
Monoscopic Phase Measuring Deflectometry Simulation and Verification

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Principle of the SMPMD Model
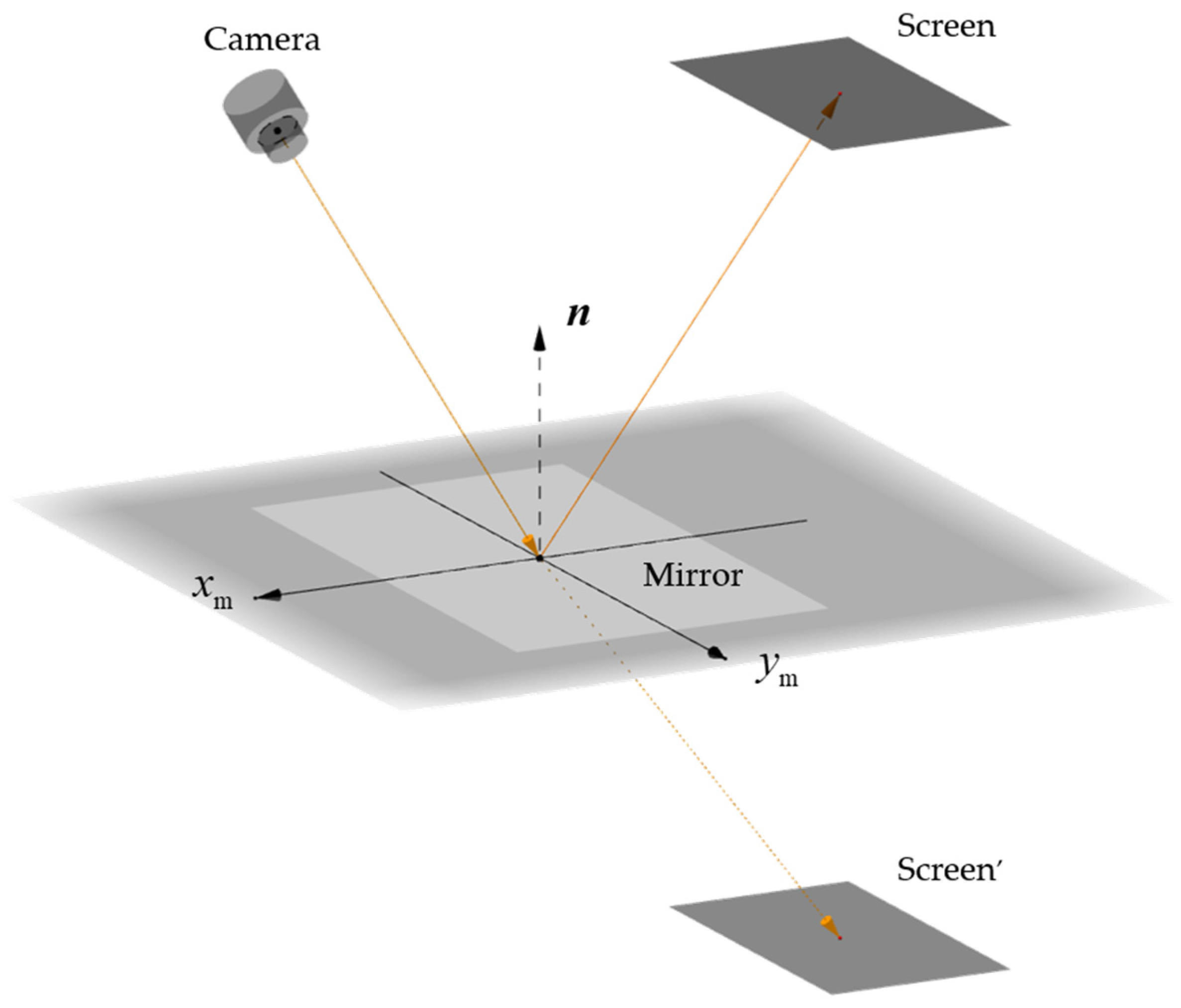
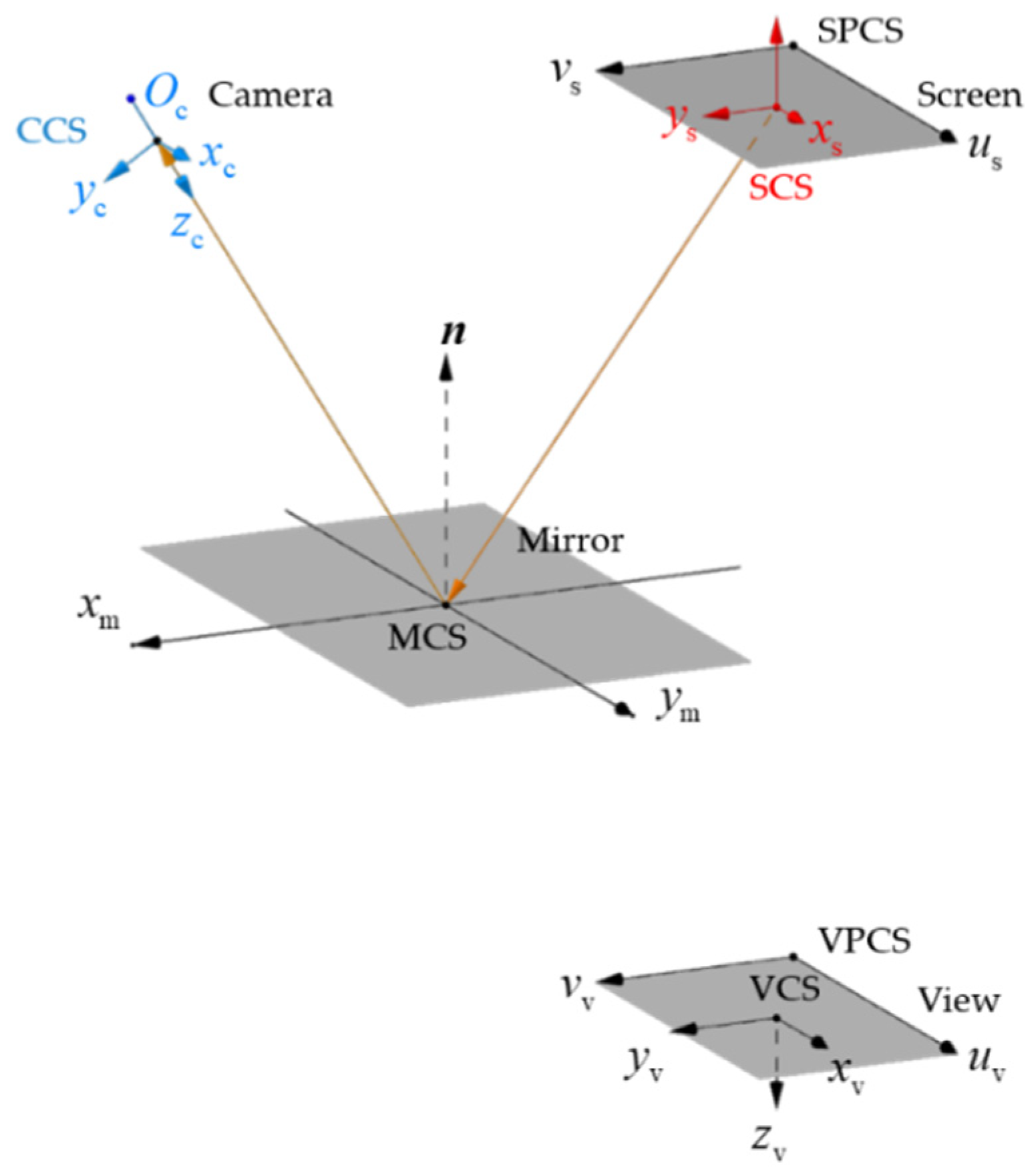
2.1. The Principle of the SPG Model
2.2. The Principle of the Simulated MPMD Model
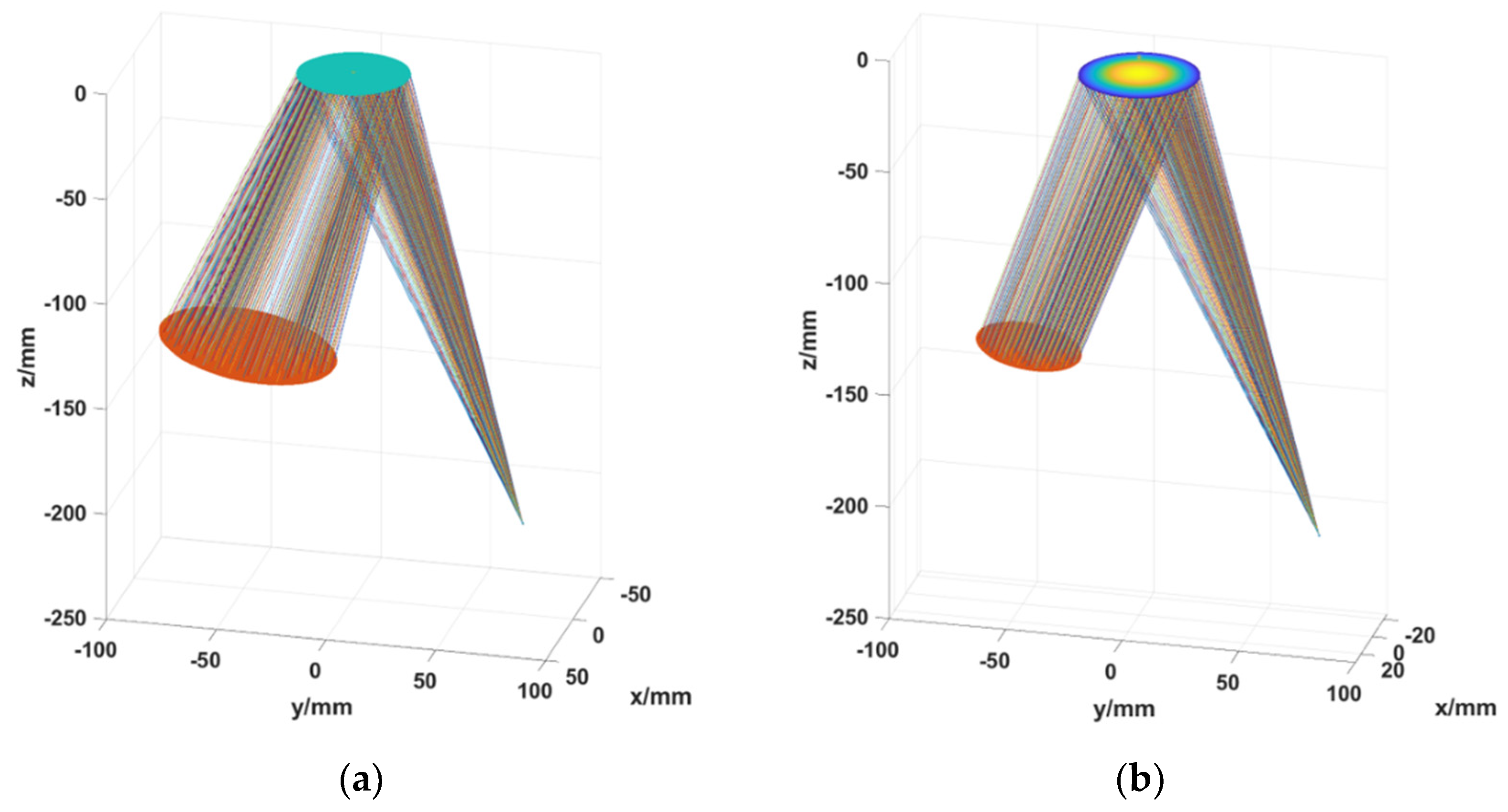
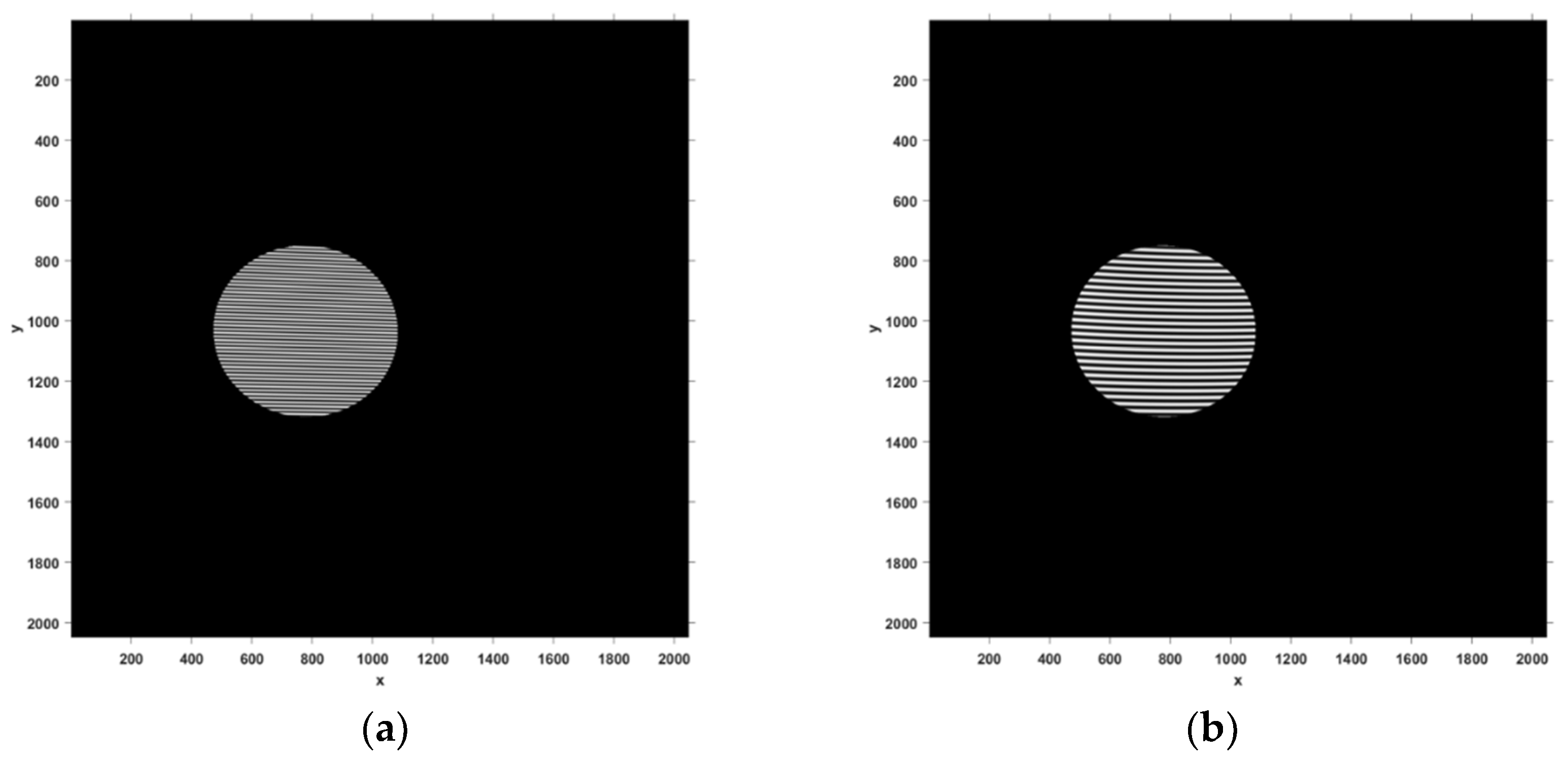
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tang, T.; Deng, C.; Yang, T.; Zhong, D.; Ren, G.; Huang, Y.; Fu, C. Error-Based Observer of a Charge Couple Device Tracking Loop for Fast Steering Mirror. Sensors 2017, 17, 479. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saif, B.; Chaney, D.; Greenfield, P.; Bluth, M.; Van Gorkom, K.; Smith, K.; Bluth, J.; Feinberg, L.; Wyant, J.C.; North-Morris, M.; et al. Measurement of picometer-scale mirror dynamics. Appl. Opt. 2017, 56, 6457–6465. [Google Scholar] [CrossRef] [PubMed]
- Coyle, L.; Chonis, T.; Smith, K.; Knight, J.S.; Acton, D.S.; Howard, J.; Feinberg, L. Optical Assessment of the James Webb Space Telescope Primary and Secondary Mirror Cryogenic Alignment with a Hartmann Test; SPIE: Bellingham, WA, USA, 2018; Volume 10706. [Google Scholar]
- Wang, W.; Sun, G.; Van Gool, L. Looking Beyond Single Images for Weakly Supervised Semantic Segmentation Learning. IEEE Trans. Pattern Anal. 2022. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Zhou, T.; Porikli, F.; Crandall, D.; Van Gool, L. A survey on deep learning technique for video segmentation. arXiv 2021, arXiv:2107.01153. [Google Scholar]
- Xu, Y.; Gao, F.; Jiang, X. A brief review of the technological advancements of phase measuring deflectometry. PhotoniX 2020, 1, 14. [Google Scholar] [CrossRef]
- Schmit, J.; Faber, C.; Olesch, E.; Krobot, R.; Häusler, G.; Creath, K.; Towers, C.E.; Burke, J. Deflectometry challenges interferometry: The competition gets tougher! In Proceedings of the Interferometry XVI: Techniques and Analysis, San Diego, CA, USA, 12 August 2012. [Google Scholar]
- Xue, S.; Chen, S.; Tie, G. Near-null interferometry using an aspheric null lens generating a broad range of variable spherical aberration for flexible test of aspheres. Opt. Express 2018, 26, 31172–31189. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.M.; Xu, Y.J.; Zhang, Z.H.; Gao, F.; Jiang, X.Q. 3D Measurement of Structured Specular Surfaces Using Stereo Direct Phase Measurement Deflectometry. Machines 2021, 9, 170. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, Y.; Huang, S.; Liu, Y.; Chang, C.; Gao, F.; Jiang, X. Three-Dimensional Shape Measurements of Specular Objects Using Phase-Measuring Deflectometry. Sensors 2017, 17, 2835. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Y.; Huang, S.; Zhang, Z.; Gao, N.; Gao, F.; Jiang, X. Full-field 3D shape measurement of discontinuous specular objects by direct phase measuring deflectometry. Sci. Rep. 2017, 7, 10293. [Google Scholar] [CrossRef] [PubMed]
- Huang, L.; Ng, C.S.; Asundi, A.K. Dynamic three-dimensional sensing for specular surface with monoscopic fringe reflectometry. Opt. Express 2011, 19, 12809–12814. [Google Scholar] [CrossRef] [PubMed]
- Knauer, M.C.; Kaminski, J.; Hausler, G. Phase Measuring Deflectometry: A new approach to measure specular free-form surfaces. Opt. Metrol. Prod. Eng. 2004, 5457, 366–376. [Google Scholar] [CrossRef]
- Tang, Y.; Su, X.; Liu, Y.; Jing, H. 3D shape measurement of the aspheric mirror by advanced phase measuring deflectometry. Opt. Express 2008, 16, 15090–15096. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Chang, C.; Liu, X.; Li, Z.; Shi, Y.; Gao, N.; Meng, Z. Phase measuring deflectometry for obtaining 3D shape of specular surface: A review of the state-of-the-art. Opt. Eng. 2021, 60, 020903. [Google Scholar] [CrossRef]
- Zhao, P.; Gao, N.; Zhang, Z.H.; Gao, F.; Jiang, X.Q. Performance analysis and evaluation of direct phase measuring deflectometry. Opt. Laser Eng. 2018, 103, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Huang, L.; Xue, J.P.; Gao, B.; McPherson, C.; Beverage, J.; Idir, M. Modal phase measuring deflectometry. Opt. Express 2016, 24, 24649–24664. [Google Scholar] [CrossRef] [PubMed]
- Han, H.; Wu, S.; Song, Z.; Zhao, J. An Accurate Phase Measuring Deflectometry Method for 3D Reconstruction of Mirror-Like Specular Surface. In Proceedings of the 2019 2nd International Conference on Intelligent Autonomous Systems (ICoIAS), Singapore, 28 February–2 March 2019; pp. 20–24. [Google Scholar]
- Xu, Y.J.; Gao, F.; Jiang, X.Q. Enhancement of measurement accuracy of optical stereo deflectometry based on imaging model analysis. Opt. Laser Eng. 2018, 111, 1–7. [Google Scholar] [CrossRef]
- Zhang, X.; Li, D.; Wang, R.; Tang, H.; Luo, P.; Xu, K. Speckle pattern shifting deflectometry based on digital image correlation. Opt. Express 2019, 27, 25395–25409. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.Y. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Herraez, M.A.; Burton, D.R.; Lalor, M.J.; Gdeisat, M.A. Fast two-dimensional phase-unwrapping algorithm based on sorting by reliability following a noncontinuous path. Appl. Opt. 2002, 41, 7437–7444. [Google Scholar] [CrossRef] [PubMed]
- Huang, L.; Xue, J.; Gao, B.; Zuo, C.; Idir, M. Zonal wavefront reconstruction in quadrilateral geometry for phase measuring deflectometry. Appl. Opt. 2017, 56, 5139–5144. [Google Scholar] [CrossRef] [PubMed]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Yin, D.; Zhang, Q.; Gong, H. Monoscopic Phase Measuring Deflectometry Simulation and Verification. Electronics 2022, 11, 1634. https://doi.org/10.3390/electronics11101634
Li Z, Yin D, Zhang Q, Gong H. Monoscopic Phase Measuring Deflectometry Simulation and Verification. Electronics. 2022; 11(10):1634. https://doi.org/10.3390/electronics11101634
Chicago/Turabian StyleLi, Zhiming, Dayi Yin, Quan Zhang, and Huixing Gong. 2022. "Monoscopic Phase Measuring Deflectometry Simulation and Verification" Electronics 11, no. 10: 1634. https://doi.org/10.3390/electronics11101634
APA StyleLi, Z., Yin, D., Zhang, Q., & Gong, H. (2022). Monoscopic Phase Measuring Deflectometry Simulation and Verification. Electronics, 11(10), 1634. https://doi.org/10.3390/electronics11101634