
Hardware-in-the-Loop Simulations: A Historical Overview of Engineering Challenges




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- Intense pressure to reduce development cycles;
- Safety requirements which require exhaustive testing of a control system before using on the real plant;
- The need to prevent costly failures, either in-service or late in the design cycle;
- Reduced cost and greater availability of off-the-shelf products for HIL simulation.
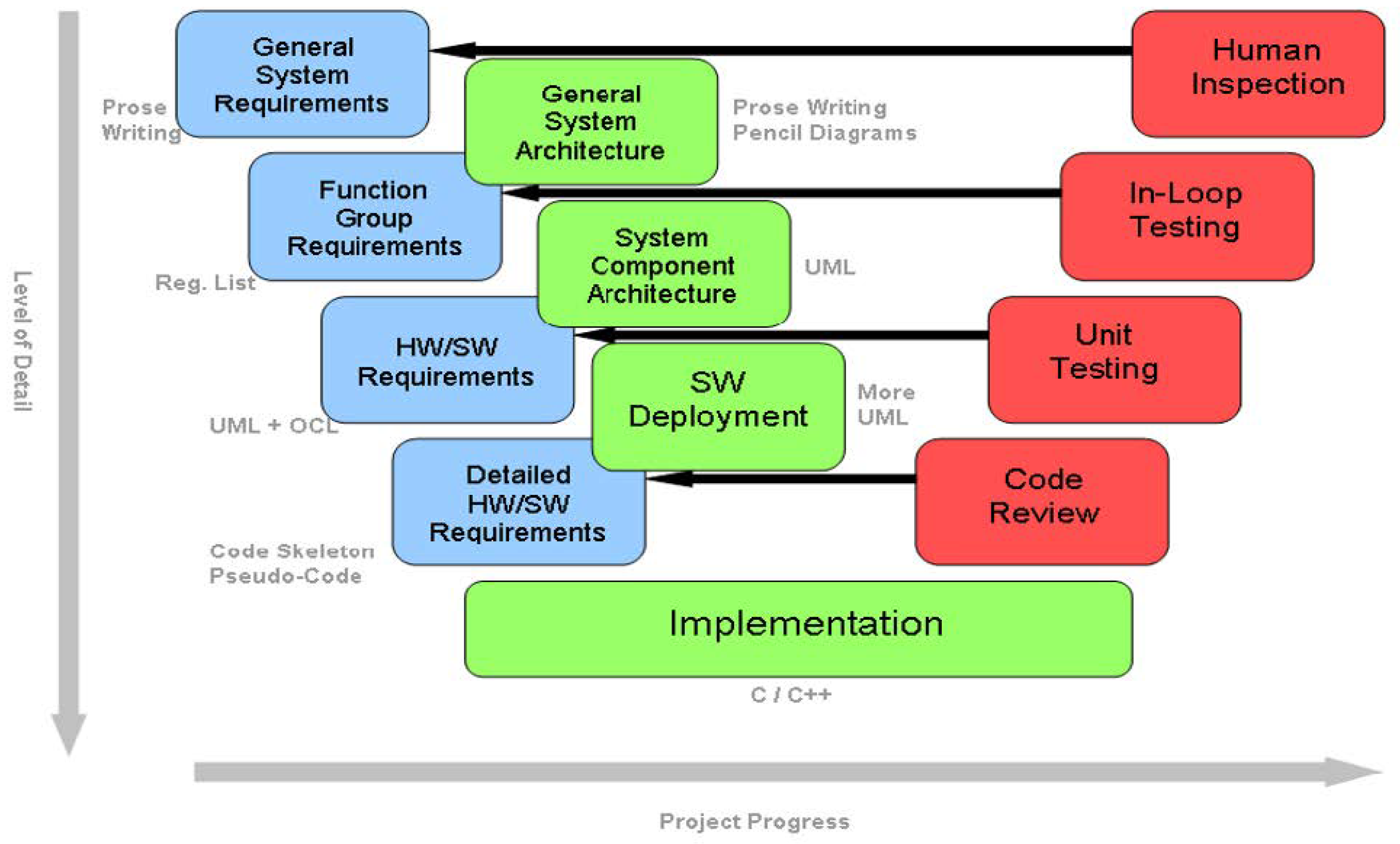
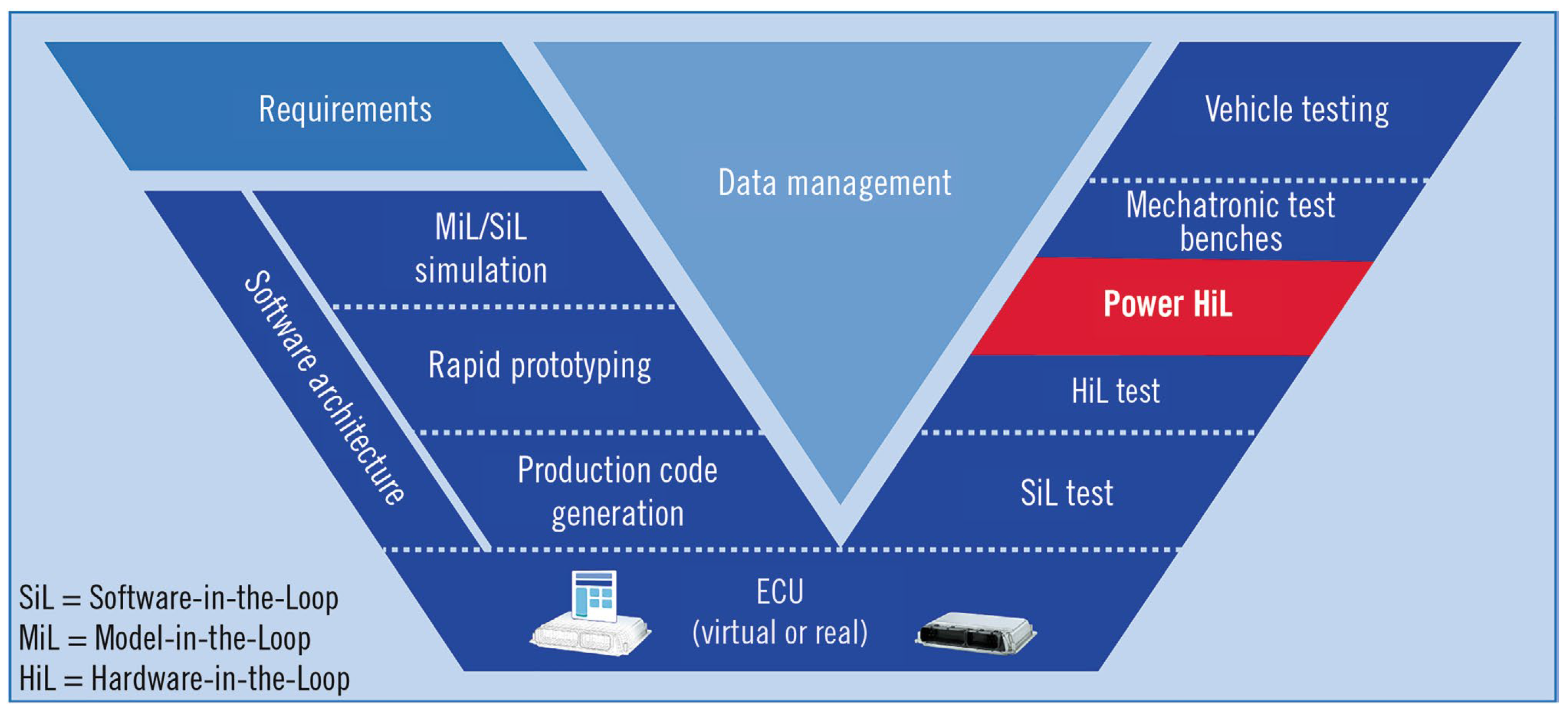
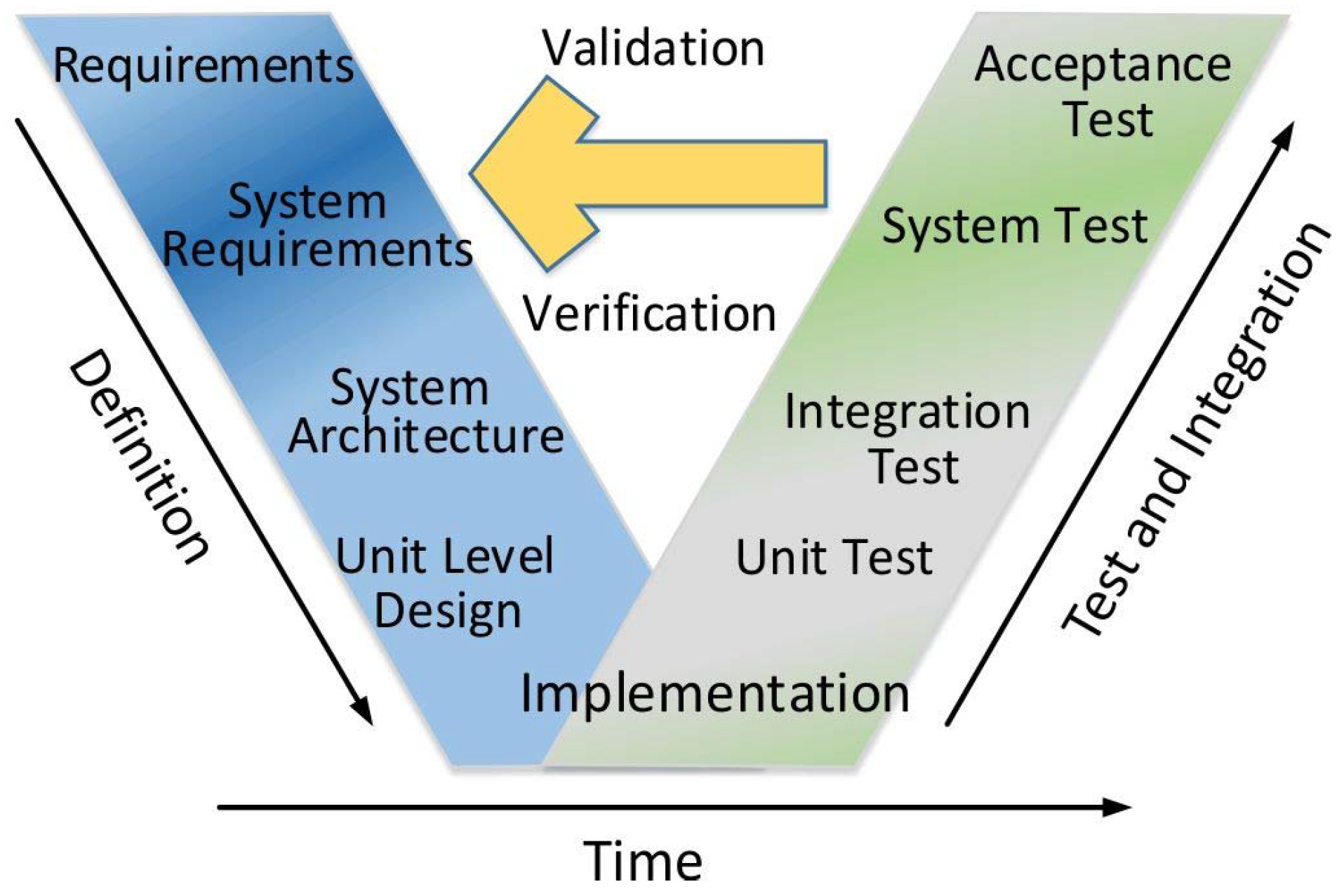
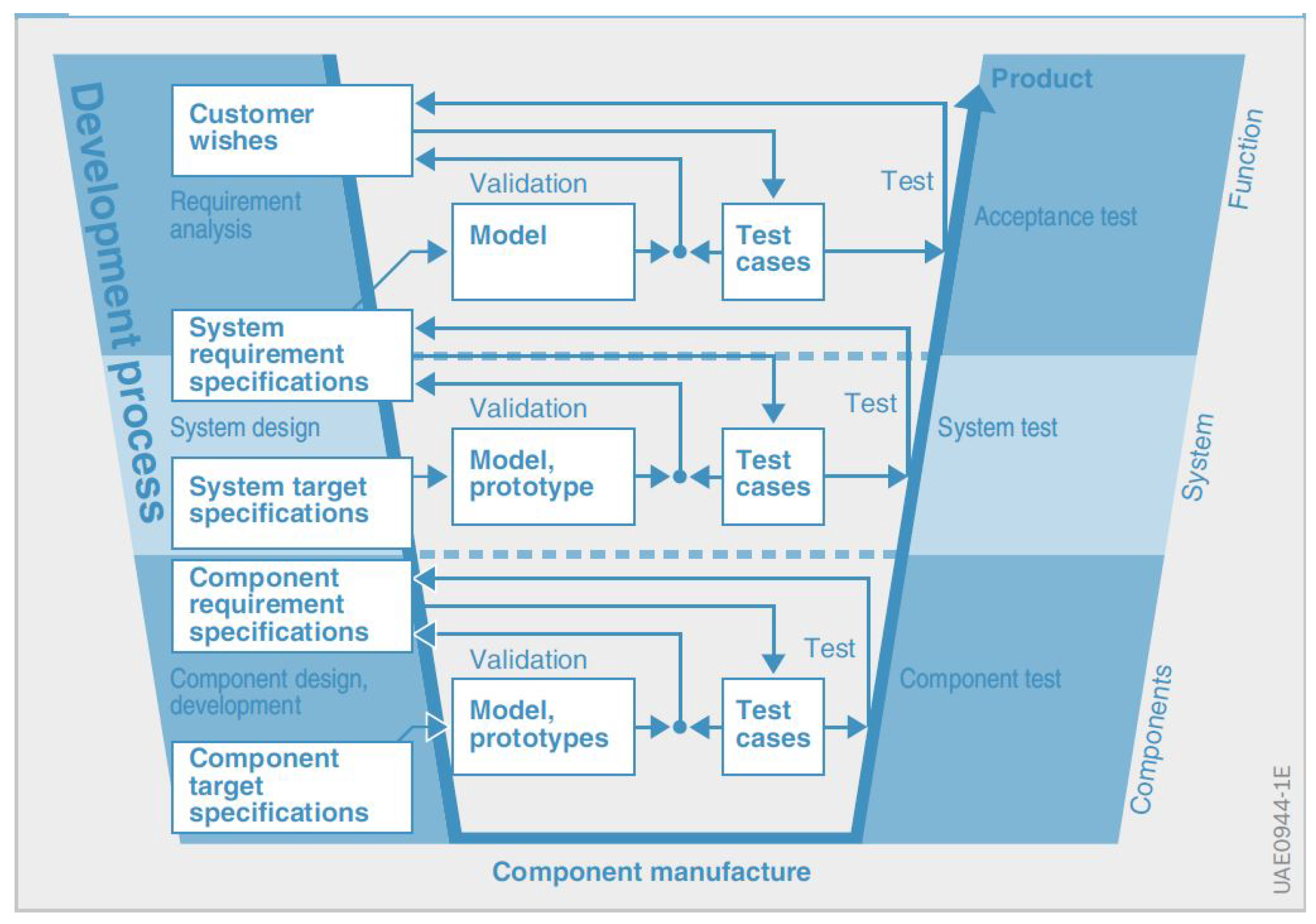
V-Models for the Development Procedures and Functional Safety
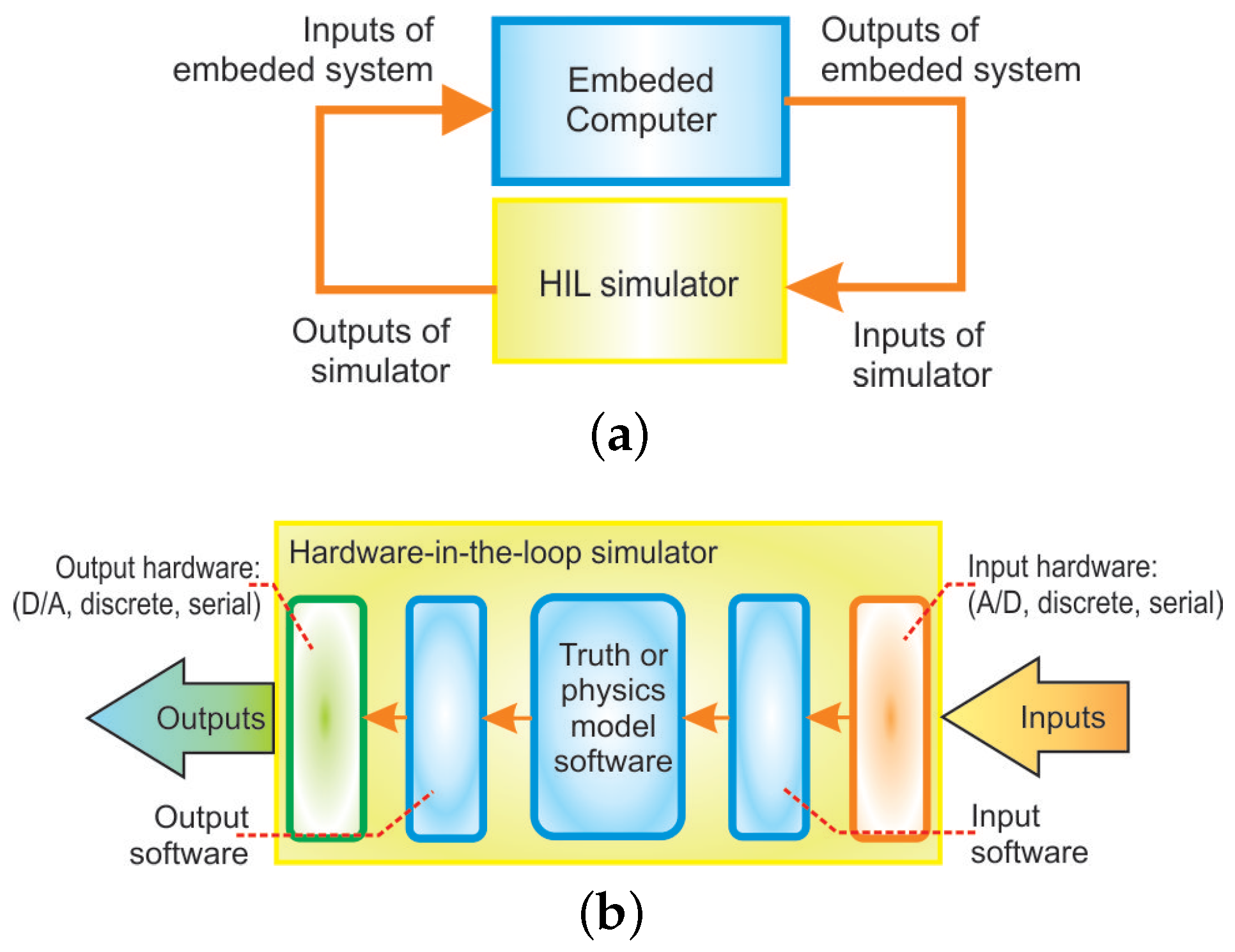
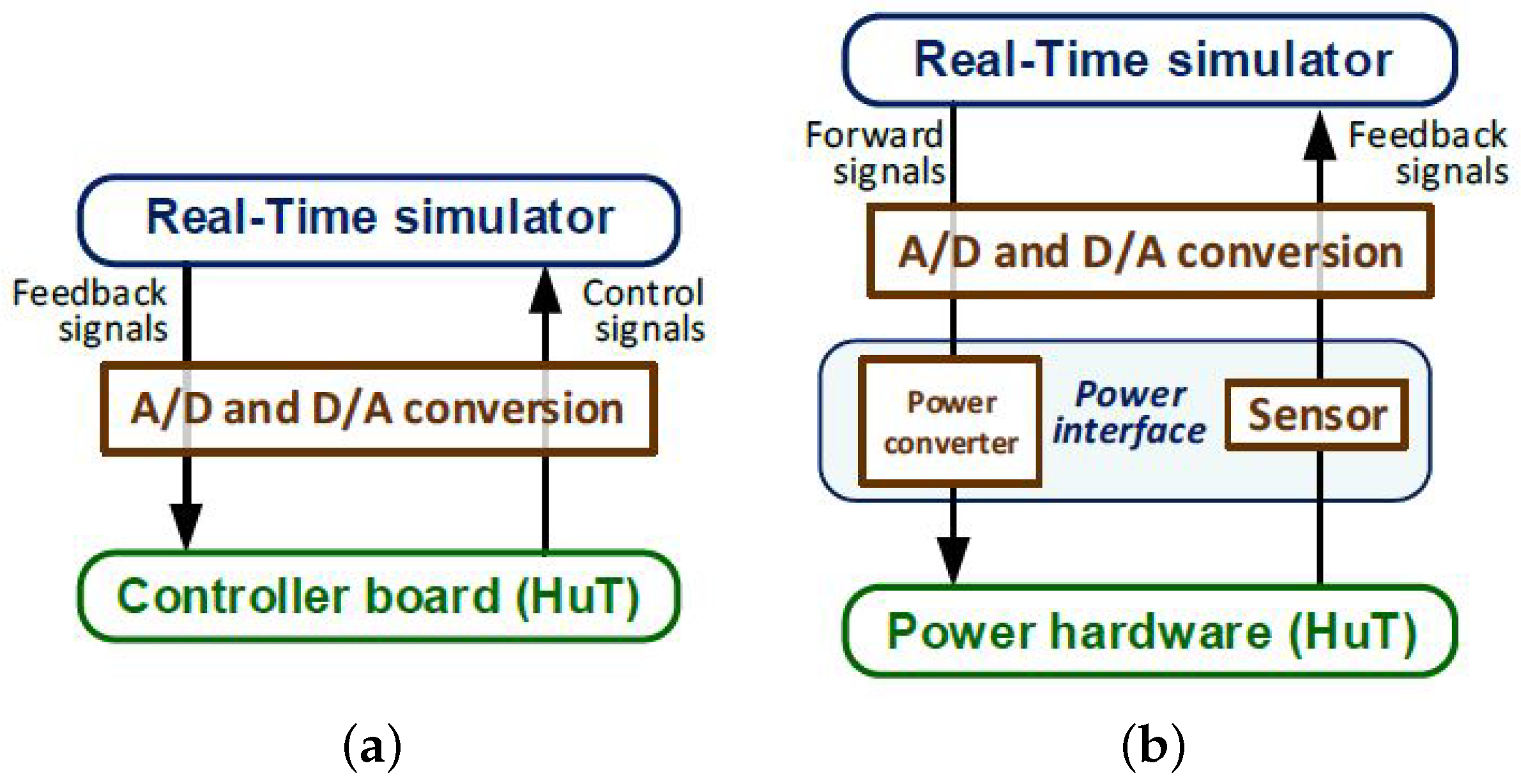
2. Hardware-in-the-Loop Simulation: Principles and Fields of Interest
2.1. HIL Simulation in the Automotive Area
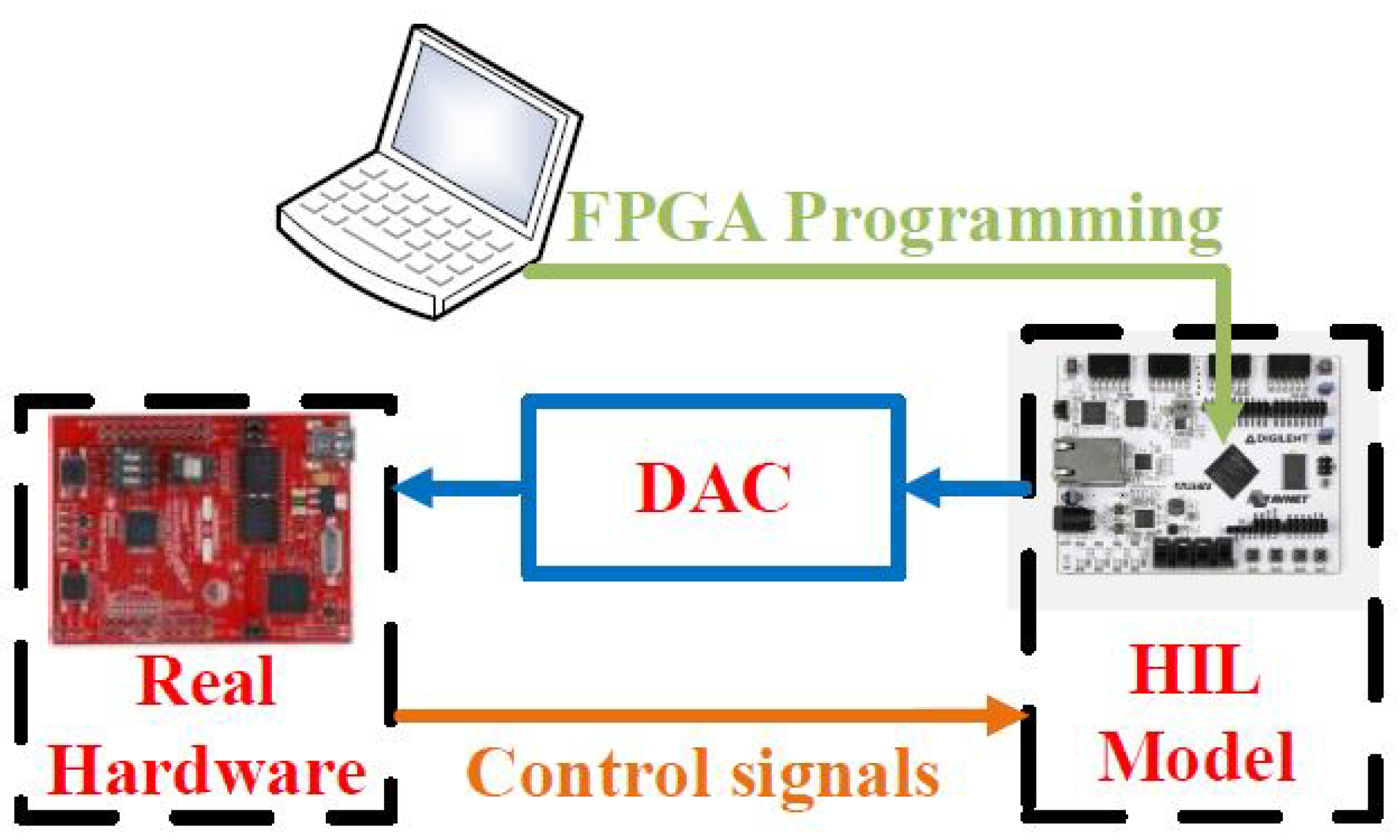
2.1.1. Real-Time HILTesting with FPGA Acceleration
2.1.2. Automotive and HIL Simulation Examples
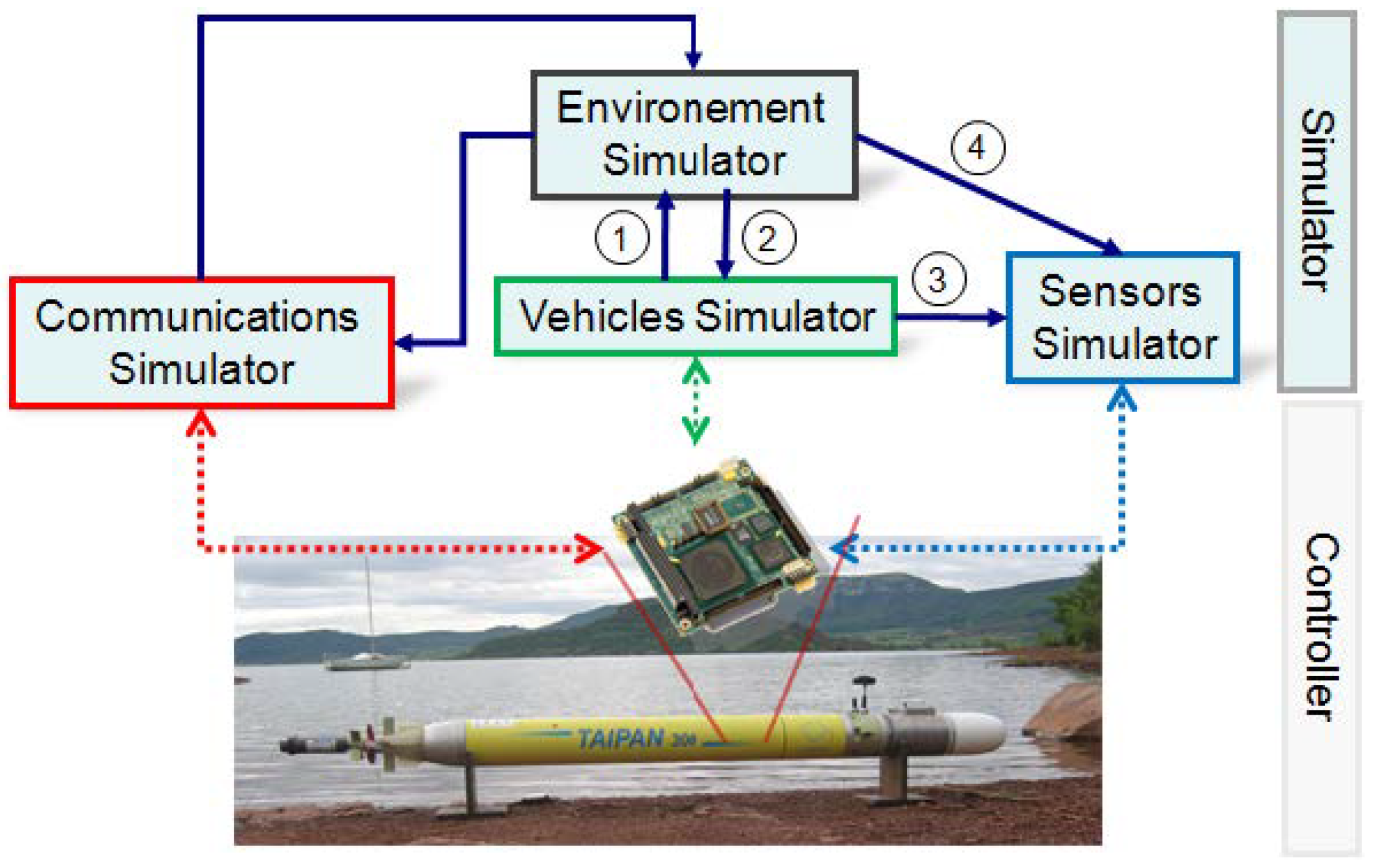
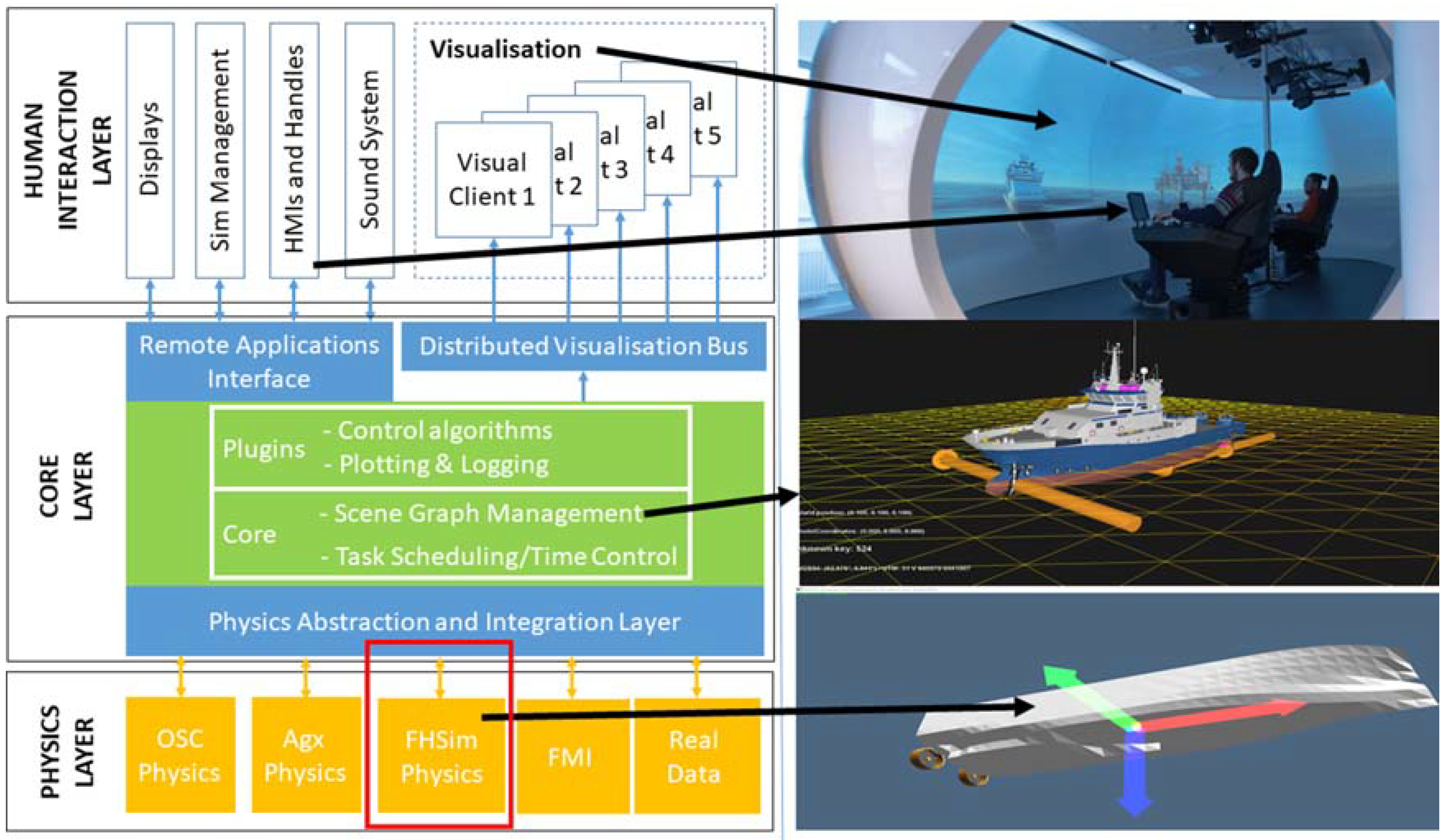
2.1.3. Marine Traffic and HIL Simulation Examples
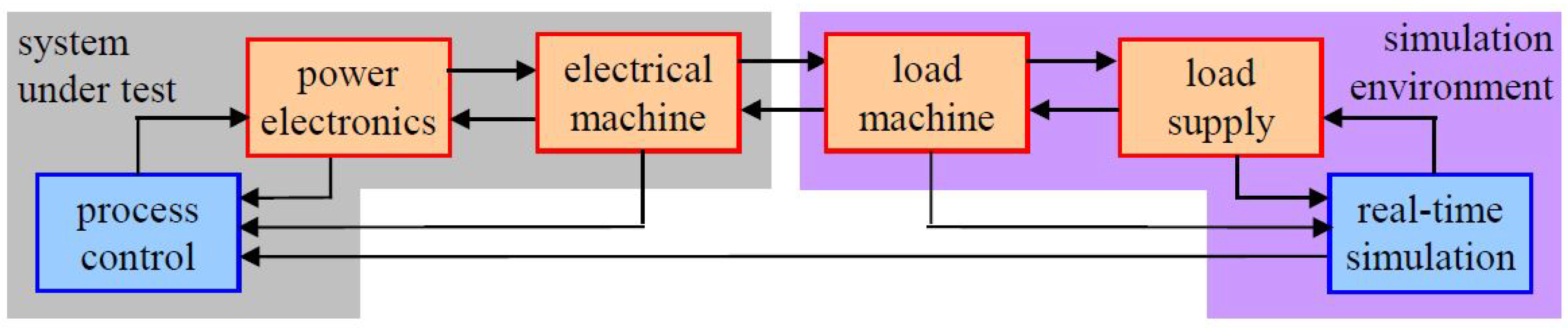
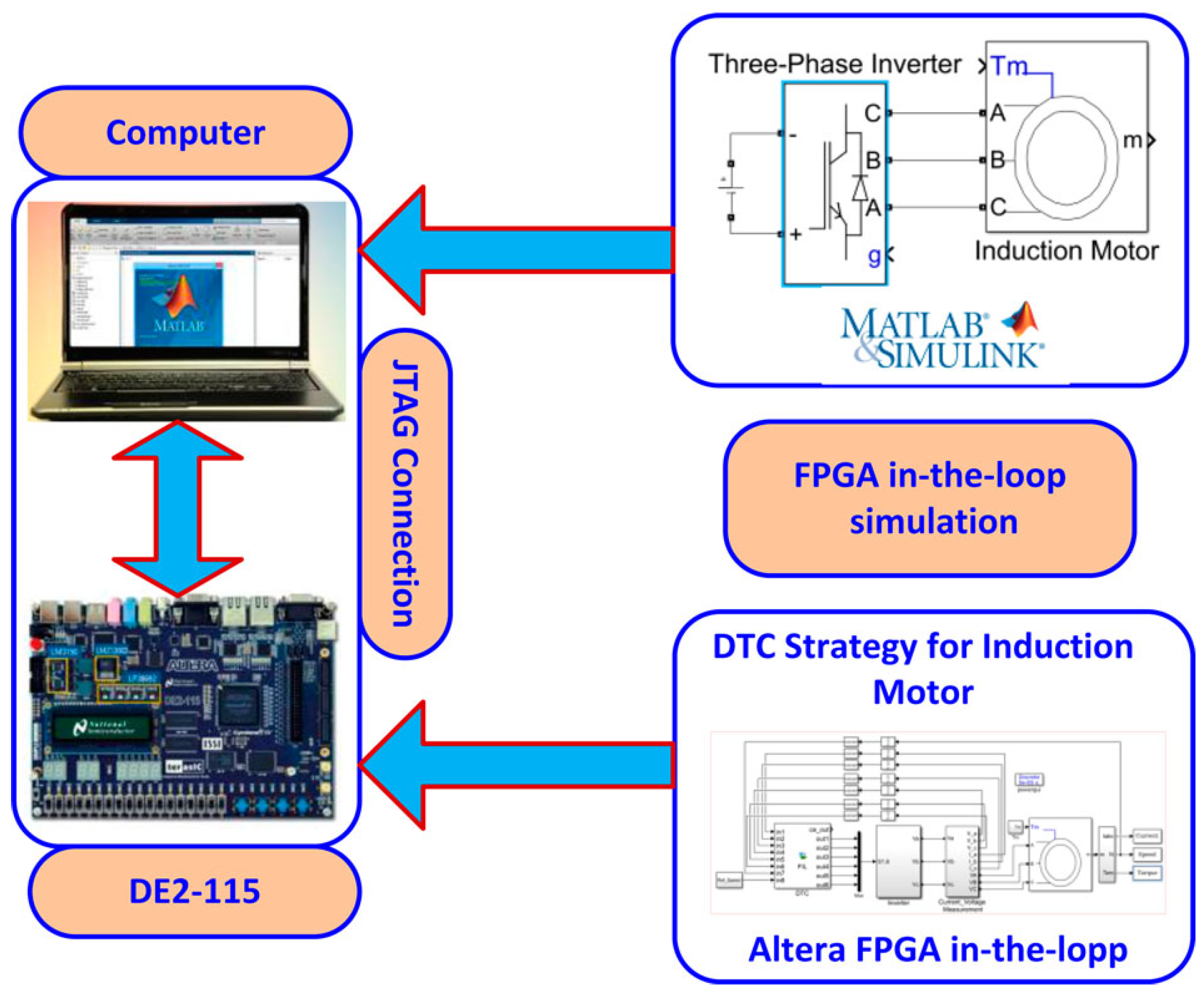
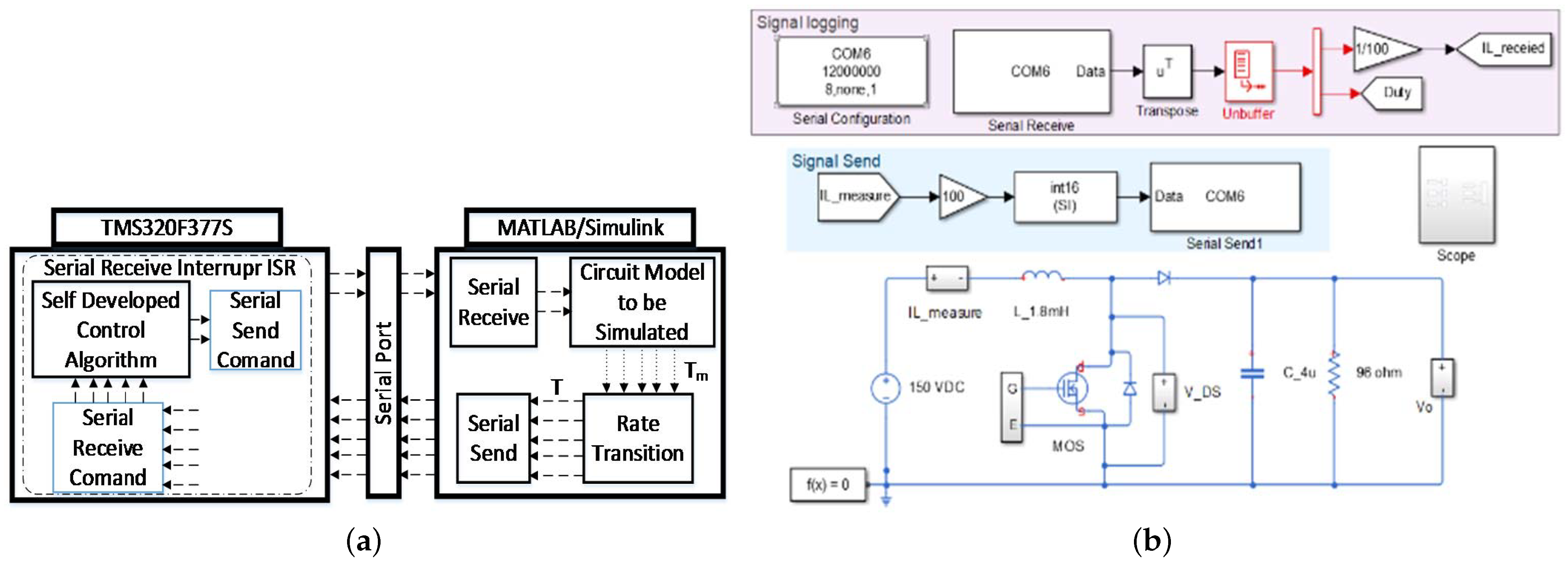
2.2. HIL Simulation in Electric Drives
Electric Drives and HIL Simulation Examples
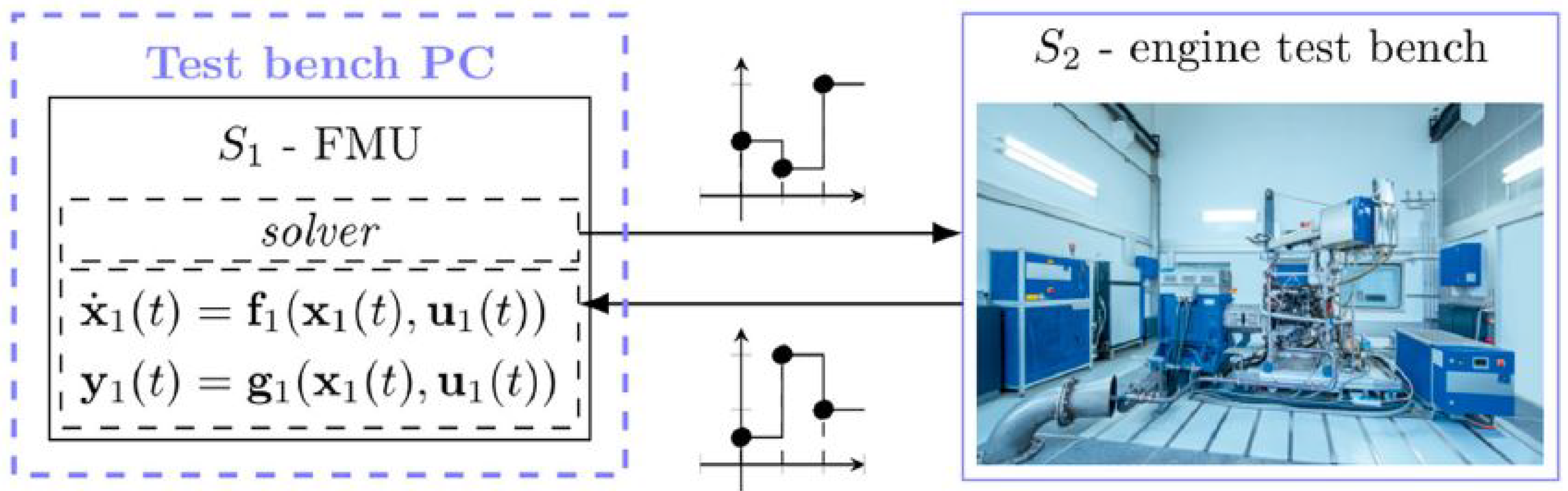
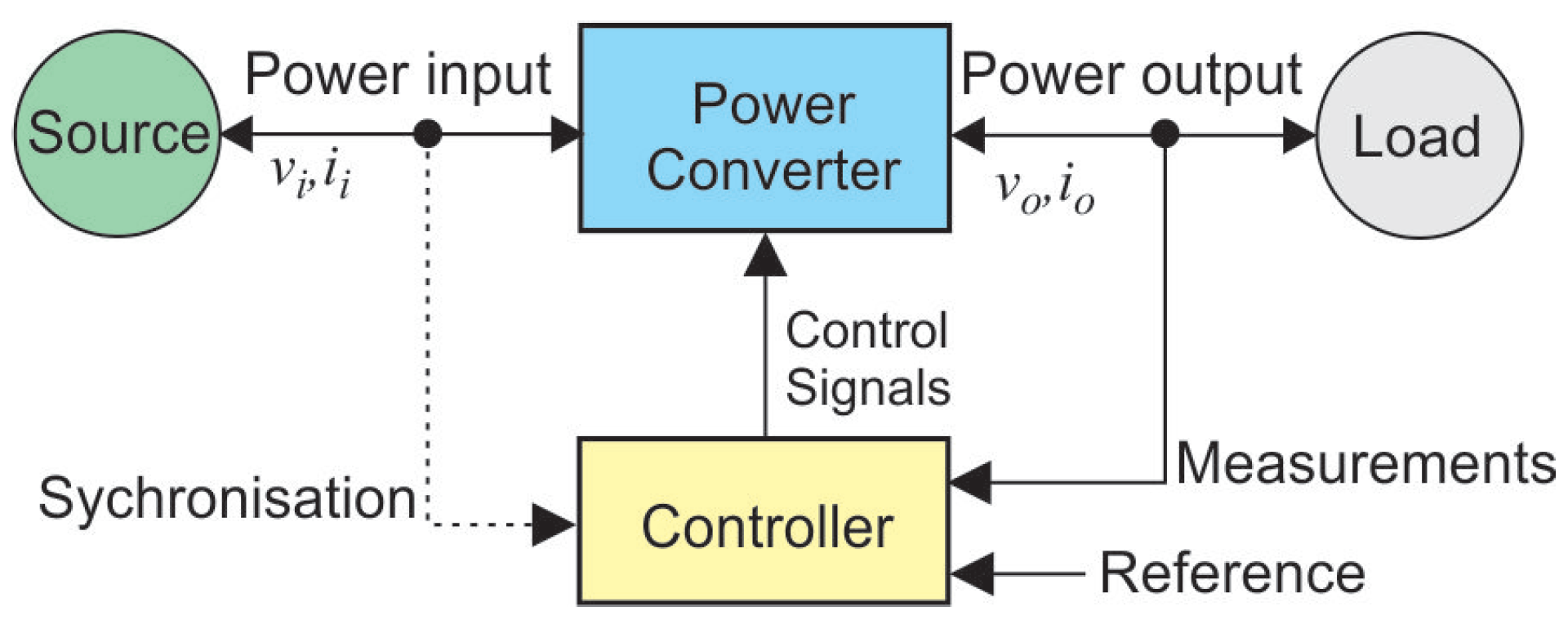
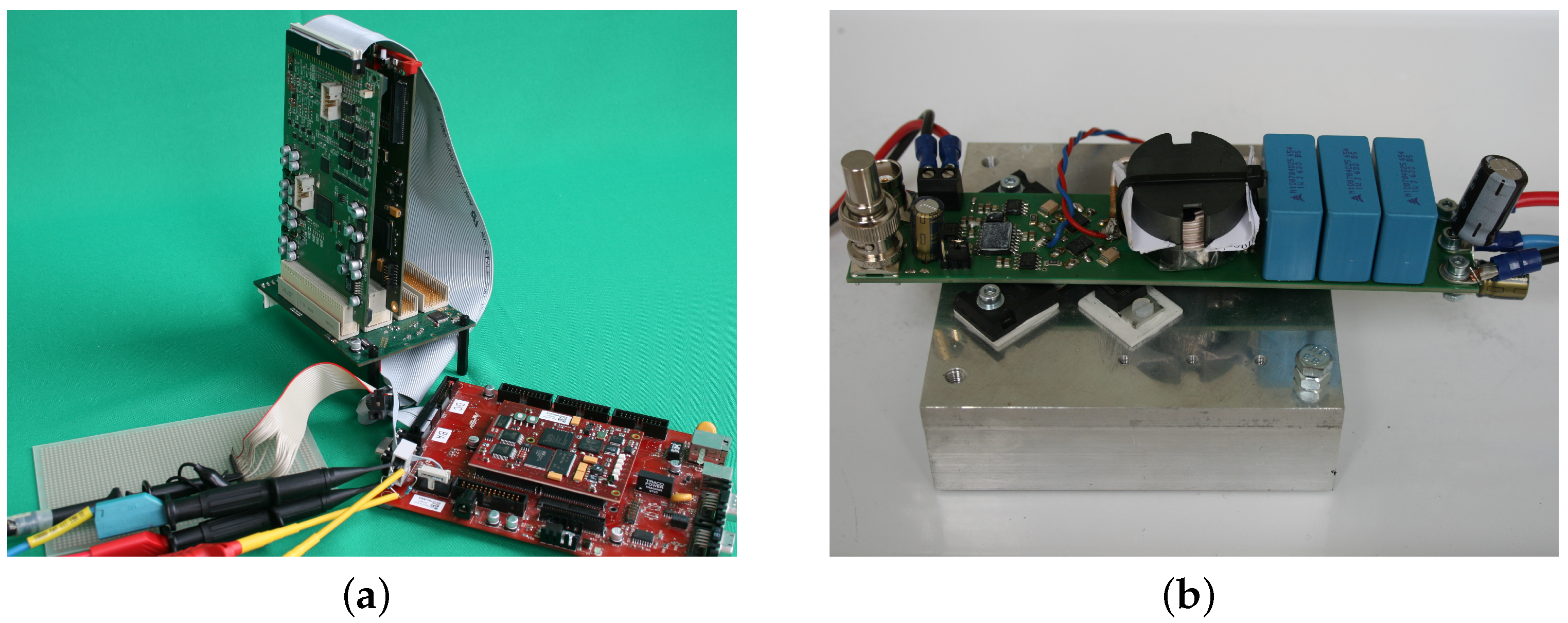
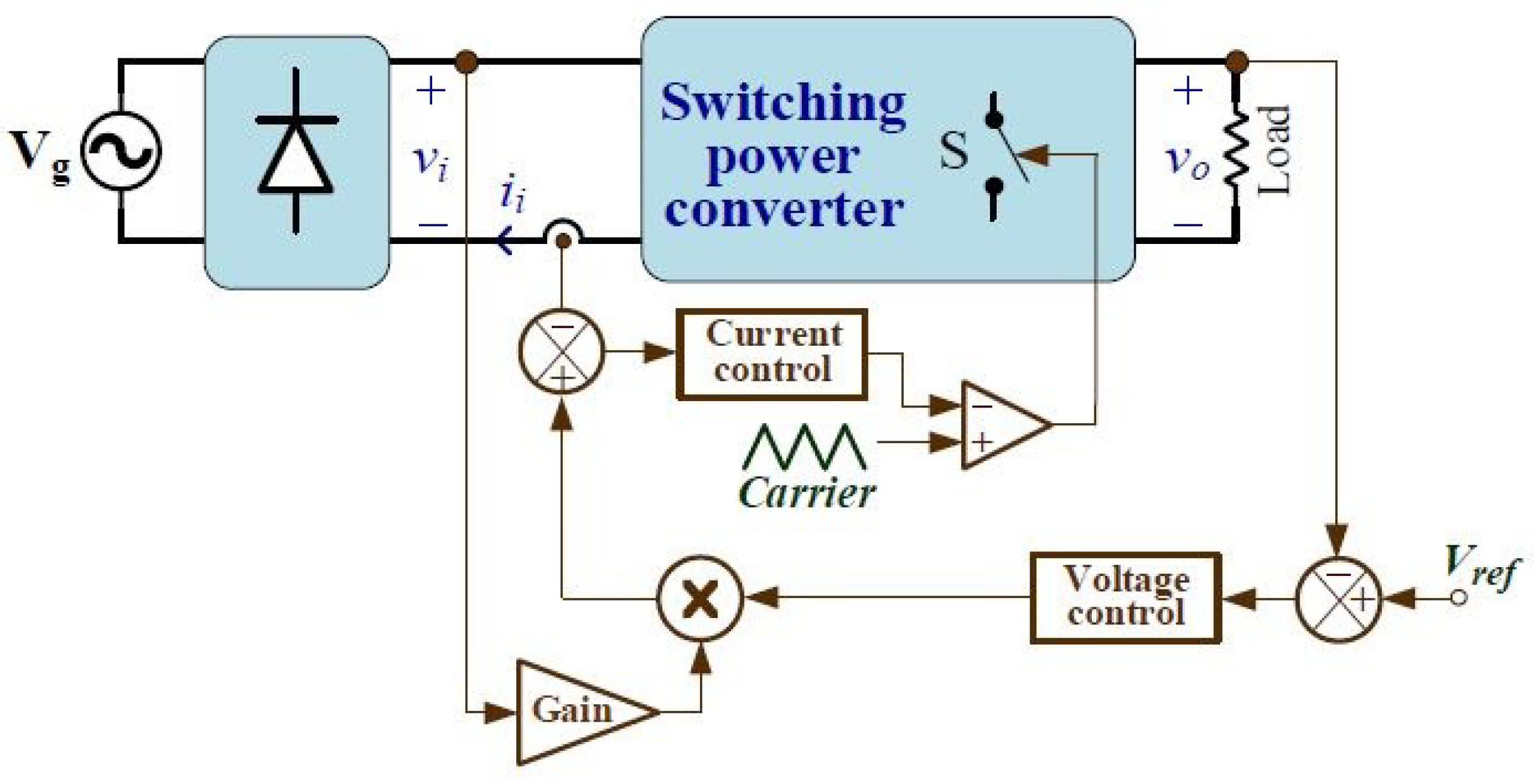
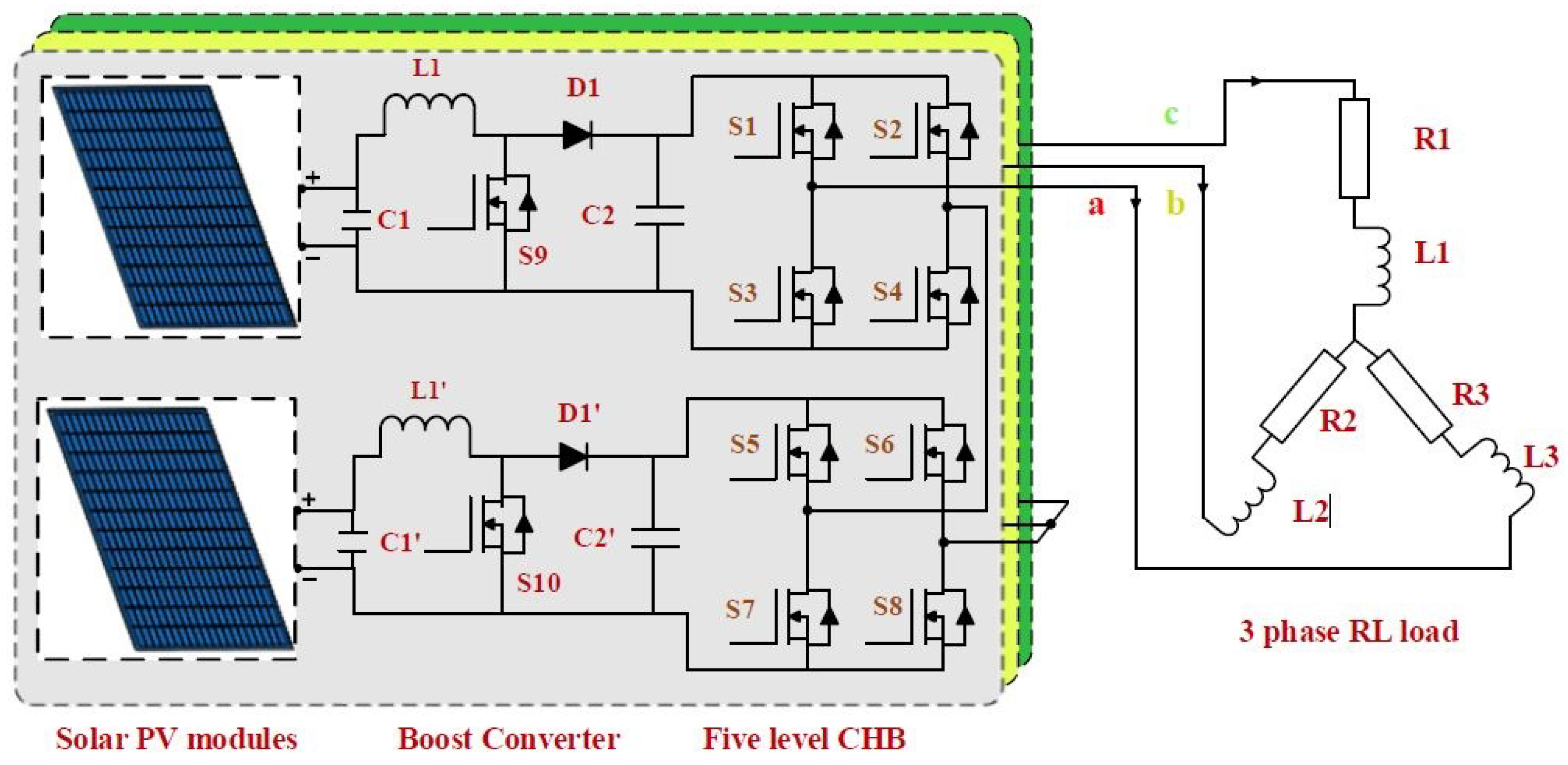
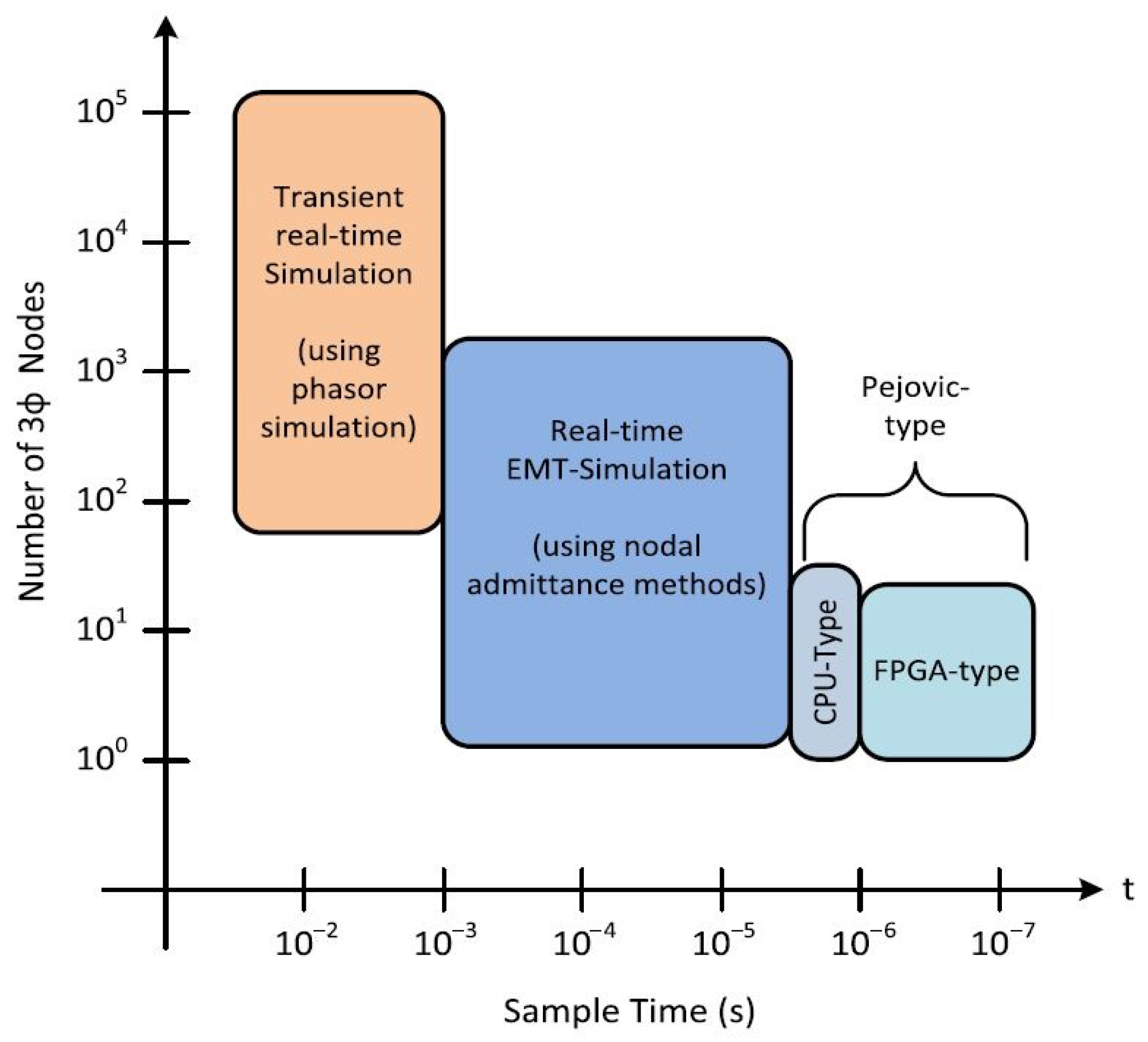
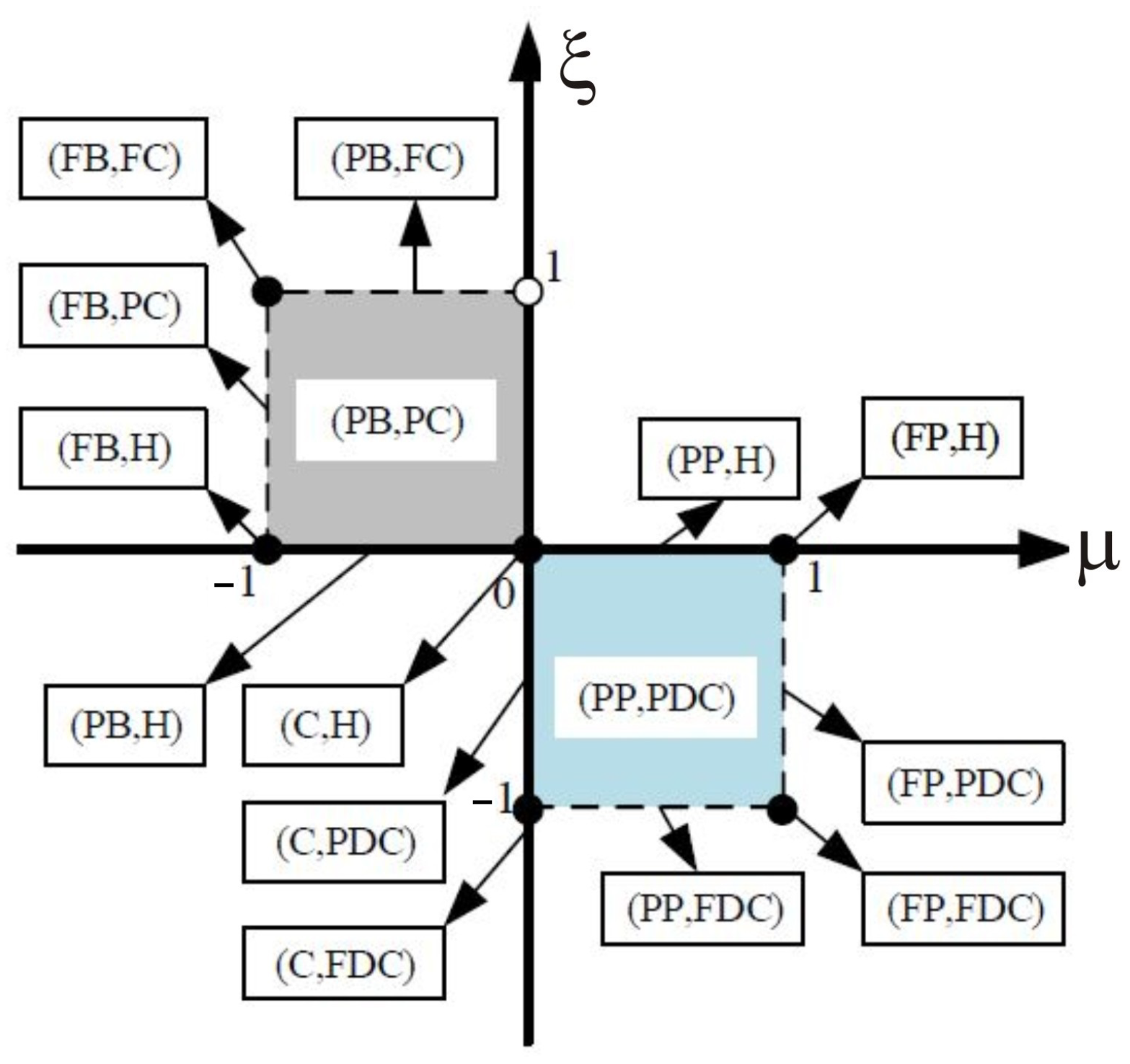
2.3. Power HIL Simulation for Power Electronics Converters
PE Converters and HIL Simulation Examples
- Group I: Operation in discontinuous conduction mode (DCM) or at the boundary condition (BCM);
- Group II: Linear control of the average current;
- Group III: Non-linear carrier (NLC) control of the line current;
- Group IV: Phasor-based control.
- Its bandwidth of the current acquisition stage is smaller than in the non-linear version.
- The bidirectional PFCs (H-bridge converters) allow the energy recovery, but the non-linear control the non-stable operating conditions may be exhibited.
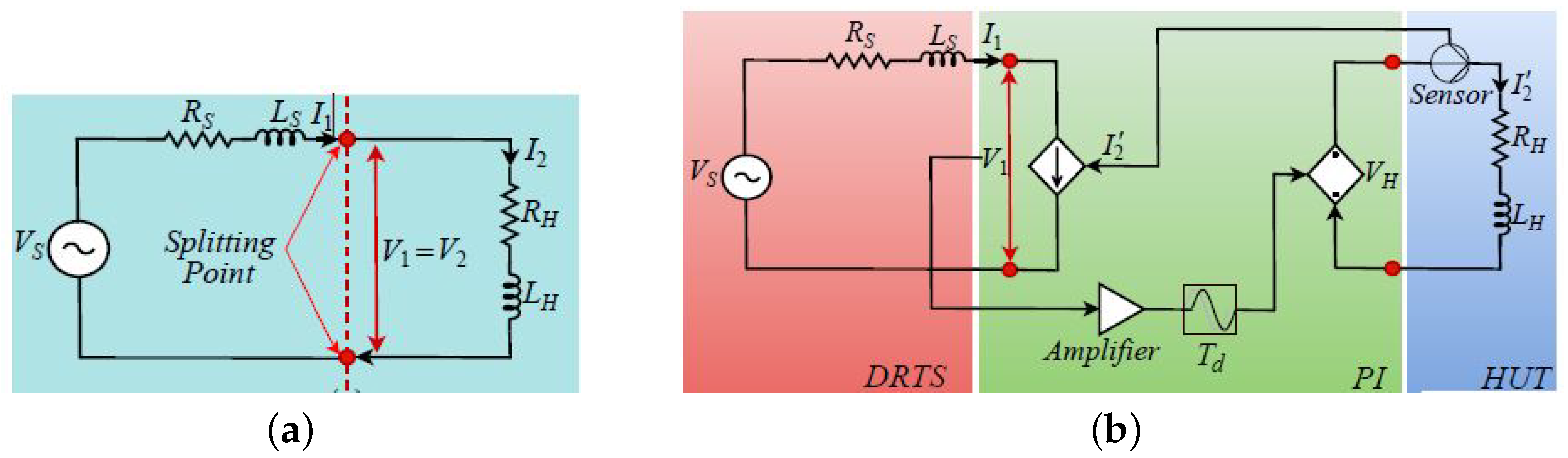
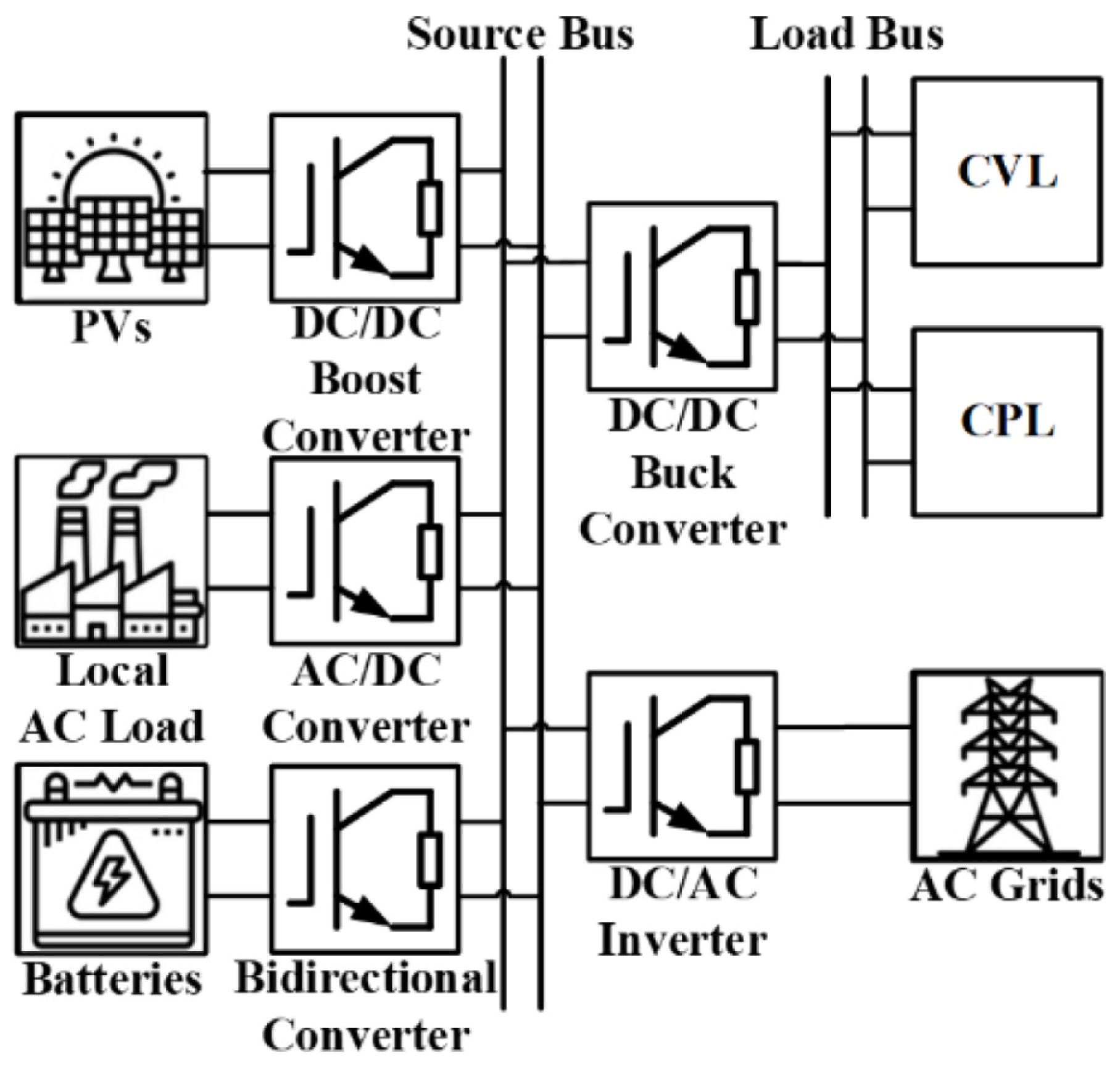
2.4. Power HIL Simulation for Grid Applications
Grid Applications and Power HIL Simulation Examples
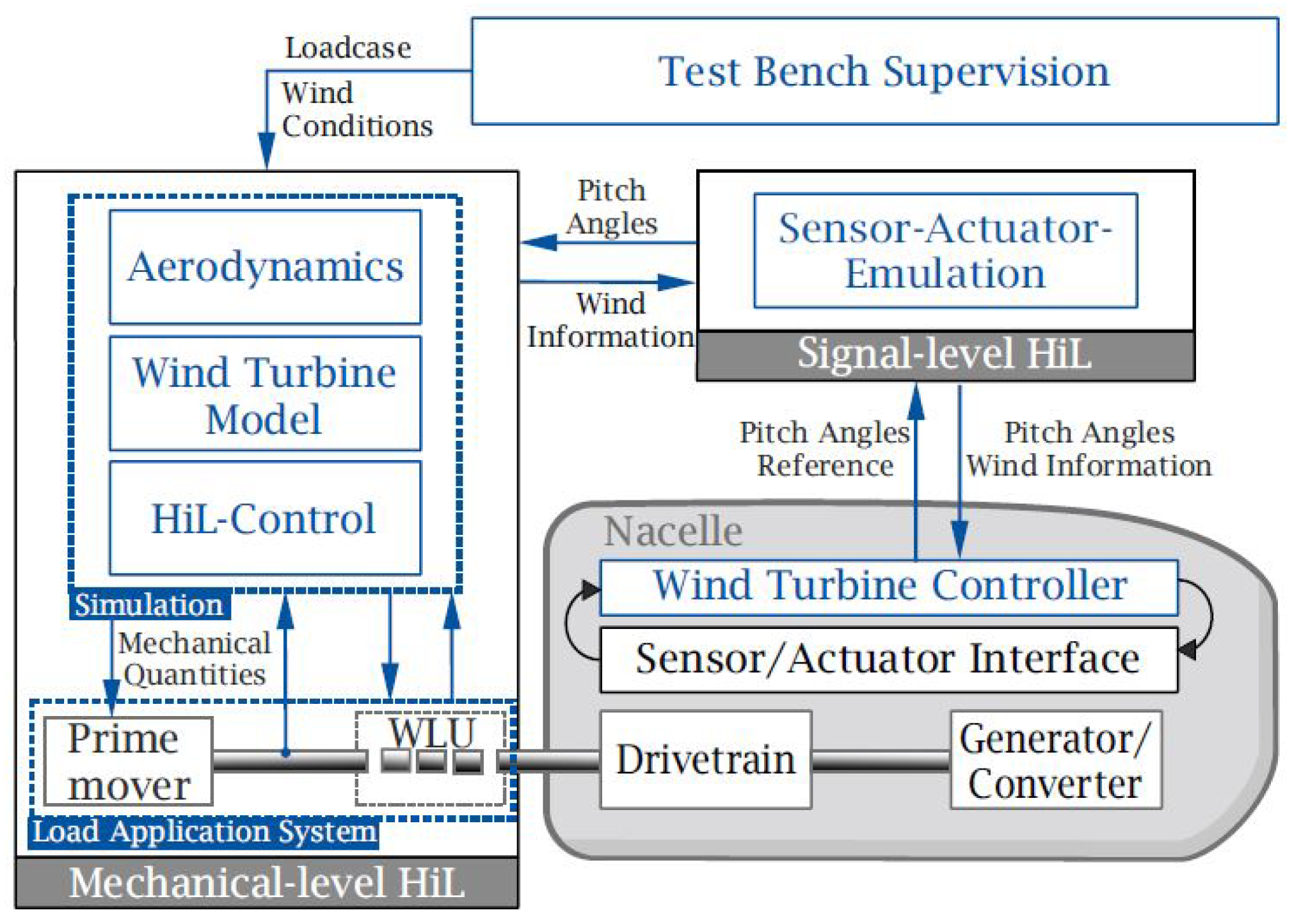
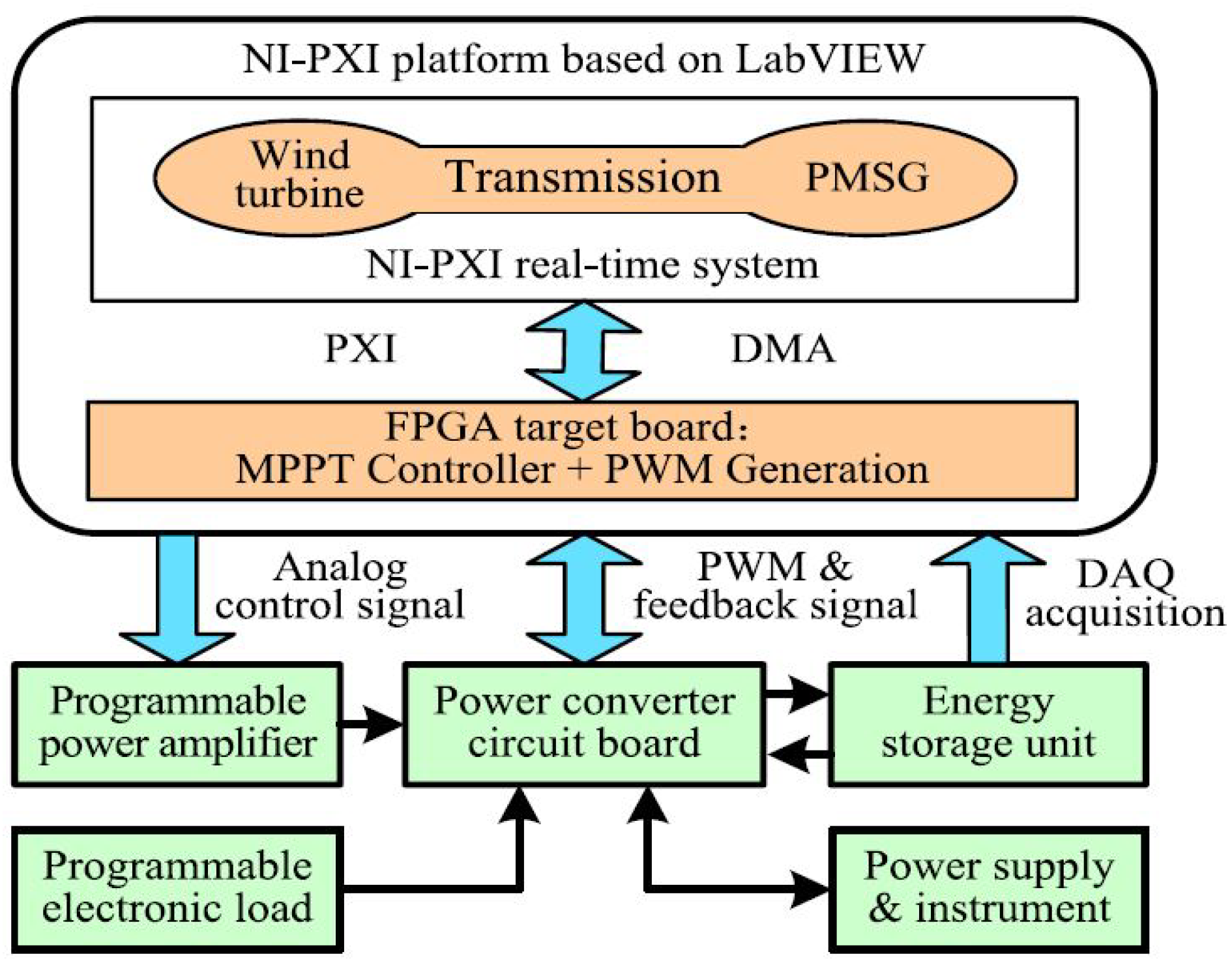
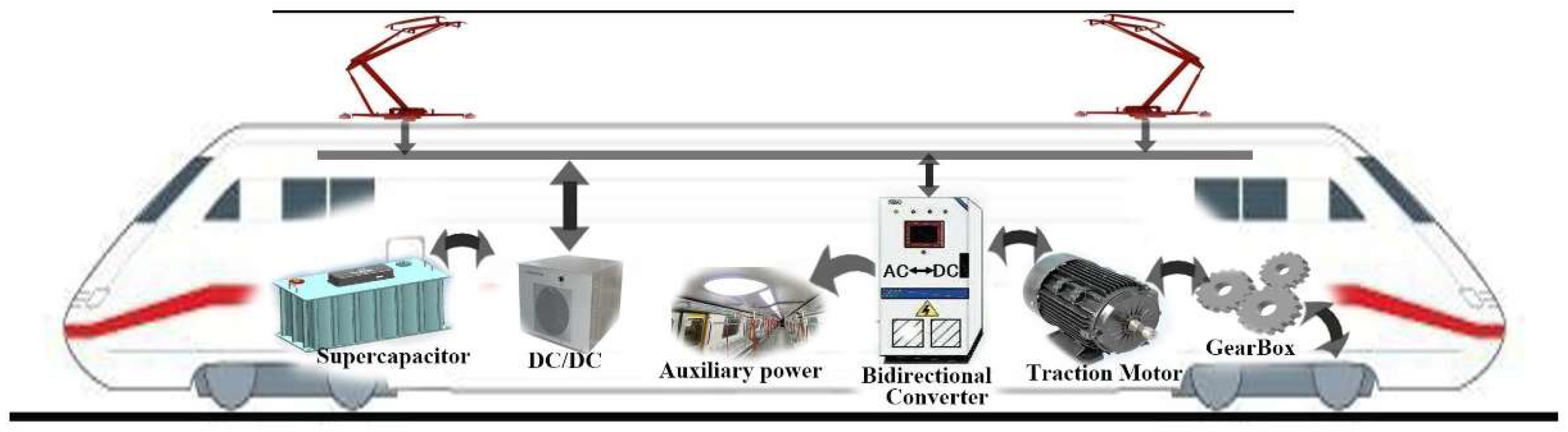
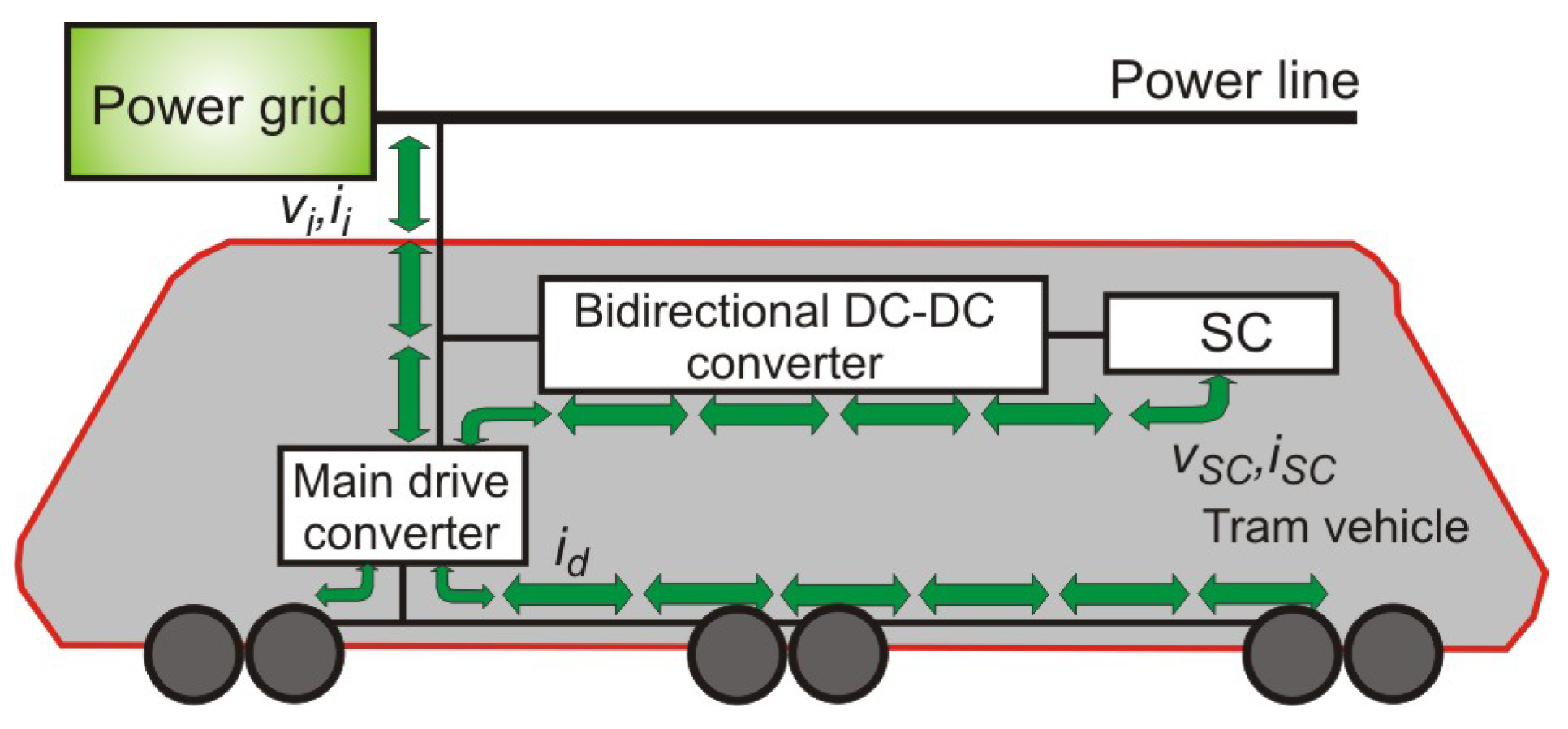
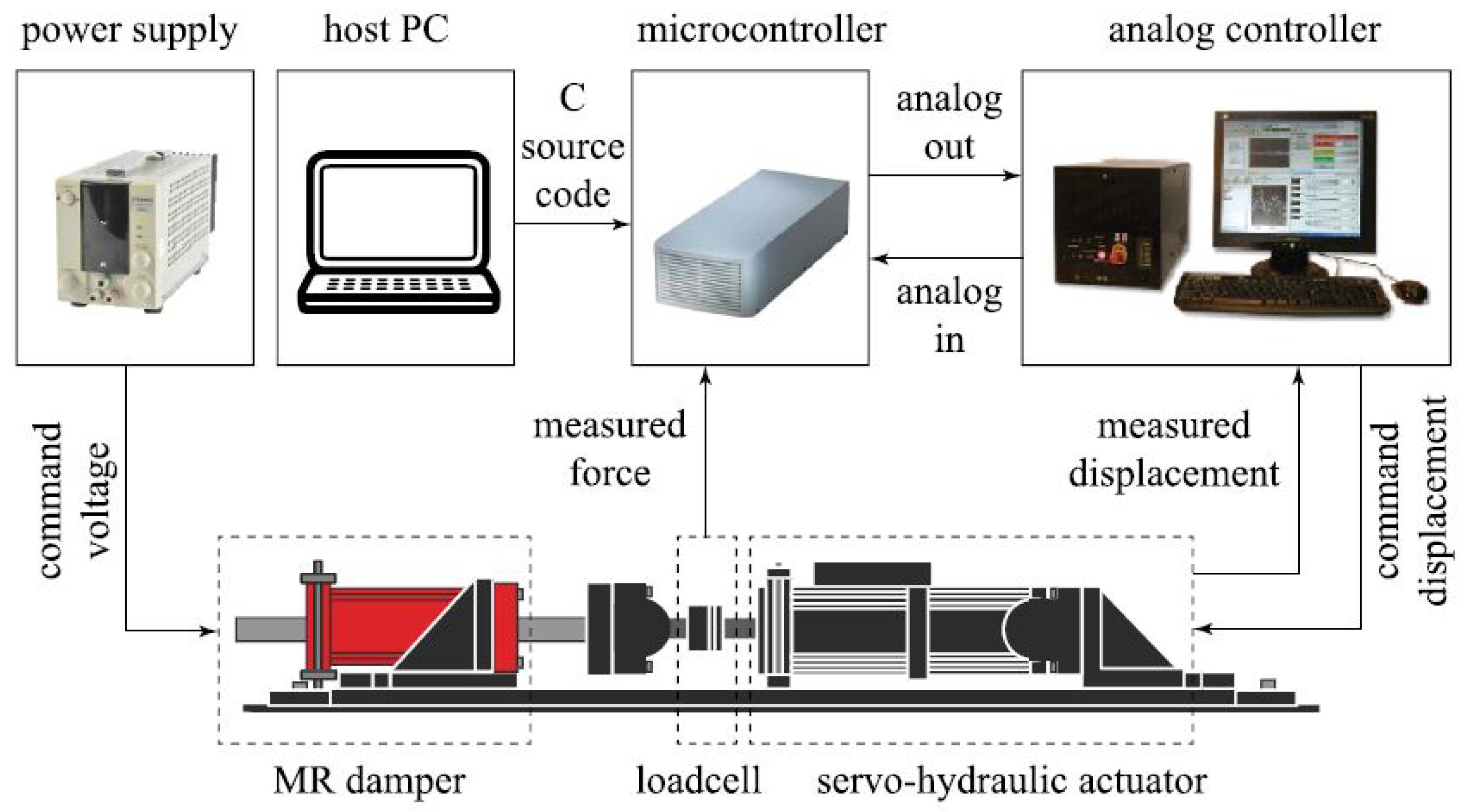
2.5. HIL Simulation in Railway Systems
Railway Systems and HIL Simulation Examples
2.6. Power HIL Simulation and Education
Education and Power HIL Simulation Examples
3. Conclusions
- Cost effectiveness;
- Rapid prototyping;
- Fidelity and verisimilitude (credibility);
- Simulation speed;
- Repeatability and stability;
- Non-destructive nature;
- Comprehensiveness;
- Flexibility;
- Parameter study, sensitivity analysis and optimization;
- Safety;
- Concurrent system engineering;
- Automated testing.
- No standard solutions, slow integration;
- No internal system under test information;
- Non-perfect virtualization and parameters, such as bus length, terminations, and back-feeding voltages related issues.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AC | Alternating current |
| ANN | Artificial neural network |
| BCM | Boundary continuous mode |
| BESS | Battery energy storage resource |
| BEV | Battery electric vehicle |
| CCM | Continuous conduction mode |
| CHIL | Controller HIL |
| CPL | Constant power load |
| DC | Direct current |
| DCM | Discontinuous conduction mode |
| DOF | Degree of freedom |
| DSP | Digital signal processor |
| DUT | Device under test |
| ECU | Electronic control unit |
| EIL | Engine in the loop |
| ELE | Electronic load emulation |
| ESA | European Aviation Safety Agency |
| ESPM | Equivalent small parameter method |
| FAA | Federal Aviation Administration |
| FPGA | Field programmable gate array |
| HDL | Hardware description language |
| HEV | Hybrid electric vehicle |
| HIL | Hardware-in-the-loop |
| HUT | Hardware under test |
| HVDC | High-voltage DC |
| IC | Internal combustion |
| MLI | Multilevel inverter |
| MPPT | Maximum power point tracking |
| PFC | Power factor correction |
| PHEV | Plug-in hybrid electric vehicle |
| PHIL | Power HIL |
| PV | Photovoltaic |
| RCP | Rapid control prototype |
| SMPS | Switching mode power supply |
| SOC | State of charge |
| SPWM | Sine pulse width modulation |
| THD | Total harmonic distortion |
| VHSIC | Very high-speed integrated circuits |
| VP | Virtual prototype |
| WLU | Wind load unit |
References
- Maclay, D. Simulations get into the loop. IEE Rev. 1997, 43, 109–112. [Google Scholar] [CrossRef]
- Bacic, M. On hardware-in-the-loop simulation. In Proceedings of the Conference on Decision and Control/European Control Conference, Seville, Spain, 12–15 December 2005; pp. 3194–3198. [Google Scholar] [CrossRef]
- Dillard, A.E. Real-time operational evaluations using advanced flight simulators. In Proceedings of the Digital Avionics Systems Conference, Bellevue, WA, USA, 31 October–7 November 1998; pp. E16-1–E16-8. [Google Scholar] [CrossRef]
- Pace, P.E.; Nishimura, B.H.; Morris, W.H.; Surratt, R.E. Effectiveness calculations in captive-carry HIL missile simulator experiments. Trans. Aerosp. Electron. Syst. 1998, 34, 124–136. [Google Scholar] [CrossRef]
- Evans, M.B.; Schilling, L.J. The Role of Simulation in the Development and Flight Test of the HiMAT Vehicle. NASA Technical Memorandum 84912. 1984. pp. 1–37. Available online: https://ntrs.nasa.gov/citations/19840013469 (accessed on 30 May 2022).
- Leitner, J. Space technology transition using hardware in the loop simulation. In Proceedings of the Aerospace Applications Conference, Aspen, CO, USA, 10 February 1996; pp. 303–311. [Google Scholar] [CrossRef]
- Gomez, M. Hardware-in-the-Loop Simulation. Available online: http://jmargolin.com/uavs/jm_rpv2_npl_14.pdf (accessed on 26 May 2022).
- Ingalalli, A.; Satheesh, H.; Kande, M. Platform for hardware in loop simulation. In Proceedings of the SPEEDAM, Capri, Italy, 22–24 June 2016; pp. 41–46. [Google Scholar] [CrossRef]
- Simulink; MathWorks, Inc.: Natick, MA, USA; Available online: https://www.mathworks.com/products/simulink.html (accessed on 12 June 2022).
- Simulink Real-Time; MathWorks, Inc.: Natick, MA, USA; Available online: https://www.mathworks.com/products/simulink-real-time.html (accessed on 12 June 2022).
- Hanselmann, H. Hardware-in-the-loop simulation testing and its integration into a CACSD toolset. In Proceedings of the Computer-Aided Control System Design Symposium, Dearborn, MI, USA, 15–18 September 1996; pp. 152–156. [Google Scholar] [CrossRef]
- Vogt, S.M.; Klostermann, M.; Kundu, A.; Andruschenko, S.; Hofmann, U.G. Hardware-in-the-loop testing for closed-loop brain stimulators. In Proceedings of the ECIFMBE, Antwerp, Belgium, 23–27 November 2008; pp. 1128–1132. [Google Scholar] [CrossRef]
- Puschmann, F. Safe testing through power hardware-in-the-loop systems. ATZ Electron. Worldw. 2021, 16, 50–53. [Google Scholar] [CrossRef]
- Milanovič, M.; Rodič, M.; Truntič, M. Functional safety in power electronics converters. In Proceedings of the EDPE, Dubrovnik, Croatia, 4–6 October 2017; pp. 1–14. [Google Scholar] [CrossRef]
- IEC 61508-1:2020; Functional Safety of Electrical/Electronic/Programmable Electronic Safety-Related Systems—Part 1: General Requirements, Edition 2.0. IEC: Geneva, Switzerland, 2010. Available online: https://webstore.iec.ch/publication/5515 (accessed on 6 June 2022).
- ISO 26262-1:2011; Road Vehicles—Functional Safety—Part 1: Vocabulary. International Organization for Standardization: Geneva, Switzerland, 2011. Available online: https://www.iso.org/obp/ui/#iso:std:iso:26262:-1:ed-1:v1:en (accessed on 6 June 2022).
- RTCA Inc. DO-178C/ED-12C: Software Considerations in Airborne Systems and Equipment Certification; Technical Report DO-178C; RTCA Inc.: Washington, DC, USA, 2012; Available online: https://en.wikipedia.org/wiki/DO-178C (accessed on 6 June 2022).
- RTCA Inc. DO-254, Design Assurance Guidance for Airborne Electronic Hardware; RTCA Inc.: Washington, DC, USA, 2000; Available online: https://en.wikipedia.org/wiki/DO-254 (accessed on 6 June 2022).
- Bosch, R. (Ed.) Automotive Electrics and Automotive Electronics, 5th ed.; John Wily and Sons Ltd.: Hoboken, NJ, USA, 2007. [Google Scholar] [CrossRef]
- Isermann, R.; Schaffnit, J.; Sinsel, S. Hardware-in-the-loop simulation for the design and testing of engine-control systems. Control Eng. Pract. 1999, 7, 643–653. [Google Scholar] [CrossRef]
- Rabbath, C.A.; Abdoune, M.; Belanger, J.; Butts, K. Simulating hybrid dynamic systems. IEEE Robot. Autom. Mag. 2002, 9, 39–47. Available online: https://www.academia.edu/26135462/Simulating_hybrid_dynamic_systems (accessed on 2 August 2022). [CrossRef]
- Brennan, S.; Alleyne, A.; DePoorter, M. The Illinois roadway simulator-a hardware-in-the-loop testbed for vehicle dynamics and control. In Proceedings of the ACC, Philadelphia, PA, USA, 26 June 1998; pp. 493–497. [Google Scholar] [CrossRef]
- Fathy, H.K.; Filipi, Z.S.; Hagena, J.; Stein, J.L. Review of hardware-in-the-loop simulation and its prospects in the automotive area. In Proceedings of the Modeling and Simulation for Military Applications, Orlando, FL, USA, 17–21 April 2006; SPIE: Bellingham, DC, USA, 2006; Volume 6228. [Google Scholar] [CrossRef]
- Short, M.; Pont, M.J. Hardware in the loop simulation of embedded automotive control system. In Proceedings of the Intelligent Transportation Systems, Vienna, Austria, 16 September 2005; pp. 226–231. [Google Scholar] [CrossRef]
- Short, M.; Pont, M.J. Assessment of high-integrity embedded automotive control systems using hardware in the loop simulation. J. Syst. Softw. 2008, 81, 1163–1183. [Google Scholar] [CrossRef]
- Setlur, P.; Wagner, J.; Dawson, D.; Powers, L. A hardware-in-the-loop and virtual reality test environment for steer-by-wire system evaluations. In Proceedings of the ACC, Denver, CO, USA, 4–6 June 2003; pp. 2584–2589. [Google Scholar] [CrossRef]
- Fényes, D.; Fazekas, M.; Németh, B.; Gáspár, P. Implementation of a variable-geometry suspension-based steering control system. Veh. Syst. Dyn. 2022, 60, 2018–2035. [Google Scholar] [CrossRef]
- Etzold, K.; Fahrbach, T.; Herold, K.; Andert, J. Thermal Hardware-in-the-Loop Tests of Electric Traction Machines. ATZ Worldw. 2019, 121, 50–55. [Google Scholar] [CrossRef]
- Bagameri, N.; Varga, B.O.; Moldovanu, D.; Csato, A.; Karamousantas, D. Optimizing Shifting Schedule and Hardware-in-the-Loop Simulation of a Hybrid Vehicle Based on Dual Clutch Transmission. In Proceedings of the Automotive and Transport Engineering, Cluj-Napoca, Romania, 30 September 2018; pp. 320–327. [Google Scholar] [CrossRef]
- Dooner, M.; Wang, J.; Mouzakitis, A. Dynamic modelling and experimental validation of an automotive windshield wiper system for hardware in the loop simulation. Syst. Sci. Control Eng. 2015, 3, 230–239. [Google Scholar] [CrossRef]
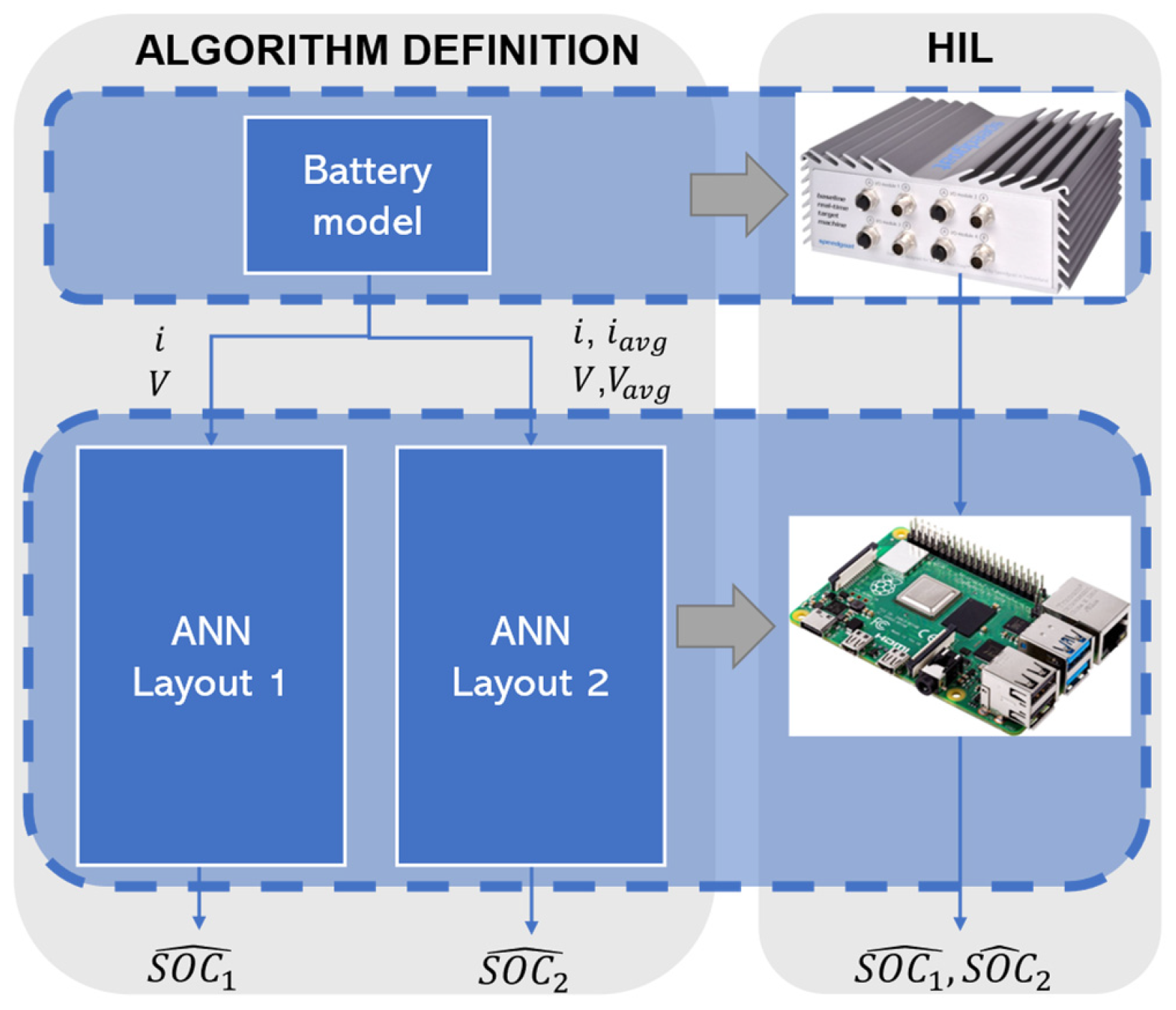
- Luciani, S.; Feraco, S.; Bonfitto, A.; Tonoli, A. Hardware-in-the-loop assessment of a data-driven state of charge estimation method for lithium-ion batteries in hybrid vehicles. Electronics 2021, 10, 2828. [Google Scholar] [CrossRef]
- Samiee, S.; Nahvi, A.; Azadi, S.; Kazemi, R.; Hatamian Haghighi, A.R.; Ashouri, M.R. The effect of torque feedback exerted to driver’s hands on vehicle handling—A hardware-in-the-loop approach. Syst. Sci. Control Eng. 2015, 3, 129–141. [Google Scholar] [CrossRef]
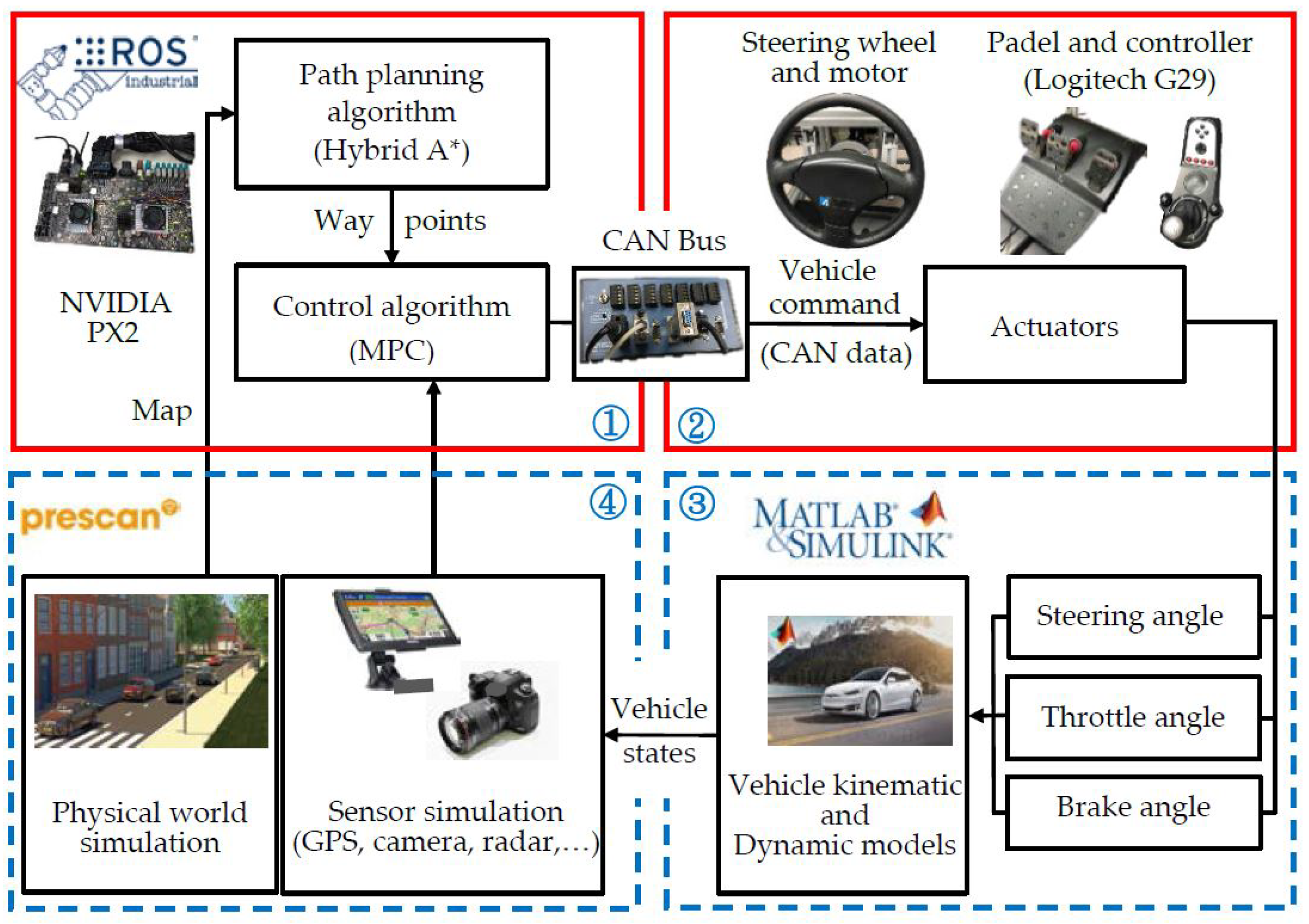
- Chung, Y.; Yang, Y.-P. Hardware-in-the-loop simulation of self-driving electric vehicles by dynamic path planning and model predictive control. Electronics 2021, 10, 2447. [Google Scholar] [CrossRef]
- Parodi, O.; Lapierre, L.; Jouvencel, B. Hardware-in-the-loop simulators for multi-vehicles scenarios: Survey on existing solutions and proposal of a new architecture. In Proceedings of the Intelligent Robots and System, St. Louis, MO, USA, 10–15 October 2009; pp. 225–230. [Google Scholar] [CrossRef]
- Parodi, O.; Creuze, V.; Jouvencel, B. Communications with Thetis, a real time multi-vehicles hybrid simulator. In Proceedings of the International Society of Offshore and Polar Engineers, Vancouver, BC, Canada, 6–11 July 2008; pp. 1–8. Available online: https://www.researchgate.net/publication/29608446_Communications_with_Thetis_a_Real_Time_Multi-vehicles_Hybrid_Simulator (accessed on 2 August 2022).
- Major, P.; Zghyer, R.; Zhang, H.; Hildre, H.P. A framework for rapid virtual prototyping: A case study with the Gunnerus research vessel. Ship Technol. Res. 2021; ahead of print. [Google Scholar] [CrossRef]
- Bouscayrol, A. Different types of hardware-in-the-loop simulation for electric drives. In Proceedings of the ISIE, Cambridge, UK, 30 June–2 July 2008; p. 2146. [Google Scholar] [CrossRef]
- Glumac, S.; Varga, N.; Raos, F.; Kovačić, Z. Co-simulation perspective on evaluating the simulation with the engine test bench in the loop. Automatika 2022, 63, 275–287. [Google Scholar] [CrossRef]
- Gundogdu, A.; Celikel, R.; Dandil, B.; Ata, F. FPGA in-the-loop implementation of direct torque control for induction motor. Automatika 2021, 62, 275–283. [Google Scholar] [CrossRef]
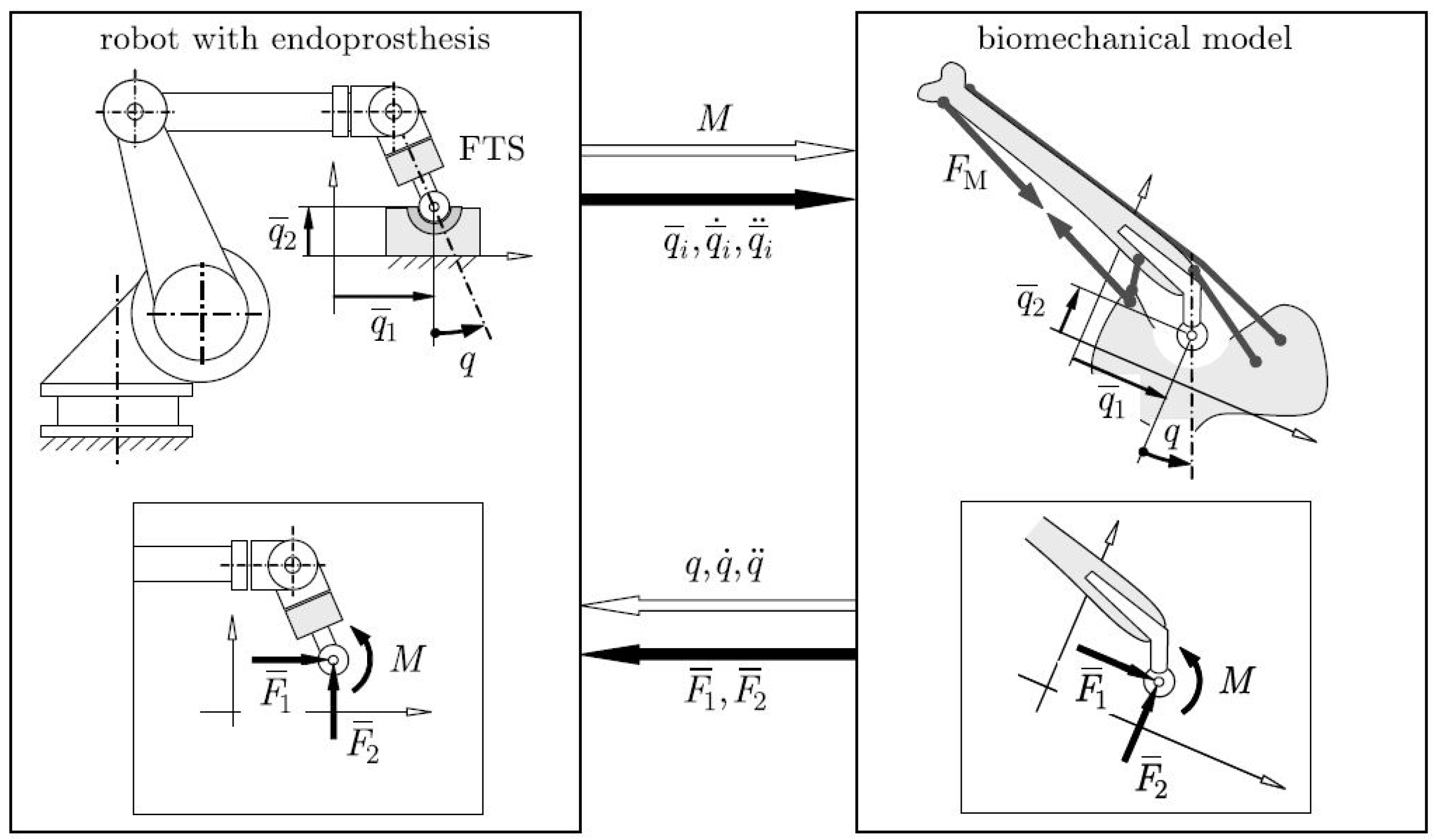
- Kähler, M.; Woernle, C.; Bader, R. Hardware-in-the-loop-simulaton of constraint elements in mechanical systems. In Computational Kinematics; Kecskeméthy, A., Müller, A., Eds.; Springer: Berlin, Germany, 2009; pp. 159–166. [Google Scholar]
- Adler, F.; Benigni, A.; Stagge, H.; Monti, A.; De Doncker, R.W. A new versatile hardware platform for digital real-time simulation: Verification and evaluation. In Proceedings of the COMPEL, Kyoto, Japan, 10–13 June 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Yushkova, M.; Sanchez, A.; de Castro, A. Strategies for choosing an appropriate numerical method for FPGA-based HIL. Int. J. Electr. Power Energy Syst. 2021, 132, 107168. [Google Scholar] [CrossRef]
- Cirugeda-Roldan, E.M.; Martínez-García, M.S.; Sanchez, A.; de Castro, A. Evaluation of the different numerical formats for HIL models of power converters after the adoption of VHDL-2008 by Xilinx. Electronics 2021, 10, 1952. [Google Scholar] [CrossRef]
- Durbaba, E.; Akpinar, E.; Balikci, A.; Azizoglu, B.T.; Kocamis, A.E. Fast prototyping of a photovoltaic system by using DSP in MATLAB simulation loop. In Proceedings of the IECON, Lisbon, Portugal, 14–19 October 2019; pp. 1769–1773. [Google Scholar] [CrossRef]
- Wang, X.; Qiu, B.; Wang, H. Comparisons of modeling methods for fractional-order Cuk converter. Electronics 2021, 10, 710. [Google Scholar] [CrossRef]
- Zamiri, E.; Sanchez, A.; Yushkova, M.; Martínez-García, M.S.; de Castro, A. Comparison of different Design Alternatives for Hardwarein-the-Loop of Power Converters. Electronics 2021, 10, 926. [Google Scholar] [CrossRef]
- Lamo, P.; de Castro, A.; Sanchez, A.; Ruiz, G.A.; Azcondo, F.J.; Pigazo, A. Hardware-in-the-loop and digital control techniques applied to single-phase pfc converters. Electronics 2021, 10, 1563. [Google Scholar] [CrossRef]
- Stefanski, L.; Bernet, D.; Schnarrenberger, M.; Rollbuhler, C.; Liske, A.; Hiller, M. Cascaded H-bridge based parallel hybrid converter - A novel topology for perfectly sinusoidal high power voltage sources. In Proceedings of the IECON, Lisbon, Portugal, 14–19 October 2019; pp. 1639–1646. [Google Scholar] [CrossRef]
- Ansari, M.A.; Rahman, K.; Roomi, M.M.; Pervez, I.; Lodi, K.A.; Tariq, M.; Mishra, N. Solar PV fed three phase cascaded H bridge multi-level inverter. In Proceedings of the IECON, Singapore, 18–21 October 2020; pp. 3325–3330. [Google Scholar] [CrossRef]
- Lauss, G.; Lehfuss, F.; Viehweider, A.; Strasser, T. Power hardware in the loop simulation with feedback current filtering for electric systems. In Proceedings of the IECON, Melbourne, VIC, Australia, 7–10 November 2011; pp. 3725–3730. [Google Scholar] [CrossRef]
- Lauss, G.; Faruque, M.O.; Schoder, K.; Dufour, C.; Viehweider, A.; Langston, J. Characteristics and design of power hardware-in-the-loop simulations for electrical power systems. IEEE Trans. Ind. Electron. 2016, 63, 406–417. [Google Scholar] [CrossRef]
- Saad, H.; Rault, P.; Dennetière, S.; Schudel, M.; Wikstrom, C.; Sharifabadi, K. HIL simulation to assess interaction risks of HVDC systems for upcoming grid development. In Proceedings of the IECON, Singapore, 18–21 October 2020; pp. 5041–5048. [Google Scholar] [CrossRef]
- Feng, Z.; Peña-Alzola, R.; Seisopoulos, P.; Guillo-Sansano, E.; Syed, M.; Norman, N.; Burt, G. A Scheme to improve the stability and accuracy of power hardware-in-the-loop simulation. In Proceedings of the IECON, Singapore, 18–21 October 2020; pp. 5027–5032. [Google Scholar] [CrossRef]
- Resch, S.; Friedrich, J.; Wagner, T.; Mehlmann, G.; Luther, M. Stability analysis of power hardware-in-the-loop simulations for grid applicationss. Electronics 2022, 11, 7. [Google Scholar] [CrossRef]
- Baudette, M.; Swartz, J.; Moffat, K.; Pakshong, J.; Chu, L.; Gehbauer, C.; von Meier, A. Hardware-in-the-loop benchmarking setup for phasor based control validation. IFAC-PapersOnLine 2021, 54, 747–752. [Google Scholar] [CrossRef]
- Zhou, J.; Hassan, M.A.; Zhang, J.; Zhang, Z.; Wu, S.; Hou, M.; Li, Y.; Li, E.; Guerrer, J.M. A novel continuous control set model predictive control to guarantee stability and robustness for buck power converter in DC microgrids. Energy Rep. 2021, 7, 1400–1415. [Google Scholar] [CrossRef]
- Espinoza, R.F.; Justino, G.; Otto, R.B.; Ramos, R. Real-time RMS-EMT co-simulation and its application and its application in HIL testing protective relays. Electr. Power Syst. Res. 2021, 197, 107326. [Google Scholar] [CrossRef]
- Basler, M.; Leisten, C.; Jassmann, U.; Abel, D. Experimental validation of inertia-eigenfrequency emulation for wind turbines on system test benches. In Proceedings of the IECON, Singapore, 18–21 October 2020; pp. 205–212. [Google Scholar] [CrossRef]
- Wu, A.; Mao, J.-F.; Zhang, X. An ADRC-based hardware-in-the-loop system for maximum power point tracking of a wind power generation system. IEEE Access 2020, 8, 226119–226130. [Google Scholar] [CrossRef]
- Liu, W.; Xu, J.; Tang, J. Study on control strategy of urban rail train with on-board regenerative braking energy storage system. In Proceedings of the IECON, Beijing, China, 29 October–1 November 2017; pp. 3924–3929. [Google Scholar] [CrossRef]
- Pavlović, T.; Župan, I.; Šunde, V.; Ban, Ž. HIL simulation of a tram regenerative braking system. Electronics 2021, 10, 1379. [Google Scholar] [CrossRef]
- Tell, S.; Andersson, A.; Najafi, A.; Spencer, B.F., Jr.; Karoumi, R. Real-time hybrid testing for efficiency assessment of magnetorheological dampers to mitigate train-induced vibrations in bridges. Int. J. Rail Transp. 2021, 10, 436–455. [Google Scholar] [CrossRef]
- Shiakolas, P.S.; Piyabongkarn, D. Development of a real-time digital control system with a hardware-in-the-loop magnetic levitation device for reinforcement of controls education. IEEE Trans. Educ. 2003, 46, 79–87. [Google Scholar] [CrossRef]
- Shiakolas, P.S.; Van Schenck, S.R.; Piyabongkarn, D.; Frangeskou, I. Magnetic levitation hardware-in-the-loop and MATLAB-based experiments for reinforcement of neural network control concepts. IEEE Trans. Educ. 2004, 47, 33–41. [Google Scholar] [CrossRef]
- Kuperman, A.; Rabinovici, R. Virtual torque and inertia loading of controlled electric drive. IEEE Trans. Educ. 2005, 48, 47–52. [Google Scholar] [CrossRef]
- Sagmeister, P. System Models for HIL Testing in Automotive Industry on FPGA with dSpace Software. Master’s Thesis, University of Maribor, Maribor, Slovenia, May 2022. (In Slovene). [Google Scholar]
- Niechcial, F. LV 123: Understand Test Requirements and Implement Them Effortlessly. Electrical Normative Basics and Practical Challenges for Vehicle Components and Systems. Available online: https://www.volta.it/wp-content/uploads/2017/11/07-FN_LV-123_E_2017-06-06-Frank-Niechcial.pdf (accessed on 6 June 2022).
- ISO 21498-1; Electrically Propelled Road Vehicles—Electrical Specifications and Tests for Voltage Class B Systems and Components—Part 1: Voltage Sub-Classes and Characteristics. International Organization for Standardization: Geneva, Switzerland, 2021. Available online: https://www.iso.org/obp/ui/#iso:std:iso:21498:-1:ed-1:v1:en (accessed on 2 August 2022).
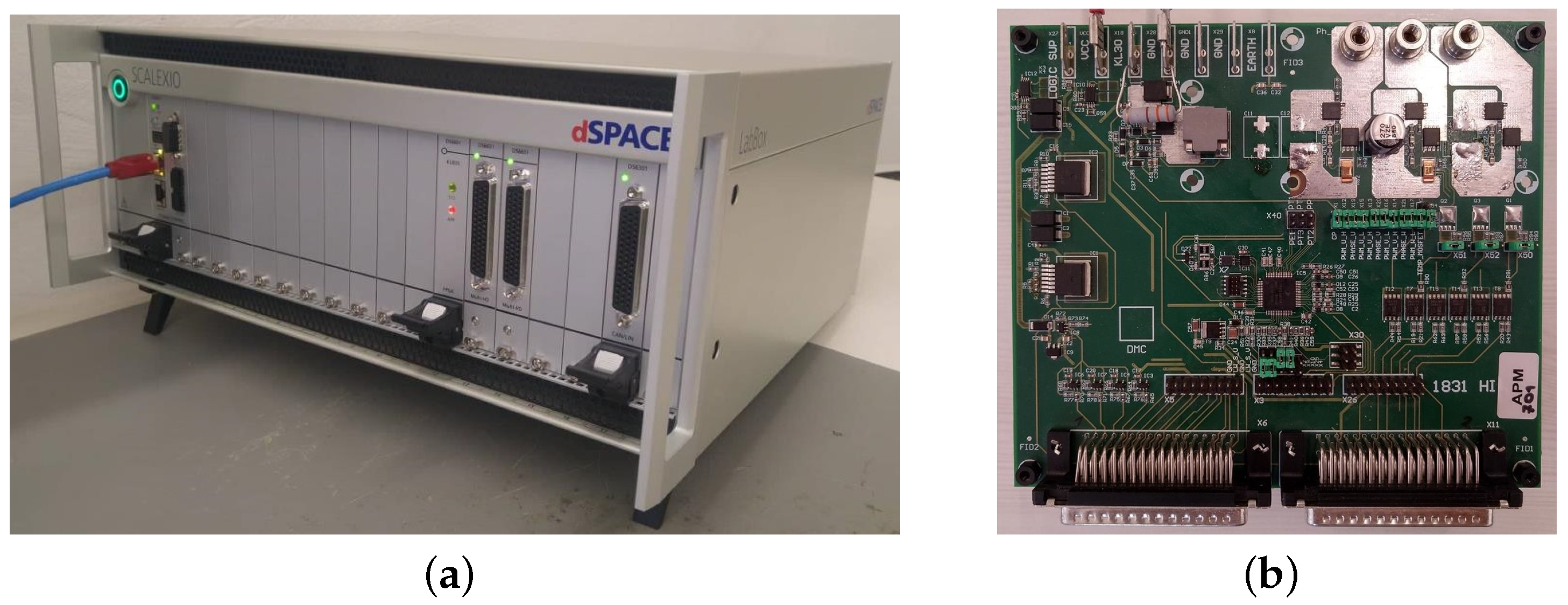
- dSPACE, ControlDesk: SCALEXIO. Available online: https://www.dspace.com/en/inc/home/products/hw/simulator_hardware/scalexio/scalexio_labbox.cfm (accessed on 29 June 2022).
- Simscape Multibody; MathWorks, Inc.: Natick, MA, USA; Available online: https://www.mathworks.com/products/simscape-multibody.html (accessed on 12 June 2022).
- Bose, B.K. Power Electronics and Motor Drives: Advances and Trends; Academic Press: Cambridge, MA, USA; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Blaschke, F. A newmethod for the structural decoupling of AC induction machines. In Proceedings of the IFAC, Dusseldorf, Germany, October 1971; pp. 1–15. [Google Scholar]
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics and AC Drives, 2nd ed.; Prentice Hall: Hoboken, NJ, USA; John Wiley & Sons, Inc.: New York, NY, USA, 1989. [Google Scholar]
- Bryant, B.; Kazimierczuk, M.K. Small-signal duty cycle to inductor current transfer function for boost PWM DC-DC converter in continuous conduction mode. In Proceedings of the ISCAS, Vancouver, BC, Canada, 23–26 May 2004; pp. 856–859. [Google Scholar] [CrossRef]
- Das, S.; Pan, I.; Saha, S.; Kumar, A.; Das, S.; Gupta, A. Revisiting Oustaloup’s recursive filter for analog realization of fractional order differintegrators. In Proceedings of the International Conference on Energy, Automation and Signal, Bhubaneswar, India, 28–30 December 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Sanchez, A.; de Castro, A.; López, V.M.; Azcondo, F.J.; Garrido, J. Single ADC digital PFC controller using precalculated duty cycles. IEEE Trans. Power Electron. 2014, 29, 996–1005. [Google Scholar] [CrossRef]
- López, F.; López-Martín, V.M.; Azcondo, F.J.; Corradini, L.; Pigazo, A. Current-sensorless power factor correction with predictive controllers. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 891–900. [Google Scholar] [CrossRef]
- Hacke, P.; Lokanath, S.; Williams, P.; Vasan, A.; Sochor, P.; TamizhMani, G.S.; Shinohara, H.; Kurtz, S. A status review of photovoltaic power conversion equipment reliability, safety, and quality assurance protocols. Renew. Sustain. Energy Rev. 2018, 82, 1097–1112. [Google Scholar] [CrossRef]
- Pejovic, P.; Maksimovic, D. A method for fast time-domain simulation of networks with switches. IEEE Trans. Power Electron. 1994, 9, 449–456. [Google Scholar] [CrossRef]
- Ciccarelli, F.; Iannuzzi, D.; Tricoli, P. Control of metro-trains equipped with onboard supercapacitors for energy saving and reduction of power peak demand. Transp. Res. Part C 2012, 24, 36–49. [Google Scholar] [CrossRef]
- Matlab; MathWorks, Inc.: Natick, MA, USA; Available online: https://www.mathworks.com/products/matlab.html (accessed on 12 June 2022).










































Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mihalič, F.; Truntič, M.; Hren, A. Hardware-in-the-Loop Simulations: A Historical Overview of Engineering Challenges. Electronics 2022, 11, 2462. https://doi.org/10.3390/electronics11152462
Mihalič F, Truntič M, Hren A. Hardware-in-the-Loop Simulations: A Historical Overview of Engineering Challenges. Electronics. 2022; 11(15):2462. https://doi.org/10.3390/electronics11152462
Chicago/Turabian StyleMihalič, Franc, Mitja Truntič, and Alenka Hren. 2022. "Hardware-in-the-Loop Simulations: A Historical Overview of Engineering Challenges" Electronics 11, no. 15: 2462. https://doi.org/10.3390/electronics11152462
APA StyleMihalič, F., Truntič, M., & Hren, A. (2022). Hardware-in-the-Loop Simulations: A Historical Overview of Engineering Challenges. Electronics, 11(15), 2462. https://doi.org/10.3390/electronics11152462