1. Introduction
With the rapid development of smart grids and new energy generation, a large number of nonlinear devices [
1] are being applied in the power systems, leading to an increase in harmonics, interharmonics, and DDC components in power grids [
2]. On one hand, harmonics and interharmonics have spectral interference with the frequency of interest [
3], which affects the measurement accuracy of the electrical energy in the networks [
4]. On the other hand, when a fault occurs in the power system, the attenuated DC components of electrical signals cannot be filtered out using traditional algorithms and thus leads to large errors in the calculation results. Therefore, effective phase estimation algorithms [
5] are needed to accurately measure the wideband dynamic phase [
6].
Currently available phase measurement methods can be divided into two main categories: the discrete Fourier transform (DFT) algorithms [
7,
8,
9] and non-DFT algorithms. A DFT algorithm is based on equally spaced sampling of the spectrum of a discrete signal in the finite time domain and discretization of the frequency domain function. When the traditional DFT transform algorithm is used to measure the phase, the actual frequency shift results in information redundancy, mutual harmonic interference [
8], and information leakage, which cause large measurement errors. Some studies have proposed to introduce over-zero detection method, wavelet transform method, and instantaneous value method [
10] to optimize the DFT algorithm. However, these types of methods still have large errors at non-nominal frequencies. The study presented in [
11] describes the application of an improved second harmonic filtering technique for single-phase phase measurements at non-nominal frequencies. The method can integrate uniform sampling and fixed-window-length phase measurement with a good performance without changing the structure of the conventional phase estimation method. However, the DFT-based phase estimation algorithm under the static model offers a poor dynamic performance.
To eliminate the disadvantage that the DTF model is limited to static signal analysis only, some investigations propose to extend the dynamic phase estimation [
12,
13,
14,
15,
16,
17,
18,
19,
20,
21] to a different mathematical framework, which step up a new generation of phase measurement methods. Such methods apply a specific mathematical model to define the amplitude and phase variations of the signal over a stable sampling interval that is free from the limitations of the period in Fourier analysis.
Currently, dynamic harmonic analysis methods, such as Taylor–Fourier transform (TFT), can achieve phase estimation in the presence of power oscillations, but are susceptible to interference from interharmonics and higher harmonics [
12]. In the literature [
13], a dynamic harmonic synchronization algorithm based on interpolation function is proposed which broadens the frequency range of TFT and overcomes the limitation of DFT periodicity. However, the method has several complex system parameters and there is a problem of large error after multiple fitting, and the measurement error increases with the increase of the order. The DFT interpolation method with high resolution is proposed in [
14], which greatly improves the estimation accuracy. This algorithm has the ability to recover the stage information and suppress the noise by blocking the number of iterations. However, the DFT sequence in this method can only be re-sampled at the nominal rate, which undoubtedly adds uncertainty to the effect.
Based on the above-mentioned methods, the matrix transformation coefficients are obtained by inverse operations of higher-order matrices [
15]. Although a number of efficient error reduction algorithms are available, still they cannot address the effects of the superposition of harmonics and noise at higher orders. Thus, machine learning algorithms [
16,
17,
18] are considered to reduce the computational complexity of the phase solution. The literature [
17] limits the effect of interharmonics by identifying the most relevant components of the signal and effectively tracking the harmonics for modeling estimation. However, this methodology is only applicable to low frequency band harmonic vectors. Furthermore, the phase estimation parameters cannot be obtained directly due to the time-varying nature of higher harmonic signals and the high complexity of solving the higher order pseudo-inverse matrices. Considering the field of dynamic harmonic analysis, the work presented in [
18] uses the STWLS algorithm for iterative estimation of harmonic parameters and compensates the effect of harmonic parameters on the estimation. This method can improve the frequency measurement accuracy and allocate more space for dynamic information, but it is still difficult to avoid the interference of inter-constrained harmonics. In the literature [
19], O-sample dynamic harmonic analysis is proposed, which reduces the computational complexity of DTTFT in closed form and provides the best data compression algorithm for oscillations. However, under non-ideal conditions, the interharmonic interference becomes more and more severe as the order increases due to the large noise in the spatial step reconstruction process.
To solve the synchronous phase estimation solution problem, the study presented in [
20] proposes the complex wavelet transform based on the fast Fourier transform (FFT) algorithm to segment the original waveform and perform the signal reconstruction. However, in continuous multiscale analysis, this may lead to severe phase distortion and loss of time information for the next steps of signal processing. In [
21], the estimation of frequency, amplitude, and phase in harmonics are obtained by improving the Taylor weighted least squares algorithm. As this method is only applicable to measure third-order continuous waves but not to high-precision harmonic analysis, the algorithm is still not applicable for the measurement of higher-order harmonics.
To address the aforementioned problems, this paper firstly uses Sinc interpolation function to parameterize the attenuated DC component, and uses the least square method to rapidly fit the DDC component in the signal with high precision within the time required by PMU. This method has the advantages of high estimation accuracy and fast response time, which provides reliable research help for the existing DDC component detection. Then, for broadband harmonic component estimation, an improved Taylor–Fourier model is used which is combined with a machine learning algorithm for accurate recovery of a specific signal with fewer data points. This in turn transforms the harmonic phase reconstruction problem into a sparse acquisition model solving problem. In the regularization-based framework, this paper formulates the phase reconstruction problem as a minimization function. The above underdetermined inverse problem is efficiently solved by using the iterative minimization operation in the SBI system, thereby obtaining the harmonic phase estimation efficiently and accurately. To justify the model, the cross-entropy objective function is used to evaluate the error range of the estimates. The simulation results show that the algorithm has high accuracy and speed in estimating the dynamic phase for wide frequency, and maintains a certain superiority among the compared algorithms. The dynamic performance and anti-interference capability of the algorithm are also validated.
4. Simulation Analysis
In this section, the results of the proposed wideband dynamic phasor measurement algorithm (BMP) proposed are discussed considering different test scenarios. Four algorithms compared in this paper are: FFT algorithm [
27], Prony algorithm [
28], Taylor weighted least squares (TWLS) algorithm [
21], and Sinc interpolation function based dynamic simultaneous phase measurement (SIFE) algorithm [
13]. Test scenarios include basic performance test, frequency ramp test, step transform test, and interference test.
To compare the estimation effects of different methods, the total phase error (TVE) is determined to describe the relative deviation between the theoretical phase and the estimated phase. TVE is closely related to the amplitude error and phase angle error, but cannot reflect the variation of a single aspect alone. Therefore, this paper also suggests two metrics: frequency error (FE) and absolute rate of change of frequency error (RFE) to comprehensively evaluate the effect of phase estimation. Measurement requirements for M class PMU [
29] are selected as the limits for different operating conditions according to the IEEEC 37.118.1 standard.
All five algorithms use the same rectangular observation window with a fundamental frequency bandwidth of 1 Hz. The sampling window length is set to 5 working frequency cycles. Taking into account the complexity of the algorithm and the accuracy of the algorithm, the value of is set to 20, to improve the frequency domain resolution.
4.1. Basic Performance Test
In order to test the basic performance of the proposed algorithm, the wideband dynamic signal model with DDC components is constructed by using:
where
is the fundamental frequency which is set to 50 Hz,
and
denote the fundamental and each harmonic phase angle, respectively. This value of frequency is chosen arbitrarily in the
range. The number of harmonics
h in the low frequency band is taken as 2–13 and in the high frequency band
h is taken as 77, 79, 80, and 83, respectively. The sampling frequency is set to 10 kHz. The values of the DDC component amplitude
are taken as 0.3, 0.4, 0.5, …1. The time constant
of the DDC component starts from 0.01 s and varies in steps of 0.01 s to 0.1 s.
When applying the BMP algorithm, iterating the initial value of the phase
, the regularization factor is considered as
. For the fixed-value parameters
,
,
, ζ can vary in the range [0.05, 0.3]. The number of data points that are best matched in the search window is set to
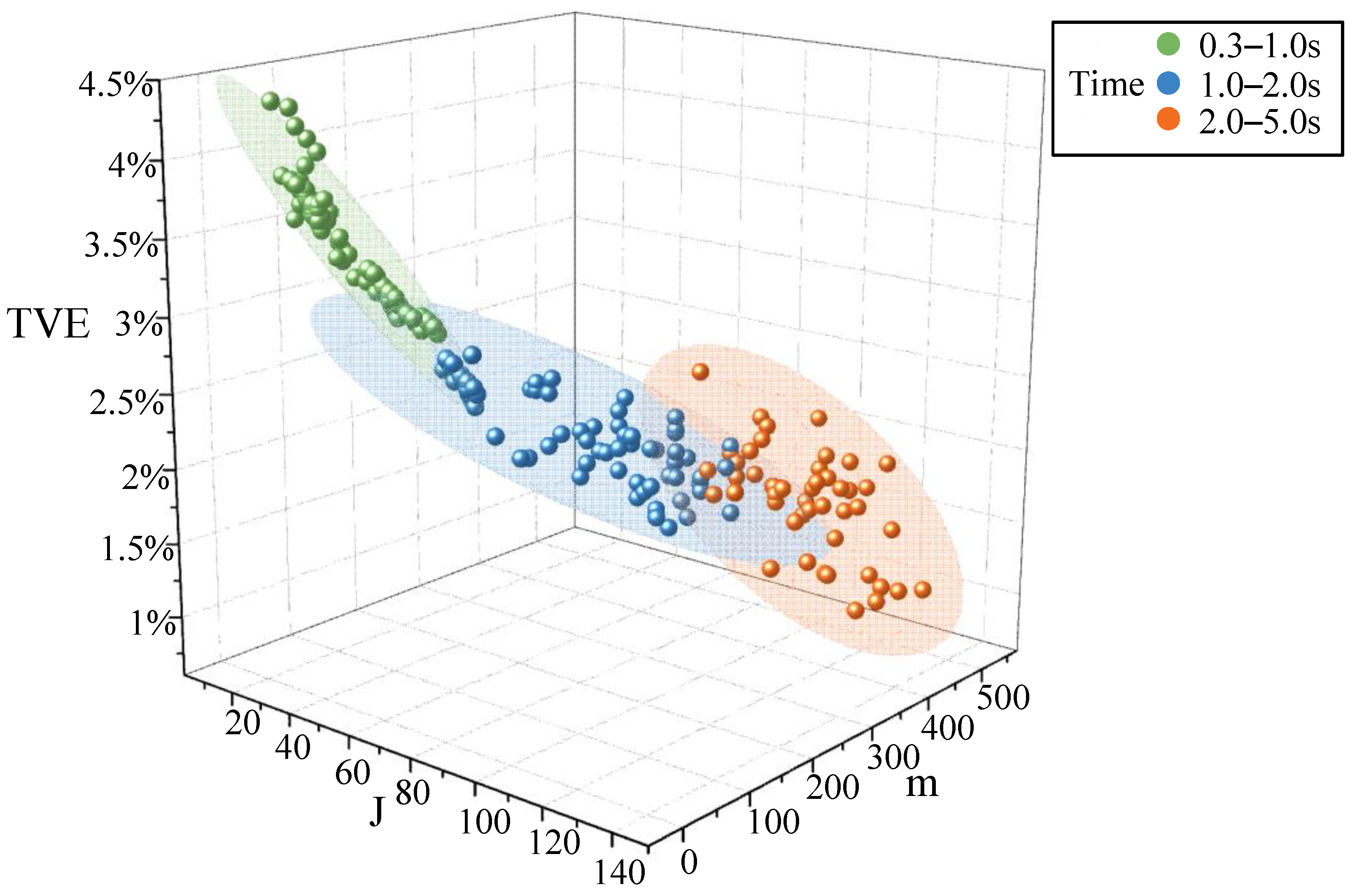
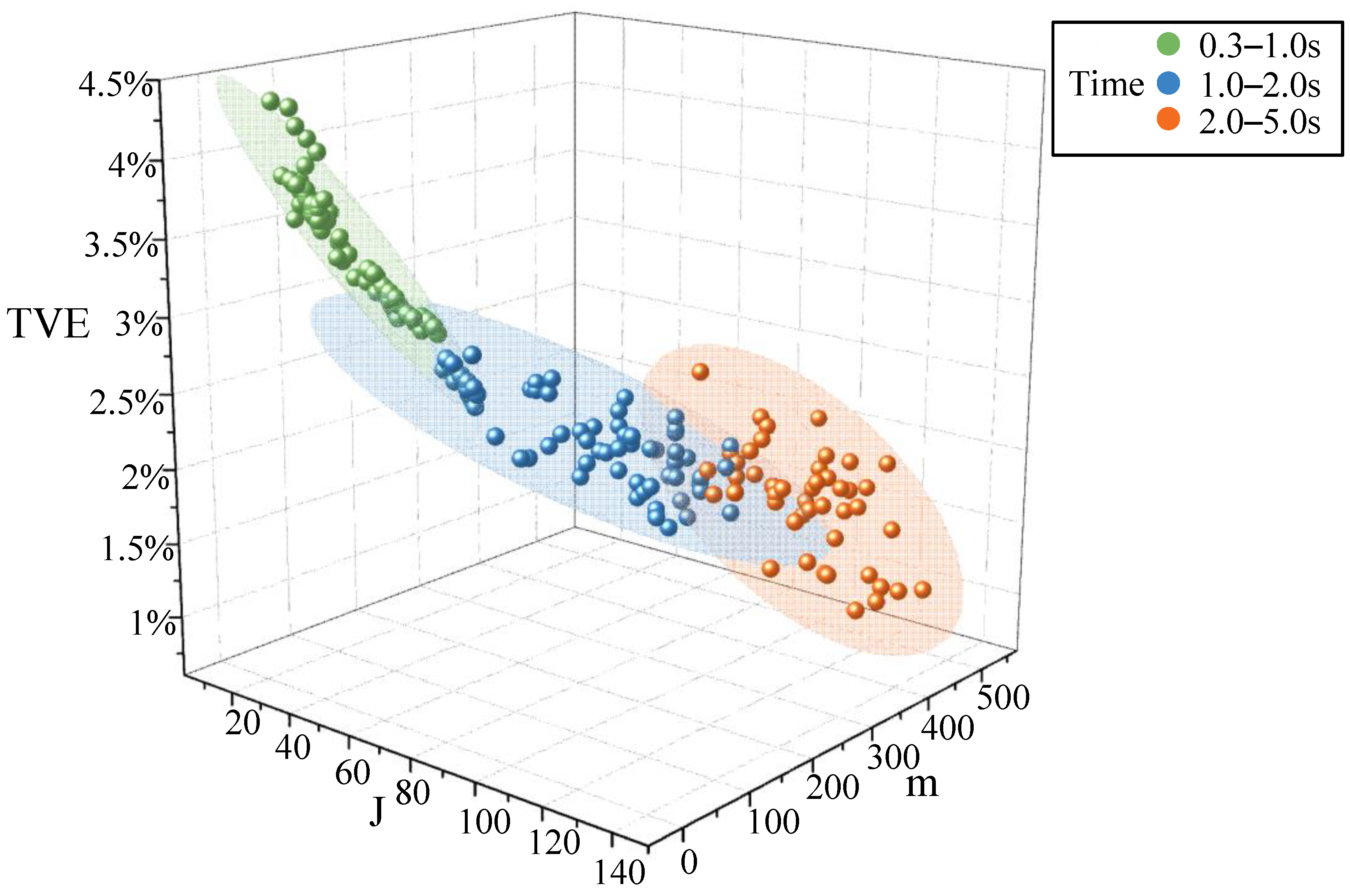
m. In the process of matrix chunking, if the number of matching blocks is too large, there must be data points in the block array with high noise impact and low matching. Conversely, the influence of chance on the construction matrix is unavoidable. In this paper, the maximum number of iterations is J. The higher the number of iterations, the higher the computational accuracy. However, the computational cost becomes significantly higher. This paper combines the analysis of reconstruction effect and algorithm running time by changing the parameters m and J. The corresponding results are shown in
Figure 1.
As can be seen from
Figure 1, the total phase error tends to decrease as the number of parameters (
m and J) increases, but the running time algorithm increases as well. When the number of data points
m = 240 and the number of iterations J is less than 100, changing the number of iterations has a minor impact on the computational cost (small change in running time). In this case, the reconstruction effect tends to be stable. When the number of iterations increases, the computational complexity increases significantly (large change in running time) and the TVE shows an unstable decreasing trend. Therefore, an appropriate reduction of m can effectively improve the reconstruction effect. Considering both reconstruction performance and running time, the parameters
m = 240 and the number of iterations J = 100 are used in the algorithm.
FFT, Prony, TWLS, and SIFE are chosen as the comparison algorithms, and the results of the total phase error estimation, frequency and frequency change rate error estimation are shown in
Table 1.
As can be seen in
Table 1, the maximum values of TVE, FE and RFE indices of the BMP algorithm are 2.79%, 0.096 Hz, and 2.437 Hz/s, respectively. When harmonic components are included, the IEEE standard limits for TVE and FE are determined as 3% and 0.1 Hz, respectively, and the limit for RFE is reported as 2.7 Hz/s [
28]. Compared with other comparative algorithms, the estimation metrics of this algorithm fully satisfies the requirements of the IEEE standard. The results show that the algorithm still provides a good detection considering the condition of broadband harmonics containing DDC components with the highest accuracy of phase estimation. The BMP algorithm uses the sparse distribution of the harmonic frequency domain distribution to identify the most relevant components of the signal. This improves the accuracy of the measurement results significantly.
The estimation error of the SIFE method near the lower harmonics does not meet the IEEE measurement standard. This is because the SIFE method is based on a low-pass filter for baseband signal filtering. Therefore, it is difficult to obtain zero-error results. However, the algorithm performs better than FFT and TWLS because of its wide passband and wide stopband, which can efficiently estimate the harmonic simultaneous phase. The FFT measurement results are most affected by spectral leakage which will reduce the accuracy of harmonic parameter identification significantly. The maximum total phase error exceeds 8% and the accuracy of its FE and RFE measurements is also unsatisfactory. Under dynamic conditions, the Fourier transform model is not able to track the phase changes in the observation window, resulting in incorrect phase evaluation. The TWLS method uses a second-order Taylor order to fit the signal components. However, the Taylor signal model has large errors and limited accuracy. Increasing the Taylor model order can reduce the model error. The drawback of this approach is that the higher the order, the worse the passband performance of the filter. The Prony algorithm uses a parametric model to calculate the signal parameters. However, its estimation order limits the number of estimated frequency components and the frequency estimation error gradually increases.
4.2. Frequency Ramp Test
The power imbalance between the load and the generator causes a decrease in the frequency of the wideband signal as the load increases while it increases as the input power increases. To analyze the performance of the BMP algorithm considering frequency ramping, the provided signals can be expressed as:
where
is the fundamental frequency and takes the value of 50 Hz.
is the fundamental frequency slope and takes the value of 1 Hz/s in this paper.
and
are the fundamental phase and harmonic phase, respectively, and the phase is set as a random number uniformly distributed in the
range.
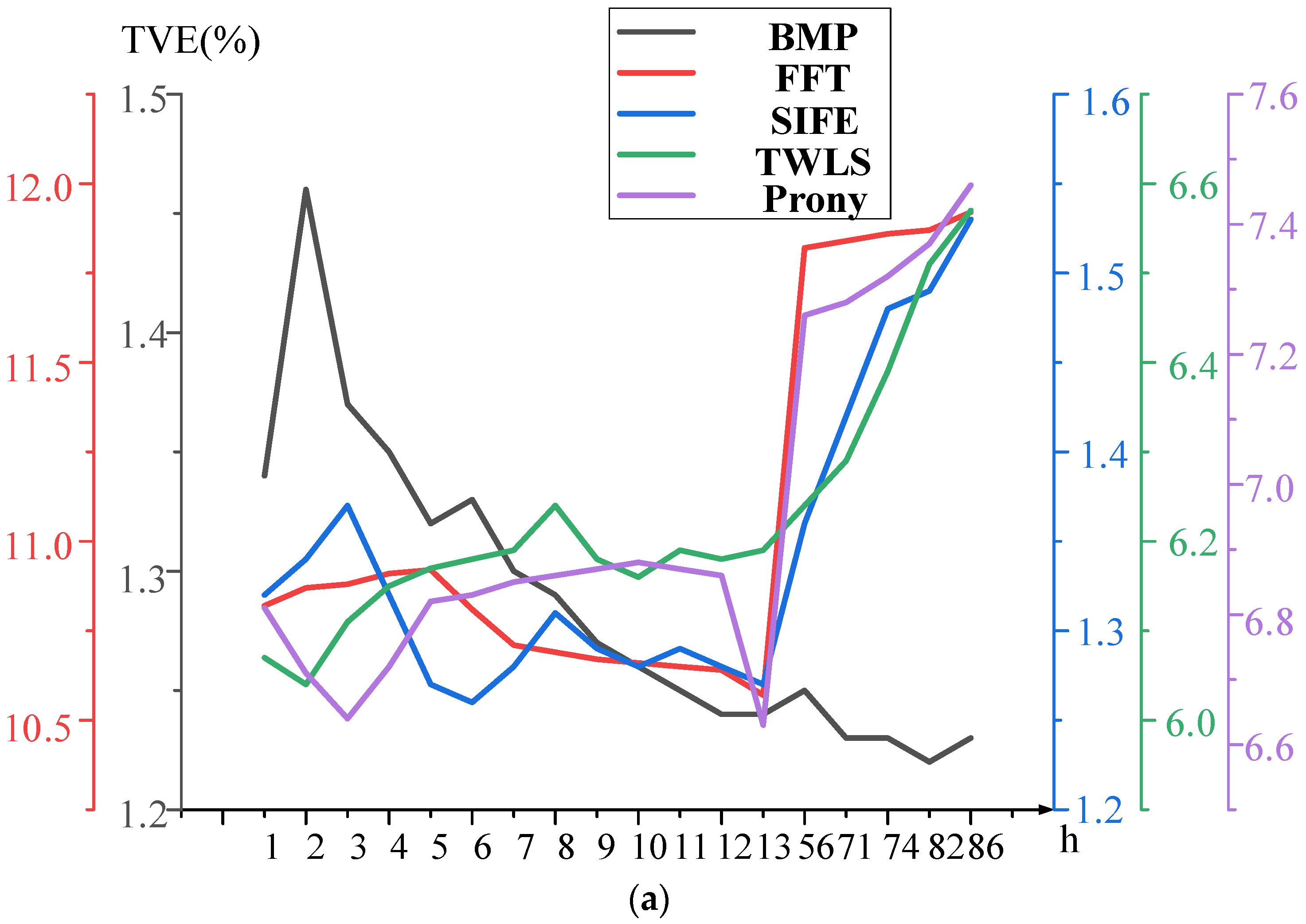
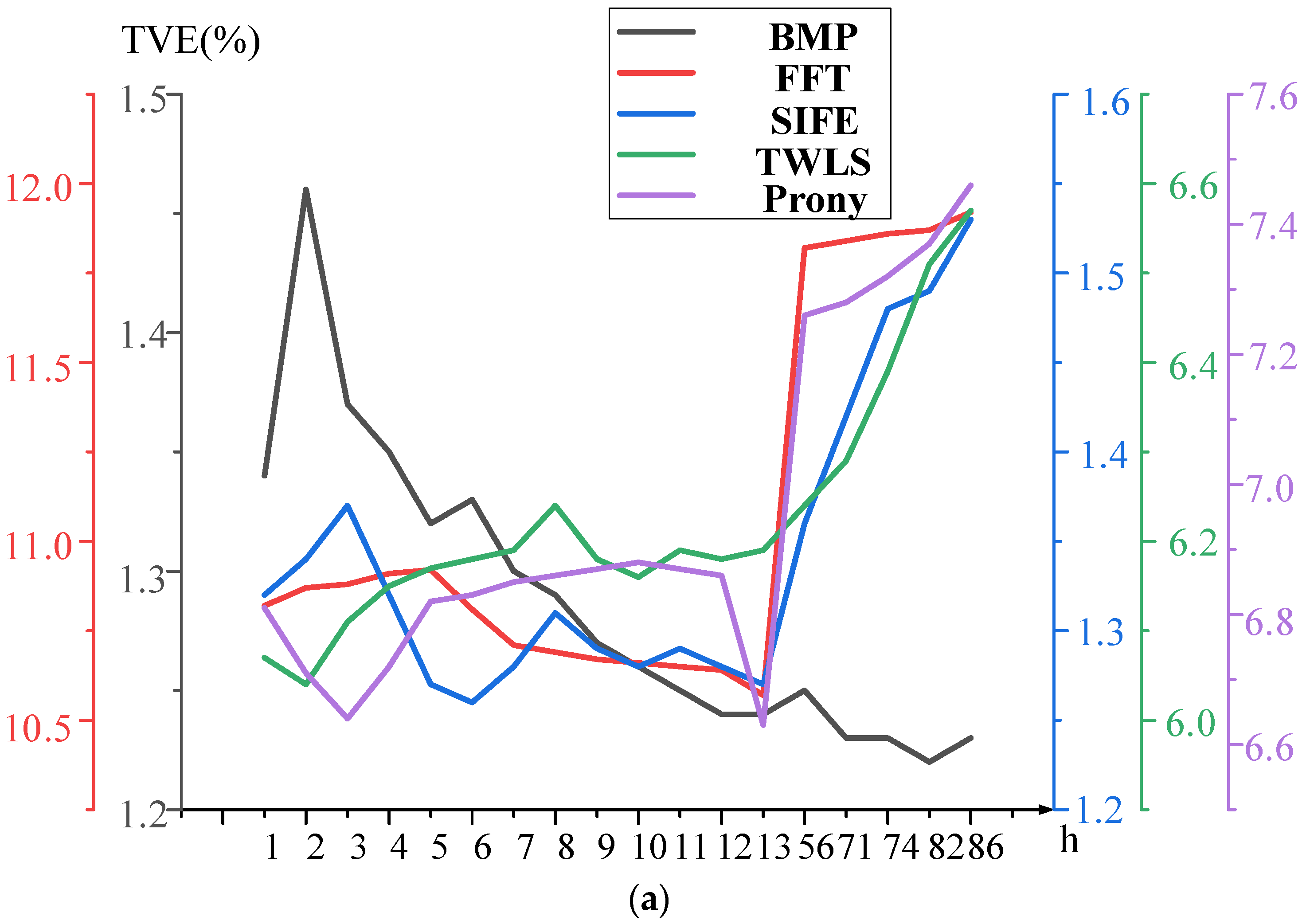
The results of harmonic phase estimation, frequency estimation, and rate of change of frequency estimation for this paper and the comparison algorithm are shown in
Figure 1. It is assumed that the sampling frequency is 10 kHz and the sampling window length is set to 5 work frequency cycles. The FFT, Prony, TWLS, and SIFE are used as comparison algorithms to analyze the signal of Equation (41). The estimation results generated by each method considering the frequency ramp condition are shown in
Figure 2.
In
Figure 2, it can be seen that the maximum error of TVE algorithm is 1.46%, the maximum frequency error is 0.095 Hz, and the maximum error of frequency conversion rate is 2.97 Hz/s. The obtained error values meet the requirements of IEEE standard [
28]. The results show that the proposed TEV algorithm can maintain high accuracy even when the fundamental frequency varies widely and linearly. Its estimation accuracy is better than the other four algorithms. The BMP algorithm uses Taylor’s order to approximate the dynamic signal model which not only can estimate the frequency and phase angle accurately, but also is least affected by the linear frequency variation. Therefore, it can be stated that the BMP algorithm has the capability to achieve the highest accuracy of phase estimation. Among the remaining algorithms, the FFT method is not able to track frequency changes in real time under dynamic conditions, and therefore has a large frequency variation rate. It is observed that the error calculation results of both Prony and TWLS algorithms are smaller than those of FFT. The reason is that the TWLS is a dynamic model-based estimation algorithm and Prony algorithm can accurately extract the low-frequency oscillation eigenvalues of the dominant mode. Furthermore, the error characteristics of parameters such as phase angle and frequency of the algorithm are less affected by the frequency change. However, the measurement results are not able to meet the requirements of IEEE standard to an acceptable level. If enough information about the time-varying characteristics of the signal is unknown, obtaining accurate mode parameters is challenging by using Prony algorithm. Similarly, it is found that TWLS algorithm is also unable to estimate the higher-order harmonic phase quantities accurately due to the influence of the fundamental components.
4.3. Step-Transformation Test
In order to simulate fault conditions with sudden changes in the amplitude and phase of voltage/current signals, it is necessary to simulate the proposed algorithm considering these conditions in order to evaluate the response time and delay. At the beginning of the test, the amplitude of each component is set to 115% of the initial amplitude while the phase changes to
. The broadband dynamic signals can be expressed as:
The tests in this section assume a sampling rate of 5 kHz and a sample period length of 5 cycles. In the standard, the speed of response time is used to evaluate the performance of each algorithm under step-change conditions. It is defined as the time interval between the first and the last instant greater than a given threshold. According to the IEEE standard for the test conditions observed in this section, the thresholds for the maximum TVE, FE, and RFE values are 1.5%, 0.13 Hz, and 0.78 Hz/s, respectively. The obtained simulation results are presented in
Figure 3.
As can be seen in
Figure 3, the BMP algorithm takes less time to reach the IEEE standard based TVE, FE, and RFE values under the amplitude and phase step-transformation conditions as compared to other algorithms. It can be concluded that the BMP algorithm has the highest estimation accuracy and the response time fully satisfies the standard requirements for P-class PMU under the step-transform condition. For the estimation of the entire Fourier transform of the stepwise smooth function, the FFT algorithm requires a complex multiplication operation. The performance of TWLS algorithm can be improved by recalculating its coefficients in each reporting frame. However, this approach significantly increases the computational burden and requires the calculation of pseudo-inverse. In order to implement the SIFE algorithm to meet the accuracy requirements, a complex matrix with 70 rows and 1400 columns needs to be stored in memory. Considering the processing practicalities,
real multiplications and
real additions need to be carried out in real time, which is very limited in terms of memory and processing power. In order to get more accurate results for the Prony algorithm, the model order of the algorithm needs to be increased, thus increasing the computational effort. In this paper, the BMP algorithm uses a machine learning algorithm to collect the key information of the signal and construct the sparse matrix. This solution greatly reduces the complexity of the operation and results in faster and accurate detection of broadband dynamic signals.
4.4. Anti-Jamming Test
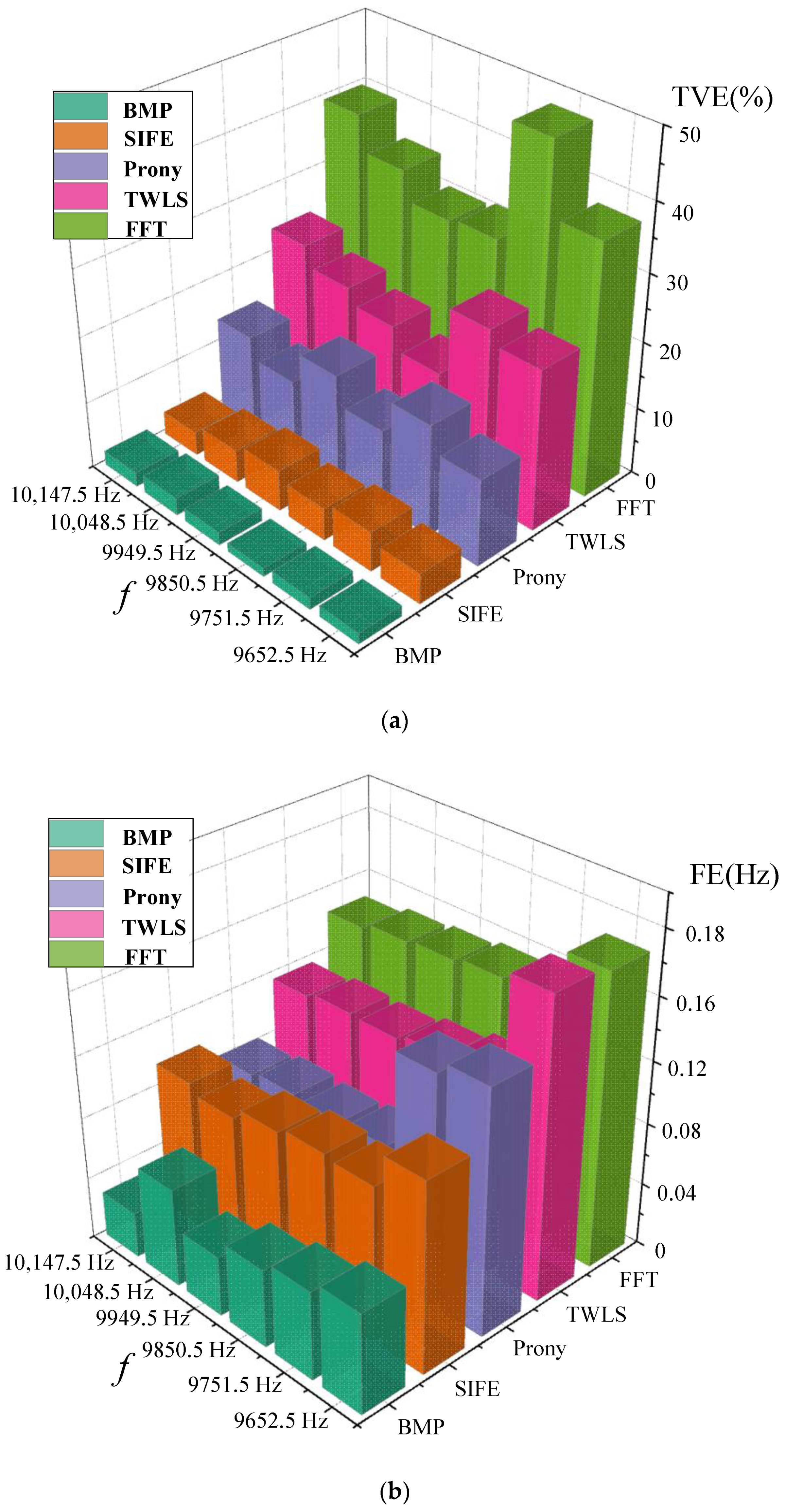
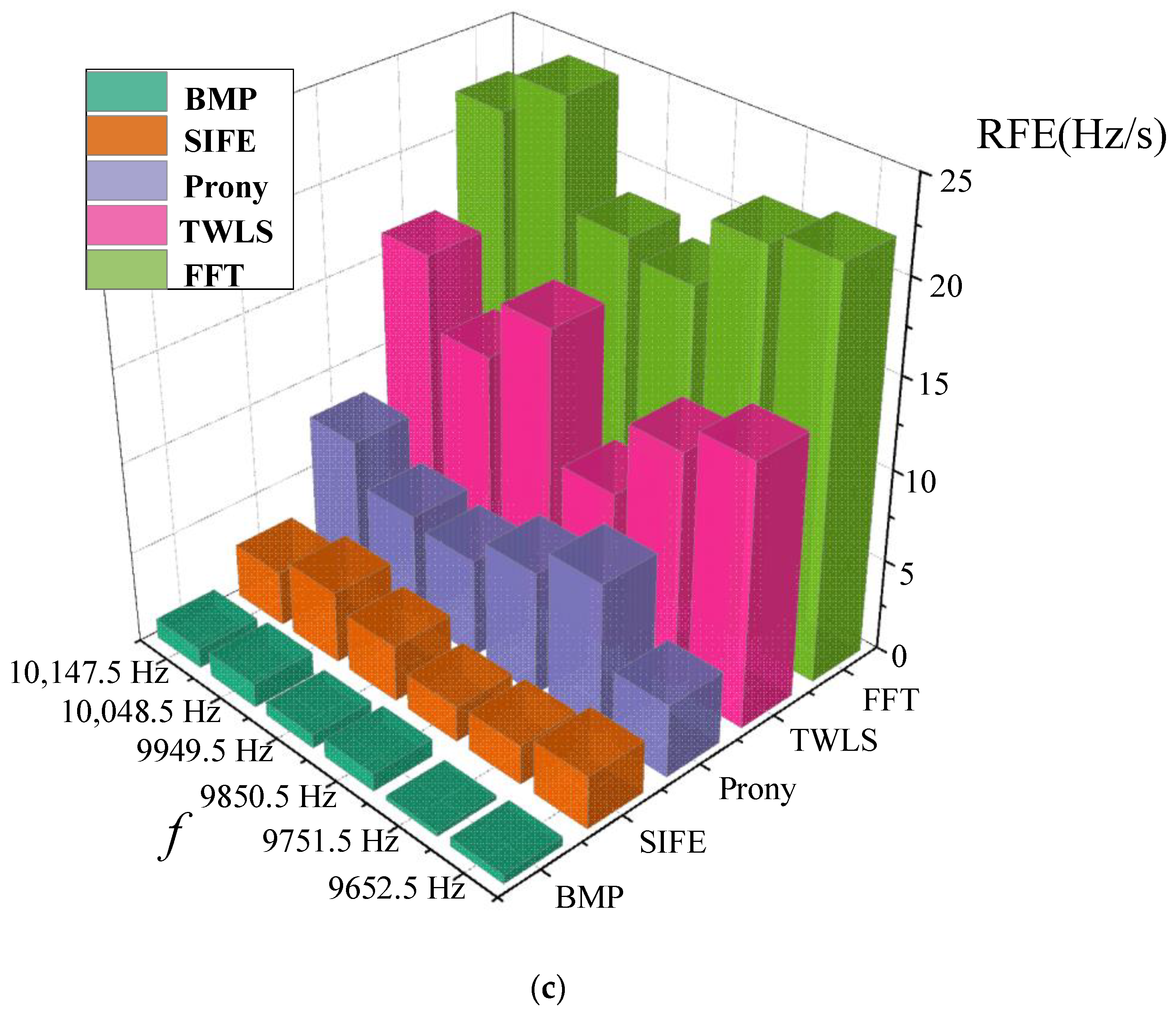
Typically, the signals flowing in the power grid contains a certain amount of interharmonics and noise, which can seriously affect the estimation of harmonic phase. In this section, Gaussian white noise is introduced with a signal-to-noise ratio of 55 dB. The broadband dynamic signals can be expressed as:
where
is the interharmonic frequency and its values are considered in the order of 9652.5 Hz, 9751.5 Hz, 9850.5 Hz, 9949.5 Hz, 10,048.5 Hz, and 10,147.5 Hz. Where
and
are the phases of the fundamental and harmonics and their values are random numbers in the range of
. The sampling frequency is assumed as 10 kHz and the sampling window length is set to 5 I.F. periods. The obtained simulation results are shown in
Figure 4.
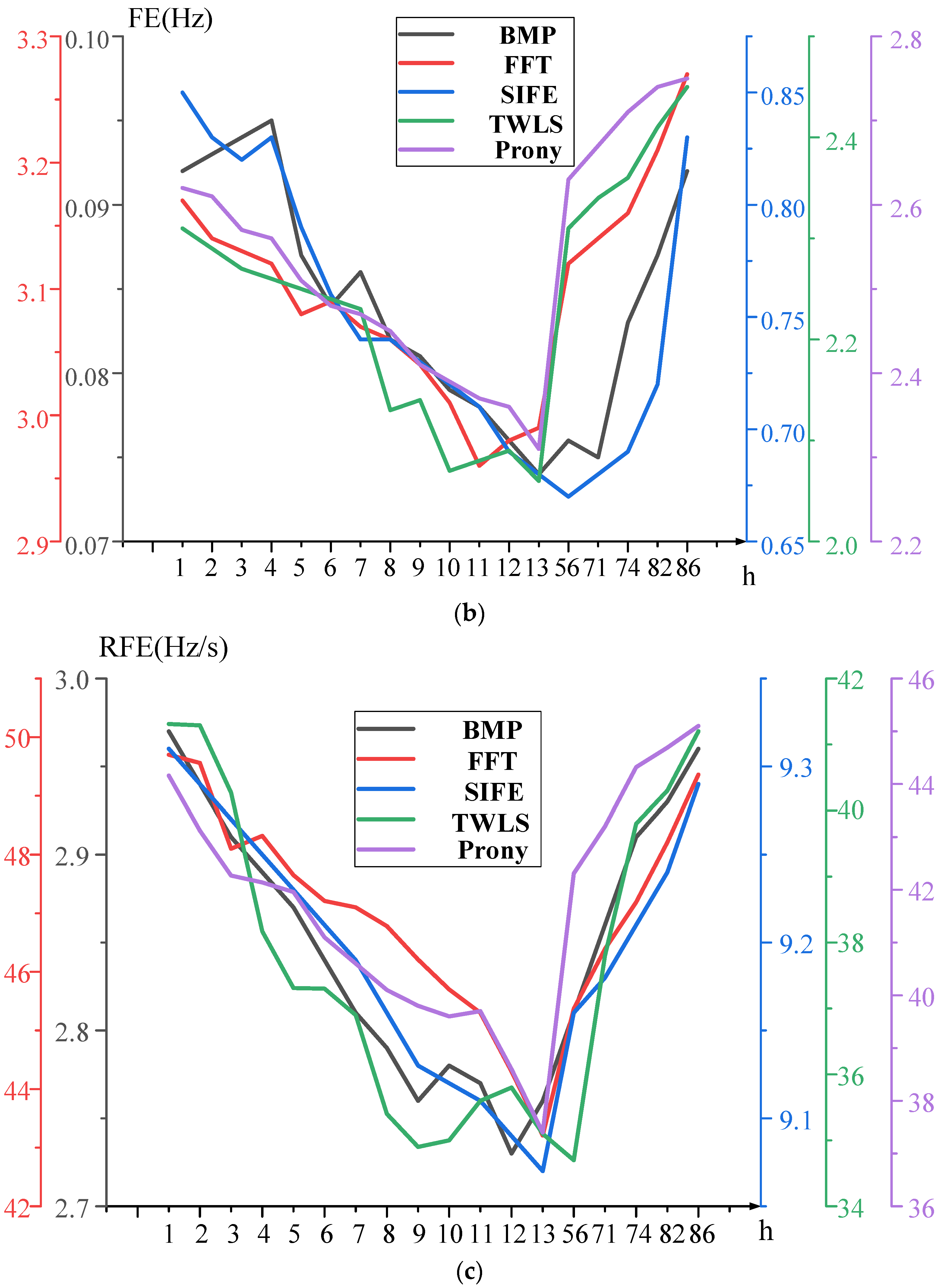
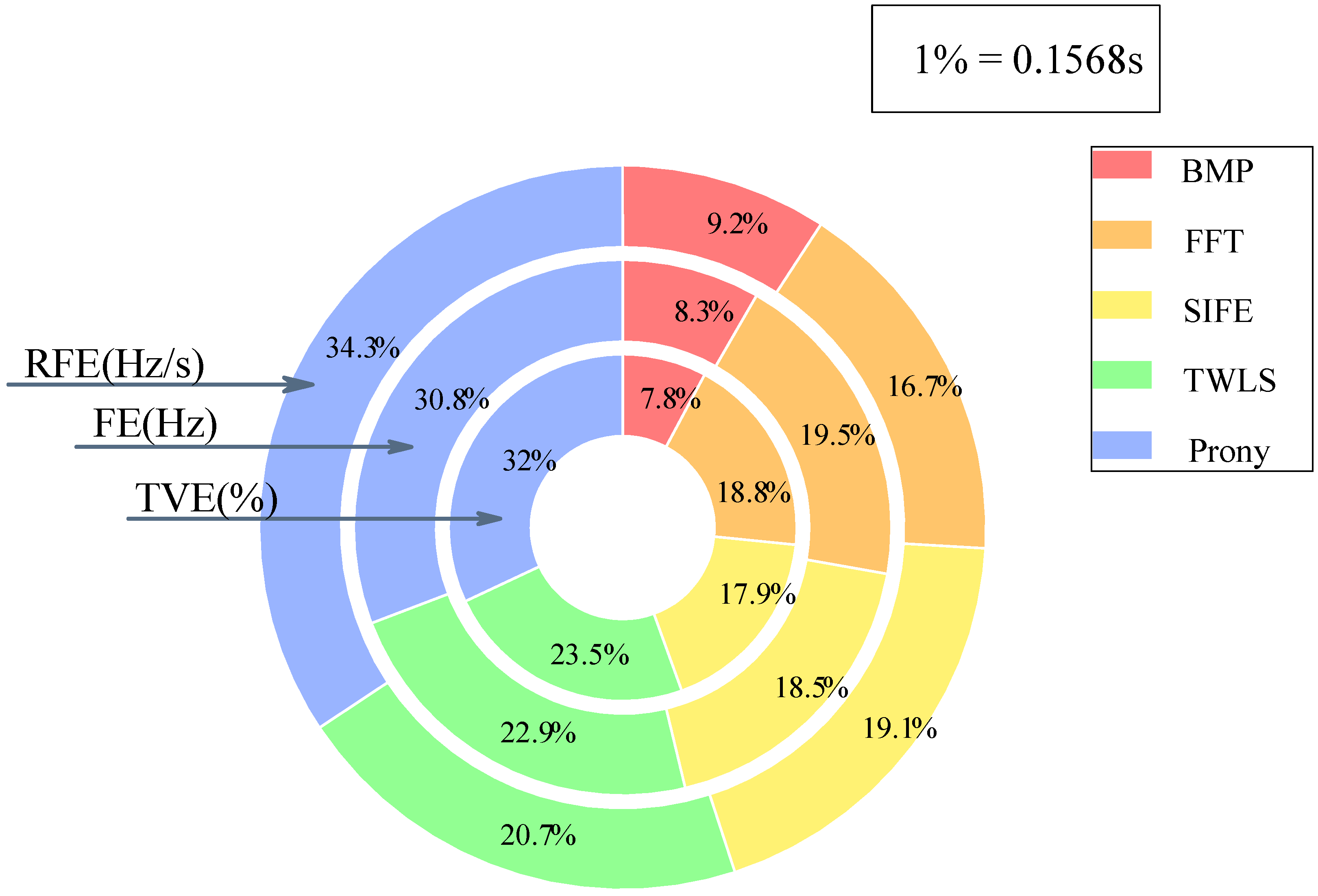
It can be observed in
Figure 4 that the TVEmax of the proposed algorithm is 2.43%, FEmax is 0.071 Hz, and RFEmax is 0.184 Hz/s. The calculation based results of the algorithm are found better than the rest of the comparison algorithms. In the presence of interharmonic interference, the IEEE standard limits for TVE, FE and RFE are 3.5%, 0.2 Hz, and 3 Hz/s, respectively. Similarly, the results of TVEmax, FEmax, and RFEmax parameters for SIFE algorithm are 6.64%, 0.115 Hz and 7.39 Hz/s, respectively, while those for Prony algorithm are 19.73%, 0.136 Hz, and 9.207 Hz/s, respectively. The calculation based results of each index of Prony algorithm are better than the other comparative algorithms. The indexes of BMP algorithm meet the requirements of IEEE standard. In case of noise interference in this segment, serious interference and spectral leakage occurs between adjacent harmonics of the FFT algorithm, which affects the resolution and accuracy. Similarly, in case of noise interference in this segment, the TWLS and SIFE algorithm increase the amplitude of the transition band for their harmonic filters, causing interference between adjacent harmonics which leads to large estimation errors. In addition, the TWLS algorithm is severely affected by interharmonic interference, making it challenging to estimate each high-frequency component accurately. For higher-order components, the model parameters of the Prony algorithm are constantly modified as the harmonic order increases. Therefore, Prony algorithm has good results for estimation of interharmonic phase and frequency. This can suppress the effect of spectral leakage of interharmonic components to some extent. However, this method requires pre-estimation of the order of the dynamic time-varying signal.
The BMP algorithm uses a modified Taylor–Fourier model to recover a specific signal with fewer data points accurately. This leads to accurate reconstruction of the harmonic phase to solve with a sparse acquisition model, which effectively improves the reconstruction performance and noise immunity of the algorithm. In addition, the algorithm reconstructs the spectrum with a resolution of 1 Hz, which facilitates the accurate detection of interharmonic components.
4.5. Measurement Validation and Analysis
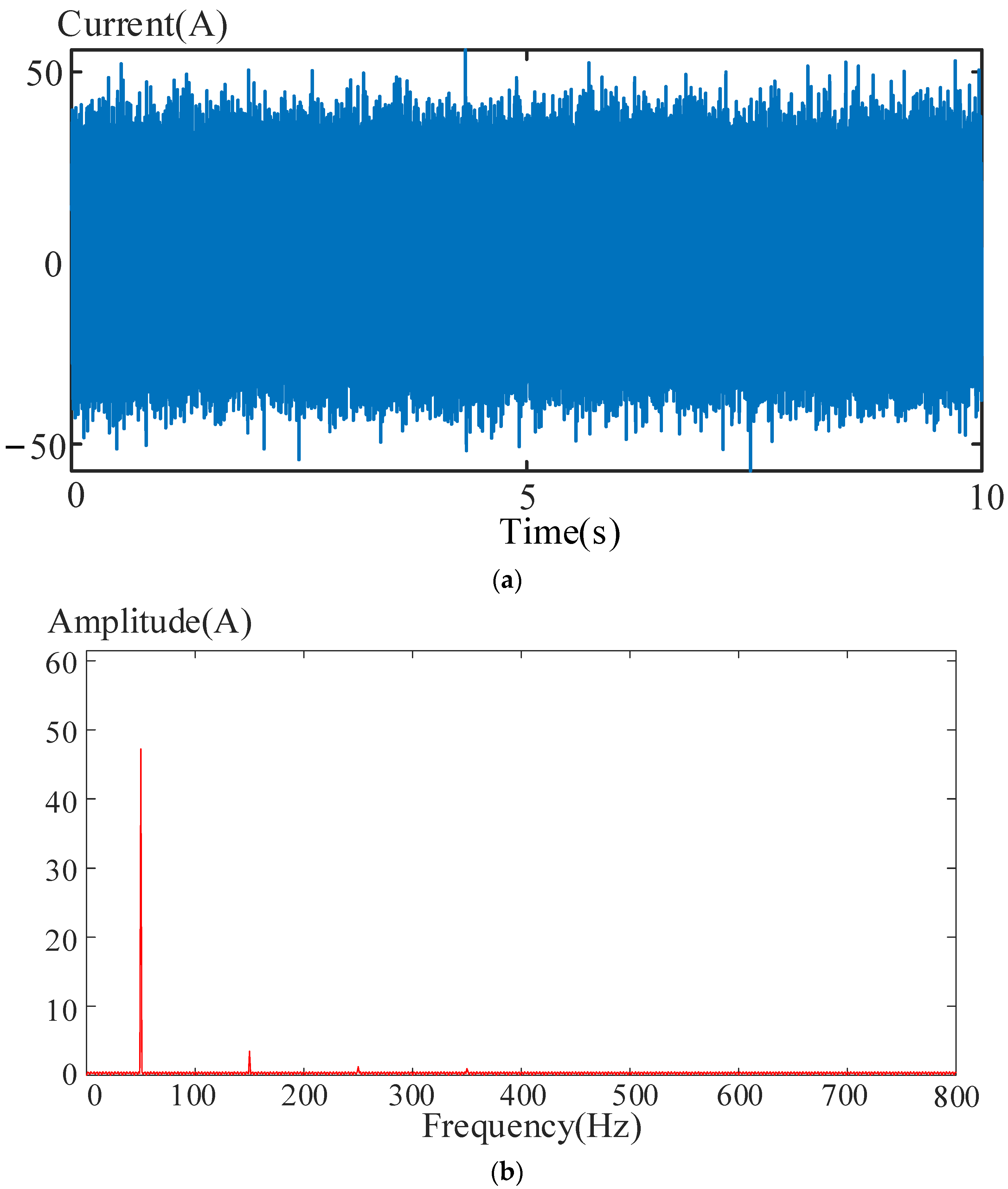
In order to demonstrate the BMP’s practical values, we use the current field data recorded at a high-speed rail converter station for testing. The measuring instrument is MHD-AE301 multi-functional power monitoring instrument. In
Figure 5, the field data and its spectrum are shown. As seen, there are significant fundamental and third-harmonic components.
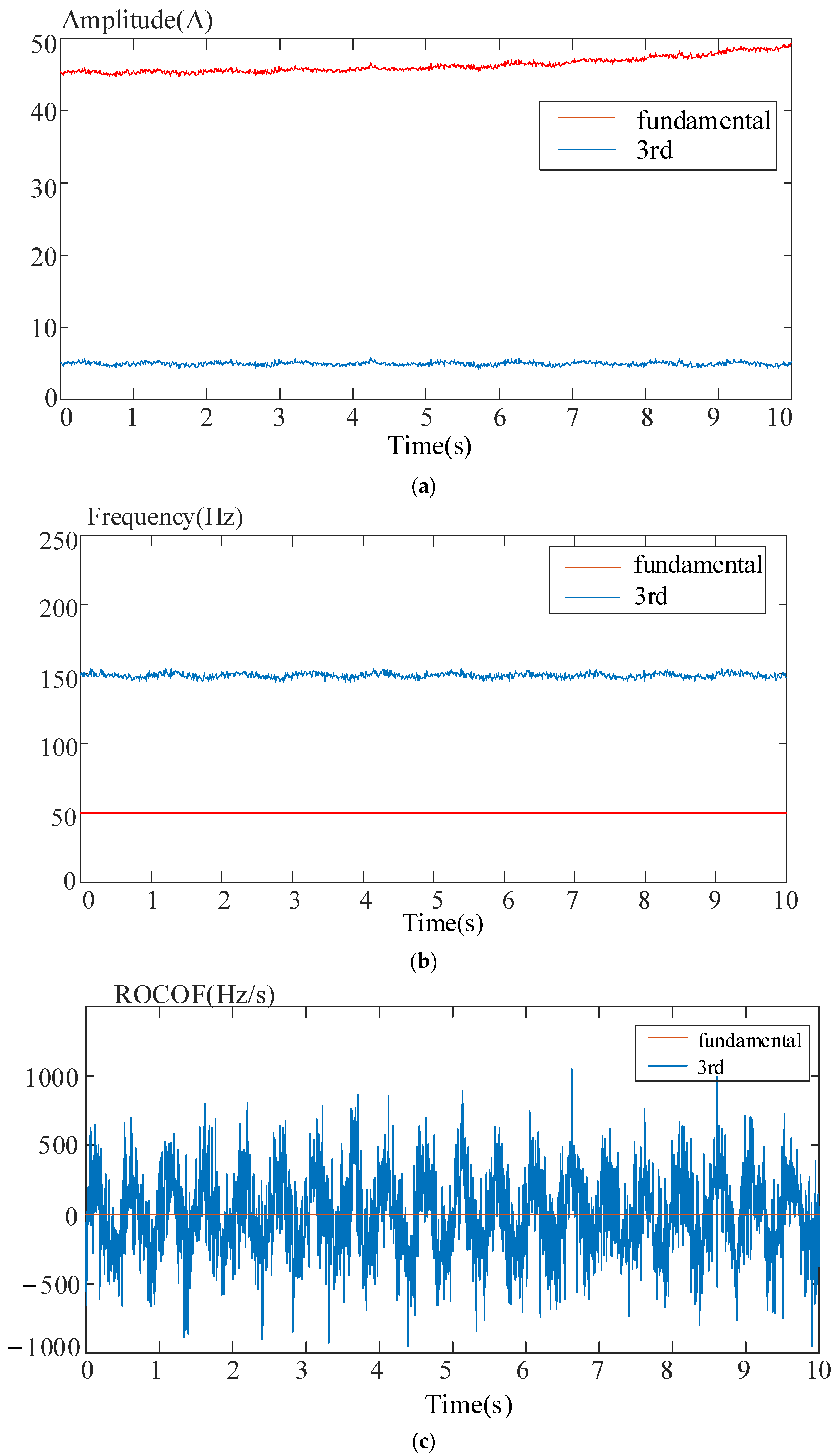
We investigate the BMP algorithm in this paper by sampling data in matlab simulation platform. The parameter estimates for the BMP method are shown in
Figure 6.
It can be observed in
Figure 6 that the amplitude, frequency, or ROCOF estimates for the BMP method are almost identical to those for the power monitor. Therefore, BMP method can be used to estimate harmonic parameters of unknown signals.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}