
Supervisor Design for a Pressurized Reactor Unit in the Presence of Sensor and Actuator Faults



Abstract
:1. Introduction
2. General Notation and Notions
3. Modeling of the Pressurized Reactor Unit
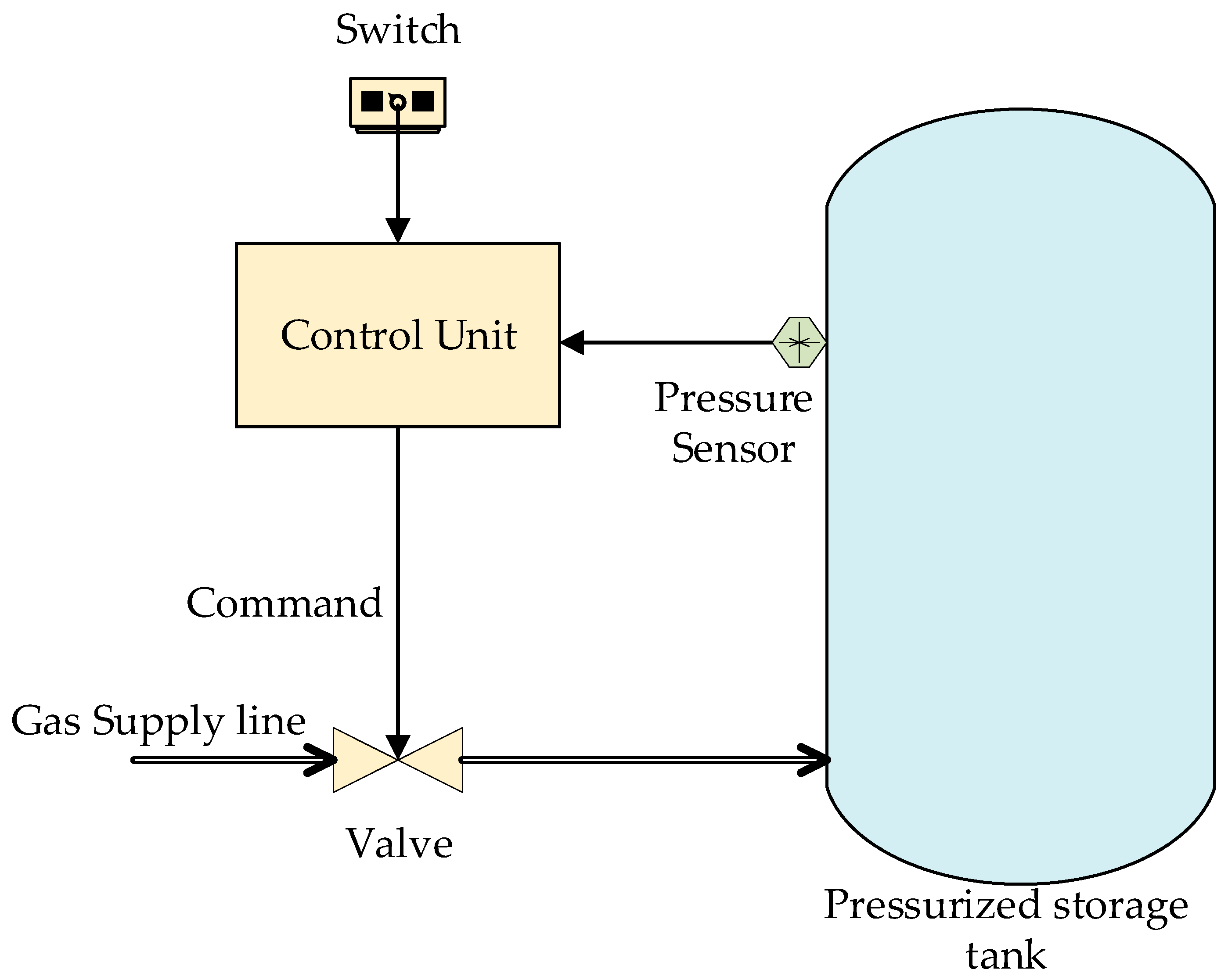
3.1. Description of the Unit
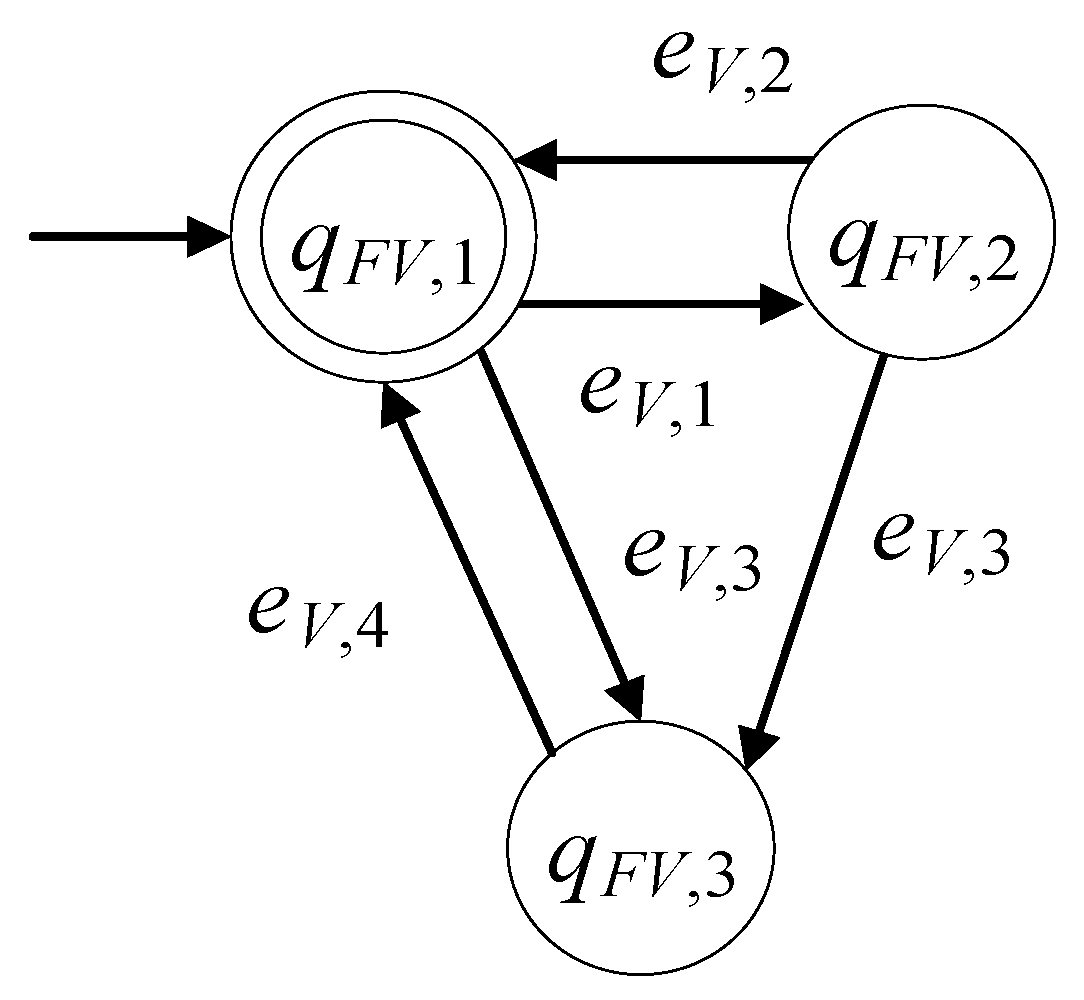
3.2. The Model of the Valve including Faults
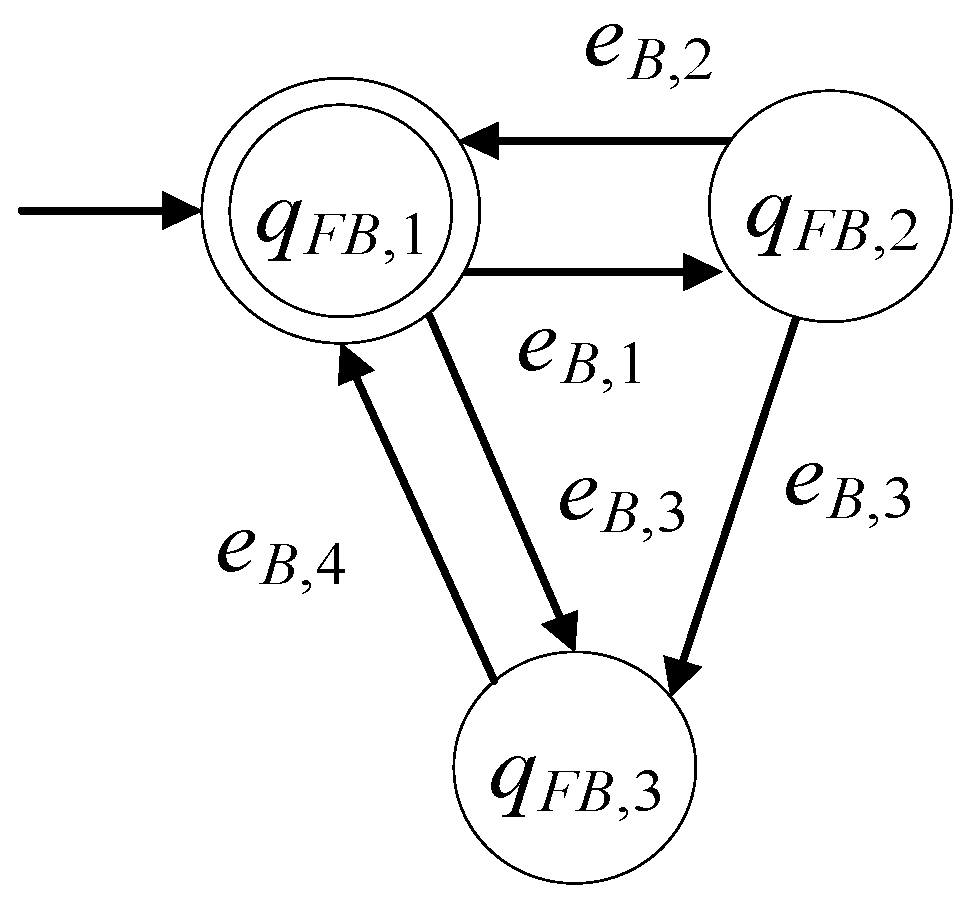
3.3. The Model of the Switch in the Presence of Faults
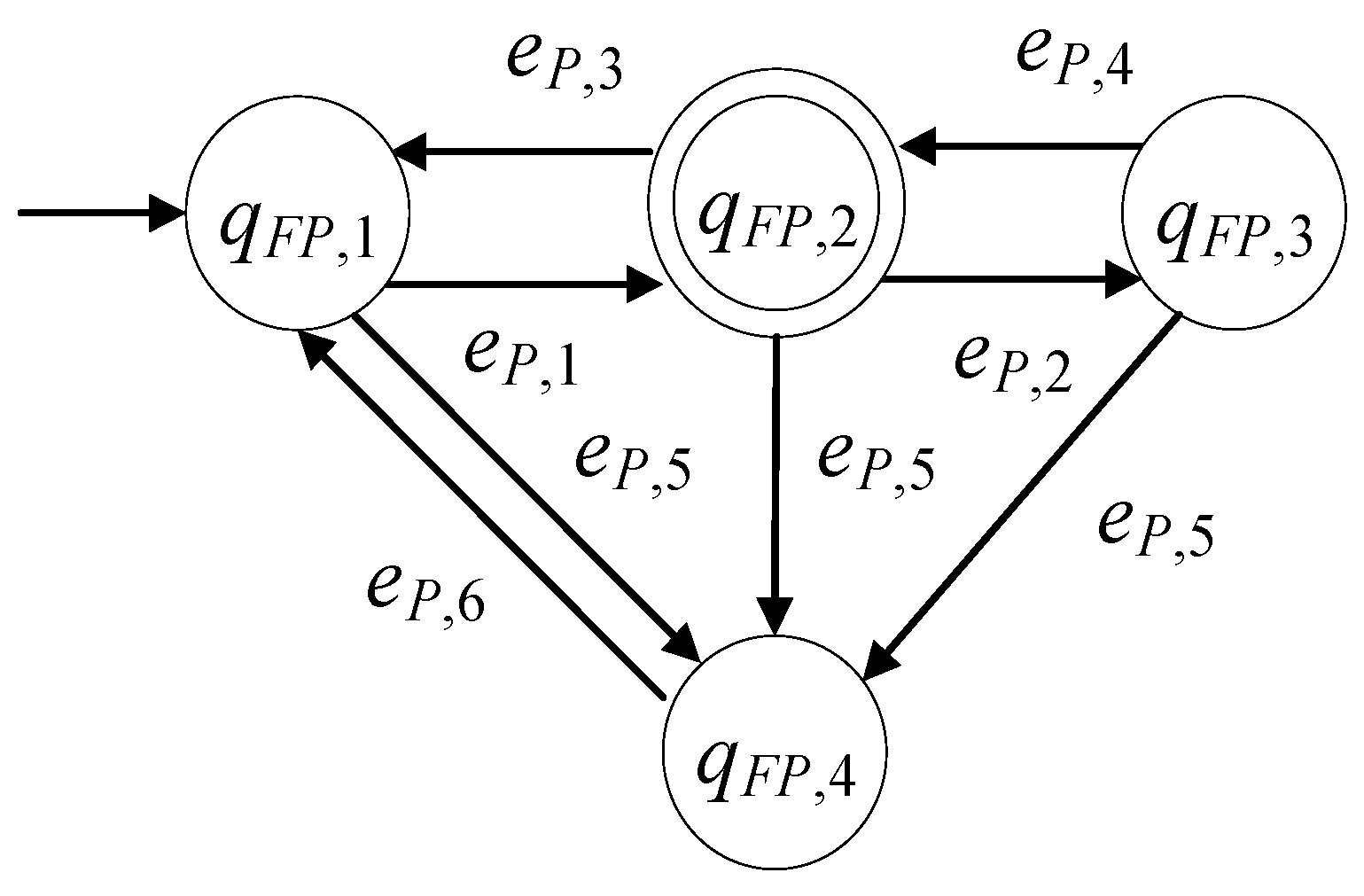
3.4. The Model of the Pressure Sensor in the Presence of Faults
3.5. The Total Automaton
4. Desired Behavior
- When a fault takes place in the total system of the reactor unit, then the command to open the valve is disactivated until the fault repair;
- If the pressure in the reactor is lower than its desired level, then the command to close the valve is disactivated, regardless of the switch command;
- If the pressure in the reactor is higher than its desired level, then the command to open the valve is disactivated, regardless of the switch command;
- The pressurize–depressurize cycle is preserved.
5. Supervisory Control Design
5.1. Realization of Supervisors
5.2. The Performance of the Controlled System
- -
- The uncontrollable events and for ;
- -
- The uncontrollable events , , and for ;
- -
- The uncontrollable events , and for ;
- -
- The uncontrollable events , , , and for .
6. Supervisor Implementation
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rotstein, G.E.; Lavie, R.; Lewin, D.R. Automatic Synthesis of Batch Plant Procedures. A Process-Oriented Approach. AIChE J. 1994, 40, 1650–1664. [Google Scholar] [CrossRef]
- Koumboulis, F.N.; King, R.E.; Stathaki, A. Logic-Based Switching Controllers—A stepwise safe switching approach. Inf. Sci. 2007, 177, 2736–2755. [Google Scholar] [CrossRef]
- Sanchez, A.; Rotstein, G.; Alsop, N.; Macchietto, S. Synthesis and implementation of procedural controllers for event-driven operations. AIChE J. 1999, 45, 1753–1775. [Google Scholar] [CrossRef]
- Sanchez, A.; Douriet, J.G.; Ramirez, E. Synthesis of a Class of Discrete-Event Controllers for Large Manufacturing Systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 662–669. [Google Scholar] [CrossRef]
- Dimitriadis, V.D.; Shah, N.; Pantelides, C.C. Modeling and safety verification of discrete/continuous processing systems. AIChE J. 1997, 43, 1041–1059. [Google Scholar] [CrossRef]
- Sanchez, A.; Douriet, J. Efficient Synthesis of a Class of Discrete-Event Controllers for Forced Actions. IFAC Proc. Vol. 2004, 37, 265–270. [Google Scholar] [CrossRef]
- Wonham, W.M.; Kai, C. Supervisory Control of Discrete-Event Systems; Springer: Cham, Switzerland, 2019. [Google Scholar] [CrossRef]
- Cassandras, C.G.; Lafortune, S. Introduction to Discrete Event Systems, 2nd ed.; Springer: New York, NY, USA, 2008. [Google Scholar] [CrossRef]
- Lu, X.; Piétrac, L.; Niel, E. A new approach of modeling supervisory control for manufacturing systems based on SysML. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017. [Google Scholar]
- Vieira, A.D.; Santos, E.A.P.; de Queiroz, M.H.; Leal, A.B.; Neto, A.D.D.P.; Cury, J.E.R. A Method for PLC Implementation of Supervisory Control of Discrete Event Systems. IEEE Trans. Control Syst. Technol. 2016, 25, 175–191. [Google Scholar] [CrossRef]
- Queiroz, M.H.; Cury, J.E.R. Synthesis and implementation of local modular supervisory control for a manufacturing cell. In Proceeding of the IFAC 6th International Workshop in Discrete Event System, Zaragoza, Spain, 4 October 2002. [Google Scholar]
- Morgenstern, A.; Schneider, K. Using Model Checking to Solve Supervisor Synthesis Problems. In Proceedings of the 44th IEEE Conference on Decision and Control, Seville, Spain, 15 December 2005; pp. 2757–2762. [Google Scholar]
- Göbe, F.; Ney, O.; Kowalewski, S. Reusability and modularity of safety specifications for supervisory control. In Proceedings of the 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA), Berlin, Germany, 6–9 September 2016; pp. 1–8. [Google Scholar]
- Göbe, F.; Aydin, S.; Kowalewski, S. Applicability of supervisory control theory for the supervision of PLC programs. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–8. [Google Scholar]
- Sampath, M.; Sengupta, R.; LaFortune, S.; Sinnamohideen, K.; Teneketzis, D.C. Failure diagnosis using discrete event models. IEEE Trans. Control Syst. Technol. 1996, 4, 105–124. [Google Scholar] [CrossRef]
- Wen, Q.; Kumar, R.; Huang, J.; Liu, H. A Framework for Fault-Tolerant Control of Discrete Event Systems. IEEE Trans. Autom. Control 2008, 53, 1839–1849. [Google Scholar] [CrossRef]
- Su, R. Supervisor synthesis to thwart cyber attack with bounded sensor reading alterations. Automatica 2018, 94, 35–44. [Google Scholar] [CrossRef]
- Gao, C.; Seatzu, C.; Li, Z.; Giua, A. Multiple Attacks Detection on Discrete Event Systems. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019. [Google Scholar] [CrossRef]
- Thramboulidis, K. IEC 61499 in Factory Automation. In Advances in Computer, Information, and Systems Sciences, and Engineering; Springer: Dordrecht, The Netherlands, 2006. [Google Scholar] [CrossRef]
- Pinto, L.I.; Leal, A.B.; Rosso, R.S.U. Safe dynamic reconfiguration through supervisory control in IEC 61499 com-pliant systems. In Proceedings of the 2017 IEEE 15th International Conference on Industrial Informatics (INDIN), Emden, Germany, 24–26 July 2017; pp. 753–758. [Google Scholar]
- Leitão, H.A.S.; Rosso, R.S.U.; Leal, A.B.; Zoitl, A. Fault Handling in Discrete Event Systems Applied to IEC 61499. In Proceedings of the 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vienna, Austria, 8–11 September 2020. [Google Scholar]
- Cengic, G.; Akesson, K.; Lennartson, B.; Yuan, C.; Ferreira, P. Implementation of full synchronous composition using IEC 61499 function blocks. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Edmonton, AB, Canada, 1–2 August 2005; pp. 267–272. [Google Scholar] [CrossRef]
- Akesson, K.; Fabian, M.; Flordal, H.; Malik, R. Supremica—An integrated environment for verification, synthesis and simulation of discrete event systems. In Proceedings of the 2006 8th International Workshop on Discrete Event Systems, Ann Arbor, MI, USA, 10–12 July 2006; pp. 384–385. [Google Scholar]
- Cengic, G.; Ljungkrantz, O.; Akesson, K. Formal Modeling of Function Block Applications Running in IEC 61499 Execution Runtime. In Proceedings of the 2006 IEEE Conference on Emerging Technologies and Factory Automation, Prague, Czech, 20–22 September 2006; pp. 1269–1276. [Google Scholar] [CrossRef]
- Koumboulis, F.N.; Fragkoulis, D.G.; Menexis, A.N. Supervisory control for flexibility of production manufacturing processes. In Proceedings of the IEEE 21st International Conference on Intelligent Engineering Systems 2017 (INES 2017), Larnaca, Cyprus, 20–23 October 2017. [Google Scholar]
- Koumboulis, F.N.; Fragkoulis, D.G.; Ioannou, K.A. Control of Router Nodes in Production Manufacturing Processes. In Proceedings of the 2018 7th International Conference on Systems and Control (ICSC), Valencia, Spain, 24–26 October 2018; pp. 372–377. [Google Scholar] [CrossRef]
- Koumboulis, F.N.; Fragkoulis, D.G.; Michalainas, V.C. Modular supervisory control for mining process elevator systems. In Proceedings of the International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 4–6 May 2017. [Google Scholar]
- Koumboulis, F.N.; Fragkoulis, D.G.; Diveris, G.K. Function Supervisors for Storage Systems. In Proceedings of the International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 7–9 May 2018. [Google Scholar]
- Guo, L.; Vincentelli, A.S.; Pinto, A. A complexity metric for concurrent finite state machine based embedded software. In Proceedings of the 8th IEEE International Symposium on Industrial Embedded Systems (SIES), Porto, Portugal, 19–21 June 2013. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event | State of the Total Automaton | Description (Valve, Switch, Sensor) |
|---|---|---|
| (Closed, Off, Low) | ||
| (Closed, On, Low) | ||
| (Opened, On, Low) | ||
| (Opened, On, Medium) | ||
| (Opened, On, High) | ||
| (Closed, On, High) | ||
| (Opened, On, High) | ||
| (Opened, On, Medium) | ||
| (Opened, Off, Medium) | ||
| (Opened, Off, High) | ||
| (Closed, Off, High) | ||
| (Closed, Off, Faulty) | ||
| (Closed, On, Faulty) | ||
| (Opened, On, Faulty) | ||
| (Opened, On, Low) |
| Event | State of the Controlled Automaton | Description (Valve, Switch, Sensor) |
|---|---|---|
| (Closed, Off, Low) | ||
| (Closed, On, Low) | ||
| (Opened, On, Low) | ||
| (Opened, On, Medium) | ||
| (Opened, On, High) | ||
| (Closed, On, High) | ||
| (Closed, On, High) | ||
| (Closed, On, Medium) | ||
| (Closed, Off, Medium) | ||
| (Closed, Off, High) | ||
| (Closed, Off, High) | ||
| (Closed, Off, Faulty) | ||
| (Closed, On, Faulty) | ||
| (Closed, On, Faulty) | ||
| (Closed, On, Low) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koumboulis, F.N.; Fragkoulis, D.G.; Kalkanas, I.; Fragulis, G.F. Supervisor Design for a Pressurized Reactor Unit in the Presence of Sensor and Actuator Faults. Electronics 2022, 11, 2534. https://doi.org/10.3390/electronics11162534
Koumboulis FN, Fragkoulis DG, Kalkanas I, Fragulis GF. Supervisor Design for a Pressurized Reactor Unit in the Presence of Sensor and Actuator Faults. Electronics. 2022; 11(16):2534. https://doi.org/10.3390/electronics11162534
Chicago/Turabian StyleKoumboulis, Fotis N., Dimitrios G. Fragkoulis, Ioannis Kalkanas, and George F. Fragulis. 2022. "Supervisor Design for a Pressurized Reactor Unit in the Presence of Sensor and Actuator Faults" Electronics 11, no. 16: 2534. https://doi.org/10.3390/electronics11162534
APA StyleKoumboulis, F. N., Fragkoulis, D. G., Kalkanas, I., & Fragulis, G. F. (2022). Supervisor Design for a Pressurized Reactor Unit in the Presence of Sensor and Actuator Faults. Electronics, 11(16), 2534. https://doi.org/10.3390/electronics11162534