
A Constant Current Wireless Power Transfer Scheme with Asymmetric Loosely Coupled Transformer for Electric Forklift



Abstract
:1. Introduction
2. Asymmetric Loosely Coupled Transformer
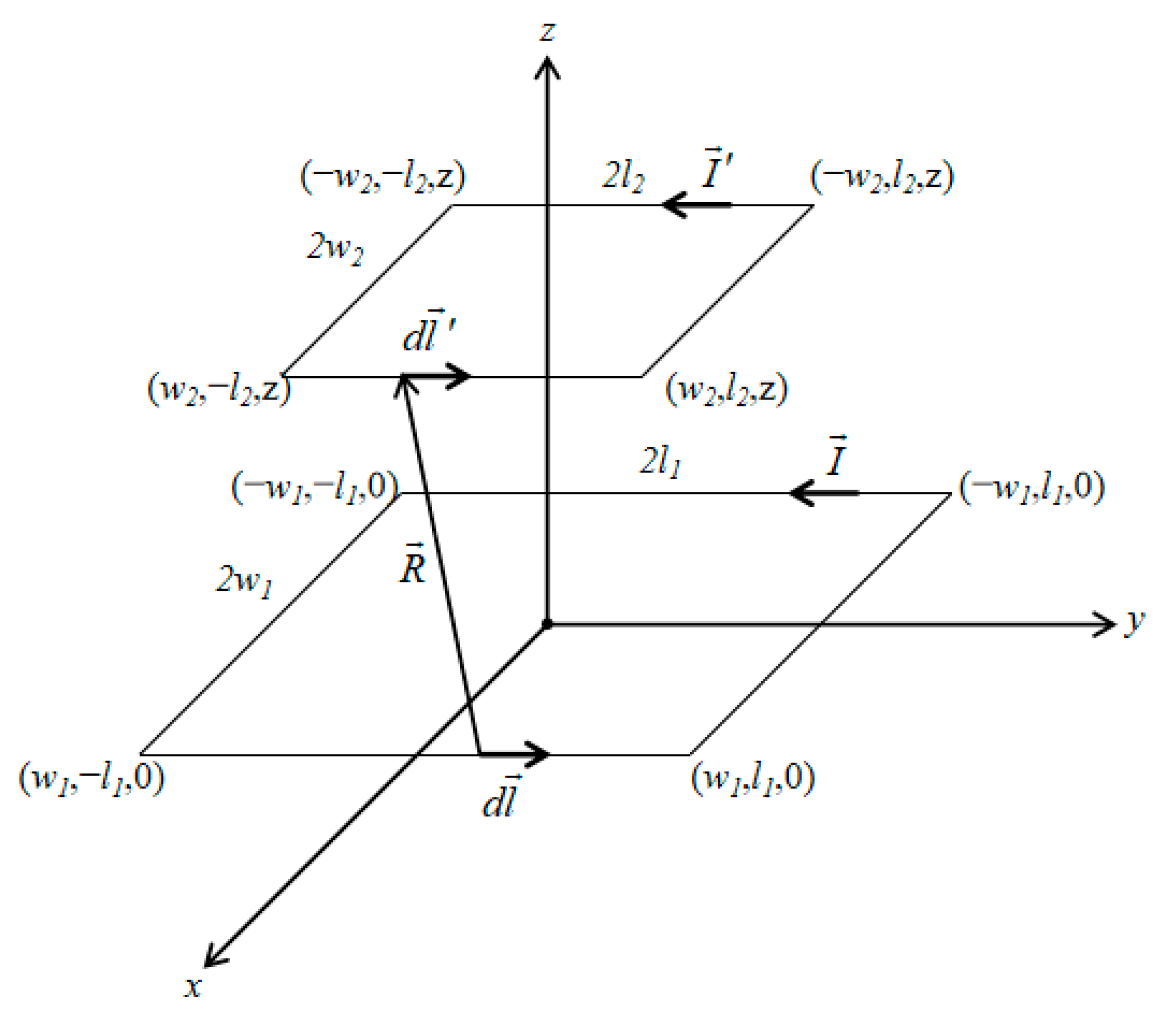
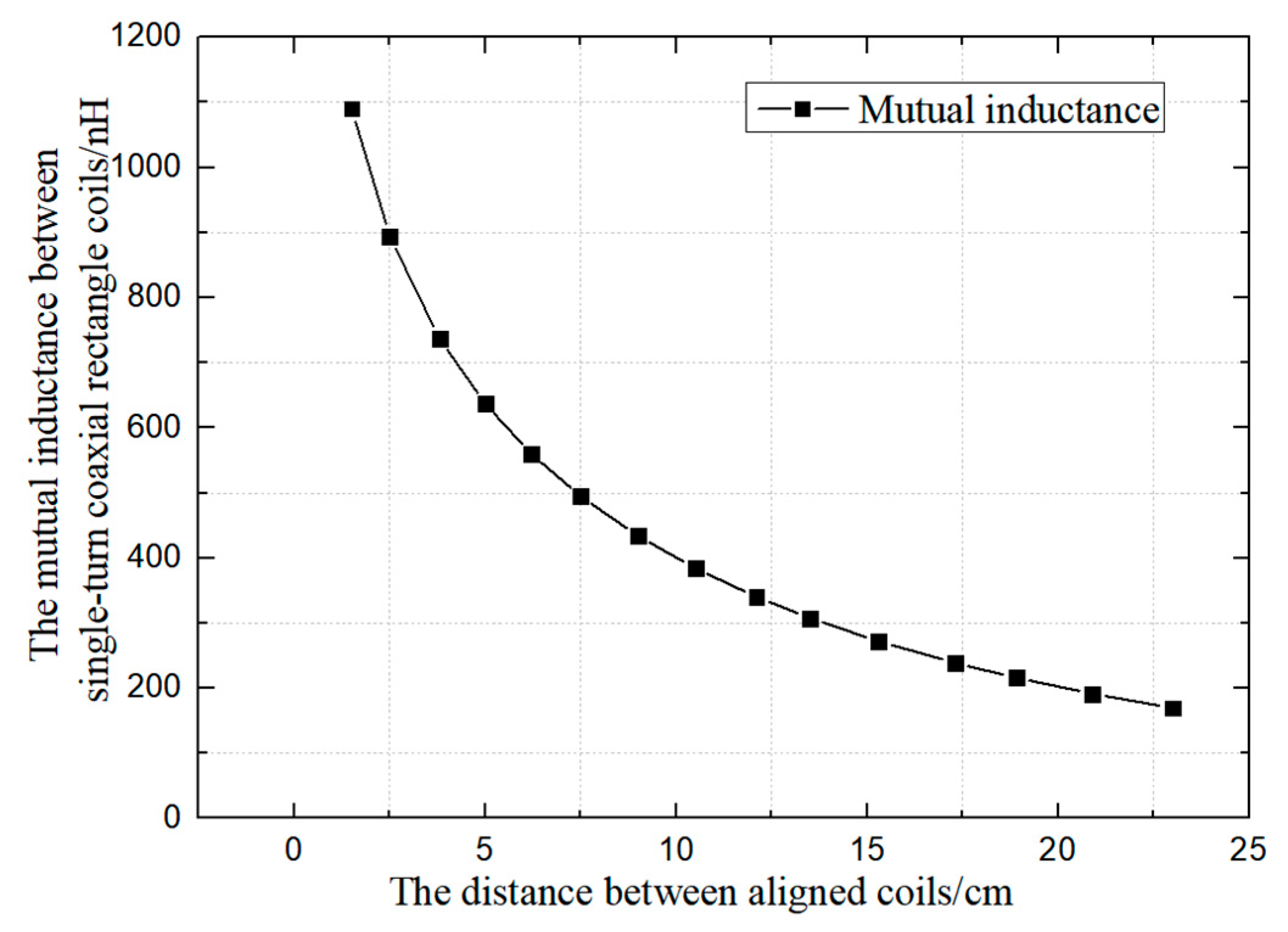
2.1. Mutual Inductance Calculation Based on Neumann Formula
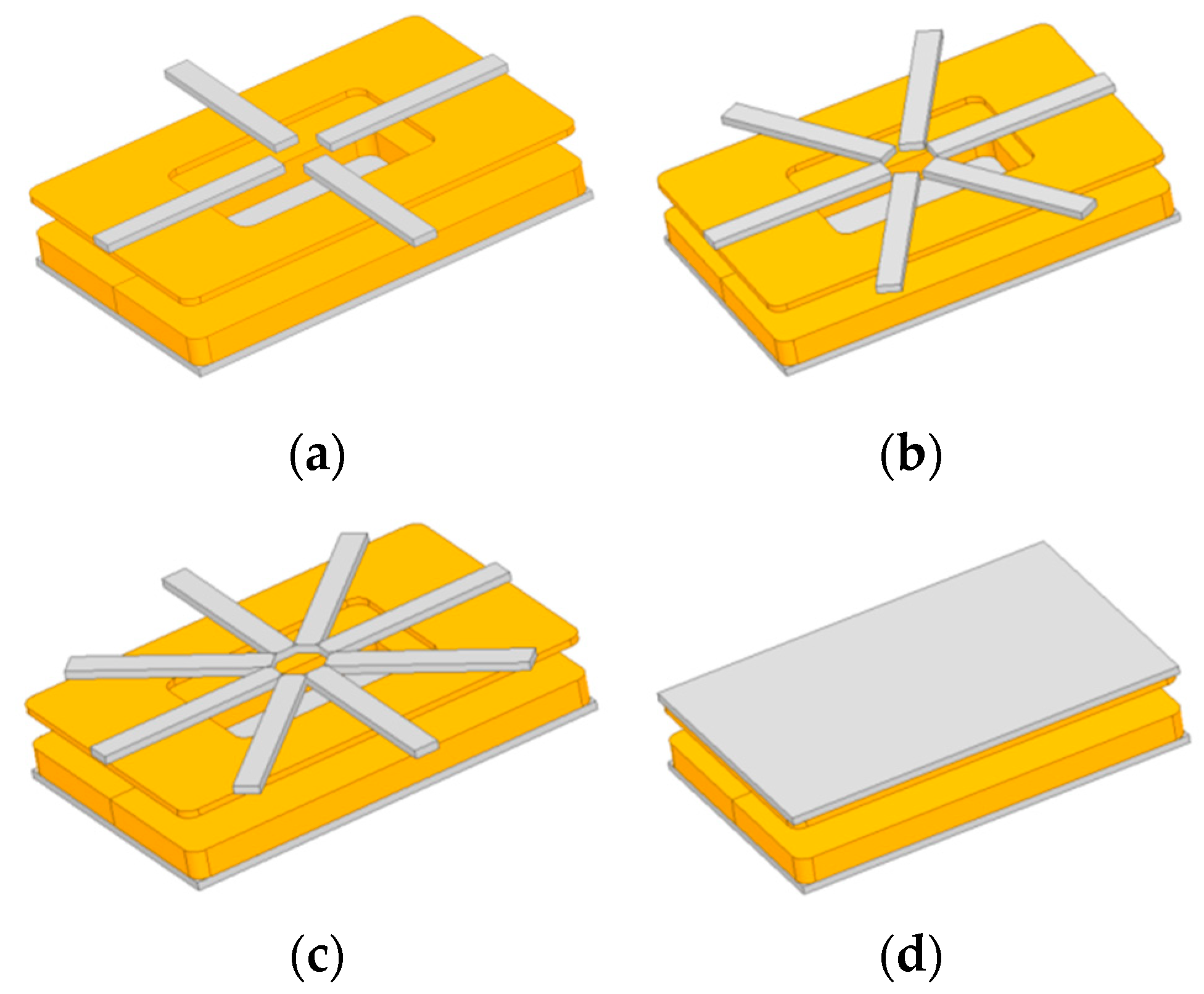
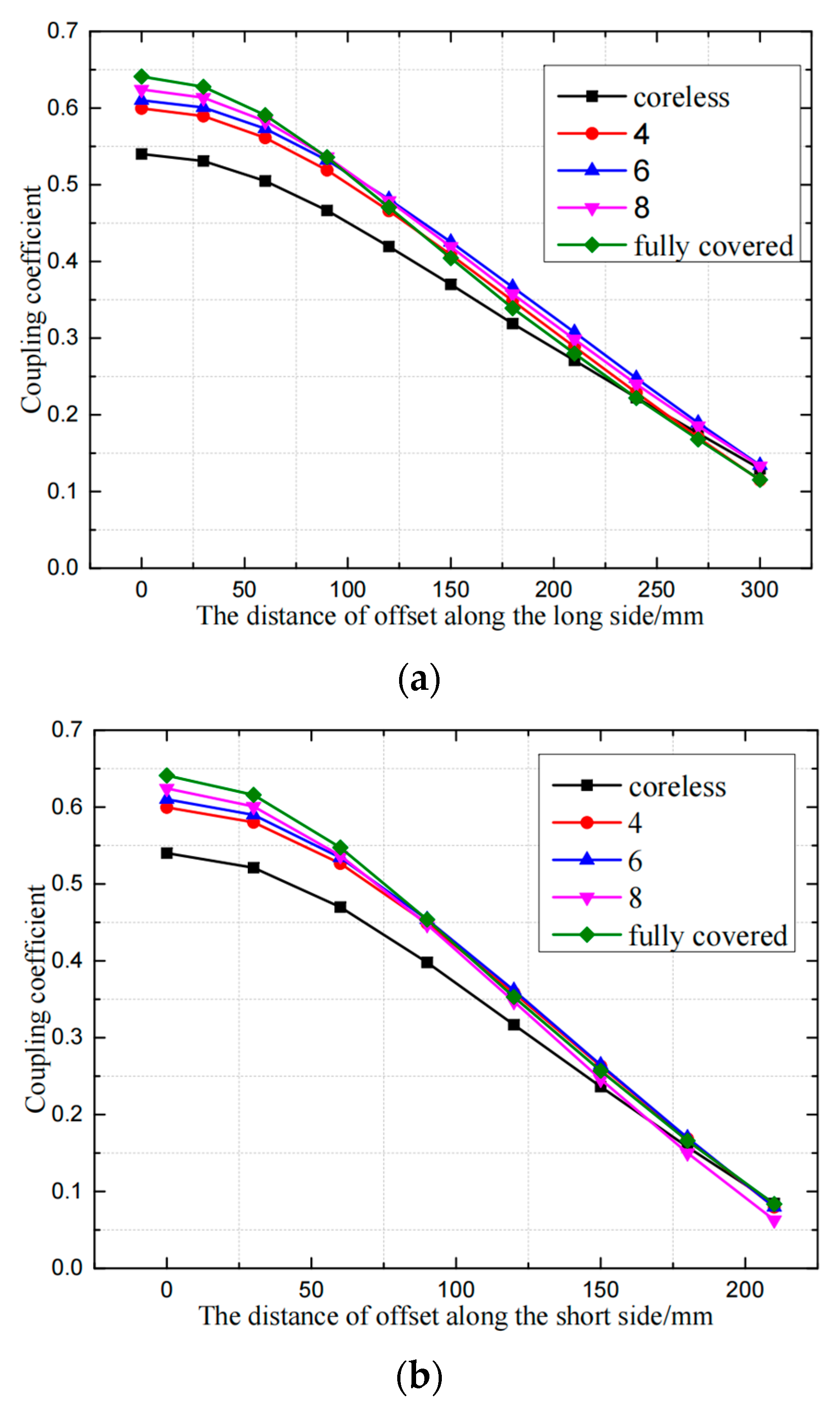
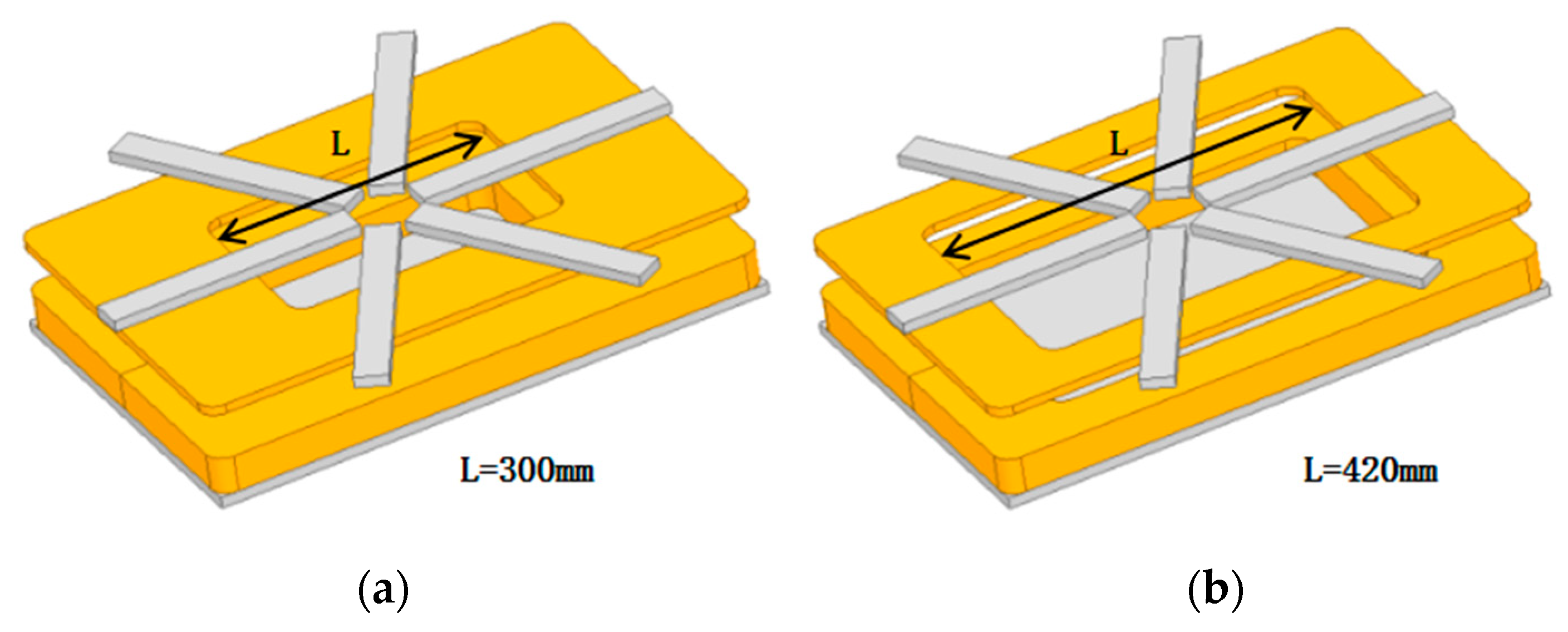
2.2. Core Distribution and Hole Size Optimization
3. Topology Design of WPT System with Constant Current Output
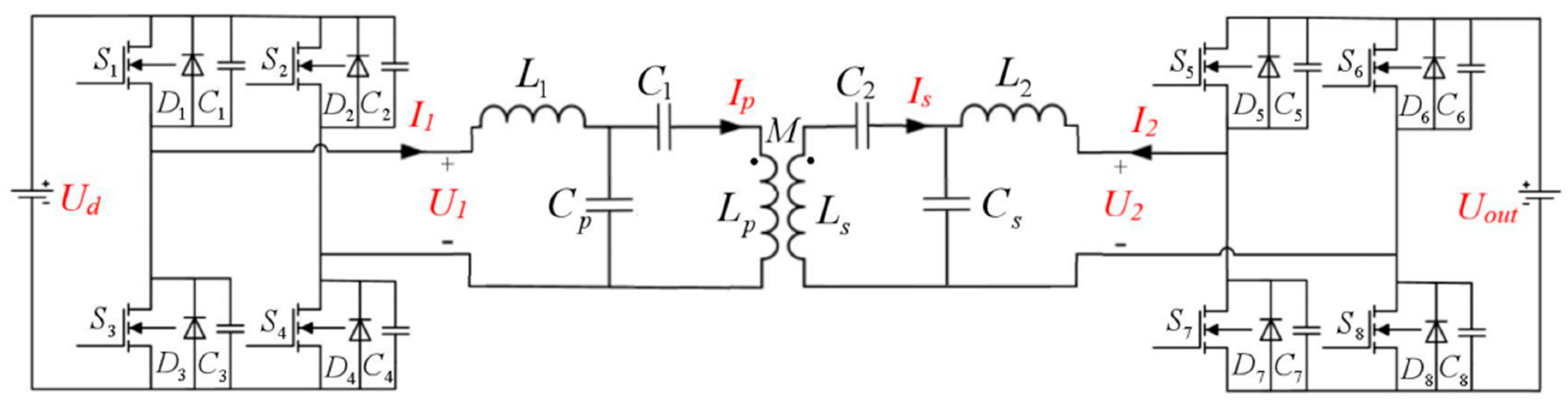
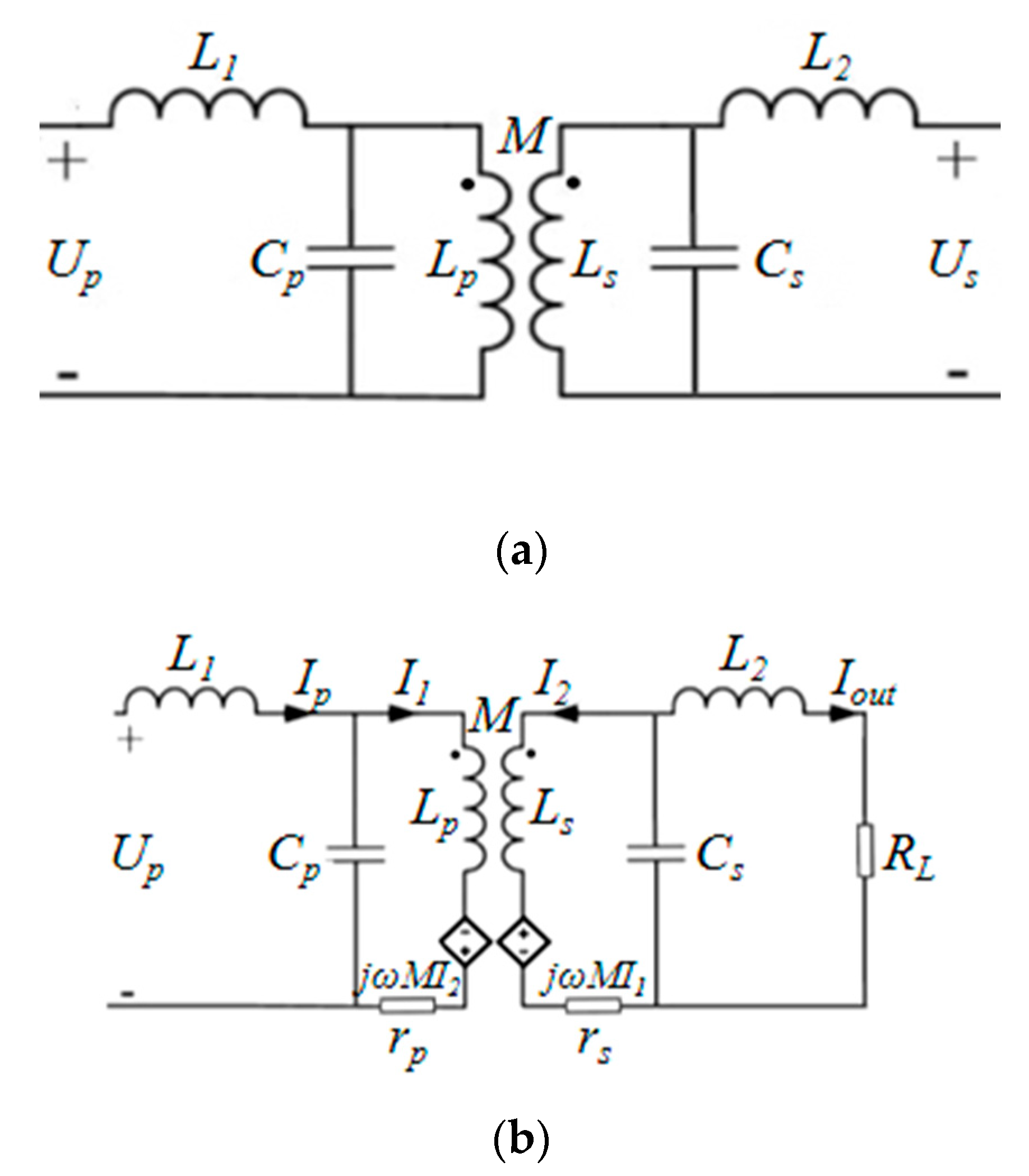
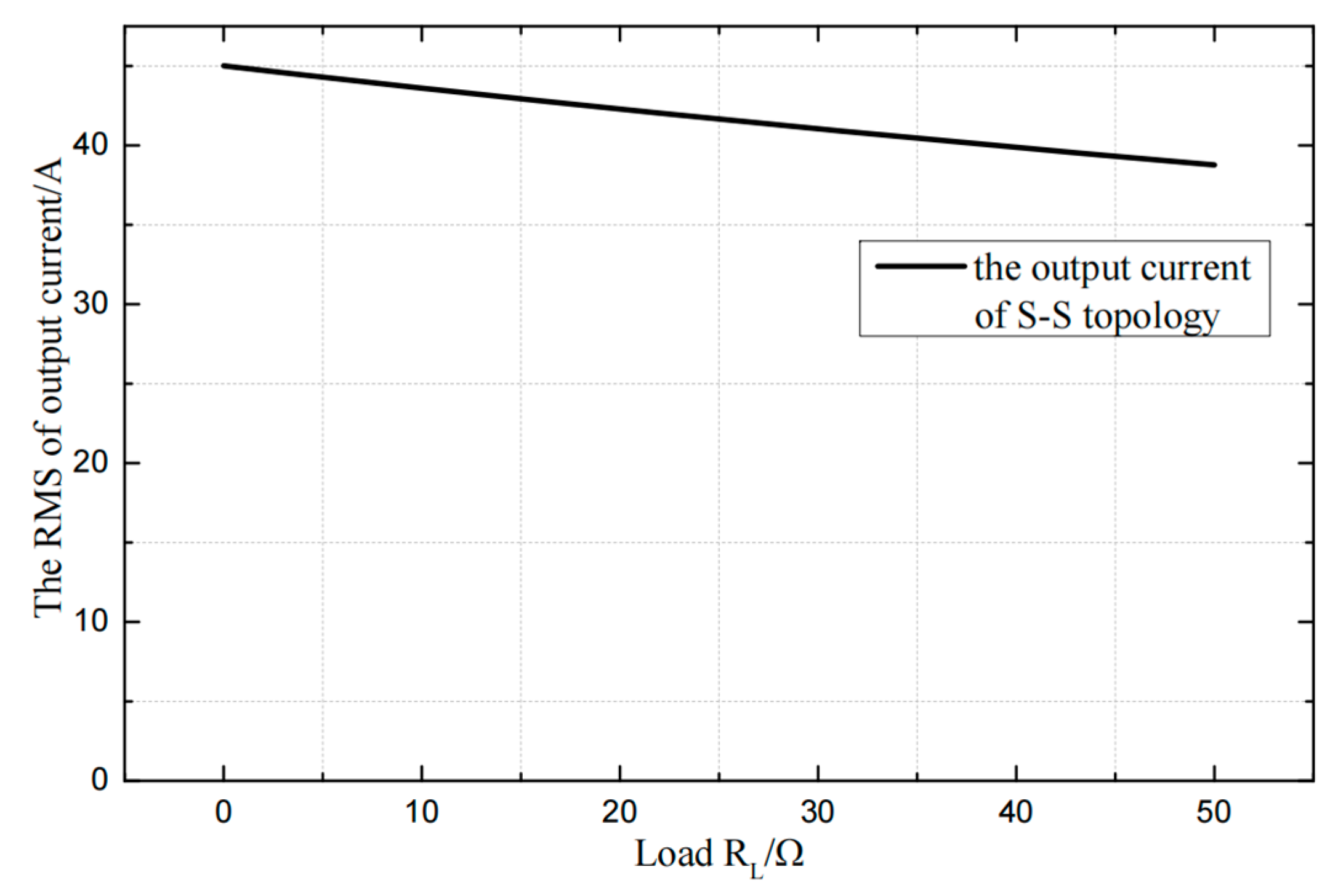
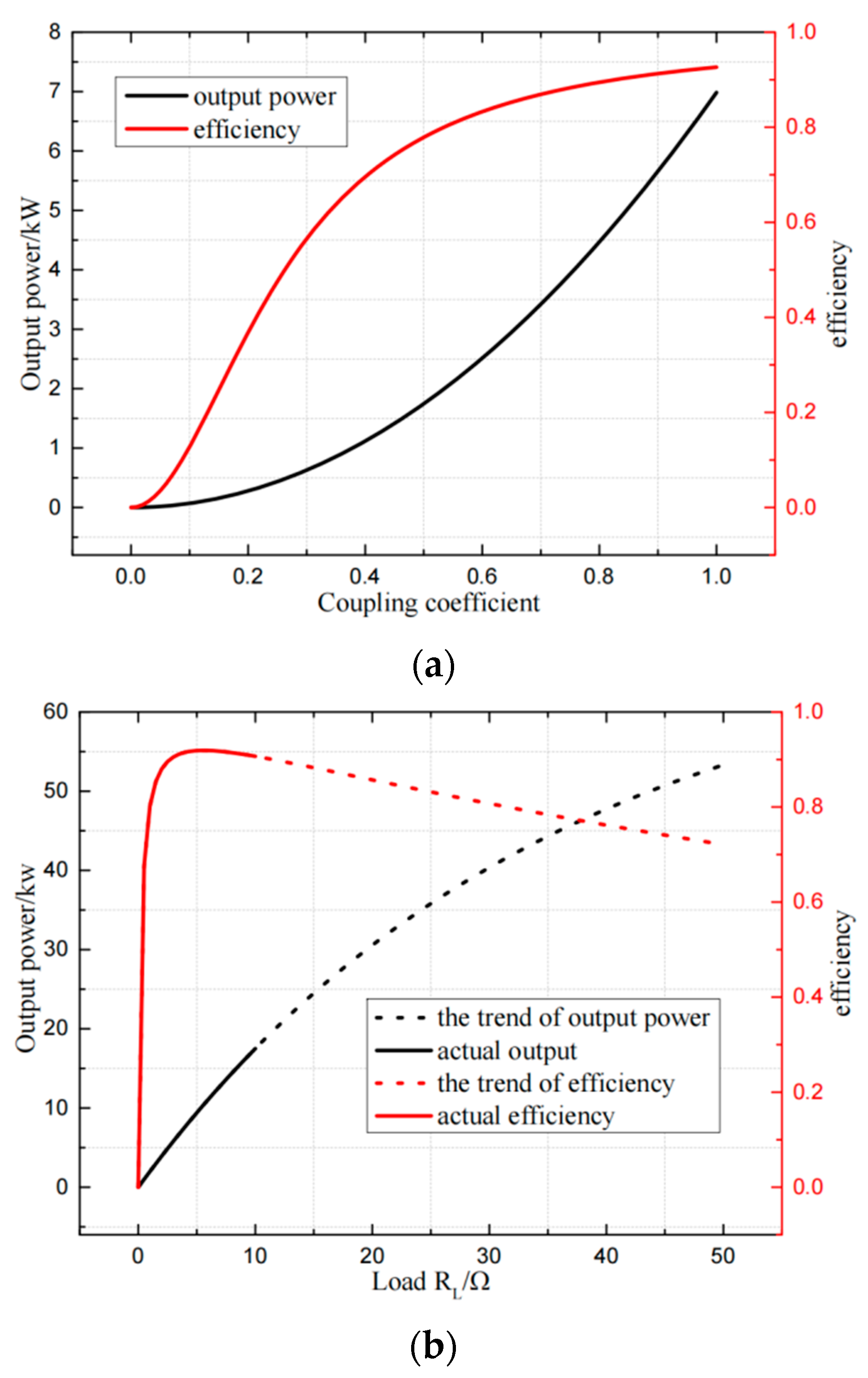
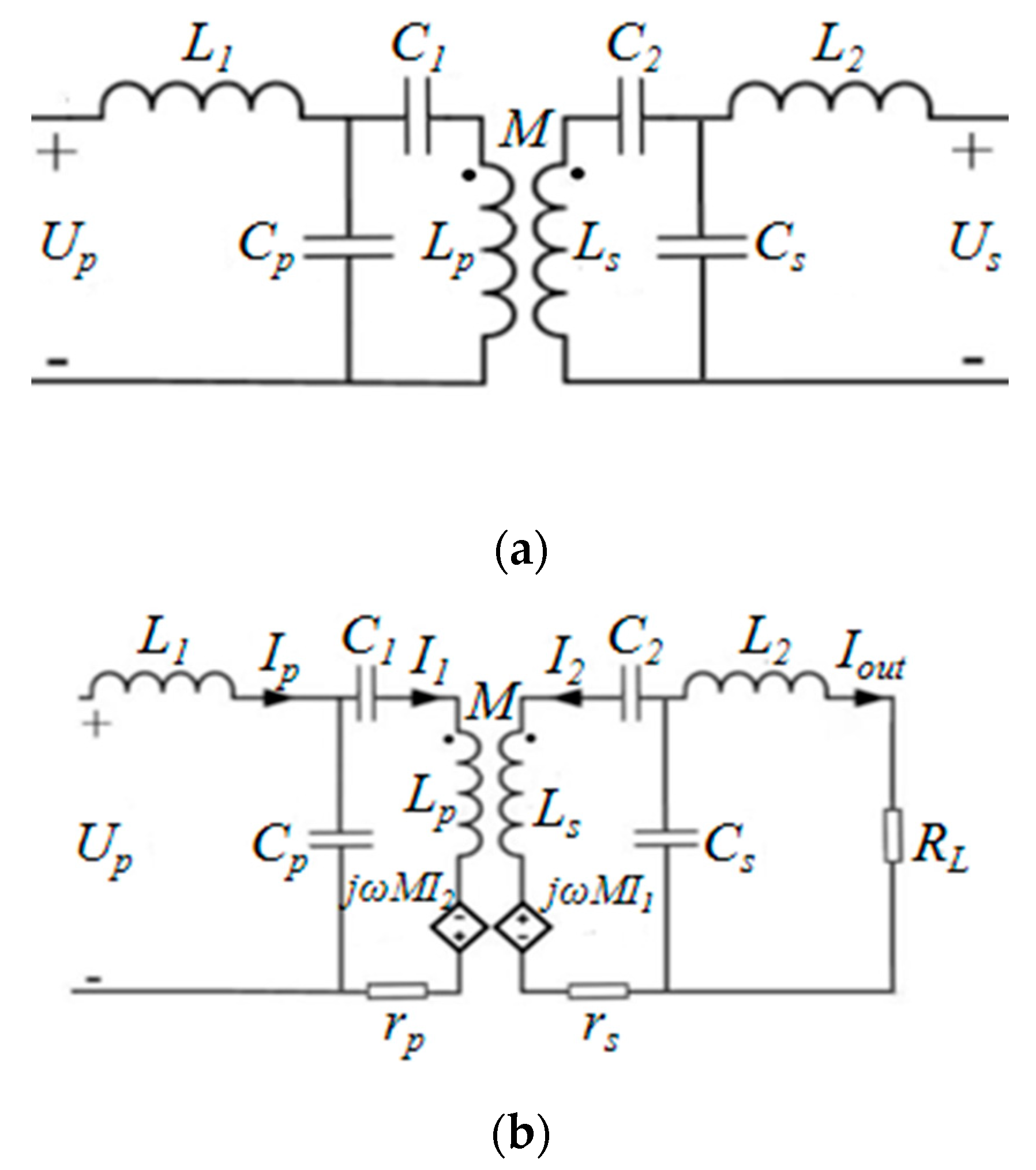
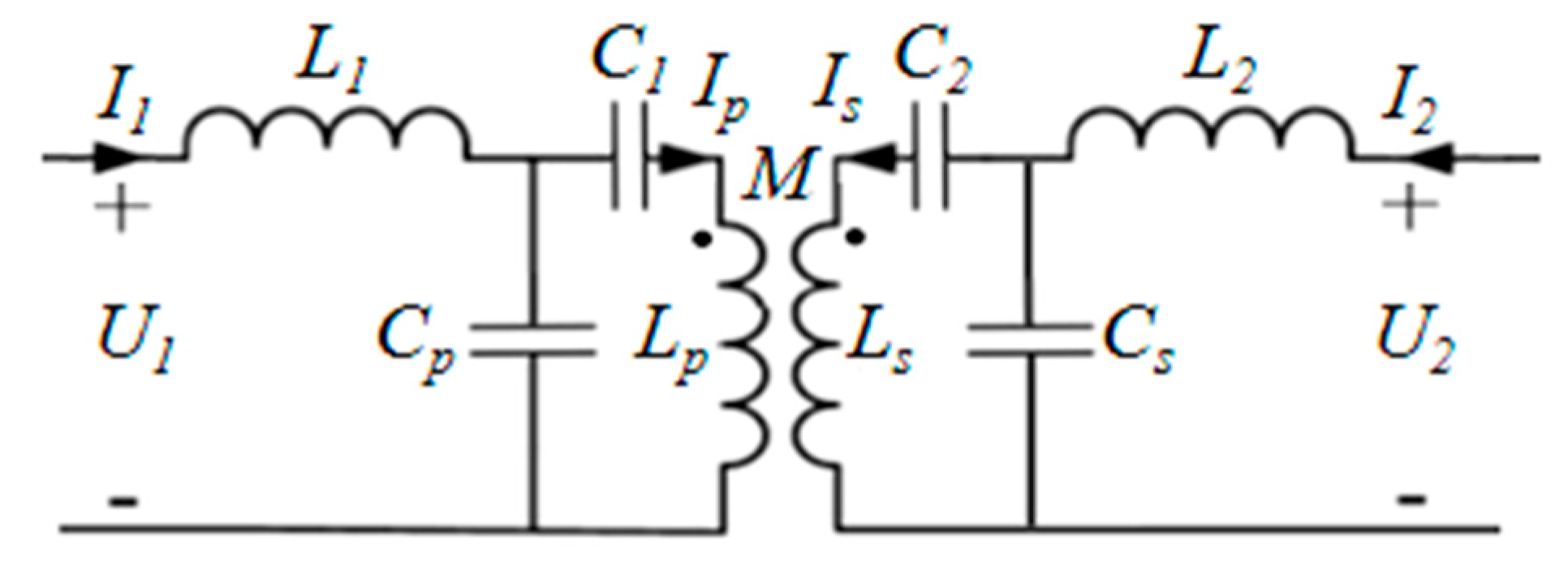
3.1. Dual-LCL Compensation Compensation and Analysis
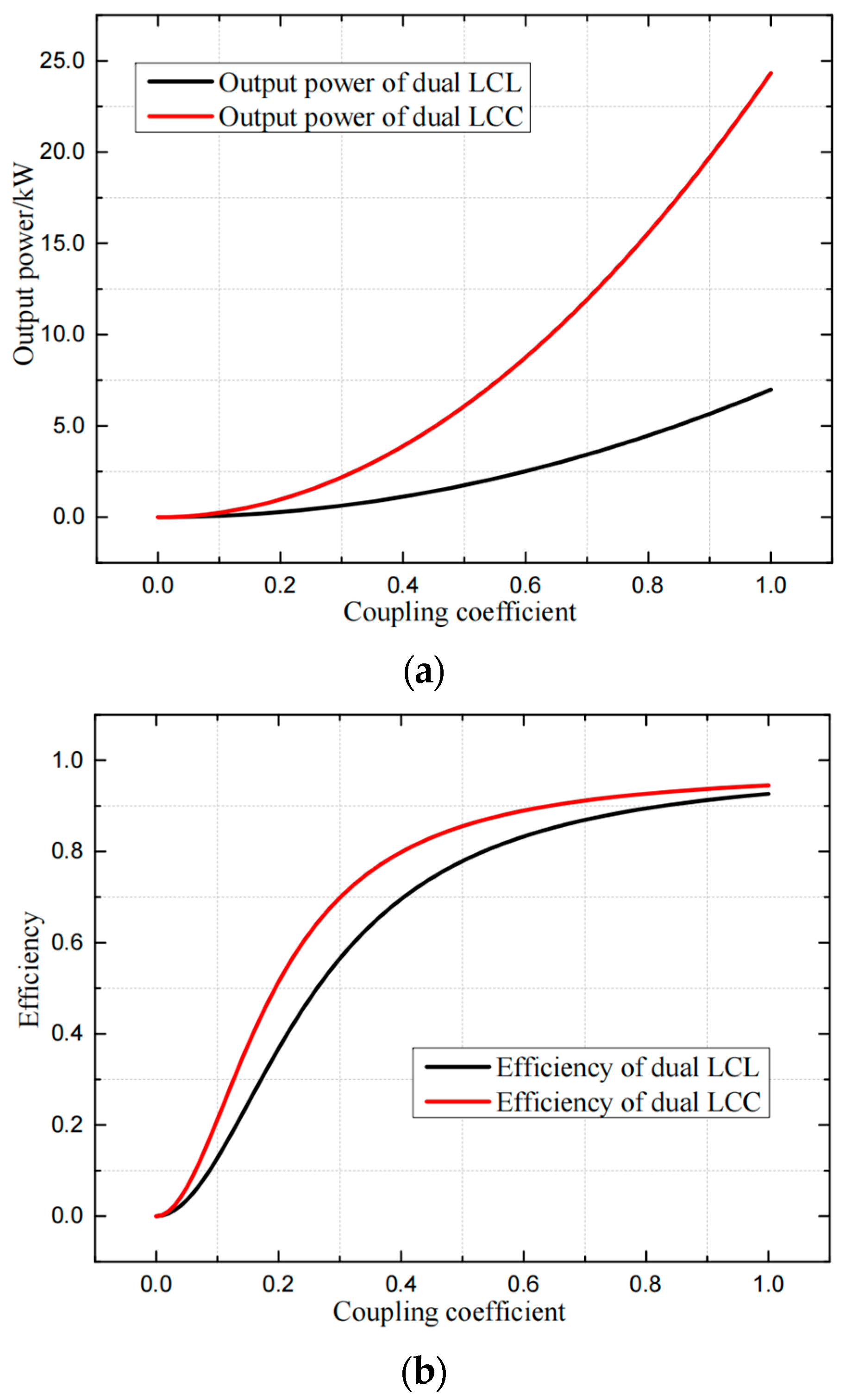
3.2. The Optimization and Improvement of Dual LCL-Dual LCC Compensation
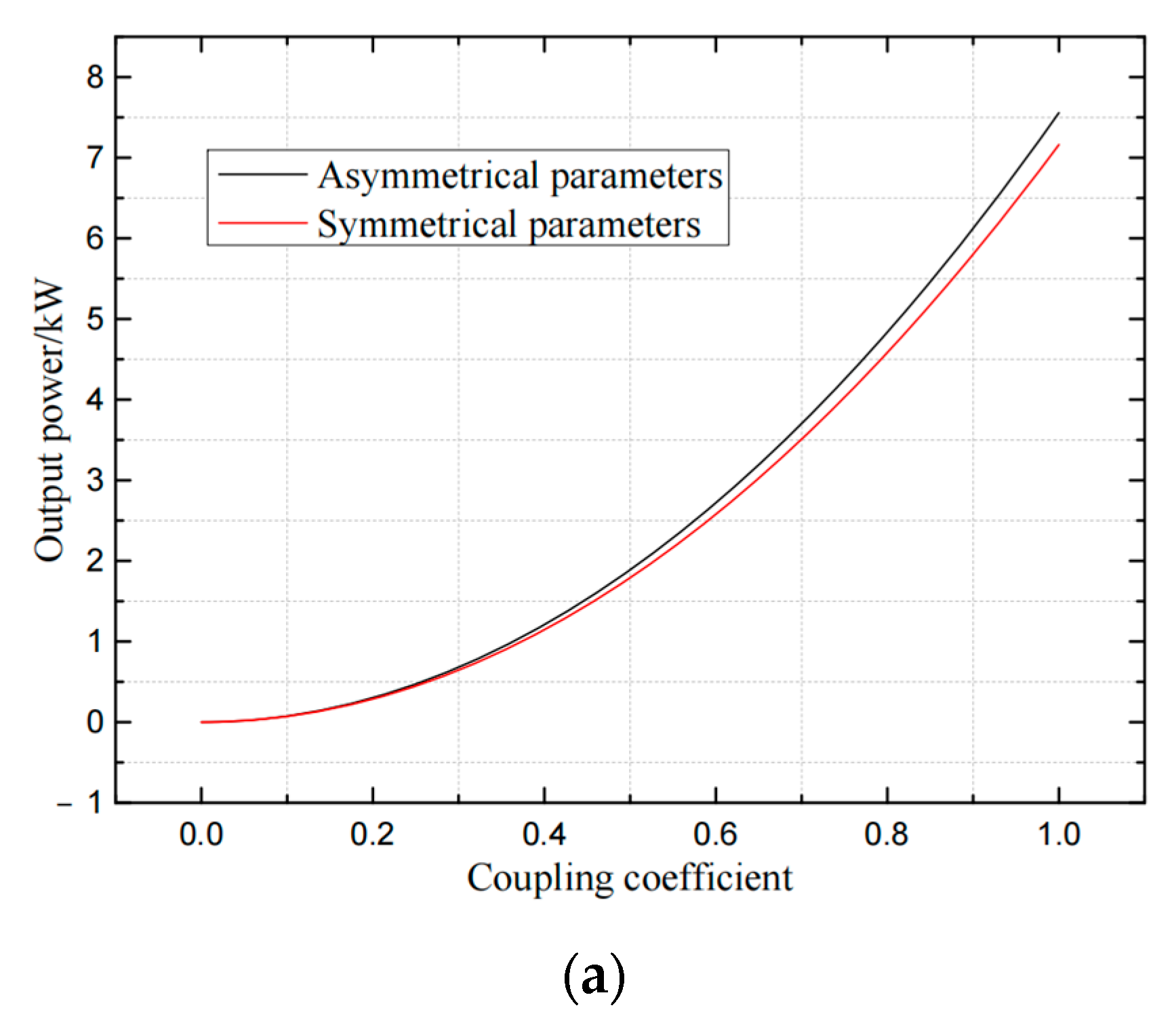
3.3. Optimization of Dual-LCC Asymmetric Loosely Coupled Transformer
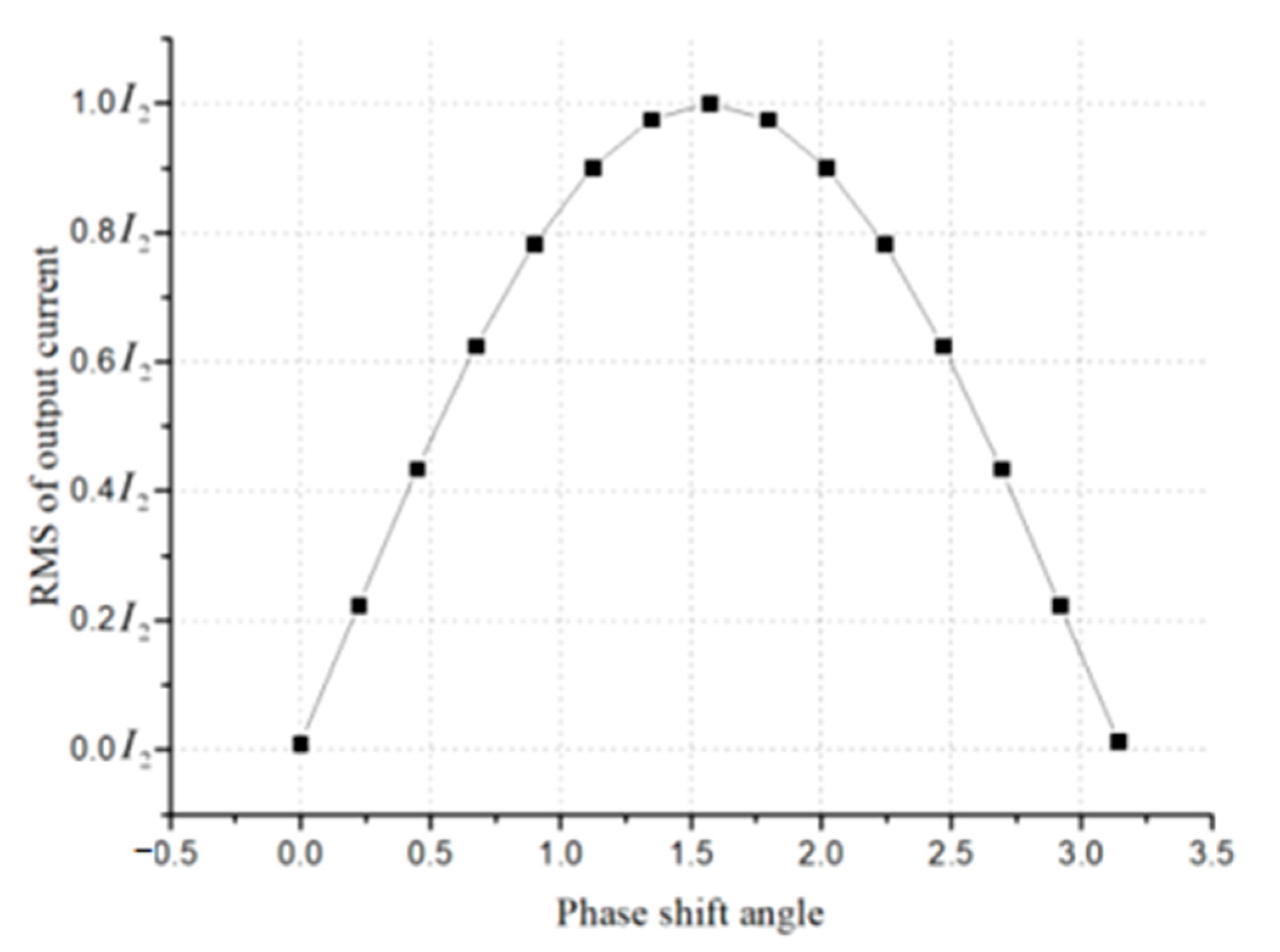
4. Phase Shift Control of Dual-LCC Wireless Power Transfer System
5. Verification of Asymmetric Loosely Coupled Transformer WPT System
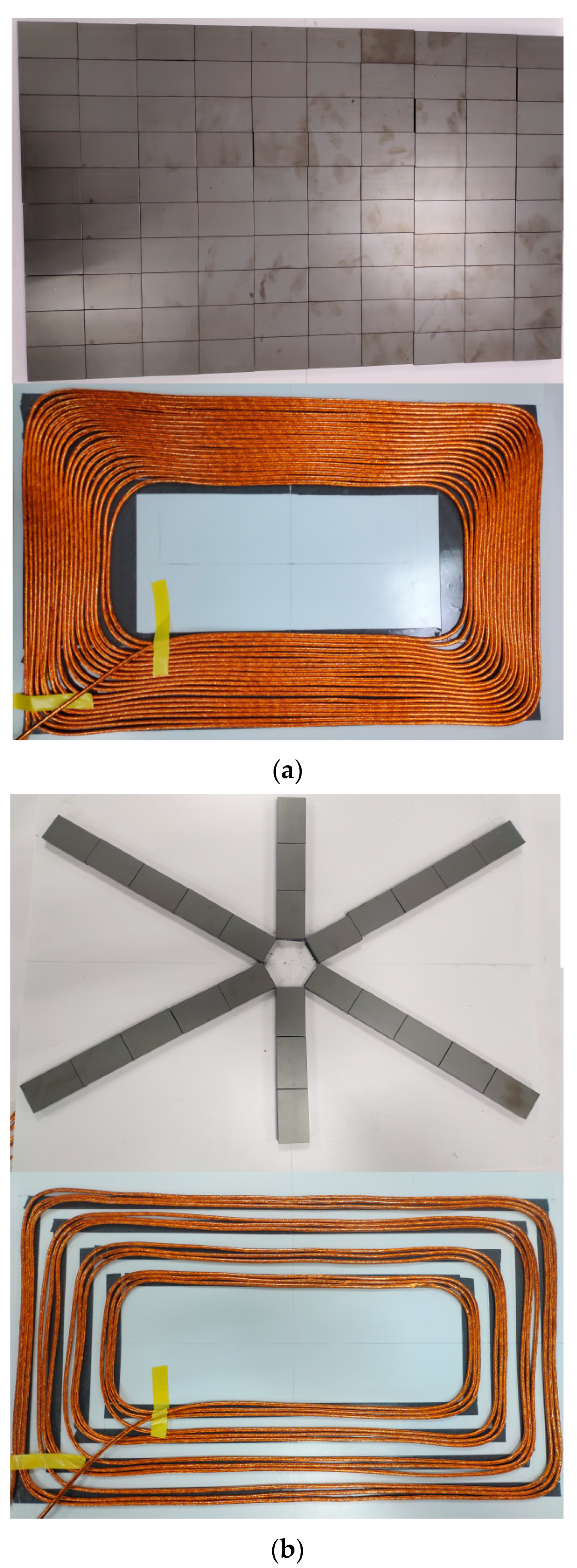
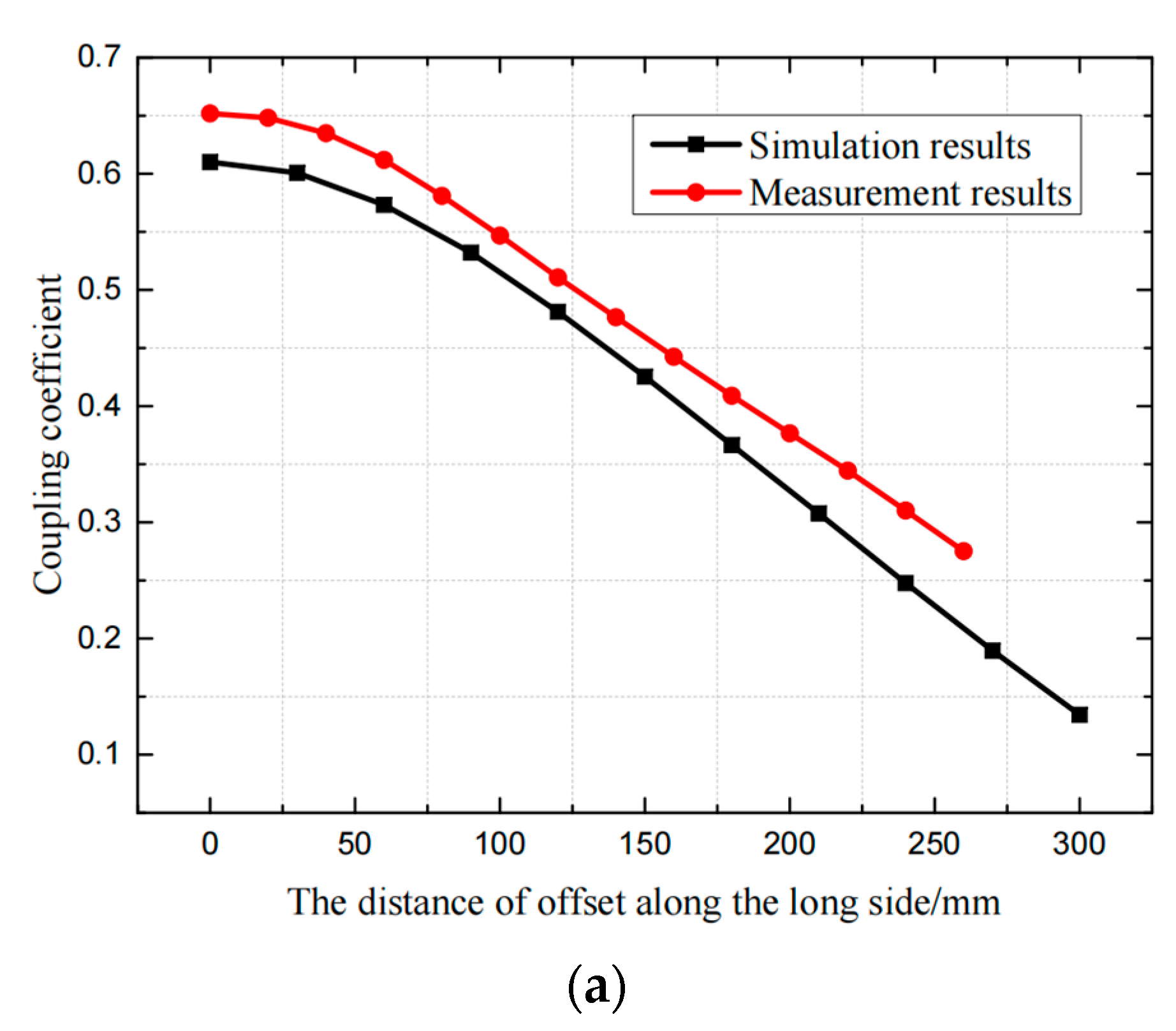
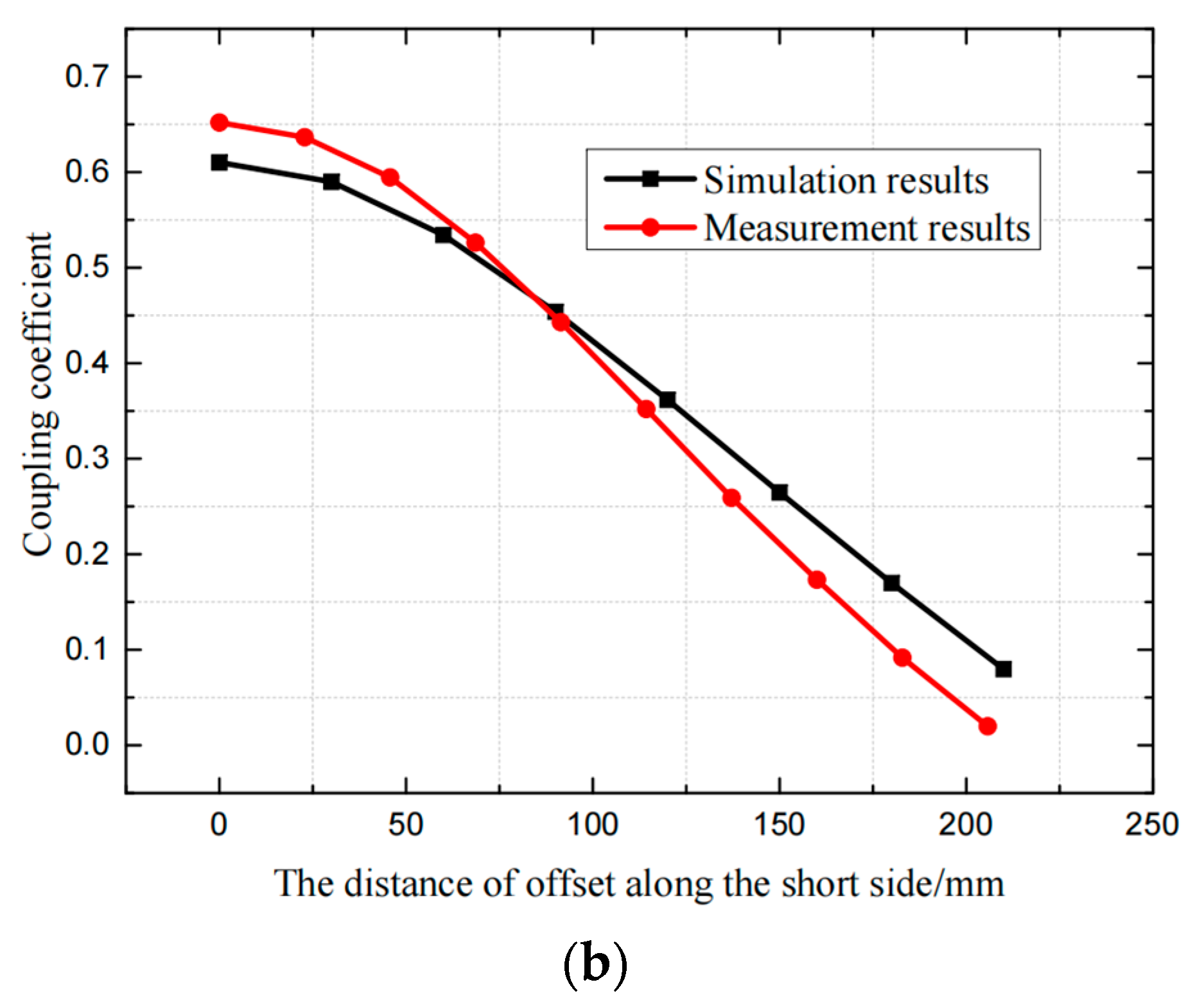
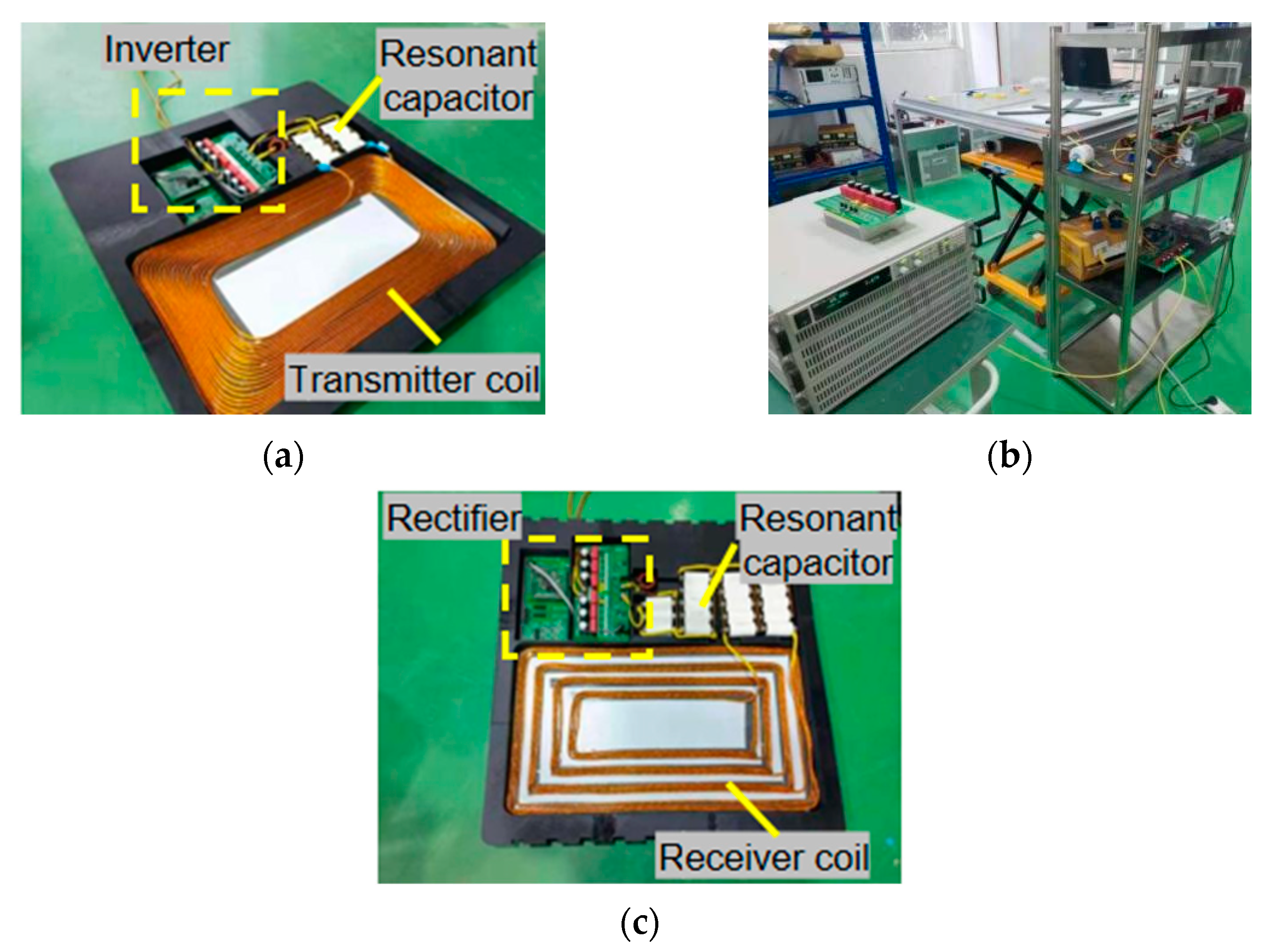
5.1. Winding and Verification of Asymmetric Magnetic Coupling Mechanism
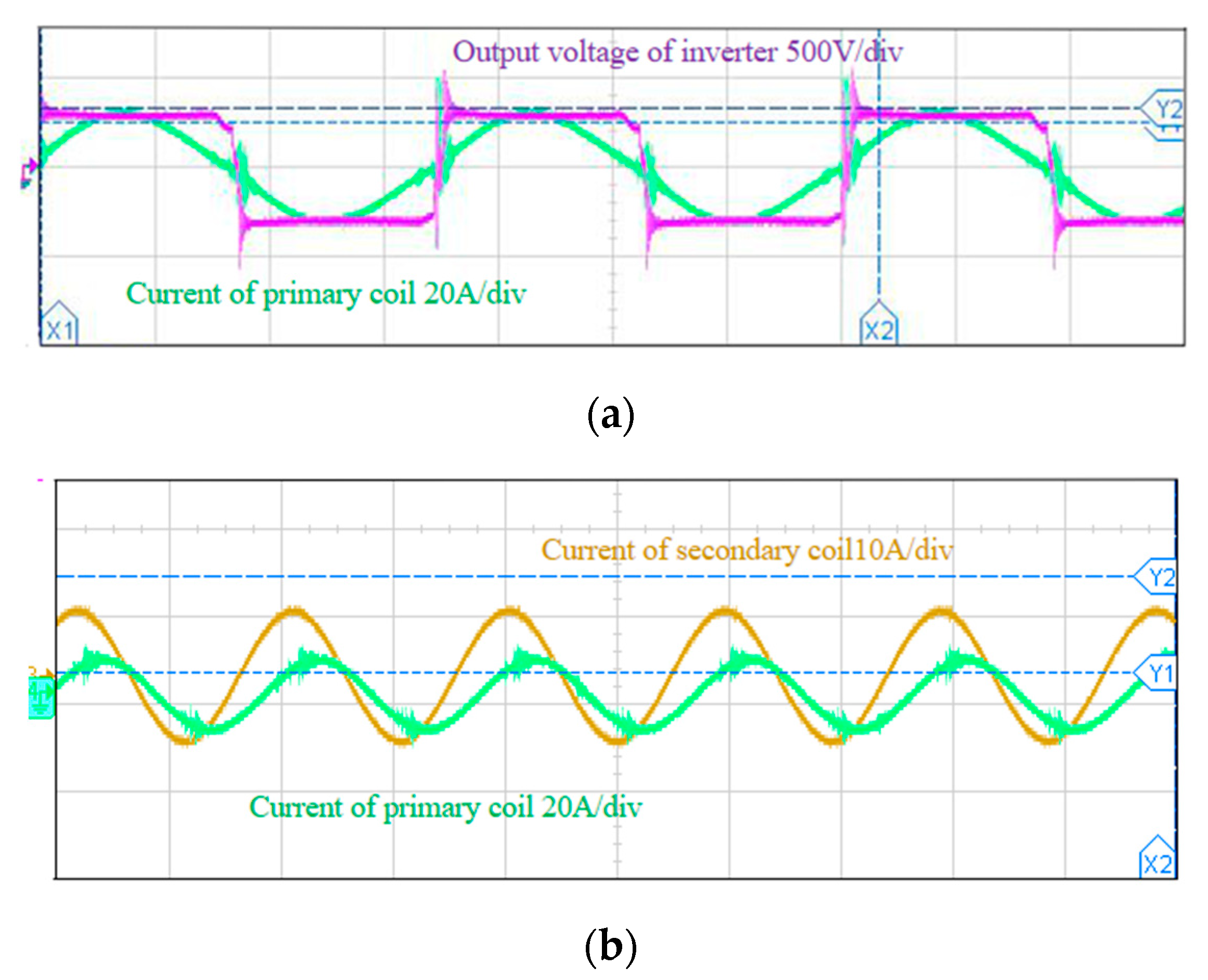
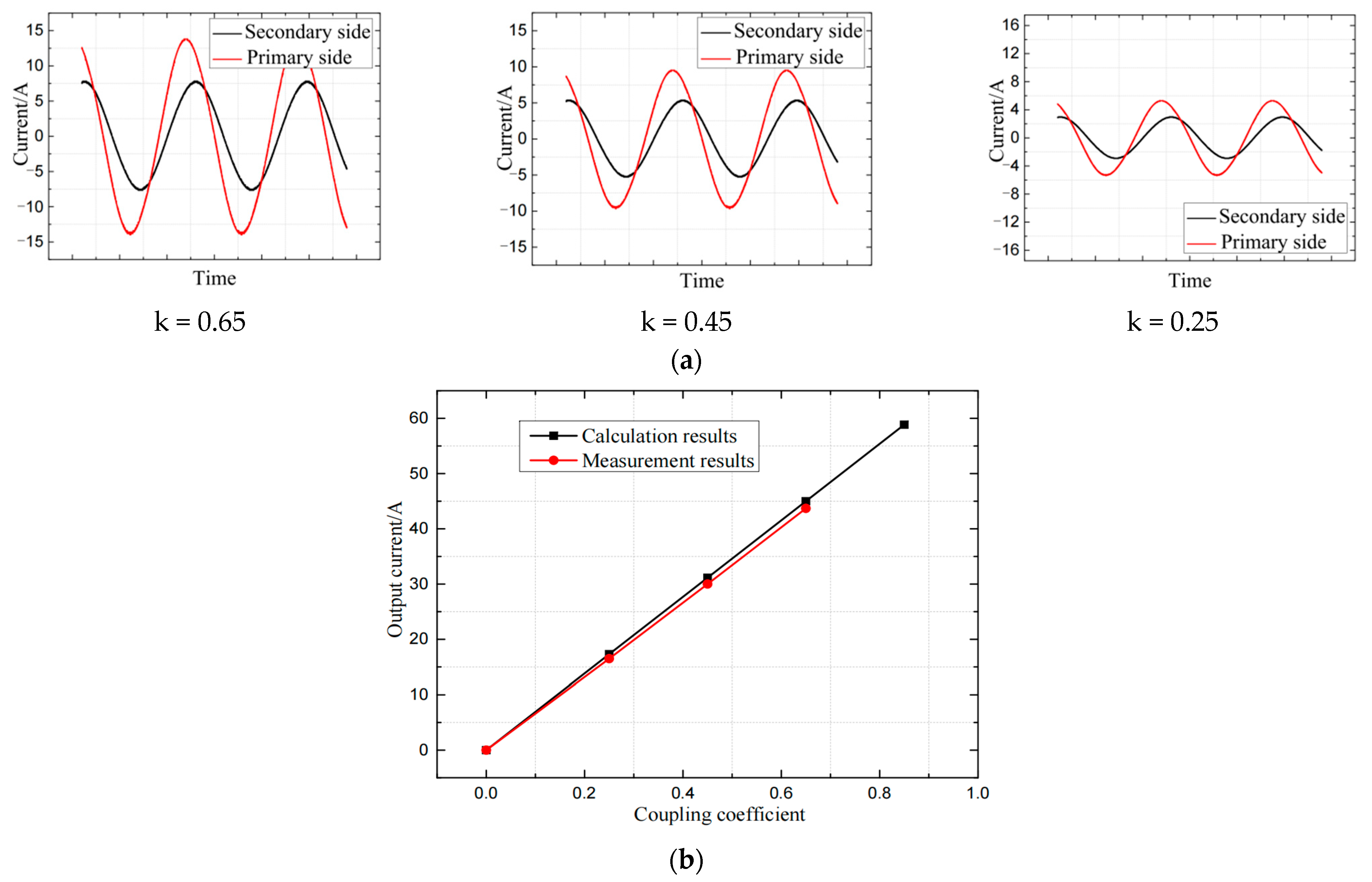
5.2. Wireless Power Transfer System Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Conflicts of Interest
References
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Lee, S.; Choi, B.; Rim, C.T. Dynamics characterization of the inductive power transfer system for online electric vehicles by Laplace phasor transform. IEEE Trans. Power Electron. 2013, 28, 5902–5909. [Google Scholar] [CrossRef]
- Sato, M.; Yamamoto, G.; Gunji, D.; Imura, T.; Fujimoto, H. Development of Wireless In-Wheel Motor Using Magnetic Resonance Coupling. IEEE Trans. Power Electron. 2016, 31, 5270–5278. [Google Scholar] [CrossRef]
- Choi, S.Y.; Gu, B.W.; Jeong, S.Y.; Rim, C.T. Advances in Wireless Power Transfer Systems for Roadway-Powered Electric Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2015, 3, 18–36. [Google Scholar] [CrossRef]
- Chai, R.; Zhang, Y. A Practical Supercapacitor Model for Power Management in Wireless Sensor Nodes. IEEE Trans. Power Electron. 2015, 30, 6720–6730. [Google Scholar] [CrossRef]
- Li, H.; Li, J.; Wang, K.; Chen, W.; Yang, X. A Maximum Efficiency Point Tracking Control Scheme for Wireless Power Transfer Systems Using Magnetic Resonant Coupling. IEEE Trans. Power Electron. 2015, 30, 3998–4008. [Google Scholar] [CrossRef]
- Mcdonough, M. Integration of inductively coupled power transfer and hybrid energy storage system: A multi-port power electronics interface for battery powered electric vehicles. IEEE Trans. Power Electron. 2015, 30, 6423–6433. [Google Scholar] [CrossRef]
- Hiramatsu, T.; Huang, X.; Kato, M.; Imura, T.; Hori, Y. Wireless charging power control for HESS through receiver side voltage control. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 1614–1619. [Google Scholar]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A comprehensive review of wireless charging technologies for electric vehicles. IEEE Trans. Transp. Electrif. 2018, 4, 38–63. [Google Scholar] [CrossRef]
- Li, Y.L.; Sun, Y.; Dai, X. Robust control for an uncertain LCL resonant ICPT system using LMI method. Control. Eng. Pract. 2013, 21, 31–41. [Google Scholar] [CrossRef]
- Tan, L.; Li, J.; Wei, B.; Wang, S.; Huang, X.; Liu, H.; Tang, Z. Research on Middle-Distance Wireless Power Transmission Systems Based on Electromagnetic Metamaterial. In Proceedings of the 2019 IEEE 2nd International Conference on Electronics Technology (ICET), Chengdu, China, 10–13 May 2019; pp. 464–467. [Google Scholar]
- Chen, W.; Chen, Q.; Huang, J.; Zhang, H. Analysis and Research of Distance Transmission Characteristics of Magnetic Resonance WPT System. In Proceedings of the 2014 IEEE 79th Vehicular Technology Conference (VTC Spring), Seoul, Korea, 18–21 May 2014; pp. 1–5. [Google Scholar]
- Cheng, C.; Lu, F.; Zhou, Z.; Li, W.; Zhu, C.; Zhang, H.; Deng, Z.; Chen, X.; Mi, C.C. Load-Independent Wireless Power Transfer System for Multiple Loads Over a Long Distance. IEEE Trans. Power Electron. 2019, 34, 9279–9288. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Guo, Y.; Tao, C. Null-Coupled Magnetic Integration for EV Wireless Power Transfer System. IEEE Trans. Transp. Electrif. 2019, 5, 968–976. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Hofmann, H.; Mi, C. A dynamic charging system with reduced output power pulsation for electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6580–6590. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Shin, C.-S.; Jo, C.-H.; Park, S.-J.; Kim, D.-H. An Efficiency Optimization-Based Asymmetric Tuning Method of Double-Sided LCC Compensated WPT System for Electric Vehicles. IEEE Trans. Power Electron. 2020, 35, 11475–11487. [Google Scholar] [CrossRef]
- Li, S.; Guo, Y.; Tao, C.; Li, F.; Wang, L.; Bo, Q. Analysis of the input impedance of the rectifier and design of LCC compensation network of the dynamic wireless power transfer system. IET Power Electron. 2019, 12, 2678–2687. [Google Scholar] [CrossRef]
- Zhang, X.; Kan, T.; You, C.; Mi, C. Modeling and Analysis of AC Output Power Factor for Wireless Chargers in Electric Vehicles. IEEE Trans. Power Electron. 2016, 32, 1481–1492. [Google Scholar] [CrossRef]
- Lu, F.; Zhang, H.; Hofmann, H.; Mi, C. A high efficiency 3.3 kW loosely-coupled wireless power transfer system without magnetic material. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 September 2015; pp. 2282–2286. [Google Scholar]
- He, G.; Chen, Q.; Xin, P.; Chen, X. Analysis, and correction of soft switching missing phenomenon in high coupling coefficient WPT system. In Proceedings of the 2017 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Piscataway, NJ, USA, 20–22 May 2017; pp. 1–6. [Google Scholar]
- Zhang, W.; White, J.C.; Abraham, A.M.; Mi, C.C. Loosely Coupled Transformer Structure and Interoperability Study for EV Wireless Charging Systems. IEEE Trans. Power Electron. 2015, 30, 6356–6367. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, Y.; Eldeeb, H.H.; Zhan, Y.; Xu, G.; Mohammed, O.A. Design of Loosely Coupled Transformer of Wireless Power Transfer for Higher Misalignment Tolerance of System Efficiency. In Proceedings of the 2019 IEEE Energy Conversion Congress and Exposition (ECCE), Baltimore, MD, USA, 29 September–3 October 2019; pp. 4569–4574. [Google Scholar]
- Durmus, F.; Karagol, S. Mutual Inductance Calculation Formula for Planar Square Coils. In Proceedings of the 2018 2nd International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 19–21 October 2018; pp. 1–5. [Google Scholar]
- Lin, F.; Covic, G.A.; Boys, J.T. Evaluation of magnetic pad sizes and topologies for electric vehicle charging. IEEE Trans. Power Electron. 2015, 30, 6391–6407. [Google Scholar] [CrossRef]
- Budhia, M.; Covic, G.A.; Boys, J.T. Design and optimisation of magnetic structures for lumped Inductive Power Transfer systems. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 2081–2088. [Google Scholar]
- Shin, Y.; Kim, H.; Park, J.; Park, B.; Woo, S.; Huh, S.; Park, C.; Ahn, S. A LCL-LCL Topology for Odd Harmonic Magnetic Fields Reduction in Over-Coupled WPT System. In Proceedings of the 2020 International Symposium on Electromagnetic Compatibility—EMC EUROPE, Rome, Italy, 23–25 September 2020; pp. 1–5. [Google Scholar]
- Jenson, J.; Therattil, J.P.; Johnson, J.A. A Novel LCC-LCL Compensation WPT System for Better Performance. In Proceedings of the 2019 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 20–22 February 2019; pp. 1–6. [Google Scholar]
- Zhao, Q.; Wang, A.; Liu, J.; Wang, X. The Load Estimation and Power Tracking Integrated Control Strategy for Dual-Sides Controlled LCC Compensated Wireless Charging System. IEEE Access 2019, 7, 75749–75761. [Google Scholar] [CrossRef]
- Li, H.; Xu, J.; Gao, F.; Zhang, Y.; Yang, X.; Tang, H. Duty Cycle Control Strategy for Dual-Side LCC Resonant Converter in Wireless Power Transfer Systems. IEEE Trans. Transp. Electrif. 2021, 8, 1944–1955. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference Number | Coil Type | Coil Size | Transmission Distance/mm | Transmission Power/kW | Efficiency |
|---|---|---|---|---|---|
| [14] | DD | 580 mm × 420 mm | 200 | 3 | 90.8% |
| [15] | Dynamic DD | / | 150 | 1.4 | 89% |
| [16] | Rectangle | 540 mm × 675 mm | 150 | 6.6 | 91% |
| [18] | Rectangle | / | 150 | 1.5 | 91.75% |
| Magnetic Coupling Mechanism | ||
|---|---|---|
| Asymmetrical | Symmetrical | |
| Lp | 371.8 uH | 206.06 uH |
| Ls | 114.2 uH | 206.06 uH |
| k | 0.652 | 0.652 |
| Resonant capacitors, inductors | ||
| Cp | 68 nF | 94.3 nF |
| C1 | 10 nF | 20.8 nF |
| Cs | 130 nF | 94.3 nF |
| C2 | 50 nF | 20.8 nF |
| L1 | 52 uH | 37.5 uH |
| L2 | 27 uH | 37.5 uH |
| Magnetic Coupling Mechanism | |
|---|---|
| Transmission distance | 50 mm |
| Lp | 371.8 uH |
| Ls | 114.2 uH |
| k | 0.652 |
| System parameters | |
| Resonant frequency | 85 kHz |
| Resonant capacitors, inductors | |
| Cp | 68 nF |
| C1 | 10 nF |
| Cs | 130 nF |
| C2 | 50 nF |
| L1 | 52 uH |
| L2 | 27 uH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Zhou, J.; Yang, A.; Gao, J.; Li, Q. A Constant Current Wireless Power Transfer Scheme with Asymmetric Loosely Coupled Transformer for Electric Forklift. Electronics 2022, 11, 1845. https://doi.org/10.3390/electronics11121845
Liu X, Zhou J, Yang A, Gao J, Li Q. A Constant Current Wireless Power Transfer Scheme with Asymmetric Loosely Coupled Transformer for Electric Forklift. Electronics. 2022; 11(12):1845. https://doi.org/10.3390/electronics11121845
Chicago/Turabian StyleLiu, Xuecheng, Jing Zhou, Aixi Yang, Jian Gao, and Qiang Li. 2022. "A Constant Current Wireless Power Transfer Scheme with Asymmetric Loosely Coupled Transformer for Electric Forklift" Electronics 11, no. 12: 1845. https://doi.org/10.3390/electronics11121845
APA StyleLiu, X., Zhou, J., Yang, A., Gao, J., & Li, Q. (2022). A Constant Current Wireless Power Transfer Scheme with Asymmetric Loosely Coupled Transformer for Electric Forklift. Electronics, 11(12), 1845. https://doi.org/10.3390/electronics11121845