
Improvement of Accuracy and Precision of the LiDAR System Working in High Background Light Conditions



Abstract

1. Introduction
2. Design of the System Hardware
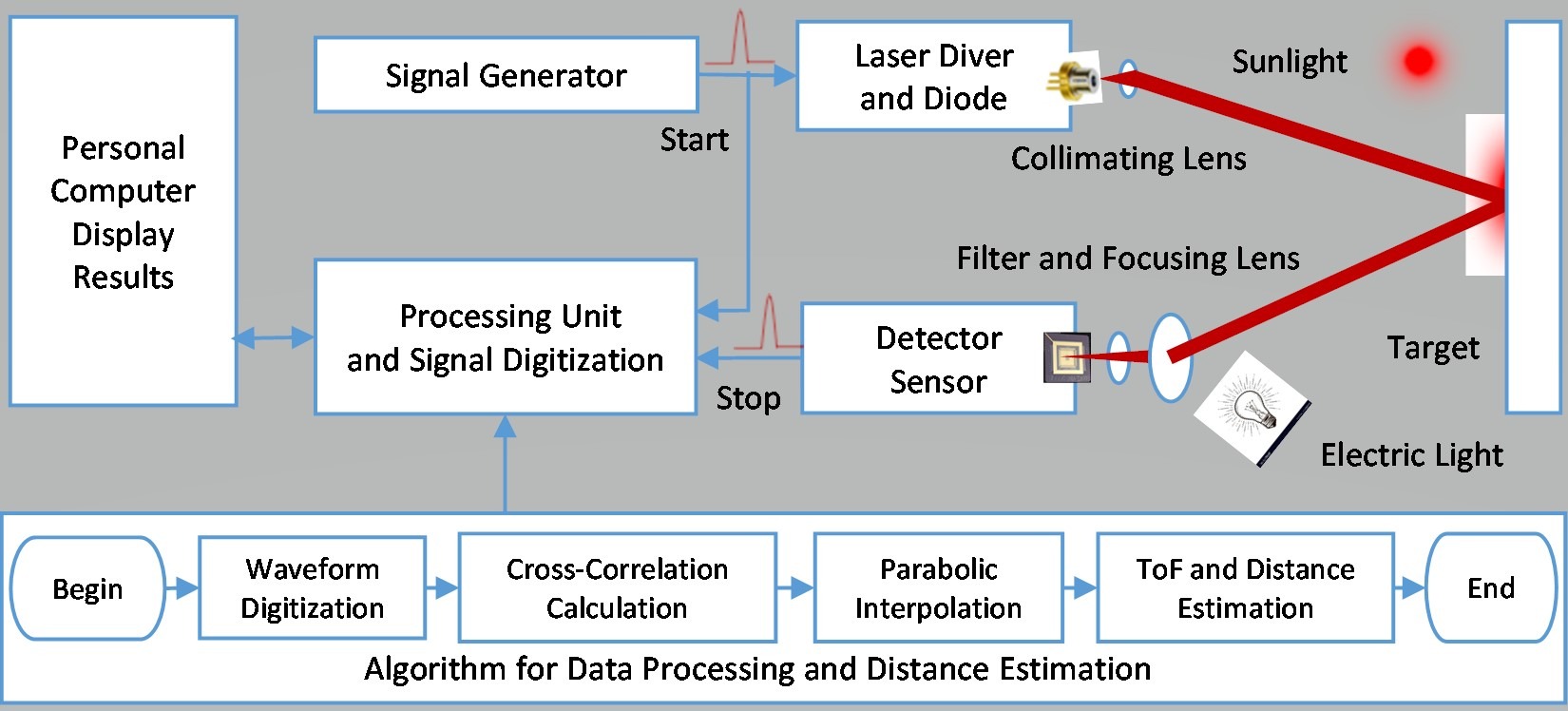
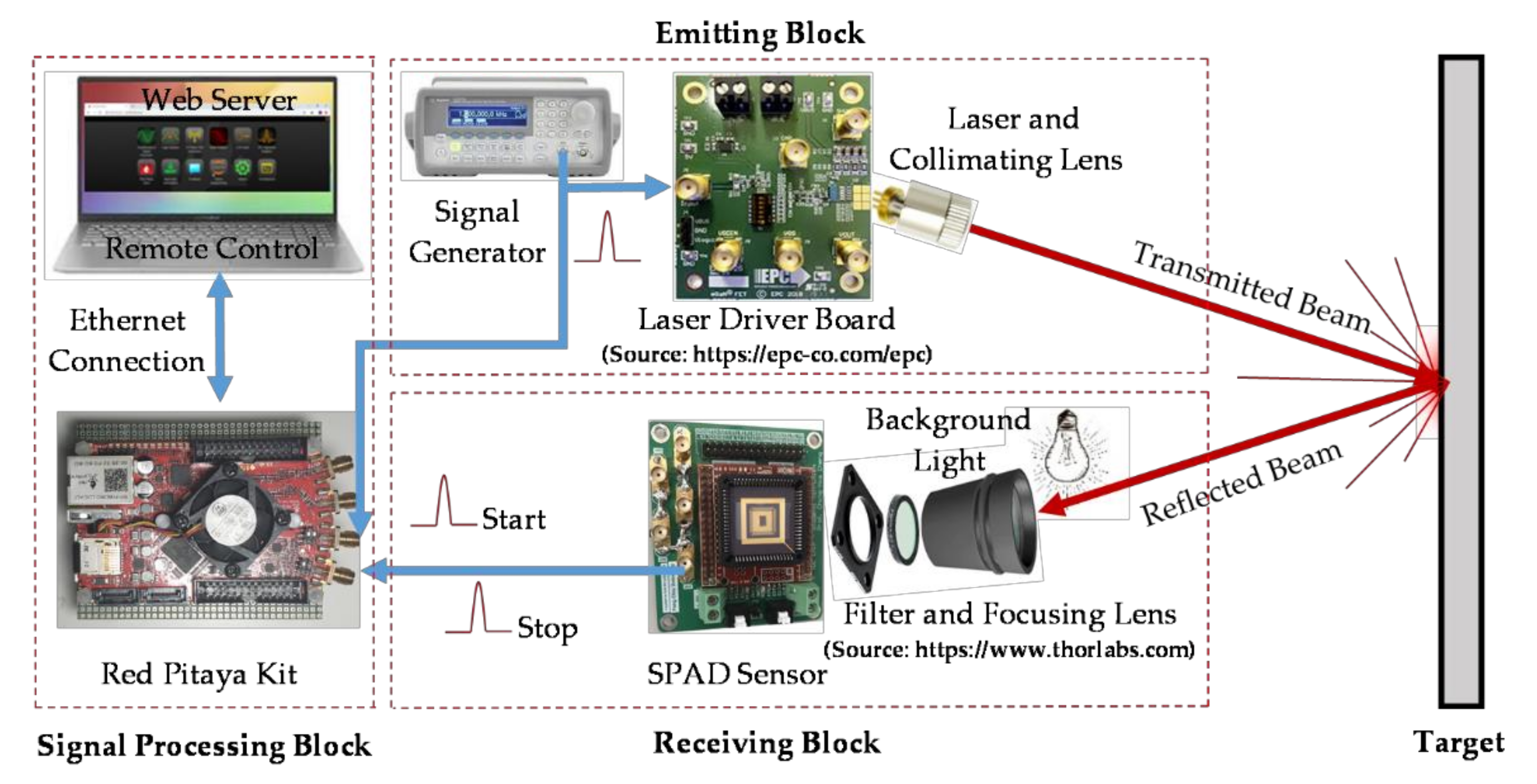
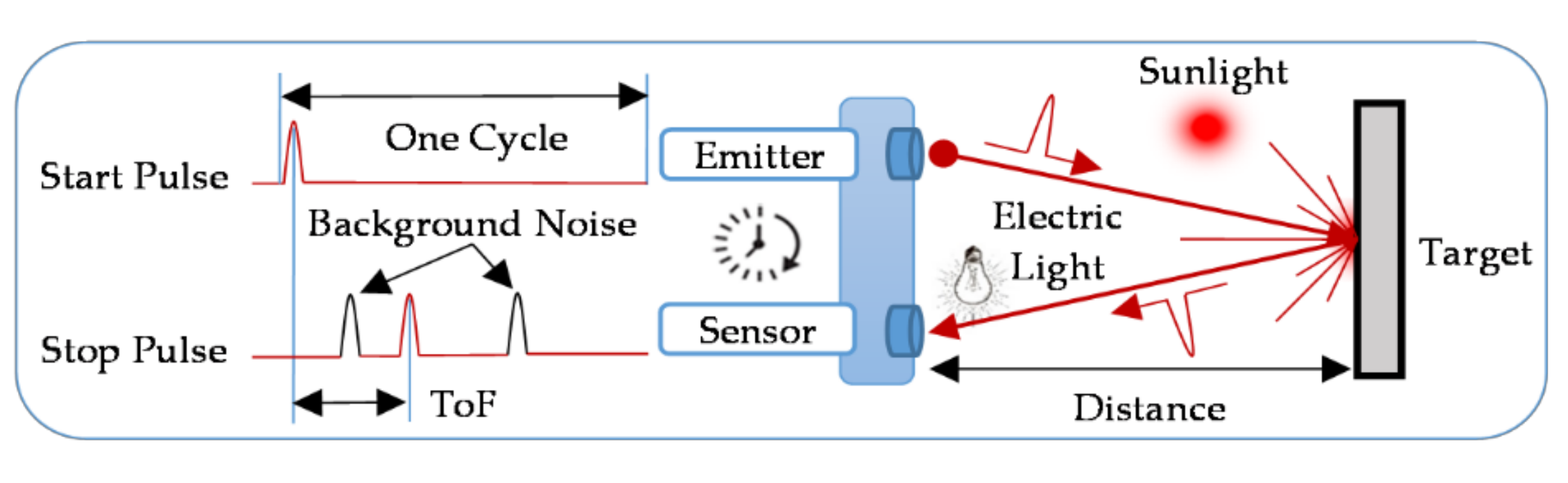
2.1. System Overview
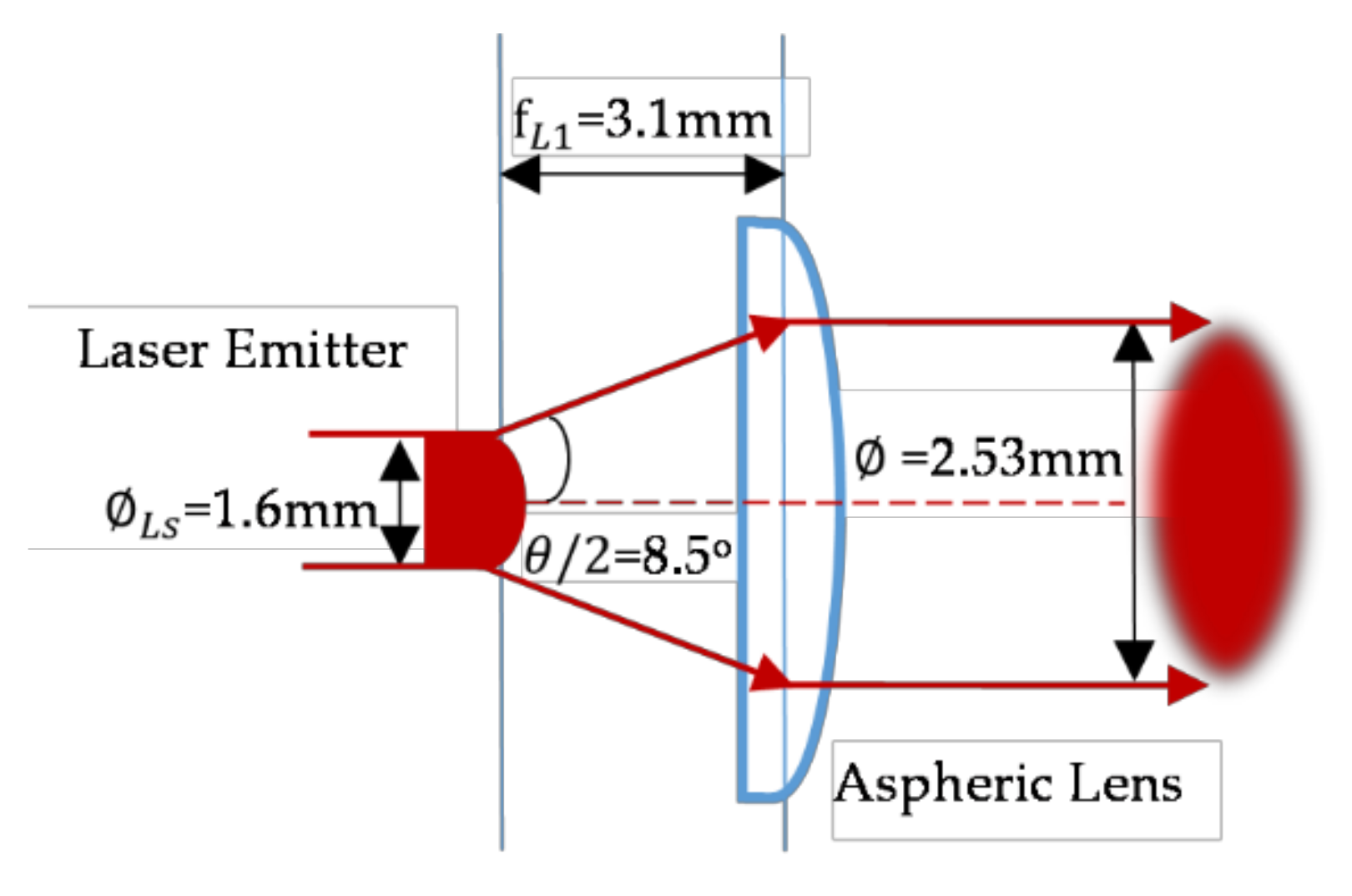
2.2. Emitting Block
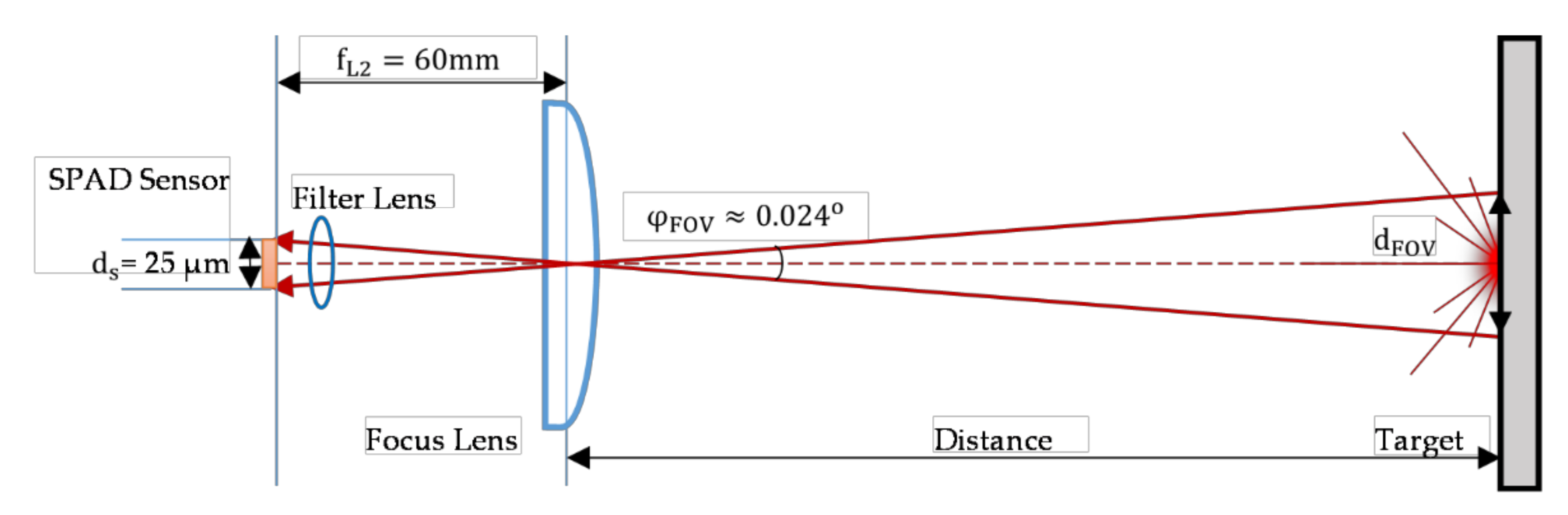
2.3. Receiving Block
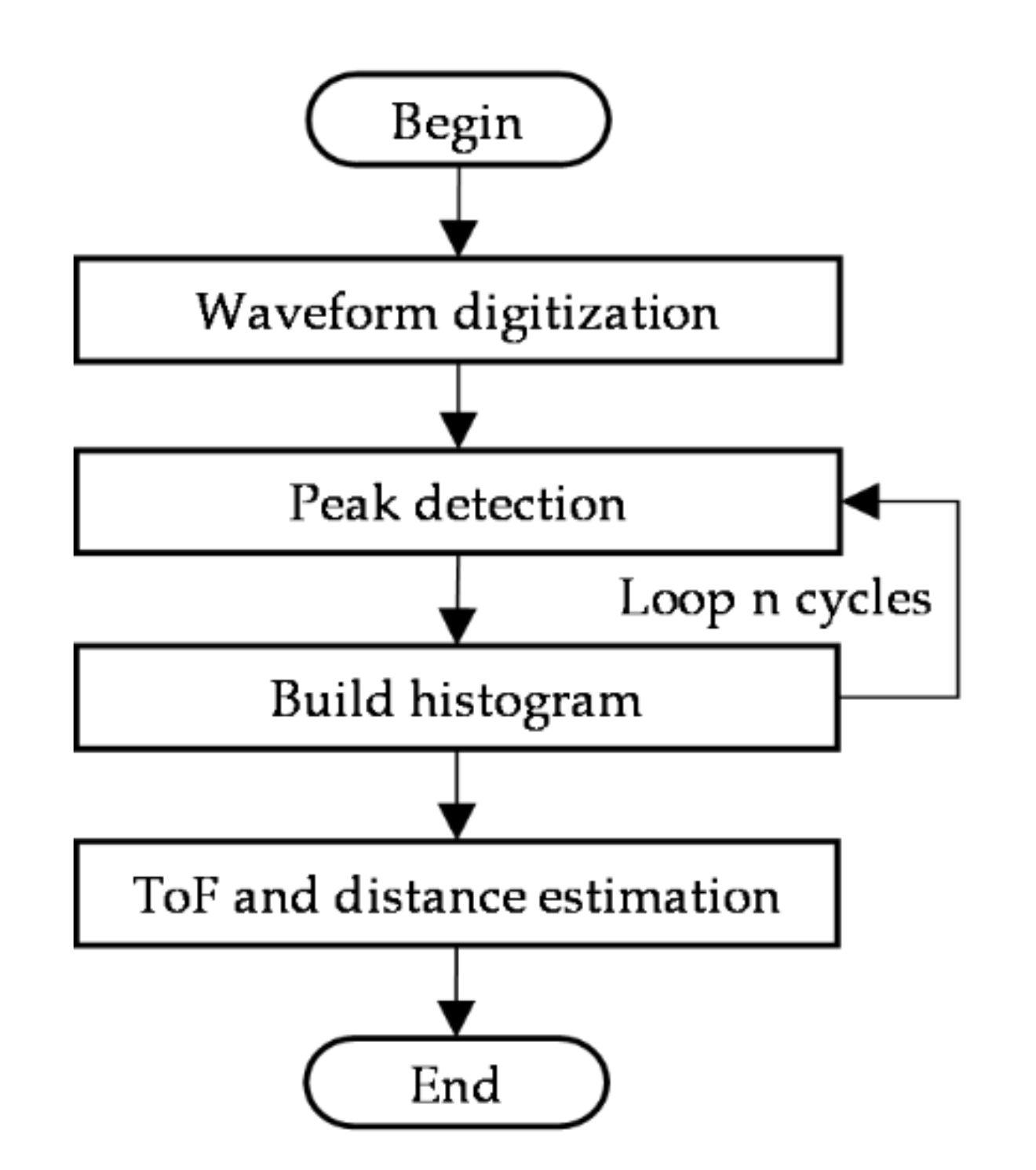
2.4. Signal Processing Block
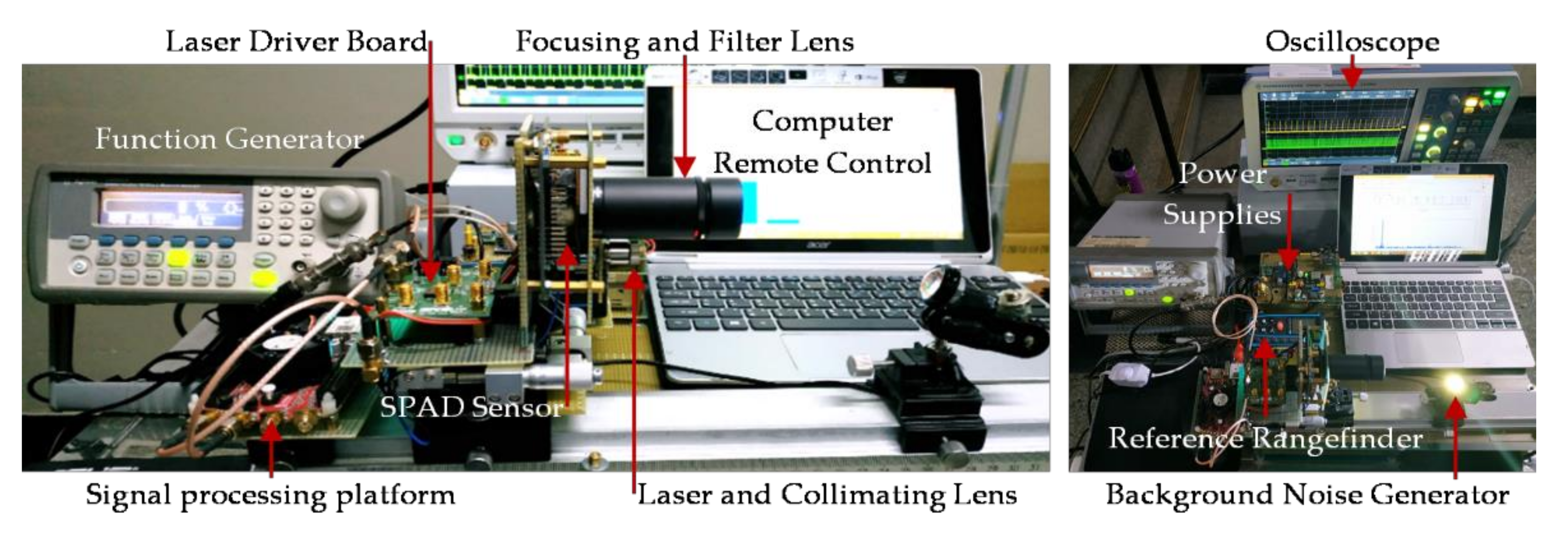
2.5. The System Prototype
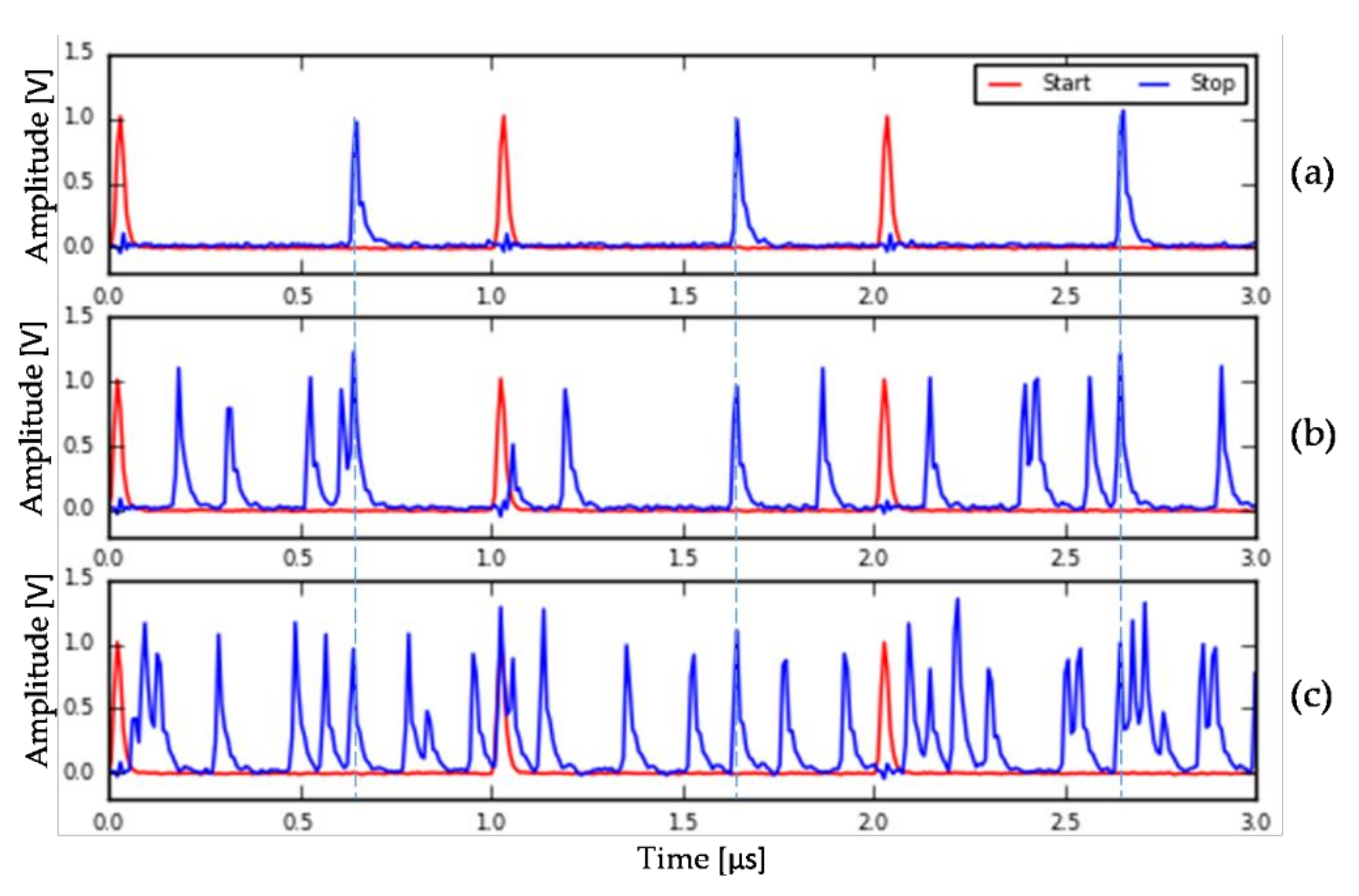
2.6. Initial Experiments
3. Methodology
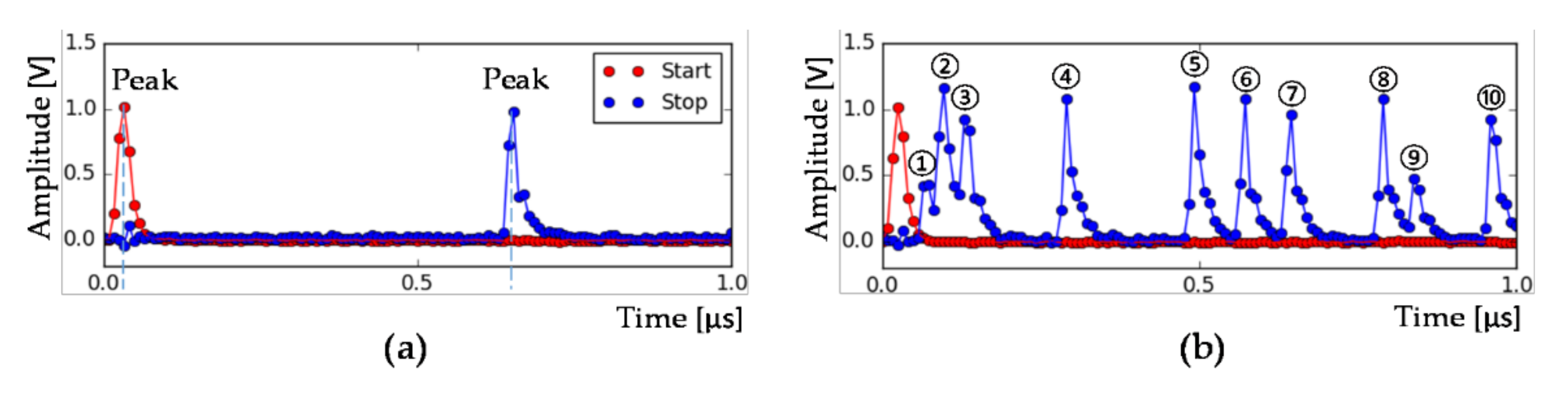
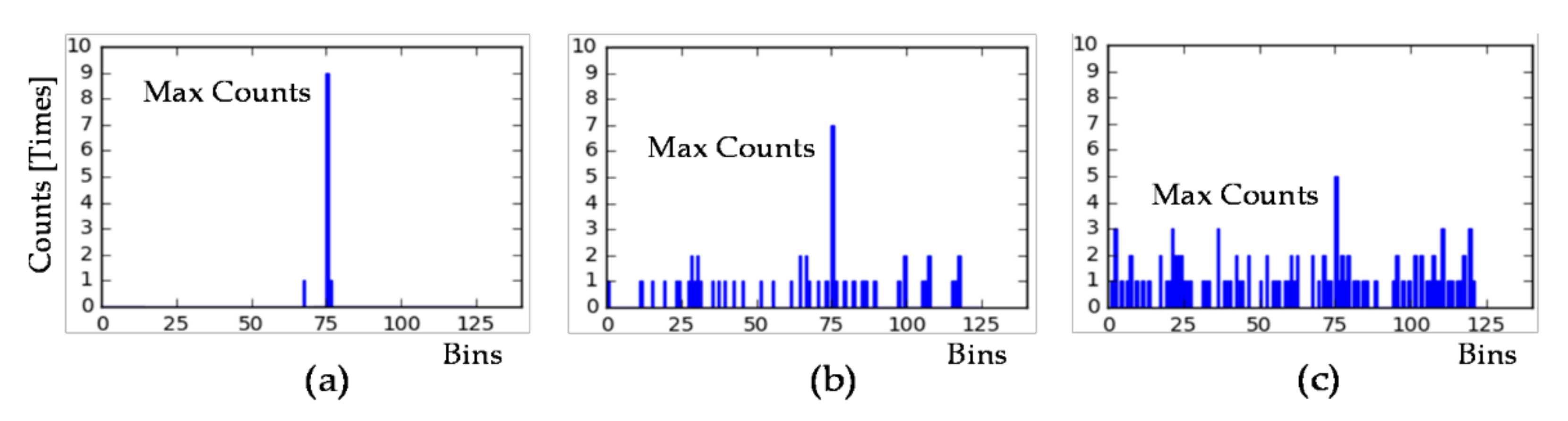
3.1. Peak Detection Method
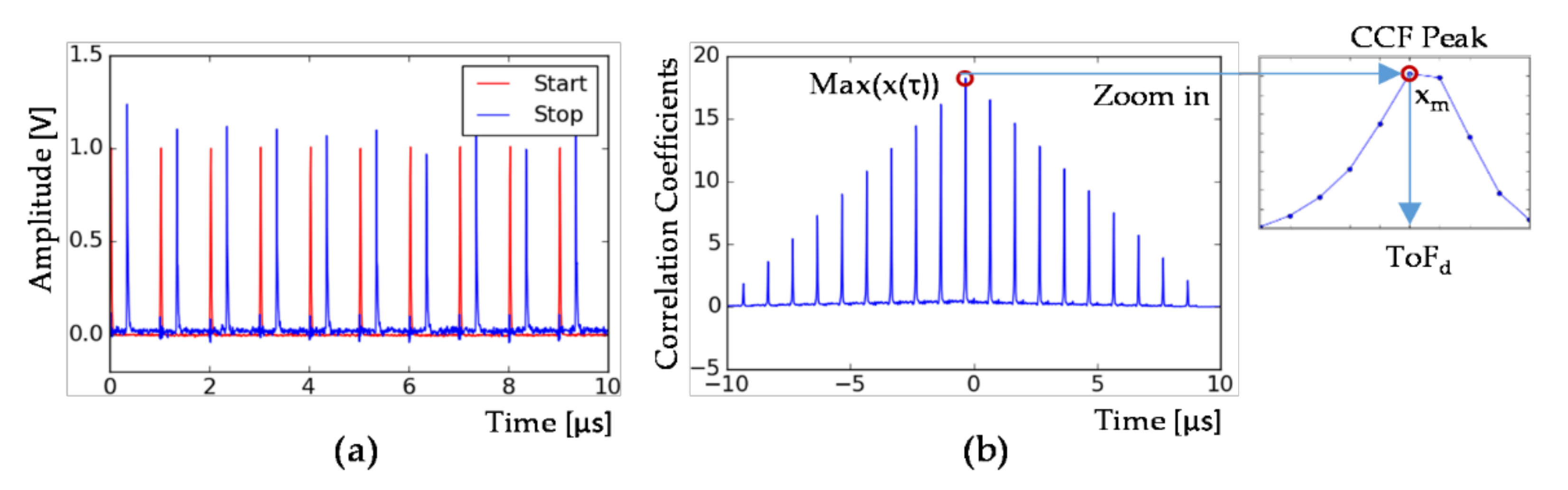
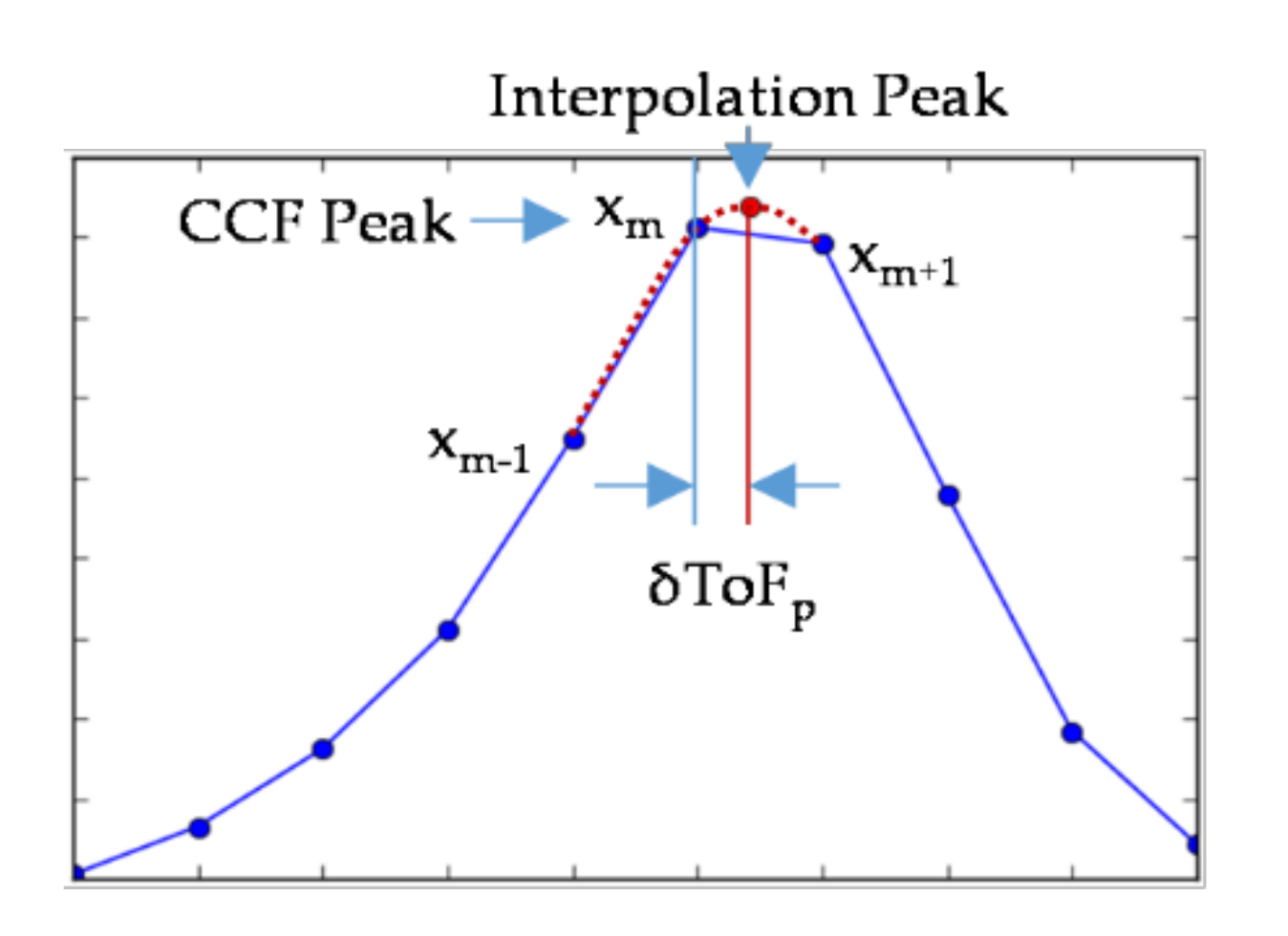
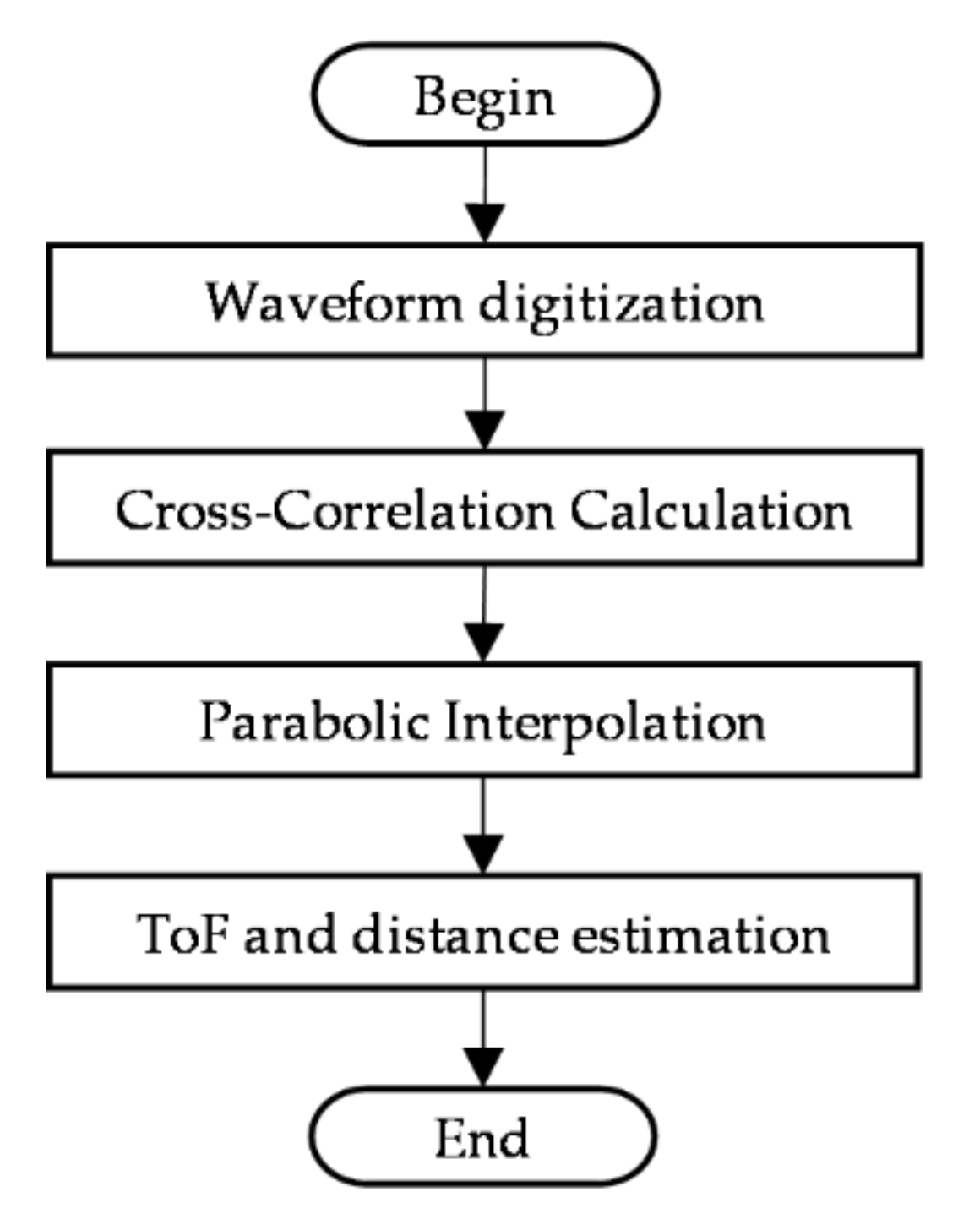
3.2. Cross-Correlation and Interpolation
4. Experimental Results
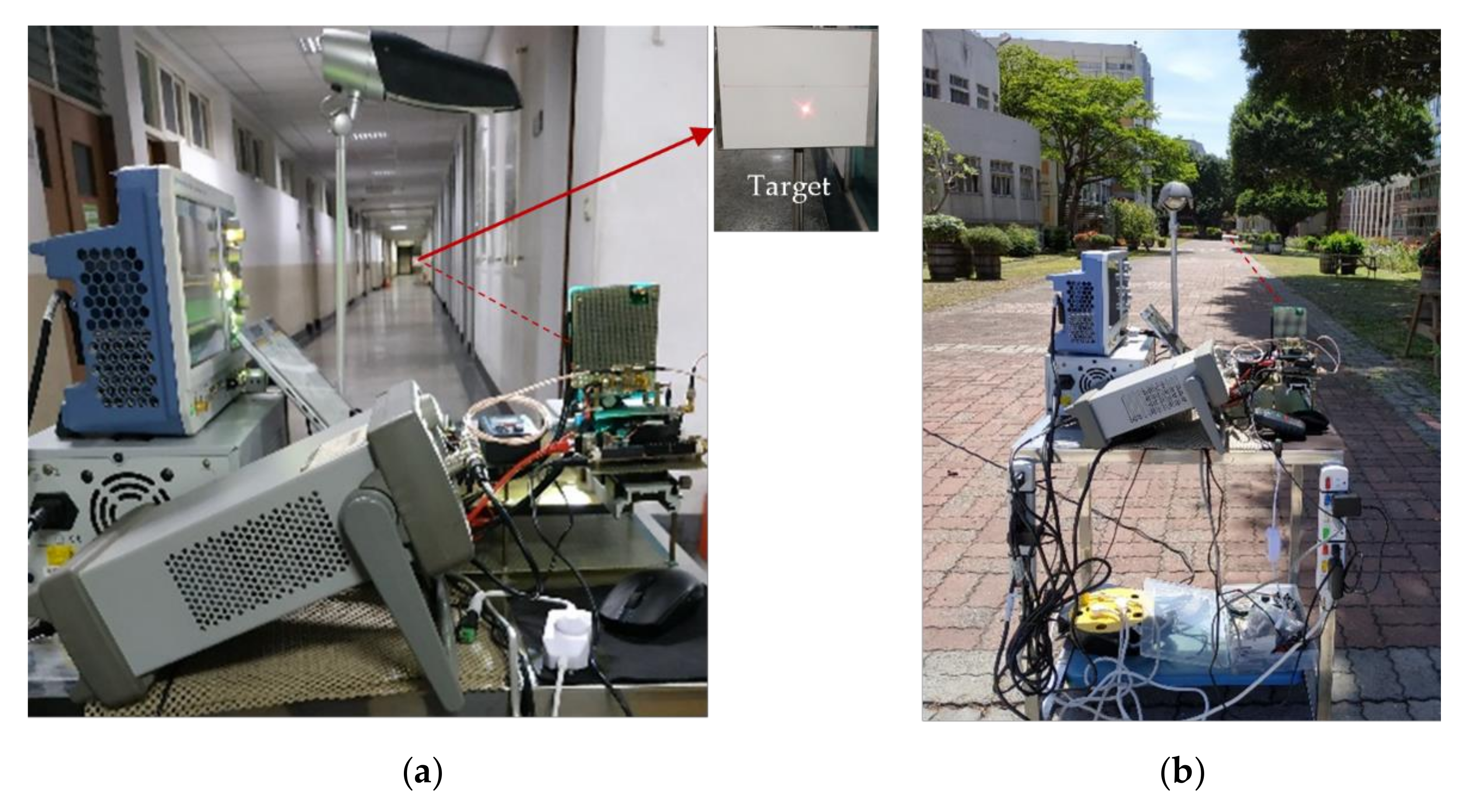
4.1. Experiment Setup and Evaluation Parameters
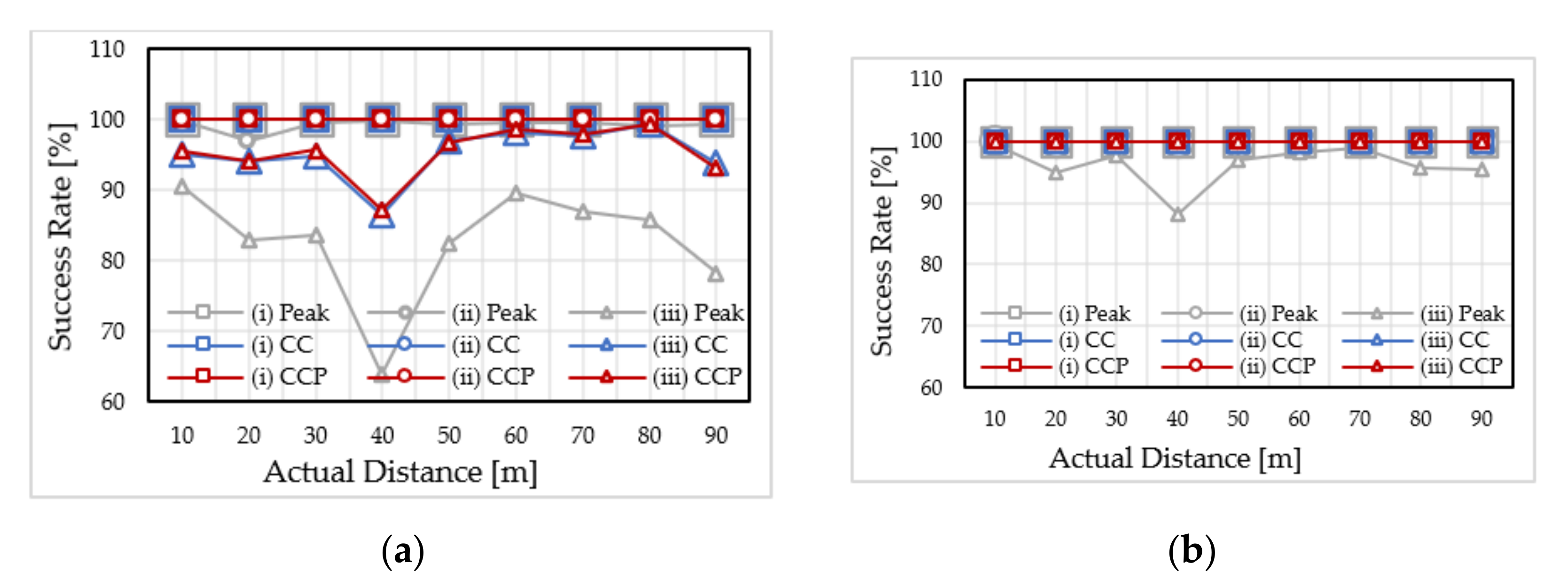
4.2. Assessing Effect of Background Light on the Success Measurement Rate and Execution Time
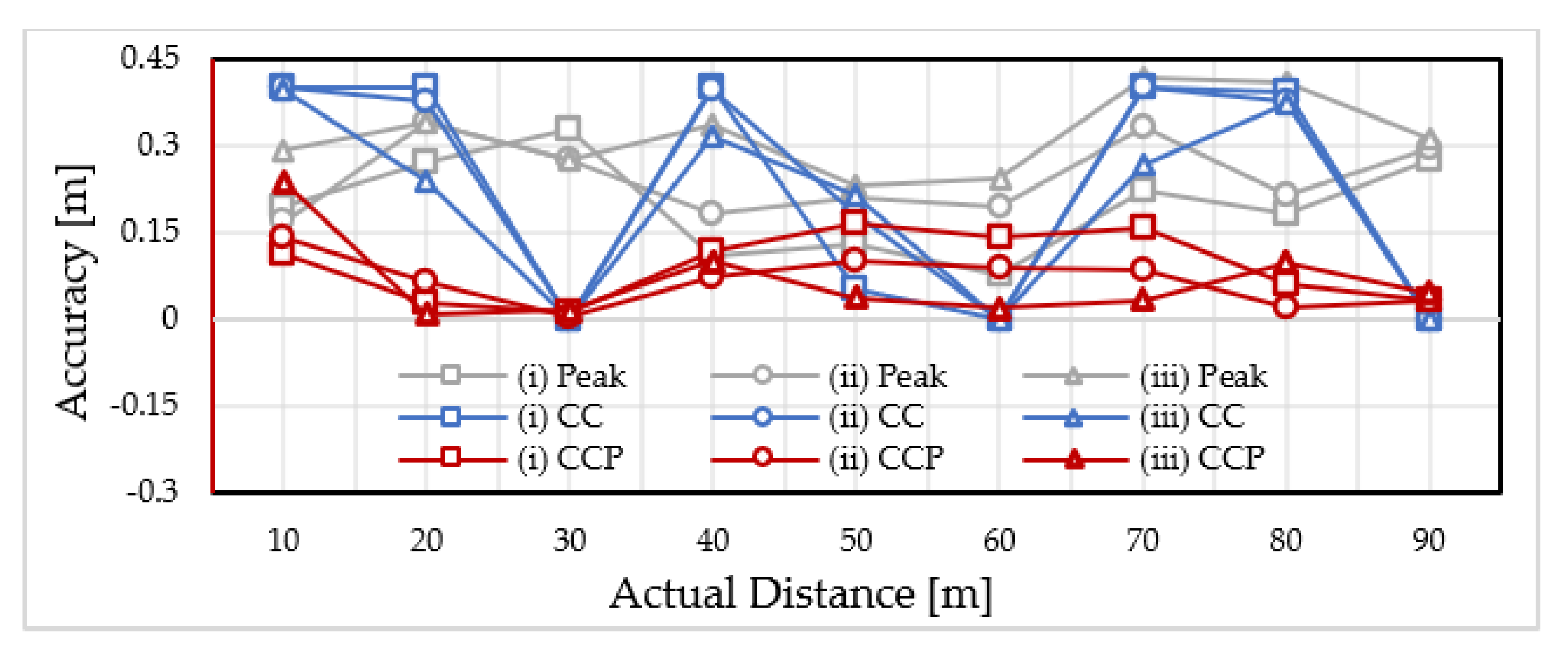
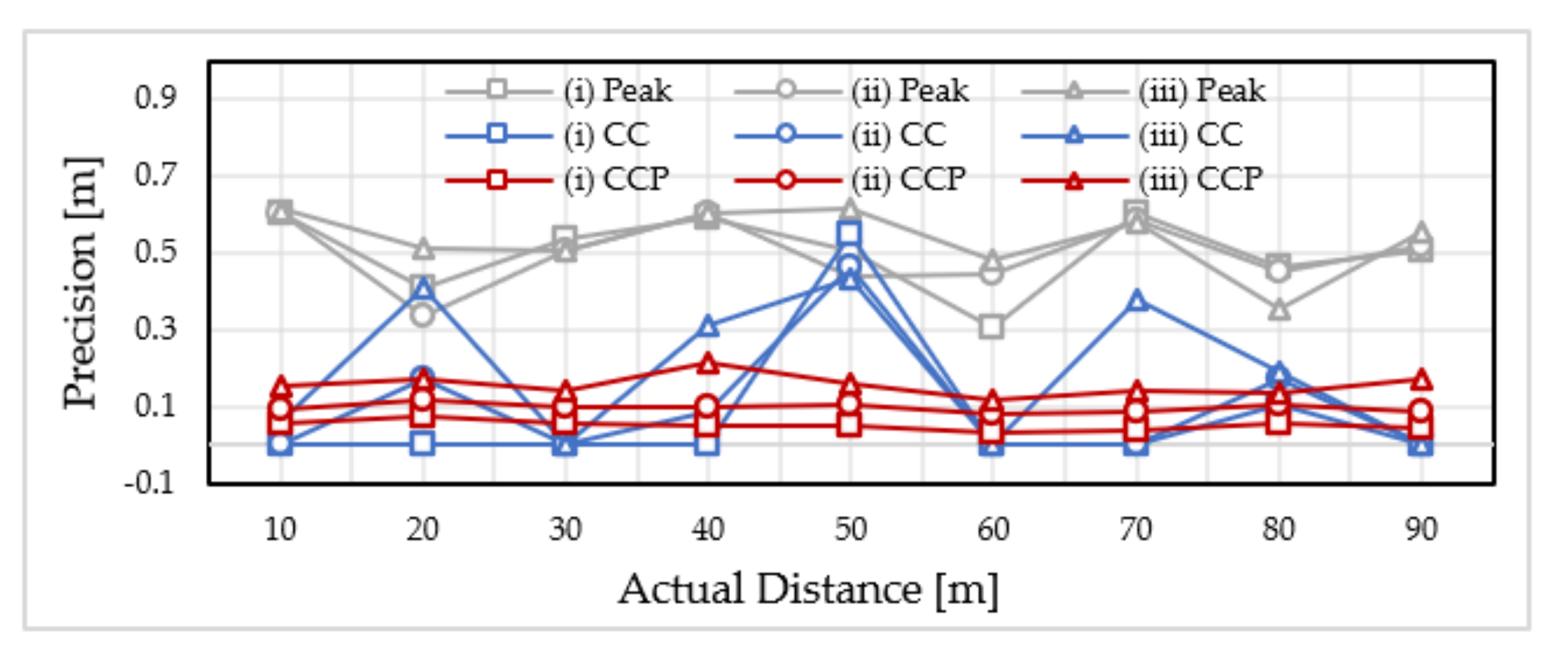
4.3. Comparing the Accuracy and Precision of Three Methods
4.4. Compare the Results with Recent Studies
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bengler, K.; Dietmayer, K.; Farber, B.; Maurer, M.; Stiller, C.; Winner, H. Three decades of driver assistance systems: Review and future perspectives. IEEE Intell. Transp. Syst. Mag. 2014, 6, 6–22. [Google Scholar] [CrossRef]
- Badue, C.; Guidolini, R.; Carneiro, R.V.; Azevedo, P.; Cardoso, V.B.; Forechi, A.; Jesus, L.; Berriel, R.; Paixão, T.M.; Mutz, F.; et al. Self-driving cars: A survey. Expert Syst. Appl. 2019, 165, 113816. [Google Scholar] [CrossRef]
- Chavez-Garcia, R.O.; Aycard, O. Multiple Sensor Fusion and Classification for Moving Object Detection and Tracking. IEEE Trans. Intell. Transp. Syst. 2016, 17, 525–534. [Google Scholar] [CrossRef]
- Hecht, J. Lidar for Self-Driving Cars. Opt. Photonics News 2018, 29, 26–33. [Google Scholar] [CrossRef]
- Zhao, M.; Mammeri, A.; Boukerche, A. Distance measurement system for smart vehicles. In Proceedings of the 2015 7th International Conference on New Technologies, Mobility and Security (NTMS), Paris, France, 27–29 July 2015; IEEE: Paris, France, 2015; pp. 1–5. [Google Scholar]
- Rapp, J.; Tachella, J.; Altmann, Y.; McLaughlin, S.; Goyal, V.K. Advances in Single-Photon Lidar for Autonomous Vehicles: Working Principles, Challenges, and Recent Advances. IEEE Signal Process. Mag. 2020, 37, 62–71. [Google Scholar] [CrossRef]
- Behroozpour, B.; Sandborn, P.A.M.; Wu, M.C.; Boser, B.E. Lidar System Architectures and Circuits. IEEE Commun. Mag. 2017, 55, 135–142. [Google Scholar] [CrossRef]
- Zang, S.; Ding, M.; Smith, D.; Tyler, P.; Rakotoarivelo, T.; Kaafar, M.A. The Impact of Adverse Weather Conditions on Autonomous Vehicles: How Rain, Snow, Fog, and Hail Affect the Performance of a Self-Driving Car. IEEE Veh. Technol. Mag. 2019, 14, 103–111. [Google Scholar] [CrossRef]
- Nadeem, I.; Alibakhshikenari, M.; Babaeian, F.; Althuwayb, A.A.; Virdee, B.S.; Azpilicueta, L.; Khan, S.; Huynen, I.; Falcone, F.; Denidni, T.A.; et al. A comprehensive survey on “circular polarized antennas” for existing and emerging wireless communication technologies. J. Phys. D Appl. Phys. 2021, 55. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Virdee, B.S.; Azpilicueta, L.; Naser-Moghadasi, M.; Akinsolu, M.O.; See, C.H.; Liu, B.; Abd-Alhameed, R.A.; Falcone, F.; Huynen, I.; et al. A Comprehensive Survey of “Metamaterial Transmission-Line Based Antennas: Design, Challenges, and Applications”. IEEE Access 2020, 8, 144778–144808. [Google Scholar] [CrossRef]
- Alibakhshikenari, M.; Babaeian, F.; Virdee, B.S.; Aissa, S.; Azpilicueta, L.; See, C.H.; Althuwayb, A.A.; Huynen, I.; Abd-Alhameed, R.A.; Falcone, F.; et al. A Comprehensive Survey on “Various Decoupling Mechanisms with Focus on Metamaterial and Metasurface Principles Applicable to SAR and MIMO Antenna Systems”. IEEE Access 2020, 8, 192965–193004. [Google Scholar] [CrossRef]
- Agishev, R.; Gross, B.; Moshary, F.; Gilerson, A.; Ahmed, S. Simple approach to predict APD/PMT lidar detector performance under sky background using dimensionless parametrization. Opt. Lasers Eng. 2006, 44, 779–796. [Google Scholar] [CrossRef]
- Sun, W.; Hu, Y.; MacDonnell, D.G.; Weimer, C.; Baize, R.R. Technique to separate lidar signal and sunlight. Opt. Express 2016, 24, 12949–12954. [Google Scholar] [CrossRef] [PubMed]
- Zhou, M.; Li, C.R.; Ma, L.; Guan, H.C. Land cover classification from full-waveform Lidar data based on support vector machines. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 447–452. [Google Scholar] [CrossRef]
- Cheng, Y.; Cao, J.; Hao, Q.; Xiao, Y.; Zhang, F.; Xia, W.; Zhang, K.; Yu, H. A novel de-noising method for improving the performance of full-waveform LiDAR using differential optical path. Remote Sens. 2017, 9, 1109. [Google Scholar] [CrossRef]
- Olsen, R.C.; Metcalf, J.P. Visualization and analysis of lidar waveform data. In Laser Radar Technology and Applications XXII, Proceedings of SPIE DEFENSE + SECURITY, Anaheim, CA, USA, 9–13 April 2017; Turner, M.D., Kamerman, G.W., Eds.; SPIE: Bellingham, WA, USA, 2017; Volume 10191. [Google Scholar] [CrossRef]
- Beer, M.; Haase, J.F.; Ruskowski, J.; Kokozinski, R. Background light rejection in SPAD-based LiDAR sensors by adaptive photon coincidence detection. Sensors 2018, 18, 4338. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, R.; Shen, C.; Dai, W. Anti-sunlight Jamming Technology of Laser Fuze. In Proceedings of the The 2018 International Conference on Computer Science, Electronics and Communication Engineering (CSECE 2018), Wuhan, China, 7–8 February 2018; Volume 80, pp. 59–63. [Google Scholar]
- Mei, L.; Zhang, L.; Kong, Z.; Li, H. Noise modeling, evaluation and reduction for the atmospheric lidar technique employing an image sensor. Opt. Commun. 2018, 426, 463–470. [Google Scholar] [CrossRef]
- Li, H.; Chang, J.; Xu, F.; Liu, Z.; Yang, Z.; Zhang, L.; Zhang, S.; Mao, R.; Dou, X.; Liu, B. Efficient lidar signal denoising algorithm using variational mode decomposition combined with a whale optimization algorithm. Remote Sens. 2019, 11, 126. [Google Scholar] [CrossRef]
- McManamon, P. LiDAR Technologies and Systems; SPIE: Bellingham, WA, USA, 2019; Volume 148, ISBN 9781510625396. [Google Scholar]
- Padmanabhan, P.; Zhang, C.; Charbon, E. Modeling and analysis of a direct time-of-flight sensor architecture for LiDAR applications. Sensors 2019, 19, 5464. [Google Scholar] [CrossRef] [PubMed]
- Tontini, A.; Gasparini, L.; Perenzoni, M. Numerical model of spad-based direct time-of-flight flash lidar CMOS image sensors. Sensors 2020, 20, 5203. [Google Scholar] [CrossRef] [PubMed]
- Niclass, C.; Soga, M.; Matsubara, H.; Kato, S.; Kagami, M. A 100-m Range 10-Frame/s 340 × 96-Pixel Time-of-Flight Depth Sensor in 0.18 μm CMOS. IEEE J. Solid-State Circuits 2013, 48, 559–572. [Google Scholar] [CrossRef]
- Niclass, C.; Soga, M.; Matsubara, H.; Ogawa, M.; Kagami, M. A 0.18 μm CMOS SoC for a 100-m-Range 10-Frame/s 200 × 96-Pixel Time-of-Flight Depth Sensor. IEEE J. Solid-State Circuits 2014, 49, 315–330. [Google Scholar] [CrossRef]
- Zhang, C.; Lindner, S.; Antolovic, I.M.; Mata Pavia, J.; Wolf, M.; Charbon, E. A 30-frames/s, 252 × 144 SPAD Flash LiDAR with 1728 Dual-Clock 48.8-ps TDCs, and Pixel-Wise Integrated Histogramming. IEEE J. Solid-State Circuits 2019, 54, 1137–1151. [Google Scholar] [CrossRef]
- Li, X.; Yang, B.; Xie, X.; Li, D.; Xu, L. Influence of waveform characteristics on LiDAR ranging accuracy and precision. Sensors 2018, 18, 1156. [Google Scholar] [CrossRef] [PubMed]
- Wagner, W.; Ullrich, A.; Melzer, T.; Briese, C.; Kraus, K. From Single-Pulse to Full-Waveform Scanners: Potential and Practical Challenges. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 201–206. [Google Scholar]
- Shan, J.; Toth, C.K. Topograpic Laser Ranging and Scanning: Principles and Processing, 2nd ed.; CRC: Boca Raton, FL, USA; London, UK; New York, NY, USA, 2018; ISBN 9781498772273. [Google Scholar]
- Li, C.; Chen, Q.; Gu, G.; Qian, W. Laser time-of-flight measurement based on time-delay estimation and fitting correction. Opt. Eng. 2013, 52, 076105. [Google Scholar] [CrossRef][Green Version]
- McCormick, M.M.; Varghese, T. An approach to unbiased subsample interpolation for motion tracking. Ultrason. Imaging 2013, 35, 76–89. [Google Scholar] [CrossRef] [PubMed]
- Reddy, V.R.; Gupta, A.; Reddy, T.G.; Reddy, P.Y.; Reddy, K.R. Correlation techniques for the improvement of signal-to-noise ratio in measurements with stochastic processes. Nucl. Instruments Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2003, 501, 559–575. [Google Scholar] [CrossRef]
- Gan, T.H.; Hutchins, D.A. Air-coupled ultrasonic tomographic imaging of high-temperature flames. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 1214–1218. [Google Scholar] [CrossRef] [PubMed]
- Lai, X.; Torp, H. Interpolation methods for time-delay estimation using cross-correlation method for blood velocity measurement. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 277–290. [Google Scholar] [CrossRef]
- de Jong, P.G.M.; Arts, T.; Hoeks, A.P.G.; Reneman, R.S. Experimental evaluation of the correlation interpolation technique to measure regional tissue velocity. Ultrason. Imaging 1991, 13, 145–161. [Google Scholar] [CrossRef]
- Parrilla, M.; Anaya, J.J.; Fritsch, C. Digital Signal Processing Techniques for High Accuracy Ultrasonic Range Measurements. IEEE Trans. Instrum. Meas. 1991, 40, 759–763. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Chabah, M.; Sintes, C. Correlation bias analysis—A novel method of sinus cardinal model for least squares estimation in cross-correlation. In OCEANS’15 MTS/IEEE Washington, Proceedings of OCEANS ’15, Washington, DC, USA, 19–22 October 2015; IEEE: Piscataway, NJ, USA, 2016; Volume 2. [Google Scholar] [CrossRef]
- Céspedes, I.; Huang, Y.; Ophir, J.; Spratt, S. Methods for Estimation of Subsample Time Delays of Digitized Echo Signals. Ultrason. Imaging 1995, 17, 142–171. [Google Scholar] [CrossRef] [PubMed]
- Svilainis, L.; Lukoseviciute, K.; Dumbrava, V.; Chaziachmetovas, A. Subsample interpolation bias error in time of flight estimation by direct correlation in digital domain. Measurement 2013, 46, 3950–3958. [Google Scholar] [CrossRef]
- eGaN FETs for Lidar—Getting the Most Out of the EPC9126 Laser Driver. Available online: https://epc-co.com/epc/Portals/0/epc/documents/application-notes/AN027Getting-the-Most-out-of-eGaN-FETs.pdf (accessed on 25 August 2021).
- Development Board EPC9126/EPC9126HC Quick Start Guide. Available online: https://epc-co.com/epc/Portals/0/epc/documents/guides/EPC9126xx_qsg.pdf (accessed on 21 September 2021).
- Kaldén, P.; Sternå, E. Development of a Low-Cost Laser Range-Finder (LIDAR). Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2015. [Google Scholar]
- Laser diode Mitsubishi ML101J25. Available online: https://www.laserdiodesource.com/files/pdfs/laserdiodesource_com/8597/ML101J25_MitsubishiElectric_datasheet-1589826744.pdf (accessed on 21 September 2021).
- Standards Australia Limited/Standards New Zealand. AS/NZS IEC 60825.1:2014; Safety of Laser Products Part 1: Equipment Classification and Requirements; Standards Australia Limited/Standards New Zealand: Sydney, NSW, Australia, 2014. [Google Scholar]
- Hsu, F.; Wu, J.; Lin, S. Low-noise single-photon avalanche diodes in 0.25 μm high-voltage CMOS technology. Opt. Lett. 2013, 38, 55–57. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.-Y.; Lu, P.-K.; Hsiao, Y.-J.; Lin, S.-D. Radiometric temperature measurement with Si and InGaAs single-photon avalanche photodiode. Opt. Lett. 2014, 39, 5515–5518. [Google Scholar] [CrossRef]
- Sangl, T.; Tsail, C. Time-of-Flight Estimation for Single-Photon LIDARs. In Proceedings of the 2016 13th IEEE International Conference on Solid-State and Integrated Circuit Technology (ICSICT), Hangzhou, China, 25–28 October 2016; Volume 1, pp. 750–752. [Google Scholar]
- Huang, W.-S.; Liu, T.-H.; Wu, D.-R.; Tsai, C.-M.; Lin, S.-D. CMOS Single-Photon Avalanche Diodes for Light Detection and Ranging in Strong Background Illumination. In Proceedings of the 2017 International Conference on Solid State Devices and Materials, Sendai, Japan, 19–22 September 2017; pp. 319–320. [Google Scholar]
- Tsai, S.Y.; Chang, Y.C.; Sang, T.H. SPAD LiDARs: Modeling and Algorithms. In Proceedings of the 2018 14th IEEE International Conference on Solid-State and Integrated Circuit Technology, ICSICT, Qingdao, China, 31 October–3 November 2018; pp. 1–4. [Google Scholar]
- Sang, T.-H.; Tsai, S.; Yu, T. Mitigating Effects of Uniform Fog on SPAD Lidars. IEEE Sensors Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Sang, T.H.; Yang, N.K.; Liu, Y.C.; Tsai, C.M. A method for fast acquisition of photon counts for SPAD LiDAR. IEEE Sensors Lett. 2021, 5, 7–10. [Google Scholar] [CrossRef]
- Welcome to the Red Pitaya. Available online: https://redpitaya.readthedocs.io/en/latest (accessed on 29 September 2021).
- LD100 100M Laser Distance Meter Range Finder. Available online: https://lasertoolspecialist.com.au/product/ld100-100m-laser-distance-meter-range-finder (accessed on 30 September 2021).
- Azaria, M.; Hertz, D. Time Delay Estimation by Generalized Cross Correlation Methods. IEEE Trans. Acoust. Speech Signal Process. 1984, 32, 280–285. [Google Scholar] [CrossRef]
- Viola, F.; Walker, W.F. A spline-based algorithm for continuous time-delay estimation using sampled data. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2005, 52, 80–93. [Google Scholar] [CrossRef]
- Svilainis, L. Review on Time Delay Estimate Subsample Interpolation in Frequency Domain. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2019, 66, 1691–1698. [Google Scholar] [CrossRef] [PubMed]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | [30] | [27] | This Work |
|---|---|---|---|
| Resolution of ADC | 4 × 500 Msps | 1 Gsps | 125 Msps |
| Accuracy (mean) | 2.43 cm | 7.4 cm | |
| Precision (mean) | 30 cm (2 ns) | 2.01 cm | 10 cm |
| Distance | 7.425 m | 10–46 m | 10–90 m |
| Experiment ambient | High noise | In lab | In lab and outdoor |
| Processing Unit | Host Computer CPU i5-6500, 3.2 Ghz 4 GB of RAM | Embedded platform ARM Cortex A9 667 Mhz 512 MB of RAM | |
| Number of sensors using | Two PIN sensors | Three PIN sensors | One Single-Pixel SPAD sensor |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.-T.; Cheng, C.-H.; Liu, D.-G.; Le, M.-H. Improvement of Accuracy and Precision of the LiDAR System Working in High Background Light Conditions. Electronics 2022, 11, 45. https://doi.org/10.3390/electronics11010045
Nguyen T-T, Cheng C-H, Liu D-G, Le M-H. Improvement of Accuracy and Precision of the LiDAR System Working in High Background Light Conditions. Electronics. 2022; 11(1):45. https://doi.org/10.3390/electronics11010045
Chicago/Turabian StyleNguyen, Thanh-Tuan, Ching-Hwa Cheng, Don-Gey Liu, and Minh-Hai Le. 2022. "Improvement of Accuracy and Precision of the LiDAR System Working in High Background Light Conditions" Electronics 11, no. 1: 45. https://doi.org/10.3390/electronics11010045
APA StyleNguyen, T.-T., Cheng, C.-H., Liu, D.-G., & Le, M.-H. (2022). Improvement of Accuracy and Precision of the LiDAR System Working in High Background Light Conditions. Electronics, 11(1), 45. https://doi.org/10.3390/electronics11010045