
Dynamic Feedback versus Varna-Based Techniques for SDN Controller Placement Problems



Abstract
:1. Introduction
2. Related Work
3. Mathematical Model for the Controller Placement Problem
- ) is the shortest path between switch and controller .
- is the shortest path between controllers .
- is the set of all possible placements for controllers.
- is the total number of intercontroller paths.
4. Reference Model: Varna-Based Optimization (VBO) for CPP
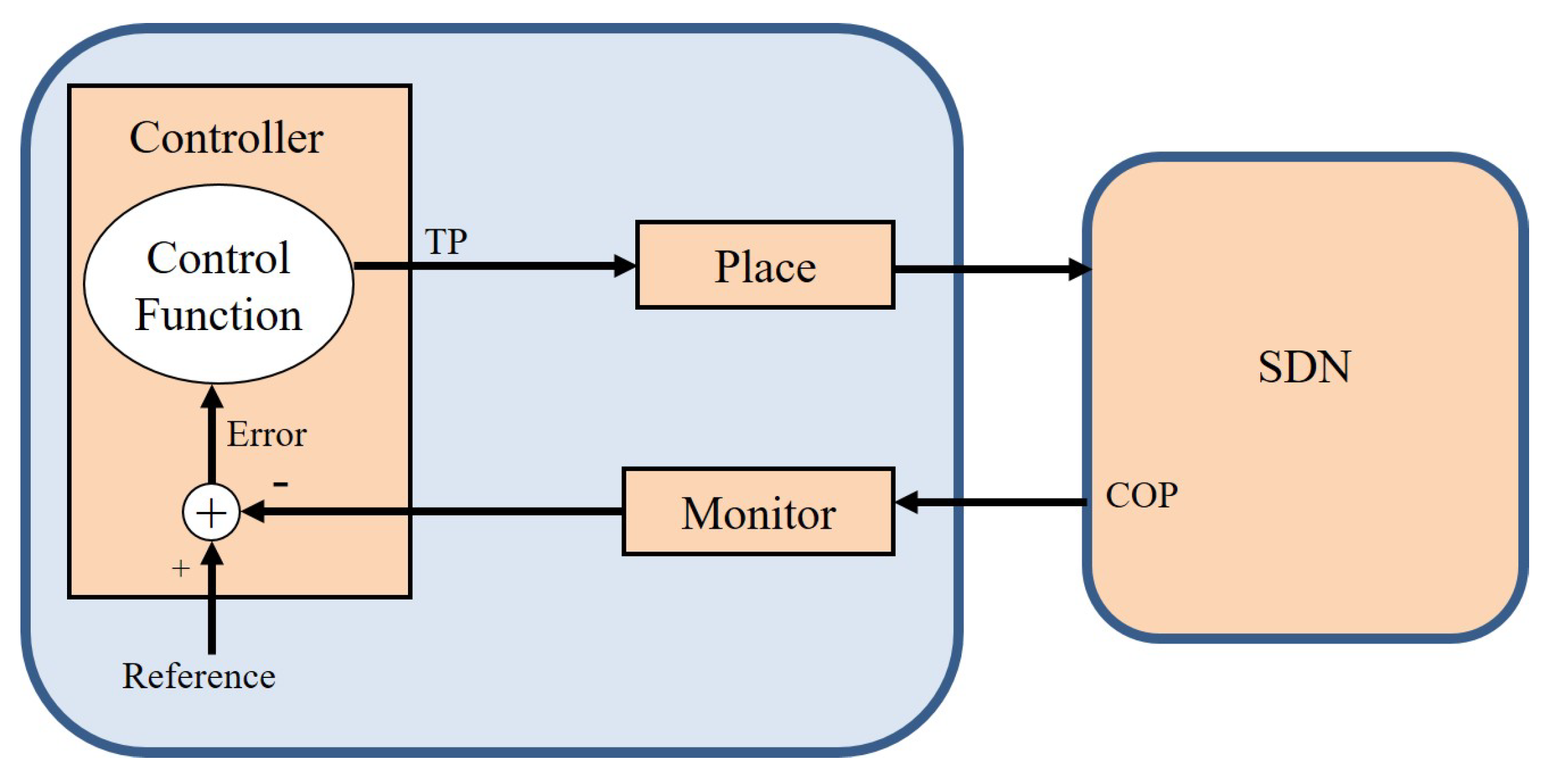
5. Proposed Model: DFBCPSDN for CPP
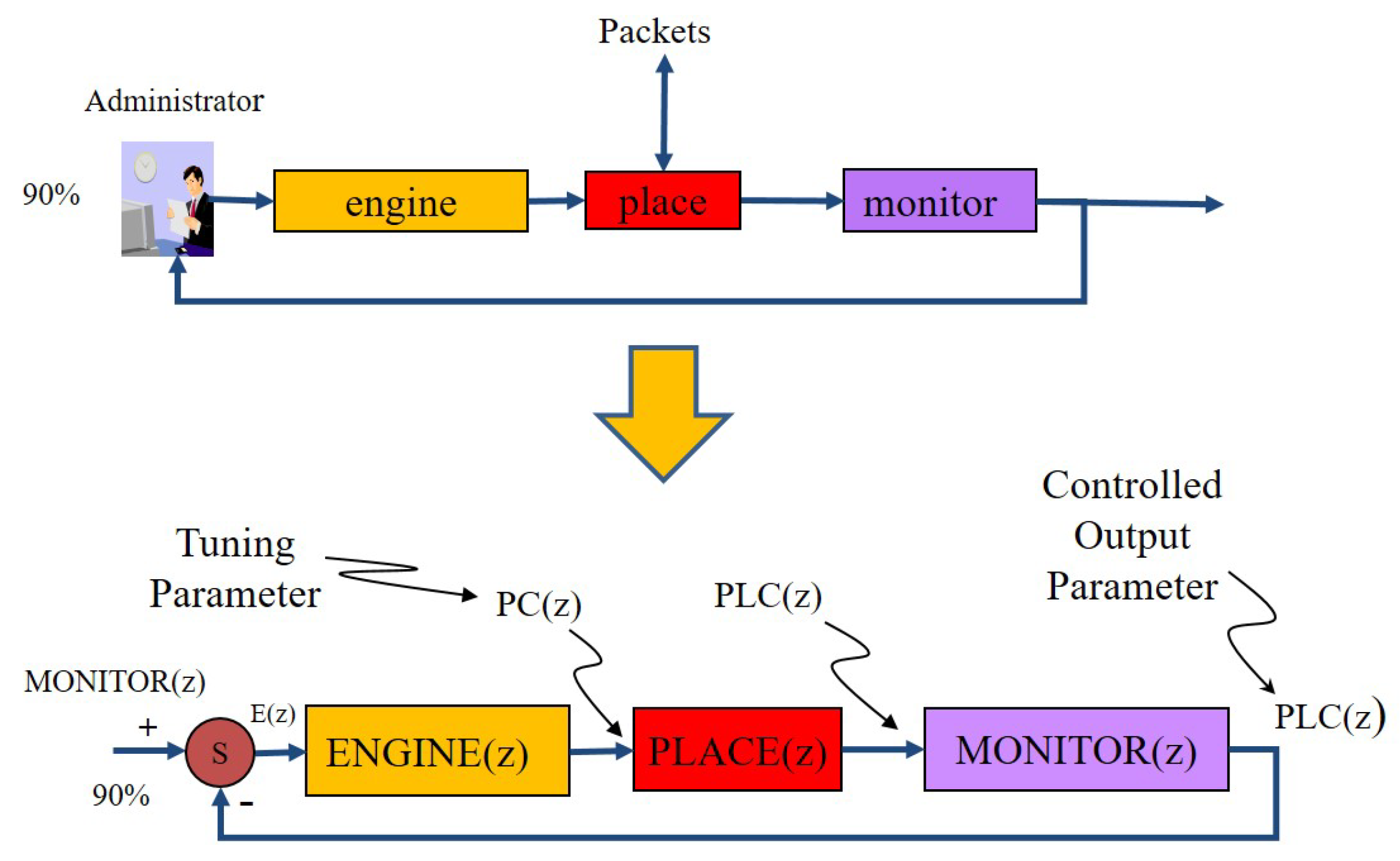
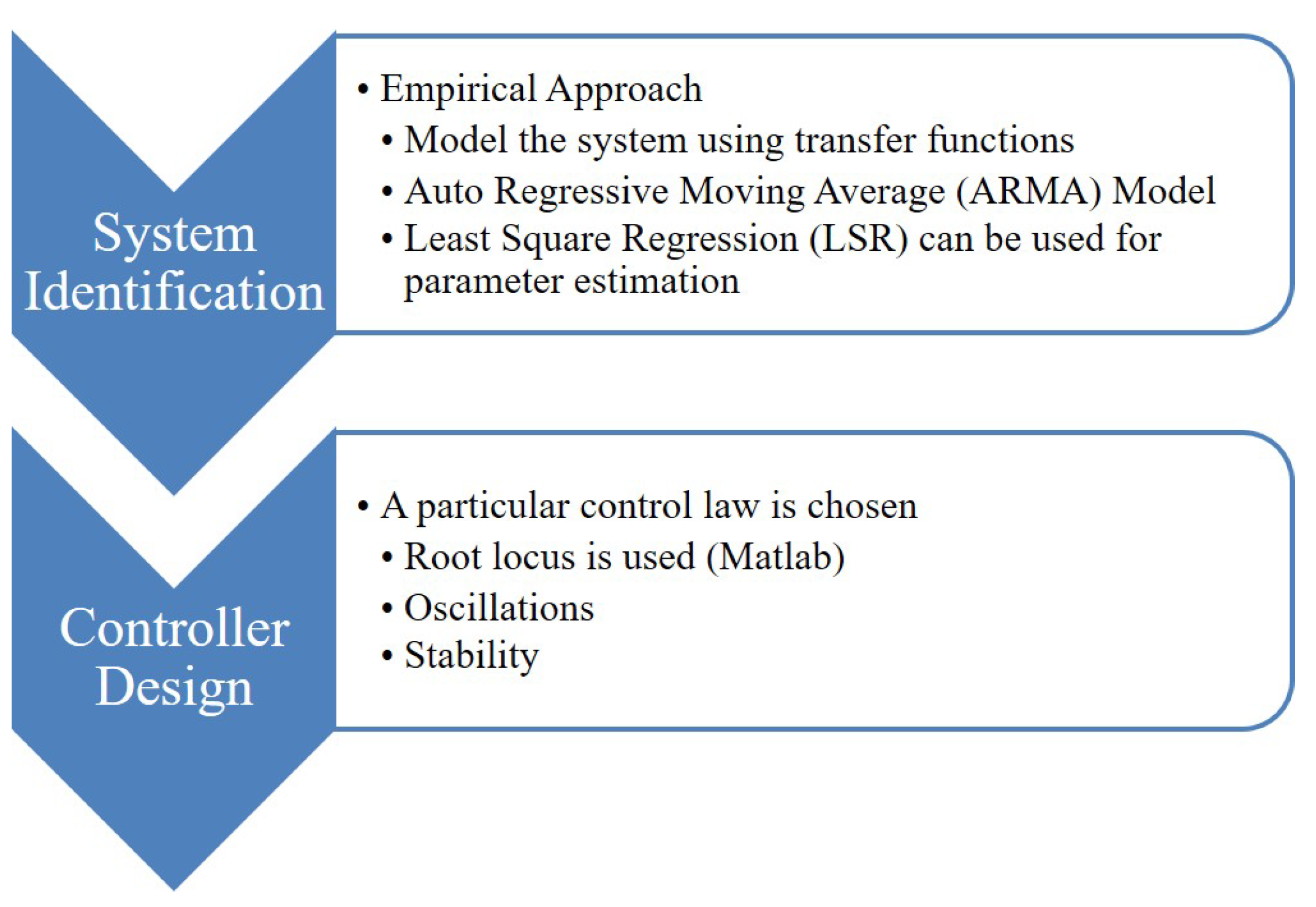
5.1. DFBCPSDN System Identification through the ARMA Model
5.2. DFBCPSDN Control Law and Gain Selection
| Algorithm 1 DFBCPSDN Algorithm. |
Input: , reference target, , Termination criteria Output: FBPlacement, FBUtilityfunction
|
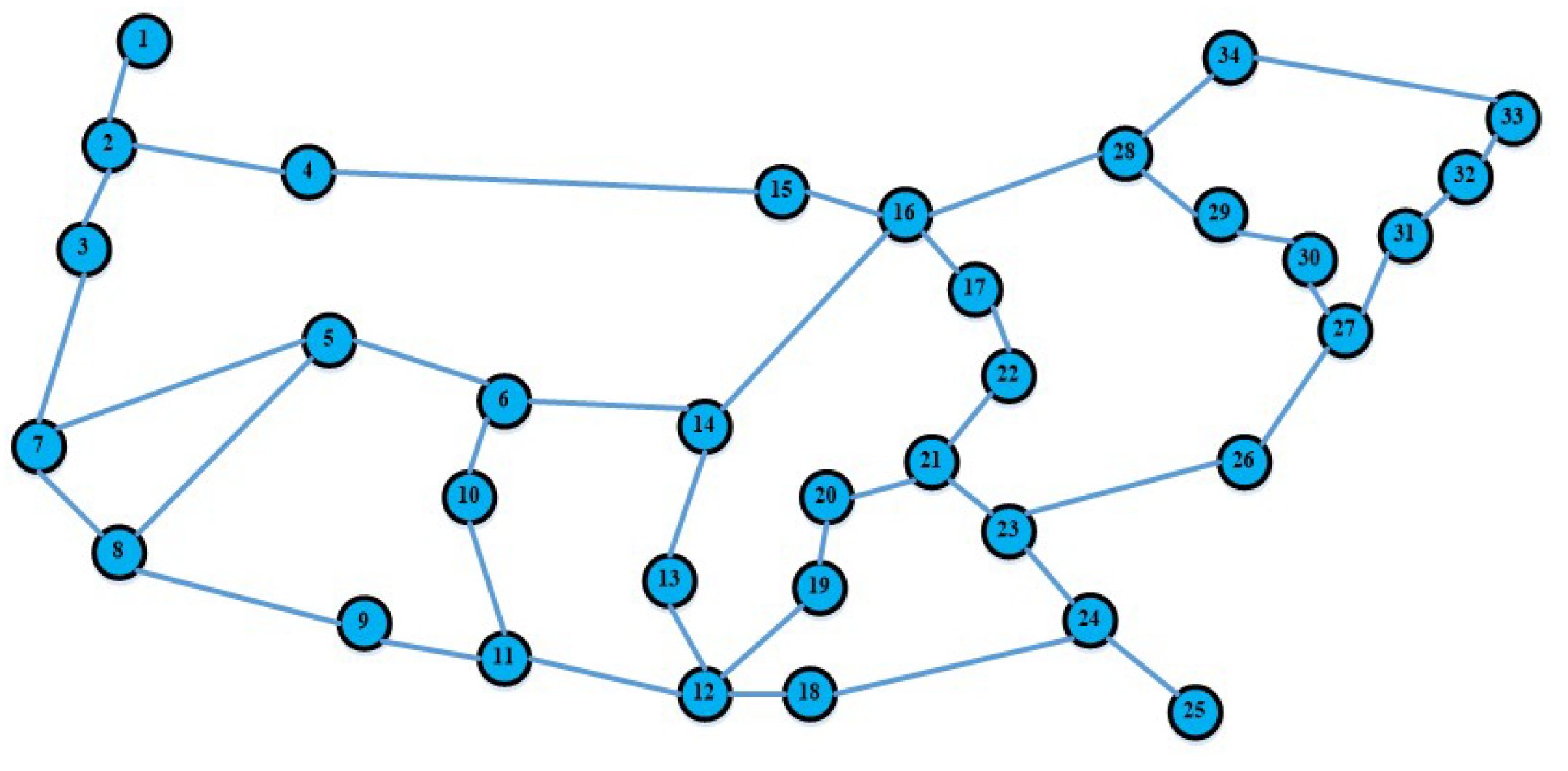
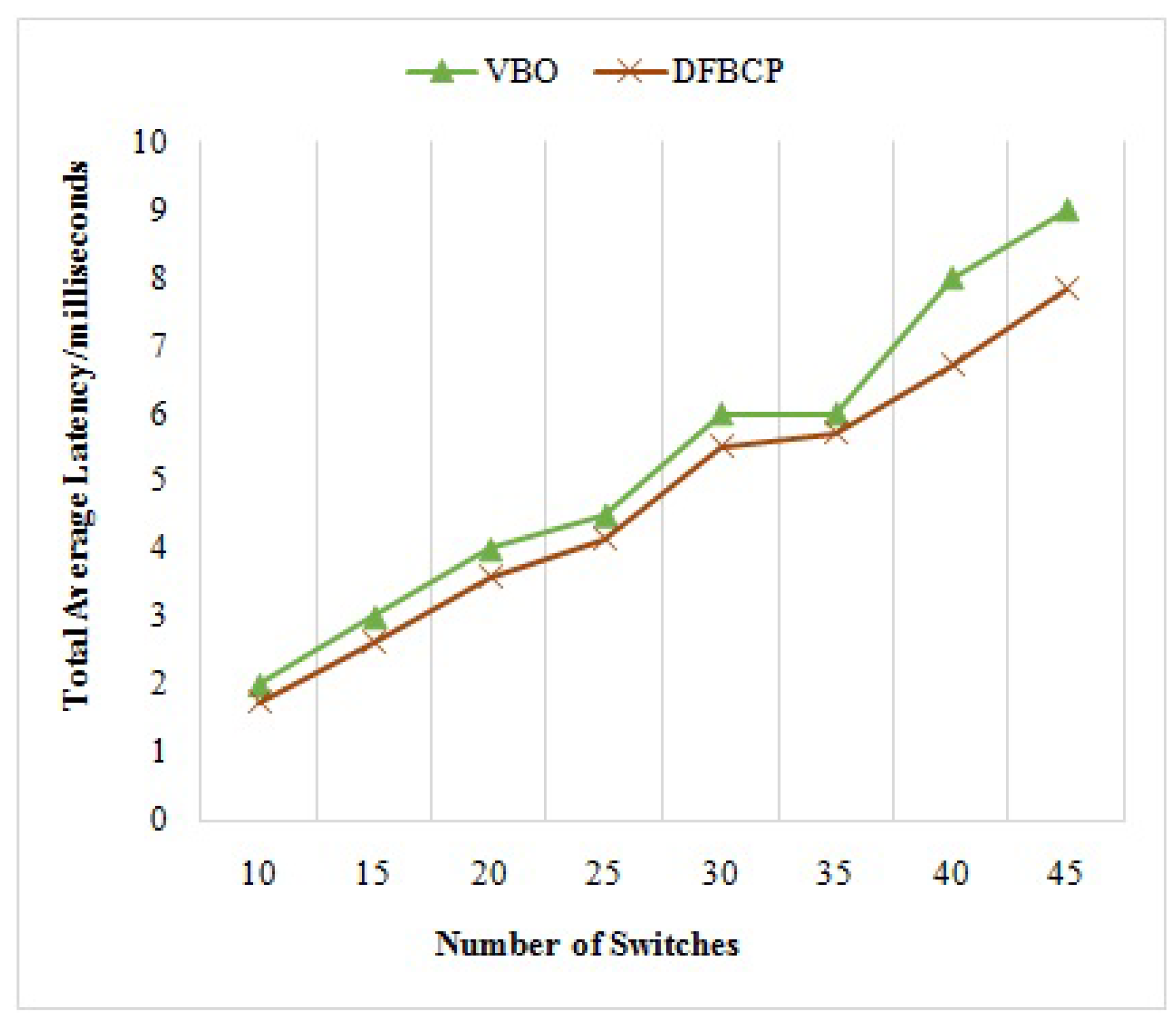
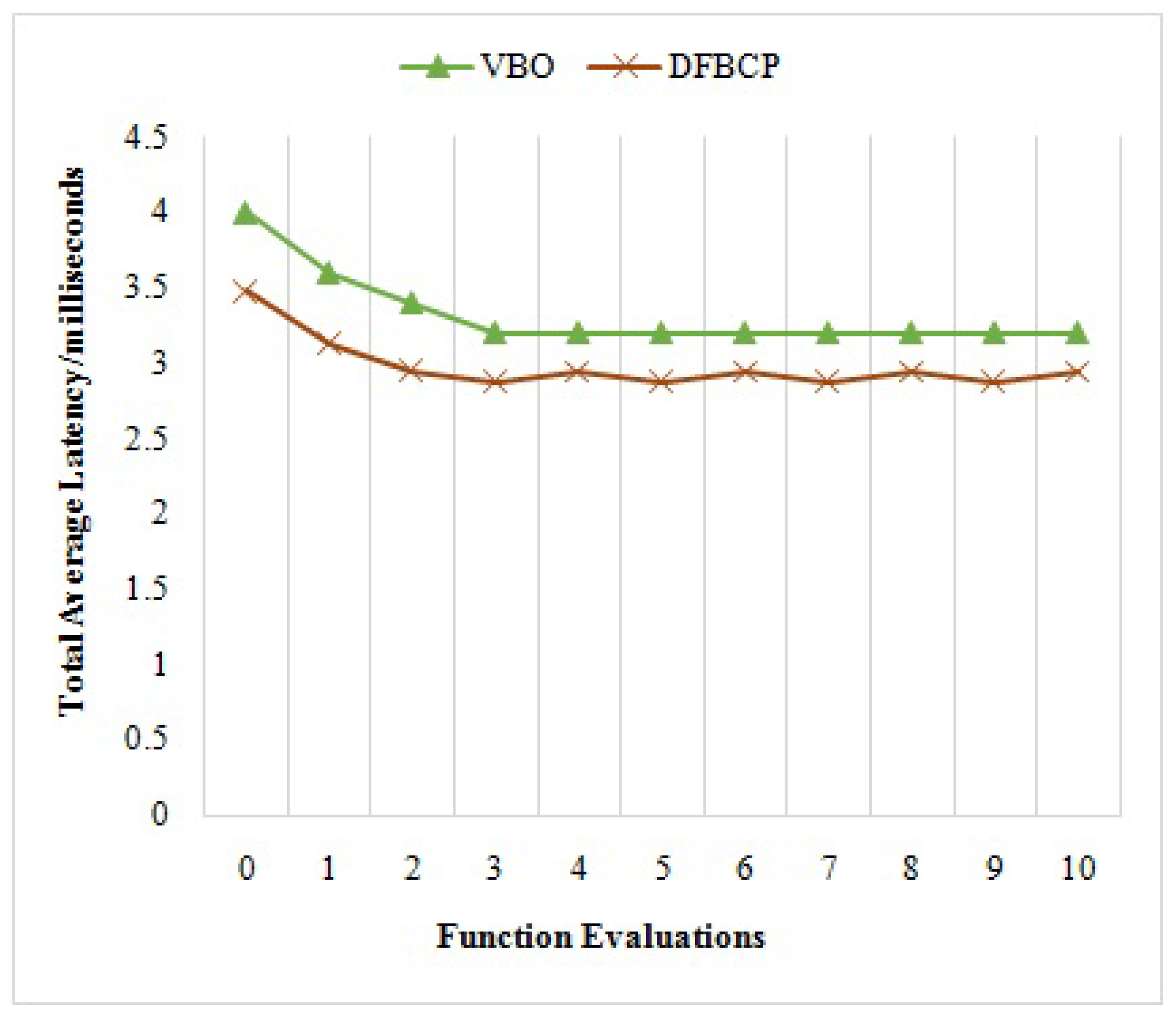
6. Results and Analysis
7. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Fundation, O.N. Software-defined networking: The new norm for networks. ONF White Pap. 2012, 2, 11. [Google Scholar]
- Fundation, O.N. SDN Architecture Overview version 1.0. ONF White Paper 2013, 1–5. [Google Scholar]
- Jammal, M.; Singh, T.; Shami, A.; Asal, R.; Li, Y. Software defined networking: State of the art and research challenges. Comput. Netw. 2014, 72, 74–98. [Google Scholar] [CrossRef] [Green Version]
- Farhady, H.; Lee, H.; Nakao, A. Software-defined networking: A survey. Comput. Netw. 2015, 81, 79–95. [Google Scholar] [CrossRef]
- Singh, A.K.; Srivastava, S. A survey and classification of controller placement problem in SDN. Int. J. Netw. Manag. 2018, 28, e2018. [Google Scholar] [CrossRef]
- Hakiri, A.; Gokhale, A.; Berthou, P.; Schmidt, D.C.; Gayraud, T. Software-defined networking: Challenges and research opportunities for future internet. Comput. Netw. 2014, 75, 453–471. [Google Scholar] [CrossRef]
- Gong, Y.; Huang, W.; Wang, W.; Lei, Y. A survey on software defined networking and its applications. Front. Comput. Sci. 2015, 9, 827–845. [Google Scholar] [CrossRef]
- Isong, B.; Molose, R.R.S.; Abu-Mahfouz, A.M.; Dladlu, N. Comprehensive review of SDN controller placement strategies. IEEE Access 2020, 8, 170070–170092. [Google Scholar] [CrossRef]
- Das, T.; Sridharan, V.; Gurusamy, M. A survey on controller placement in SDN. IEEE Commun. Surv. Tutor. 2019, 22, 472–503. [Google Scholar] [CrossRef]
- Singh, A.K.; Maurya, S.; Kumar, N.; Srivastava, S. Heuristic approaches for the reliable SDN controller placement problem. Trans. Emerg. Telecommun. Technol. 2020, 31, e3761. [Google Scholar] [CrossRef]
- Torkamani-Azar, S.; Jahanshahi, M. A new GSO based method for SDN controller placement. Comput. Commun. 2020, 163, 91–108. [Google Scholar] [CrossRef]
- Singh, A.K.; Srivastava, S.; Banerjea, S. Evaluating heuristic techniques as a solution of controller placement problem in SDN. J. Ambient. Intell. Humaniz. Comput. 2022, 1–18. [Google Scholar] [CrossRef]
- Aly, W.H.F. LBFTFB fault tolerance mechanism for software defined networking. In Proceedings of the 2017 International Conference on Electrical and Computing Technologies and Applications (ICECTA), Ras Al Khaimah, United Arab Emirates, 21–23 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Aly, W.H.F. A novel fault tolerance mechanism for software defined networking. In Proceedings of the 2017 European Modelling Symposium (EMS), Manchester, UK, 20–21 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 233–239. [Google Scholar]
- Aly, W.H.F.; Kotb, Y. Towards SDN fault tolerance using petri-nets. In Proceedings of the 2018 28th International Telecommunication Networks and Applications Conference (ITNAC), Sydney, Australia, 21–23 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–3. [Google Scholar]
- Aly, W.H.F.; Al-anazi, A.M.A. Enhanced CONTROLLER Fault Tolerant (ECFT) model for software defined networking. In Proceedings of the 2018 Fifth International Conference on Software Defined Systems (SDS), Barcelona, Spain, 23–26 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 217–222. [Google Scholar]
- Ahmed, R.; Boutaba, R. Design considerations for managing wide area software defined networks. IEEE Commun. Mag. 2014, 52, 116–123. [Google Scholar] [CrossRef]
- Lange, S.; Gebert, S.; Spoerhase, J.; Rygielski, P.; Zinner, T.; Kounev, S.; Tran-Gia, P. Specialized heuristics for the controller placement problem in large scale SDN networks. In Proceedings of the 2015 27th International Teletraffic Congress, Ghent, Belgium, 8–10 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 210–218. [Google Scholar]
- Aly, W.H.F. Generic controller adaptive load balancing (GCALB) for SDN networks. J. Comput. Netw. Commun. 2019, 2019, 6808693. [Google Scholar] [CrossRef] [Green Version]
- Singh, A.K.; Maurya, S.; Srivastava, S. Varna-based optimization: A novel method for capacitated controller placement problem in SDN. Front. Comput. Sci. 2020, 14, 143402. [Google Scholar] [CrossRef]
- Tootoonchian, A.; Gorbunov, S.; Ganjali, Y.; Casado, M.; Sherwood, R. On Controller Performance in {Software-Defined} Networks. In Proceedings of the 2nd USENIX Workshop on Hot Topics in Management of Internet, Cloud, and Enterprise Networks and Services (Hot-ICE 12), San Jose, CA, USA, 24 April 2012. [Google Scholar]
- Heller, B.; Sherwood, R.; McKeown, N. The controller placement problem. ACM SIGCOMM Comput. Commun. Rev. 2012, 42, 473–478. [Google Scholar] [CrossRef] [Green Version]
- Aly, W.H.F. Controller adaptive load balancing for SDN networks. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 514–519. [Google Scholar]
- Schmid, S.; Suomela, J. Exploiting locality in distributed SDN control. In Proceedings of the Second ACM SIGCOMM Workshop on Hot Topics in Software Defined Networking, Hong Kong, China, 16 August 2013; pp. 121–126. [Google Scholar]
- Gao, C.; Wang, H.; Zhu, F.; Zhai, L.; Yi, S. A particle swarm optimization algorithm for controller placement problem in software defined network. In Proceedings of the International Conference on Algorithms and Architectures for Parallel Processing, Zhangjiajie, China, 18–20 November 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 44–54. [Google Scholar]
- Dixit, A.; Hao, F.; Mukherjee, S.; Lakshman, T.; Kompella, R. Towards an elastic distributed SDN controller. ACM SIGCOMM Comput. Commun. Rev. 2013, 43, 7–12. [Google Scholar] [CrossRef]
- Kanj, H.; Flaus, J.M. An Agent-based framework for mitigating hazardous materials transport risk. In Proceedings of the 2015 IEEE International Conference on Evolving and Adaptive Intelligent Systems (EAIS), Douai, France, 1–3 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–8. [Google Scholar]
- Gupta, D.; Jahan, R. Inter-SDN Controller Communication: Using Border Gateway Protocol; White Paper; Tata Consultancy Services (TCS): Mumbai, India, 2014. [Google Scholar]
- Casado, M.; Freedman, M.J.; Pettit, J.; Luo, J.; McKeown, N.; Shenker, S. Ethane: Taking control of the enterprise. ACM SIGCOMM Comput. Commun. Rev. 2007, 37, 1–12. [Google Scholar] [CrossRef]
- Ng, E.; Cai, Z.; Cox, A. Maestro: A System for Scalable Openflow Control; Rice University: Houston, TX, USA, 2010. [Google Scholar]
- Kanj, H.; Flaus, J.M. A simulation approach for risk modeling and analysis based on multi-agents. In Proceedings of the ESREL 2015 25th European Safety and Reliability Conference, Zurich, Switzerland, 7–10 September 2015. [Google Scholar]
- Sherwood, R.; Kok-Kiong, Y. Cbench: An open-FLOW Controller Benchmarker. 2010. Available online: http://archive.openflow.org/wk/index.php/Oflops (accessed on 28 February 2011).
- Kanj, H. Contribution to Risk Analysis Related to the Transport of Hazardous Materials by Agent-Based Simulation. Ph.D. Thesis, Université Grenoble Alpes, Saint-Martin-d’Hères, France, 2016. [Google Scholar]
- Alowa, A.; Fevens, T.; Khamayseh, Y. Survival backup strategy for controller placement problem in Software Defined Networking. Comput. Commun. 2022, 185, 104–117. [Google Scholar] [CrossRef]
- Mojez, H.; Bidgoli, A.M.; Javadi, H.H.S. Star capacity-aware latency-based next controller placement problem with considering single controller failure in software-defined wide-area networks. J. Supercomput. 2022, 78, 13205–13244. [Google Scholar] [CrossRef]
- Shirmarz, A.; Ghaffari, A. Taxonomy of controller placement problem (CPP) optimization in Software Defined Network (SDN): A survey. J. Ambient Intell. Humaniz. Comput. 2021, 12, 10473–10498. [Google Scholar] [CrossRef]
- Aly, W.H.F. A New Controller Placement Technique using Colored Petri-Nets Modelling for SDNs. In Proceedings of the 2020 IEEE Intl Conf on Parallel & Distributed Processing with Applications, Big Data & Cloud Computing, Sustainable Computing & Communications, Social Computing & Networking (ISPA/BDCloud/SocialCom/SustainCom), Exeter, UK, 17–19 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 941–947. [Google Scholar]
- Aly, W.H.F. A Novel Controller Placement Technique for SDNs using Petri-Nets. In Proceedings of the 2020 PMU International Conference on Industrial Revolution 4.0 in Computing, Mobility, and Manufacturing (CMM 2020), Al Khobar, Saudi Arabia, 8–10 December 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Aly, W.H.F.; Kanj, H.; Mostafa, N.; Alabed, S. Feedback ARMA Models versus Bayesian Models towards Securing OpenFlow Controllers for SDNs. Electronics 2022, 11, 1513. [Google Scholar] [CrossRef]
- Agborubere, B.; Sanchez-Velazquez, E. Openflow communications and tls security in software-defined networks. In Proceedings of the 2017 IEEE International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Exeter, UK, 21–23 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 560–566. [Google Scholar]
- Hu, Y.N.; Wang, W.D.; Gong, X.Y.; Que, X.R.; Cheng, S.D. On the placement of controllers in software-defined networks. J. China Univ. Posts Telecommun. 2012, 19, 92–171. [Google Scholar] [CrossRef]
- Guo, M.; Bhattacharya, P. Controller placement for improving resilience of software-defined networks. In Proceedings of the 2013 Fourth International Conference on Networking and Distributed Computing, Los Angeles, CA, USA, 21–24 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 23–27. [Google Scholar]
- Nickel, S.; Steinhardt, C.; Schlenker, H.; Burkart, W.; Reuter-Oppermann, M. Ibm ilog cplex optimization studio. In Angewandte Optimierung Mit IBM ILOG CPLEX Optimization Studio; Springer: Berlin/Heidelberg, Germany, 2021; pp. 9–23. [Google Scholar]
- Sallahi, A.; St-Hilaire, M. Expansion model for the controller placement problem in software defined networks. IEEE Commun. Lett. 2016, 21, 274–277. [Google Scholar] [CrossRef]
- Bari, M.F.; Roy, A.R.; Chowdhury, S.R.; Zhang, Q.; Zhani, M.F.; Ahmed, R.; Boutaba, R. Dynamic controller provisioning in software defined networks. In Proceedings of the 9th International Conference on Network and Service Management (CNSM 2013), Zurich, Switzerland, 14–18 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 18–25. [Google Scholar]
- Cheng, T.Y.; Wang, M.; Jia, X. QoS-guaranteed controller placement in SDN. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–6. [Google Scholar]
- Liu, J.; Liu, J.; Xie, R. Reliability-based controller placement algorithm in software defined networking. Comput. Sci. Inf. Syst. 2016, 13, 547–560. [Google Scholar] [CrossRef]
- Yao, L.; Hong, P.; Zhang, W.; Li, J.; Ni, D. Controller placement and flow based dynamic management problem towards SDN. In Proceedings of the 2015 IEEE International Conference on Communication Workshop (ICCW), London, UK, 8–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 363–368. [Google Scholar]
- Xiao, P.; Li, Z.Y.; Guo, S.; Qi, H.; Qu, W.Y.; Yu, H.S. AK self-adaptive SDN controller placement for wide area networks. Front. Inf. Technol. Electron. Eng. 2016, 17, 620–633. [Google Scholar] [CrossRef] [Green Version]
- Cheng, G.; Chen, H.; Hu, H.; Lan, J. Dynamic switch migration towards a scalable SDN control plane. Int. J. Commun. Syst. 2016, 29, 1482–1499. [Google Scholar] [CrossRef]
- Hock, D.; Gebert, S.; Hartmann, M.; Zinner, T.; Tran-Gia, P. POCO-framework for Pareto-optimal resilient controller placement in SDN-based core networks. In Proceedings of the 2014 IEEE Network Operations and Management Symposium (NOMS), Krakow, Poland, 5–9 May 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–2. [Google Scholar]
- Lange, S.; Gebert, S.; Zinner, T.; Tran-Gia, P.; Hock, D.; Jarschel, M.; Hoffmann, M. Heuristic approaches to the controller placement problem in large scale SDN networks. IEEE Trans. Netw. Serv. Manag. 2015, 12, 4–17. [Google Scholar] [CrossRef]
- Perrot, N.; Reynaud, T. Optimal placement of controllers in a resilient SDN architecture. In Proceedings of the 2016 12th International Conference on the Design of Reliable Communication Networks (DRCN), Paris, France, 15–17 March 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 145–151. [Google Scholar]
- Hu, Y.; Luo, T.; Beaulieu, N.C.; Deng, C. The energy-aware controller placement problem in software defined networks. IEEE Commun. Lett. 2016, 21, 741–744. [Google Scholar] [CrossRef]
- Liao, J.; Sun, H.; Wang, J.; Qi, Q.; Li, K.; Li, T. Density cluster based approach for controller placement problem in large-scale software defined networkings. Comput. Netw. 2017, 112, 24–35. [Google Scholar] [CrossRef]
- Hock, D.; Hartmann, M.; Gebert, S.; Jarschel, M.; Zinner, T.; Tran-Gia, P. Pareto-optimal resilient controller placement in SDN-based core networks. In Proceedings of the 2013 25th International Teletraffic Congress (ITC), Shanghai, China, 10–12 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–9. [Google Scholar]
- Sallahi, A.; St-Hilaire, M. Optimal model for the controller placement problem in software defined networks. IEEE Commun. Lett. 2014, 19, 30–33. [Google Scholar] [CrossRef]
- Sherwood, R.; Gibb, G.; Yap, K.K.; Appenzeller, G.; Casado, M.; McKeown, N.; Parulkar, G. Flowvisor: A network virtualization layer. OpenFlow Switch Consort. Tech. Rep. 2009, 1, 132. [Google Scholar]
- Yao, G.; Bi, J.; Li, Y.; Guo, L. On the capacitated controller placement problem in software defined networks. IEEE Commun. Lett. 2014, 18, 1339–1342. [Google Scholar] [CrossRef]
- Jalili, A.; Ahmadi, V.; Keshtgari, M.; Kazemi, M. Controller placement in software-defined WAN using multi objective genetic algorithm. In Proceedings of the 2015 2nd International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 5–6 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 656–662. [Google Scholar]
- Mohanty, S.; Shekhawat, A.S.; Sahoo, B.; Apat, H.K.; Khare, P. Minimizing Latency for Controller Placement Problem in SDN. In Proceedings of the 2021 19th OITS International Conference on Information Technology (OCIT), Bhubaneswar, India, 16–18 December 2021; pp. 393–398. [Google Scholar] [CrossRef]
- Huang, V.; Chen, G.; Fu, Q.; Wen, E. Optimizing Controller Placement for Software-Defined Networks. In Proceedings of the 2019 IFIP/IEEE Symposium on Integrated Network and Service Management (IM), Washington DC, USA, 8–12 April 2019; pp. 224–232. [Google Scholar]
- Tao, P.; Ying, C.; Sun, Z.; Tan, S.; Wang, P.; Sun, Z. The Controller Placement of Software-Defined Networks Based on Minimum Delay and Load Balancing. In Proceedings of the 2018 IEEE 16th Intl Conf on Dependable, Autonomic and Secure Computing, 16th Intl Conf on Pervasive Intelligence and Computing, 4th Intl Conf on Big Data Intelligence and Computing and Cyber Science and Technology Congress(DASC/PiCom/DataCom/CyberSciTech), Athens, Greece, 12–15 August 2018; pp. 310–313. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, S.; Zhang, S.; Huang, Y.; Fan, K. A filter algorithm based on ARMA model to suppress the influence of atmospheric disturbance in laser straightness measurement. In Proceedings of the Tenth International Symposium on Precision Engineering Measurements and Instrumentation, Kunming, China, 8–10 August 2018; SPIE: Bellingham, DC, USA, 2019; Volume 11053, pp. 667–675. [Google Scholar]
- Knight, S.; Nguyen, H.X.; Falkner, N.; Bowden, R.; Roughan, M. The internet topology zoo. IEEE J. Sel. Areas Commun. 2011, 29, 1765–1775. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 0.7 | 0.2 | 0.1 |
| 2 | 0.1 | 0.7 | 0.2 |
| 3 | 0.2 | 0.7 | 0.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aly, W.H.F.; Kanj, H.; Alabed, S.; Mostafa, N.; Safi, K. Dynamic Feedback versus Varna-Based Techniques for SDN Controller Placement Problems. Electronics 2022, 11, 2273. https://doi.org/10.3390/electronics11142273
Aly WHF, Kanj H, Alabed S, Mostafa N, Safi K. Dynamic Feedback versus Varna-Based Techniques for SDN Controller Placement Problems. Electronics. 2022; 11(14):2273. https://doi.org/10.3390/electronics11142273
Chicago/Turabian StyleAly, Wael Hosny Fouad, Hassan Kanj, Samer Alabed, Nour Mostafa, and Khaled Safi. 2022. "Dynamic Feedback versus Varna-Based Techniques for SDN Controller Placement Problems" Electronics 11, no. 14: 2273. https://doi.org/10.3390/electronics11142273
APA StyleAly, W. H. F., Kanj, H., Alabed, S., Mostafa, N., & Safi, K. (2022). Dynamic Feedback versus Varna-Based Techniques for SDN Controller Placement Problems. Electronics, 11(14), 2273. https://doi.org/10.3390/electronics11142273