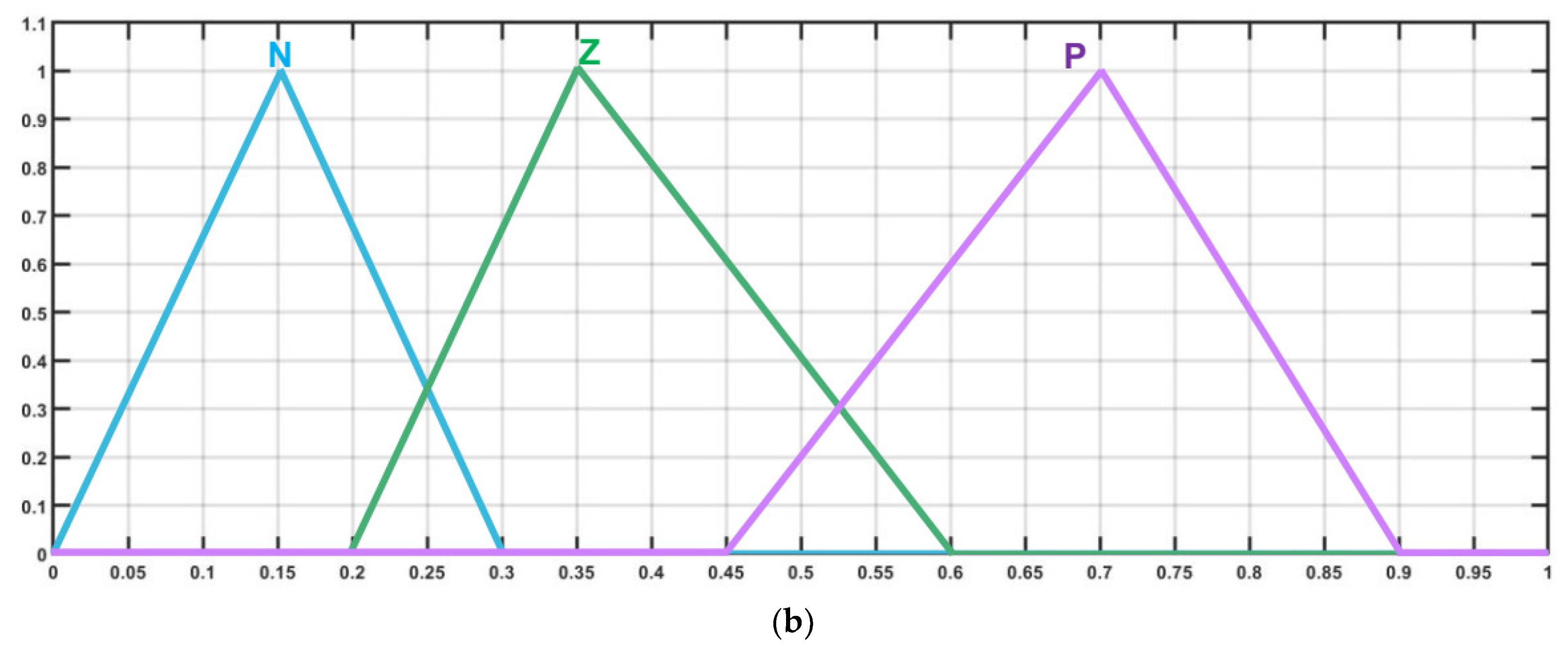
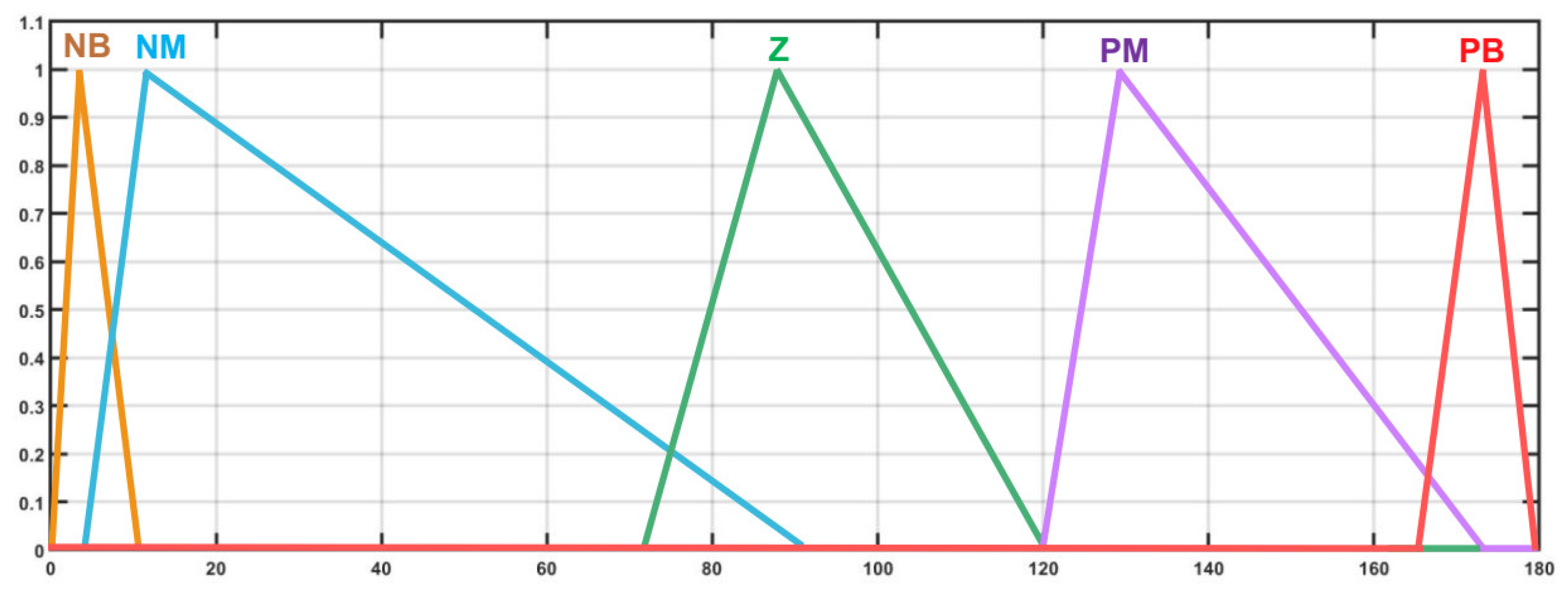
4.1. Method Using FLC
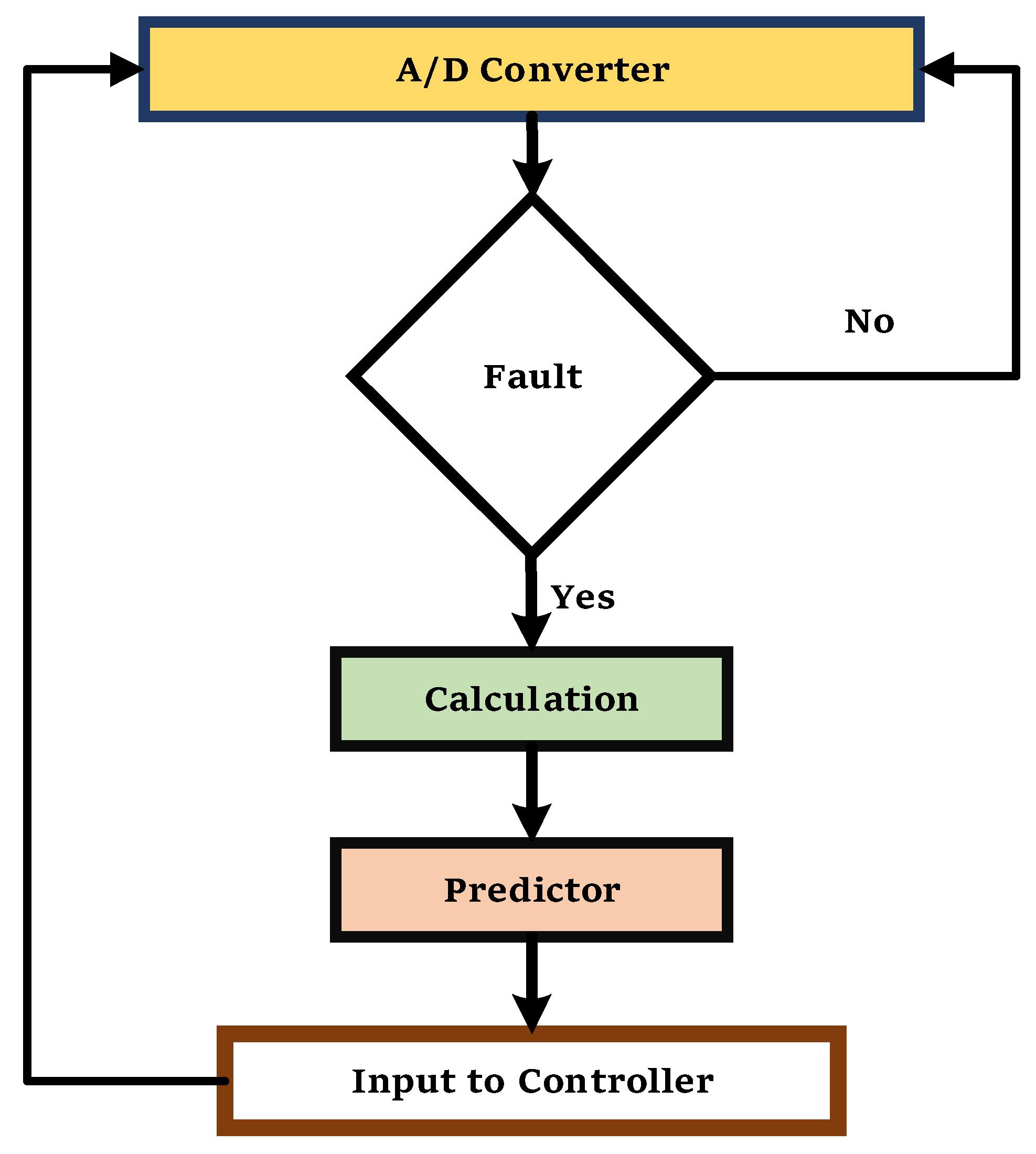
4.2. Adapted Predictor Method
5. Simulation Results and Discussion
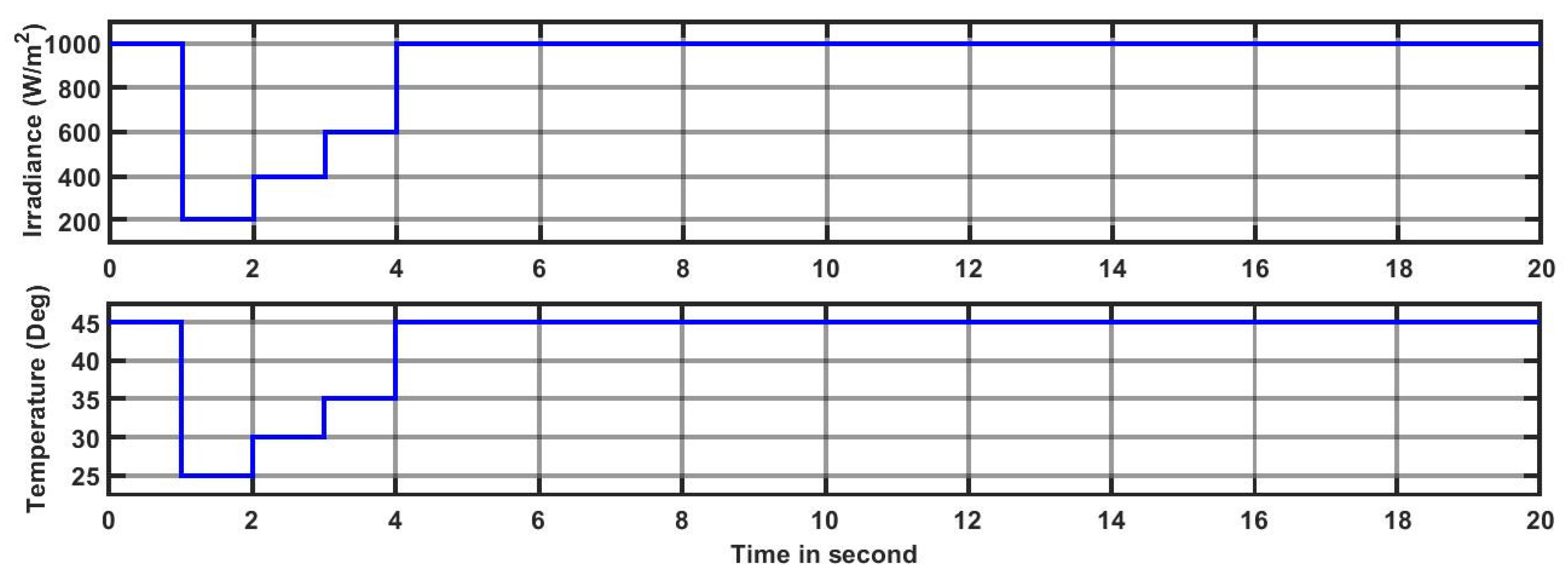
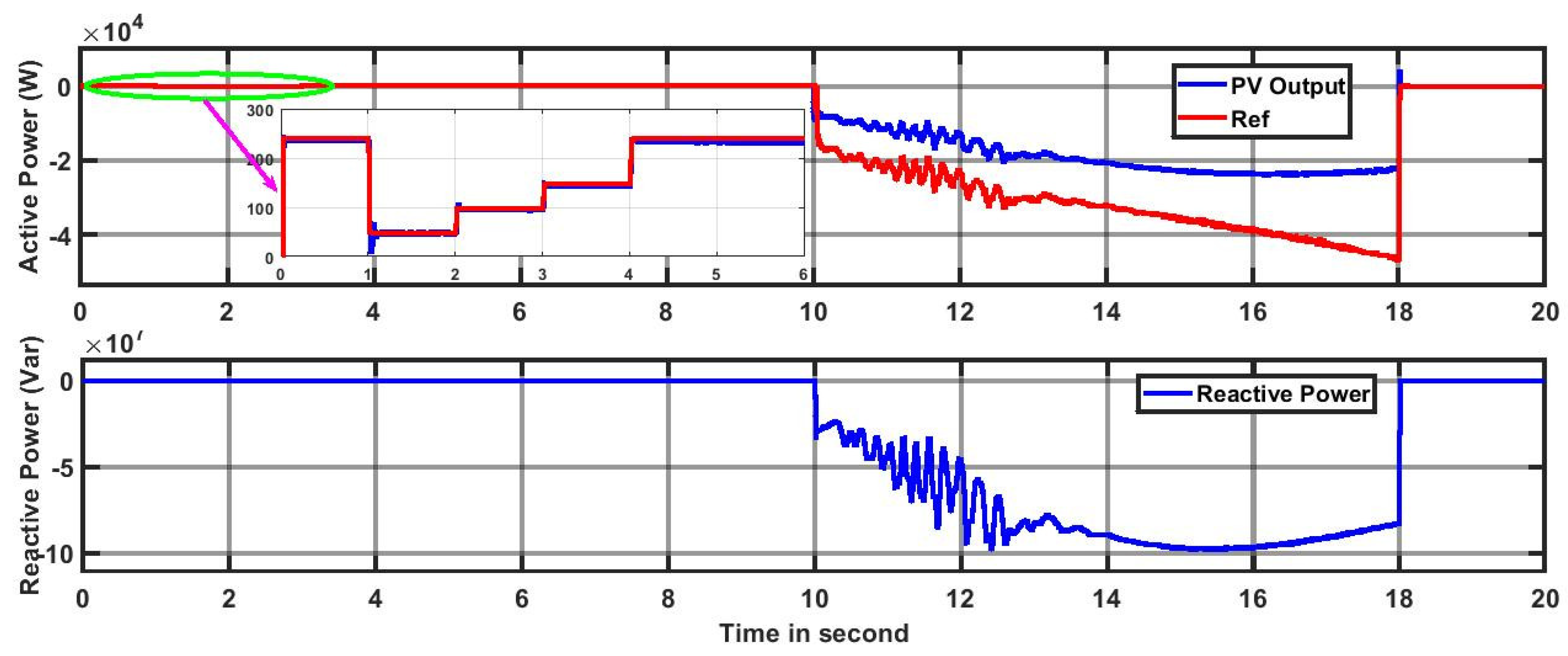
5.1. PV Jali in Grid-Following Mode, PQ Control, and Irradiance Variation
5.2. Effect of Time Delay without Minimization Methods
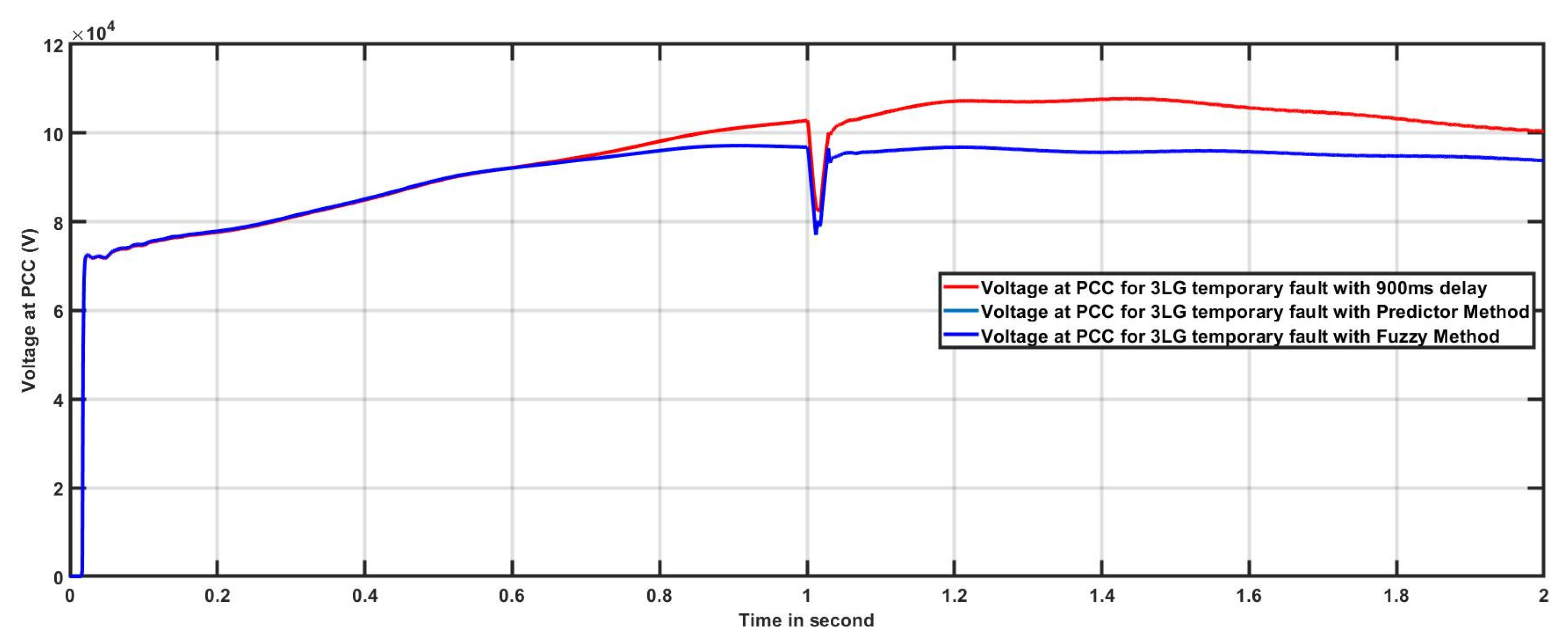
5.3. The Proposed Method’s Performance in Terms of the Voltage Index
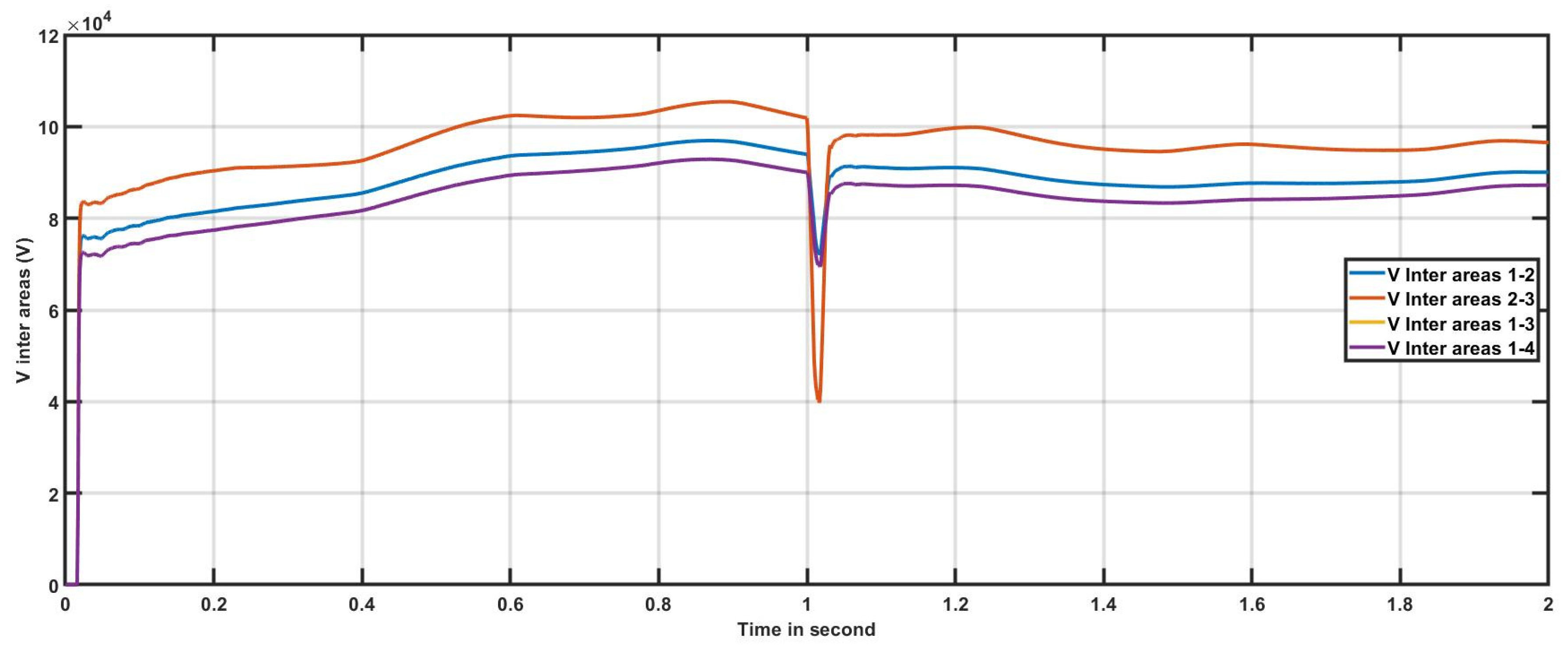
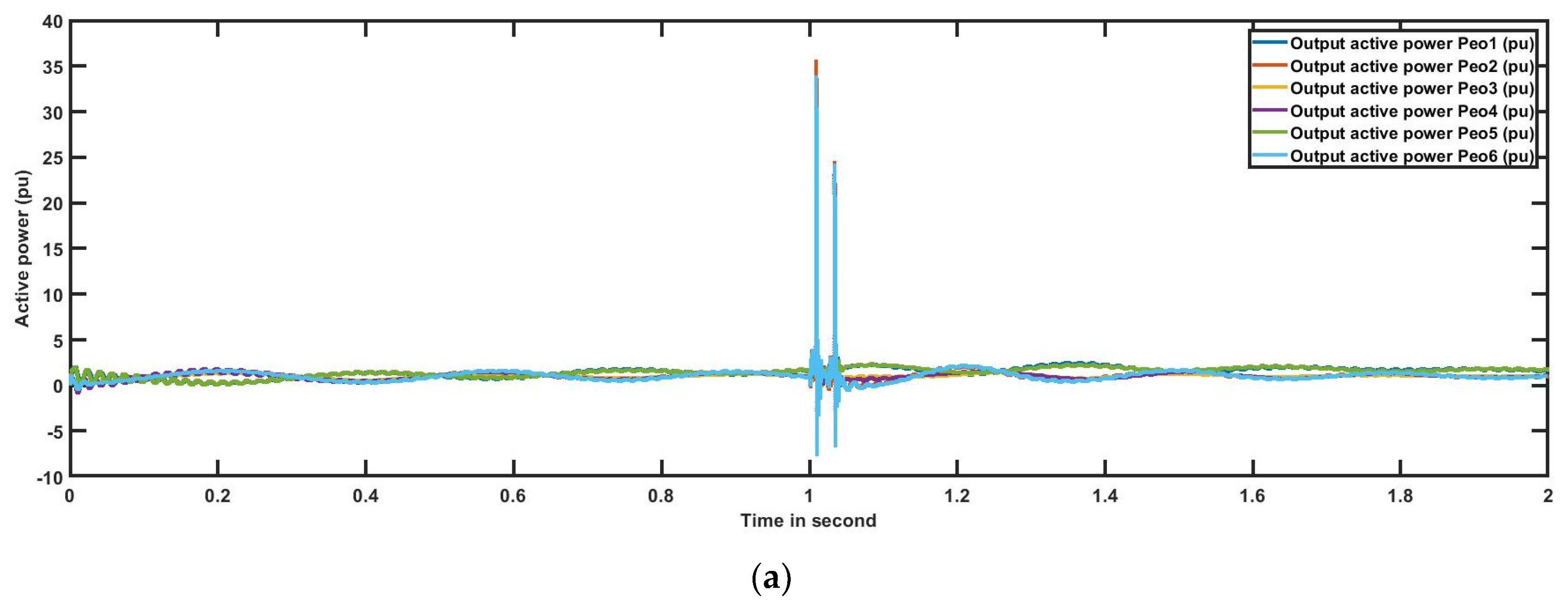
5.4. Plot Performance of Proposed Risk Mitigation Methods
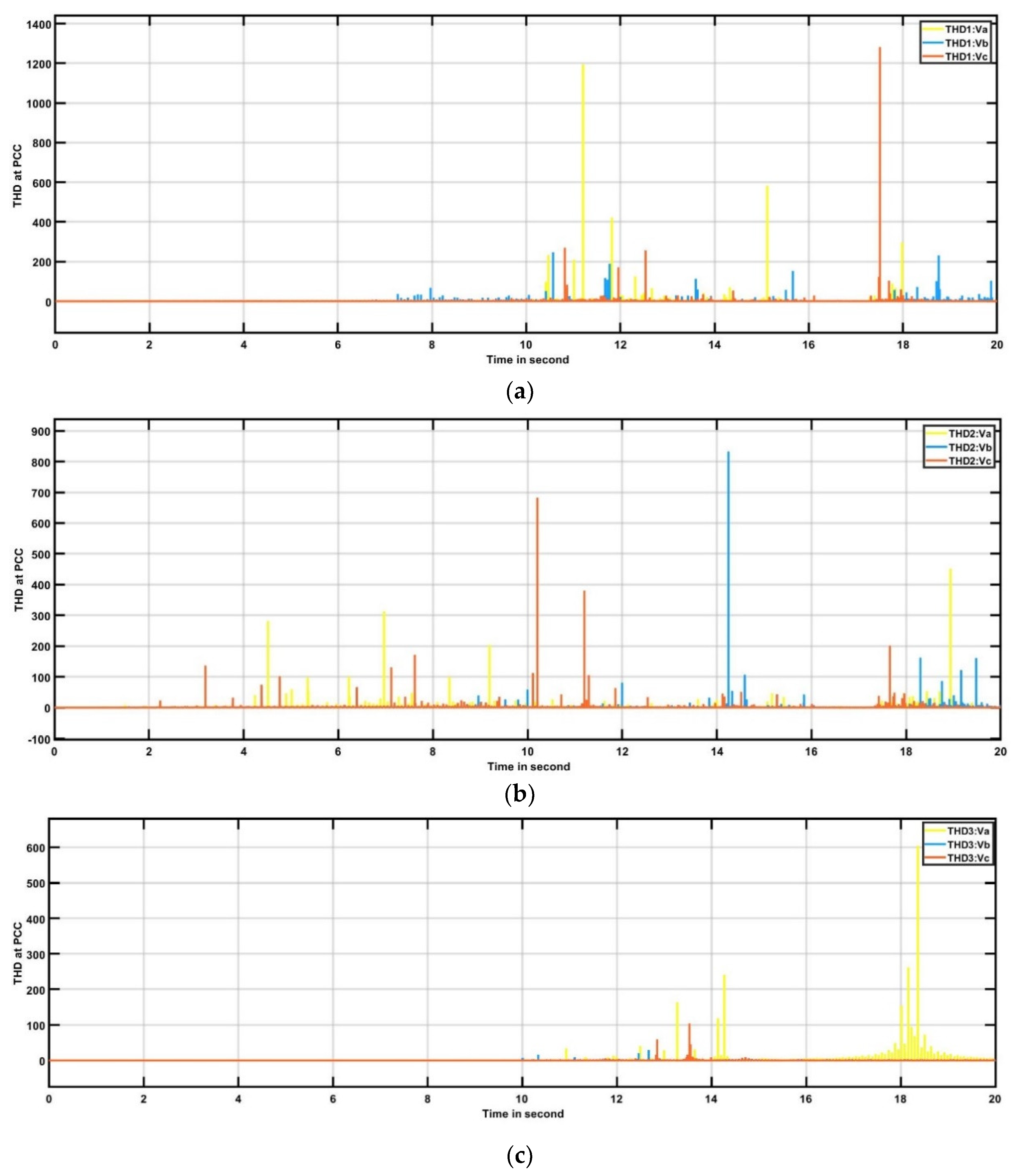
5.5. THD Performance of Suggested Minimization Methods
5.6. Nonlinear Load Harmonic Spectrum
5.7. TSC-TCR’s Cost-Effectiveness
6. Conclusions
- (1)
- The presented strategies were suitable in minimizing the negative impact of significant delays on the hybrid power system power quality improvement;
- (2)
- In most cases, fuzzy-controlled methods represented excellent alternatives to modified predictor methods;
- (3)
- It was possible that the burden could be controlled if the response was fast (less than 1 s), which could help in inertia response;
- (4)
- The plan to use SVCs and shunt reactors is not enough when using TSC-TCR (in the REG situation of resolving the Shango SS1 and Bugesera SS11 connection problems).
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Muyizere, D.; Letting, L.K.; Munyazikwiye, B.B. Effects of Communication Signal Delay on the Power Grid: A Review. Electronics 2022, 11, 874. [Google Scholar] [CrossRef]
- Chompoobutrgool, Y.; Vanfretti, L.; Ghandhari, M. Survey on power system stabilizers control and their prospective applications for power system damping using Synchrophasor-based wide-area systems. Eur. Trans. Electr. Power 2011, 21, 2098–2111. [Google Scholar] [CrossRef]
- Li, M.; Chen, Y. A Wide-Area Dynamic Damping Controller Based on Robust H∞ Control for Wide-Area Power Systems with Random Delay and Packet Dropout. IEEE Trans. Power Syst. 2018, 33, 4026–4037. [Google Scholar] [CrossRef]
- Ghosh, S.; Ali, M.H. Minimization of Adverse Effects of Time Delay on Power Quality Enhancement in Hybrid Grid. IEEE Syst. J. 2019, 13, 3091–3101. [Google Scholar] [CrossRef]
- Khalili, M.; Ali Dashtaki, M.; Nasab, M.A.; Reza Hanif, H.; Padmanaban, S.; Khan, B. Optimal instantaneous prediction of voltage instability due to transient faults in power networks taking into account the dynamic effect of generators. Cogent Eng. 2022, 9, 2072568. [Google Scholar] [CrossRef]
- Salman, G.A.; Abood, H.G.; Ibrahim, M.S. Improvement the voltage stability margin of Iraqi power system using the optimal values of FACTS devices. Int. J. Electr. Comput. Eng. 2021, 11, 984–992. [Google Scholar] [CrossRef]
- Aikins, L.; Kwaku Amuzuvi, C. Power System Stability Improvement of Ghana’s Generation and Transmission System Using FACTS Devices. J. Electr. Electron. Eng. 2020, 8, 47. [Google Scholar] [CrossRef]
- Hoseynpoor, M.; Najafi, M.; Ebrahimi, R.; Davoodi, M. Power system stability improvement using comprehensive FACTS devices. Int. Rev. Model. Simul. 2011, 4, 1660–1665. [Google Scholar]
- Stahlhut, J.W.; Browne, T.J.; Heydt, G.T.; Vittal, V. Latency viewed as a stochastic process and its impact on wide area power system control signals. IEEE Trans. Power Syst. 2008, 23, 84–91. [Google Scholar] [CrossRef]
- Mokhtari, M.; Zouggar, S.; M’sirdi, N.K.; Elhafyani, M.L. Voltage regulation of an asynchronous wind turbine using statcom and a control strategy based on a combination of single input fuzzy logic regulator and sliding mode controllers. Int. J. Power Electron. Drive Syst. 2020, 11, 1557–1569. [Google Scholar] [CrossRef]
- Liu, S.; Wang, X.; Liu, P.X. Impact of Communication Delays on Secondary Frequency Control in an Islanded Microgrid. IEEE Trans. Ind. Electron. 2015, 62, 2021–2031. [Google Scholar] [CrossRef]
- Amin, M.; Al-Durra, A.; Elmannai, W. Experimental Validation of High-Performance HIL-Based Real-Time PMU Model for WAMS. IEEE Trans. Ind. Appl. 2020, 56, 2382–2392. [Google Scholar] [CrossRef]
- Fan, Z.; Kulkarni, P.; Gormus, S.; Efthymiou, C.; Kalogridis, G.; Sooriyabandara, M.; Zhu, Z.; Lambotharan, S.; Chin, W.H. Smart grid communications: Overview of research challenges, solutions, and standardization activities. IEEE Commun. Surv. Tutor. 2013, 15, 21–38. [Google Scholar] [CrossRef]
- Nan, J.; Yao, W.; Wen, J.; Peng, Y.; Fang, J.; Ai, X.; Wen, J. Wide-area power oscillation damper for DFIG-based wind farm with communication delay and packet dropout compensation. Int. J. Electr. Power Energy Syst. 2021, 124, 106306. [Google Scholar] [CrossRef]
- Liu, M.; Dassios, I.; Milano, F. Delay margin comparisons for power systems with constant and time-varying delays. Electr. Power Syst. Res. 2021, 190, 106627. [Google Scholar] [CrossRef]
- Bimali, B.; Uprety, S.; Pandey, R.P. VAR Compensation on Load Side using Thyristor Switched Capacitor and Thyristor Controlled Reactor. J. Inst. Eng. 2021, 16, 111–119. [Google Scholar] [CrossRef]
- Ghaeb, J.A.; Alkayyali, M.; Tutunji, T.A. Wide Range Reactive Power Compensation for Voltage Unbalance Mitigation in Electrical Power Systems. Electr. Power Compon. Syst. 2022, 49, 715–728. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, Y.; Liu, F.; Cao, Y.; Rehtanz, C. Design and Implementation of Delay-Dependent Wide-Area Damping Control for Stability Enhancement of Power Systems. IEEE Trans. Smart Grid 2017, 8, 1831–1842. [Google Scholar] [CrossRef]
- Zappone, A.; Sanguinetti, L.; Debbah, M. Energy-Delay Efficient Power Control in Wireless Networks. IEEE Trans. Commun. 2018, 66, 418–431. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Yen, K.K.; Abdelghani, M.N. Preventing Time-Delay Switch Attack on Load Frequency Control in Distributed Power Systems. IEEE Trans. Smart Grid 2016, 7, 1–10. [Google Scholar] [CrossRef]
- Molina-Cabrera, A.; Ríos, M.A.; Besanger, Y.; Hadjsaid, N.; Montoya, O.D. Latencies in power systems: A database-based time-delay compensation for memory controllers. Electronics 2021, 10, 208. [Google Scholar] [CrossRef]
- Musleh, A.S.; Muyeen, S.M.; Al-Durra, A.; Kamwa, I.; Masoum, M.A.S.; Islam, S. Time-Delay Analysis of Wide-Area Voltage Control Considering Smart Grid Contingences in a Real-Time Environment. IEEE Trans. Ind. Inform. 2018, 14, 1242–1252. [Google Scholar] [CrossRef]
- Ullah, U.; Khan, A.; Altowaijri, S.M.; Ali, I.; Rahman, A.U.; Vijay Kumar, V.; Ali, M.; Mahmood, H. Cooperative and delay minimization routing schemes for dense under water wireless sensor networks. Symmetry 2019, 11, 195. [Google Scholar] [CrossRef]
- Hai-Long, Z.; Guo-Yi, Z. A time synchronization method of power grid based on TD—LTE frame synchronization. In Proceedings of the IEEE Power and Energy Society General Meeting, Chicago, IL, USA, 1 February 2018; pp. 1–5. [Google Scholar]
- Padhy, B.P. Adaptive latency compensator considering packet drop and packet disorder for wide area damping control design. Int. J. Electr. Power Energy Syst. 2019, 106, 477–487. [Google Scholar] [CrossRef]
- Zhang, F.; Cheng, L.; Li, X.; Sun, Y.Z. A Prediction-Based Hierarchical Delay Compensation (PHDC) Technique Enhanced by Increment Autoregression Prediction for Wide-Area Control Systems. IEEE Trans. Smart Grid 2020, 11, 1253–1263. [Google Scholar] [CrossRef]
- Park, J.; Jang, G.; Son, K.M. Modeling and control of VSI type FACTS controllers for power system dynamic stability using the current injection method. Int. J. Control Autom. Syst. 2008, 6, 495–505. [Google Scholar]
- Zand, M.; Nasab, M.A.; Hatami, A.; Kargar, M.; Chamorro, H.R. Using adaptive fuzzy logic for intelligent energy management in hybrid vehicles. In Proceedings of the 2020 28th Iranian Conference on Electrical Engineering, ICEE 2020, Tabriz, Iran, 4–6 August 2020. [Google Scholar]
- Manikandan, S.; Kokil, P. Stability analysis of load frequency control system with constant communication delays. In Proceedings of the 6th Conference on Advances in Control and Optimization of Dynamical Systems ACODS 2020, Chennai, India, 16–19 February 2020. [Google Scholar]
- Rwanda Energy Group. Rwanda: Least Cost Power Development Plan (LCPDP) 2020–2040. Nyarugenge City, Kigali-Rwanda. 2021. Available online: https://www.reg.rw/fileadmin/user_upload/Least_Cost_Power_Development_Plan_2020-2024.pdf (accessed on 17 May 2022).
- Rwanda Energy Group. Rwanda Electricity Distribution Master Plan. June 2021 Revision. 2021. Available online: https://www.reg.rw/fileadmin/user_upload/Rwanda_Electricity_Distribution_Master_Plan.PDF (accessed on 17 May 2022).
- Rwanda Energy Group Limited. Annual Report For Rwanda Energy Group, of the Year 2019–2020. District, Nyarugenge City, Kigali-Rwanda. 2020. Available online: https://www.reg.rw/fileadmin/REG_ANNUAL_REPORT_2020-2021_V3.pdf (accessed on 30 September 2021).
- Rwanda Energy Group (REG). Transmission Master Plan for Rwanda Plan (2020–2028). No. June. 2019, pp. 1–57. Available online: https://www.reg.rw/fileadmin/user_upload/Rwanda_Transmission_Master_Plan_2020_-_2028.pdf (accessed on 30 June 2021).
- Rwanda Energy Group (REG). Distribution. Available online: https://www.reg.rw/what-we-do/distribution/ (accessed on 17 May 2022).
- Shukla, S. Smart ANN Controller for TCR/TSC Devices used in Power System Applications. Int. J. Emerg. Trends Eng. Res. 2020, 8, 3534–3537. [Google Scholar] [CrossRef]
- Jing, W.; Chang, F.; Wang, G.; Chen, J. Research on TSC control strategy based on the average of TCR threephase trigger angles. Zhongshan Daxue Xuebao/Acta Sci. Natralium Univ. Sunyatseni 2021, 60, 54–61. [Google Scholar] [CrossRef]
- Awad, F.; Mansour, A.; Elzahab, E.A. Reduction of harmonics generated by thyristor controlled reactor for RL loads. In Proceedings of the ACCS/PEIT 2017–2017 International Conference on Advanced Control Circuits Systems and 2017 International Conference on New Paradigms in Electronics and Information Technology, Alexandria, Egypt, 5–8 November 2017. [Google Scholar]
- Gamal, M.; Sadek, N.; Rizk, M.R.M.; Abou-Elsaoud, A.K. Delay compensation using Smith predictor for wireless network control system. Alex. Eng. J. 2016, 55, 1421–1428. [Google Scholar] [CrossRef]
- Mokhtari, M.; Aminifar, F.; Nazarpour, D.; Golshannavaz, S. Wide-area power oscillation damping with a fuzzy controller compensating the continuous communication delays. IEEE Trans. Power Syst. 2013, 28, 1997–2005. [Google Scholar] [CrossRef]
- Tiep, D.K.; Lee, K.; Im, D.Y.; Kwak, B.; Ryoo, Y.J. Design of fuzzy-PID controller for path tracking of mobile robot with differential drive. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 220–228. [Google Scholar] [CrossRef]
- Hossain, M.K.; Ali, M.H. Transient Stability Augmentation of PV/DFIG/SG-Based Hybrid Power System by Nonlinear Control-Based Variable Resistive FCL. IEEE Trans. Sustain. Energy 2015, 6, 1638–1649. [Google Scholar] [CrossRef]
- Muyizere, D.; Letting, L.K.; Munyazikwiye, B.B. Under-frequency Load Shedding on the Performance Time Delay Relays of Transmission lines with difference Controllers. In Proceedings of the 2021 IEEE Southern Power Electronics Conference, SPEC 2021, Kigali, Rwanda, 6–9 December 2021. [Google Scholar]
- Ghosh, S.; Ali, M.H. Minimization of adverse effects of time delay in smart power grid. In Proceedings of the 2014 IEEE PES Innovative Smart Grid Technologies Conference, ISGT 2014, Washington, DC, USA, 19–22 February 2014. [Google Scholar]
- Nasini, P.R.; Narra, N.R.; Santosh, A. Modeling And Harmonic Analysis Of Domestic/Industrial Loads. Int. J. Eng. Res. Appl. 2012, 2, 485–491. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Devices | Numbers |
|---|---|
| Substations | 11 |
| Shunt Reactor | 1 |
| Capacitor Bank | 2 |
| Buses | 69 |
| Machines | 6 |
| Loads | 20 |
| Branches | 13 |
| Two-winding transformers | 27 |
| PV System | 1 |
| ΔV | NB | NM | Z | PM | PB | |
|---|---|---|---|---|---|---|
| D | ||||||
| N | PB | PM | Z | NM | NB | |
| Z | PB | PM | Z | NM | NB | |
| P | PB | PM | Z | NM | NB | |
| Temperature (°C) | Irradiation (W/m2) | Active Power (Kw) | Load Capacity (Kw) | ||||
|---|---|---|---|---|---|---|---|
| PV | Grid | ||||||
| 4 | 45 | 1000 | 481.2 | 241.5 | 117.5 | −132.5 | 250.8 |
| 3 | 35 | 600 | 493.4 | 148.6 | 730.6 | −50.9 | 780.9 |
| 2 | 30 | 400 | 497.2 | 99.75 | 489.6 | 356 | 133.6 |
| 1 | 25 | 200 | 495.9 | 49.67 | 245.9 | −245.9 | 300.4 |
| Fault Type | Fault Point | No Controller | Predictor Method | 1-Input Fuzzy | 1-Input Fuzzy + 900 Ms Delay |
|---|---|---|---|---|---|
| A | 0.2201 | 0.1975 | 0.1797 | 0.1904 | |
| 3 LG | B | 0.2035 | 0.1932 | 0.1772 | 0.1892 |
| Term | C | 0.2201 | 0.1961 | 0.1798 | 0.1905 |
| Delay Value | Fault Type | Fault Point | Voltage Indices at PCC | ||
|---|---|---|---|---|---|
| No Compensation | Predictor Method | Fuzzy Method | |||
| 900 ms | A | 0.2201 | 0.1967 | 0.1797 | |
| 3LG | B | 0.2035 | 0.1942 | 0.1772 | |
| Temp | C | 0.2201 | 0.1968 | 0.1798 | |
| A | 0.1973 | 0.1897 | 0.1727 | ||
| 3LG | B | 0.0521 | 0.0189 | 0.0172 | |
| Perm | C | 0.2088 | 0.1897 | 0.1727 | |
| 700 ms | A | 0.2265 | 0.1990 | 0.1823 | |
| 3LG | B | 0.2079 | 0.1943 | 0.1773 | |
| Temp | C | 0.2265 | 0.1991 | 0.1741 | |
| A | 0.1975 | 0.1911 | 0.1741 | ||
| 3LG | B | 0.0660 | 0.0169 | 0.0132 | |
| Perm | C | 0.1975 | 0.1911 | 0.1741 | |
| 500 ms | A | 0.2085 | 0.1975 | 0.1805 | |
| 3LG | B | 0.2072 | 0.1932 | 0.1762 | |
| Temp | C | 0.2213 | 0.1961 | 0.1791 | |
| A | 0.1885 | 0.1881 | 0.1711 | ||
| 3LG | B | 0.0848 | 0.0218 | 0.0048 | |
| Perm | C | 0.1885 | 0.1463 | 0.1293 | |
| 300 ms | A | 0.2105 | 0.1984 | 0.1804 | |
| 3LG | B | 0.2060 | 0.1927 | 0.1747 | |
| Temp | C | 0.2168 | 0.1948 | 0.1768 | |
| A | 0.1960 | 0.1897 | 0.1717 | ||
| 3LG | B | 0.0715 | 0.0482 | 0.3213 | |
| Perm | C | 0.1995 | 0.1866 | 0.1656 | |
| 100 ms | A | 0.2030 | 0.1947 | 0.1767 | |
| 3LG | B | 0.2019 | 0.1889 | 0.1720 | |
| Temp | C | 0.2140 | 0.1920 | 0.1742 | |
| A | 0.1857 | 0.1766 | 0.1596 | ||
| 3LG | B | 0.1117 | 0.0566 | 0.0405 | |
| Perm | C | 0.1664 | 0.1489 | 0.1472 | |
| Delay Value | Fault Type | Fault Point | Voltage Indices at PCC | ||
|---|---|---|---|---|---|
| No Compensation | Predictor Method | Fuzzy Method | |||
| 900 ms | A | 0.2128 | 0.1898 | 0.1698 | |
| 3LG | B | 0.2055 | 0.1966 | 0.1776 | |
| Temp | C | 0.2128 | 0.1976 | 0.1776 | |
| A | 0.1090 | 0.1060 | 0.0789 | ||
| 3LG | B | 0.1651 | 0.1551 | 0.1351 | |
| Perm | C | 0.1828 | 0.1091 | 0.0891 | |
| 700 ms | A | 0.2126 | 0.2084 | 0.1894 | |
| 3LG | B | 0.2043 | 0.1978 | 0.1778 | |
| Temp | C | 0.2265 | 0.1992 | 0.1802 | |
| A | 0.1059 | 0.1093 | 0,0893 | ||
| 3LG | B | 0.1659 | 0.1560 | 0.1352 | |
| Perm | C | 0.1827 | 0.1093 | 0,0893 | |
| 500 ms | A | 0.2128 | 0.2097 | 0.1897 | |
| 3LG | B | 0.2044 | 0.2004 | 0.1814 | |
| Temp | C | 0.2128 | 0.2035 | 0.1845 | |
| A | 0.1061 | 0.1095 | 0.0895 | ||
| 3LG | B | 0.1669 | 0.1406 | 0.1216 | |
| Perm | C | 0.1819 | 0.1095 | 0.0895 | |
| 300 ms | A | 0.2032 | 0.2059 | 0.1876 | |
| 3LG | B | 0.2042 | 0.2053 | 0.1844 | |
| Temp | C | 0.2085 | 0.2056 | 0.1846 | |
| A | 0.1059 | 0.1091 | 0.0891 | ||
| 3LG | B | 0.1655 | 0.1594 | 0.1384 | |
| Perm | C | 0.1678 | 0.1095 | 0.0895 | |
| 100 ms | A | 0.2089 | 0.2090 | 0.1872 | |
| 3LG | B | 0.2110 | 0.2066 | 0.1756 | |
| Temp | C | 0.2135 | 0.2080 | 0.1915 | |
| A | 0.1062 | 0.1094 | 0.0894 | ||
| 3LG | B | 0.1664 | 0.1597 | 0.1297 | |
| Perm | C | 0.0111 | 0.0109 | 0.0074 | |
| Delay Value | Fault Type | Fault Point | Voltage Indices at PCC | ||
|---|---|---|---|---|---|
| No Compensation | Predictor Method | Fuzzy Method | |||
| 900 ms | A | 1.5086 | 1.2950 | 1.2587 | |
| 3LG | B | 1.6314 | 1.6116 | 1.5076 | |
| Temp | C | 1.5012 | 1.2954 | 1.2591 | |
| A | 3.0263 | 2.1098 | 1.8618 | ||
| 3LG | B | 1.6136 | 1.0170 | 1.0043 | |
| Perm | C | 3.0570 | 2.3504 | 2.1024 | |
| 700 ms | A | 1.5991 | 1.3768 | 1.3405 | |
| 3LG | B | 1.5934 | 1.2957 | 1.2594 | |
| Temp | C | 1.5856 | 1.2186 | 1.1823 | |
| A | 5.9040 | 4.3510 | 3.6399 | ||
| 3LG | B | 4.8460 | 1.6722 | 1.5682 | |
| Perm | C | 5.9040 | 1.4579 | 1.3559 | |
| 500 ms | A | 0.7082 | 0.2515 | 0.3256 | |
| 3LG | B | 1.4309 | 0.2999 | 0.3412 | |
| Temp | C | 1.2684 | 0.2515 | 0.3256 | |
| A | 8.4230 | 5.8590 | 5.3300 | ||
| 3LG | B | 3.3157 | 2.1337 | 1.8857 | |
| Perm | C | 8.7550 | 5.9864 | 5.4574 | |
| 300 ms | A | 1.1173 | 0.2832 | 0.3489 | |
| 3LG | B | 1.2487 | 0.6805 | 0.7429 | |
| Temp | C | 1.2663 | 0.2145 | 0.3045 | |
| A | 6.3820 | 4.5632 | 4.3752 | ||
| 3LG | B | 3.9496 | 2.1593 | 1.9713 | |
| Perm | C | 5.5660 | 3.8029 | 3.1509 | |
| 100 ms | A | 1.0109 | 0.3693 | 0.3861 | |
| 3LG | B | 1.2750 | 0.3627 | 0.3854 | |
| Temp | C | 1.2105 | 0.2981 | 0.3124 | |
| A | 5.3580 | 4.6171 | 4.1621 | ||
| 3LG | B | 3.5670 | 3.1431 | 2.4911 | |
| Perm | C | 3.3347 | 3.0456 | 2.9016 | |
| Approach’s | Advantages | Disadvantages |
|---|---|---|
| Fuzzy Logic Control Method |
|
|
| Modified Predictor Method |
|
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muyizere, D.; Letting, L.K.; Munyazikwiye, B.B. Decreasing the Negative Impact of Time Delays on Electricity Due to Performance Improvement in the Rwanda National Grid. Electronics 2022, 11, 3114. https://doi.org/10.3390/electronics11193114
Muyizere D, Letting LK, Munyazikwiye BB. Decreasing the Negative Impact of Time Delays on Electricity Due to Performance Improvement in the Rwanda National Grid. Electronics. 2022; 11(19):3114. https://doi.org/10.3390/electronics11193114
Chicago/Turabian StyleMuyizere, Darius, Lawrence K. Letting, and Bernard B. Munyazikwiye. 2022. "Decreasing the Negative Impact of Time Delays on Electricity Due to Performance Improvement in the Rwanda National Grid" Electronics 11, no. 19: 3114. https://doi.org/10.3390/electronics11193114
APA StyleMuyizere, D., Letting, L. K., & Munyazikwiye, B. B. (2022). Decreasing the Negative Impact of Time Delays on Electricity Due to Performance Improvement in the Rwanda National Grid. Electronics, 11(19), 3114. https://doi.org/10.3390/electronics11193114