
Investigation of Achieving Ultrasonic Haptic Feedback Using Piezoelectric Micromachined Ultrasonic Transducer

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
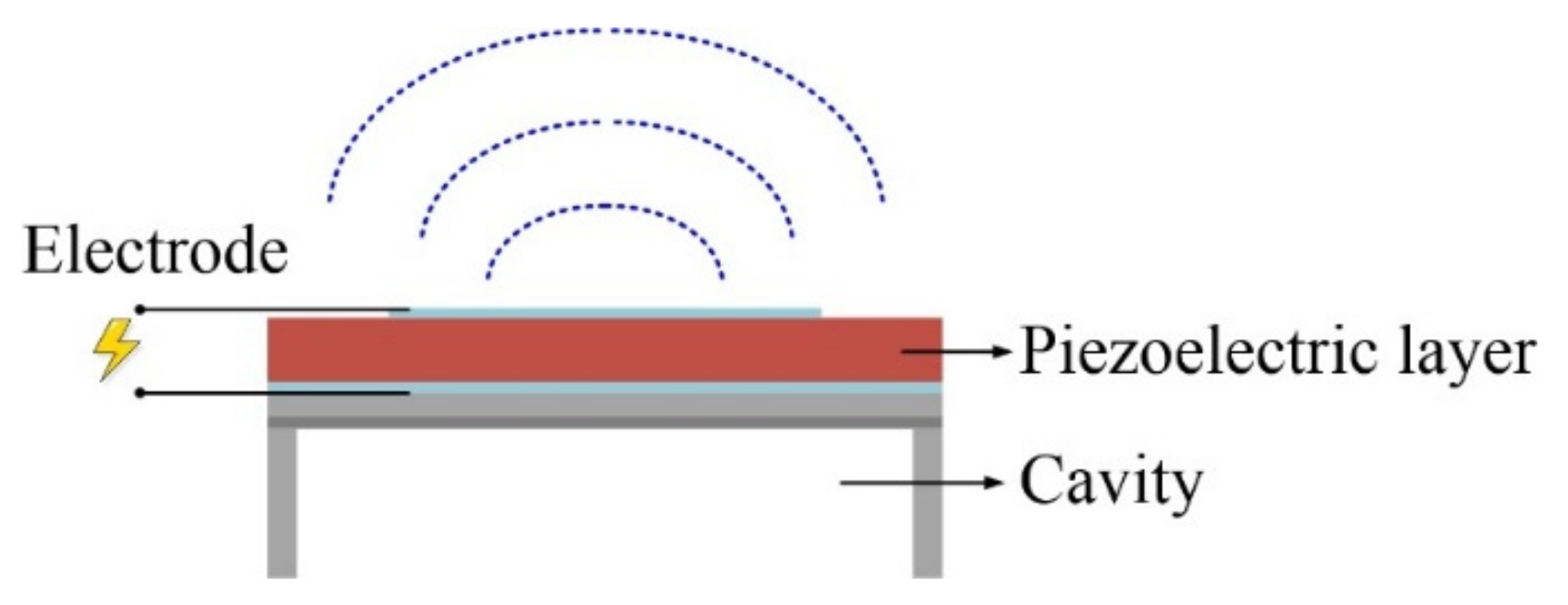
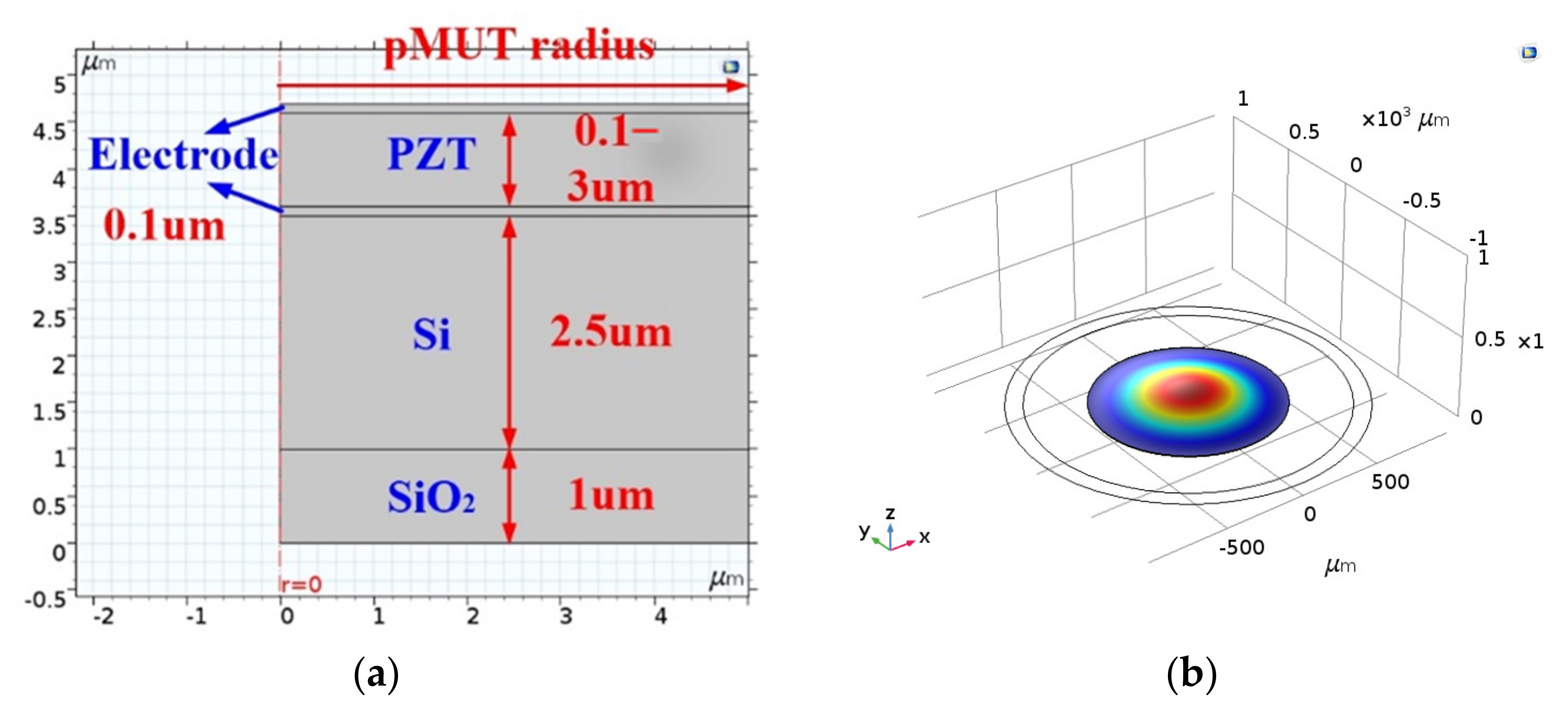
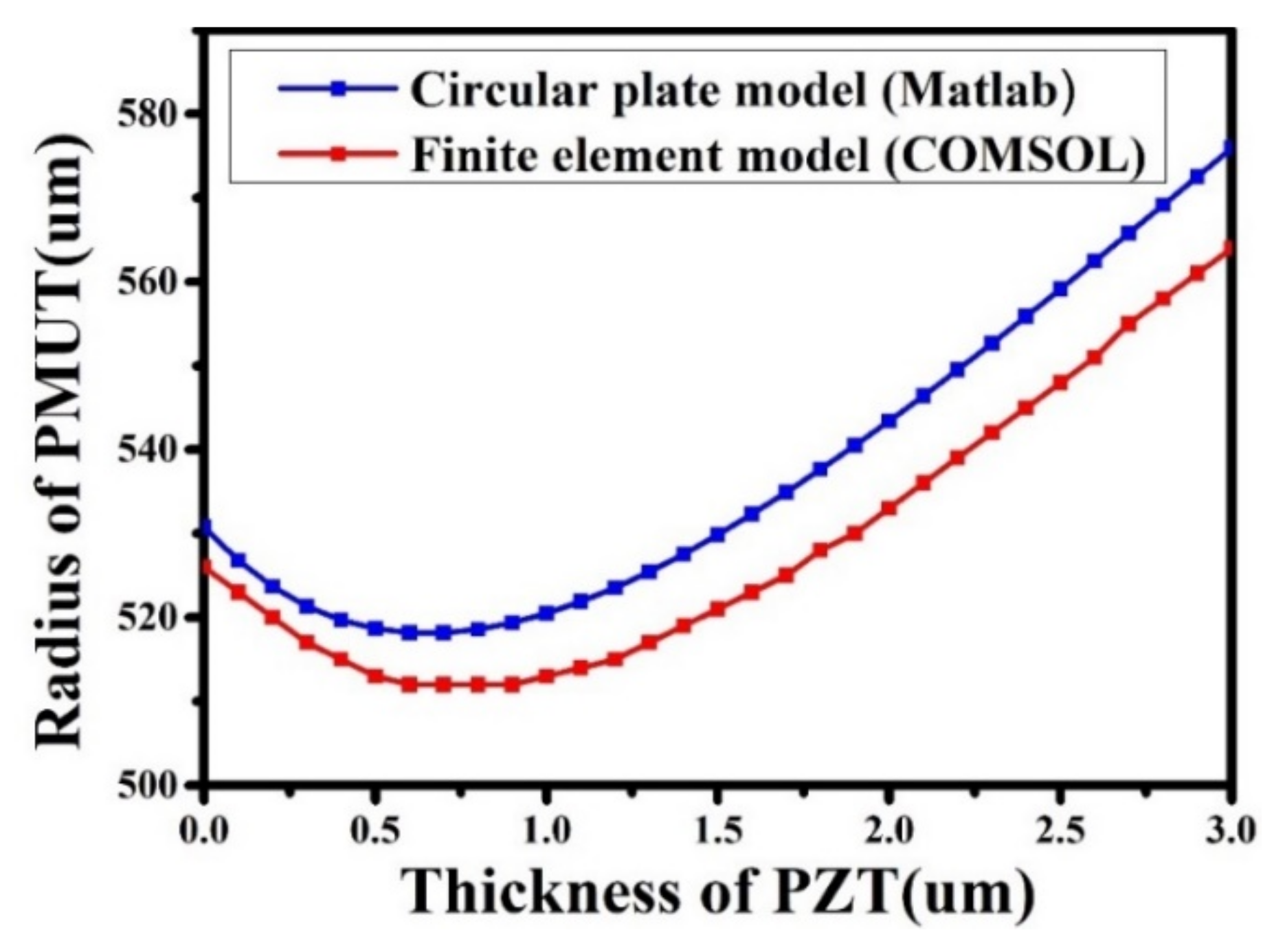
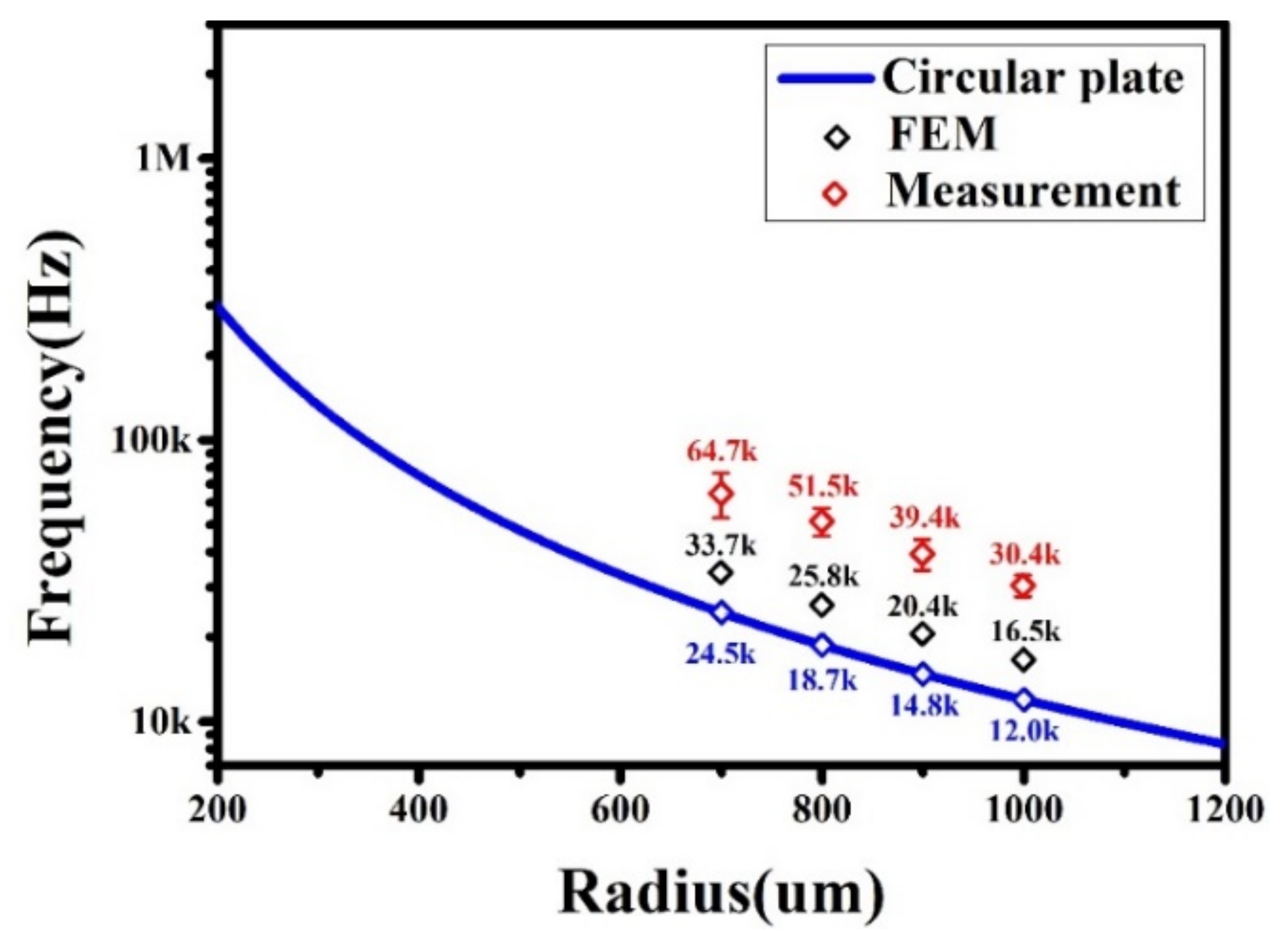
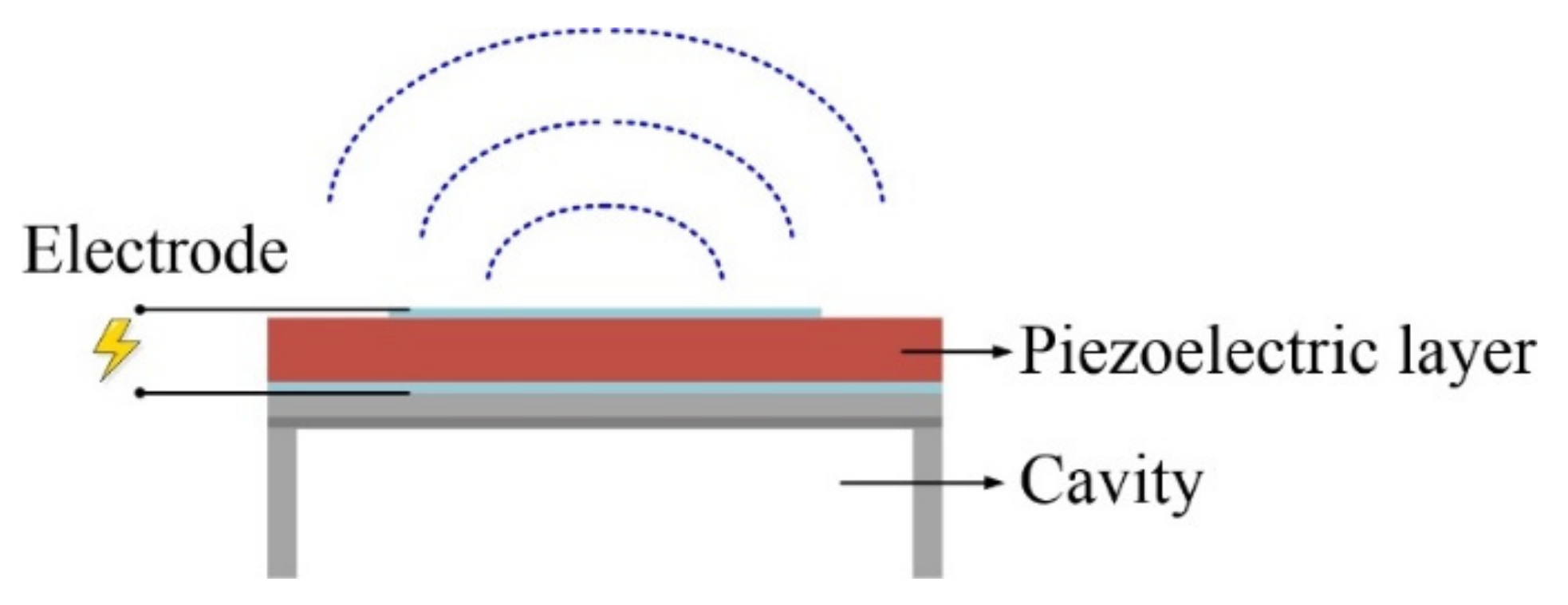
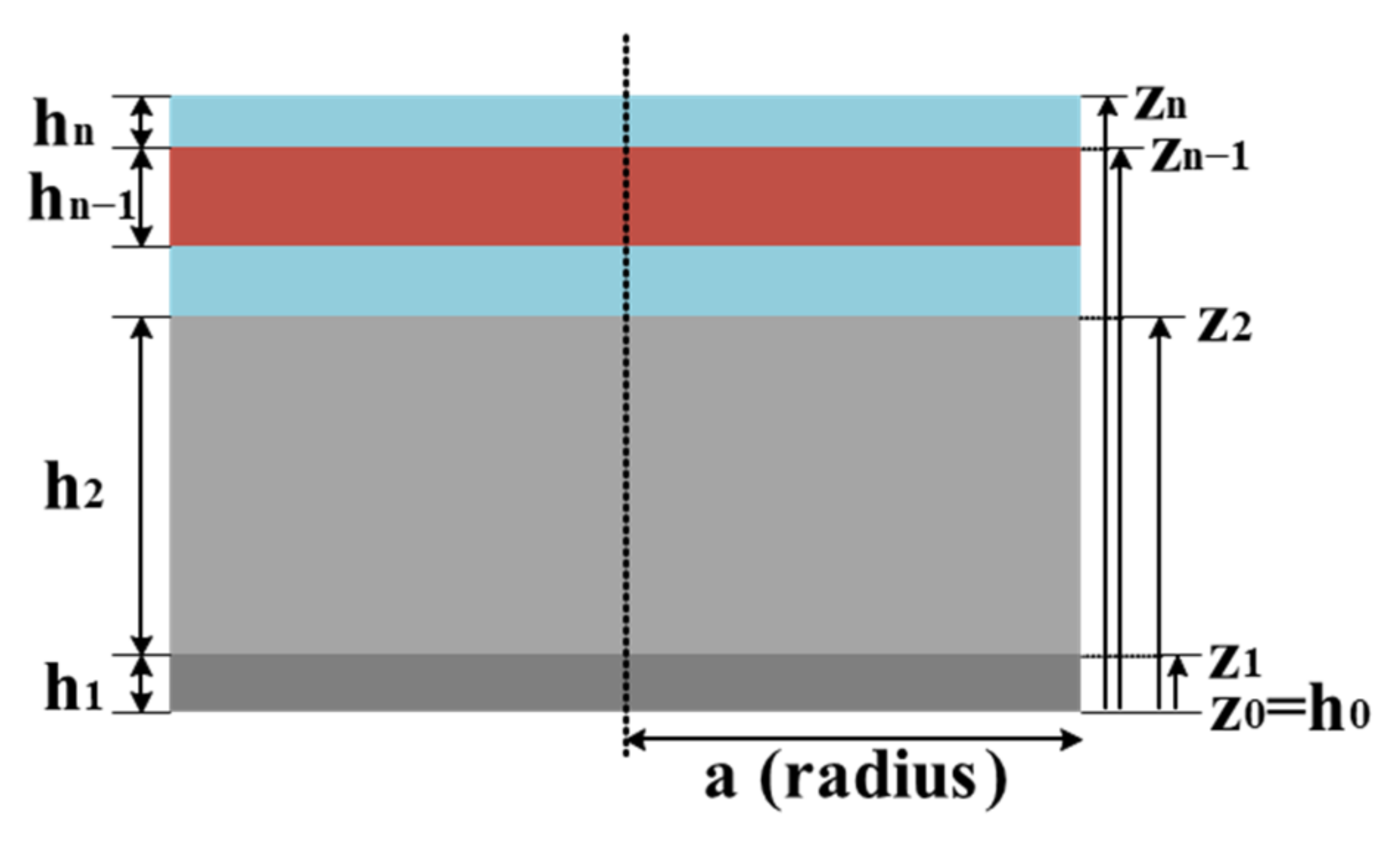
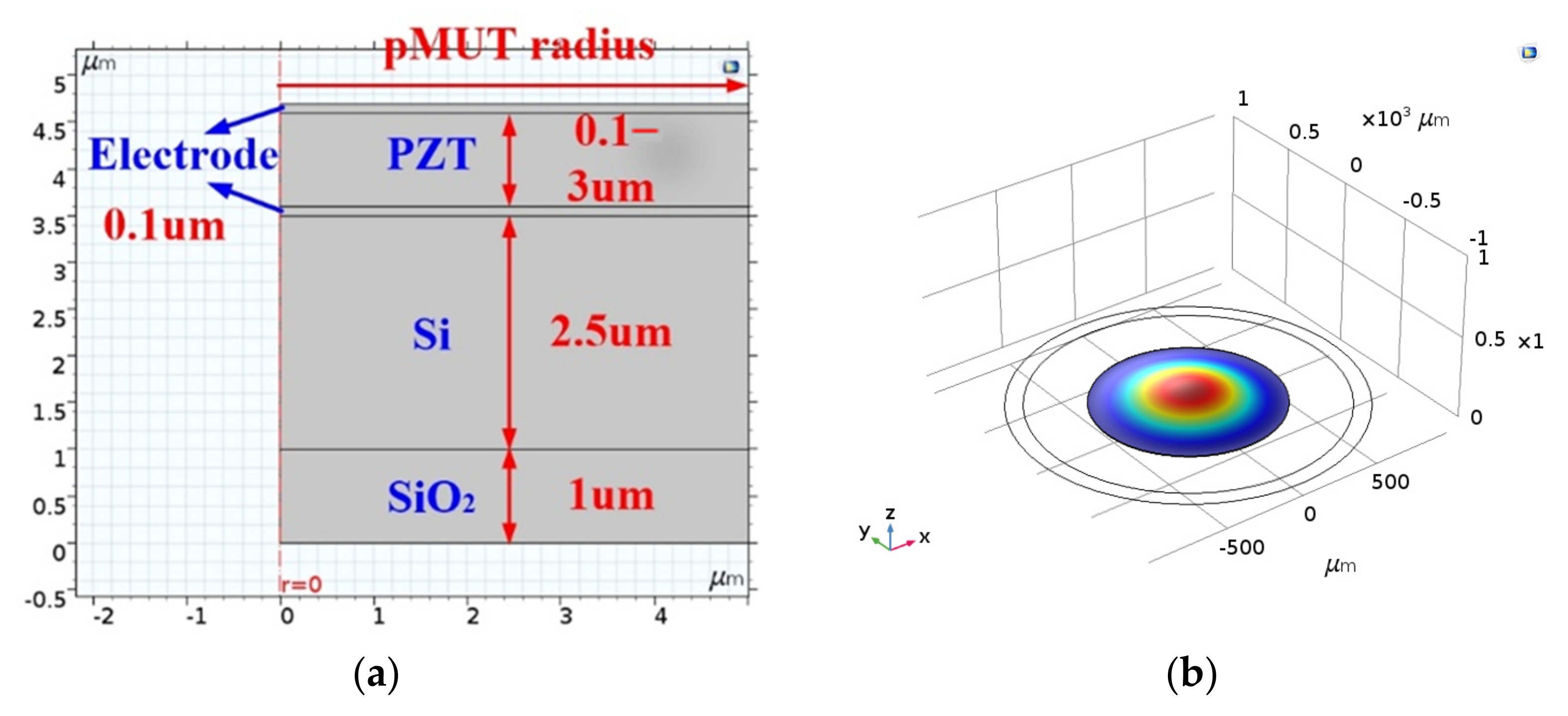
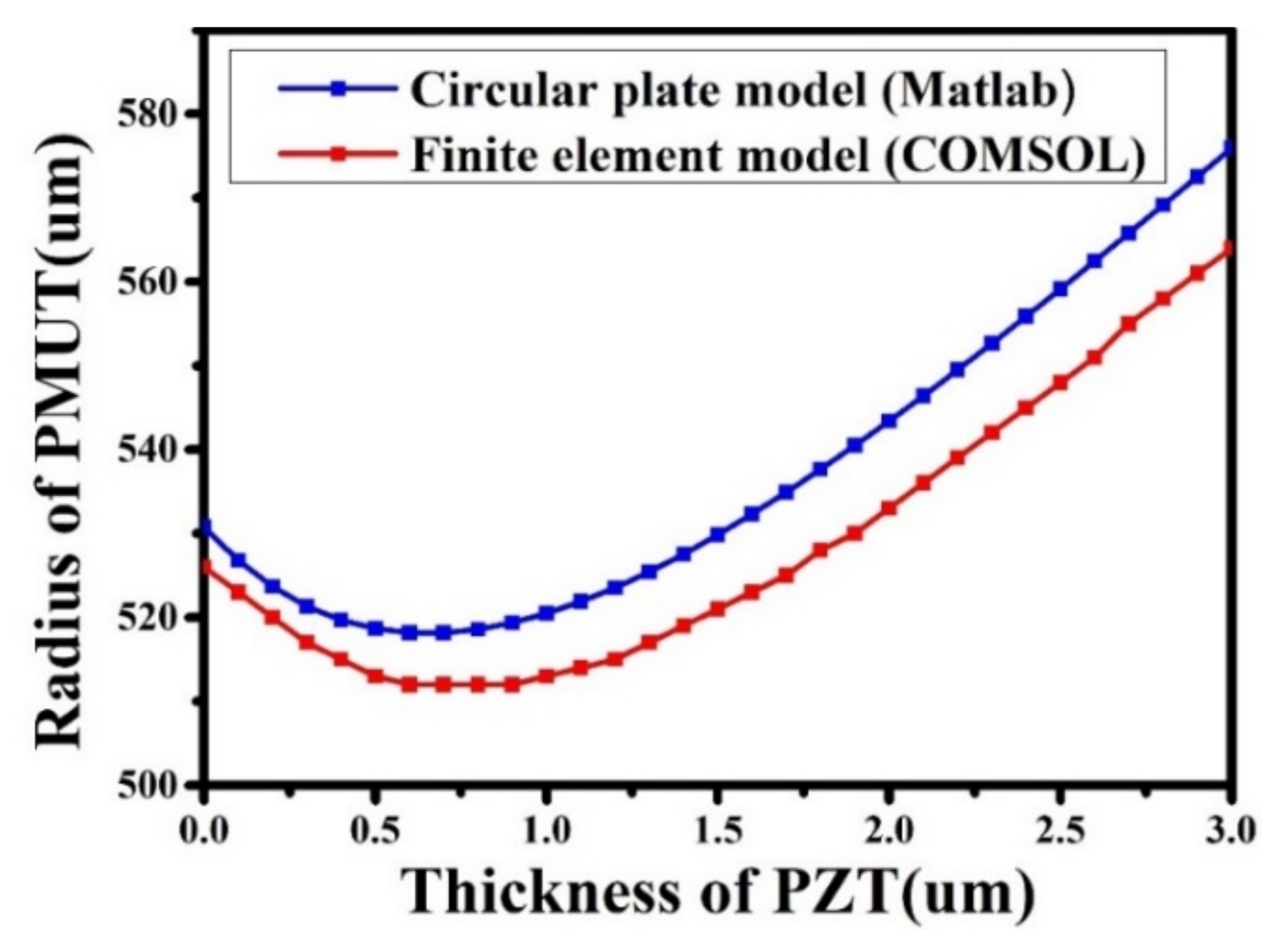
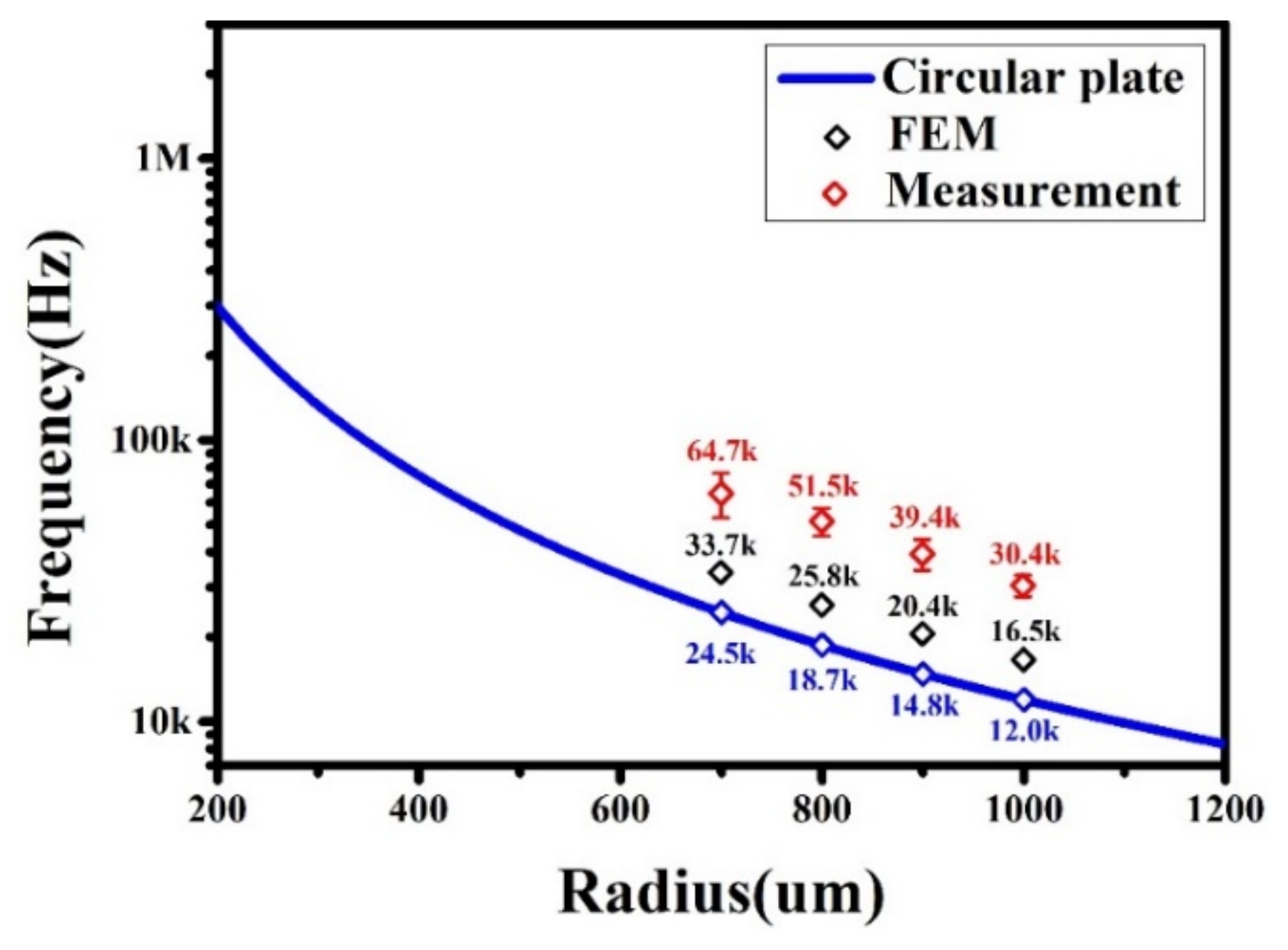
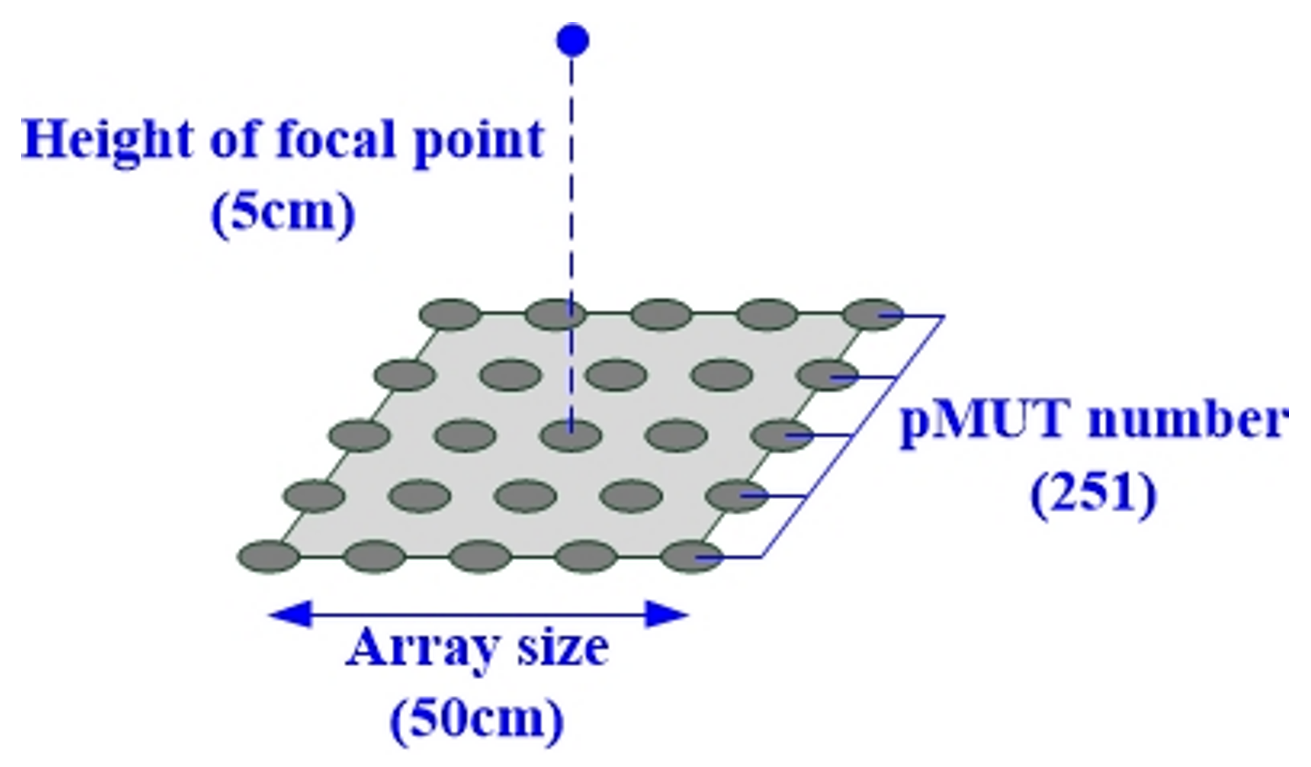
2.1. Design and Simulation of the 40 kHz PZT pMUT
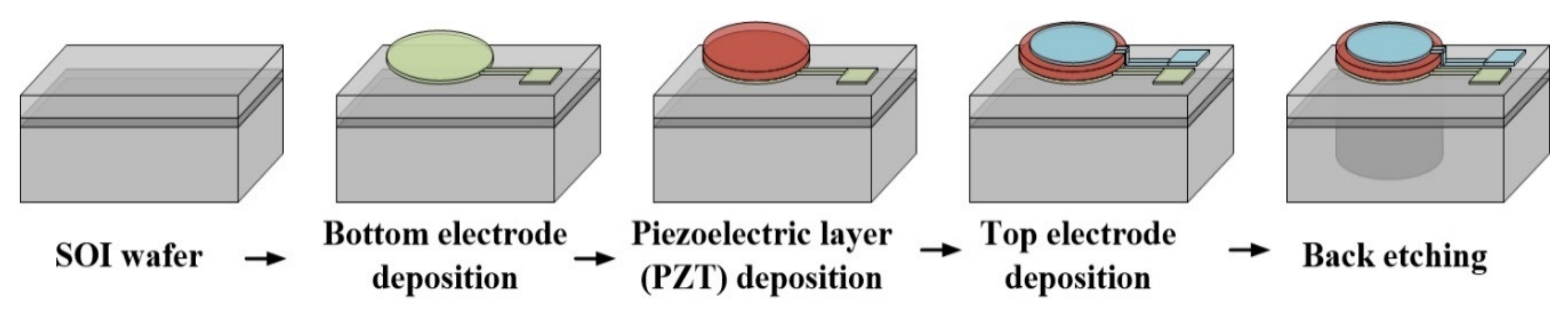
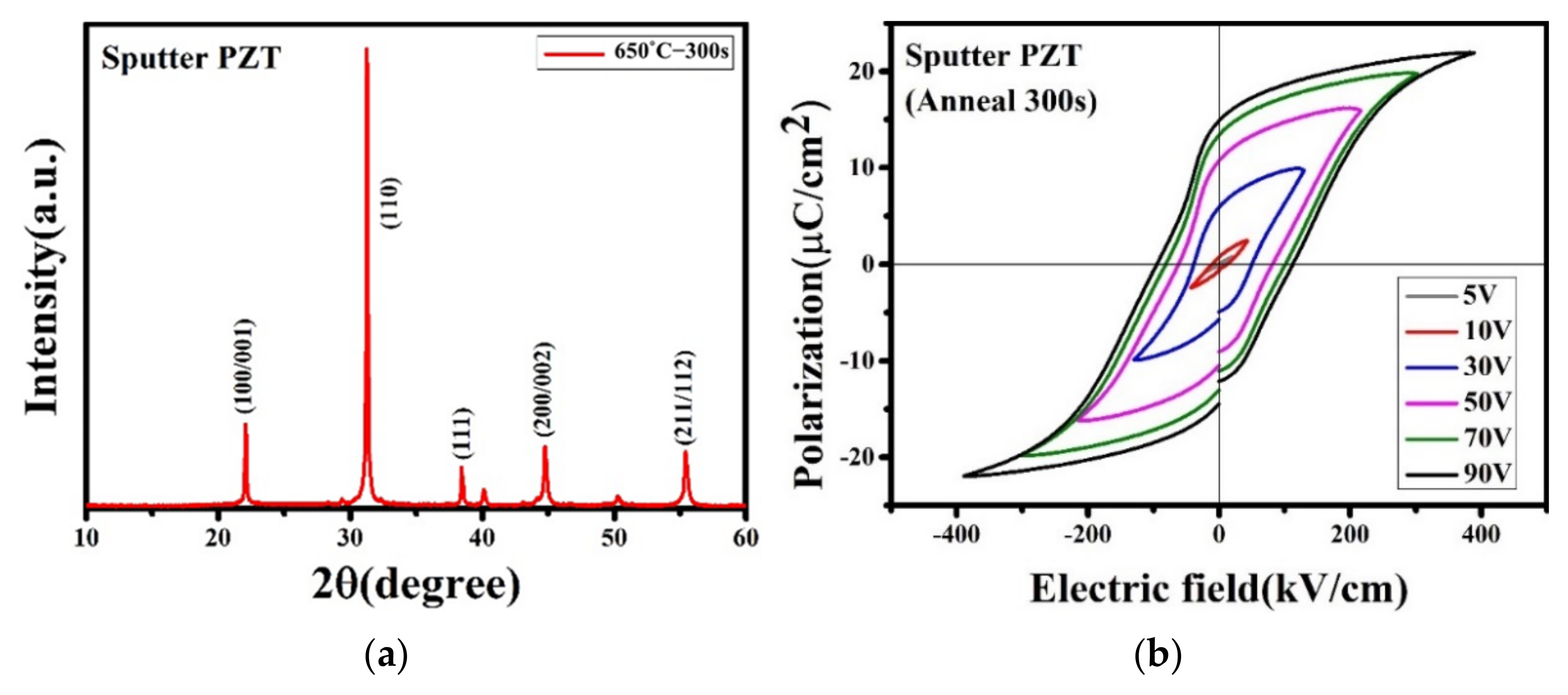
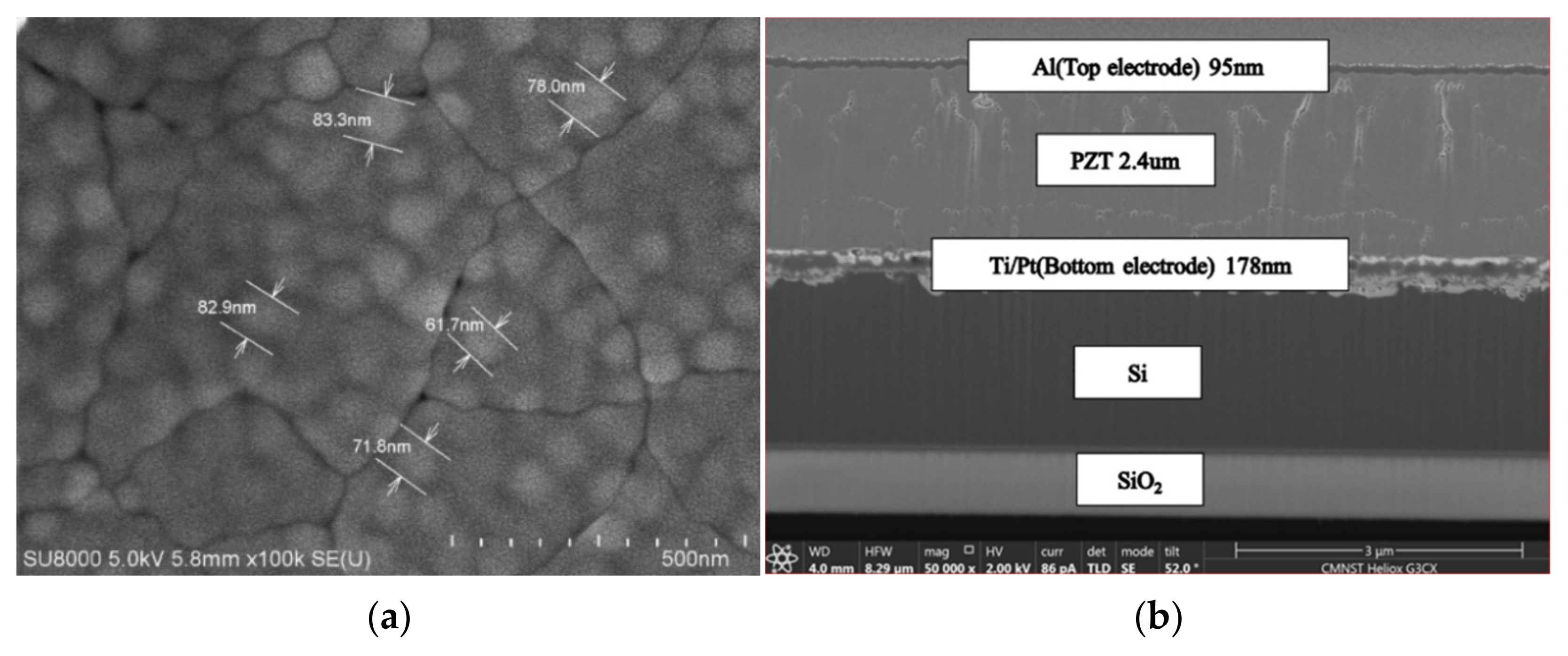
2.2. Fabrication and Analysis of the PZT pMUT
3. Results and Discussion
3.1. Device Characteristics
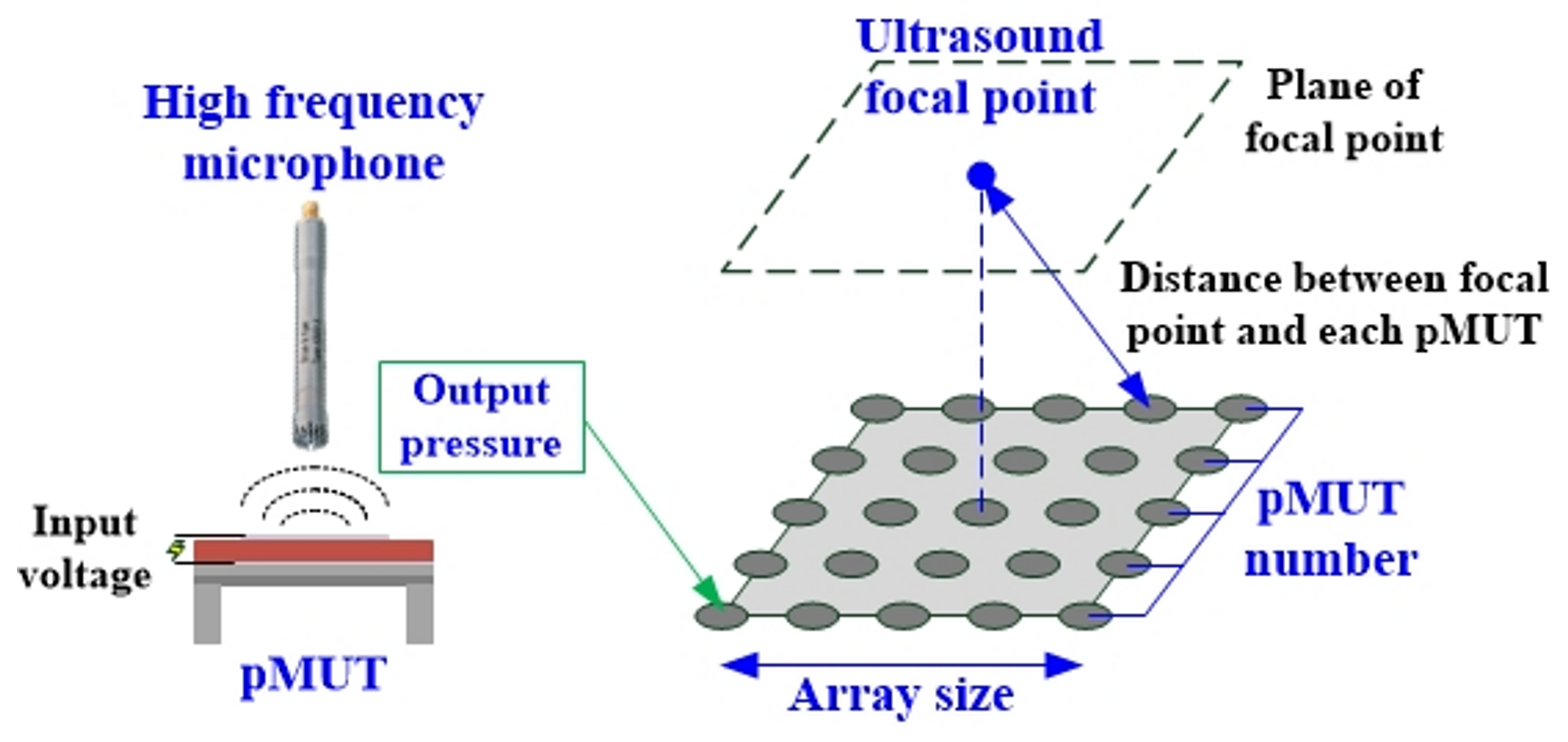
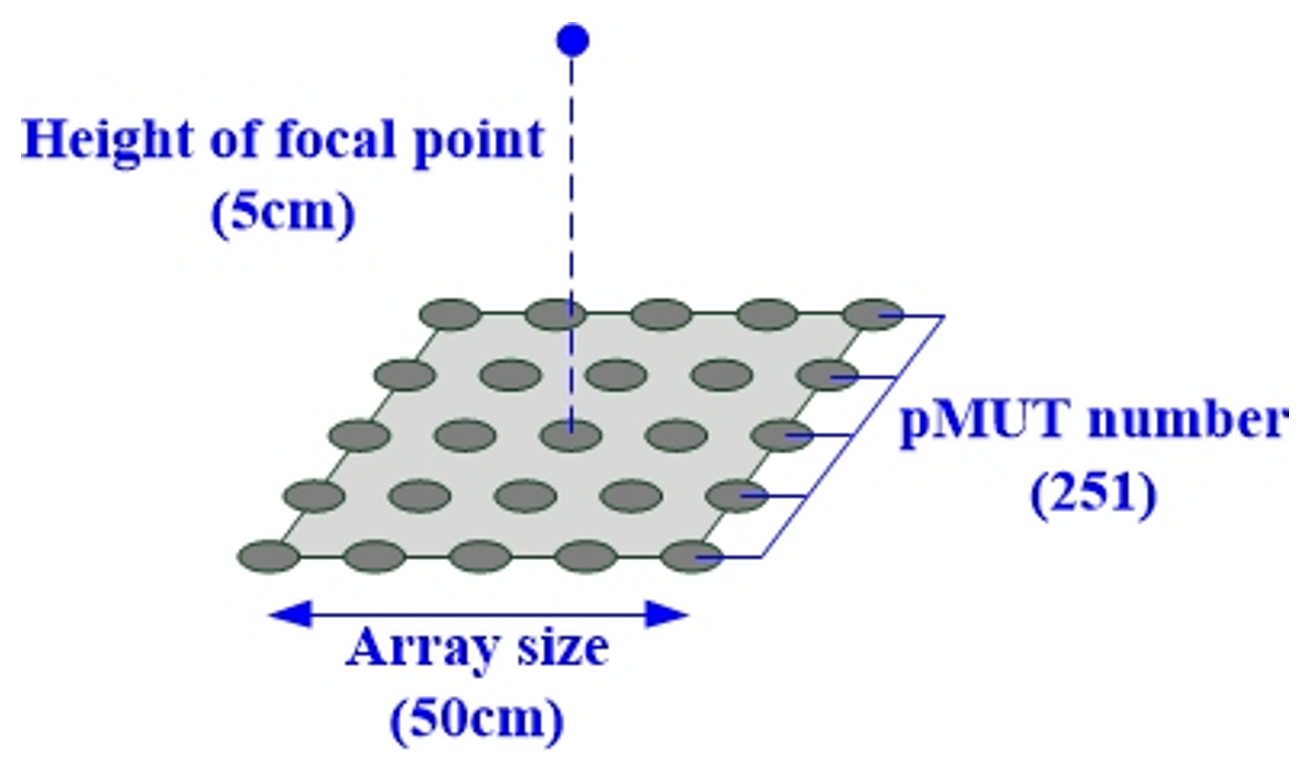
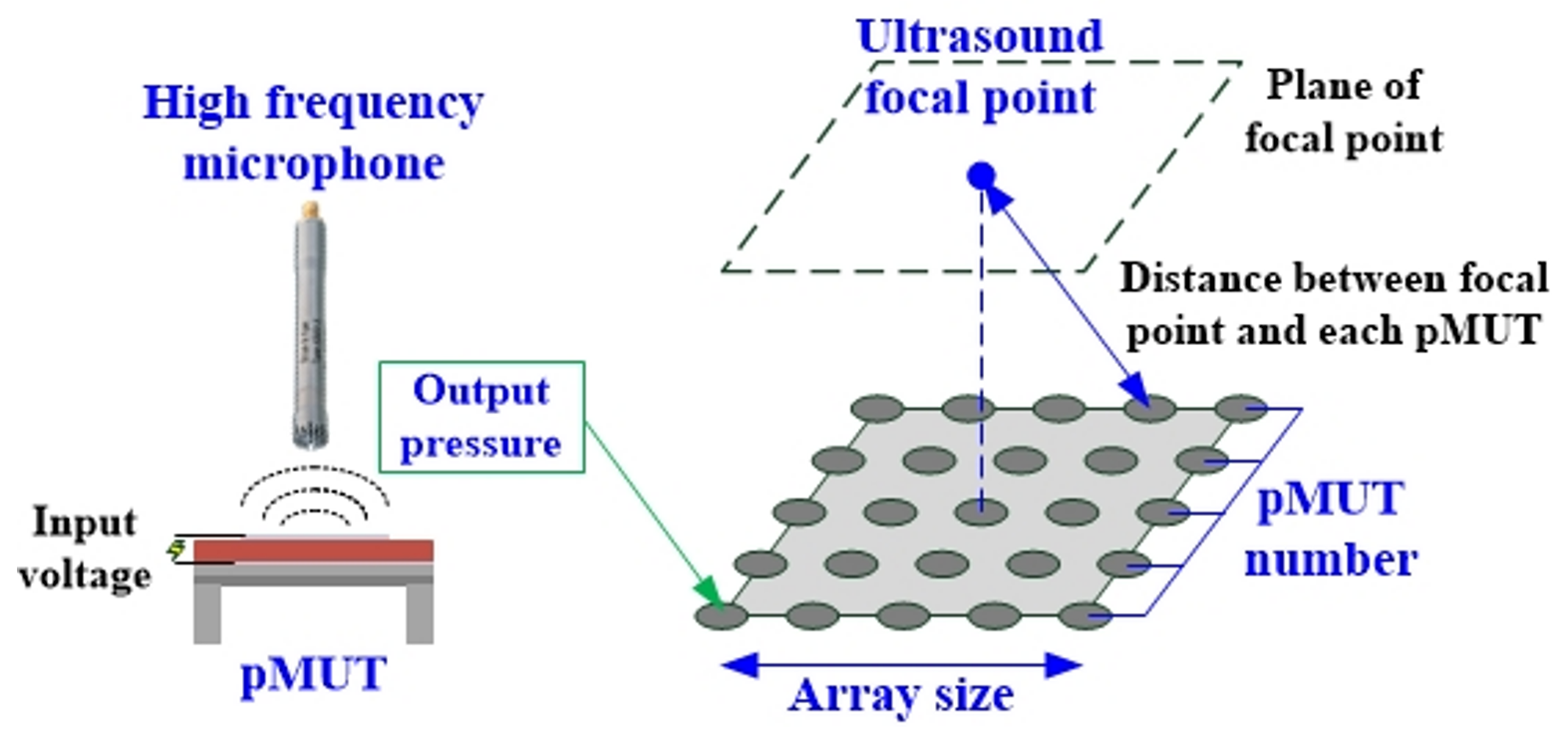
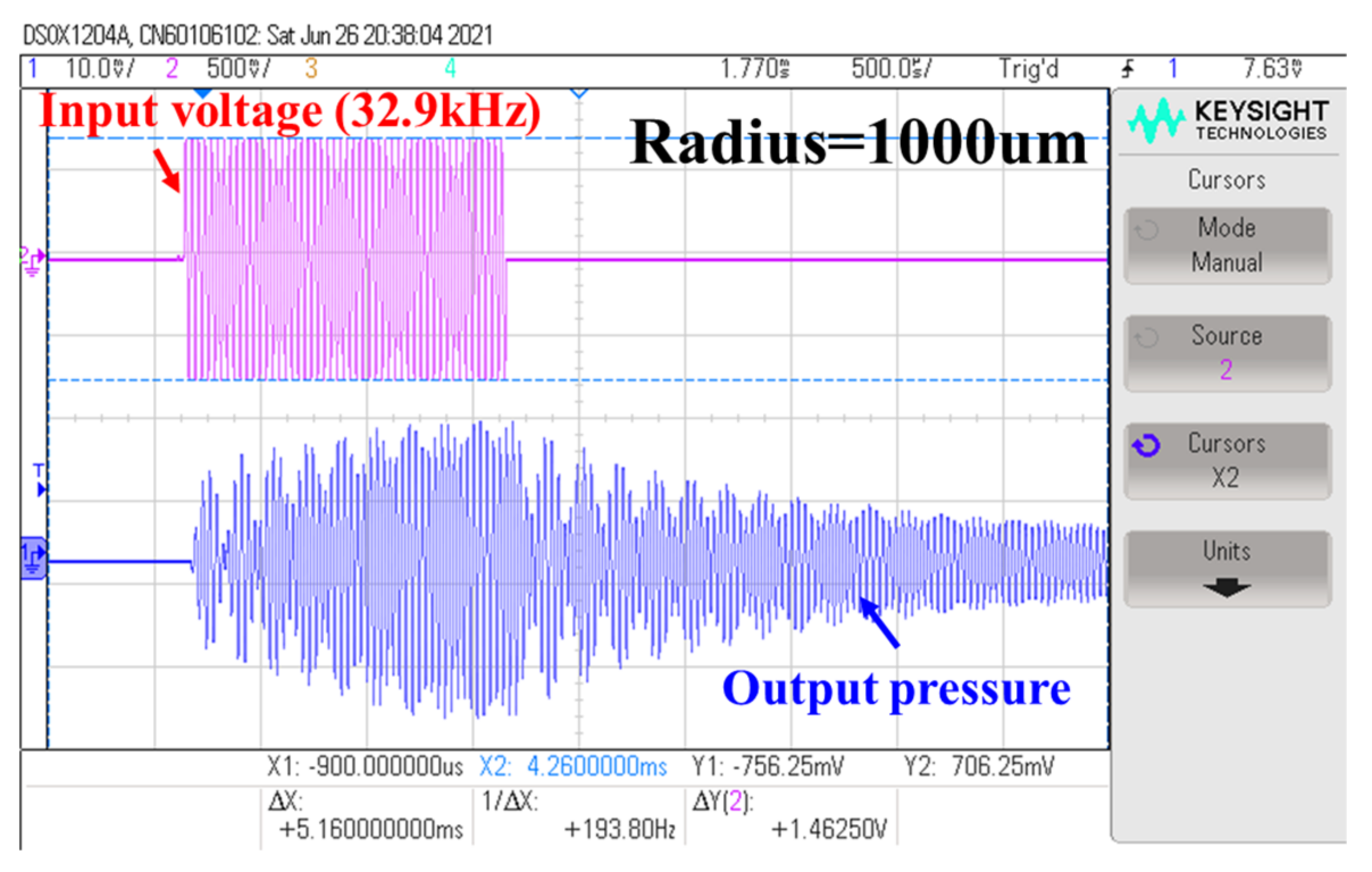
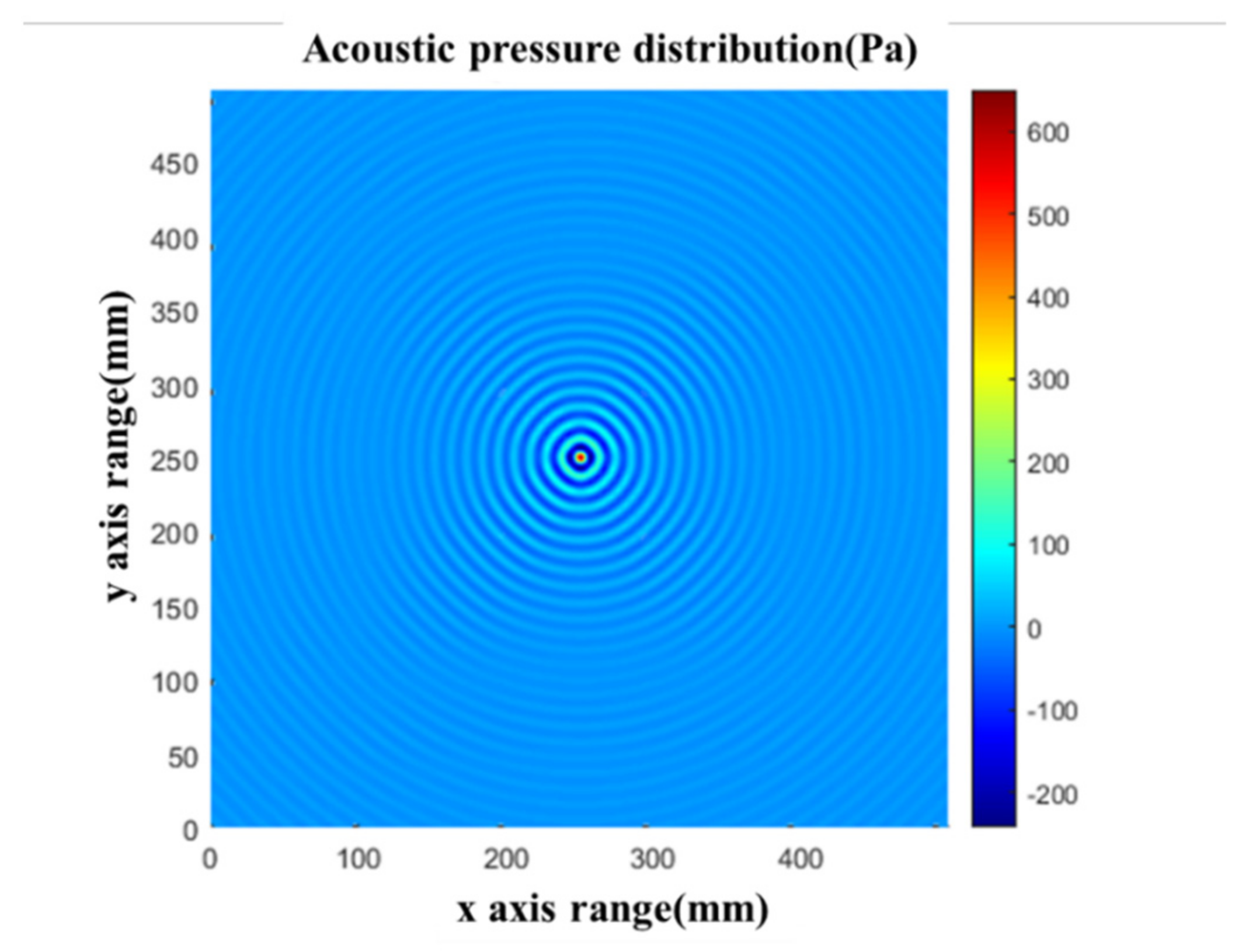
3.2. Acoustic Characteristics
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Carter, T.; Seah, S.A.; Long, B.; Drinkwater, B.; Subramanian, S. UltraHaptics: Multi-point mid-air haptic feedback for touch surfaces. In Proceedings of the 26th Annual ACM Symposium on User Interface Software and Technology, UIST 2013, St. Andrews, UK, 8–11 October 2013; Association for Computing Machinery: New York, NY, USA, 2013; pp. 505–514. [Google Scholar]
- Rakkolainen, I.; Freeman, E.; Sand, A.; Raisamo, R.; Brewster, S. A Survey of Mid-Air Ultrasound Haptics and Its Applications. IEEE Trans. Haptics 2020, 14, 2–19. [Google Scholar] [CrossRef] [PubMed]
- Iwamoto, T.; Tatezono, M.; Shinoda, H. Non-contact method for producing tactile sensation using airborne ultrasound. In Proceedings of the 6th International Conference on Haptics: Perception, Devices and Scenarios, EuroHaptics 2008, Madrid, Spain, 10–13 June 2008; Springer: Berlin/Heidelberg, Germany, 2008. LNCS. Volume 5024, pp. 504–513. [Google Scholar]
- Erguri, A.S.; Huang, Y.; Zhuang, X.; Oralkan, O.; Yarahoglu, G.G.; Khuri-Yakub, B.T. Capacitive micromachined ultrasonic transducers: Fabrication technology. IEEE Trans. Ultrason. 2005, 52, 2242–2258. [Google Scholar] [CrossRef] [PubMed]
- Zahorian, J.; Hochman, M.; Xu, T.; Satir, S.; Gurun, G.; Karaman, M.; Degertekin, F.L. Monolithic CMUT-on-CMOS integration for intravascular ultrasound applications. IEEE Trans. Ultrason. 2011, 58, 2659–2667. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, X.; Lu, Y.; Tang, H.Y.; Tsai, J.M.; Ng, E.J.; Daneman, M.J.; Boser, B.E.; Horsley, D.A. Monolithic ultrasound fingerprint sensor. Microsyst. Nanoeng. 2017, 3, 17059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Qiu, Y.; Gigliotti, J.V.; Wallace, M.; Griggio, F.; Demore, C.E.; Cochran, S.; Trolier-McKinstry, S. Piezoelectric Micromachined Ultrasound Transducer (PMUT) Arrays for Integrated Sensing, Actuation and Imaging. Sensors 2015, 15, 8020–8041. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, H.; Chen, Z.; Yang, H.; Jiang, H.; Xie, H. A Ceramic PZT-Based PMUT Array for Endoscopic Photoacoustic Imaging. J. Microelectromechanical Syst. 2020, 29, 1038–1043. [Google Scholar] [CrossRef] [PubMed]
- Song, R.; Richard, G.; Cheng CY, Y.; Teng, L.; Qiu, Y.; Lavery, M.P.J.; Trolier-Mckinstry, S.; Cochran, S.; Underwood, I. Multi-Channel Signal-Generator ASIC for Acoustic Holograms. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2020, 67, 49–56. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, C.Y.; Dangi, A.; Ren, L.; Tiwari, S.; Benoit, R.R.; Qiu, Y.; Lay, H.S.; Agrawal, S.; Pratap, R.; Kothapalli, S.-R.; et al. Thin Film PZT-Based PMUT Arrays for Deterministic Particle Manipulation. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2019, 66, 1606–1615. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Halbach, A.; Gijsenbergh, P.; Jeong, Y.; Devriese, W.; Gao, H.; Billen, M.; Torri, G.B.; Chare, C.; Cheyns, D.; Rottenberg, X.; et al. Display Compatible PMUT Array for Mid-Air Haptic Feedback. In Proceedings of the 20th International Conference on Solid-State Sensors, Actuators and Microsystems and Eurosensors XXXIII, TRANSDUCERS 2019 and EUROSENSORS XXXIII, Berlin, Germany, 23–27 June 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019; pp. 158–161. [Google Scholar]
- Smyth, K.; Kim, S.-G. Experiment and simulation validated analytical equivalent circuit model for piezoelectric micromachined ultrasonic transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2015, 62, 744–765. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Smyth, K.; Bathurst, S.; Sammoura, F.; Kim, S.-G. Analytic solution for N-electrode actuated piezoelectric disk with application to piezoelectric micromachined ultrasonic transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2013, 60, 1756–1767. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | SiO2 | Si | PZT | Electrode (Al) | Electrode (Pt) |
|---|---|---|---|---|---|
| Young’s modulus (E) (GPa) | 70 | 170 | 61.5 | 70 | 168 |
| Poisson’s ratio (ν) | 0.17 | 0.28 | 0.394 | 0.35 | 0.38 |
| Material’s density (ρ) (kg/m3) | 2200 | 2329 | 7500 | 2700 | 21,450 |
| Layer thickness (h) (μm) | 1 | 2.5 | 0.1–3 | 0.1 | 0.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.-H.; Su, H.-Y.; Lin, H.-C.; Li, C.-Y.; Wang, Y.-H.; Huang, C.-H. Investigation of Achieving Ultrasonic Haptic Feedback Using Piezoelectric Micromachined Ultrasonic Transducer. Electronics 2022, 11, 2131. https://doi.org/10.3390/electronics11142131
Liu Y-H, Su H-Y, Lin H-C, Li C-Y, Wang Y-H, Huang C-H. Investigation of Achieving Ultrasonic Haptic Feedback Using Piezoelectric Micromachined Ultrasonic Transducer. Electronics. 2022; 11(14):2131. https://doi.org/10.3390/electronics11142131
Chicago/Turabian StyleLiu, Ya-Han, Hsin-Yi Su, Hsiao-Chi Lin, Chih-Ying Li, Yeong-Her Wang, and Chih-Hsien Huang. 2022. "Investigation of Achieving Ultrasonic Haptic Feedback Using Piezoelectric Micromachined Ultrasonic Transducer" Electronics 11, no. 14: 2131. https://doi.org/10.3390/electronics11142131
APA StyleLiu, Y.-H., Su, H.-Y., Lin, H.-C., Li, C.-Y., Wang, Y.-H., & Huang, C.-H. (2022). Investigation of Achieving Ultrasonic Haptic Feedback Using Piezoelectric Micromachined Ultrasonic Transducer. Electronics, 11(14), 2131. https://doi.org/10.3390/electronics11142131