
Inhibiting Oil Splitting and Backflow in Electrowetting Displays by Designing a Power Function Driving Waveform


Abstract
:1. Introduction
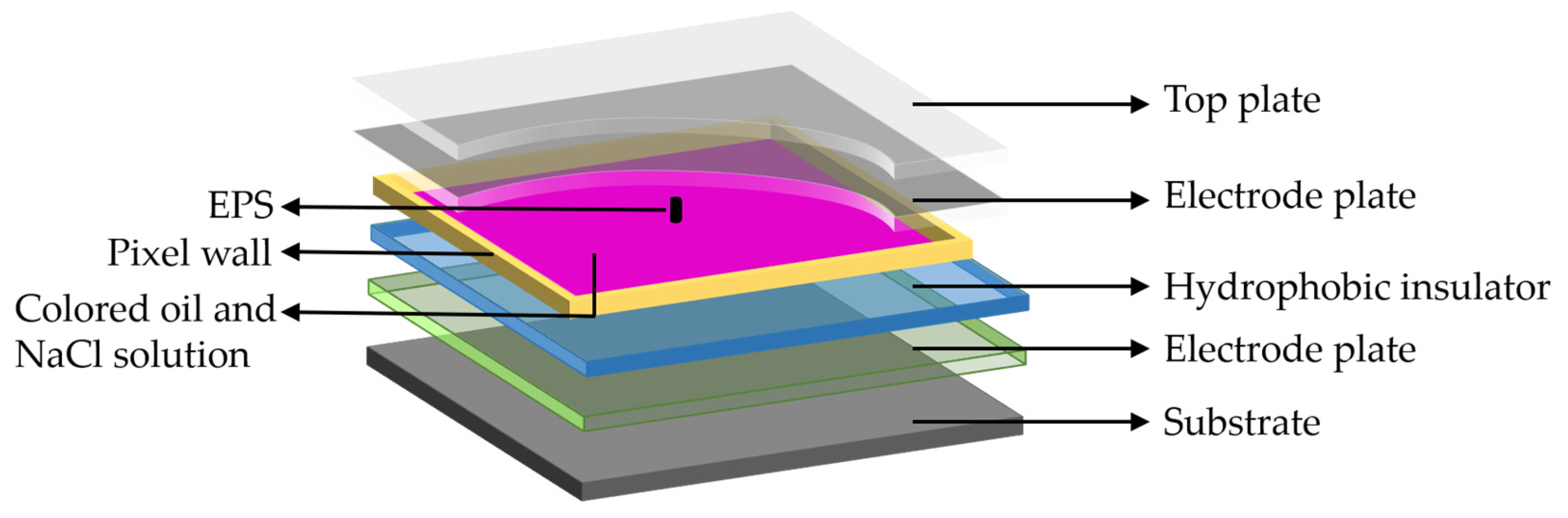
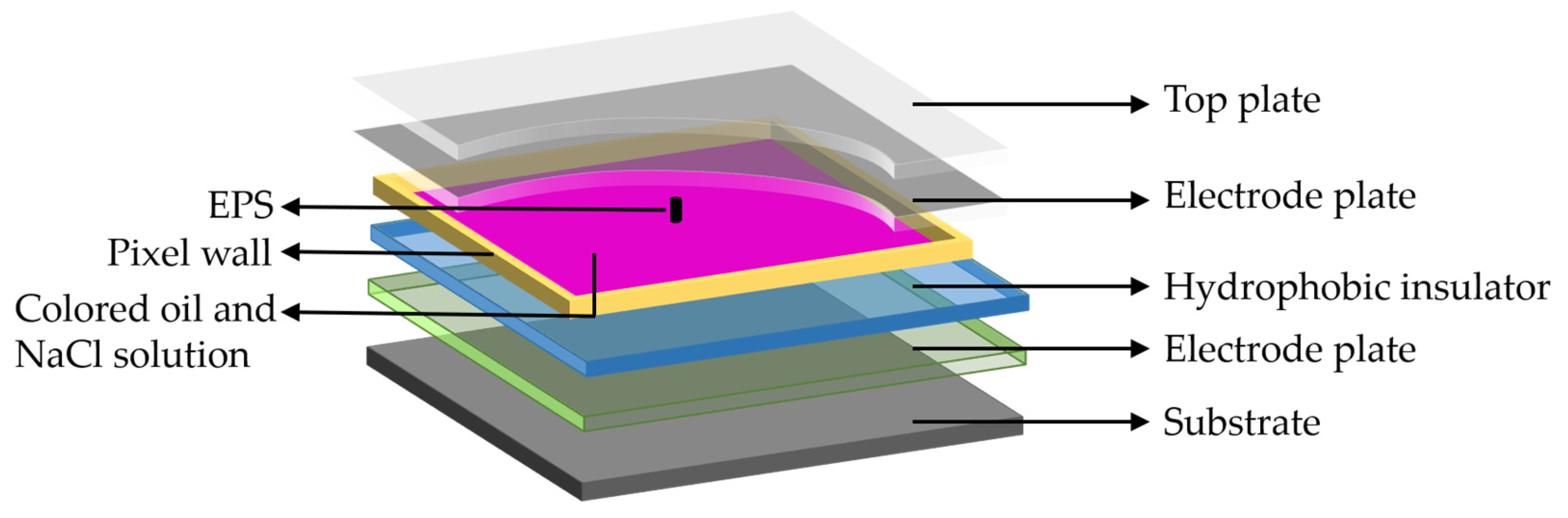
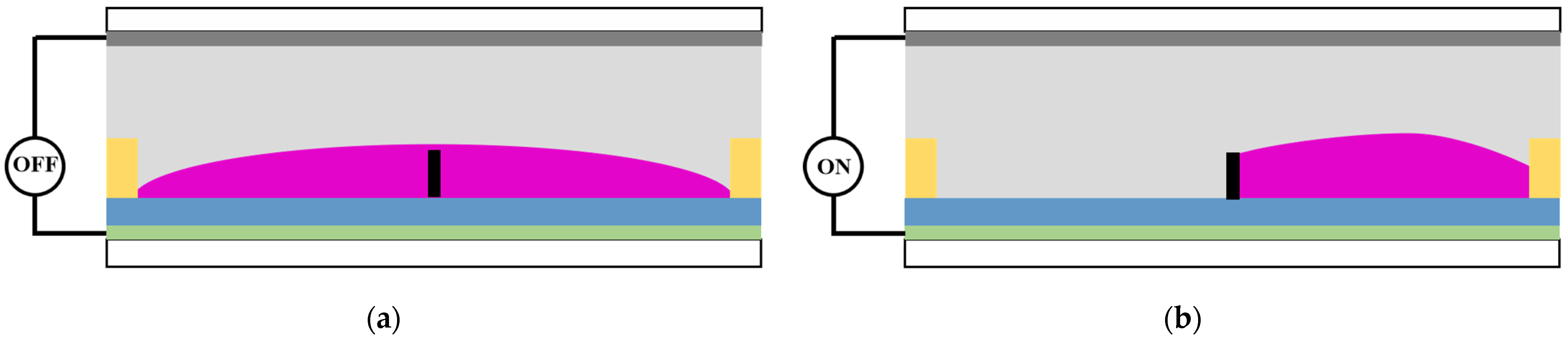
2. Principles of EWDs
2.1. Model of EWDs
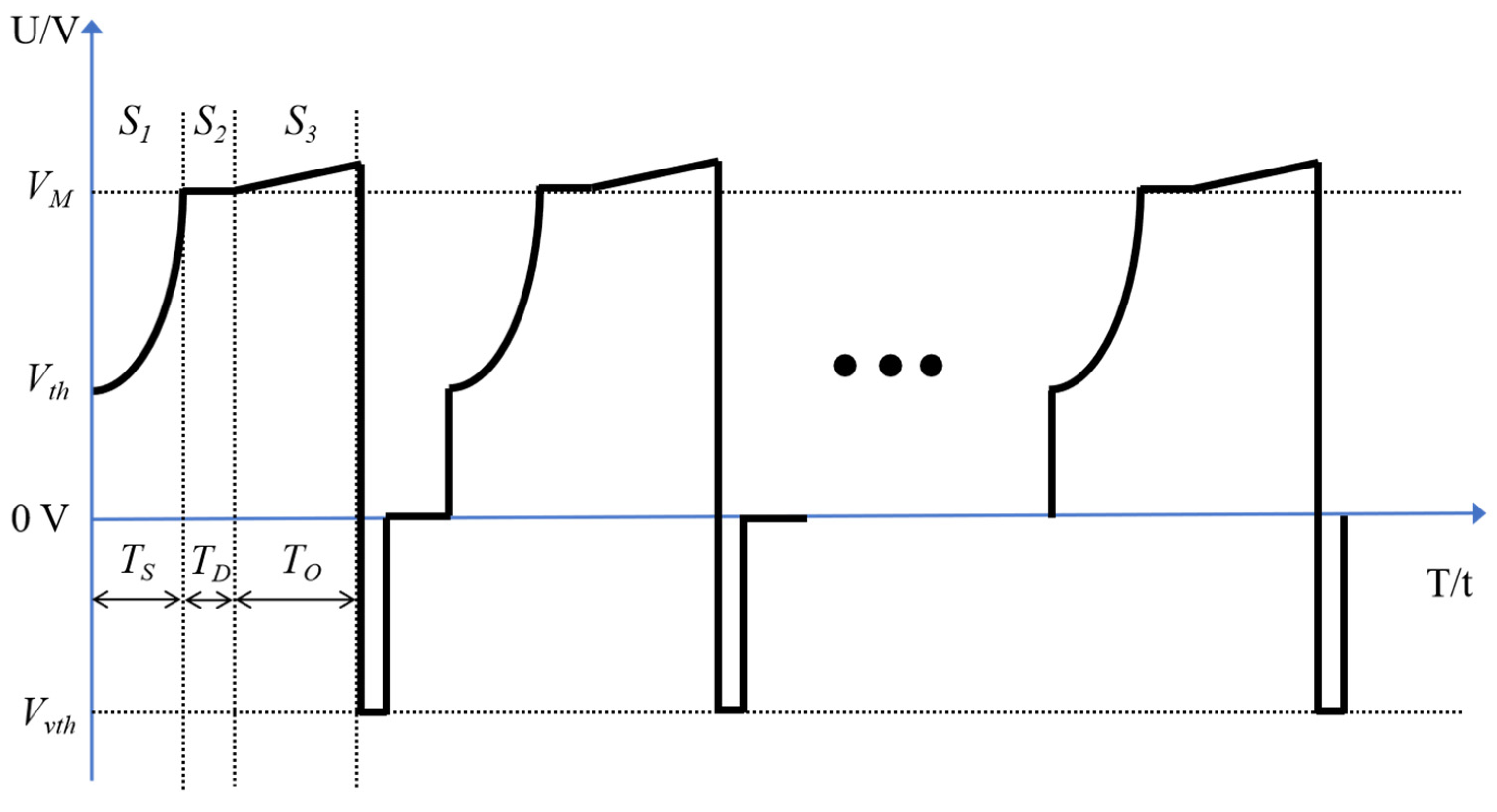
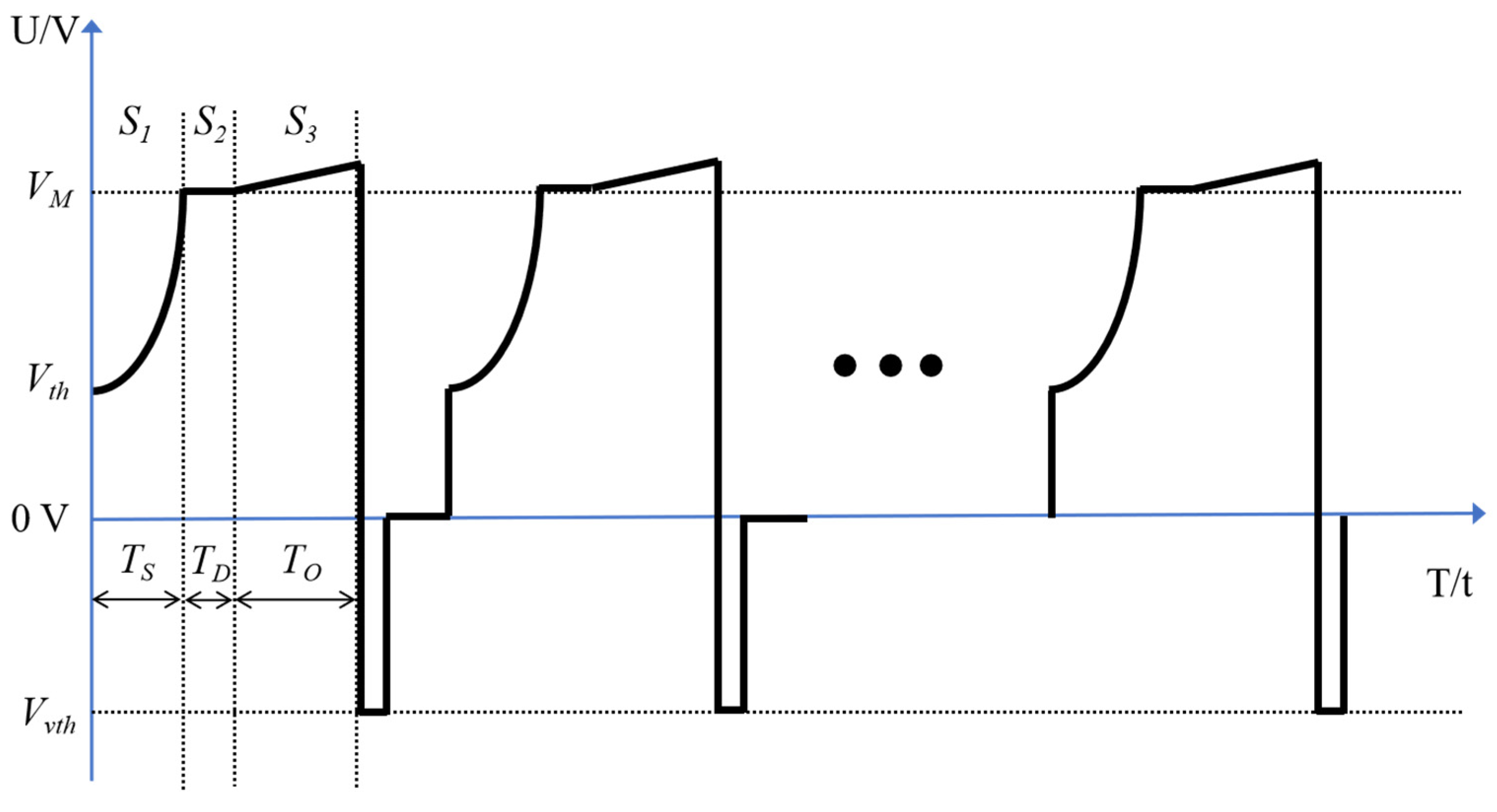
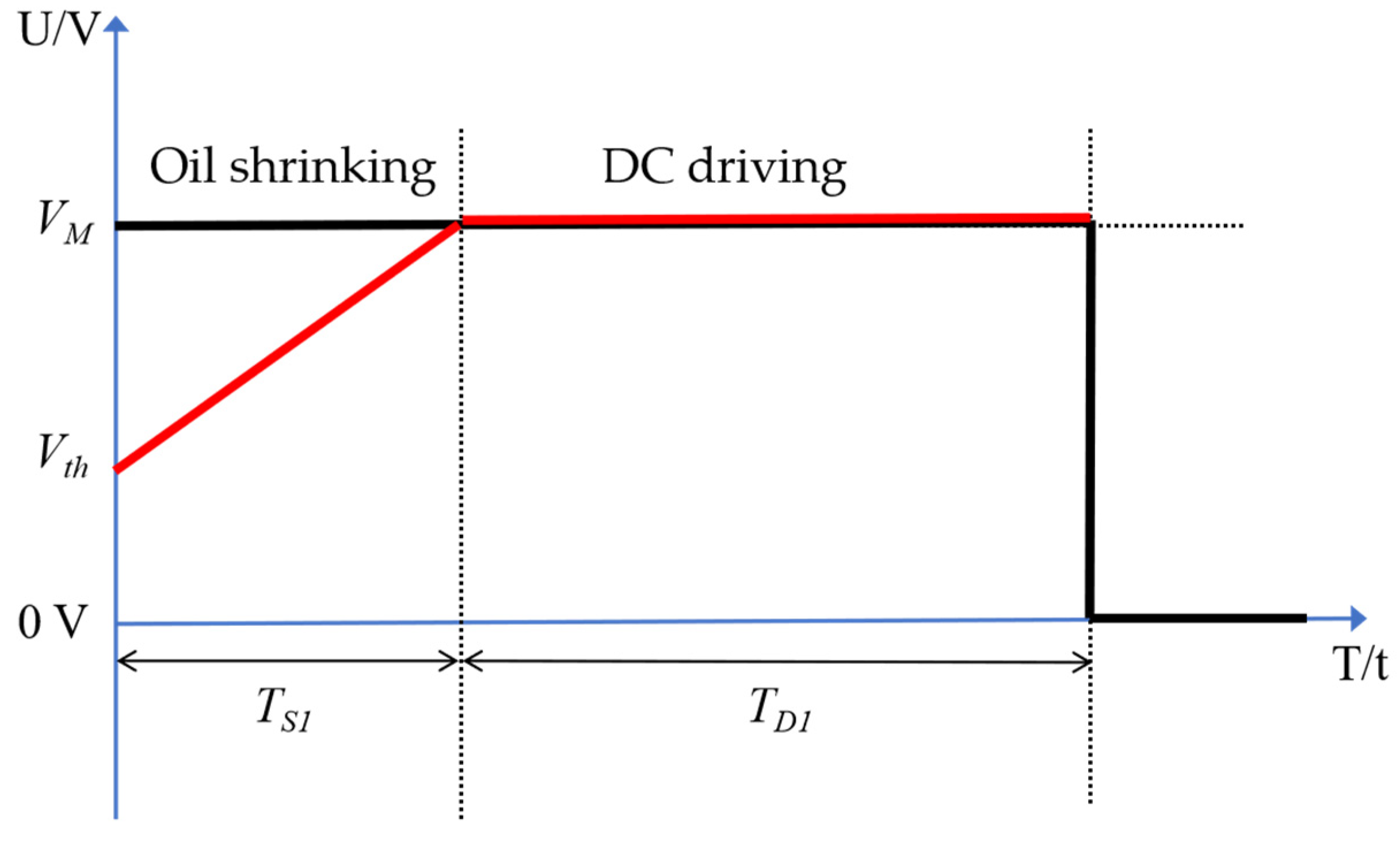
2.2. Driving Waveform Design
3. Experimental Results and Discussion
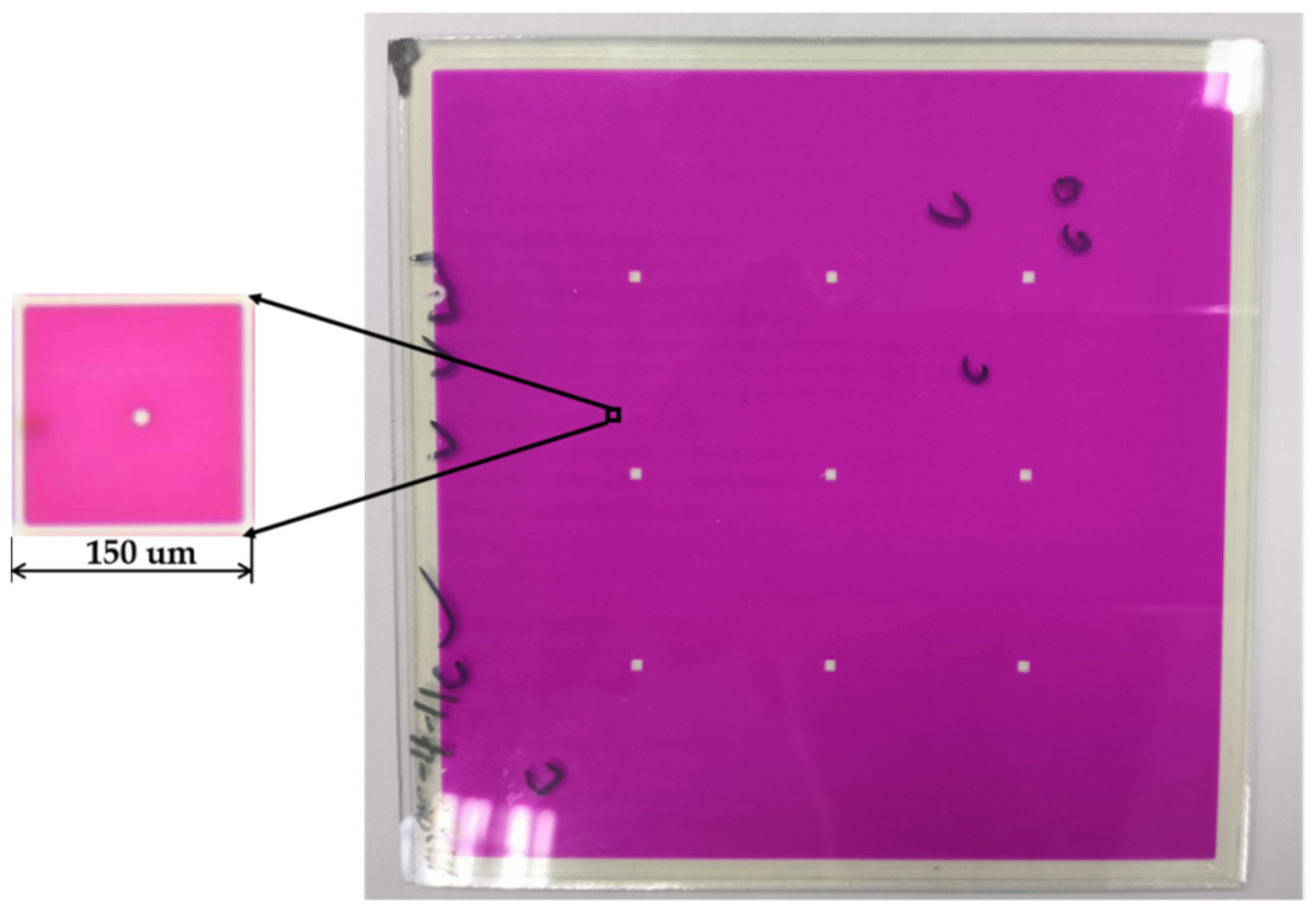
3.1. Experimental Platform
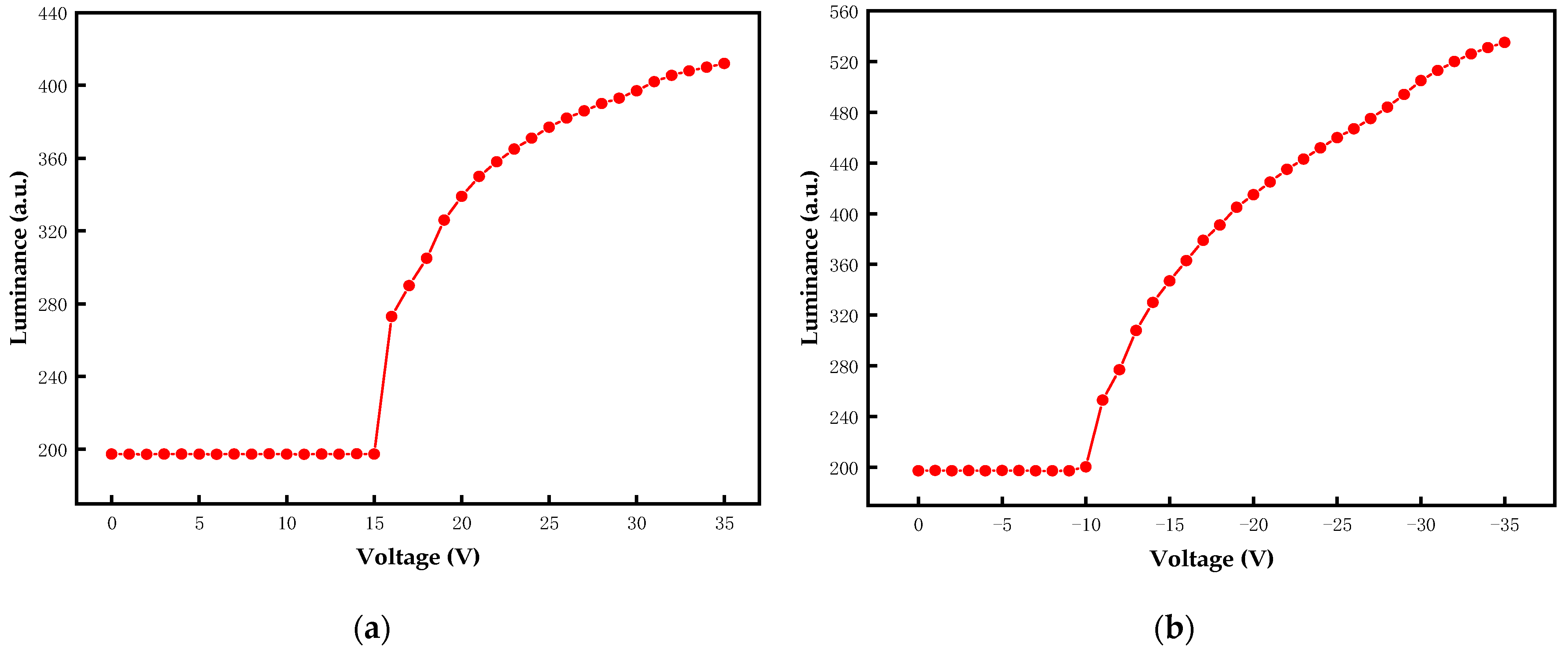
3.2. Threshold Voltage
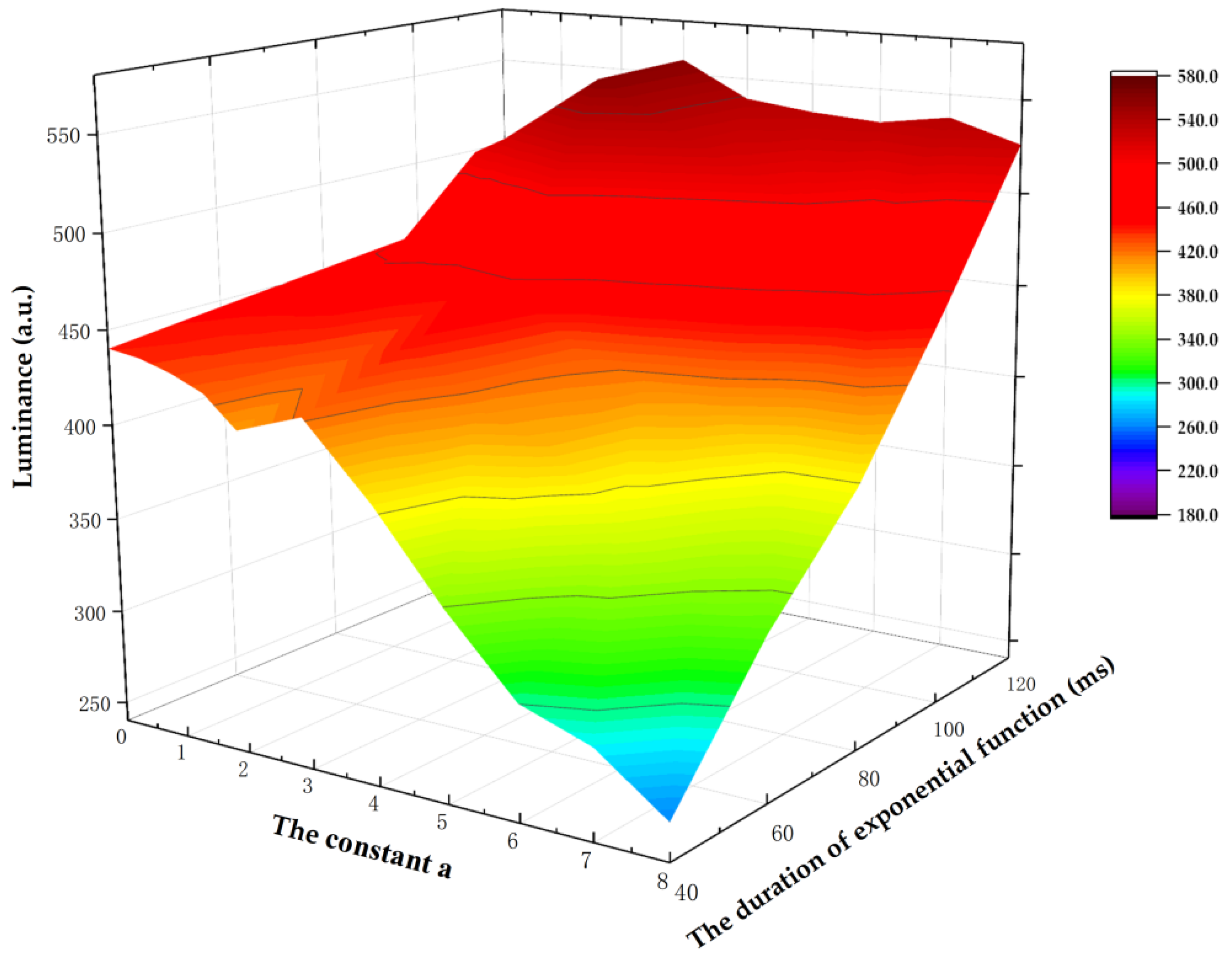
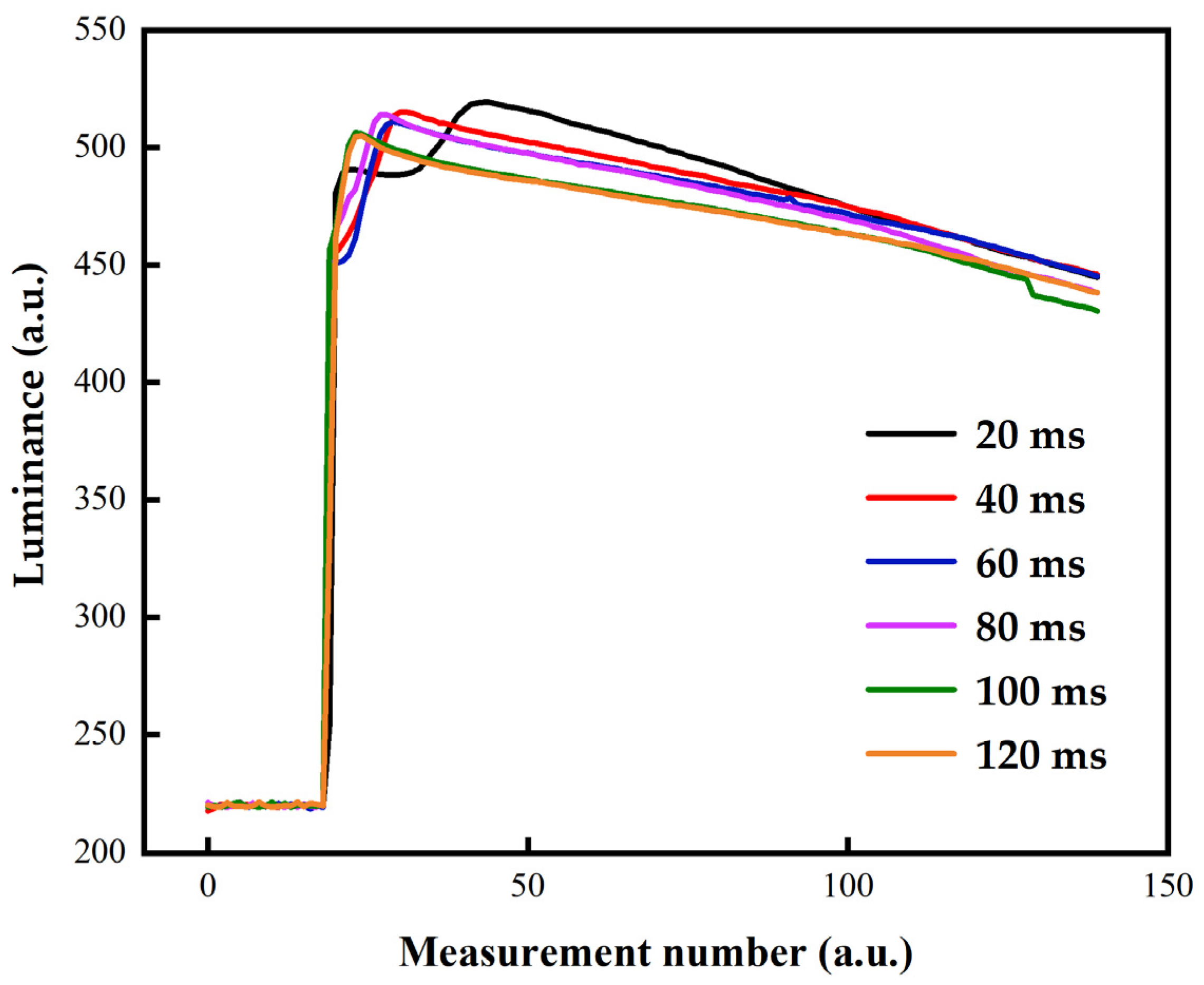
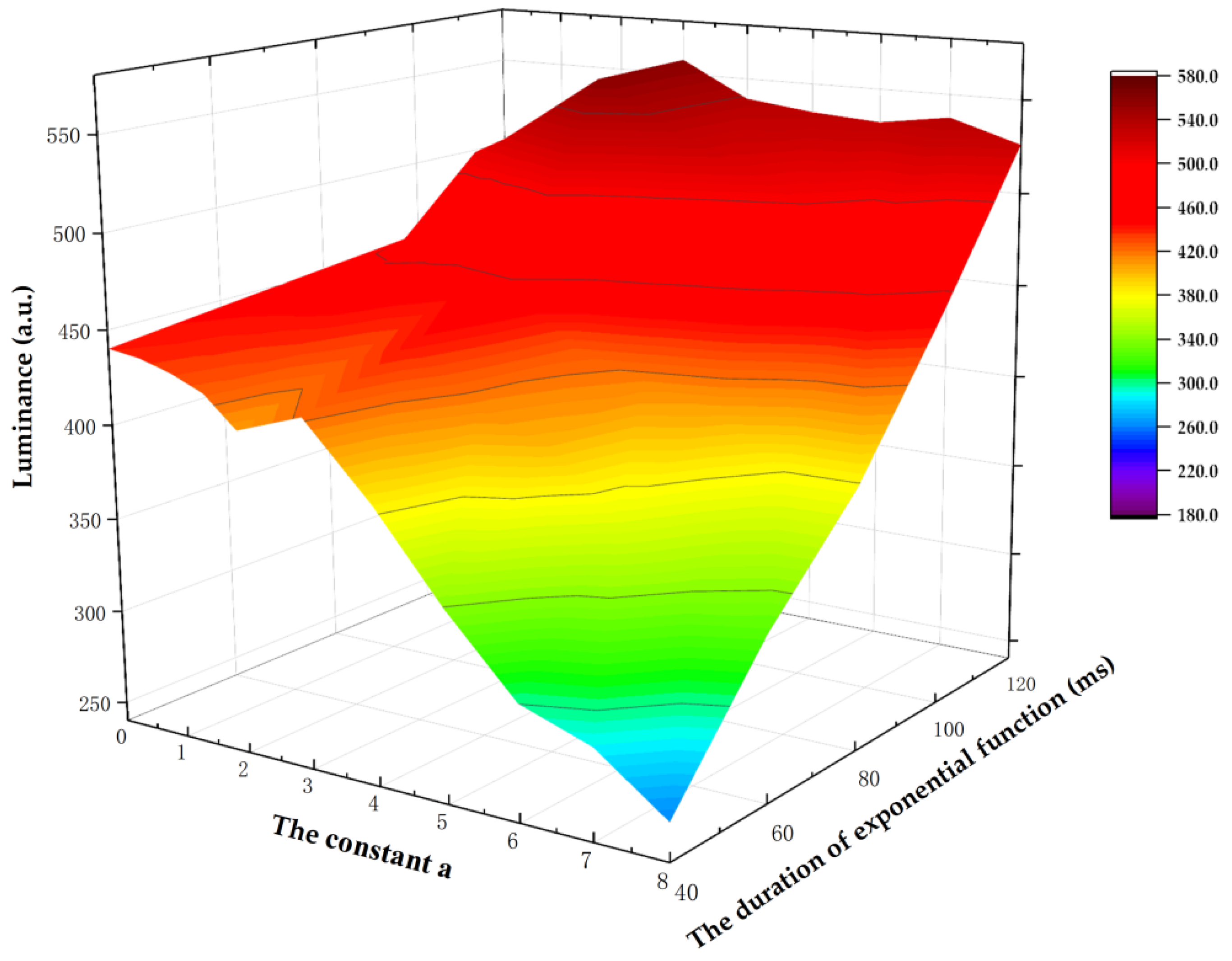
3.3. Optimization of Oil Splitting Suppression Stage
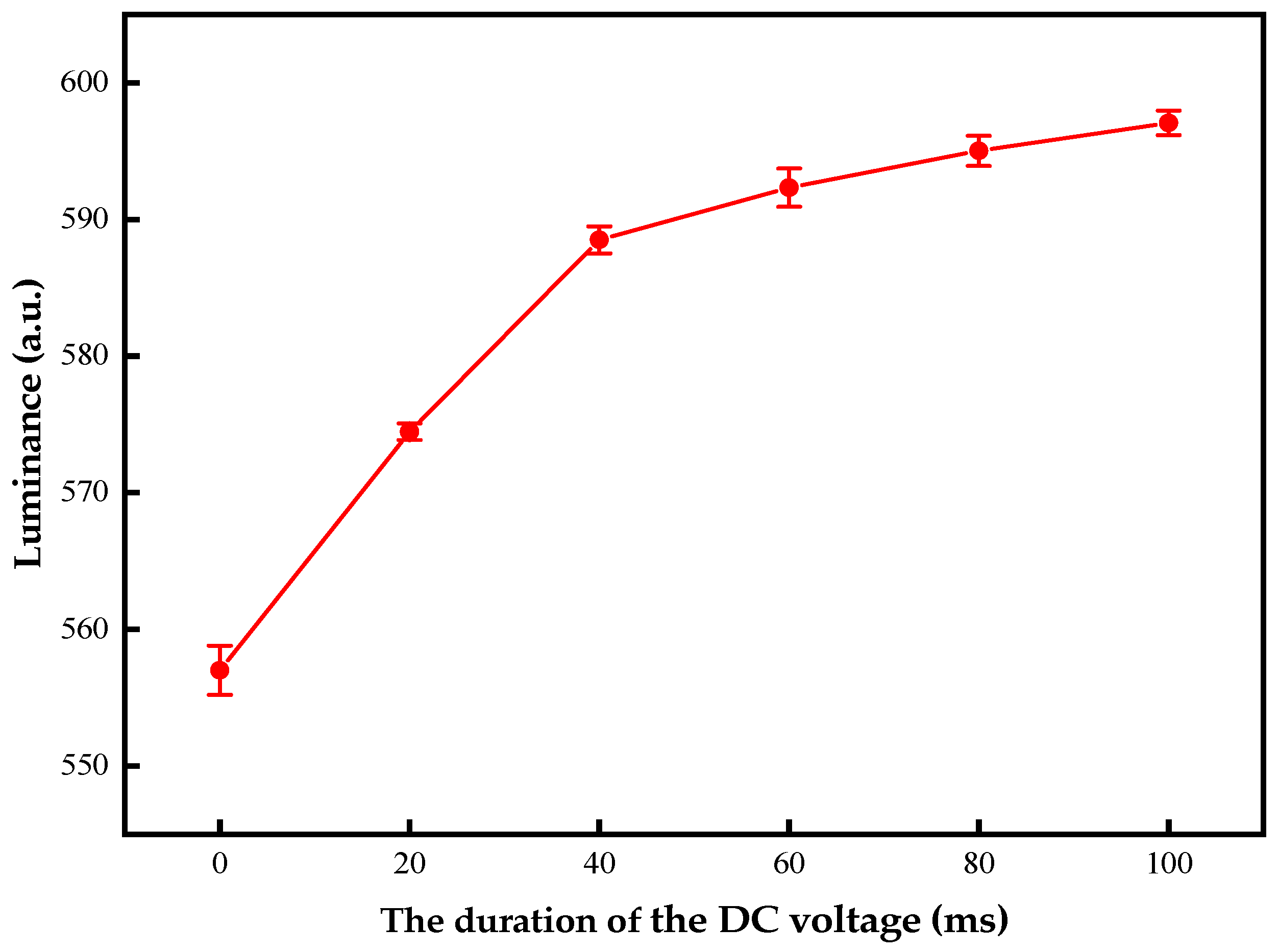
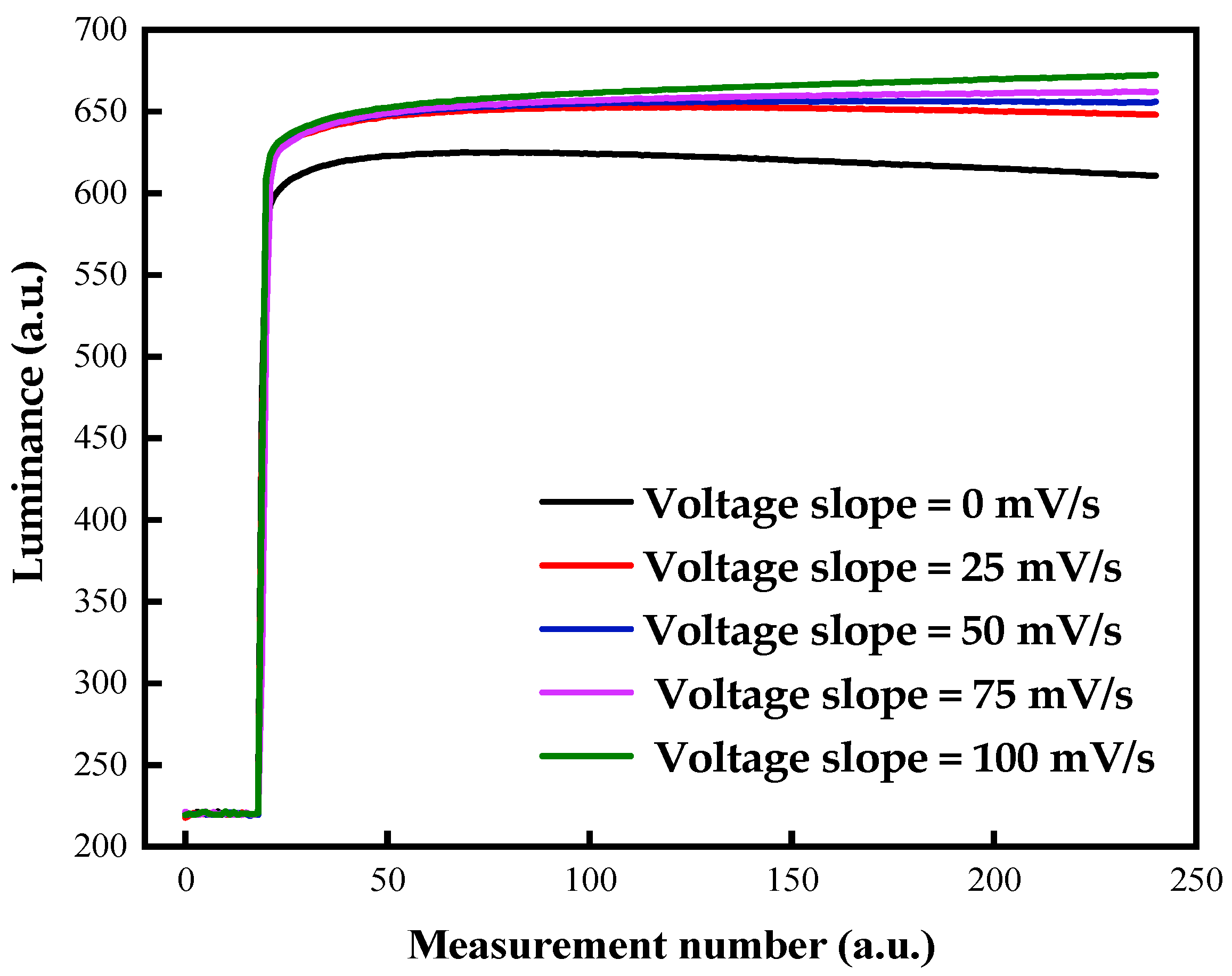
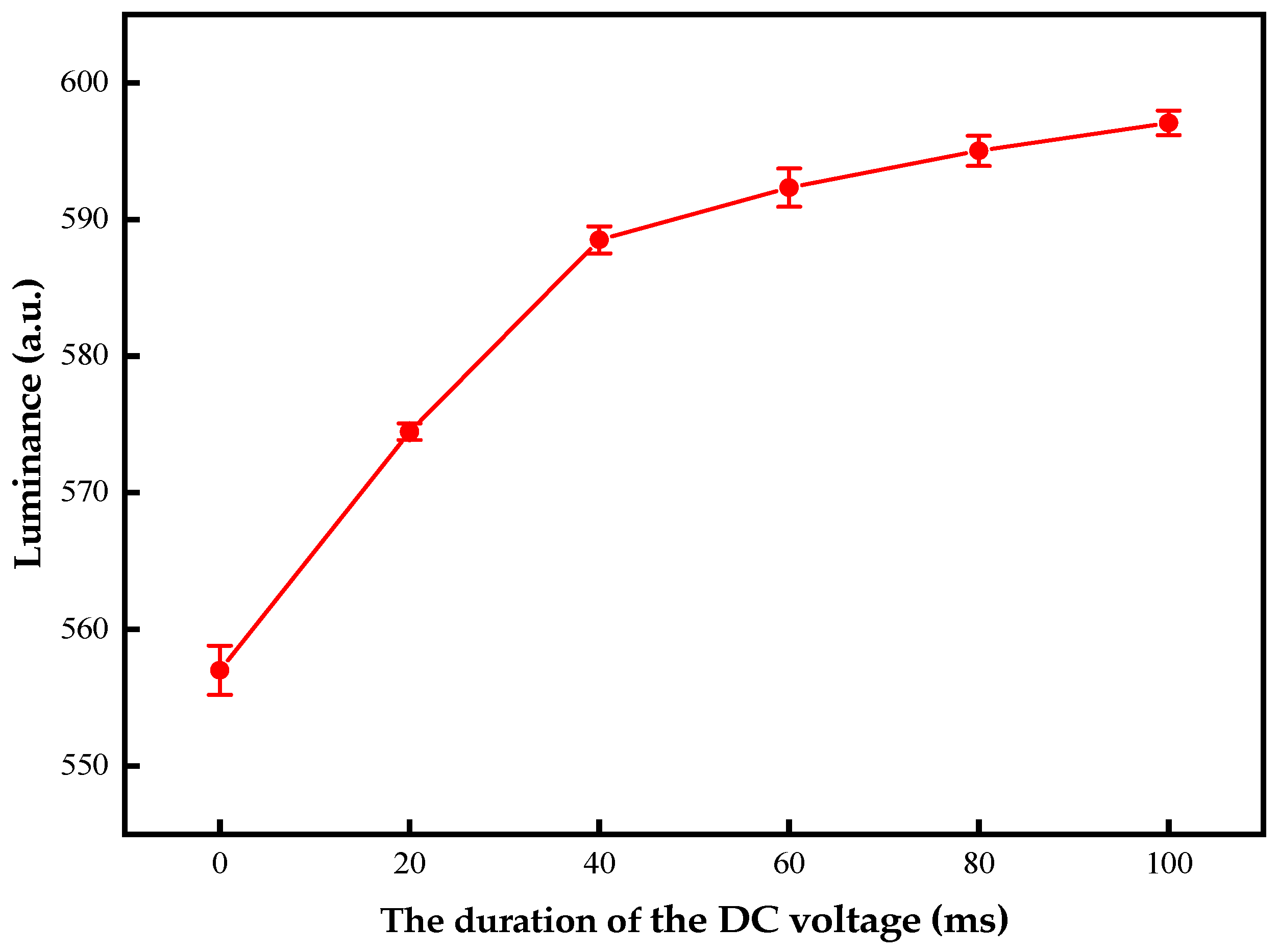
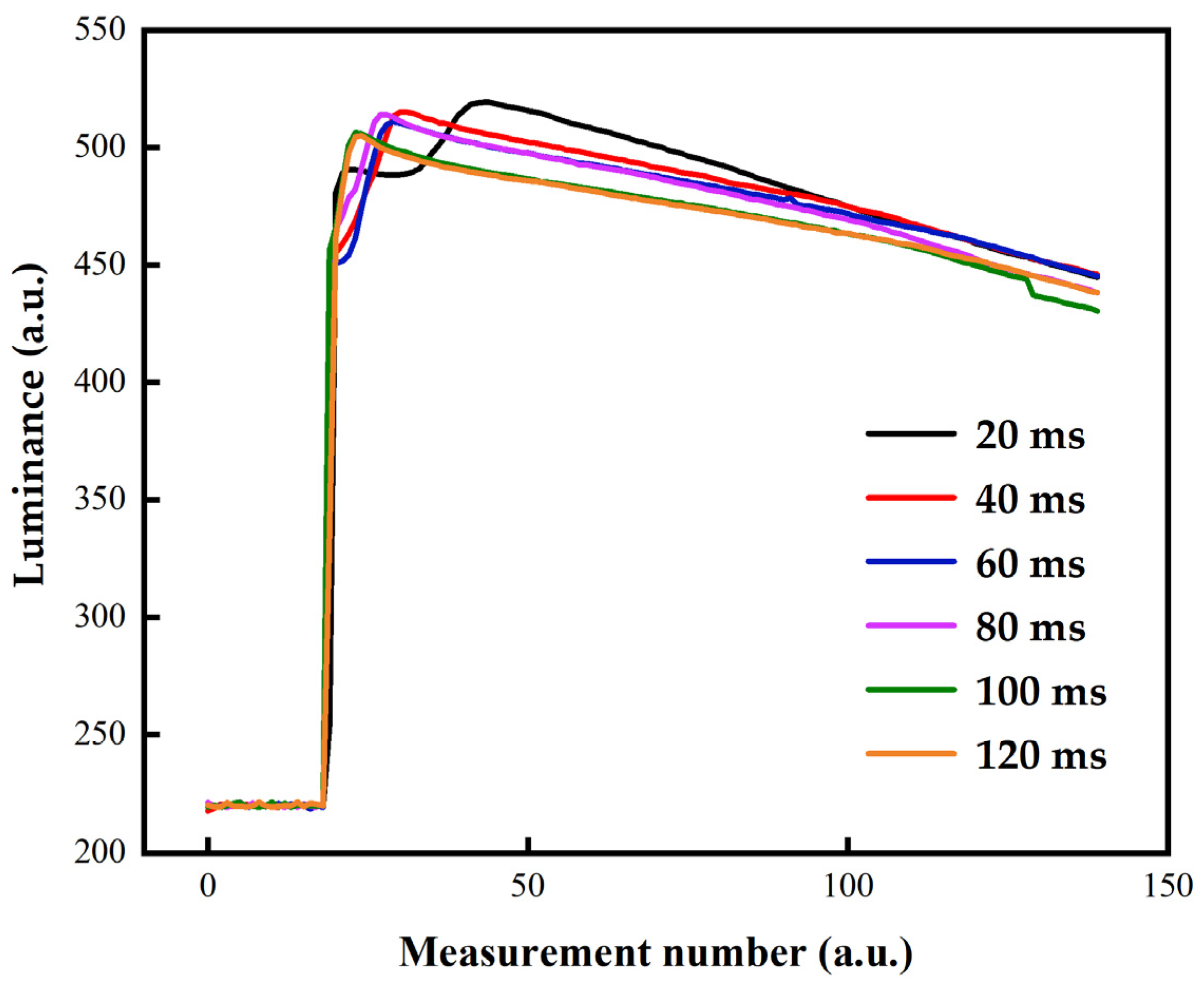
3.4. Optimization of DC Driving Stage
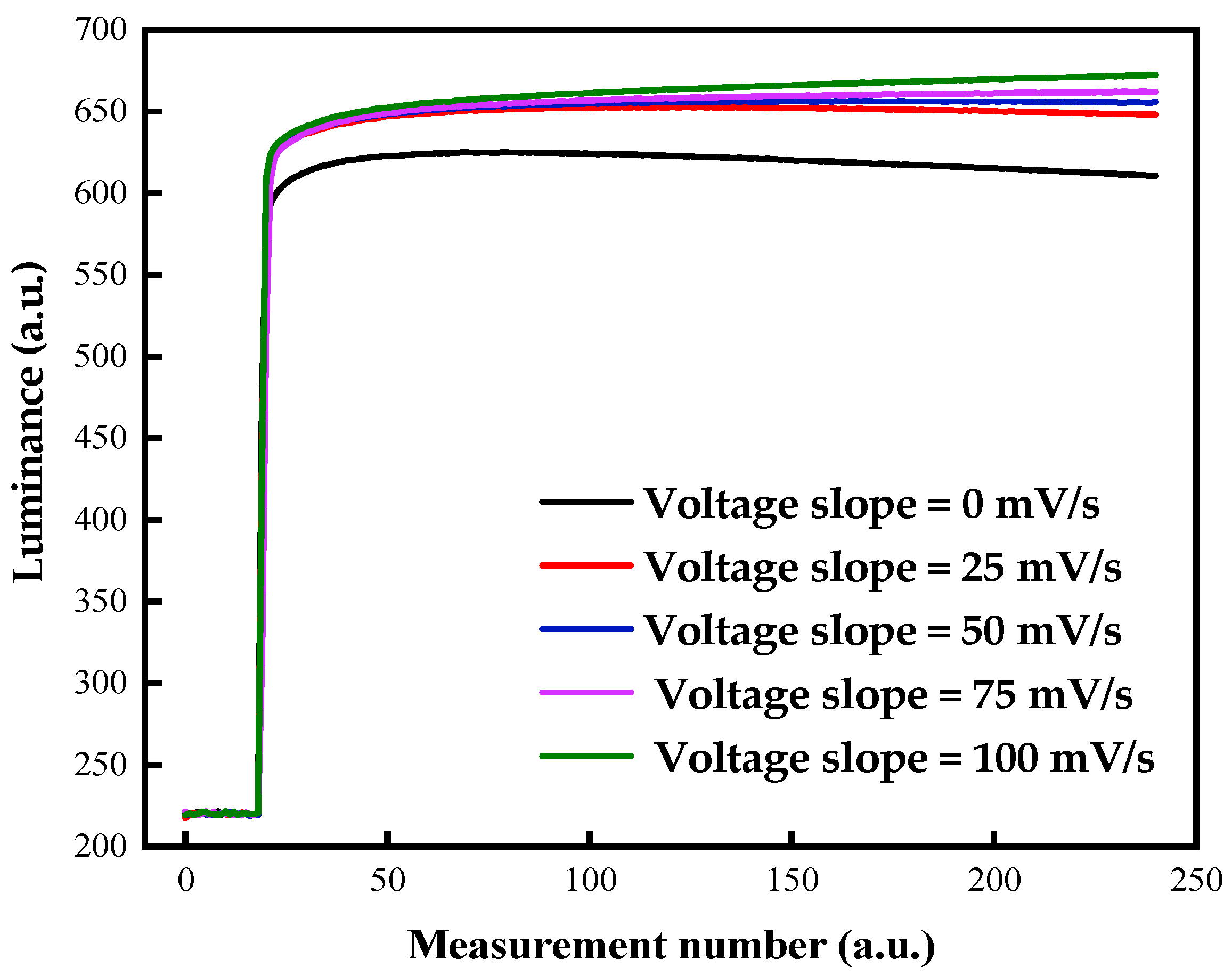
3.5. Optimization of Oil Stabilization Stage
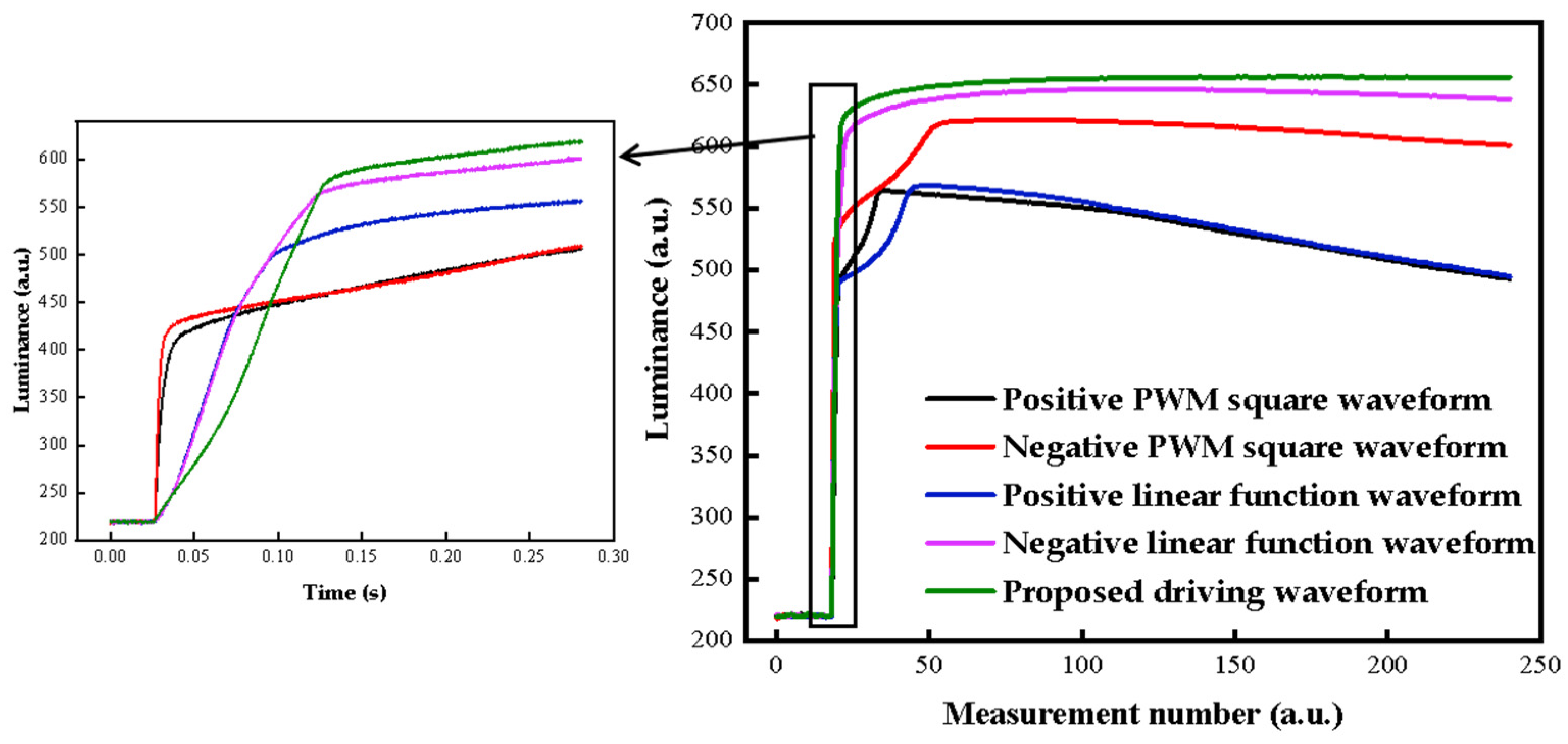
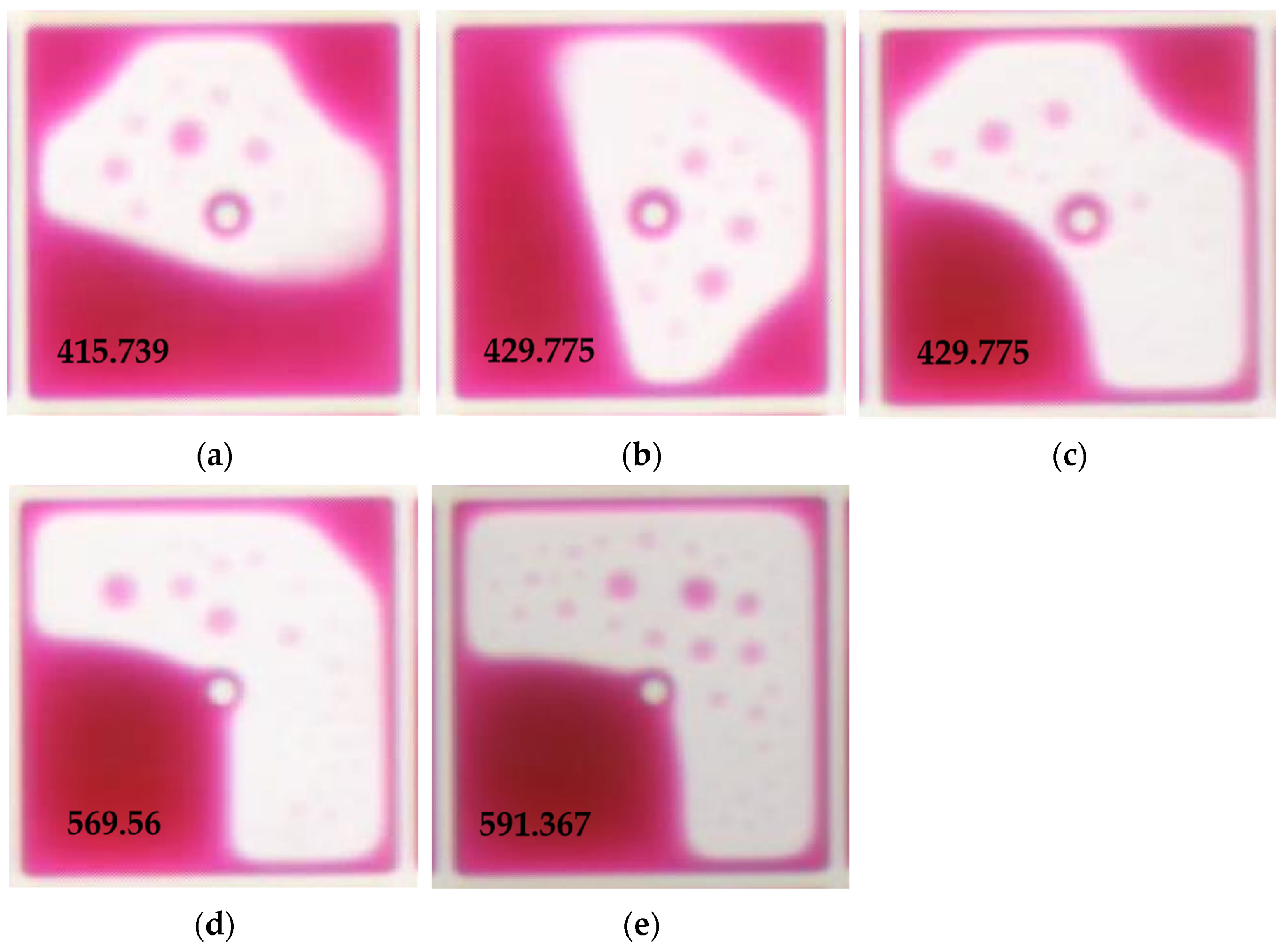
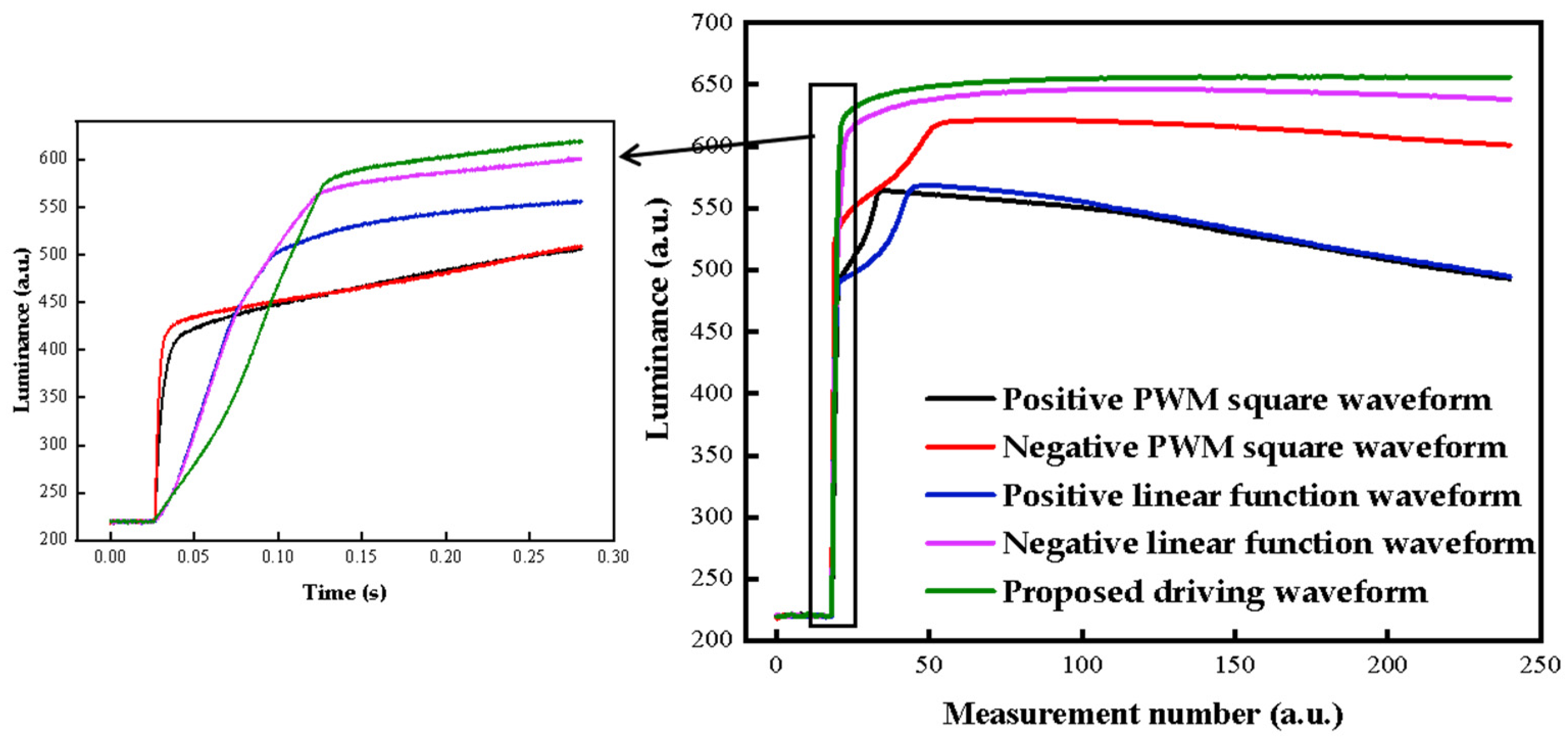
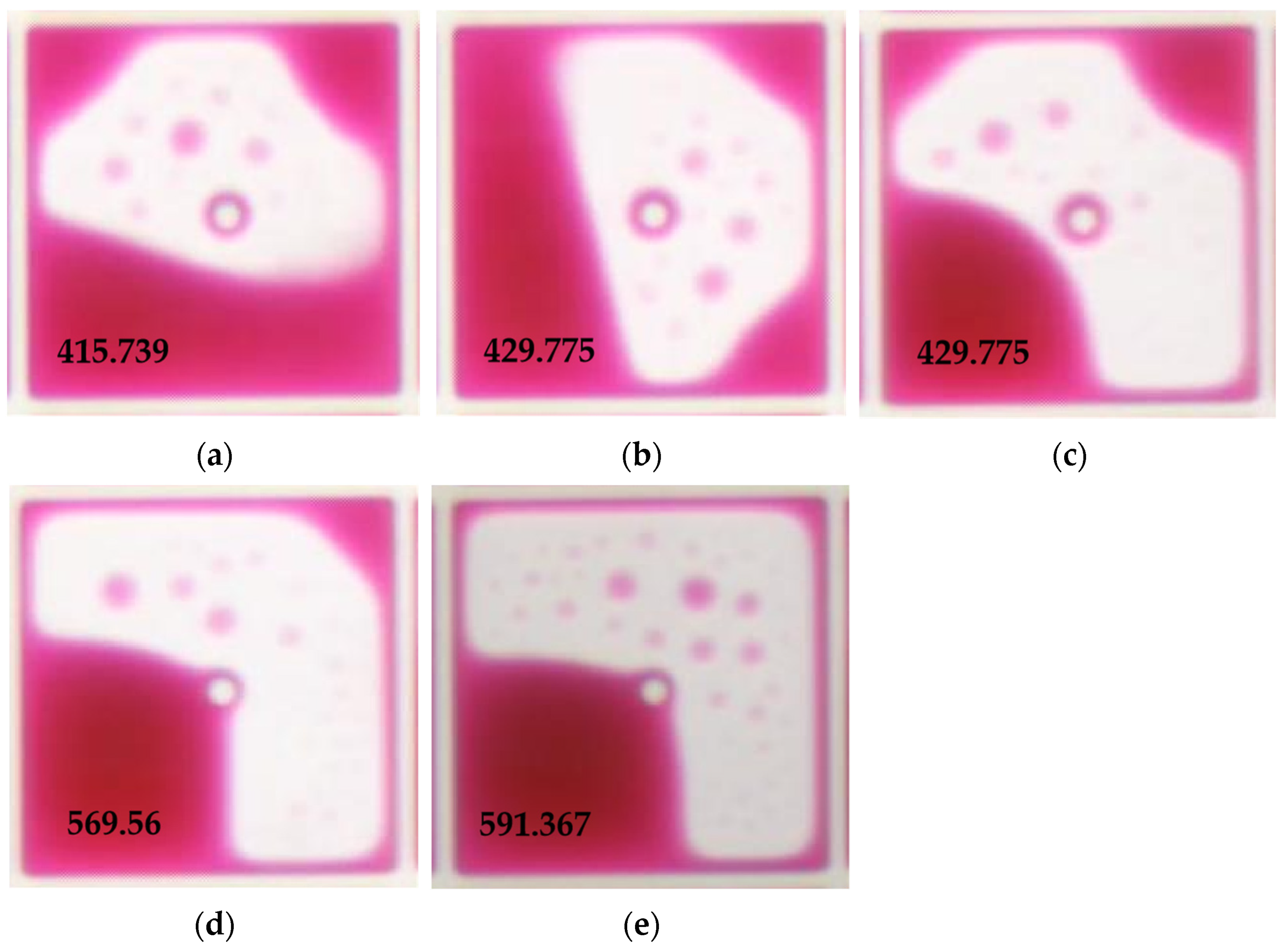
3.6. Performance Comparison of Driving Waveforms
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- You, H.; Steckl, A.J. Three-color electrowetting display device for electronic paper. Appl. Phys. Lett. 2010, 97, 023514. [Google Scholar] [CrossRef] [Green Version]
- Shui, L.L.; Hayes, R.A.; Jin, M.L.; Zhang, X.; Bai, P.F.; van den Berg, A.; Zhou, G.F. Microfluidics for electronic paper-like displays. Lab Chip 2014, 14, 2374–2384. [Google Scholar] [CrossRef]
- Shen, S.T.; Gong, Y.G.; Jin, M.L.; Yan, Z.B.; Xu, C.; Yi, Z.C.; Zhou, G.F.; Shui, L.L. Improving Electrophoretic Particle Motion Control in Electrophoretic Displays by Eliminating the Fringing Effect via Driving Waveform Design. Micromachines 2018, 9, 143. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luo, Z.; Luo, J.; Zhao, W.; Cao, Y.; Lin, W.; Zhou, G. A high-resolution and intelligent dead pixel detection scheme for an electrowetting display screen. Opt. Rev. 2017, 25, 18–26. [Google Scholar] [CrossRef]
- Li, D.D.; Lai, W.Y.; Zhang, Y.Z.; Huang, W. Printable Transparent Conductive Films for Flexible Electronics. Adv. Mater. 2018, 30, 1704738. [Google Scholar] [CrossRef]
- Bai, P.F.; Hayes, R.A.; Jin, M.L.; Shui, L.L.; Yi, Z.C.; Wang, L.; Zhang, X.; Zhou, G.F. Review of paper-like display technologies. Prog. Electromagn. Res. 2014, 147, 95–116. [Google Scholar] [CrossRef] [Green Version]
- Jin, M.L.; Shen, S.T.; Yi, Z.C.; Zhou, G.F.; Shui, L.L. Optofluid-Based Reflective Displays. Micromachines 2018, 9, 159. [Google Scholar] [CrossRef] [Green Version]
- Zhou, M.; Zhao, Q.; Tang, B.; Groenewold, J.; Hayes, R.A.; Zhou, G.F. Simplified dynamical model for optical response of electrofluidic displays. Displays 2017, 49, 26–34. [Google Scholar] [CrossRef]
- Liu, L.W.; Bai, P.F.; Yi, Z.C.; Zhou, G.F. A Separated Reset Waveform Design for Suppressing Oil Backflow in Active Matrix Electrowetting Displays. Micromachines 2021, 12, 491. [Google Scholar] [CrossRef]
- Hayes, R.; Feenstra, B. Video-speed electronic paper based on electrowetting. Nature 2003, 425, 383–385. [Google Scholar] [CrossRef]
- Li, W.; Wang, L.; Zhang, T.Y.; Lai, S.F.; Liu, L.W.; He, W.Y.; Zhou, G.F.; Yi, Z.C. Driving Waveform Design with Rising Gradient and Sawtooth Wave of Electrowetting Displays for Ultra-Low Power Consumption. Micromachines 2020, 11, 145. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, Q.; Tang, B.; Dong, B.Q.; Li, H.; Zhou, R.; Guo, Y.Y.; Dou, Y.Y.; Deng, Y. Electrowetting on dielectric: Experimental and model study of oil conductivity on rupture voltage. J. Phys. D Appl. Phys. 2018, 51, 195102. [Google Scholar] [CrossRef]
- Li, X.M.; Tian, H.M.; Shao, J.Y.; Ding, Y.C.; Chen, X.L.; Wang, L.; Lu, B.H. Decreasing the Saturated Contact Angle in Electrowetting-on-Dielectrics by Controlling the Charge Trapping at Liquid-Solid Interfaces. Adv. Funct. Mater. 2016, 26, 2994–3002. [Google Scholar] [CrossRef]
- Luo, Z.J.; Fan, J.J.; Xu, J.Z.; Zhou, G.F.; Liu, S.Y. A novel driving scheme for oil-splitting suppression in Electrowetting display. Opt. Rev. 2020, 27, 339–345. [Google Scholar] [CrossRef]
- Roques-Carmes, T.; Hayes, R.A.; Feenstra, B.J.; Schlangen, L.J.M. Liquid behavior inside a reflective display pixel based on electrowetting. J. Appl. Phys. 2004, 95, 4389–4396. [Google Scholar] [CrossRef]
- Blankenbach, K.; Schmoll, A.; Bitman, A.; Bartels, F.; Jerosch, D. Novel highly reflective and bistable electrowetting displays. J. Soc. Inf. Disp. 2008, 16, 237–244. [Google Scholar] [CrossRef]
- Annapragada, S.R.; Dash, S.; Garimella, S.V.; Murthy, J.Y. Dynamics of Droplet Motion under Electrowetting Actuation. Langmuir 2011, 27, 8198–8204. [Google Scholar] [CrossRef]
- Gao, J.; Mendel, N.; Dey, R.; Baratian, D.; Mugele, F. Contact angle hysteresis and oil film lubrication in electrowetting with two immiscible liquids. Appl. Phys. Lett. 2018, 112, 203703. [Google Scholar] [CrossRef] [Green Version]
- Roques-Carmes, T.; Hayes, R.A.; Schlangen, L.J.M. A physical model describing the electro-optic behavior of switchable optical elements based on electrowetting. J. Appl. Phys. 2004, 96, 6267–6271. [Google Scholar] [CrossRef]
- Wu, H.; Dey, R.; Siretanu, I.; van den Ende, D.; Shui, L.L.; Zhou, G.F.; Mugele, F. Electrically Controlled Localized Charge Trapping at Amorphous Fluoropolymer-Electrolyte Interfaces. Small 2020, 16, 1905726. [Google Scholar] [CrossRef]
- He, T.; Jin, M.; Eijkel, J.C.T.; Zhou, G.; Shui, L. Two-phase microfluidics in electrowetting displays and its effect on optical performance. Biomicrofluidics 2016, 10, 011908. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, Y.; Tang, B.; Yang, G.S.; Guo, Y.Y.; Liu, L.W.; Henzen, A. Progress in Advanced Properties of Electrowetting Displays. Micromachines 2021, 12, 206. [Google Scholar] [CrossRef] [PubMed]
- Yi, Z.C.; Huang, Z.Y.; Lai, S.F.; He, W.Y.; Wang, L.; Chi, F.; Zhang, C.F.; Shui, L.L.; Zhou, G.F. Driving Waveform Design of Electrowetting Displays Based on an Exponential Function for a Stable Grayscale and a Short Driving Time. Micromachines 2020, 11, 313. [Google Scholar] [CrossRef] [Green Version]
- Yi, Z.C.; Feng, W.Y.; Wang, L.; Liu, L.M.; Lin, Y.; He, W.Y.; Shui, L.L.; Zhang, C.F.; Zhang, Z.; Zhou, G.F. Aperture Ratio Improvement by Optimizing the Voltage Slope and Reverse Pulse in the Driving Waveform for Electrowetting Displays. Micromachines 2019, 10, 862. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yi, Z.C.; Feng, H.Q.; Zhou, X.F.; Shui, L.L. Design of an Open Electrowetting on Dielectric Device Based on Printed Circuit Board by Using a Parafilm M. Front. Phys. 2020, 8, 193. [Google Scholar] [CrossRef]
- Zhang, T.Y.; Deng, Y. Driving Waveform Design of Electrowetting Displays Based on a Reset Signal for Suppressing Charge Trapping Effect. Front. Phys. 2021, 9, 672541. [Google Scholar] [CrossRef]
- Chiu, Y.H.; Liang, C.C.; Chen, Y.C.; Lee, W.Y.; Chen, H.Y.; Wu, S.H. Accurate-gray-level and quick-response driving methods for high-performance electrowetting displays. J. Soc. Inf. Disp. 2011, 19, 741–748. [Google Scholar] [CrossRef]
- Liu, L.W.; Wu, Z.Y.; Wang, L.; Zhang, T.Y.; Li, W.; Lai, S.F.; Bai, P.F. Design of an AC Driving Waveform Based on Characteristics of Electrowetting Stability for Electrowetting Displays. Front. Phys. 2020, 8, 618752. [Google Scholar] [CrossRef]
- Tang, B.; Groenewold, J.; Zhou, M.; Hayes, R.A.; Zhou, G.F. Interfacial electrofluidics in confined systems. Sci. Rep. 2016, 6, 26593. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Mugele, F. How to make sticky surfaces slippery: Contact angle hysteresis in electrowetting with alternating voltage. Appl. Phys. Lett. 2008, 92, 244108. [Google Scholar] [CrossRef] [Green Version]
- Mugele, F.; Baret, J.C. Electrowetting: From basics to applications. J. Phys. 2005, 17, R705–R774. [Google Scholar] [CrossRef]
- Zhang, X.M.; Bai, P.F.; Hayes, R.A.; Shui, L.L.; Jin, M.L.; Tang, B.; Zhou, G.F. Novel Driving Methods for Manipulating Oil Motion in Electrofluidic Display Pixels. J. Disp. Technol. 2016, 12, 200–205. [Google Scholar] [CrossRef]
- Massard, R.; Mans, J.; Adityaputra, A.; Leguijt, R.; Staats, C.; Giraldo, A. Colored oil for electrowetting displays. J. Inf. Disp. 2013, 14, 1–6. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Model | Brand | Region | Country |
|---|---|---|---|---|
| Function generator | AFG3022C | Tektronix | Beaverton | USA |
| Voltage amplifier | ATA-2022H | Agitek | Xian | China |
| Colorimeter | Arges-45 | Admesy | Ittervoort | Netherlands |
| Computer | H430 | Lenovo | Beijing | China |
| Microscope | SZ680 | Cnoptec | Chongqing | China |
| 40 ms | 60 ms | 80 ms | 100 ms | 120 ms | |
|---|---|---|---|---|---|
| 0 | 440.294 | 446.657 | 452.792 | 458.785 | 464.608 |
| 0.5 | 437.85 | 443.94 | 457.044 | 469.691 | 480.899 |
| 1 | 432.642 | 441.537 | 459.17 | 509.923 | 521.182 |
| 1.5 | 425.089 | 437.411 | 450.145 | 519.337 | 530.381 |
| 2 | 408.986 | 427.506 | 443.689 | 531.848 | 542.352 |
| 3 | 421.623 | 441.799 | 457.414 | 556.987 | 558.095 |
| 4 | 383.879 | 414.123 | 427.55 | 535.412 | 538.86 |
| 5 | 338.916 | 400.065 | 416.199 | 516.78 | 534.414 |
| 6 | 300.147 | 369.065 | 405.117 | 501.701 | 531.941 |
| 7 | 287.367 | 340.183 | 380.038 | 483.118 | 537.67 |
| 8 | 259.716 | 325.923 | 378.029 | 449.279 | 526.248 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, L.; Zhang, H.; Yi, Z.; Zhang, B.; Zhou, R.; Zhou, G.; Gong, J. Inhibiting Oil Splitting and Backflow in Electrowetting Displays by Designing a Power Function Driving Waveform. Electronics 2022, 11, 2081. https://doi.org/10.3390/electronics11132081
Tian L, Zhang H, Yi Z, Zhang B, Zhou R, Zhou G, Gong J. Inhibiting Oil Splitting and Backflow in Electrowetting Displays by Designing a Power Function Driving Waveform. Electronics. 2022; 11(13):2081. https://doi.org/10.3390/electronics11132081
Chicago/Turabian StyleTian, Lixia, Hu Zhang, Zichuan Yi, Bingsong Zhang, Rui Zhou, Guofu Zhou, and Jianlong Gong. 2022. "Inhibiting Oil Splitting and Backflow in Electrowetting Displays by Designing a Power Function Driving Waveform" Electronics 11, no. 13: 2081. https://doi.org/10.3390/electronics11132081
APA StyleTian, L., Zhang, H., Yi, Z., Zhang, B., Zhou, R., Zhou, G., & Gong, J. (2022). Inhibiting Oil Splitting and Backflow in Electrowetting Displays by Designing a Power Function Driving Waveform. Electronics, 11(13), 2081. https://doi.org/10.3390/electronics11132081